SIMPL (Slope Imaging Multi-Polarization Photon-Counting Lidar)
Airborne Sensors
SIMPL (Slope Imaging Multi-Polarization Photon-Counting Lidar)
SIMPL is an advanced airborne active lidar instrument of NASA/GSFC to demonstrate laser altimetry measurement methods and components that enable efficient, high-resolution, swath mapping of topography and surface properties from space. The instrument development is sponsored by the NASA IIP (Instrument Incubator Program) of ESTO (Earth Science and Technology Office).
In 2006/7, ESTO requested proposals for advanced topographic mapping instruments capable of providing precise elevation and imagery data for detailed monitoring of ice sheet, sea ice and glacier change. Although currently emphasizing these polar-region cryosphere objectives, the SIMPL approach is also applicable in other scientific applications where high-accuracy repeat imaging of elevation change is an important measurement. 1) 2) 3) 4)
SIMPL incorporates beam splitting of a micropulse laser, single-photon ranging and polarimetry technologies at green (532 nm) and near-infrared (1064 nm) wavelengths. The SIMPL approach utilizes short-pulse, high-rate, laser transmitters, photon-counting detectors, and high-speed, event timer electronics in a pushbroom configuration.
The NASA ICESat-2 mission, scheduled for launch in 2015, has a focus on monitoring ice sheet elevation change and sea ice thickness. ICESat-2 will employ several of the technologies advanced by SIMPL, including micropulse, single photon ranging in a multi-beam, pushbroom configuration operating at 532 nm.

Instrumentation
Transmitter
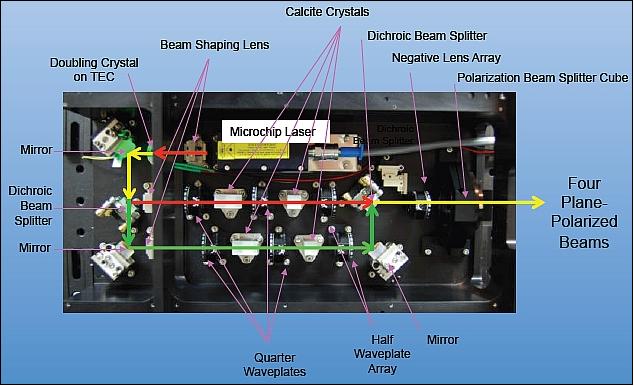
SIMPL’s laser transmitter and receiver optics are mounted on opposite sides of a thermally stable, 80 cm long optical bench and share the same 20 cm aperture off-axis parabola telescope in order to preserve alignment between the transmitter and receiver (Figure 2). The micropulse transmitter source is an 11.4 kHz pulse rate, 1064 nm (near infrared) microchip laser manufactured by Teem Photonics that emits ~8 µJ (microjoule) per pulse of linearly polarized light. The pulse width is approximately 1 ns (full-width at half the peak amplitude, FWHM) equivalent to 15 cm. The NIR output is frequency doubled to 532 nm (green) using a KTP nonlinear crystal. The dual wavelength beam is then spectrally separated using a dichroic beam splitter and each color goes through its own transmit optical path. Each optical path separates the beams into four beams with parallel polarization planes.
The two wavelength beam paths are then recombined using a dichroic filter such that the two colors on each of the four beams are co-aligned. A lens array is used to provide a specified beam divergence and angular spread of the four beams when transmitted toward the Earth’s surface through the telescope. The result is four 0.3 m laser footprints with each spaced cross-track by 8 m at the nominal flight altitude of 3.7 km.

Receiver
Laser energy reflected from the Earth’s surface is collected by the primary mirror and is directed into the receiver using turning mirrors. A lens assembly focuses the received beams onto a pinhole plate that has a 1 x 4 pinhole array. The pinholes define the detector fields of view (FOV) that are 0.9 m at the nominal flight altitude. The FOVs are small, only three times the size of the transmit beam divergence, to provide strong spatial filtering of solar background radiation.
The 532 and 1064 nm beams are then separated by a dichroic plate and each wavelength is further decomposed into signals with polarization parallel and perpendicular to the transmit polarization plane. The end result is four beam arrays that each have a particular wavelength and polarization state, yielding 16 signal channels. Each beam array passes through a mechanical iris used to control the effective receiver aperture and thus control signal and solar background count rates.
Using fibers the 16 channels are passed through spectral filter assemblies to further reduce the solar background noise. Fibers are then used to transfer the filtered light to 16 SPCMs (Single Photon Counting Modules) manufactured by Perkin Elmer. SPCMs are silicon avalanche photodiodes (Si:APD) that emit an electrical pulse upon detection of a single photon. SPCM’s are used because they are the only mature, single photon, time-resolved detectors with sensitivity at both 532 nm and 1064 nm. Their 532 nm QE (Quantum Efficiency) is between 60 to 70% whereas the 1064 nm QE is very low, at about 2%. A disadvantage of the SPCM’s is that after detection of a photon they have a dead time of ~ 50 ns (7.5 m) during which additional received photons cannot be detected. The dead time causes a range that is too short if one or more signal photons per laser pulse are received within 50 ns of the first detected photon. To avoid a range bias, the probability of detecting a signal photon per laser fire on each channel is controlled, using the mechanical irises and by changes in flight altitude, to nominally be below 30% so that the probability of two signal photons being received within 50 ns is small.
Electronics
Upon detection of a photon, the electrical pulse from an SPCM is transmitted to one of four custom electronics interface cards. Each card receives signals from a four-beam array, consisting of signals for a wavelength and polarization state. In addition, a signal for each laser fire time and a GPS once-per-second pulse are distributed to each card. In each card, the signals from four detectors, start pulse and GPS time tick are temporally offset, combined together and uniquely tagged. The combined events are transmitted to one of four P7889 event timer cards, manufactured by FAST ComTec, that are housed in the flight computer. The cards time tag each event with 100 ps resolution. The high precision timing and short laser pulse width achieve a single photon range precision of ~7 cm.
Data System
A sustained data rate up to 22 million time-tagged events per second recorded to RAID disk storage has been achieved by the data system. Photon detection events are not range gated; following a laser fire, detection events are recorded for all ranges from just outside the aircraft to a distance of 13 km. In this way, atmospheric profiling can be done to characterize cloud cover conditions through which the ranging measurements are made. The 22 million events per second data rate accommodates the maximum expected solar background noise counts acquired from throughout the 13 km range window assuming a high solar inclination angle, a highly reflective surface such as snow and fully open irises. Because detection events from throughout the 13 km window are recorded noise counts dominate the detection events; typically only a few percent or less of the events are returns reflected from the surface. Post-flight processing software unpacks the data and sorts it by laser wavelength and polarization and computes the UTC event time and time-of-flight for each detected photon.
Ancillary instrumentation consists of an Applanix Pos-AV system that provides orientation, position and time information and a nadir-viewing, digital video camera with latitude, longitude and time labeling to document the flight line.
The SIMPL flights have been conducted on the NASA Lear-25 aircraft operated by NASA/GRC (Glenn Research Center). The Lear-25 has a nadir viewing, optical port over which the optical bench is installed in a mounting frame. The additional SIMPL instrumentation is installed in two half-height 19-inch flight racks, including the fiber-coupled SPCM detectors, power supplies, power meter, laser and temperature controllers, video equipment, receiver electronics, flight computer and RAID storage.
Measurement Characteristics
The fundamental character of the SIMPL data is a “point cloud” profile of single photon ranges including spatially correlated surface returns and randomly distributed solar background noise (Figure 5). Aggregation of returns from a surface yields a range histogram that is a function of the transmit pulse shape, laser fire timing jitter, receiver bandwidth, surface “slope” (the incident angle between the laser beam and the surface normal), surface roughness at the laser footprint scale, and penetration into the surface and resulting volume scattering if the material is partly transparent at the laser wavelength.
The SIMPL transmit pulse shape consists of two components, a main pulse, that is slightly asymmetric and positively skewed, and a broader, weaker after-pulse that occurs 8.3 ns (1.25 m) after the main pulse. At 1064 nm the amplitude of the after-pulse is 20% of the main pulse. Frequency doubling to 532 nm reduces the amplitude of the after-pulse to 6% of the main pulse. The instrument impulse response, established by laboratory measurements of the return from a smooth, non-transparent surface perpendicular to the laser beam, accounts for the transmit pulse, timing jitter and receiver bandwidth. For SIMPL the impulse response of the main pulse is 1 ns FWHM, equivalent to 15 cm. Broadening of the range histogram main pulse beyond 1 ns is due to the combined effects of surface slope, roughness and penetration.
The amplitude of the range histogram depends on the probability of detection (PD), defined as the ratio of received photons reflected from the surface versus the number of transmitted pulses. The PD is a function of the surface retro-reflectance (at 0º phase angle with parallel illumination and view angles), ranging distance, atmospheric transmission and instrument parameters including transmit energy, telescope aperture, iris vignetting, beam to pinhole alignment, receiver optical throughput and detector sensitivity. At the 11.4 kHz pulse rate and nominal aircraft ground speed, flight altitude and iris aperture settings, single photons are typically acquired from ice surfaces every 3, 4, 6 and 9 cm for the 532 nm parallel (\||\||) and perpendicular (_\||_) channels and the 1064 nm \||\|| and _\||_ channels, respectively.

Flight of SIMPL on Lake Erie
The SIMPL instrument can be flown on Learjet-25, P-3,or on the Twin Otter aircraft. SIMPL acquired data over Lake Erie on February 25, 2009 when the ice cover was extensive (Figure 6). The ice cover, analogous to young sea ice, was a heterogeneous amalgam of fresh skim ice, thin dark and light nilas ice, and fractured areas of new grey ice and thicker new grey-white ice. There are extensive areas of breccia consisting of ice pieces of different types and sizes frozen together. The lake ice was covered by snow in some places and broken by open water leads and polynya (non-linear shaped openings enclosed in ice).

Measurement results for Lake Erie are illustrated using a ~260 m long flight segment crossing an open water lead, a polynya covered by skim ice, dark nilas ice and new grey-white ice (Figures 7, 8 and 9).
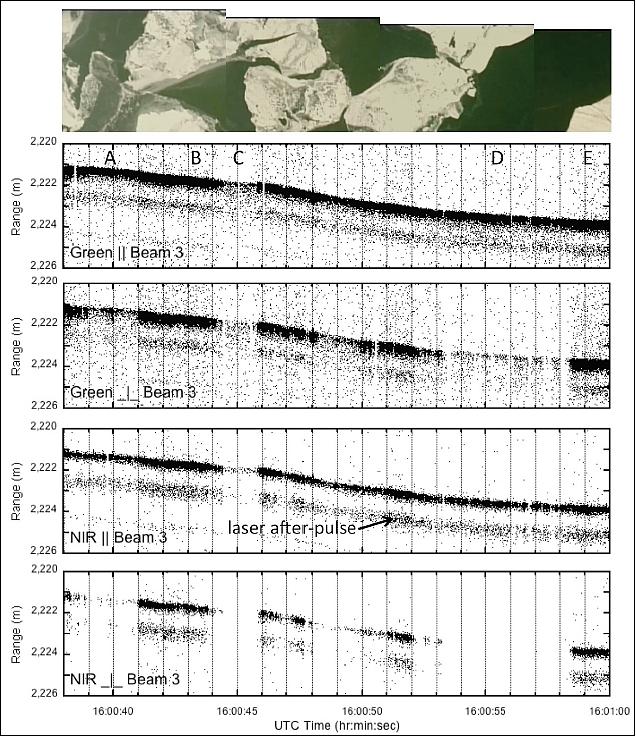
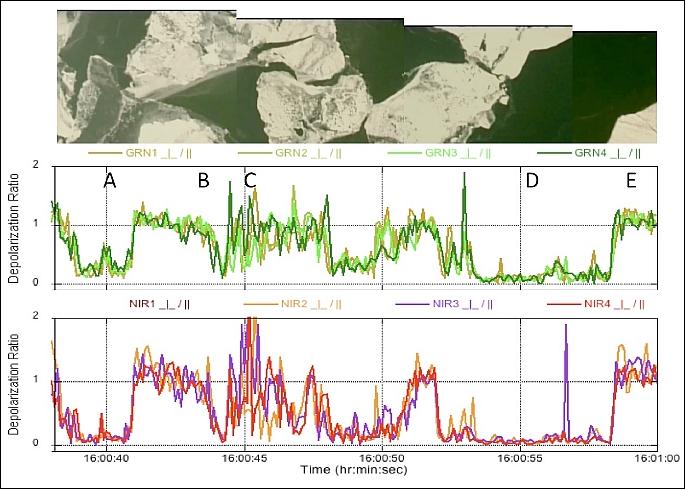
Legend to Figure 7: From top to bottom they are the 532 nm parallel and perpendicular channels and the 1064 nm parallel and perpendicular channels. The profile location is along the bottom edge of the video frame composite. Based on interpretation of the video, four surface types occur along the profile: dark nilas ice (A), new grey-white ice (B, E), polynya covered by skim ice (C) and an open water lead (D). The profile length is ~ 260 m. The surface slope is due to uncompensated aircraft roll. The surface echo is due to the laser after-pulse. The vertical exaggeration is 43x.
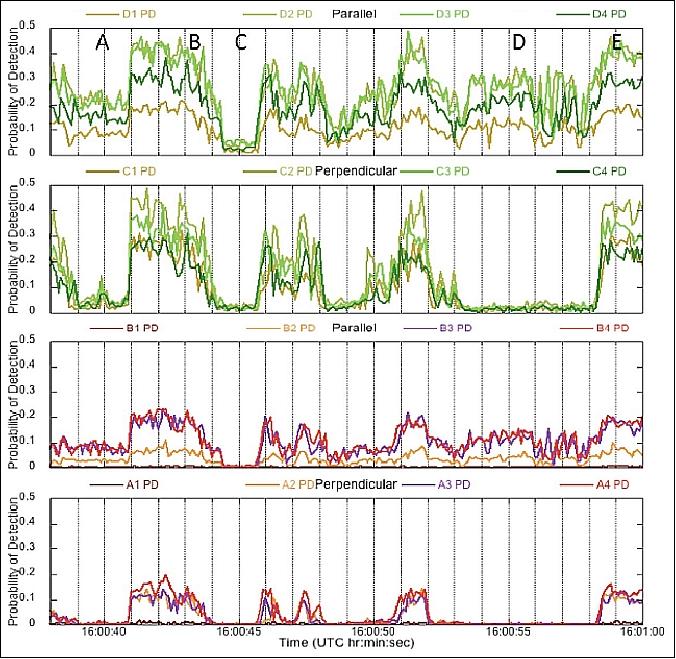
Legend to Figure 8: The channel order is the same as that of Figure 7. No 1064 nm \||\|| nor _\||_ signal is detected for Beam 1 due to very low transmit energy and beam to pin-hole misalignment observed while optically aligning the instrument.
Figure 8 shows the PDs for the same flight segment, computed for one-second increments, for the four channels along the four beams. Significant variability is observed between the channels and along the profiles. Between-beam consistency at short length scales for each channel indicates that the variability is not noise. Amplitude differences between a channel’s four beams are due to instrumental effects. Changes in PD are correlated with surface types having different reflectance and scattering properties.
For single scatter events the reflecting photon’s polarization plane remains parallel to that of the transmit pulse. In the case of specular reflection from a mirror-like surface or from water, consisting only of single scattering, all reflected energy retains a parallel polarization plane. This accounts for the lack of 1064 nm _\||_ signal from open water (D). The strength of the 532 and 1064 nm \||\|| signal specularly reflected back to the receiver depends on the fraction of the water surface that is oriented perpendicular to the incident beam. That depends on the water surface roughness, primarily a function of wind speed.
The changes in PD for the different surface conditions result in distinctive depolarization ratios, computed as the ratio _\||_ PD / \||\|| PD. A completely specular return has a depolarization ratio of 0. With increasing multiple scattering, the depolarization ratio increases. Figure 9 shows depolarization ratios for the same flight segment depicted in Figures 7 and 8. The ratios are normalized by the depolarization of a snow calibration surface, so that a surface with a value of 1 has depolarization equivalent to that of the snow target.
Values greater than 1 are due to scattering causing depolarization greater than that of snow. The equivalent ratios, per wavelength, for each of the beams spaced cross-track by ~8 m indicates that they are traversing surfaces with the same scattering properties, except for a short segment occurring at 16:00:50. The open water (D) has very low and near-zero 532 and 1064 nm ratios, respectively. The nilas ice (A) ratios are similar except for a higher ratio corresponding to a lighter ridge observed in the video frame. The new white-grey ice (B, E) has ratios comparable to that of the snow calibration target. The polynya with the skim ice cover has noisy ratios due to the very low \||\|| signals at both 532 and 1064 nm.
SIMPL and the ICESat-2 Mission
The experience gained concerning micropulse, single-photon ranging of cryosphere surfaces using SIMPL is benefiting formulation activities for the ICESat-2 mission. ICESat-2 will be a follow-on to NASA’s ICESat ( Ice, Cloud and land Elevation Satellite) that operated between 2003 and 2009. ICESat had a primary measurement goal of ice sheet elevation change and secondary goals for land topography, forest canopy height and atmosphere cloud and aerosol profiling.
During the course of the mission measurement of sea ice thickness and its change became an additional area of primary focus. Its single instrument,GLAS (Geoscience Laser Altimeter System), utilized a single-beam, 40 Hz, high pulse energy laser transmitter and the receiver combined a 1064 nm laser altimeter with 3 cm ranging precision and a 1064 and 532 nm cloud and aerosol lidar that profiled the atmosphere with 75 m vertical sampling. The analog 1064 nm channels acquired ranging data using the traditional measurement approach, waveform digitization of strong return pulses, whereas the 532 nm lidar channel utilized single photon ranging with SPCM detectors.
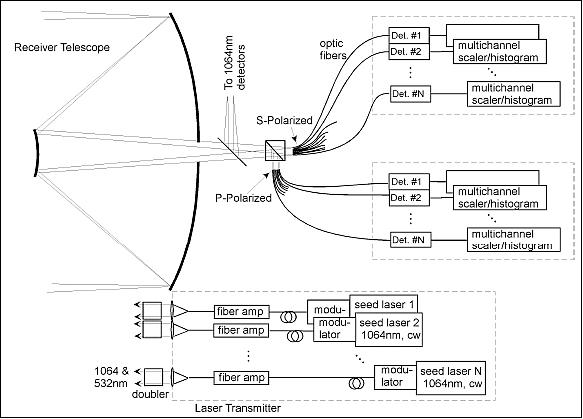
The ICESat-2 follow-on mission, scheduled for launch in 2015, has the same objectives as ICESat but will employ the measurement approach used by SIMPL. It will utilize a micropulse laser with a narrow pulse width (several ns) operating at a high pulse repetition rate (10 - 15 kHz). The low transmit pulse energy will be divided into a multiple beam, pushbroom configuration (Figure 10). The receiver will conduct all ranging using time-tagged single photon detection at 532 nm, currently planning use of PMT (Photomultiplier Tube) array detectors, with 100 ps timing resolution electronics.

References
1) David J. Harding, James B. Abshire, Phillip W. Dabney, Ted A. Scambos, Antonios A. Seas, Christopher A. Shuman, Xiaoli Sun, “The Swath Imaging Multi-polarization Photon-counting Lidar (SIMPL): A Technology Demonstration for Space-based Laser Altimeter Swath Mapping,” URL: http://esto.nasa.gov/conferences/nstc2007/papers/Harding_David_B7P4_NSTC-07-0150.pdf
2) David J. Harding, James B. Abshire, Phillip W. Dabney, et al., “The Swath Imaging Multi-Polarization Photon-Counting Lidar (SIMPL): A Spaceflight Prototype,” Proceedings of IGARSS 2008 (IEEE International Geoscience & Remote Sensing Symposium), Boston, MA, USA, July 6-11, 2008, WE4.210.5, abstract URL: http://www.igarss08.org/Abstracts/pdfs/2378.pdf
3) David Harding, Philip Dabney, James Abshire, Tim Huss, Gabriel Jodor, Roman Machan, Joe Marzouk, Kurt Rush, Antonios Seas, Christopher Shuman, Xiaoli Sun, Susan Valett, Aleksey Vasilyev, Anthony Yu, Yunhui Zheng, “The Slope Imaging Multi-Polarization Photon- Counting Lidar: an Advanced Technology Airborne Laser Altimeter,” NASA ESTF (Earth Science Technology Forum), June 22-24, 2010, Arlington, VA, USA, paper URL: http://esto.nasa.gov/conferences/estf2010/papers/Harding_David_ESTF2010.pdf, presentation URL: http://esto.nasa.gov/conferences/estf2010/presentations/Harding_ESTF2010_A7P3.pdf
4) Philip Dabney, David Harding, James Abshire, Tim Huss, Gabriel Jodor, Roman Machan, Joe Marzouk, Kurt Rush, Antonios Seas, Christopher Shuman, Xiaoli Sun, Susan Valett, Aleksey Vasilyev, Anthony Yu, Yunhui Zheng, “The Slope Imaging Multi-polarization Photon-counting Lidar: Development and performance results,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).