ISS: Int-Ball (JEM Internal Ball Camera)
Human Spaceflight
ISS Utilization: Int-Ball (JEM Internal Ball Camera)
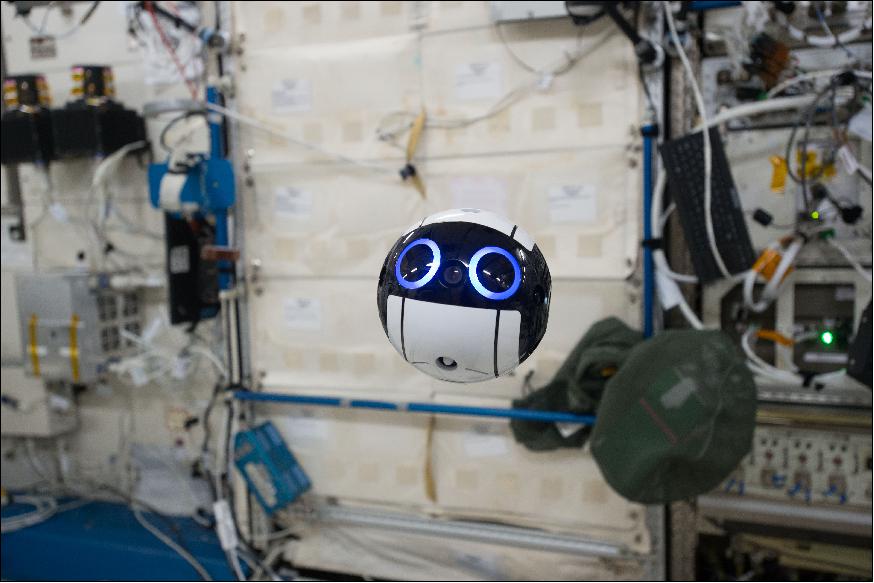
JAXA (Japan Aerospace Exploration Agency) has for the first time disclosed images and movies taken by the JEM Internal Ball Camera, called Int-Ball, its first camera drone that can record video while moving in the zero-gravity space environment under remote control from the ground. 1) 2) 3)
Int-Ball was delivered to Japanese Experiment Module "Kibo" on the International Space Station by the U.S. Dragon spacecraft (on the CRS-11 resupply mission) launched on June 4, 2017, and is currently undergoing initial verification.
Objectives of the Project
• Currently, when working in the Japanese Experiment Module ("Kibo"), the crew (astronaut) often takes photos with existing wall-mounted cameras having many blind spots at low resolution. Sometimes the crew also uses handheld cameras to monitor conditions in detail (video and photos).
• The crew spends about 10% of their current working hours to prepare cameras and engage in photographing operations.
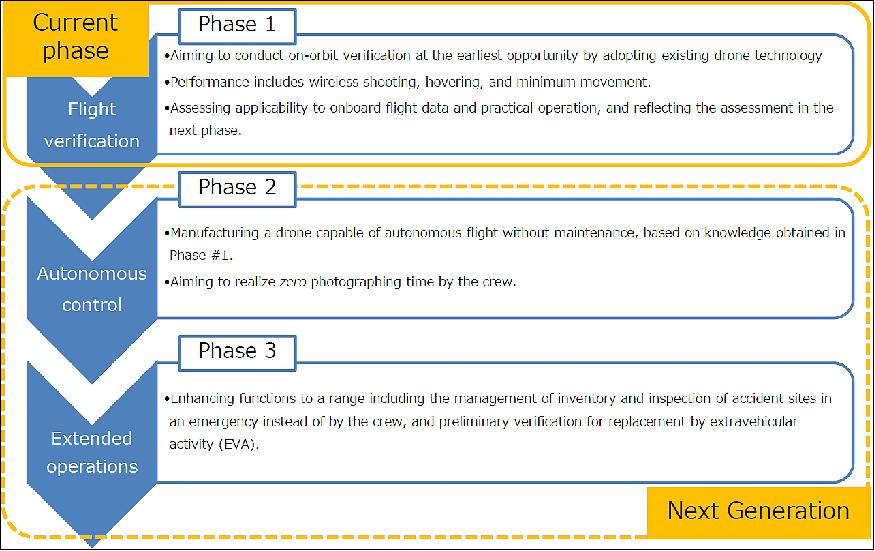
• To reduce the time required for shooting videos/photos, JAXA has developed the JEM Internal Ball Camera ("Int-Ball") that moves autonomously to the desired spatial position and shoots videos/photos of the subject, ultimately aiming to realize zero photographing time by the crew.
• The objective of this project is to contribute to maximizing the outcome of "Kibo" utilization experiments through productive use of the limited time in space by effectively conducting space experiments, which have become increasingly sophisticated and complicated, under cooperation between on the ground and in space.
• JAXA will strive to further improve next-generation Int-Ball performance, enhance its functions, and promote the automation and autonomy of intra- and extra-vehicular experiments, while seeking to acquire robotics technology available for future exploration missions.
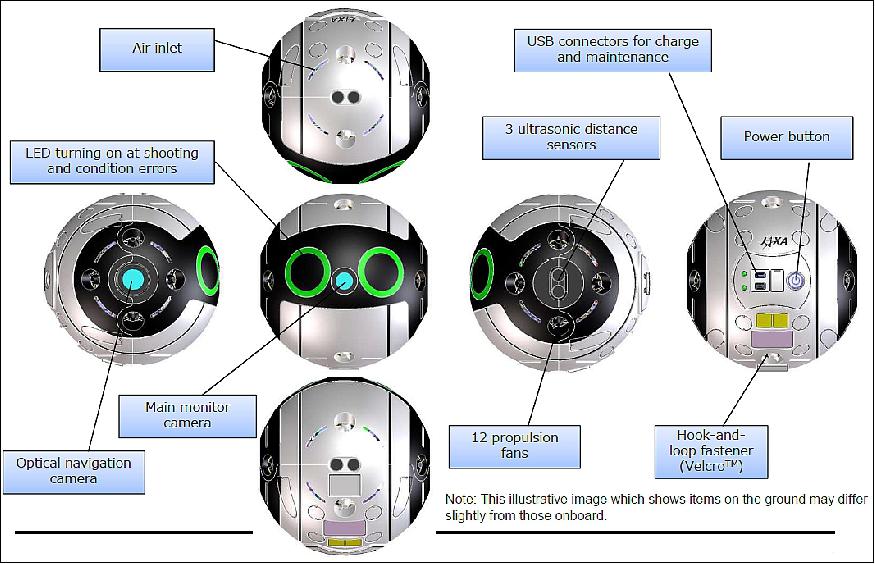
Features of Int-Ball
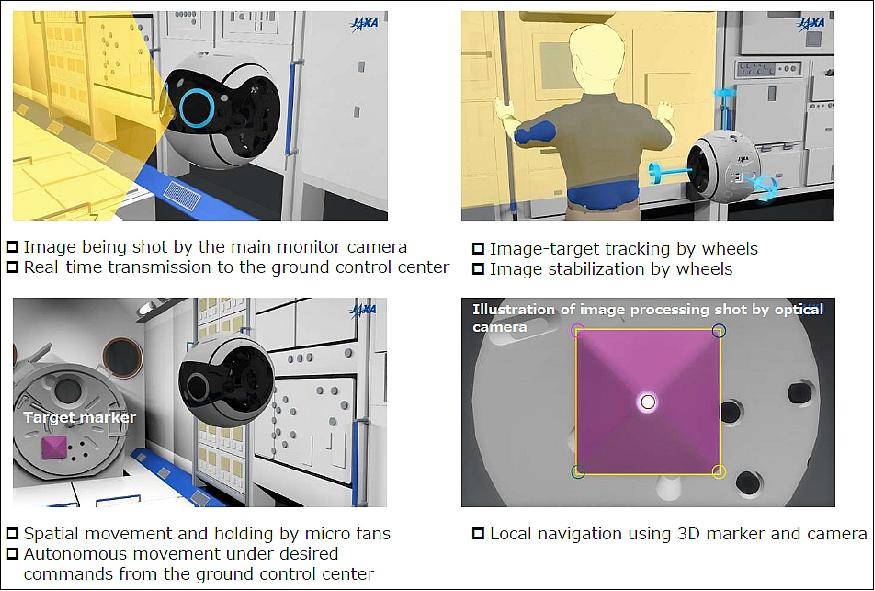
• The camera can move autonomously in space and record still and moving images under remote control by the JAXA Tsukuba Space Center.
• The recorded images and videos can be checked in real time by flight controllers and researchers on the ground, and then be fed back to the onboard crew.
• The camera adopts existing drone technology and its exterior and inner structures were all manufactured by 3D-printing.
Objectives of Int-Ball:
• Acquiring the capability to move anywhere at any time via autonomous flight and record images from any angle.
• Realizing "zero" photographing time by the onboard crew in the end, which amounts to about 10% of their working hours at present.
• Enabling flight controllers and researchers on the ground to check the crew's work from the same viewpoint as the crew. The effective cooperative work between in space and on the ground will contribute to maximized results of "Kibo" utilization experiments.
• Striving to further improve Int-Ball's performance, enhance its functions, and promote the automation and autonomy of extra- and intra-vehicular experiments, while seeking to acquire the robotics technology available for future exploration missions.

Item | Specification |
Photographing | Photo / Video (no audio) |
Position control | Micro fans (Axial flow type) |
Attitude control | Reaction wheels / Micro fans |
Communication | Wireless transmission (Wireless LAN) |
Resolution | HD, 720 pixels: 1280 x 720 pixels FHD, 1080 pixels: 1920 x 1080 pixels |
Self-localization | Image recognition using 3D marker |
Frame rate | 10 - 30 fps |
Dimension | 150 mm in diameter |
Bit rate | 16 kbit/s – 40 Mbit/s |
Instrument mass | 1 kg (not including cables and 3D marker) |
Image stability | Bandwidth: Pan: 1 Hz or less, Tilt and Roll: 0.3 Hz or less, Attitude stability: ±1 º/s or less |
Battery life | Approx. 2 hours (Rechargeable via USB connector) |

Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module
Reducing the mass and volume of the equipment (including sensors and actuators) necessary for attitude control to the greatest possible extent is effective in reducing the size and cost of a satellite and saving its space. This research also covers the research and development of a small module that can be mounted onboard a satellite as a package consisting of wheels and gyroscopes. 4) 5) 6)
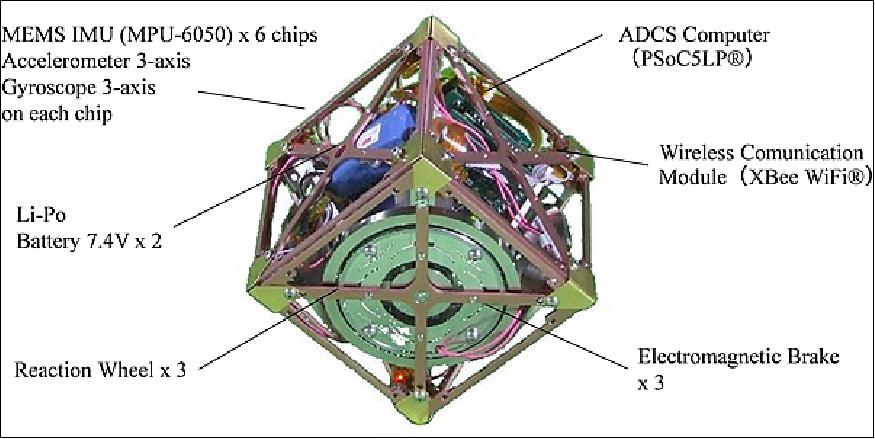
Overview of the Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module:
• The realized body only has a mass of 1.34 kg (including a wireless communicator and a battery), and measures 10 x10 x 10 cm3 in size.
• The control computer, equipped with a system-on-chip (PSoC®), controls and measures at a 50 Hz cycle.
• The module adopts six MEMS (Micro Electro Mechanical System) sensors as the inertial measurement units (IMUs) and three brushless DC motors as the motors.
• Arranging six IMU sensors (each sensor capable of measuring 3-axis rate and acceleration) on the module's vertexes have improved attitude estimation accuracy.
• The 3-axis wheels use brushless DC motors and the hall sensors built into the motors measure wheel rotational speed.
• Each wheel axis is equipped with a newly developed thin electromagnetic brake.
• The electromagnetic brake generates 2.1 Nm of braking torque at excitation and reduces the wheel rotational speed from 6000 rpm to zero within 100 ms, including demagnetization time.
• The module also includes a wireless communicator for receiving telemetry data and transmitting commands, and small lithium polymer battery.
Applications of the Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module:
• 3-axis attitude controller for small satellite
• Exploration rover on microgravity asteroids
• Attitude stabilizer for Drone
• Modular Robots in Multi-agent System
The technology developed for the Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module is fully demonstrated in the module, realizing both minimum mass and size (i.e. approx. 50 g including its guidance control computer, 6-axis inertial sensors, 3-axis wheels 31 mm in angular size). Its micro fan function of translational control can be extensionally equipped.
Mission Status
Space watchers have seen footballs, mini-soccer balls and water balls float through the International Space Station — but never a drone ball. Now, new footage of a spherical Japanese robot shows it hovering and skittering around the Destiny laboratory. 7)
• April 27, 2023: The International Space Station (ISS) partners have agreed to extend the operational period of the ISS. The United States, Japan, Canada and participant European Space Agency (ESA) countries will support operations until 2030, while Russia has committed to continuing station operations until 2028. 9)
• July 14, 2017: Videos show Int-Ball, under the watchful eye of NASA astronaut Peggy Whitson, moving near the walls, taking pictures of experiments and other regions in its vicinity (Figure 8). One shot shows a laptop lazily floating by. In another clip, Peggy Whitson's fellow NASA astronaut Jack Fischer playfully hides behind a camera, taking pictures of the drone (Ref. 2).

• June 9, 2017, Int-Ball was unpacked at "Kibo" on the ISS, with initial checkout being started (Ref.3).
• Int-Ball was delivered to JEM/Kibo ( Japanese Experiment Module on the International Space Station by the US Dragon spacecraft launched on June 4, 2017, and is currently undergoing initial verification. 8)
References
1) "JAXA Plays Ball on the ISS With Int-Ball Drone Camera," Satnews Daily, July 17, 2017, URL:
http://www.satnews.com
/story.php?number=2091569615
2) "First disclosure of images taken by the JEM Kibo's internal drone "Int-Ball"," JAXA, July 14, 2017, URL: http://iss.jaxa.jp/en/kiboexp
/news/170714_int_ball_en.html
3) JEM Internal Ball Camera (Int-Ball)," JAXA, Juzly 14, 2017, URL: http://issstream.tksc.jaxa.jp
/iss2/press/170726_intball_en.pdf
4) Mitani Shigeto,Kanzaw Yamanaka, "Study of Miniaturized Three-axis Attitude Control Module," 59th Space Sciences and Technology Conference,Kagoshima, Japan,October 7-9, 2015
5) Mitani Shigeto, Kanzawa Yamanaka, "High-Agility, Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module," ISTS30 Special Issue, Vol. 14 (2016) No. ists30
6) Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module," JAXA, URL: http://www.kenkai.jaxa.jp/eng
/research/electrical/triaxial.html
7) Elizabeth Howell, "BB-8 Flies? Adorable Japanese Drone Ball Tours Space Station," , July 18, 2017, URL: https://www.space.com/37523-adorable-japanese-
ball-drone-roams-space-station.html
8) "First disclosure of images taken by the Kibo's internal drone "Int-Ball"," JAXA, July 14, 2017, URL: http://iss.jaxa.jp/en/kiboexp
/news/170714_int_ball_en.html
9) Garcia, Mark. “Partners Extend International Space Station for Benefit of Humanity – Space Station.” NASA Blogs, 27 April 2023, https://blogs.nasa.gov/spacestation/2023/04/27/partners-extend-international-space-station-for-benefit-of-humanity/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).