ISS: RRM (Robotic Refueling Mission)
Technology Development
ISS Utilization: RRM (Robotic Refueling Mission)
RRM is a multi-phased ISS investigation, a joint effort of NASA and CSA (Canadian Space Agency) utilizing: SSRMS (Space Station Remote Manipulator System) or Canadarm2 and SPDM (Special Purpose Dexterous Manipulator) or Dextre . The primary goal is to advance robotic servicing technology by demonstrating the use of innovative robotic tools and techniques to remotely manipulate standard satellite interfaces that were not designed to be manipulated robotically. Robotic refueling and servicing could extend a satellite's lifespan, potentially offering satellite owners and operators years of additional service and revenue, more value from the initial satellite investment, and significant savings in delayed replacement costs. Numerous satellites are in orbit today that could benefit from such a service. 1) 2) 3) 4)
In 2009, SSCO (Satellite Servicing Capabilities Office) at NASA/GSFC initiated the development of the RRM program. As an ISS investigation, RRM reduces the risk associated with performing robotic servicing tasks in-orbit and lays the foundation for a future robotic servicing mission to a free-flying satellite. It also advances space robotic capabilities. It is the first NASA technology demonstration to test and prove technology needed to perform robotic refueling and servicing on spacecraft not originally built for them, and the first use of Dextre beyond robotic maintenance of the space station for technology research and development. The prime contractor base consists of Lockheed Martin, Stinger Ghaffarian Technologies, Orbital Sciences Corporation, Alliant Techsystems, Jackson and Tull, and Arctic Slope Regional Corporation. The goal of the RRM program is to give NASA the confidence to robotically refuel, repair and maintain satellites in both near and distant orbits.
The RRM project is being managed and operated by SSPD (Satellite Servicing Projects Division) at NASA/GSFC. SSPD is advancing the state of the art in robotic and human servicing through the management of servicing missions, the execution of targeted technology development campaigns, and the infusion and transfer of servicing capabilities to government and industry stakeholders.
Through their efforts, SSPD is working to: 5)
1) Advance the state of robotic servicing technology to enable the routine servicing of satellites that were not designed with servicing in mind.
2) Position the U.S. to be the global leader in in-space repair, maintenance and satellite disposal.
3) Help to enable a future U.S. industry for the servicing of satellites.
RRM Module in Phase 1
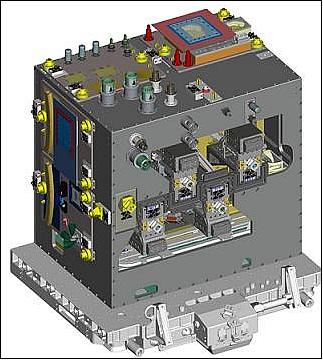
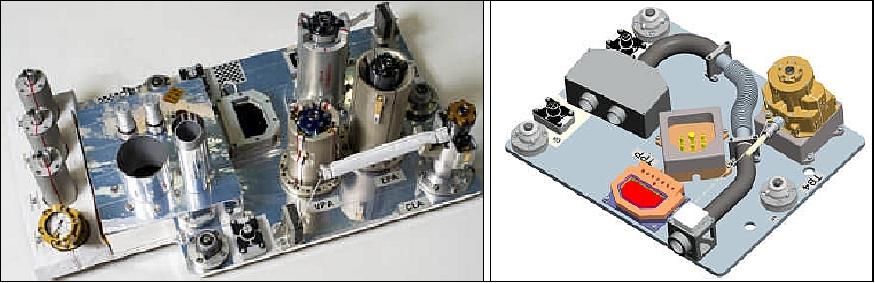
RRM consists of the "RRM module" and four RRM Tools (in the first phase of operations). The International Space Station's twin-armed Canadian Dextre robot acts as a skilled spacecraft refueling and servicing technician of an unprepared client satellite on ISS. The RRM payload consists of a task board that includes worksites hosting representative satellite interfaces for coolant, fuelling, electrical or power, and communications or diagnostics. In order for Dextre to perform the necessary tasks, specialized tools were required to act as interfaces between Dextre's Orbital Replaceable Unit (ORU) Tool Change-Out Mechanisms (OTCMs) and the multiple worksite types integrated into the RRM. The four tools launched inside the RRM payload were designed to interface with Dextre's OTCMs and the hardware they must manipulate.
During operations, controllers on the ground remotely control Dextre to reach into the RRM module and pick up RRM tools. Dextre then goes to work on RRM's components and activity boards, demonstrating such servicing tasks such as cutting and peeling back protective thermal blankets, unscrewing caps, turning valves, and transferring fluid. 6) 7)
RRM represents the first time the space station's Dextre robot was used for technology research and development, moving it beyond robotic maintenance of the orbiting superstructure.
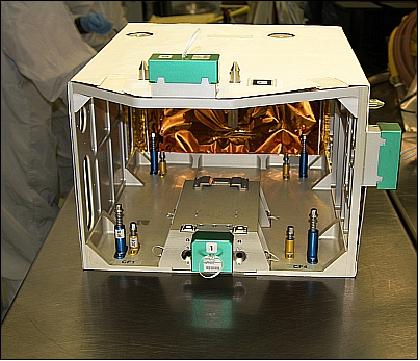
The RRM module is about the size of a washing machine and weighs ~250 kg, with dimensions of 84 cm x 110 cm x 114 cm. RRM includes 1.7 liter of ethanol to demonstrate fluid transfer in orbit. Protective thermal blankets, caps, valves, simulated fuel, and other spacecraft components allow the team to practice a wide range of satellite-servicing tasks.
Launch
RRM was launched on STS-135 ISS ULF7 flight of Atlantis (July 8-21, 2011, 13 day mission), representing the final Shuttle mission. The RRM module, an external ISS experiment, was part of the Raffaello MPLM (Multi-Purpose Logistics Module) payload on STS-135. 8) 9) 10)
• On July 13, 2011, the RRM module on the ISS was temporarily installed on the Dextre robot's Enhanced ORU Temporary Platform. 11)
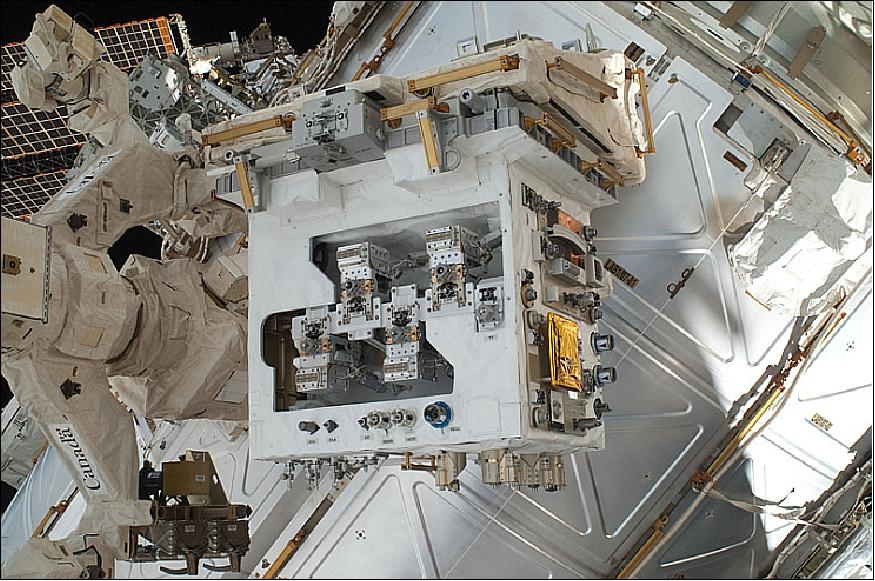
• On Sept. 2, 2011, Canadarm2 and the Dextre robot transferred the RRM to its permanent location on the ELC-4 [(ExPRESS (Expedite the Processing of Experiments to the Space Station) Logistics Carrier-4].
• On Sept. 6. 2011, the RRM module was successfully installed onto its permanent location on the International Space Station's ELC-4.

RRM was launched to the space station with four specialized and unique tools:
- WCT (Wire Cutter Tool)
- MFT (Multifunction Tool)
- SCT (Safety Cap Removal Tool)
- ENT (EVR Nozzle Tool)
The tools are stored in storage bays in RRM module until retrieved by the ISS Dextre Robot. Each tool has integrated cameras for ground operator vision and includes specialized features tailored to complete each unique task.

Phase 1 Tasks
Tasks required to refuel storable propellants in legacy spacecraft:
4) Take apart components (cut wire, manipulate thermal blankets and fasteners, remove caps)
5) Connect refueling hardware and transfer fluid
6) Reseal fuel port
The initial tasks required to replenish cryogens in existing satellites not designed for servicing.
- The first RRM experiment was conducted very successfully on March 7-9, 2012, marking important milestones in satellite-servicing technology and the use of the space station robotic capabilities. During the three-day RRM Gas Fittings Removal task, Dextre performed the most intricate task ever attempted by a space robot: cutting two separate "lock wires" of 0.5 mm in diameter using the RRM WCT (Wire Cutter Tool). Deftly maneuvered by ground-based mission operators and Dextre, the WCT smoothly slid its hook under the individual wires and severed them with only a few mm of clearance. This wire-cutting activity is a prerequisite to removing and servicing various satellite parts during any future in-orbit missions. 13)
- January 2013: The RRM tests from January 14-25 culminated in a first-of-its-kind robotic fluid transfer, a demonstration that could be a catalyst to expanded robotic satellite-servicing capabilities and lead to a greener, more sustainable space. NASA's RRM demonstrated remotely controlled robots using current-day technology could refuel satellites not designed to be serviced. 14)
- May 2013: The latest round of NASA's RRM (Robotic Refueling Mission) satellite-servicing tasks was completed on May 10, 2013. Five days of operations were held aboard the ISS, during which the Canadian-built Dextre robot with RRM tools demonstrated how tiny caps can be retrieved and stowed in space. This task, along with slicing through satellite blanket tape (MLI task) were performed on the RRM module affixed outside the space station. The conclusion of the May operations marked the end of the first phase of tasks (Phase 1) for RRM, a modular activity box with tools that launched to the space station aboard the final space shuttle flight. All objectives of the Phase 1 servicing tasks were successfully conducted, including the first ever in-space robotic refueling operation. 15) 16)
The results of RRM operations show that current-day robotic technology can refuel the common, triple-sealed satellite fuel valves of orbiting satellites (Ref. 14).
Phase 2 Tasks
Launch: The HTV-4 ( H-II Transport Vehicle) of JAXA was launched on August 3, 2013 from TNSC (Tanegashima Space Center) in Japan with the new RRM hardware on board. HTV-4 was installed on its berthing port on the Earth-facing side of the International Space Station's Harmony node on August 9, 2013, delivering a total of ~5400 kg of cargo to the ISS. 17)
The new RRM hardware of the HTV-4 consists of:
• ROTC (RRM On-orbit Transfer Cage) of NASA. ROTC is designed to transfer hardware outside of the space station. Astronauts will mount the ROTC on the sliding table within the Japanese airlock and then install the task board onto the ROTC, giving the Canadian Dextre robot an easy platform from which to retrieve and subsequently install the new hardware. The Phase 2 hardware complement on HTV-4 consists of: 18)
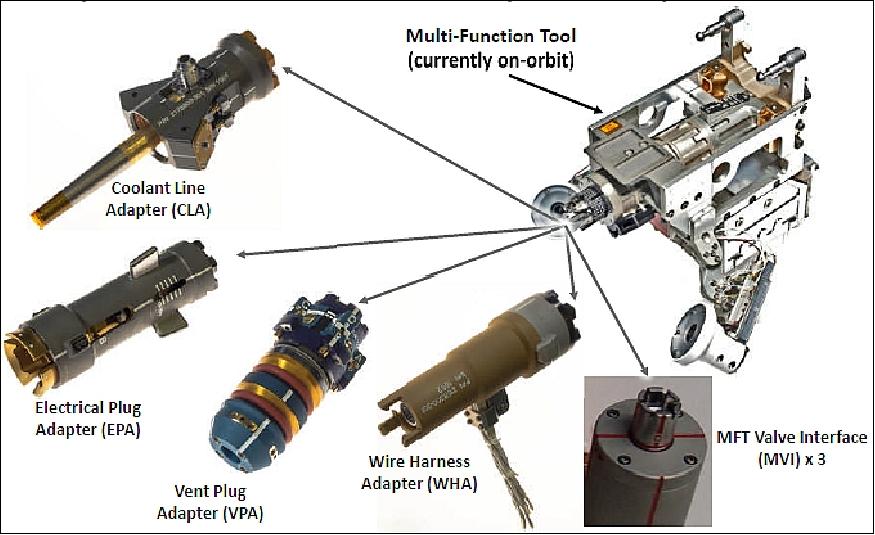
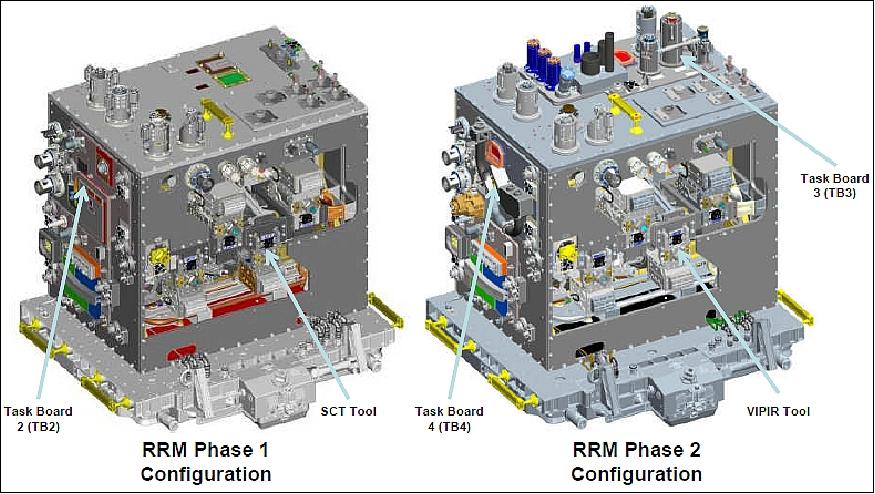
- Two new RRM TBs (Task Boards): TB3 and TB4. TB3 features new hardware to test cryogen replenishment, which includes five brand new adapters for the RRM MFT (Multi Function Tool). TB3 and TB4 will be transferred outside the ISS via a new piece of hardware also launching on HTV-4, called the ROTC (RRM On-orbit Transfer Cage).
- The ROTC (RRM On-orbit Transfer Cage): an original device developed by SSCO (Satellite Servicing Capabilities Office) of NASA/GSFC to transfer hardware outside of the International Space Station.
A further launch in 2014 will deliver the VIPIR (Visual Inspection Poseable Invertebrate Robot) to the ISS for installation. VIPIR , another Phase 2 hardware device, is an SSCO-built borescope inspection tool that provides a set of eyes for internal satellite repair jobs.
Phase 2 of RRM began in August 2013 with the launch of the phase 2 RRM hardware to the ISS aboard the Japanese HTV-4 (H-II Transfer Vehicle 4). In its second phase, RRM is now moving on to demonstrate how a space robot can complete intermediate tasks required to replenish croygen in the instruments of "legacy" satellites: existing, orbiting spacecraft that were not designed to be serviced.
The RRM Phase 2 tasks consist of installing 2 new modular task boards onto the existing RRM experiment that was installed on the ISS ELC-4 (EXPRESS Logistics Carrier-4) in August 2011. The modular task boards are designed to mimic satellite interfaces that can be used in robotic servicing. The demonstrations on the task boards will reduce risks, refine techniques, and increase the reliability and technical proficiency of future robotic servicing missions.
The five RRM tasks consist of: 19)
1) Using existing robotic tools and new unique adapters, mechanically capture, remove, translate and Install a coolant line hose and bayonet into an open service line port
2) Using robotic tools, capture, remove, translate and install a vent plug into an open vent port, verify environment seal
3) Using robotic tools, capture, remove, translate and
- Stow an electrical loop back plug
- Install an electrical plug and check for electrical continuity
4) Using Robotic tools, capture, remove, translate and install an inspection camera onto an open tube. a) Deploy and articulate a stowed flexible inspection camera into the tube.
5) Using robotic tools, capture, remove, translate and install and latch a blind mate SMA plug into a recessed SMA receptacle box and check for electrical continuity.
In 2015, RRM is embarking on a new set of operations that might not be connected with robotic refueling - but have everything to do with extending and enhancing the operational lives of existent and future satellites in orbit. 20)
Building on its team's experience base, RRM is working through an updated to-do list that includes testing a new inspection tool, practicing intermediary steps leading up to coolent replenishment, testing electrical connections for "plug-and-play" space instruments, and working with decals that could help operations guided by machine vision go more smoothly.
• Replenishment Techniques
• Inspection Tool
• Electrical Connections
• Machine Vision Aids
A couple of hosted experiments - including advanced solar cells and special coatings - are also being tested.
• Solar Cell Experiment
• Materials Coatings Experiment
All of these operations are taking place on RRM's home, the International Space Station: the premier test bed for space technologies.
What's the common thread? Servicing capabilities. These new technologies, tools and techniques could eventually give satellite owners resources to diagnose problems on orbit, fix anomalies, and keep certain spacecraft instruments performing longer in space.
Phase 2 of RRM operations began in May 2015 with Dextre, the Canadian Space Agency's two-handed robot, transferring new RRM hardware - two task boards and a multi-purpose inspection tool - to the RRM module.
Demonstrations 21)
1) Replenishment techniques:
Coolant systems are critical to future propulsion and life support systems in space. RRM-2 is demonstrating that with the right set of equipment, a robot can accomplish the tasks leading up to coolant replenishment. After retrofitting valves and creating a pressure-tight seal using hardware on Task Board 3, the RRM and Dextre duo will stop short of actual coolant transfer for this round of tasks.
Why? This transfer is being deferred for a future demonstration, presently in the planning stage. These Phase 2 operations are focusing on the robotic steps leading up to it.
Initial activities to demonstrate this in-orbit capability - cutting wires and removing caps - were completed in March and June 2012 via the original RRM tools and activity boards.

2) Instection Tool:
Having eyes in space is essential. It's even better when you can put them exactly where they need to be. Why? Sometimes, components on spacecraft don't deploy, and you want to know why they failed. A micrometeorite might have made a tiny hole in a space structure, and you want to take a closer look. Or a part might need to be examined inside a satellite.
To make things right, you need a device that is small enough to fit into tight spaces, agile enough to look around corners, and that delivers the type of images that get you the data you need.
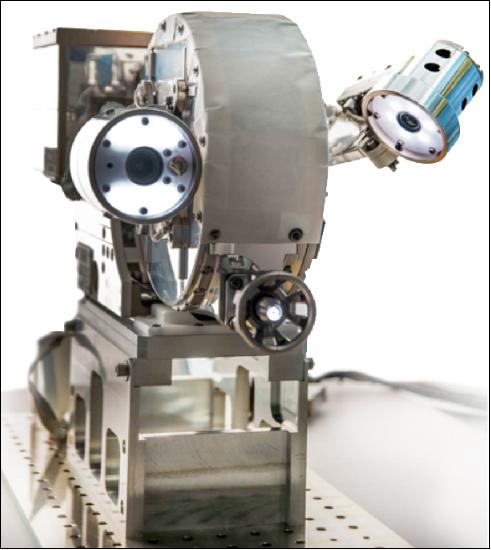
Enter VIPIR (Visual Inspection Poseable Invertebrate Robot): a robotic, multi-capability inspection tool designed to deliver near and midrange inspection capabilities in space.
Held by the Dextre robot, VIPIR tested its cameras' capabilities during May 2015 operations by using its imaging workhorse - the Motorized Zoom Lens - to capture images of satellite parts at various distances on the RRM module. The team also tested the functionality of the VIPIR borescope camera. Collected data will help the team determine what type of camera system and operational techniques would be best suited for different tasks on potential future missions.
3) Electrical Connections:
Satellite servicing can open up possibilities - like being able to swap out "plug and play" instruments on a spacecraft. How do you know if that "plug" made the right connection, though? RRM will test robotic adapters and techniques to mechanically and electrically validate the mate and de-mate capability.
4) Machine Vision Aids:
Visual aids in the form of patterned stickers (SSPD calls them "friendly fiducials") can help robots with machine vision to determine their position and orientation relative to a satellite (or satellite component) in need of repair. This information can be used to aid robot operators when performing servicing tasks as well as certain autonomous operations. During RRM-2 operations, the cameras on the RRM Multifunction Tool and Dextre will image these stickers to gauge their capabilities under various in-orbit lighting conditions.

5) Solar Cell Experiment:
On behalf of a team at NASA/GRC (Glenn Research Center), RRM is hosting a set of quad-junction solar cells to see how they perform in space. Collected data will help the Glenn team understand the cells' efficiency at converting sunlight into electrical power, as well as their ability to withstand the rigorous demands of the space environment.
6) Materials Coating Experiment:
On behalf of a team at NASA/GSFC (Goddard Space Flight Center), RRM is also hosting a set of thermal coating samples to see how they perform within the space environment. Simulating space conditions on the ground is extremely difficult. The International Space Station offers the ideal location to evaluate space materials before they are used on missions.
Testing in 2016 22)
Gas station attendant, electronics installer, home inspector: is there any fix-it job that NASA's RRM (Robotic Refueling Mission) can't tackle during its four-year career? As NASA takes a break in RRM operations, it's looking back on past achievements and celebrating one of its latest accomplishments - the successful inspection of Canadarm2, the ISS robotic arm. In time, this visual inspection capability may help future servicing ventures at other orbits inspect for damage and failures on their spacecraft.
Launched to the space station in 2011, the RRM experiment has long served as a modular, instructive proving ground to try out groundbreaking satellite-servicing tools, technologies and techniques. NASA engineers carefully curate the RRM investigations so that they can identify and mature the critical technologies needed to robotically refuel, diagnose and upgrade satellites – and then prove that these technologies work in orbit.
In October 2015, one of RRM's latest technological debuts, the VIPIR (Visual Inspection Poseable Invertebrate Robot) had an opportunity to move from the training camp of RRM to helping a real client. This is a big moment for the team that developed these technologies, says Benjamin Reed, deputy project manager of NASA's SSCO (Satellite Servicing Capabilities Office). "It's very rare for a demonstration tool to be used as part of day-to-day operations on a real mission," Reed said. "We were thrilled to have this opportunity."
The tool's client was the Canadarm2 space station robotic arm, known as the SSRMS (Space Station Remote Manipulator System ). Since 2003, mission directors have been mystified by an unexplained black mark that appeared next to the "a" in the "Canada" logo that stretches across the robotic workhorse.
"The space station's fixed cameras could only tell us so much," says Ron Ticker, space station manager for development. "We suspected that it may have been a micrometeoroid strike, but without a closer look, we couldn't conclusively determine what had happened to create this marking."
Micrometeoroid and orbital debris, known throughout the space community as MMOD, is a constant threat for orbiting satellites. These tiny natural or manmade items, shooting through the space environment at speeds that can exceed 20,000 mph, can damage spacecraft, puncture instruments and disrupt operations.
The ISS office found its answer in VIPIR (Figure 10), a multi-camera inspection tool that the SSCO had built and then tested as part of the RRM program in May 2015. Its zoom lens provided the perfect avenue for a closer look at the mysterious black mark. On Oct. 9, 2015, robotic operators at NASA/JSC ( Johnson Space Center) in Houston commanded the Canadian Space Agency's Dextre – a twin-armed robot attached to the SSRMS – to maneuver VIPIR into position for an inspection.
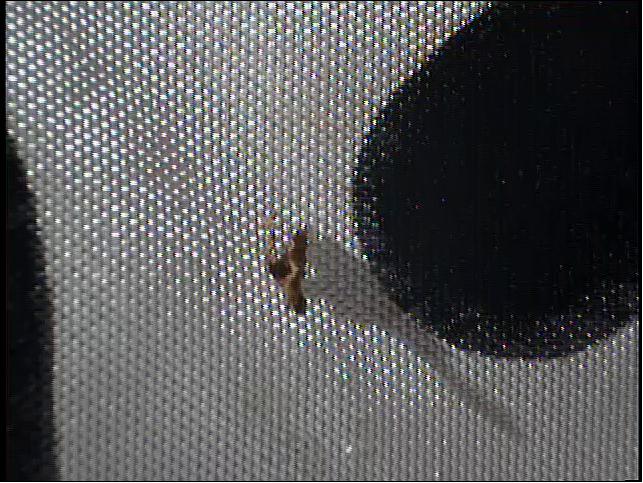
"The results from VIPIR were phenomenal," said Ticker. "From a distance of approximately 20 cm, VIPIR was able to resolve details as small as 0.076 mm — about ten times thinner than the thickness of a credit card. From VIPIR's footage, we were able to discern that the black mark was in fact a raised mass at the inspection site."
The resolution from VIPIR is so clear and focused, that a viewer can count the individual fiber weaves of the thermal blanket material. Michael Rollins, Image Analyst with the Image Science and Analysis Group at Johnson, explained that if VIPIR had been positioned even closer to the robot arm, it would have been capable of even higher resolution of the worksite. However, space station proximity rules for robotic operations kept VIPIR farther back from the arm – a position that likely resulted in better lighting for the inspection.
The RRM team kept VIPIR's camera trained on the area for more than two hours so they could take footage in both glaring sunlight, and during orbit night under the glow of the softer LED lights incorporated into the VIPIR tool itself.
"We were fascinated by the difference in the imagery under the dynamic lighting conditions found in LEO," said Ross Henry, the Vision Lead for VIPIR. "During the majority of the inspection, the imagery looked relatively the same with a limited amount of detail visible. However, at one point the sun illuminated the inspection site from the side (at an oblique angle), and the imagery changed completely. A shadow that was cast showed clearly the raised mass at the inspection site. This exercise helped us learn even more about what VIPIR can observe in orbit."
The Image Science and Analysis Group is now analyzing the results from VIPIR's inspection to determine the cause. Initial finds from a 3D analytical tool confirm the slightly elevated structure for most of the anomaly. Further work is planned to try to characterize internal detail within the raised mass. In the meantime, the RRM team is celebrating the other successful work they completed this fall.
As part of the October RRM operations, NASA also tested a new collection of satellite-servicing technologies and techniques. SSCO's to-do list included practicing techniques leading up to coolant replenishment, testing electrical connection for "plug and play" space instruments, and working with decals that could help operations guided by machine vision go more smoothly. All RRM activities were declared a success.
During the week of Jan. 4, 2016, the team completed the last scientific objective on the RRM checklist: exposing a special set of solar cells to the sunlight to assess their performance. The RRM project is hosting this experiment in collaboration with NASA's Glenn Research Center in Cleveland. On Jan. 8, the RRM task board holding this investigation entered the space station through the JEM (Japanese Experiment Module) airlock, where it was retrieved by the astronaut crew on Jan. 22, 2016. With that step done, the RRM investigation in its current form is now complete.
At a to-be-determined time, the original RRM module will be loaded onto a return vehicle from the ISS to be burned up during atmospheric re-entry. It is a bittersweet thought for the team, but they are satisfied with the work that they have accomplished. Already, they are looking forward to their next big projects on the space station.
Plans are well underway for RRM3, a new, separate module with experiments to demonstrate tools, technologies and techniques for cryogen replenishment and xenon recharge. These technologies are an important part of maintaining in-space capabilities that will take crew and cargo on the journey to Mars, said Ticker.
End of Mission and Reentry
• On March 19, 2017, the SpaceX CRS-10 Dragon cargo ship departed from the ISS with numerous items for return and disposal, among them MISSE and RRM (Robotic Refueling Mission) payloads. MISSE and RRM were in the trunk of Dragon to be destroyed when the trunk separated during Dragon's return to Earth. About 2500 kg of NASA cargo and science and technology demonstration samples (return items) were also installed into the pressurized section of Dragon, including a long list of experiments to be removed from Dragon once she is back on Earth. — At the required velocity and altitude, Dragon's drogue parachutes were deployed, followed by Dragon's main parachutes, easing the vehicle to a splashdown in the Pacific Ocean off the coast of California. Dragon was transported to the port of Los Angeles, prior to a trip to Texas for cargo removal. 23) 24)
- The MISSE and RRM payloads were installed on ELC-1 (ExPRESS Logistics Carrier-1). They had to be removed for the new payloads (STP-H5 equipmment) which were flown to the ISS by the SpaceX CRS-10 Dragon cargo mission, launched on Feb. 19, 2017.
References
1) Jill McGuire, "NASA's Robotic Refueling Mission," 2nd Annual ISS Research and Development Conference, Denver, CO, USA, July 16-18, 2013, URL: http://www.astronautical.org/sites/default/files/issrdc/2013/issrdc_2013-07-17-1600_mcguire.pdf
2) "Robotic Refueling Mission," NASA; URL: http://ssco.gsfc.nasa.gov/images/RRM_Factsheet.pdf
3) Frank Cepollina, "Satellite Servicing and The Spirit of Innovation," NASA, June 29, 2012, URL: http://www.goddard-contractors-association.org/presentations
/GCA%20Satellite%20Servicing-Ceppi%202012June29.pdf
4) M. Caron, I. Mills, "Planning and Execution of Tele-Robotic Maintenance Operations on the ISS," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org
/proceedings/documents/id1272635-Paper-001.pdf
5) https://sspd.gsfc.nasa.gov/about.html
6) RRM (Robotic Refueling Mission)," NASA, August 10, 2013, URL: http://ssco.gsfc.nasa.gov/robotic_refueling_mission.html
7) Teri H. Gregory, Miles Newman, "Thermal Design Considerations of the Robotic Refueling Mission (RRM)," 41st International Conference on Environmental Systems, Portland, OR, USA, July 17-21, 2011, paper: AIAA 2011-5072
8) "STS-135 Press Kit: The Final Mission," NASA, July 2011, URL: http://www.nasa.gov/pdf/566071main_STS-135_Press_Kit.pdf
9) Ken Kremer, "Revolutionary Robotic Refueling Experiment Opens New Research Avenues at Space Station," Universe Today, July 16, 2011, URL: http://www.universetoday.com/87419
/revolutionary-robotic-refueling-experiment-opens-new-research-avenues-at-space-station/
10) Jeff Foust, "The mission of the final shuttle mission," The Space Review," July 5, 2011, URL: http://www.thespacereview.com/article/1876/1
11) "Robotic Refueling Mission : Image Gallery," NASA, URL: http://ssco.gsfc.nasa.gov/rrm-gallery.html
12) "Robotic Refueling Module, Soon To Be Relocated to Permanent Space Station Position," NASA, August 16, 2011, URL: http://www.nasa.gov/topics/shuttle_station/features/rrm-issposition.html
13) "RRM Task : Gas Fittings Removal Task, Part I," NASA Press Release, March 13, 2012, URL: http://ssco.gsfc.nasa.gov/rrm_gfr-task.html
14) "NASA's Successful Robotic Refueling Demo Points To a Bright Satellite-Servicing Future," NASA, February 8, 2013, URL: http://www.nasa.gov/mission_pages/station/research/news/rrm_success.html
15) Adrienne Alessandro, "NASA's Robotic Refueling Mission Practices New Satellite-Servicing Tasks,", NASA May 10, 2013, URL: http://www.nasa.gov/mission_pages/station/research/news/rrm_practice.html
16) Patric Blau, "Robotic Refueling Mission completes Phase I of Demonstrations," Spaceflight 101, May 10, 2013, URL: http://www.spaceflight101.com/robotic-refueling-mission.html
17) "Japanese Cargo Craft Captured, Berthed to Station," NASA, Aug. 9, 2013, URL: http://www.nasa.gov/content/station-crew-captures-japanese-cargo-craft/#.UgY3fazODWI
18) "It may be called the Robotic Refueling Mission (RRM), but NASA built RRM to demonstrate much more than just robotic satellite refueling," NASA, Aug. 10, 2013, URL: http://ssco.gsfc.nasa.gov/rrm_phase2.html
19) "Robotic Refueling Mission Phase 2 (RRM-P2)," NASA Fact sheet, May 28, 2013, URL: http://www.nasa.gov/mission_pages/station/research/experiments/946.html
20) "The Robotic Refueling Mission Tackles New Frontiers," NASA, URL: https://sspd.gsfc.nasa.gov/rrm_phase2.html#replenishment
21) "NASA Robotic Servicing Demonstrations Continue Onboard the Space Station," NASA, July 20, 2015, URL: https://www.nasa.gov/feature/goddard
/nasa-robotic-servicing-demonstrations-continue-onboard-the-space-station
22) Adrienne Alessandro, "New Tool Provides Successful Visual Inspection of Space Station Robot Arm," NASA, Feb. 1, 2016, URL: https://www.nasa.gov/mission_pages/station/research/VIPR
23) Chris Bergin, "CRS-10 Dragon completes homecoming to conclude successful ISS mission," NASA Spaceflight.com, March 19, 2017, URL:
https://www.nasaspaceflight.com/2017/03/crs-10-dragon-returning-home-iss-mission/
24) "Dragon Splashes Down in Pacific Ocean," NASA blog, March 19, 2017, URL: https://blogs.nasa.gov/spacestation/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).