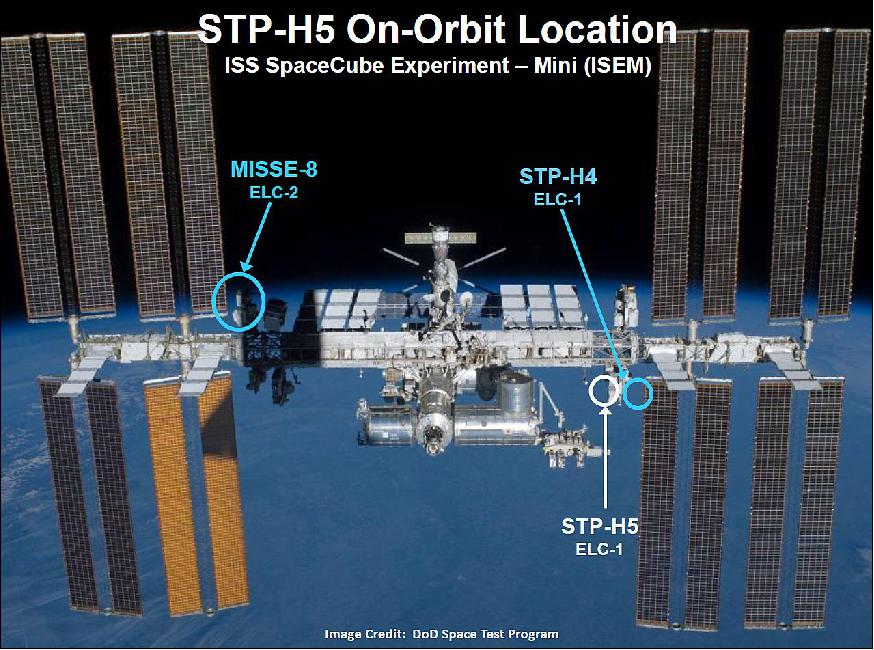
ISS: STP-H5
Technology Development
ISS Utilization: STP-H5 (Space Test Program-Houston 5), LIS, ISEM, Raven, RHEME, CHREC, SHM, FPS
The DoD STP (Space Test Program) supports the development, evaluation, and advancement of new technologies needed for the future of spaceflight. STP-Houston provides opportunities for DoD and civilian space agencies to perform on-orbit research and technology demonstrations from the International Space Station (ISS). The STP-H5/ISEM (STP-Houston 5, ISS SpaceCube Experiment Mini) payload is scheduled for launch on the upcoming SpaceX CRS- 10 mission and will feature new technologies, including a hybrid space computer developed by the NSF CHREC Center, working closely with the NASA SpaceCube Team, known as the CSP (CHREC Space Processor). 1) 2) 3)
Validation of new-processing technology is one of the most crucial challenges to the future generation of space missions. Spacecraft technology has developed by stressing the importance of creating highly reliable and more affordable space systems. Prohibitive launch costs and increasing demands for higher-computational performance have promoted a rising trend towards development of smaller CubeSats featuring commercial technology on higher-risk missions and less-stringent standards. Allowed by these advancements, it is now possible for a group of small satellites to perform the same mission tasks that would have required a costly, massively sized satellite in the past.
Earth science needs more data to sustain more powerful climate and weather models. The solution to the decrease in Earth-observing missions is to develop more small satellites, with high-processing capability. One major concern is with next-generation instruments that are capable of generating immense amount of data, a satellite may saturate its downlink bandwidth, therefore, to alleviate this issue, many of the algorithms can be performed with on-board processing so that only results need to be transmitted.
The STP-H5/ISEM mission will provide validation for the new hybrid-processing technology and experimental research studied by the NSF (National Science Foundation) CHREC (Center for High-Performance and Reconfigurable Computing). The results of this mission will prove the technology is ready for future small-satellite missions to help solve the issues presented in the decadal survey. The ISEM-CSP flight box, along with the rest of the STP-H5 pallet, will be attached to theISS ( International Space Station), which provides a stable, long-lasting mission platform. Once the STP-H5 mission is launched and integrated onto theELC ( Express Logics Carrier) aboard the ISS, the CSP flight unit will be a continuous development platform for software testing, because new applications, design cores, and upgrades can be uploaded and tested on board. This mission is a first step for the demonstration of the technology and will prove that the CSPv1 space computer will support both high performance and high reliability for future small-satellite missions.
Background
The launch opportunity is provided by the Space Test Program Houston office and the CSP flight box has been included on the ISEM experiment stack as a secondary science and technology payload.
The Space Test Program Houston office is the sole interface to NASA for all DoD payloads on the ISS, and other human-rated launch vehicles, both domestic and international. The office's main goal is to provide timely spaceflight, assure the payload is ready for flight, and to provide management and technical support for the safety and integration processes.
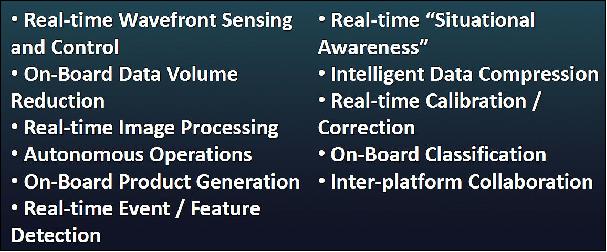
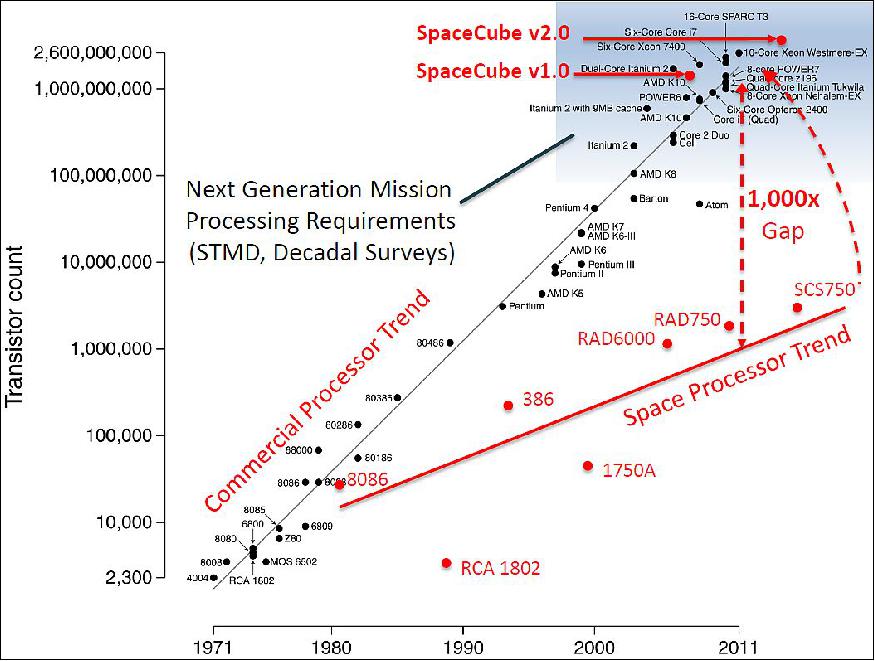
The Challenge: The next generation of NASA science missions will require "order of magnitude" improvements in on-board computing power. 4)
Approach
• The traditional path of developing radiation hardened flight processor will not work ....they are always one or two generations behind
• Science data does not need to be 100% perfect, 100% of the time ..... occasional "blips" are OK, especially if you can collect 100 x MORE DATA using "radiation tolerant" processing components. Note: Radiation tolerant –susceptible to radiation induced upsets (bit flips) but not radiation induced destructive failures (latch-up)
• Accept that radiation induced upsets will happen occasionally .... and just deal with them
• Target 10 x to 100 x improvement in "MIPS/watt"
Solution
• Hybrid processing: CPU, DSP and FPGA logic
• Integrated "radiation upset mitigation" techniques
• SpaceCube"core software" infrastructure
• Small "critical function" manager/watchdog
• Standard interfaces
Note: SpaceCube 2.0 and SpaceCube Mini can be populated with either commercial Virtex5 FX130T parts or radiation hardened Virtex5 QV parts .... offering system developers the option of trading computing performance for radiation performance

Processor | MIPS | Power | MIPS/W |
MIL-STD-1750A | 3 | 15 W | 0.2 |
RAD6000 | 35 | 15 W | 2.33 |
RAD750 | 300 | 15 W | 20 |
LEON 3FT | 75 | 5 W | 15 |
LEON3FT Dual-Core | 250 | 10 W | 25 |
BRE440 (PPC) | 230 | 5 W | 46 |
Maxwell SCS750 | 1200 | 25 W | 48 |
SpaceCube 1.0 | 3000 | 7.5 W | 400 |
SpaceCube 2.0 | 6000 | 10 W | 600 |
SpaceCube Mini | 3000 | 5 W | 600 |
Launch
The STP-H5 payload package, as part of the CRS-10 (Cargo Resupply-10) mission, was launched on February 19, 2017 on the SpaceX Falcon 9 v1.1 FT vehicle and the Dragon spacecraft. The launch site was NASA's Kennedy Space Center, Cape Canaveral SLC-40, FL. 5) 6) 7)
Orbit: Near circular orbit, altitude of ~400 km, inclination = 51.6º.
Further payloads on this flight are:
• SAGE-III (Stratospheric Aerosol and Gas Experiment-III) of NASA/LaRC
• LIS (Lightning Imaging Sensor) of NASA/MSFC. LIS and ISEM are part of thirteen instruments on the STP-H5 payload manifest. LIS and SAGE-III are described in separate files on the eoPortal.
STP-H5 Payloads
Overview of the STP-H5 Payload Package
• LIS (Lightning Imaging Sensor) to measure the frequency and energy of lighting strikes around the world to provide data valuable for weather prediction, climate research, atmospheric chemistry / physics and flight safety for air- and spacecraft.
• ISEM (ISS SpaceCube Experiment Mini) to provide validation for hybrid-processing technology to advance that technology's mission readiness level for future application on small satellites with limited volume for computer equipment.
• Raven, an advanced real-time spacecraft navigation system possessing state of the art sensors and the intelligence needed to autonomously acquire a target and steer toward it in a safe fashion.
• RHEME (Radiation Hardened Electronic Memory Experiment) deploys a study of how frequently electronic memory experiences a glitch after being struck by high-energy particles in space. It consists two types of SRAM (static random access memory) devices – four 16 Mbit devices and a 72Mbit device comprising four 18Mbit slices, both types were designed by Silicon Space Technology, Inc. for space applications.
• CHREC (Center for High-performance REconfigurable Computing). The CSP (CHREC Space Processor) investigation studies a miniature space computer for use on CubeSats, SmallSats and other small spacecraft systems. It is designed to tolerate space radiation, which can damage computer systems, and to minimize energy use and cost.
• SHM (Structural Health Monitoring) experiment collects data on how fasteners, different glues and mechanical parts fare in an operational spaceflight environment from the assembly, testing and arrival in orbit through two to four years of exposure to the challenging space environment.
• FPS (Fabry Perot Spectrometer) for Methane, to demonstrate a small, low-cost sensor for the measurement of atmospheric methane, a primary driver of the greenhouse effect. Understanding the sources of natural and human-caused methane is an important aspect of climate research and miniaturization of a precise methane sensor could permit a number of observatories to be deployed at low-cost to monitor global methane variation and quantify the release of methane from thawing permafrost.
• EHD (Electro-Hydro Dynamics) to demonstrate a fluid pump driven by electric fields, eliminating fragile, failure-prone mechanical components and reducing mass.
• LITES (Limb-Imaging Ionospheric and Thermospheric Extreme-Ultraviolet Spectrograph) is an instrument dedicated to studying Earth's ionosphere, a highly complex and dynamic region of the upper atmosphere in which charged particles from the sun form plasmas and airglow, responsible for space weather phenomena that can affect the operation of satellites and radio communications.
• iMESA-R (Integrated Miniaturized Electrostatic Analyzer Reflight) is the reflight mission of the Space Test Program-integrated Miniaturized Electrostatic Analyzer – a space weather system comprising four low-cost instruments to measure plasma densities and energies to improve forecast models for the ionosphere and spacecraft charging effects.
• APS (Automated Plume Sentry) examines how thrusters on spacecraft in close proximity to the Space Station interact with the complex and whether they can contaminate experiments installed on the Station's exterior.
• GROUP-C (GPS Radio Occultation and Ultraviolet Photometry Co-located) is a space weather payload operated in close conjunction with LITES to form a UV and Radio Ionospheric Observation suite operated from the International Space Station. It uses two sensors to measure Earth's ionosphere, the uppermost region of the atmosphere. The sensors measure horizontal and vertical ion and electron density in the ionosphere, studying the ionosphere's structure and variability.
• ICE (Innovative Coatings Experiment), a space exposure study that examines the degradation experienced by a variety of materials over a two-year space mission. It is a well known fact that the harsh radiation and extreme temperatures experienced in Low Earth Orbit can corrode the paint and coatings of spacecraft and cause optical components to degrade over time.
The latest launch for STP (Space Test Program) is STP-H5, which will feature several payload experiments, ISEM-CSP included. STP-H5 is expected to launch in 2016. The entire mission pallet is featured in Figure 8.
STP-H5: ISEM (ISS SpaceCube Experiment Mini)
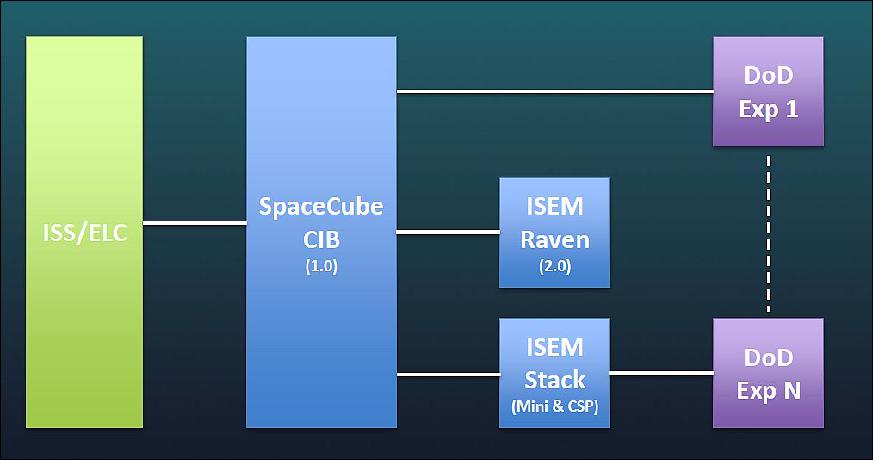
The NASA/GSFC Science Data Processing Branch and SpaceCube Team have included the ISEM-CSP flight box as a secondary module in the SpaceCube Mini Experiment on STP-H5. The NASA Goddard SpaceCube team is at the forefront of advanced-avionics solutions for space missions. Their primary goal is to enable new classes of future missions by developing new technology for small-spacecraft architectures, mission concepts, component-subsystem hardware, and deployment methods.
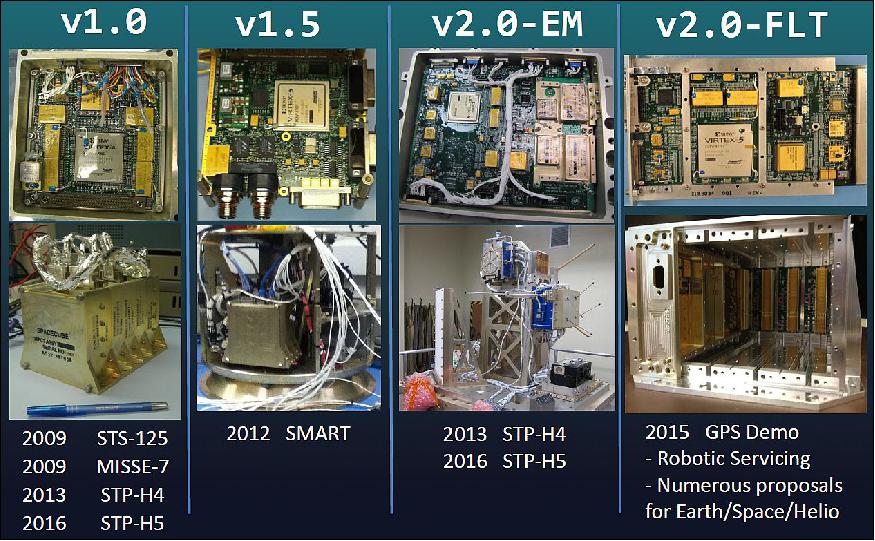
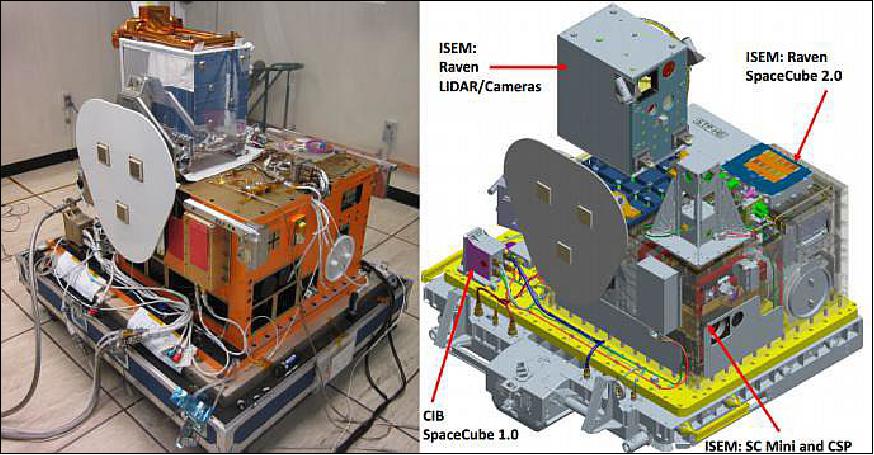
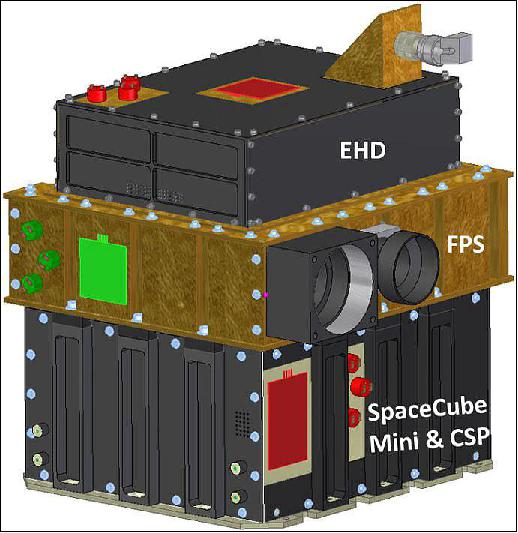
One of the most recognizable contributions that the branch has made to space development is the successful design and launch of SpaceCube, a family of high-performance reconfigurable systems, which has also inspired several design aspects of the CSPv1. SpaceCube has been featured as the prominent technology on several missions including the Hubble Servicing Mission 4, MISSE-7, STP-H4, and STP-H5/RAVEN, with more scheduled. The ISEM experiment on STP-H5 focuses on SpaceCube Mini, which serves as primary communication bus for some of the DoD payloads as well as the CSP (CHREC Space Processor). The SpaceCube Mini was designed as a near functional equivalent to the SpaceCube 2.0, but in a 1U CubeSat form factor. The STP-H5 mission is the first flight of the SpaceCube Mini and serves to increase the TRL (Technology Readiness Level) of the design. The ISEM Experiment Stack is depicted in Figure 9, and also displays the EHD (Electro-Hydro Dynamic) thermal fluid pump experiment, and the FPS (Fabry-Perot Spectrometer) for atmospheric methane. Lastly, ISEM also includes the ICE (Innovative Coatings Experiment), ICE not pictured, that intends to evaluate next-generation thermal coatings. 8) 9)
CSP (CHREC Space Processor): The CSP system is a multifaceted, hybrid space computer developed by researchers in CHREC at the University of Florida and Brigham Young University in Provo, Utah, working closely with NASA/GSFC. An overviewis given of the concept behind CSP as well as a discussion of features of the first flight model, CSPv1, and its fault-tolerant capabilities.
CSP concept: CSP is a concept for a multifaceted, hybrid processing system. This concept centers on having both a hybrid-processor and hybrid-system architecture. The hybrid processor of the CSP is the Xilinx Zynq SoC (System on Chip ). Having a processor device with mixed technology can provide immense computational benefits depending on an algorithm's structure. For example, with a mixed FPGA+CPU combination, a parallel algorithm can be hardware-accelerated on the FPGA fabric, while control-flow operations can be performed on the CPU cores. An SoC allows the users to optimize an algorithm to the specialized resources of the device.
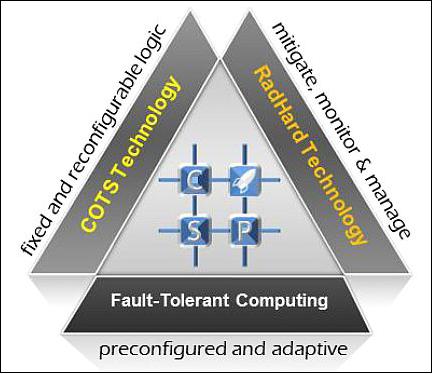
The CSP concept also features a hybrid-system architecture, which is a combination of three themes: COTS (Commercial-off-the-Shelf) devices; radiation-hardened devices; and fault-tolerant computing strategies. Commercial devices have the energy and performance benefits of the latest technology but are susceptible to radiation in space, whereas radiation-hardened devices are relatively immune to radiation but are more expensive, larger, and outdated in both speed and functionality. The keystone principle of the CSP concept is to have a device with commercial technology featured, for the best in high performance and energy efficiency, but supported by radiation-hardened devices monitoring and managing the COTS devices, and further augmented by fault-tolerant computing strategies. This concept is illustrated in Figure 10.
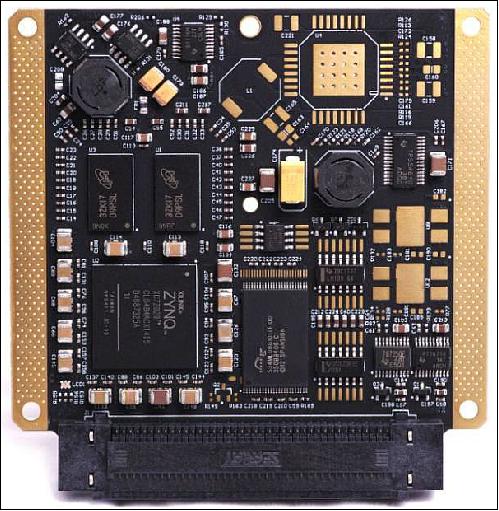
CSPv1 Components and Features: CSPv1 is the first flight board evolved from the CSP concept and features a hybrid-processor and hybrid- system architecture. The processor architecture features fixed (dual ARM Cortex-A9/NEON cores) and reconfigurable (28 nm Artix-7 FPGA fabric) logic on the Xilinx Zynq-7020 device. The system architecture combines commercial and radiation-hardened electronics with techniques in fault-tolerant computing to achieve a system with a powerful combination of high speed and reliability with low power, size, mass, and cost.
The CSPv1 is designed to fit a 1U CubeSat form factor (10 cm x 10 cm). The design uniquely supports the ability to selectively populate several components with a radiation-hardened or commercial version on the same PCB (Printed Circuit Board) design. This feature provides a spectrum of combinations to scale cost and reliability for different requirements. Figure 11 shows a populated board using all-COTS components, where the unpopulated regions are for the placement of equivalent radiation-hardened components.
All external connections to the CSPv1 board are made through a 160-pin Samtec Searay connector. There are 60 high-speed connections from the FPGA portion of the Zynq, where 48 pins can be configured as 24 differential pairs for high-speed interfaces. There are also 26 high-speed connections from the ARM portion of the Zynq that can be configured in a combination of varying communication interfaces including UART and I2C.
The major subsystems of CSPv1 include the Xilinx Zynq, 512 MB of DDR3 memory (supporting up to 1 GB), NAND flash memory (1-4 GB), watchdog controller, reset circuit, and power circuit. These units are supported by a lightweight Linux kernel, named Wumbo, and a variety of software and hardware services.
CSPv1 Fault Tolerance: The CSPv1 hardware architecture was designed to support multiple levels of fault tolerance. The components used in each subsystem were selected to perform in harsh environments. If any major subsystem of the CSPv1 fails, the CSPv1 would become unusable, therefore, most of the subsystems either contain the inherent ability to recover from radiation effects or else have a radiation-hardened variant that can be populated on the board.
The Zynq has three internal watchdogs which can be used to detect and correct system faults. Additionally, an external supervisor circuit with hardware watchdog was integrated into the CSPv1 to monitor the processing device for radiation upsets that the processor is not able to mitigate internally.
The ARM side of the Zynq is connected to the non-volatile memory and is responsible for configuring the system, including the FPGA, on boot. As a precaution, for the critical booting process, CSPv1 repurposes built-in RSA authentication features of the Zynq to check boot images before startup. As an additional safety measure, multiple boot images can be stored in the non-volatile memory to be used as a fallback.
Once the boot image is verified and the device is booted, the CSPv1 runs a custom, lightweight Linux-based operating system (Wumbo). The Linux kernel represents a large portion of the software running on CSPv1. Optional improvements and modifications to the Linux kernel can be made to increase fault tolerance including: disabling the caches, enabling ECC (Error Correcting Code) on the DRAM (Dynamic Random Access Memory), and reporting parity faults on the caches if enabled. Fault detection within the kernel is also improved with the addition of rebooting on kernel panics, soft and hard lockup detection, and the EDAC (Error Detection and Correction) module. Together, these improvements provide higher reliability, longer average system up-time, and more detailed system reports on upset events.
One of the main challenges for incorporating an FPGA device in a spacecraft system stems from the SRAM-based memory architecture, which makes it susceptible to SEEs (Single-Event Effects). These events, which are a common occurrence in a harsh-radiation environment, can manifest as bit flips in configuration or data memory, which can eventually lead to device failure. One solution to these issues is a technique known as configuration scrubbing, the process of quickly repairing these configuration-bit upsets in the FPGA before they accumulate and lead to a failure. CSPv1 features a readback scrubber with a variable scrub rate and detailed error messages. This scrubber periodically reads back the entire configuration memory and performs writes to configuration frames that correct configuration memory without disturbing other dynamic portions of memory. A new and more efficient hybrid scrubber that takes advantage of both built-in, single-bit correction and ECC will be integrated into CSPv1 in the coming months. This improved scrubber will reduce overhead significantly and improve error-correction latency.
Environmental Testing
The CSP flight box on STP-H5 has undergone environmental testing with the rest of ISEM and will undergo additional testing during full integration of the STP-H5 pallet. Moreover, the CSPv1 board has undergone radiation testing at two different testing facilities.
Thermal, Vacuum, & Vibration Tests: Prior to delivery for integration with the full STP-H5 payload, ISEM was required to undergo a workmanship level Random Vibration Test and a Thermal Cycle Test. The Random Vibration Test is performed to identify latent defects and manufacturing flaws in electrical, electronic, and electromechanical hardware at the component level. The Thermal Cycle Test is performed to confirm expected performance of a device in a temperature range enveloping mission conditions. The minimum workmanship Random Vibration Test levels are listed in Table 2.
20 Hz | @ 0.01 g2/Hz |
20 to 80 Hz | @ +3dB/oct |
80 to 500 Hz | @ 0.04 g2/Hz |
500 to 2000 Hz | @ -3dB/oct |
2000 Hz | @ 0.01 g2/Hz |
Overall Level | = 6.8 grms |
The Random Vibration Test was performed unpowered, with a sine sweep prior to and after each axis. The results of a sine sweep are compared before and after the Random Vibration Test to verify there were no changes in frequencies. Any major changes would indicate an alteration in the structure and would need to be investigated. The workmanship vibration test of the ISEM assembly was performed successfully on all three axes, with no significant changes detected during the sine sweeps.
The ISEM assembly also underwent a full TVAC (Thermal Vacuum) Test, even though only a Thermal Cycle Test was required under the mission specification. A temperature profile range is selected based on the limits of the components involved and the expected temperatures on orbit, to expose the assembly to the maximum operational flexibility expected. The general profile consisted of two cycles in vacuum with a hot operational plateau of 50°C and a cold operational plateau of -10°C, at the ISEM baseplate interface. A full-functional performance test was performed at each plateau, with nominal on-orbit activities occurring during the temperature transitions. The test was performed using minimum and maximum input voltage at various stages in order to capture corner cases, as the specified input voltage could be subtly different based on power converter performance and signal integrity. The CSP performed nominally throughout the TVAC test, which indicates it is ready for mission exposure.
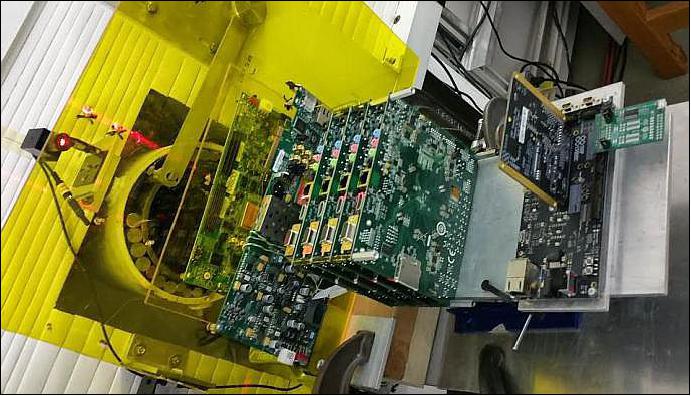
Radiation Tests: CSP was also tested against neutron radiation. High-energy neutron testing provides an estimation of system reliability in radiation-rich environments. The CSPv1 flight board was tested under a narrow beam for several days at the Los Alamos Neutron Science Center (LANSCE) in December of 2014 (Figure 12). The recorded logs revealed the radiation-hardened watchdog timer rebooting the board and the EDAC Linux kernel module reporting ECC errors on the DRAM and parity errors in the L2 cache. Hundreds of errors reported by Linux kernel were logged over the serial terminal and analyzed later in the lab. Analysis of those logs indicated that about 75% of the reboots originated in L2 cache events, and it is suspected that a majority of the remaining events were caused by the L1 cache, which were not being reported at the time.

Another neutron-beam test was performed in May 2015 at the TRIUMF facility in Vancouver for both the all-COTS CSPv1 board and a number of Zynq-based development boards in testing the cross-section for the caches and on-chip memory (Figure 7). Later analysis of the logs showed that the FPGA configuration-memory readback scrubber reported many single- and multi-bit upsets on the all-COTS CSPv1 board. Due to differences between the flight and COTS boards, we saw an increase in the frequency of having to manually power-cycle the COTS board in the beam. The cache and on-chip memory cross-section tests are currently under analysis, but show that the no-caches configuration makes a good case for improved reliability, although at the cost of performance.

ISEM Mission Configuration
Hardware Configuration: The STP-H5 ISEM-CSP (CHREC Space flight box (Figure 15) is able to fit four boards in a 1U form-factor: two hybrid flight CSPv1 boards (CSP0, CSP1); one Power/Interface board; and one custom Backplane interconnect board. The two CSPv1 boards are set up in a master-slave configuration where CSP0 receives all ground commands and forwards requests to CSP1 as necessary. Due to the configuration, all ingoing and outgoing communication is directed by CSP0 through the Power/Interface board. The Backplane board is the central interconnect interface, connecting CSP0, CSP1, and the Power/Interface board together. Two SpaceWire and UART interfaces can be used to pass data between CSP0 and CSP1.

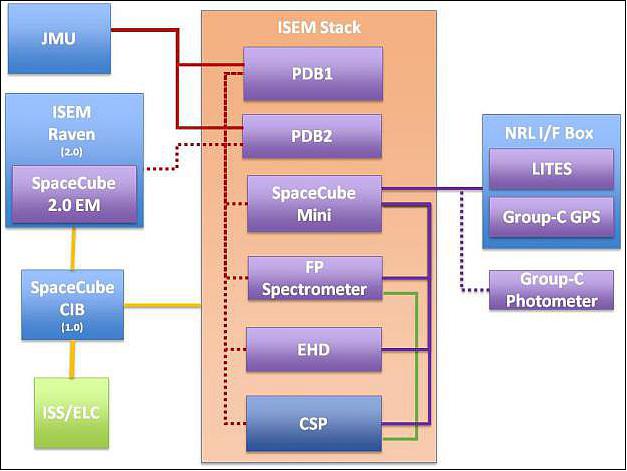
Four external connectors are provided on the CSP flight box: Camera Link; SpaceWire; power in; and debug I/O. These connections are made directly through the Power/Interface board, which functions as the system power supply as well as the CSP flight-box interface. The power-supply circuitry is hardened and provides the power rails necessary for the box to operate. External to the CSP flight box, a Sony 5 Mpixel color camera is interfaced using a Camera Link FPGA core. Additionally, CSP0 contains a SpaceWire FPGA core to provide a communication interface to the SpaceCube Mini and ISS. A general connection overview for the ISEM stack is depicted in Figure 16.
Software Configuration: The CSPv1s in the flight box also have a software configuration unique to the STP-H5 mission. Both CSPv1 flight boards are configured to boot from the on-board NAND flash. The Zynq's non-secure fallback feature is used to provide reliable booting. Four "golden" images are stored at the beginning of the flash. If the first image is corrupted in flight, then the Zynq BootROM loads the next image, and continues loading images until it finds a valid one. These images are in a read-only partition of the flash. The next partition contains space for updated boot images, which can be loaded post-launch. In each boot image, there is a First Stage Boot Loader, Second Stage Boot Loader (U-Boot), FPGA bitstream, and Wumbo Linux kernel. The Linux image uses an initramfs once booted and a non-volatile JFFS2 flash filesystem is also mounted.
Contained in the Wumbo image is GSFC's cFE (Core Flight Executive) along with several key CFS (Core Flight System) applications. cFE along with the OSAL (Operating System Abstraction Layer) are open source and can be found on SourceForge. cFE is NASA Goddard's reusable flight software framework for local-device management, event generation, and software messaging, while CFS contains supporting applications and libraries. Significant applications found in CFS that are used in the flight system are the Scheduler (SCH), Health Services (HS), File Manager (FM), and Stored Commands (SC). SCH is used mostly to schedule telemetry requests to our applications. HS is used primarily to handle watchdog interaction. FM is used to manipulate files in the NAND flash. Finally, SC is used to execute command sequences, such as an image capture at an absolute or relative time.
Ground-Station Software: To monitor the progress of the mission and perform all primary and secondary objectives, a ground station is setup with commanding software. The ground station deploys the TReK (Telescience Resource Kit) to receive and monitor packets sent from ISEM-CSP on board the ISS [15]. Packets can be received and sent through a graphical interface built to interact with the TReK software. This GUI was developed with the open source IRC (Interoperable Remote Component) application framework with an example configuration for this mission provided by NASA Goddard. The application framework uses XML descriptions that can be modified to easily parse, interpret, and display incoming data, as well as, send commands. IRC can be used to save and store commands through the GUI interface. The GUI also allows the operator to select and send commands.
Primary Objectives
ISEM-CSP has several primary requirements to fulfill in order to declare mission success. The first objective of ISEM-CSP is to advance the TRL of the Xilinx Zynq SoC in Low Earth Orbit. This device is crucial for study in the development of a new generation of space computers. It is also one of many devices that are being considered for the next generation of the SpaceCube family of reconfigurable computers developed by NASA Goddard's Science Data Processing Branch.
Another key directive for the mission is to closely monitor and record the upset rates of both the processing system and programmable logic of the Zynq to provide environmental information in preparation for future missions. The main upset rates to be examined are the performance of the ARM cores, as well as, the L1 and L2 caches.
The final primary requirement is to perform image-processing techniques including noise reduction and image enhancement on terrestrial-scene data products. Image processing will be demonstrated with hardware acceleration in the FPGA fabric and compared with processing on the ARM cores with NEON acceleration. These high-resolution (5 Mpixel) images can then be compressed using JPEG2000 or converted to .ppm for downlink as thumbnails or complete images and displayed on the ground-station system image viewer.
Secondary Objectives
As a technology mission and experiment, ISEM-CSP has the freedom to explore additional research-oriented tasks as well as the ability to upload new applications and software, when not performing primary mission tasks. There are several secondary objectives that will be explored throughout the duration of the mission and are discussed in this section.
Autonomous Computing: The IP app provides access to our image-processing suite, which includes several algorithms to perform a variety of functions. For future space-processing missions, it may become necessary for processing tasks to be completed autonomously. Basic exploratory functions have been added to CSPv1 to begin testing this domain of applications. The IP app has a set of algorithms for classifying images. These algorithms can allow CSP0 to autonomously make decisions about which images to keep, without user intervention. In a restricted downlink scenario, this app can determine if an image taken is unnecessary (e.g., an all-white image from cloud cover, or all-blue from just the sea), and can delete the image, saving storage capacity as well as preventing this picture from wasting downlink bandwidth.
In-Situ Upload Capability: The CSP flight box has additional software features, which include software and firmware uploads. Flight software updates will primarily be made by uploading new cFE table and configuration files. cFE tables can be used to change the behavior of applications, or even to load new applications. As an example, an SC table can be uploaded that includes commands for cFE to start an uploaded cFE application, or stop an old version and load a new one from flash memory. For more drastic changes, such as a Linux kernel update, new boot images can be uploaded and stored in the partition in the region after the golden images as described previously. The new environment will contain instructions for U-Boot on booting the new image. If the U-Boot environment ever becomes corrupt, U-Boot will default to booting the golden image. Lastly, additional functionality on this mission includes file transfer between CSP0 and CSP1. The FTDPRECV and FTDPSEND apps can allow the transfer of large files or configurations between the two flight boards.
Partial Reconfiguration: The CSPv1 will be one of the first deployed space computers to include Partial Reconfiguration (PR) functionality. PR is the process of changing a specialized section of reconfigurable hardware during operational runtime. The CSPv1 allows multiple applications to be performed in the FPGA fabric without reconfiguring the entire device. PR can be used in space missions to reduce the total-area utilization of the fabric by switching out designs to reduce the vulnerable configuration area, employing fault-tolerant reconfigurable structures, and allowing new algorithms and applications to be uploaded after completion of the primary mission. PR can improve the performance of a device by allowing the user to include a suite of application designs to fit within a PR region, enabling a larger number of applications to be accelerated by hardware, rather than limited by a single static FPGA design. The CSPv1's corrective scrubbing and error logging are also available to PR design regions.
Space Middleware: The CSP explores new fault-tolerant approaches beyond pure hardware radiation-tolerance by extending its fault-mitigation considerations to flight software. In contrast to FPGA mitigation techniques discussed in previous sections, this experimental research takes a processor-centric perspective to assist in developing resilient applications on the processing system as the ADDAM (Adaptive Dependable Distributed Aerospace Middleware). The ADDAM research is motivated by a pursuit to provide a middleware platform of software services for fault-tolerant computing in harsh environments where execution errors are expected to be common in occurrence.
The means for accomplishing software resilience is through process redundancy: through a system of multiple processes operating in pursuit of a common application, the resilience is ameliorated while mitigating individual instances of execution failure. In order to recover from potential failures in processes over the application execution, the processes are developed with ADDAM through task division. Task division in the system is modeled after a traditional message-passing system and these tasks can be distinct for distributed processing, or replicated for increased redundancy.
Each process has a unique identifier, referenced globally in the network of processes for peer communication. The identifier is also used for correlating a process with its role of either the coordinator instance or worker instance, of which the same process can assume either role as needed. Worker failover is handled by task re-issue from the coordinator, coordinator failover is being developed through distributed election, and both types of failover are assisted with process restart through a cyclical processor monitor to prevent ADDAM process extinction through successive execution faults.
The latest prototype of ADDAM provides fault awareness to an app developer via an internal publish/subscribe messaging system for propagating events. The messaging system operates on events generated by discrete modules based on specific functionality. Currently, ADDAM generates events for process discovery, tracking peer connections and disconnections through heartbeats for the health reactor, which in turn generates events used for both the task manager as it dispatches workload divisions specified by the developer, and the coordination manager for determining process roles. Advanced fault- mitigation strategies and execution patterns can be developed to adapt behavior depending on mission parameters. Through this system, an extensible platform for generating fault awareness is available as another tool for incorporating fault-tolerant computing techniques onto a variety of space computers.
Device Virtualization and Dynamic Synthesis: The last secondary goal of the ISEM-CSP mission is to demonstrate an improved productivity tool set by generating FPGA designs through device virtualization and dynamic synthesis. This research will allow future adopters of CSPv1 to have an easier effort in adapting FPGA designs to make use of the full SoC system. The performance and power advantages of FPGA hybrid computing system are well established, but have attendant challenges that have limited adoption of the technology. From the perspective of application designers, writing FPGA-accelerated code is a time-consuming process, complicated by low-level and relatively unfamiliar hardware-description languages (e.g. VHDL) typically used in design, and lengthy hardware-compilation times of tens of minutes to hours required even to make minor design changes [18]. The effectiveness of FPGA-accelerated cores is also limited by the efficiency of data transfer between the design cores and host software, which requires careful consideration of data-access patterns and work in kernel to optimize memory bandwidth.
From the perspective of system designers, FPGA acceleration poses additional challenges: how can multiple applications be supported efficiently using common and limited hardware resources (e.g. ultimately FPGA area); how can these systems be made resilient against changing applications and workloads; and how can system security be ensured when applications are encouraged to modify hardware, especially hardware with access to system memory and other privileged resources? These challenges are even more significant for space systems, where high launch costs can be better amortized by more flexible systems. Similarly, the cost of system failure due to errant hardware is significantly higher, with limited options for remediation.
Academic work on device virtualization and dynamic synthesis from high-level languages such as OpenCL has shown significant promise to help address these challenges . Device virtualization raises the fine-grained FPGA device (e.g. lookup table and register logic resources) up to the higher level of an application or domain by compiling to flexible high-level overlays rather than directly to the device.
CSPv1 integrates an implementation of OpenCL that uses this approach, called CLIF , as illustrated in Figure 17. Applications using this framework are written against a C task and data API, with computational kernels specified in the OpenCL kernel language. Unlike other OpenCL implementations for FPGAs, applications package their kernels' source and rely on CLIF's runtime compiler to handle device mapping. This mapping is performed using overlays from the system's overlay library, which can improve system flexibility in multiple scenarios:
• Hardware/software partitioning is deferred until runtime, where it may be informed by dynamic properties of the system (e.g., power, damaged regions, or the needs of other workloads).
• New applications or changes are added by small patches to application software, and hardware accelerated using support already in the overlay library or added through newly uploaded overlays.
• The system is free to introduce error mitigation or detection, or even optimizations, without requiring changes to application software (e.g., binding to fault-tolerant overlay instances).
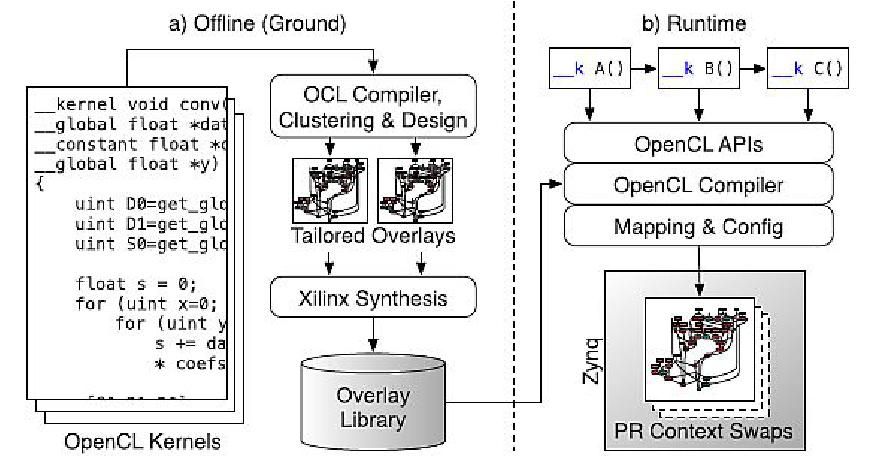
This approach has other benefits for system design and security. High-level kernel descriptions permit the compiler to perform optimizations that can be infeasible for human designers. For example, previous work has shown that aggressive inter-kernel resource sharing using overlays can result in up to 70% lower area, with up to 250x faster kernel switches. Since applications are implemented using the system's overlays rather than directly using FPGA resources, security policies can be enforced by restricting the capabilities provided by this overlay library. For example, in our implementation, accelerators have high-performance access to system memory through the Zynq coherency port. However, the addresses kernels can access over this interface are restricted by each overlay's memory controller to protect against faulting or malignant applications.
In summary, the mission will serve as a TRL advancement and space validation for the CSPv1 board and its supporting software. During the mission, the project will collect valuable radiation data and upset rates to the CSPv1 boards and gain insight to make improvements to the design. This mission is also a unique opportunity to test techniques and applications, that have not been attempted in space systems to date. The ISEM-CSP flight box is the first venture into exploring the capabilities of the CSPv1 flight board and the CSP concept in a real space environment, and will help to advance studies for the next generation of space processors and prepare CSPv1 for future advanced missions.
Due to its capability to upload new flight hardware and software, the ISEM-CSP flight box will be a continuous development platform to upload new applications and software well after all of its objectives have been completed. This functionality provides an opportunity to test the effectiveness of these applications on an actual space platform without needing to wait for a new mission with a scheduled launch, thereby accelerating development and verification of new flight software.
SpaceCube is a MISSION ENABLING technology
• Delivers 10 x to 100 x on-board computing power
• Cross-cutting (Earth/Space/Planetary/Exploration)
• Being reconfigurable equals BIG SAVINGS
• Past research / missions have proven viability
• Ready for infusion into operational missions.
STP-H5: Raven (Autonomous Space Navigation Demonstration)
Raven is developed, integrated, and operated by the Satellite Servicing Capabilities Office (SSCO), the same team that built and conducts the multi-phased RRM (Robotic Refueling Mission) experiment on the ISS. A previous, single-sensor version of Raven technology flew as the Relative Navigation Sensor (RNS) Payload on STS-125 during the Hubble Space Telescope Servicing Mission 4. The Raven visible camera is a repurposed flight unit from the STS-125 demonstration. Raven also reuses the flash lidar flown as part of the Sensor Test for RelNav Risk Mitigation (STORRM) demonstration on STS-134. Raven uses a version of the infrared camera manifested on STS-128, STS-131, and STS-135 as part of the Neptec TriDAR demonstrations. Both RRM and Raven are part of SSCO's ongoing campaign to develop and test advanced technologies, tools and techniques for the Restore-L servicing mission. 10)
Experiment Description
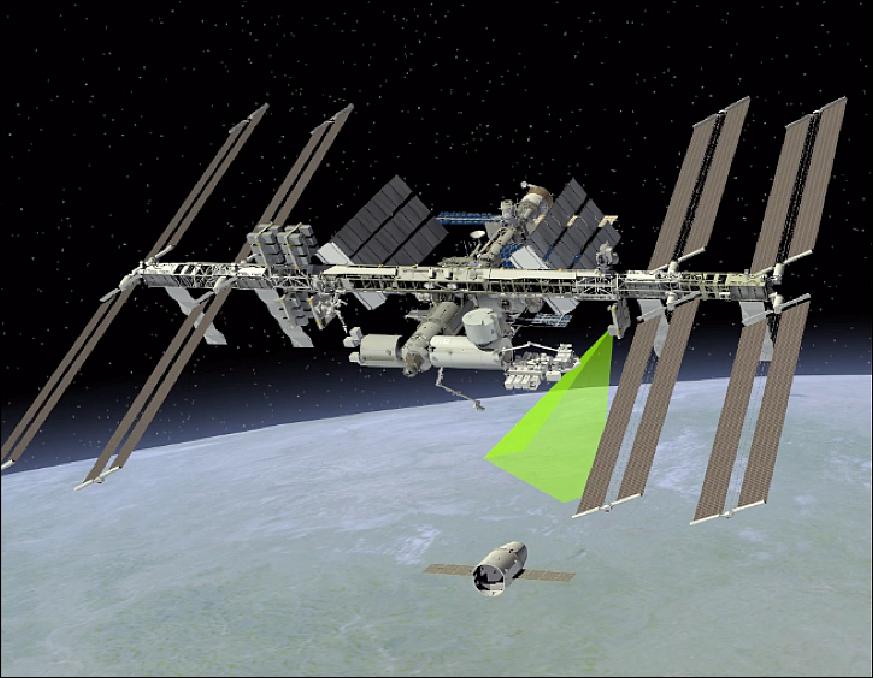
Many future exploration missions have to robotically or autonomously dock, capture, or land on exploration sites, whether those sites are other spacecraft, orbital outposts, asteroids, comets, or planetary moons. With such a breadth of missions ahead of it, NASA desires a single solution to meet each of these mission's relative navigation needs. Raven seeks to demonstrate that a single suite of sensors, avionics, and algorithms can indeed navigate a spacecraft to cooperative objects — those that have visible aides used for navigation purposes —as well as legacy satellites that were not designed to be serviced, or natural planetary bodies.
Raven uses a complex and compact system to image and track the many visiting vehicles that journey to the space station each year. It contains three separate sensors that span multiple wavelengths, coupled with high-performance, reprogrammable avionics that process imagery. Raven's vision processing and navigation algorithms convert the imagery collected by the sensors into an accurate relative navigation solution between Raven and the vehicle. Raven also uses a two-axis gimbal to point its sensors at the vehicle to increase the time it has to follow the vehicle into docking or berthing.
Successful Raven operations allow NASA to demonstrate that a similar system can be used to pilot a satellite-servicing vehicle to a client spacecraft, verifying a key technology for the future Restore-L servicing mission. Additionally, Raven demonstrates that NASA can move to a common specification on autonomous rendezvous and docking technologies, which means that a single set of hardware could meet the needs of multiple missions. This approach saves the government money over time, as it provides a standard specification that mission managers can order from, and that vendors can build to.
SSL (Space Systems Loral) provided the two-axis gimbal mechanism for NASA's Raven flight demonstration. Raven will use the two-axis gimbal mechanism to point its Rendezvous and Proximity Operations sensors at visiting vehicles as they make their approach to dock with the International Space Station. The gimbal is based on SSL's heritage Dual Access Positioning Mechanism, which is used to deploy and position reflectors, antennas, and electric thrusters on the SSL 1300 platform. Once integrated with the International Space Station, the Raven payload will be tested over a two-year period. 11)
SSL was selected by NASA and DARPA to partner on satellite servicing programs in both LEO (Low Earth Orbit) and GEO (Geosynchronous Orbit), and the company is also developing technologies for satellite self-assembly on orbit. Raven is expected to help NASA develop off-the-shelf relative navigation capability for future rendezvous missions, including satellite servicing and repair missions, asteroid exploration, and human exploration of the Moon, Mars and beyond.
During its stay aboard the space station, Raven's components will join forces to independently image and track incoming and outgoing visiting space station spacecraft. To do this, Raven's sensors will feed data they "see" to a processor, which will run sets of instructions (also known as special pose algorithms) to gauge the relative distance between Raven and the spacecraft it is tracking. Then, based on these calculations, the processor will autonomously send commands that swivel the Raven module on its gimbal, or pointing system, to keep the sensors trained on the vehicle, while continuing to tracking it. While these maneuvers take place, NASA operators on the ground will evaluate how Raven's technologies work together as a system, and will make adjustments to increase Raven's tracking performance. 12) 13)
Over its two-year lifespan, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat-7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA's Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD (Satellite Service Projects Division) is developing and managing both the Raven and Restore-L demonstration missions.
STP-H5: RHEME (Radiation Hardened Electronic Memory Experiment)
Spacecraft are continually exposed to radiation from the sun and other cosmic sources, but radiation can harm spacecraft computers by causing glitches and erasing data in their memories. This can affect a spacecraft's ability to work properly, including its ability to store data and communicate with ground controllers. The STP-H5-RHEME studies how frequently electronic memory experiences a glitch after being struck by high-energy particles in space. 14)
Experiment Description
Electronic memories operating in space are exposed to high energy protons and galactic cosmic rays, which are atoms that have been stripped of their surrounding shell of electrons. When these particles strike a memory or other microcircuit, they create a very brief current pulse that can change the information store in a memory bit from a logical 1 to a 0, or vice versa. In some cases, multiple bits of memory can be changed. The loss of this information can cause the electronics to malfunction and jeopardize the mission. We need to know how frequently these errors occur, how many memory locations are affected, and how we can efficiently correct the errors.
The STP-H5 RHEME instrument includes memories that were specifically designed to detect single errors and clusters of errors. Companion electronics count the number of errors and determine how often correction procedures need to be applied to prevent errors from being passed to other circuits.
The results of STP-H5 RHEME permit the design and building of memories that can detect and correct errors efficiently to eliminate errors in the spacecraft electronics without using more power than necessary.

Description: The STP-H5 RHEME instrument includes two types of SRAM (Static Random Access Memory) — four 16 Mbit devices and a 72 Mbit device composed of a stack of four 18 Mbit SRAM. The memories were designed by Silicon Space Technology, Inc. for space applications. The mapping of the logical to the physical address is known for each memory type. The memories incorporate EDAC (Error Detection And Correction) which may be turned on or off. The 16 Mbit SRAMs incorporate a scrubbing option that may be turned on or off, and the scrub rate may be selected. The 18 Mbit SRAM incorporates EDAC and an automatic read and write back which effectively scrubs the memory if the entire memory space is read. Both types of memory have undergone cyclotron testing to determine an upset cross section as a function of ion LET (linear energy transfer). The characterizations have been done for the beam impinging at normal incidence to the memory and at angled incidence. The occurrence of multiple bit upsets as a function of LET and angle of incidence have been determined.
These terrestrial test results are compared with the on-orbit results to determine the fidelity of the terrestrial tests in simulating the space environment. The EDAC implementation allows for single error correction and double error detection. Its correction capability can be defeated if two or more bits in the memory word are corrupted. The multiple bit error can occur from independent ion strikes that upset bits in the same word. This accumulation of errors can be defeated by scrubbing (i.e., reading, correcting, and re-writing) the memory at a rate that is faster than error accumulation. The 16 Mbit SRAM has scrubbing circuitry built into the memory that may be activated at different scrub rates or turned off. Since the scrubbing procedure consumes power, it should be performed at the lowest possible rate needed to prevent error accumulation.
The STP-H5 RHEME experiment can vary the scrub rate and assess the effectiveness of scrubbing. The STP-H5 RHEME experiment is divided into four segments: (1) no EDAC and no scrubbing, (2) EDAC and no scrubbing, (3) EDAC and low rate scrubbing, and (4) EDAC and high rate scrubbing. The results in each case are compared to the terrestrial tests. The identification and frequency of occurrence of multiple bit upsets from a single heavy ion strike are especially interesting. The frequency of upsets can be correlated to the environment through STP-H5 RHEME's dosimeter sensor developed by RMD (Radiation Monitoring Devices). It incorporates a proton/electron discriminating detector and is capable of determining the percentage of dose due to protons and electrons, respectively. Thus, there is an independent measure of the proton environment that will permit and separation of proton induced memory upset from galactic cosmic ray (i.e., heavy ion) upset rates.
Operational Requirements and Protocols: STP-H5 RHEME's dosimeter experiments generate data packets at irregular intervals, depending on the space radiation conditions at a point in time. This experiment is responsible for most of the data that STP-H5 RHEME generates. An average of 70 kB/s of data from STP-H5 RHEME is expected. STP-H5 RHEME's memory experiment consist on interrogating the onboard SRAMs once every hour about any upset detected. This experiment generates about 1 kbyte of data each time the memories are interrogated. Memory testing results are transmitted alongside the dosimeter data. To successfully complete both experiments STP-H5 RHEME should be facing open space, and data generated by both experiments should be transmitted down to Earth for its analysis. No return of samples or equipment is necessary.
STP-H5 RHEME has five modes of operation that are used at different periods of the mission. Upon booting, STP-H5 RHEME enters a default operation mode which includes having all onboard SRAM memories configured without scrubbing or EDAC protection and the dosimeter's data acquisition subsystem ready to gather and processes data. The other four modes consist of different combinations of memory configurations providing different levels of protection against radiation induced upsets. On all five modes the dosimeter experiment does not change its default operation. STP-H5 RHEME switches modes sequentially each six months throughout the mission's end of life. Changing STP-H5 RHEME's operation mode requires a command packet being sent to the experiment. Power cycling is not considered as a normal experiment procedure, but can be considered if the experiment fails at any point in time due to radiation induced upsets on the control and communication subsystems.
STP-H5: CHREC (Center for High-performance REconfigurable Computing)
The STP-H5-CHREC Space Processor (CSP) investigation studies a miniature space computer for use on CubeSats, SmallSats and other small spacecraft systems. It is designed to tolerate space radiation, which can damage computer systems, and to minimize energy use and cost. Results validate next-generation computer technology that can be used in future small satellites and other NASA missions. 15)
Experiment Description
Modern COTS (Commercial-off-the-Shelf) processors provide the utmost in performance and energy-efficiency but are susceptible to ionizing radiation in space, whereas radiation-hardened processors are virtually immune to this radiation but are much more expensive, larger, less energy-efficient, and generations behind in speed and functionality.
The primary research goal of the STP-H5-CHREC Space Processor (STP-H5 CSP) project is to investigate and evaluate methods by which we can intelligently combine radiation-hardened and COTS components to produce a hybrid computing system which achieves higher computational performance (among other benefits) than an equivalent (and more expensive) entirely radiation-hardened system, and higher reliability than an equivalent all-COTS system.
Moreover, the CSP project focuses upon how best to apply a broad array of principles in fault-tolerant computing to augment the inherent reliability of a mixed radiation-hardened and COTS computing solution for varying mission needs.
This technology demonstration uses a new approach to space computer design along with new state-of-the-art devices to show that high-performance embedded processors can be reliably developed for lower cost and power consumption.
If successful, this research will prove the usefulness of experimental design and fault-tolerant strategies demonstrated in CSP as well as build more confidence in the incorporation of more commercial components and technology in space systems.
Description: Given the nature and purpose of past, present, and future spacecraft, from earth science to space science and exploration to defense surveillance, one of the most critical needs and daunting challenges is on-board computing. This challenge comes in two major areas, compression and/or processing of data from on-board sensors, and processing of data for autonomous-control functions such as landing and docking. In both areas, demands are rapidly accelerating because of technology advances in other areas, and conventional on-board computing technologies are falling behind, in terms of performance required in a harsh space environment with limited size, weight, and power as well as the inherent hazards of radiation effects outside our planet's atmosphere. Research on the CHREC Space Processor (CSP) takes a multifaceted approach to on-board computing for use in small satellites (CubeSats or NanoSats), a scalable approach that can support spacecraft of all sizes. Working in collaboration with the NASA/GSFC SpaceCube team, researchers in the NSF Center for High-Performance and Reconfigurable Computing (CHREC) at Florida and BYU are developing hybrid space computers that feature an innovative combination of three technologies: COTS devices; radiation-hardened (RadHard) devices; and fault-tolerant computing. Modern COTS processors provide the utmost in performance and energy-efficiency but are susceptible to ionizing radiation in space, whereas RadHard processors are virtually immune to this radiation but are more expensive, larger, less energy-efficient, and generation(s) behind in speed and functionality. By featuring COTS devices to perform the critical data processing, supported by simpler RadHard devices that monitor and manage the COTS devices, and augmented with novel uses of fault-tolerant hardware, software, information, and networking within and between COTS devices, the resulting system can maximize performance and reliability (called performability) while minimizing energy consumption and cost.
STP-H5 CSP with CHREC Space Processor (CSPv1), the system architecture is hybrid in nature, featuring a modern, reconfigurable COTS processor with external COTS memory for high-speed and low-power operation, a configurable mix of fault-tolerant computing mechanisms to improve reliability of COTS components, and a set of RadHard components including NAND flash, power circuit, watchdog controller, and reset circuit for reliable operations. The processor architecture is also hybrid in nature, with fixed and reconfigurable logic, featuring the Xilinx Zynq-7020 system-on-chip comprised of dual ARM Cortex-A9/Neon cores, an Artix-7 field-programmable gate array (FPGA) fabric, and supporting IP. Finally, the fault-tolerant architecture consists of authentication for bootstrap from multiple images in flash, error-correction coding on memory, internal and external watchdogs for the processor, and a library of software and hardware objects that can be selectively layered atop the fixed and reconfigurable halves of the Zynq. These architectures are evaluated for and during the mission in terms of performance, reliability, power, and cost as well as initial data on radiation effects.
Operational Requirements and Protocols: Operational requirements for CSP include the successful downlink of terrestrial scene image products, high-performance image processing of data products, recording FPGA upset and scrubbing data, recording processor upset rates. The exploration of fault-tolerant computing techniques includes reliable middleware and novel approaches for overhead reduction of fault-tolerant designs, upload of new applications and programs on orbit to extend mission objectives, partial Reconfiguration (PR) of functions and applications, autonomous computing through selection of "good" images with image classification algorithms, use of multiple virtualized accelerators ("contexts") for reduced logic area and improved system and application flexibility. Demonstration of adapting hardware for changing workloads using dynamic and runtime synthesis, use of high-level synthesis and OpenCL system APIs for onboard processing.
CSP continuously sends health and status information as well as periodic compressed thumbnail terrestrial images for evaluation and future download. Image products are autonomously screened with image classifiers to block out all-black or completely cloud covered images. Images products can be selectively processed with a variety of image processing techniques including edge enhancement and compression. Ground station sends up commands to: upload new applications, request processing of images, downlink larger resolution images, download logs and experiment files.
STP-H5: SHM (Structural Health Monitoring)
Satellites and space cargo are subjected to intense shaking and extreme temperatures during launch and arrival in low-Earth orbit, and commercial off-the-shelf equipment is not designed to withstand these physical challenges. The Space Test Program-H5-Spacecraft Structural Health Monitoring investigation (STP-H5 -SHM) captures how the fasteners, glue and mechanical parts on the Space Test Program equipment change from its assembly, testing and arrival in orbit. Results provide new methods for determining various ways in which equipment fails, from bolts that have jostled loose to debris impacts. 16)
Experiment Description
The research provides AFRL (Air Force Research Laboratory) a metric for the utility of Space Test Program-H5-Spacecraft Structural Health Monitoring investigation (STP-H5- SHM) to track change on a relevant spacecraft through a real integration procedure and degradation of the hardware in a relevant environment.
Logistical and performance metrics are identified into the true impact of integrating an SHM setup onto a spacecraft and the level of detail possible for inspection given a minimum number of sensors. COTS (Commercial-off-the-Shelf) hardware are assessed for reliability in a harsh operating environment for long term performance changes that may impact scientific results. AFRL is working towards making all measured data available to academic partners for evaluating various SHM techniques.
Spacecraft SHM (Structural Health Monitoring) may prove to provide a higher level of detail for anomaly resolution based on mechanical issues (loose bolts, bad thermal interfaces, poor adhesive bonds, etc.) that may occur during the assembly, integration and testing operations to on-orbit missions. The ability to compare changed states with a known 'healthy' baseline may give technicians added assurance to the quality of the overall system from a structural perspective. For example, when a spacecraft is hit by orbital debris, the difference in electrical charges of the two bodies may cause some electrical upset to some subsystem. Ground personnel may have to put the system in a safe mode to diagnose all systems to ensure safe operational parameters. SHM, if operational at the time may be able to detect the impact event or if turned on after the impact, can detect the location of the impact on the structure allowing ground support to quickly isolate the source of the event that caused the anomaly and save weeks of diagnostic exercises.
Description: The principal objective of the STP-H5- SHM is to demonstrate SHM utility on a spacecraft prior/during/after system launch. All data is collected and inventoried in such a way that distribution is possible to SHM collaborators to investigate alternative approaches. Of specific interest with this experiment is collection of guided wave measurements as structural mates are made and preload applied to the monitored plates (base and bunker walls). Changes are tracked and monitored for detection resolution and reliability. Additionally, final assembly health is checked during environmental testing to capture changes to the loading profile on the plates. Once on orbit, the boundary conditions of the spacecraft are regularly inspected for deviations under space environmental loading and hardware reliability is tracked. The hardware uses PWAS (Piezoelectric Wafer Active Sensors) to serve as the SHM transducers. Each PWAS transfers electrical signals to mechanical displacements (and vice versa) to create guided ultrasonic waves. These waves reflect features in the structure and the wave information is used to track changes. Additionally 3 tri-axial accelerometers are used to monitor low level dynamics of the payload at its mounted position on ISS.
Operational Requirements and Protocols: The STP-H5 hardware complement is installed with the SSRMS (Space Station Remote Manipulator System) and activated via ground based commands. Instrument health, status and operational data are downlinked via standard ISS 1553 communications protocols.
Measurement setups can be provided to the Principal Investigator to setup and execute. Parameters of interest for Guided Wave tests include frequency, steps, step size, measured time, averaging, gain, chirp setup. Accelerometer measurements can be varied by the sampling rate and number of measurement points recorded per interval.
STP-H5: FPS (Fabry Perot Spectrometer) for Methane
Methane is a powerful greenhouse gas with many human-caused and natural sources, and understanding where it arises on Earth improves climate change models. The STP-H5- FPS) investigation demonstrates a new atmospheric methane sensor that is smaller, cheaper and simpler than current sensors. Results improve designs for future space-based methane observatories that can focus on high latitudes, where methane production from thawing permafrost is a serious concern. 17)
Experiment Description
Methane is an important greenhouse gas that has been increasing in the atmosphere over the last few decades. The reasons for these changes is not well understood. The measurements obtained by the STP-H5-FPS instrument permit mapping of methane at a fine scale to help determine the sources and sinks of atmospheric methane.
Methane transport models enable some mapping to extend to higher latitudes beyond the orbit of the space station. These measurements serve to improve modeling of global warming and our understanding of processes contributing to global warming.
This instrument also serves as a step on the path to new, small, targeted spectroscopic instruments enabling an improved understanding of our global environment at an affordable cost.
Description: Atmospheric methane (CH7) is the second leading manmade contribution to global warming by greenhouse gases, amounting to nearly one third of that from carbon dioxide (CO2). The global background abundance of CH4, and its gross source and sink, is relatively well known from ground-based measurements in remote regions , and the centennial increase in CH4 from about 0.7 ppmv preindustrial to 1.8 ppmv currently is well-documented . The global sink of CH4 occurs largely in chemical reaction with OH molecules with little trend over the last few decades . What is not well known, however, is the partitioning among different CH4 source processes, their regional distribution, and the attribution of temporal changes to underlying process forcing.
Natural sources of CH4 account for about one-third of the emission total, dominated by wetland emissions in the tropics and sub-Arctic boreal regions, with additional contributions from termites, ocean biology, and a geological source of unknown significance. The wetland source is particularly variable, linked to temperature, precipitation, and surface hydrological changes.
CH4 emissions resulting from human activities are the largest global source globally with major components from coal mining, oil and gas extraction, ruminant and rice agriculture, landfills, and biomass burning. Each of these processes has its unique spatial distribution, and sector emission uncertainties from bottom-up and top-down inventories are estimated to be on the order of 20% . A major challenge here is to understand the current global trend in CH4, which is generally attributed to manmade source variations, but with unknown sector and natural contributions The reasons for the observed changes in growth rate and the implications for future changes in atmospheric CH4 are not understood .
The uncertainty in our knowledge of CH4 regional sector source magnitudes, processes, and variations basically derives from the inherent difficulty of measuring CH4 in the atmosphere with sufficiently high precision across the wide range of spatial scales required for a trace gas with highly local sources and an approximate 9-year lifetime. The basic message from limited observations to date is that CH4 gradients driven by surface emissions, atmospheric (plus small surface) losses, and transport are distinct, global, and highly variable.
The overall goal of the STP-H5- FPS investigation is to develop, construct, and operate an innovative space instrument to measure CH4. The measurements will complement missions planned by NASA and other nations targeted at global greenhouse gases. The data are used to address key science questions related to the distribution, fluxes, and trends of CH4 that will improve our basic process understanding and enable better projections of greenhouse gas climate impacts in the future.
The top-level science questions are:
1) What is the current global baseline distribution of CH4 in the atmosphere?
2) What is the balance of the principal CH4 sources and sinks?
3) What processes have driven observed changes in CH4 growth rate over the last 20 years and how may they influence future growth rates as climate changes?
4) What complement of space-based remote sensing instruments is needed to monitor greenhouse gases?
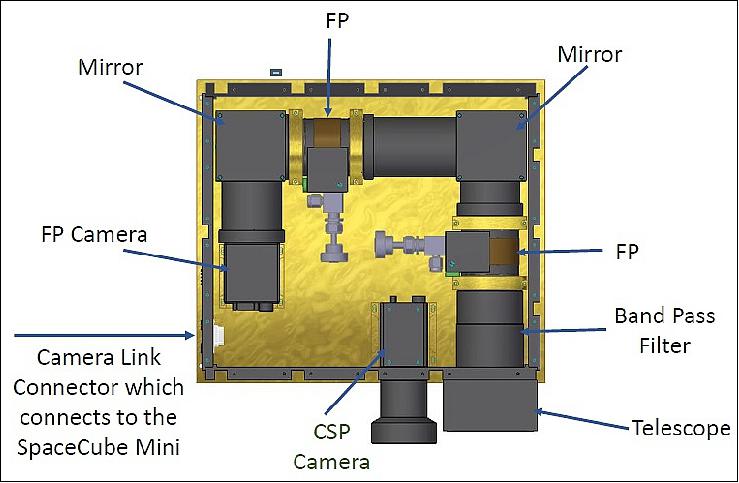
The Fabry-Perot based spectrometer is well suited to address these questions. Fabry-Perot instruments have a high light throughput even when operating at high spectral resolution. Tthis enables the instrument to target a very short spectral region specific to methane. This large throughput enables operation with a short integration time allowing the instrument to measure over small regions of the surface permitting discrimination of small methane sources. While the orbit of the space station does not reach high latitudes where methane emission from the permafrost is a serious concern this pioneering instrument points the way for additional observations from platforms with higher orbital inclination to address the questions of climate change in the longer term.
Operational Requirements and Protocols: FPS is scheduled to operate for a minimum of one year to capture seasonal variations in atmospheric methane, with two years being a goal. The instrument can operate continuously, but some downtime due to the sharing of the STP-H5 data downlink is acceptable and expected. Infrequent downtime due to other ISS needs is also acceptable and no special accommodations are required for this instrument.
This instrument used reflected sunlight to make its measurements. As such it does not make observations on the dark half of an orbit. That said some dark observations are needed to monitor the long term stability and calibration of the instrument. It is also the case that the power requirements for the instrument are very modest so it may well be that it is left on continuously.
STP-H5: EHD (Electro-Hydro Dynamics)
The EHD payload on the STP-H5 pallet demonstrates a fluid pump driven by electric fields, eliminating fragile, failure-prone mechanical components and reducing mass. The spacecraft and many scientific instruments rely on a fluid cooling system in which coolant is transported through radiators to expel heat generated by onboard systems such as electronics. Currently, most systems use mechanical pumps that can fail during the intense vibration of launch and are prone to degradation over long periods of operation. 18)
EHD employs an electric field to pump coolant through a thermal cold plate from where excess head is dumped onto a radiator. Mechanical parts are replaced by electrodes that deliver the voltage needed to move the coolant. Applying a high-intensity field to a fluid causes molecules to dissociate into ions which then redistribute due to the present electric field – forming heterochange layers. Fluid motion is induced by electrodes that generate asymmetrical electric fields.
The design enables a unique scalability by varying the size of the cold plates from lab-on-a-chip devices to application on large satellites. The EHD payload employs five pumps, operating in parallel, each with an operating voltage of 1000 V to achieve a flow rate of 0.5 gram/second that will be measured by a thermal mass flow sensor and seven thermocouples.
The EHD demonstration has the primary objective of verifying that the design can withstand the launch environment and can be operationally used in orbit. Long-term operation is a secondary goal to advance the technology readiness level of what is hoped to become the future of satellite thermal control.

STP-H5: APS (Automated Plume Sentry)
Charge-exchange plasma interactions have been extensively studied. However, there are few in-flight investigations because of limited spaceflight opportunities. The APS sensor monitors the electrical current resulting from charge exchange of the neutral effluents from approaching spacecraft. This allows characterizing of spacecraft surface charging, the interaction of spacecraft and the ambient environment, and detect and map significant natural events in the ambient environment. 19)
The STP-H5 APS sensor provides a better understanding of the impact of low-energy charge exchange ion environment of an approaching spacecraft with the ISS (International Space Station). Charge distribution and accumulation near spacecraft is a potential contamination source for instruments and solar arrays. The development of such a technology demonstrates the availability of low-cost techniques for monitoring these conditions.
STP-H5: ICE (Innovative Coatings Experiment)
The Innovative Coatings Experiment flying on the STP-H5 mission is a space exposure study that examines the degradation experienced by a variety of materials over a two-year space mission. It is a well known fact that the harsh radiation and extreme temperatures experienced in Low Earth Orbit can corrode the paint and coatings of spacecraft and cause optical components to degrade over time.
A series of coatings were specifically developed to improve the thermal spacecraft design, robotic camera recognition and contamination control for an overall improvement of future satellite missions. These coatings are tested on the ground using UV radiation, atomic oxygen and vacuum exposure, however, these ground-based tests may not accurately simulate the environment in orbit and a space exposure study is the most cost effective way of examining the long-duration effects of the space environment.
The ICE experiment exposes eight new and two reference coatings to the LEO environment for a two-year mission. Visual and photographic observation will be used to evaluate the optical and color stability of the coatings relative to the reference standards. Coatings that are part of ICE include new 'whiter' radiator coatings for optimized operation, electrically-dissipative coatings, color coatings for robotic recognition of docking ports, molecular absorber coatings developed to protect optical components by absorbing contaminants, and super-hydrophobic coatings for surface contamination protection. Imagery of the ICE samples will be obtained at a two-week to one-month cadence.
STP-H5: iMESA-R (Integrated Miniaturized Electrostatic Analyzer -Reflight)
The instrument suite focuses on ionospheric irregularities known as bubbles that can result in atmospheric turbulence and loss of GPS signal lock and interruptions in communications. Particular focus is on determining the origin and impact of plasma irregularities surrounding an orbital spacecraft. iMESA allows one small sensor suite to perform an array of plasma measurements, covering low-energy and high-energy electrons, protons, and heavy ions; magnetic field; and electric field.
STP-H5: GROUP-C (GPS Radio Occultation and Ultraviolet Photometry Co-located)
GROUP-C is a space weather payload operated in close conjunction with LITES to form a UV and Radio Ionospheric Observation suite operated from the International Space Station. Together, the two will deliver tomographic measurements of the ionosphere at a 20 km vertical and horizontal resolution. GROUP-C employs a pair of sensors to measure electron and ion densities in the ionosphere. 20)
NRL (Naval Research Laboratory) is the developer of GROUP-C with Scott Budzien as PI and NASA funding. GROUP-C includes two sensors: the FOTON (Fast Orbital TEC, Observables, and Navigation) L1/L2 GPS receiver, which provides vertical electron density profiles and scintillation; and TIP (Tiny Ionospheric Photometer), a FUV (Far-Ultraviolet) photometer for measuring horizontal ionosphere gradients. The FOTON receiver includes a capability for multipath mitigation using a multi-antenna array. The TIP photometer is similar to the photometers aboard the COSMIC satellites with minor improvements in optical performance.
Ionospheric irregularities, also known as ionospheric bubbles, are transient features of the low and middle latitude ionosphere with important implications for operational systems. Understanding irregularity formation, development, and evolution is vital for efforts within NASA and DoD (Department of Defense) to forecast scintillation. Irregularity structures have been studied primarily using ground-based systems, though some spaceborne remote and in-situ sensing has been performed. In combination with GROUP-C, the LITES (Limb-imaging Ionospheric and Thermospheric Extreme-ultraviolet Spectrograph) experiment on STP-H5 serves as an interactive ionospheric observatory on the ISS.
These experiments provide a new capability to study low- and mid-latitude ionospheric structures on a global scale. By combining for the first time high-sensitivity in-track photometry with vertical ionospheric airglow spectrographic imagery, and simultaneous GPS TEC (Total Electron Content) and scintillation measurements, high-fidelity optical tomographic reconstruction of bubbles can be performed from the ISS. Ground-based imagery can supplement the tomography by providing all-sky images of ionospheric structures (e.g. bubbles and TIDs) and of signatures of lower atmospheric dynamics, such as gravity waves, that may play a role in irregularity formation.

The GROUP-C FUV photometer is employed on the nightside of Earth to characterize horizontal ionosphere gradients/irregularities. Known as TIP (Tiny Ionospheric Photometer), the instrument employs a SrF2 (Strontium Fluoride) window that eliminates an oxygen emission line at 130.4 nm and passes the 135.6 nm O+ line without attenuation, viewing the nadir direction with a 3.8º FOV (Field of View) to capture horizontal bubbles in the ionosphere located below the Space Station.
FOTON makes use of L1 (1575 MHz) and L2c (1227 MHz) occultation measurements – that is tracking the two signals from a GPS satellite as the Earth's atmosphere moves into the line of sight between the instrument and GPS satellite. Analysis of the signal alteration by Earth's atmosphere can yield a number of atmospheric properties including TEC (Total Electron Content) which enables GROUP-C to monitor vertical variations of electron density.
STP-H5: LITES (Limb-Imaging Ionospheric and Thermospheric Extreme-Ultraviolet Spectrograph)
The LITES investigation studies the intensity of ionosphere airglow, which helps scientists understand the ionosphere's density and better understand and forecast space weather. Earth's ionosphere is a complex and dynamic region of the space environment consisting of a sparse plasma with a reasonably well-known climatology, interspersed with transient structures, depletions and bubbles, and irregularities. Global scale dynamical processes such as solar heating, waves, tides, electric fields, and auroral precipitation drive strong density gradients in the ionosphere. At both low and middle latitudes, plasma irregularities in the ionosphere create fluctuations in electron density and electric fields over a wide range of scale sizes. The larger bubbles and TIDs (Traveling Ionospheric Disturbances) can span hundreds or even thousands of kilometers and can cause errors in differential navigation solutions. The nighttime low-latitude ionosphere is also characterized by smaller-scale bubbles or plumes that are particularly severe at low latitudes under geomagnetically quiet conditions. The gradients associated with these plasma depletions serve as the breeding ground for the development of smaller secondary instabilities and perturbations. It is these phenomena that create scintillations on radio waves propagating through the affected region, affecting all frequencies less than a few GHz and causing interference and outages of radio navigation and communication links. Because of this impact on operational navigation and communication systems, understanding and forecasting irregularity formation, development, and evolution is a vital and vibrant area of research for the space weather community. 21) 22)
LITES was developed by NRL (Naval Research Laboratory) and University of Massachusetts at Lowell,with Andrew Stephan of NRL as PI and NASA as the sponsoring agency.
LITES measures the intensity of ultraviolet airglow that occurs naturally due to photochemical processes in the upper atmosphere. LITES is an imaging spectrograph that returns one-dimensional, vertical (altitude) profiles of 60-140 nm airglow from Earth's limb. By measuring the intensity of these emissions versus altitude on the limb, scientists are able to model and invert the intensity of specific emission features to determine the density of the corresponding species over this altitude range. The spectrograph design uses a toroidal grating to image the airglow scene vertically while recording spectra of the entire 10º scene horizontally. This combination of imaging in the vertical direction and spectroscopy in the horizontal direction is a result of the highly anamorphic toroidal grating. The radius of curvature of the grating along the dispersion axis is that of a Rowland spectrometer while the curvature along the orthogonal axis is approximately a factor of two larger and creates a one dimensional image of the sky at the focal plane. The grating images the sky onto the focal plane along the vertical axis while imaging and dispersing the pupil (the slit) along the horizontal axis. The sensitivity of the instrument is also greatly enhanced by the use of a single reflecting surface, the grating, since each reflectance at these ultraviolet wavelengths typically reduces the throughput by a factor of 2.
LITES is oriented on the payload to optimize measurements between 150-350 km altitude on the limb where the data of greatest scientific value are collected. LITES operates nearly continuously, with the exception of when the instrument field of view is within 30º of the Sun. The minimum mission is for 30 days of routine data collection, to allow for science data at a range of local times as the ISS orbit completes one full precession cycle, and one full year for comprehensive mission success to identify seasonal patterns in the data.
The LITES on-orbit procedures are limited to updating the schedule for autonomous on/off commands, when the ISS orbit beta angle is such that the instrument field of view is within 30º of the Sun. Additional real-time on/off commanding is done in situations such as ISS orbit maneuvers that could introduce risk to the instrument safety and health. Rarely (anticipated 2-4 times per year), small adjustments to the instrument high voltage levels will occur during the course of the mission to offset normal instrument wear and reduced efficiency.

Mission Status
• February 28, 2017: The STP-H5 payload was installed on ELC-1 and successfully activated, one day earlier than originally planned. Initial data indicates that the STP-H5 equipment is healthy. Activation of individual experiment packages is ongoing. STP-H5 is an EXPRESS ( EXpedite PRocessing of Experiments to Space Station) Pallet Adapter Flight Releasable Attachment Mechanism (ExPA-FRAM) based payload consisting of 13 individual experiments ranging from technology demonstrations to space and terrestrial weather measuring and monitoring. The experiments are provided and operated by DoD (Department of Defense) and NASA. 23)
• The SpaceX CRS-10 cargo ship arrived at the station on Feb. 23, 2017. Thomas Pesquet and Shane Kimbbrough grabbed Dragon at 10:44 GMT with Canadarm2. The cargo ship was officially berthed to the space station at 13:12 GMT. 24)
References
1) Christopher Wilson, Jacob Stewart, Patrick Gauvin, James MacKinnon, James Coole, Jonathan Urriste, Alan George, Gary Crum, Elizabeth Timmons, Jaclyn Beck, Tom Flatley, Mike Wirthlin, Alex Wilson, Aaron Stoddard, "CSP Hybrid Space Computing for STP-H5/ISEM on ISS," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-III-10, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3185&context=smallsat
2) "CHREC Space Processor (CSP) to fly on NASA Mission," University of Florida, Feb. 16, 2015, URL: https://www.ece.ufl.edu/node/1997
3) "Center for High-Performance & Reconfigurable Computing (CHREC)," 2014 Compendium of Industry-Nominated NSF I/UCRC Technological Breakthroughs, URL: http://faculty.washington.edu/scottcs/NSF/2014/CHREC.pdf
4) Thomas P. Flatley, "SpaceCubeSpaceCube: A Family Of Reconfigurable Hybrid On-Board Science Data Processors," 2014 International Conference on Reconfigurable Computing and FPGAs, Cancún, Mexico December 8-10, 2014, URL: https://spacecube.gsfc.nasa.gov/SpaceCube-Overview-Reconfig2014-Final2.pdf
5) Tabatha Thompson, Dan Huot, Stephanie Martin, "NASA Cargo Headed to Space Station Includes Important Experiments, Equipment," NASA, Feb. 19, 2017, Release 17-021 , URL: https://www.nasa.gov/press-release/nasa-cargo-headed-to-space-station-includes-important-experiments-equipment
6) "SpaceX CRS-10 Mission Overview," NASA, URL: https://www.nasa.gov/sites/default/files/atoms/files/spacex_crs-10_mission_overview.pdf
7) Ken Kremer, "NASA's Historic Pad 39A Back in Business with Maiden SpaceX Falcon 9 Blastoff to ISS and Booster Landing," Universe Today, Feb. 19, 2017, URL: http://www.universetoday.com/133508/nasas-historic-pad-39a-back-business-maiden-spacex-falcon-9-blastoff-iss-booster-landing/
8) Jeffrey R. Didion, "Electrically Driven Single Phase Thermal Management: STP-H5 EHD Experiment," NASA/GSFC, March 2016, URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20160003382.pdf
9) Jeffrey R. Didion, "Embedded Thermal Control Subsystems for Next Generation Spacecraft Applications," NASA/GSFC, 2015, URL: https://tfaws.nasa.gov/files/TFAWS2015-AT-05.pdf
10) "Raven (STP-H5 Raven)," NASA, Dec. 15, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1995.html
11) "SSL equipment for NASA spacecraft servicing demonstration reaches the International Space Station," SSL, Feb. 27, 2017, URL: http://sslmda.com/html/pressreleases/pr20170227.html
12) Peter Sooy, "NASA to Launch Raven to Develop Autonomous Rendezvous Capability," NASA, Feb. 14, 2017, URL: https://www.nasa.gov/feature/goddard/2017/nasa-to-launch-raven-to-develop-autonomous-rendezvous-capability
13) https://sspd.gsfc.nasa.gov/Relative_Navigation_System.html
14) "STP-H5-Radiation Hardened Electronic Memory Experiment (STP-H5 RHEME)," NASA, Dec. 15, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1996.html
15) "STP-H5-Center for High-performance REconfigurable Computing (CHREC) Space Processor (STP-H5 CSP)," NASA, Dec. 7, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1990.html
16) "STP-H5-Structural Health Monitoring (STP-H5 SHM)," NASA, Dec. 15, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1997.html
17) "STP-H5-Fabry Perot Spectrometer for Methane (STP-H5 FPS)," NASA, Dec. 15, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/2001.html
18) "STP-H5-Electro-Hydro Dynamics (STP-H5 EHD)," NASA, Dec. 7, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1993.html
19) "Space Test Program-H5 Automated Plume Sentry (STP-H5 APS)," NASA, Dec. 7, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1984.html
20) "Space Test Program-H5-GPS Radio Occultation and Ultraviolet Photometry Co-located (STP-H5 GROUP-C)," NASA, Dec. 15, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/2013.html
21) "STP-H5-Limb-Imaging Ionospheric and Thermospheric Extreme-Ultraviolet Spectrographs (STP-H5 LITES)," NASA, Dec. 15, 2016, URL: https://www.nasa.gov/mission_pages/station/research/experiments/2002.html
22) Andrew W. Stephan, Susanna C. Finn, Timothy A. Cook, Supriya Chakrabarti,Scott A. Budzien, "The Limb-Imaging Ionospheric and Thermospheric Extreme-Ultraviolet Spectrograph (LITES) on the ISS," Joint American Astronomical Society/American Geophysical Union Triennial Earth-Sun Summit, meeting #1, id.109.03, April 2015, AAS (American Astronomical Society)
23) "Space Test Program – Houston 5 (STP-H5) Activation," ISS Daily Summary Report – 2/28/2017, URL: https://blogs.nasa.gov/stationreport/2017/02/28/iss-daily-summary-report-2282017/
24) "SpaceX cargo ship arrives at space station," Space Daily, Feb. 23, 2017, URL: http://www.spacedaily.com/reports/SpaceX_cargo_ship-arrives_at_space_station_999.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).