mDOT (miniaturized Distributed Occulter Telescope)
Astronomy and Telescopes
mDOT (miniaturized Distributed Occulter Telescope)
In the quest for Earth-like planets and extraterrestrial life, we’ve found thousands of exoplanets orbiting stars other than our sun. The issue is that most of these planets have been detected using indirect methods. Similar to how a person can’t look at anything too close to the sun, current telescopes can’t observe potential Earth-like planets because they are too close to the stars they orbit, which are about 10 billion times brighter than the planets that surround them. 1)
Simone D'Amico’s Space Rendezvous Laboratory at Stanford is working on a two-satellite system, called mDOT, to image objects near distant stars. Much like the moon in a solar eclipse, one spacecraft would block the light from the star, allowing the other to observe objects near that star. “With indirect measurements, you can detect objects near a star and figure out their orbit period and distance from the star,” said D’Amico, whose lab is working on this eclipsing system. “This is all important information, but with direct observation you could characterize the chemical composition of the planet and potentially observe signs of biological activity – life.”
Proposed observatories capable of imaging Earth-like planets require a starshade tens of meters in diameter separated from the telescope by a distance equal to multiple Earth diameters, and the formation would have to be deployed beyond Earth orbit. Altogether, this mission would cost billions of dollars. Instead of sending a pricey, untested system into space, D’Amico’s lab, in collaboration with exoplanet expert Bruce Macintosh, professor of physics, has created a smaller version of this formation, likely to cost millions rather than billions. The primary objective of the mDOT mission is to provide a low-cost flight demonstration of starshade technology to increase the confidence of the scientific community in the capabilities of a full-scale observatory. Prof. Bruce Macintosh, also at Stanford University, is the PI of the science mission.
Overview
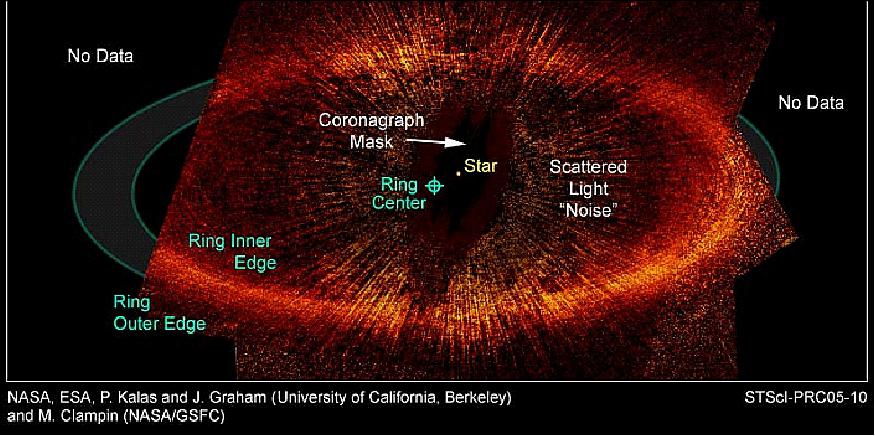
The mDOT science mission is conducted by Stanford University and NASA Ames Research Center under contract from the NASA Mission Directorate. The objective is to provide unprecedented detection and direct measurements of brightness of extrasolar dust disks at short visible to ultraviolet wavelengths. The baseline mission will observe over 15 targets using a starshade for high-contrast imaging, blocking the target star with a specially shaped free-flying occulter to allow nearby objects to be detected. 2) 3) 4)
mDOT consists of an occulter-smallsat (actually a minisatellite of 246 kg, 192 W) and a telescope-cubesat (6U, 12 kg, 40 W) launched together as a secondary payload into a sun-synchronous low Earth orbit (98º inclination, local time of the ascending node of noon/midnight, 600 km mean altitude). During nominal operations, the telescope images the vicinity of a target star with unprecedented sensitivity in the near-ultraviolet spectrum from within the deep shadow produced by the starshade.
This will allow unprecedented direct measurements of the brightness of extrasolar dust disks at short visible to ultraviolet wavelengths. Dust from asteroids and comets is a crucial component of other solar systems, tracing the presence of planets while also potentially hiding earthlike planets from mid-sized future space imaging missions. mDOT has three primary science objectives. First, it will be capable of providing B-band photometry of known young massive debris disks detected at longer wavelengths, providing color information to constrain particle sizes. Second, it will attempt to resolve scattered light from disks so far only detected through thermal emission. Finally, it will search for zodiacal dust analogs around nearby stars at a sensitivity level of 5-10 times the solar dust density. mDOT will also serve as a technology demonstrator of starshade techniques for future probe and flagship exoplanet missions and for autonomous formation-flying of small satellites as enabler of entirely new classes of low-cost, high-impact distributed space telescopes.
The nominal science plan includes 15 relevant target stars which are directly imaged up to 10 times each for a cumulative exposure time of maximum 50 minutes per target over a period of 1.1 years. The optical system consists of a 3 m-diameter starshade at a distance of 500 km from a 10 cm-aperture telescope during observations. The starshade is designed to provide a contrast of 10-7 or better in the B-band (360-520 nm) within a shadow 30 cm in diameter and 10 km in length. The telescope uses a tip-tilt mirror to achieve 0.2 arcsecond image stabilization for diffraction-limited imagery.
The formation is equipped with a precise relative navigation system that uses differential carrier-phase GNSS (Global Navigation Satellite System) measurements to achieve centimeter-level relative navigation in realtime. The occulter-smallsat is precisely and autonomously controlled to keep the telescope-cubesat within the deepest part of the shadow using a set of eleven 5N green-propellant thrusters with a total delta-v capacity of 940 m/s. The relative orbit is selected to minimize the delta-v cost of observations by ensuring that the formation is aligned in the cross-track direction.

Mission Requirements
The mDOT mission consists of an autonomous formation in sun-synchronous low Earth orbit (600 km altitude, 98º, noon/midnight local time of the ascending node). The spacecraft are launched together as a single secondary payload compatible with the ESPA [EELV (Evolved Expendable Launch Vehicle) Secondary Payload Adapter] Grande ring for a total mission lifetime of 1.1 years. The telescope-cubesat is later deployed from the occulter-smallsat as discussed in the following sections. It is noted that the mission concept is compatible with LTAN (Local Time of the Ascending Node) other than noon/midnight as long as one of the nodes of the spacecraft orbits is in eclipse. This corresponds to LTAN in the range of 9 AM/9 PM-3 PM/3 AM.
A subset of the MTM (Mission Traceability Matrix) is provided in Table 1. As a basic systems engineering tool, the MTM provides a logical flow from mission functional objectives through mission design requirements, spacecraft and platform requirements to operational requirements. The driving requirement for mDOT is the ability for the occulter-smallsat to maintain its relative position with respect to the telescope-cubesat to within ± 10 cm perpendicular to the line-of-sight during observations. Thanks to this alignment constraint, the telescope will stay in the deep shadow casted by the starshade and provide direct measurements of brightness of extrasolar dust disks in the near-ultraviolet spectrum.
Mission Functional Requirements | Mission Design Requirements |
Optical contrast of 10-7 | A starshade shall cast a starlight shadow on an observer telescope orbiting in controlled formation and aligned with the target star. |
Inner working angle <1arcsec | Baseline separation between spacecraft shall be 500 km in cross-track direction with science spectrum of interest of 360-520 nm. |
SNR (Signal-to-Noise Ratio) >10 | The telescope shall be able to image dust disks with a surface brightness of 21 mag/arcsec2. |
Cumulative exposure 5-50 minutes | The formation relative motion shall be controlled during target star observation to within ±10 cm lateral (perpendicular to line-of-sight) and to within ±5 km longitudinal (along line-of-sight). |
Stability of image 0.2 arcsec | Telescope camera shall avoid point spread function smearing due to pointing errors and jitter. |
Targets within ±10º of nominal | The absolute and relative orbits must be selected to ensure that the propulsion system(s) can support the observation of at least 15 science targets. The formation shall align with different targets through passive or active means. |
Payloads
The mDOT mission includes two payloads: a telescope hosted on the cubesat and a starshade hosted on the smallsat.
Telescope
The telescope instrument has been designed to meet a resolution of 1.1 arcsec or better at 400 nm wavelength, with a FOV (Field of View) larger than 1º. To reduce costs, a search was conducted for off-the-shelf space telescopes with flight heritage that can be repurposed for the mDOT mission and can fit in a 4U volume including the cameras and guiding instrumentation. Planet Labs offered to make available the design of their telescope for the mDOT mission. 5) The telescope has an aperture of 9.2 cm resulting in a resolution of 1.09 arcsec, and FoV >1º. Figure 3 shows a simplified schematic version of the telescope. Table 2 lists the key system parameters.
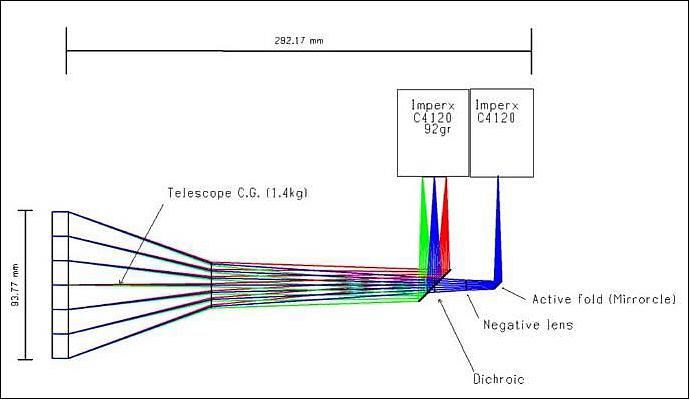
The telescope uses two identical Imperx Cheetah C4120 cameras with 3.45 µm pixels. The first one, or guiding camera, will sample the FOV and serve as a high-precision star tracker. The second camera will observe the target and will have a negative lens to reach Nyquist sampling. The light will be separated using a dichroic. In this way the guider camera observes wavelengths above 520 nm and the science camera observes wavelengths below 520 nm. Both cameras will observe the entire FOV but with different plate scale, band, and exposure times. The camera can read out the entire sensor in 12 bit at 14 Hz, and it has a global shutter with internal and external control that allows reading out without smearing the image. As a result, no mechanical shutter is needed. A tip/tilt Mirrorcle S6180 mirror (of Mirrorcle Technologies Inc) and a piezo actuated mount for the dichroic are used to stabilize the image in the focal plane and avoid smearing due to attitude pointing error. The guiding camera will image background stars with an average of 2.1 stars of apparent magnitude 8 and 8.1 stars with apparent magnitude 9. The pointing information from the background stars will be used to drive the Mirrorcle mirror (active fold) in front of the science camera to stabilize down to 0.2 arcsec2.
Telescope | Parameter |
Aperture | 9.2 cm |
Effective F number | 9 |
Focal length | 70 cm |
Mass | 1400 gram |
HFOV | 1.484º |
Camera | Parameter |
Pixel size | 3.45 µm |
Pixel count | 4112 pixels |
Mass | 91.8 gram |
FOV | 1.2º |
Mass | Parameter |
Telescope | 1400 gram |
Cameras | 184 gram |
Optics | 70 gram |
Mounts | 140 gram |
Harnesses | 179 gram |
Total mass | 1973 gram |
In addition, the cubesat attitude determination and control system can receive pointing information from the payload in order to improve the native spacecraft pointing, reducing the stroke and speed of corrections in the active fold. In regular operation each camera consumes 2.6 W. A heat pipe connected to the cubesat radiator is necessary to maintain the camera and its detector at ambient temperature.
Starshade
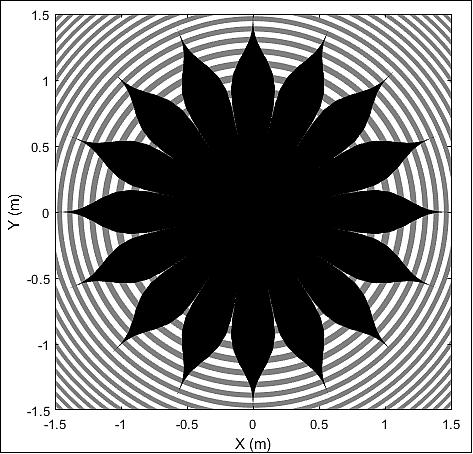
The starshade payload is designed to meet an optical contrast of 10-7 or better between 360 and 520 nm and an inner working angle of 0.6 arcsec. The starshade design is also subject to constraints to ensure that it is realizable and compatible with the ESPA Grande ring and the mission operation concept (see dedicated sections). Using conventional starshade scaling relations with a desired Fresnel number of 10 in the bandwidth of interest, the designed starshade is 3 m in diameter and requires a separation of 500±5 km from the telescope to achieve the required contrast. 6) The starshade includes a 1m-diameter central deck mounted to the spacecraft bus and 16 petals each 1m in length. The petal shapes are computed by solving a variant of Vanderbei’s optimization problem that maximizes the depth of the shadow produced by the starshade in a specified volume and bandpass (Ref. 6). 7) There is a gap of 0.5mm between adjacent petals and the petal tips are 1mm-wide to ensure that the design can be manufactured using conventional techniques. Key parameters of the starshade are listed in Table 3.
Starshade | Parameter |
Diameter | 3 m |
Deck diameter | 1 m |
Petal length | 1 m |
Petal gap width | 0.5 mm |
Petal tip width | 1 mm |
Total mass | 23.2 kg |
Because the combined starshade and telescope must produce an optical contrast of 10-7 or better, it is necessary to ensure that the starshade is accurately manufactured and deployed. Collaborators at JPL developed a manufacturing and deployment error budget using the same model used for Exo-S and other full-scale starshades. 8) Detailed specifications are omitted here for brevity. Due to the relaxed contrast requirement as compared to full-scale starshades for exoplanet imaging (which require contrast of 10-10 or better), the mDOT starshade has more relaxed manufacturing and deployment tolerances. Specifically, the critical error mode (oscillations in the petal shape) has a tolerance of 0.1mm, which is an order of magnitude larger than the tolerance for full-scale starshades (which call for a 10 µm tolerance). 9) Due to its small size, the mDOT starshade can be constructed with fewer components, making it easier to satisfy these tolerances. The nominal shape of the mDOT’s starshade is depicted in Figure 3. To satisfy the volume constraints of the ESPA Grande ring, each petal is attached to a hinge that is folded along the body of the spacecraft bus at launch. More details on the ESPA Grande envelope and design elements that ensure compatibility are described in dedicated sections.
Mission Concept
Mission operations for mDOT are divided into six phases: 1) launch; 2) occulter-smallsat deployment and commissioning; 3) telescope-cubesat deployment and commissioning; 4) formation acquisition; 5) science; and 6) decommissioning.
Table 4 lists the major events that the mDOT spacecraft would experience during each of these phases of the mission life cycle. The state of the formation during each of these phases is illustrated in Figure 4. Advancing to the next mission phase requires that all activities associated with the previous mission phase have been performed and satisfied. Phase duration is an estimation based on the number and complexity of events that need to be executed during the phase. A detailed description of each phase is provided in the following subsections.
Phases | Duration | Events |
1 | < 1day | - Stowed occulter-smallsat is carried into sun-synchronous orbit attached to ESPA Grande. |
2 | 2 weeks | - ESPA Grande releases occulter-smallsat into sun-synchronous orbit. |
3 | 1 week | - Occulter-smallsat ejects telescope-cubesat in cross-track direction per ground command. |
4 | 4 weeks | - Occulter-smallsat maneuvers to achieve 500km cross-track separation from telescope-cubesat through a difference in right ascension of the ascending node. |
5 | 11 | - At least 15 target stars are identified, their observations scheduled, number of revisits established, observation durations estimated. |
6 | 1 week | - Occulter-smallsat is commanded to fire its thrusters to reduce its velocity for gradual reentry. |
Launch
At launch, the 6U telescope-cubesat will be stowed inside the 6U ISIS DuoPack cubesat Deployer onboard the occulter-smallsat, integrating the mDOT secondary payload. The mDOT payload attaches to an ESPA Grande launch adapter for ridesharing with a primary payload for launch to a sun-synchronous orbit. Both spacecraft are stowed with inhibited battery power and radio transmissions.
Occulter-smallsat deployment and commissioning: Once ejected from the ESPA Grande, the occulter-smallsat power subsystem is activated by the release mechanism, which in turn provides stand-by power to the other subsystems. The smallsat remains in stowed configuration and may experience tumbling while it develops some distance from the stage. Note that the spacecraft is fully charged prior to integration, and the partial battery charge is sufficient for this short segment of the mission. After an elapsed time of about two minutes, the occulter-smallsat deploys the starshade petals, fully exposing the star trackers, sun sensors, and the thrusters to space. The deployment is a one-time event. After confirmation of starshade deployment and alignment verification, the motor is shut down for the remainder of the mission. The attitude determination and control system (ADCS) performs position and attitude determination. If the spacecraft is tumbling, the ADCS issues reaction wheel-based attitude control commands to de-tumble the spacecraft. Once the spacecraft has attained 3-axis stability, the occulter-smallsat orients the body-mounted solar panels toward the sun.
The spacecraft communicates with the KSAT network of Ground Stations (the baselined NASA Near Earth Network asset for this study) via S-band to downlink its orbit and health status. Ground operators evaluate the data received and uplink updated spacecraft commands. The uplinked commands are stored in the spacecraft on-board computer memory for execution at specified times or conditions.
Ground communication is a scheduled event and can occur only when the spacecraft have a line-of-sight to the ground station. The occulter-smallsat performs check-out tests by executing a series of commands to verify that all subsystems are performing per specification, including data transfer and communication to the ground as a part of the commissioning process. Successful demonstration of these verification tests, including its ability to (at a later time) communicate with the free-flying telescope-cubesat and to perform maneuvers, completes the commissioning process. The commissioning phase includes the calibration of the propulsion system on the occulter-microssatellite.

Telescope-cubesat deployment and commissioning: After the mission control center has confirmed successful commissioning of the occulter-smallsat, it schedules the command sequence which will deploy the telescope-cubesat mainly in cross-track direction. Immediately after exiting the 6U dispenser, the telescope-cubesat generates power from its body-mounted solar panels. The deployable solar arrays are released after an elapsed time to minimize re-contact risk with the occulter-smallsat. After the ADCS has stabilized the spacecraft and battery top-off is complete, the telescope-cubesat conducts vehicle checkout to verify the functionalities of the subsystems. The telescope payload assembly, which includes its control electronics, camera, and the Thermal Electric Cooler (TEC), will perform a series of tests to verify that its science instruments are performing as specified. In addition, the telescope-cubesat performs crosslink communication with the occulter-smallsat by sending and receiving data at 220 kbit/s (i.e., maximum radio capability) in S-band. Through ground command, the telescope-cubesat will conduct target pointing to determine its pointing control accuracy.
Formation acquisition: After successful deployment of the telescope-cubesat, the occulter-smallsat performs a sequence of cross-track maneuvers such that after four weeks the two spacecraft build a cross-track separation of 500 km at the nodes through a difference in right ascension of the ascending node. During this acquisition phase, both spacecraft conduct crosslink communication tests to verify their S-band connectivity. Specifically, the occulter-smallsat receives raw GNSS measurements and navigation data from the telescope-cubesat, and the occulter-smallsat transmits its computed thruster firing times and durations to the telescope-cubesat in parallel. Additionally, the ground segment downloads captured images from the telescope and provides high-level guidance commands to both spacecraft to verify that the formation can align with a specified target with the required ±10 cm accuracy. Successful demonstration of crosslink communication and formation alignment at the nominal separation certify that both spacecraft are ready to proceed to the nominal science phase.
Science: The majority of the mission lifetime is spent in the science phase, where target star observations are conducted while the spacecraft are in eclipse (Figure 5). Science phase operations are divided into observation sequences and formation reconfigurations. Each observation sequence consists of a set of target star observations which are up to five minutes in duration and centered at the ascending or descending node (depending on LTAN). The number and duration of these observations is pre-computed and uploaded to the formation via telecommand. The planning process for each observation sequence accounts for the predicted durations of camera shutterings due to thruster firings. Between the target star observations, the occulter-smallsat performs a sequence of maneuvers to re-align the formation with the target star.
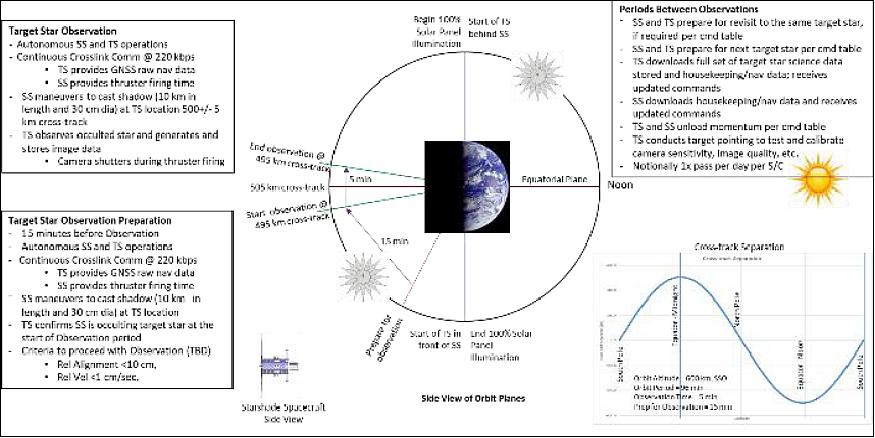
The preparation of a target star observation takes about 15 minutes before the start of each observation. During this period, precise state estimates produced by the on-board DiGiTaL (Distributed multi-GNSS Timing and Localization) navigation system are used by the occulter-smallsat for precise formation alignment acquisition. 10) The deep shadow is 500 km from the starshade along the line-of-sight (LOS), is 30 cm in diameter (perpendicular to the LOS), and is 10 km long (along the LOS). Additionally, the reaction wheels on the telescope-cubesat are used to align the boresight of the telescope with the target star and stabilize the attitude so that the tip/tilt mirror can stabilize the image in the science instrument.
During a target star observation, the telescope-cubesat continues transmitting raw GNSS measurements and navigation data to the occulter-smallsat for accurate relative navigation. The occulter-smallsat uses the state estimates from DiGiTaL to plan maneuvers using the radial and tangential thrusters to keep the telescope within the shadow produced by the starshade (Ref. 10). The starshade primarily maneuvers in the radial direction to counteract the relative acceleration perpendicular to the LOS between the spacecraft, thereby keeping the telescope inside the 30 cm diameter shadow. In parallel, the occulter-smallsat sends its computed thruster firing times to the telescope-cubesat for camera shuttering. This is required to avoid interference of plume flashes during observations.
At the conclusion of an observation sequence, the occulter-smallsat performs autonomous reconfiguration maneuvers to acquire the next scheduled target star in the command table. During these periods, the spacecraft download science and navigation data to the ground, de-saturate the reaction wheels using the magnetorquer rods, and conduct periodic camera calibrations. The process for preparing, conducting, and exiting target observations is repeated for each target star. The mDOT is expected to observe at least 15 target stars during its mission life of 1.1 years. There is no driving science data latency requirement, so science data collection is opportunistically scheduled with KSAT, notionally at the conclusion of each observation sequence.
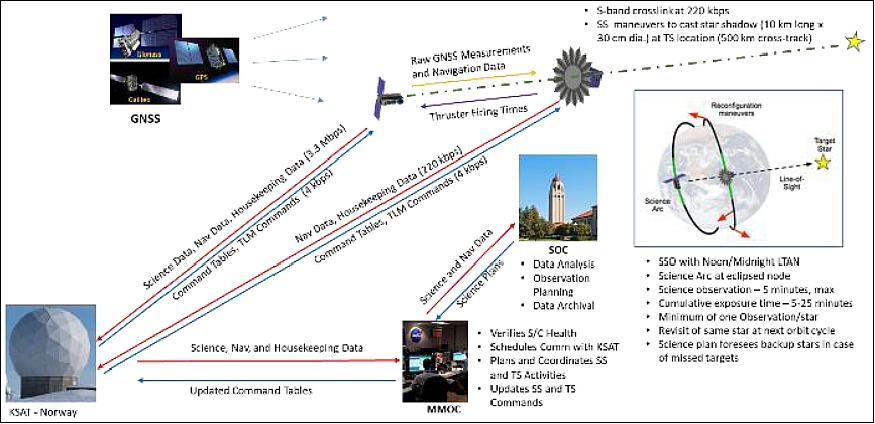
Figure 7 illustrates the mDOT mission architecture. All activities performed by the spacecraft are planned and coordinated by the NASA’s Multi-Mission Operations Center (MMOC), with inputs from the Science Operations Center (SOC), by uploading updated command tables to both spacecraft. The spacecraft execute these commands autonomously until the MMOC intervenes or uploads new command tables. Both spacecraft receive GNSS signals from GPS, GLONASS, and Galileo constellations to generate their raw measurements and navigation data. The KSAT ground station in Norway serves as a link between the spacecraft and MMOC. Ground communication to downlink data and uplink updated commands is a coordinated event and is performed one spacecraft at a time. Stored image data and spacecraft health status data are transmitted to the Ground at 3.3 Mbit/s in S-band.
Decommissioning: At the end of the mission, ground control will issue final commands to the spacecraft. The telescope-cubesat is commanded to orient its solar panels in the velocity direction and the occulter-smallsat is commanded to orient the starshade in the velocity direction to maximize the effects of atmospheric drag, causing a gradual reentry. The occulter-smallsat is also commanded to perform a sequence of maneuvers once per orbit opposite to the velocity direction until the remaining propellant is depleted. This will decrease the perigee altitude of the spacecraft orbit, accelerating its reentry into the atmosphere. Both spacecraft are expected to burn in the atmosphere well before 25 years.
Orbit Design
The absolute orbit of the mDOT mission is sun-synchronous (98º inclination) with LTAN between 9AM-3PM or 9PM-3AM. This orbit was selected to ensure that one of the nodes is always in earth’s shadow. Observations are performed at this node to ensure that the starshade is not illuminated by sunlight or earth albedo during observations, thereby minimizing the noise in images collected by the camera. Sun-synchronous orbits are also desirable for a wide range of earth observation missions, providing many launch opportunities. The nominal altitude of the orbit is 600 km to minimize the effects of differential drag on the formation while still allowing passive de-orbit within 25 years if the spacecraft maximize their area in the velocity direction at decommissioning. The requirements and nominal parameters for the orbit are provided in Table 5.
Requirement | Limits | Nominal |
Altitude | ≥500 km | 600 km |
Eccentricity | <0.02 | 0.001 |
Science mission duration | ≥1 year | 1.1 year |
LTAN | 9AM-3PM or 9PM-3AM | 12 AM |
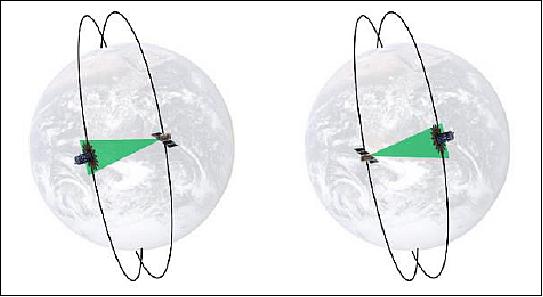
It was demonstrated by the authors that the ΔV cost of observing a target star using a formation in Earth’s orbit can be reduced by only performing maneuvers to counteract the relative acceleration perpendicular to the LOS during observations, allowing the inter-spacecraft separation to passively drift. 11) 12) The shadow produced by the starshade is long enough (10 km) to enable observations up to 5 minutes in duration in low Earth orbit. The delta-v cost can be further reduced by ensuring that the formation is aligned primarily in the positive or negative cross-track direction when observations are performed such that the starshade and telescope orbits have equal semi-major axes. To maximize the number of targets mDOT can observe, the formation alignment is allowed to deviate by up to 10º in the (anti-) along-track direction during observations (see green cone in Figure 8). While increasing the separation in the along-track direction increases the delta-v cost of observing a target, this effect is mitigated by properly selecting the number and duration of observations4. Using this approach, the formation can be aligned with a science target with a specified right ascension and a declination in the range of -18º to +2º (Figure 8, left) or -2º to +18º (Figure 8, right) at any time, depending on the sign of the cross-track separation at the node in eclipse.
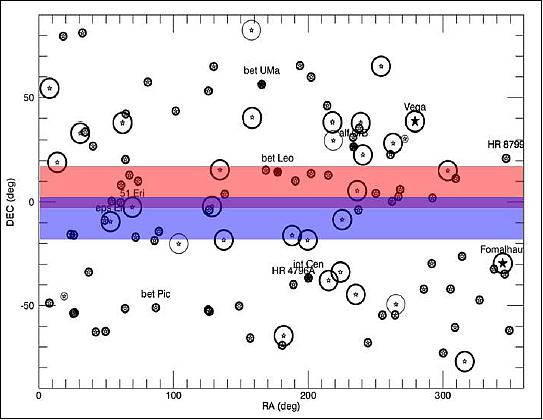
Since the RAAN (Right Ascension of the Ascending Node) of the absolute orbit drifts over time due to Earth’s oblateness, the formation passively aligns with science targets with different right ascension. Accordingly, the delta-v cost of aligning the formation with a different target primarily depends on the difference in declination. With this in mind, Figure 9 shows the portions of the sky that can be imaged in science plans focusing on the northern hemisphere (red) and southern hemisphere (blue) including known targets of scientific interest.
There are sets of target stars in both the northern and southern hemispheres that satisfy the science objectives of the mission. It is hereafter assumed that the baseline mission uses the northern hemisphere science plan for simplicity. To minimize the delta-v cost of the mission, each target is observed when the pointing vector is as close as possible to the (anti-)cross-track direction, which also ensures that the orbits of both spacecraft have the same semi-major axis. It follows that the relative orbit of the formation includes a 4º offset in RAAN with small differences in the mean anomaly and eccentricity vector. During each observation of a target, the inter-spacecraft separation passively drifts between 495 km and 505 km.
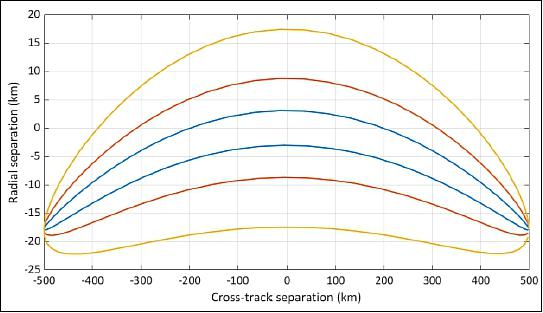
Next, it is necessary to consider the safety of the formation. Passive collision avoidance can be ensured using the well-known relative eccentricity/inclination (e/i) vector separation technique. 13) Using this method, a user-specified separation in the plane perpendicular to the flight direction can be set by constraining the relative eccentricity and inclination vectors to be (anti-)parallel. Because the relative inclination vector (which includes the difference in RAAN) is so large for mDOT, it is evident that the point of closest approach is over the poles. Accordingly, it is sufficient to demonstrate that the magnitude of the relative eccentricity vector is larger than the expected difference in the semi-major axis of the orbits (≤2 km including combined effects of maneuvers and precession of the absolute orbit over a 10-orbit observation sequence). To ensure a minimum separation of 1km, which is deemed sufficient to ensure passive safety in the event of an extended loss of maneuvering capability, it is necessary to ensure that the angle between the pointing vector to the target and the cross-track direction is at least 0.35º.
Figure 10 shows the evolution of the relative position in the radial/cross-track plane over one orbit for formations configured to observe targets with 0.35º (blue), 0.5º (red) and 1º (yellow) offsets in the (anti-)flight direction. It is evident from this plot that the minimum separation is 3 km for the target with a 0.35º offset, which is sufficient to guarantee a 1 km separation with the worst-case difference in the semi-major axis of the orbits. Increasing the along-track offset monotonically increases the minimum separation between the spacecraft.
A conservative Δv budget for the baseline mDOT mission is provided in Table 6 including a margin of 25%. It was validated by conducting high-fidelity simulations of the mission for the science targets described in Table 7. These simulations include 3σ navigation errors, dynamics modeling errors, and maneuver execution errors consistent with the performance of the DiGiTaL navigation system and foreseen green-propellant thrusters (ECAPS, Ref. 10). 14) 15) The control logic used in these simulations is described in detail in a previous work by the authors (Ref. 11).
Allocation | Δv (m/s) | Burn duration (minutes) |
Formation acquisition | 275 | 107 |
Science phase | 400 | 133 |
Safe modes | 25 | 8 |
De-orbit | 50 | 16 |
Margin (25%) | 190 | - |
Total Δv | 940 | 264 |
Target star | Observations (m/s) | Reconfigurations | |
Same target | Different target | ||
alf CMi | 11.6 | 3.7 | 13.2 |
16Zet Hya | 24.4 | 22.1 | 33.2 |
70 The Leo | 13.0 | 3.3 | 17.0 |
Beta Leo | 3.2 | 0.0 | 15.4 |
HD 107146 | 34.8 | 21.2 | 28.7 |
50 Gam Aql | 34.4 | 21.2 | 7.6 |
alpha Aql | 4.8 | 1.8 | 14.1 |
HD 15115 | 4.0 | 0.6 | 10.5 |
29 Tau | 4.3 | 0.8 | 8.0 |
1 Ori | 8.7 | 5.7 | 3.2 |
HD 32297 | 8.1 | 6.0 | 4.7 |
24 Gam Ori | 1.8 | 0.0 | 5.1 |
58 Alp Ori | 0.9 | 0.0 | - |
Flight System Capabilities
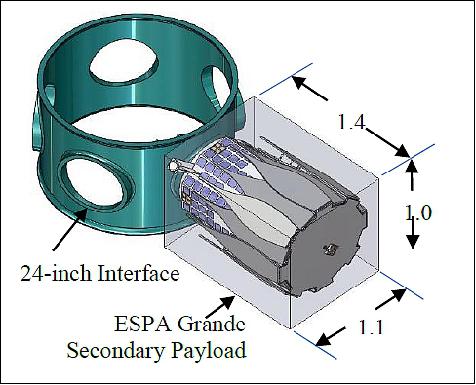
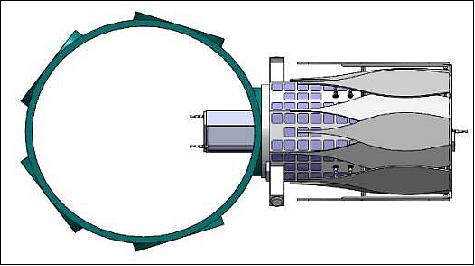
mDOT requires an ESPA Grande support structure on a launch vehicle with a 5 m fairing or larger. The mDOT team will need to coordinate with the launch vehicle provider to ensure the mDOT design meets the launch environment of the selected launch vehicle, but the team expects that the Atlas V, Delta IV, or Falcon-9 could be configured to satisfy the necessary launch envelope. With the exception of the telescope-cubesat dispenser and rear thruster protruding through the interface ring and into the interior of the ESPA Grande, the occulter-smallsat conforms to the ESPA Grande secondary payload envelope of 1.0 m high x 1.1 m wide x 1.4 m long, measured from the ESPA Grande 24-inch ring interface. The 1.4 m length limit corresponds to a 5 m fairing. The ESPA User’s Guide (November 2018) states that auxiliary payloads are allowed to take advantage of the ESPA internal volume, if this volume is not occupied by a propulsion system or other mission element. 16)
Assuming an ESPA with no internal elements, mDOT would be allocated a “pie slice” of the internal volume. The allocation of the ESPA internal volume should be confirmed by the launch vehicle provider and/or the mission integrator once the mission integrated payload stack is defined. As the design is refined, optimization can include recessing the 6U dispenser partially into the occulter-smallsat body to reduce the protrusion into the ESPA internal volume. This would shift the propellant tank location away from the ESPA interface, so management of the center of mass location would be the limiting factor. In the event that ESPA internal volume is not made available to auxiliary payloads, the size of the propellant tank would need to be reduced to make room for the dispenser within the body, with a corresponding impact to propellant budget and science observation time.
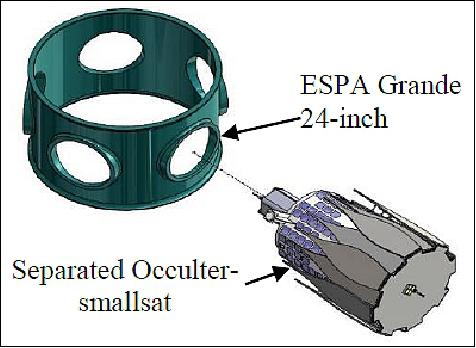
The occulter-smallsat will be deployed from the ESPA Grande using a 24-inch separation ring (Planetary Systems Inc. Lightband or similar). The current ESPA allocation for mDOT mass is 320 kg. The ESPA 24-inch port is rated for up to 465 kg when the center of mass is located within 50.8 cm (20 inches) from the ring interface. Figure 11, Figure 12, and Figure 12 illustrate the compatibility of the mDOT design with the ESPA Grande ring.
Occulter-smallsat: The occulter-smallsat consists of a small spacecraft with approximately 1.0 m x 1.4 m x 1.1 m octagonal structure which provides support to the 16-petal starshade. The starshade is 3 m in diameter with petals manufactured to within 0.1 mm pattern shape tolerance. The starshade is stowed during launch and deployed like an umbrella by a motor after the occulter-smallsat has been ejected from the ESPA Grande. The telescope-cubesat is carried inside a 6U ISIS DuoPack cubesat Deployer mounted at the opposite end of the occulter-smallsat. Eleven (11) 5N green propellant thrusters are arranged in pairs, plus one single on the starshade, to provide radial, tangential, and normal velocity control independent from spacecraft attitude.
Subsystem | Components | TRL |
Payload | Starshade hub with 16 deployable petals; Starshade deployment motor; Snubbers (from Tendeg) | 5 |
Structure | Aluminum Primary Structure; ISIS DuoPack cubesat Deployer; Planetary Systems Standard Lightband of 24 inch diameter | 7-9 |
C&DH | Tyvak SBC with Tyvak Linux BSP Operating System; ARM Cortex A8+ DSP Coprocessor; 512 MB RAM; NAND-Flash 8 GB SD-card | 9 |
Electrical Power | Body-mounted UTJ Solar Cells (from Spectrolab); LG INR 18650HG2 300mAh Battery Cells (32 cells); EPS Stack with BioSentinel legacy | 9 |
Communications | Two (2x) Cesium SDR; S-band with Tx/Rx Module (TRM) – Primary and Redundant; 4x S-band patch antennas (2 for crosslink, 2 for downlink/TT&C) – Primary and redundant | 5-6 |
ADCS | BCT Nano Star Trackers (2x); BCT MICD Coarse Sun Sensors (2x); BCT RW4 Reaction Wheels (4x); Microcosm MT-140 Magnetorquer Rods (3x); BCT XACT Gen3 ADCS Processor | 9 |
GNC | Guidance, Navigation, and Control software, including DiGiTaL (Ref. 10), developed by Stanford) | 5 |
Thermal | Combination of active and passive control with allocation for heaters, MLI, and temperature sensors | 8 |
Propulsion | 11x 5N HPGP Thrusters (from Bradford, ECAPS); LMP-103S Green Propellant; 77.9L (propellant load volume); Propellant Tank from ATK | 5-9 |
Flight software | cFE/cFS, Blue Canyon (XACT) | 8 |
Two pairs of thrusters are used for radial velocity adjustment, two pairs for tangential, and a pair and single thrusters for normal velocity adjustments. Placement and orientation of the radial and tangential thrusters were selected to minimize plume impingement onto the petals while also minimizing rotational torques due to the shifting of spacecraft center of mass over time. Solar cells and six Cesium patch antennas populate the spacecraft body panels. One crosslink patch antenna is mounted on the starshade hub and one on the opposite panel. Two vertical structures pointing in opposite directions, designed to be out of view of the telescope-cubesat during observations, provide support to the GNSS antennas. Occulter-smallsat avionics, including propellant tanks and batteries, are located as opposite to the starshade in the spacecraft as possible. This helps to balance the spacecraft (center of mass near geometrical center) as well as to minimize plume impingement of radial and tangential thrusters on the petal edges.
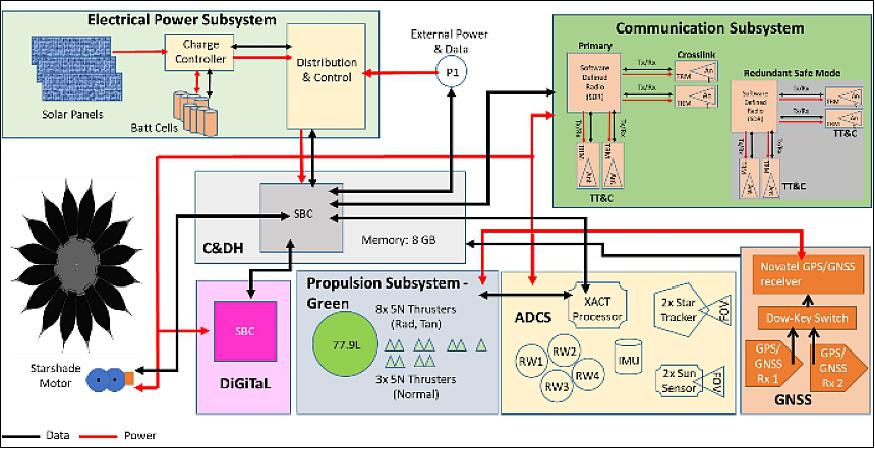
Table 8 provides a summary of the major subsystem components of the occulter-smallsat, including the assessed TRL (Technological Readiness Level). When components of the subsystem have different TRL, a range of TRL is provided. In particular, the payload, communication, GNC, and propulsion subsystems have components with TRL<6 which need a dedicated technology maturation plan for mission implementation. Figure 14 shows the functional block diagram of the occulter-smallsat. Table 9 lists the key technical flight system margins for the occulter-smallsat, excluding the telescope-cubesat. The margin is computed by subtracting CBE (Current Best Estimate) from allocation and dividing by allocation.
Resource | CBE | Allocation | Margin |
Dry mass | 138 kg | - | - |
Propellant mass | 96 kg | - | - |
Lift-off mass (incl. telescope-cubesat) | 246 kg | 320 kg | 23% |
Solar Power - EOL | 177 W | 37 W | >100% |
Battery Power | 345.6 W | 187 W | 85% |
Battery DOD | 19.2% | 80% | 60.8% |
Relative Position Nav Accuracy | 2 cm (3D) | 6 cm (R, T); 1 km N | 66%, >100% |
Relative Position Ctrl Accuracy (max) | 10 cm (R, T) | 15 cm (R, T) | 33% |
Pointing Control Accuracy | 0.002º | 1.00º | >100% |
Pointing Knowledge Accuracy | 0.002º | 1.00º | >100% |
Slew Rate | 0.125 º/s | >0.063 º/s | 98% |
The occulter-smallsat is sized for mounting to an ESPA Grande. The main components of the spacecraft are shown in Figure 15 and Figure 16. The main body of the spacecraft is an octagonal structure, 70cm across. This is large enough to mount on a 24-inch separation ring while small enough to allow the 3m-diameter starshade structure to fold over the octagonal body without exceeding the ESPA Grande volume constraints. The spacecraft body and internal support structure are constructed primarily of aluminum (subject to change with refined thermal analysis). Each face of the octagonal body is covered with 35 solar cells. Once the starshade is deployed, the body-mounted panels are exposed to the sun and are sufficient to meet power needs.
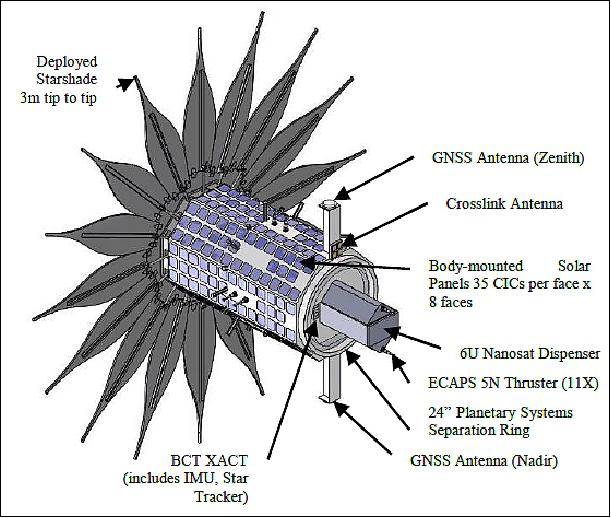
Pairs of 5 N thrusters are mounted on the ± axes to allow for 3-axis translational control. The face of the starshade is the only surface with a single 5 N thruster. The thrusters are located such that a net thrust is provided through the center of mass (for the deployed configuration). The 91-liter fuel tank (77.9 L fill capacity) is located along the axis of the octagonal body. The tank carries 96 kg of available ADN green propellant (LMP-103S) at launch, of which 81 kg is usable for Δv. The 6U NanoSat dispenser is mounted opposite of the starshade and protrudes through the 24-inch separation ring. A pair of 5 N thrusters straddle the dispenser. The location of the dispenser along the main axis of the spacecraft ensures that release of the telescope-cubesat will have minimal impact on the center of mass of the occulter-smallsat and will minimize tumble at release.
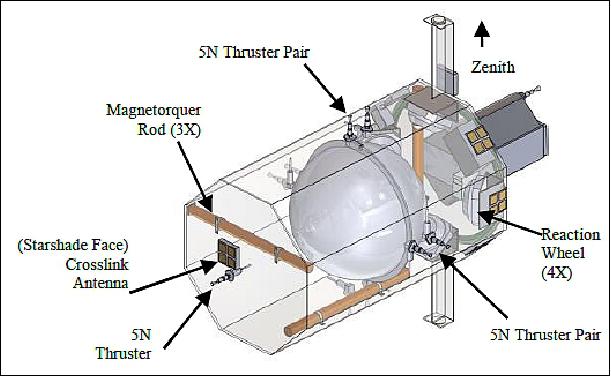
Two star trackers are positioned with orthogonal fields of view. One looks along the main spacecraft axis. The dispenser shades the star tracker from the thruster flare. This star tracker could also be located on the face of the starshade with similar performance. The other star tracker is mounted in one of the upper octagonal faces. Four reaction wheels are located within the spacecraft against the 24-inch interface plate. They are oriented along tetrahedral axes, providing 3-axis attitude control with redundancy. Three 68 cm-long magnetorquer rods are placed orthogonally as available volume allows. The radios, power system, and computer are located close to the interface plate and positioned to keep the center of mass within 2 cm of the body axis. The center of mass is within 51 cm of the 24-inch ESPA interface in the launch configuration. Patch antennas are located on the face of the starshade, on the dispenser end of the occulter-smallsat, and on the two lower octagonal faces, 45º off nadir. Four additional patch antennas are mounted to four of the unoccupied faces and connected to a separate Cesium radio for redundancy. Two GNSS antennas are located on extension arms in the zenith and nadir directions. The extensions are intended to maximize the antennae’s field of view (allowing for 120º FoV) unobstructed by the large starshade.
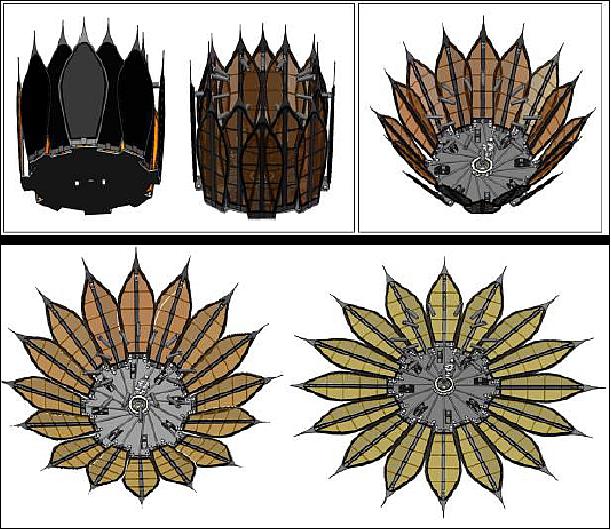
The starshade design consists of 16 deployable precision petals which are mounted onto a structural base deck. The deck structure is the mounting plate for the petal hinges, the petal central deployer mechanism, and the precision structural interface to the aft end of the bus. When the petals are stowed, they fold up parallel to the bus central axis. The petals are seated in cup/slotted cone devices onto 16 posts with brackets that are integrated into the bus and restrained. A resettable launch restraint/release device is mounted to the end of the post. Releasing this device disengages the petals so that they can be deployed to their final position by the deck mounted deployment mechanism rotating its linkage arms that connect this mechanism to the individual petals. The petals are rotated down and locked out in this position through tapered pin engagements at the hub. Details of the starshade’s overall mechanical design, including deck, petals, hub, linkage arm, and petal launch restraint are available but omitted for brevity. Figure 17 shows the starshade designed for mDOT by Tendeg.
The propulsion system must be selected to satisfy five requirements. First, the thrust must be sufficient to keep the formation aligned with each of the target stars. Second, the duty cycle of the thrusters should be kept under 50% to minimize the duration of camera shuttering during observations. For the baseline science plan, it was found that a thrust of 10N is sufficient to control the formation with short thruster firings (<5 seconds). Third, the propulsion system should have the largest possible specific impulse to meet the delta-v requirement for the mission with reasonable propellant mass (<100 kg). This results in a minimum specific impulse of 220 s. Fourth, the starshade spacecraft must be able to generate thrust in any direction without performing an attitude maneuver to ensure that the formation can controlled during observations with the starshade facing the target star. Finally, the propulsion system must generate thrusts that act through the center of mass of the spacecraft to minimize the momentum accumulated in the reaction wheels during observations. To meet these requirements, the selected propulsion system consists of a set of eleven 5 N high-performance green propellant thrusters from Bradford ECAPS (Ref. 14) and (Ref. 15). These thrusters have a specific impulsive of 240 s, and a density 24% higher than hydrazine.
The thrusters are positioned to provide torque-free translation maneuvers at all times during the mission accounting for the shifts in the center of mass due to propellant expenditure. The thrusters are aligned in the positive/negative direction of each of the principal axes. Reaction wheels can compensate for undesired torque generated from misalignment of thruster nozzles and provide for control in the event of a malfunctioning nozzle pair. The thruster arrangement provides 10 N thrust per axis in the plane perpendicular to the line of sight during observations, meeting the thrust requirement for the mission. The sizing of ADCS hardware is based on the mission design, spacecraft body design, sun-synchronous orbit environments, and corresponding constants (e.g. sunlit area, gravity constant, magnetic constant, solar reflection factor, drag coefficients, atmospheric density). The ADCS system components are provided in Table 10.
Component | Vendor | Mass |
Star tracker (x2) | BCT star tracker | 0.35 kg |
Coarse Sun sensor (x2) | BCT MICD, Strip Assembly | 0.008 kg |
Reaction wheels (x4) | BCT RW4 | 12.0 kg |
Magnetorquer Rod (x3) | Microcosm MT-140 | 15.9 kg |
The occulter-smallsat employs one communication system for both crosslink and telemetry, tracking and command (TT&C), as shown in Figure 19. It also includes a dedicated redundant system for emergency and safe mode TT&C based on the same hardware solution as the primary system. The nominal system works in S-Band and provides both TT&C, emergency and safe mode TT&C, and crosslink communication with the telescope-cubesat to exchange raw GNSS measurements, thruster firing times, and auxiliary data. The telescope-cubesat employs the same hardware solution for the crosslink and science data downlink, while the bus provides TT&C and redundant science data downlink capability. mDOT plans to use the KSAT ground station network (NEN) and the SG1 dish is the baseline for the link analysis. Initial analysis show that mDOT closes both the TT&C and Science data RF downlink with >> 6 dB. The crosslink between the spacecraft closes with 5.5 dB at max expected distance of 510 km. In addition, the mDOT team also performed preliminary link analysis using the KSATLite ground stations, which consists of 3.7 m dishes (versus the 11.3 m of SG1) colocated with traditional KSAT dishes. While these results indicate that KSATLite assets may meet mDOT requirements, KSATLite is not integrated with NASA NEN (Near Earth Network), therefore a future trade will be performed to assess the use of KSAT vs KSATLite assets based upon cost, performance, and operational complexity.
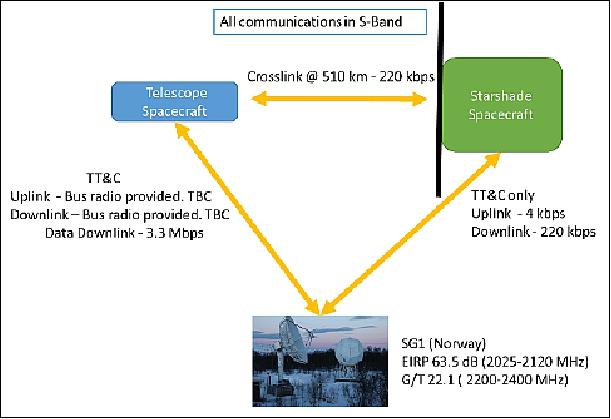
From the MTM (Mission Traceability Matrix), the data volume of science data that needs to be downloaded after each observation varies from 10 MB to 600 MB. Initial analysis shows that a 3.3 Mbit/s data rate allows all science data generated in one observation to be downlinked to a ground station in 1 to 5 passes. mDOT has ~ 14 daily available passes with SG1. The bandwidth occupancy is estimated to be within the 5 MHz bandwidth limit.
The EPS (Electrical Power Subsystem) was analyzed by operational mode. The most demanding mode is found to be during a science observation. The remaining modes were assessed to be less demanding than observations. For analysis, the LTAN noon/midnight orbit was assessed, which is a worst case for power considerations. For this mode the spacecraft uses body-mounted solar cells capable of generating at least 192 W (assuming Peak Power Tracking) of power at end-of-life (EOL); 345 Wh of battery storage capacity at EOL is provided. Spectrolab provides solar cells which will be installed onto the exterior of the spacecraft body, 35 cells per surface (8 sides - 280 total cells). This solution allows for pointing in all directions while still receiving adequate power while in sun. The panels are equipped with UTJ solar cells with proven 28.3% efficiency. The occulter-smallsat uses 32 x LG INR 18650HG2 3000 mAh Li-ion batteries, with four series and eight parallel connectivity. The maximum DOD (Depth-of-Discharge) is 20% due to the LEO orbit selected, as the orbit cycle count is < 6,500 for the entire 1.1-year mission; future refinement of the number of charge/discharge cycles could allow for a less-conservative DOD.
The EPS boards leverage the design used on BioSentinel, which is a mission of NASA Ames Research Center mission scheduled to launch in 2020 on Orion / EM-1 (Exploration Mission-1). 17) The power management card controls solar arrays, monitors over current, and manages battery usage. The power distribution card is a switch board that controls power switching, DC-DC conversion, and power regulation, among others. The EPS must supply 12 V bus voltage and 3.3 V of regulated voltage. Additionally, each of the batteries in series has an individual management card. For the current battery design, there are eight parallel battery strings; thus, eight battery management cards.
Formation Guidance, Navigation, Control (GN&C): A precise relative navigation system is required to: 1) estimate the absolute orbit of the occulter-smallsat, and 2) estimate the relative position and velocity of the telescope-cubesat with respect to the occulter-smallsat. These functionalities can be accomplished by the Stanford’s DiGiTaL system which includes a hardware layer (GNSS receiver, antennas, RF peripherals) and a software layer (Ref. 10).
The baseline receiver is from the Novatel OEM-7 dual frequency GNSS receiver series. This is one of the most well-known receivers for cubesats and smallsats such as CanX-2 and E-POP. Novatel OEM 7 offers dual frequency tracking capability to estimate/mitigate the ionospheric path delays for long-baseline precise positioning in the LEO environment. This sensor provides carrier-phase measurements with millimeter-level noise, enabling estimation and filtering algorithms to provide relative state estimates with 2 cm accuracy (3D, rms).
To ensure continuity and robustness of GNSS measurements, the both spacecraft are equipped with two GNSS antennas mounted on extension arms on the zenith and nadir faces of the spacecraft bus to ensure than each antenna has an unobstructed 120º FoV. Only the most zenith-pointing antenna is used for navigation purposes at any time. The antenna selection is done through an RF switch based on attitude information provided by the spacecraft bus. This allows support of ADCS safe mode and tumbling operations.
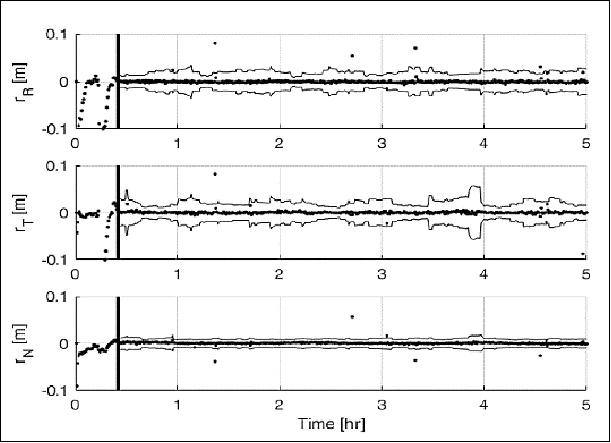
Because the absolute orbit knowledge requirements are benign, the absolute orbit is estimated directly from the position and velocity solutions from the GNSS receiver. Instead, the pseudocode and carrier-phase measurements from both spacecraft (transmitted using the crosslink) are used by the DiGiTaL software to compute relative state estimates in real time with accuracy of 2 cm or better (3D, rms). This is accomplished using differential carrier-phase techniques similar to those used on the PRISMA mission.18) While carrier-phase measurements have millimeter-level noise, they are subject to an integer offset in the number of cycles. This offset must be computed for each measurement using integer ambiguity resolution (IAR). To meet the relative navigation requirements for mDOT, this must be accomplished onboard in real-time. To minimize the computation effort required for this task, DiGiTaL computes wide-line measurement types by fusing carrier-phase measurements from different frequencies and constellations (e.g. Galileo, GLONASS, Beidou). These measurement types benefit from common error cancellation (e.g. ionosphere offset) and reduce the search space for IAR. Figure 19 shows the state estimation error and formal 3σ covariance for the filter after activation of IAR as obtained through hardware-in-the-loop tests at Stanford (Ref. 10).
The absolute and relative state estimates provided by DiGiTaL are used by the GN&C algorithms to compute the translational maneuvers required to control the formation. Formation control is divided into two distinct modes: 1) observation mode, and 2) reconfiguration mode. Transitions between these modes are deterministically computed from the properties of observation sequences uploaded from the ground.
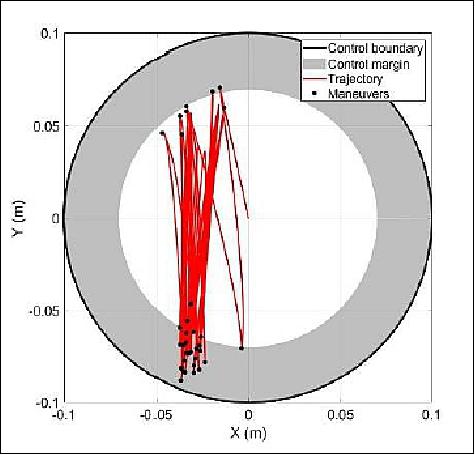
In observation mode, a closed-form state-space control logic is employed that simultaneously minimizes the number of executed maneuvers and minimizes propellant consumption. The number of maneuvers is minimized by planning the maneuvers such that the relative position in the plane perpendicular to the LOS crosses the full diameter of the shadow. These maneuvers act in direct opposition to the relative acceleration perpendicular to the LOS, ensuring that the formation is efficiently controlled. An example trajectory of the relative position in the plane perpendicular to the LOS is shown in Figure 20. This trajectory corresponds to the first in a sequence of ten observations of a target, resulting in a large relative acceleration in the plane perpendicular to the LOS and a cumulative delta-v cost of 3 m/s for the five-minute observation. This trajectory includes 36 maneuvers with burn times ranging from 0.2 to 3.3 seconds. Because the maneuvers are planned in closed-form, this control logic runs in less than 1 s on the Tyvak processor baselined for the occulter-smallsat.
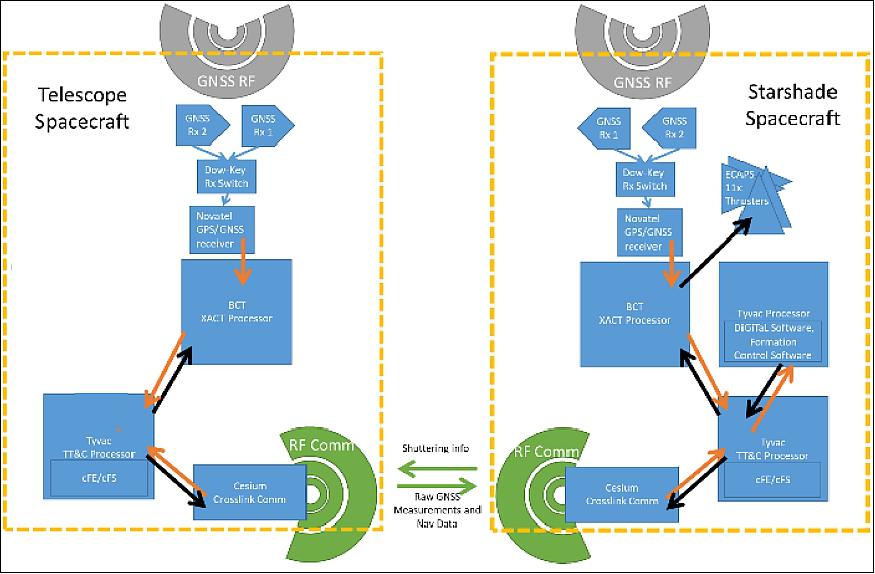
In reconfiguration mode, a stochastic model predictive controller is used to plan a maneuver sequence that ensures that the formation is aligned with the target at the start of the next observation. This control logic is the same for reconfigurations to re-align with the same target or to align the formation with a different target. At each update step (10 minutes or slower), the state estimate and covariance are propagated to the start of the next observation by numerical integration of the equations of motion including dominant perturbations in LEO and any previously planned maneuvers. If the desired state is within the 3σ covariance bound of the propagated state or the entire 3σ covariance bound is within the control window, the previous maneuver plan is kept and planned maneuvers are executed until the next update. If neither of these conditions is satisfied, the maneuver plan is updated using a recently developed globally optimal impulsive maneuver planning algorithm. 19) 20) This is accomplished by first propagating the orbits of both spacecraft without any maneuvers. Next, the desired state of the occulter-smallsat is computed by adding the nominal relative state at the start of an observation to the propagated orbit of the telescope-cubesat. Finally, a maneuver sequence that drives the occulter-smallsat from the propagated state to the desired state is computed using the numerical maneuver planning algorithm17,18. Preliminary tests have found that this algorithm can be executed in less than 10s on the Tyvak processor baselined for occulter-smallsat. To enable observations to be performed over consecutive orbits, maneuver planning and execution are run autonomously on-board. Navigation and control data is downloaded to the ground in regular intervals for post-facto analysis. A block diagram of the communication architecture for GN&C purposes is shown in Figure 21.
Telescope-cubesat: The telescope-cubesat is a 6U CubeSat that is carried and deployed by the occulter-smallsat. Blue Canyon Technologies (BCT) was contacted by the study team and provided a cost estimate for a LEO spacecraft bus which meets the top level mission requirements. Several options are available including the 21ASM1950 (BCT structure with simplified avionics), the BCT 6U RAVAN bus (with simplified assembly), or the FlexBus 6U platform which all meet the mDOT mission needs. In particular, the requirements on the telescope-cubesat bus are well within reasonable limits for current LEO cubesat capabilities, and so procurement of a suitable bus is considered a low-risk item by the study team.
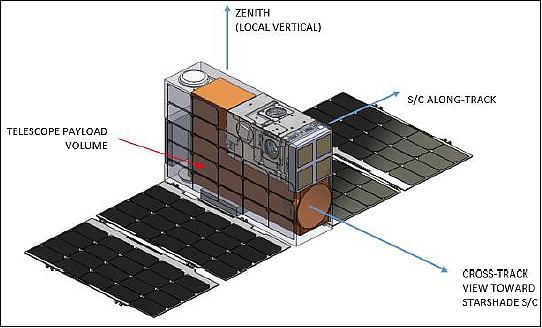
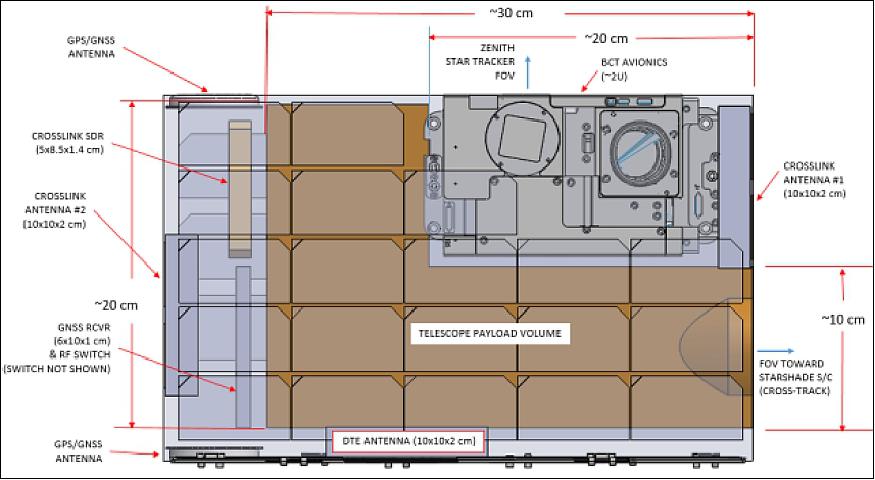
The telescope-cubesat has no propulsion system, thus it relies on its ADCS reaction wheels for attitude control and the magnetorquers for wheel desaturation. The telescope assembly occupies 4U volume in an L-shape configuration (Figure 22 and Figure 23) which leaves a 2U volume for housing spacecraft avionics. The solar cells are body-mounted on the spacecraft sun-facing panels and are augmented by deployable solar panels. Crosslink patch antennas are mounted on the aperture side and on the anti-aperture side. A patch antenna is mounted on the Earth-facing panel for DTE using NEN (KSAT). Similar to the occulter-smallsat, the telescope-cubesat is equipped with the DiGiTaL system for precise relative orbit determination. Data volume sufficient for three target stars is provided, including 600 MB per observation and two revisits per target, although data is intended to be downlinked after all target observations.
Figure 22 and Figure 23 show the mechanical layout of the telescope-cubesat, while Table 11 and Table 12 list the flight system resources and major subsystem components. The overall system TRL has been assessed at 7-8 after accounting for payload interface modifications.
Resource | Value | Note |
Volume for telescope | 4U in L-shape | Figure 21 and Figure 22 |
DiGiTaL antenna | 2x GNSS antennas, 1x GNSS receiver, 1 RF switch | GNSS antennas on Zenith and Nadir |
Crosslink radio system | 1 SDR, 3 antennas | SDR: 5 x 8.5 x 1.4 cm, Each Antenna: 10 x 10 x 2 cm |
Payload power | 45 W in eclipse (15 minutes/orbit), 10 W daylight | Duty Cycle for Science Observations |
Pointing accuracy | ±0.45º, all axes | Capability of bus is ~0.007º |
Design life | 18 months | Nominal mission duration 1.1 years |
Orbit | 600km altitude, 98º inclination | LTAN: noon-midnight |
Propulsion | None needed |
|
Science data volume | 4 GB | Half of an 8GB SD card for science data |
Subsystem | Components | TRL |
Payload | Telescope assembly with 2 cameras, tip/tilt mirror, and TEC | 7-8 |
Structure | 6U from BCT; Telescope assembly to occupy 4U in L-shape form | |
C&DH | Tyvak SBC with Tyvak Linux BSP Operating System; ARM Cortex A8+ DSP Coprocessor; 512 MB RAM; NAND-Flash 8 GB SD-card | |
Electrical Power | BCT EPS | |
Communications | Cesium SDR S-band with Tx/Rx Module (TRM); 3 S-band patch antennas (2 for crosslink, 1 for downlink); Xilinx FPGA host | |
ADCS | BCT XACT | |
Propulsion | None | |
Flight Software | BCT, DiGiTaL |
The 6U telescope-cubesat plans to use a Cesium S-band system to support TT&C and science data downlink with KSAT, downlink to the occulter-smallsat of GNSS data and uplink from the occulter-smallsat of camera shuttering information. The Cesium telecommunication system uses the same hardware configuration for both spacecraft. The bus TT&C capabilities provide redundant science downlink capabilities with KSAT.
Technology Gaps and Risks
System Engineering: mDOT’s Project System Engineer (PSE) serves as the technical authority through all mission phases and chairs the Systems Engineering Team (SET). The SET manages the SE effort, including developing requirements, interface control documents (ICDs), verification and validation plan, tracking technical performance measures (TPMs), and performing trade studies and analysis. Payload-to-spacecraft ICDs are defined in Phase A, allowing independent testing of the instrument and spacecraft prior to integration. The Spacecraft-to-host ICD is defined early in Phase B to establish critical interfaces with the host spacecraft. Lower-level ICDs are developed as needed between critical hardware and software elements to ensure compatibility prior to integration. The mDOT’s spacecraft team implements the spacecraft design using off-the-shelf components and systems wherever possible. The mission environments, both external and internal, are characterized to ensure that adequate design margins are incorporated for radiation effects, electrical system grounding and noise, and electromagnetic control for both on-orbit and launch environments.
mDOT’s SET implements the mission science requirements identified in the science traceability matrix (STM). The instrument and mission requirements listed in the STM flow down to requirements on flight and ground segments as shown in the MTM (Table 1). The mission requirements in the MTM are used to derive mission system specifications and ICDs, particularly the payload-to-spacecraft ICDs. The Dynamic Object Oriented Requirement System (DOORS) tool is used for requirements tracking, flow-down, documentation, and verification. The instrument concept proposed by mDOT is modeled to validate that the technical performance meet the science objectives. Science constraints on the operations concept have been included to ensure that the science operations produce the required measurements. Throughout the formulation, implementation and development phases, the mission architecture, operations concept, and models will be cross validated to ensure consistency in meeting mission requirements.
Risk Assessment: The mDOT’s risk matrix is illustrated in Table 13. It provides a snapshot of the main identified risks including a quantification of their likelihood and impact to the overall mission.
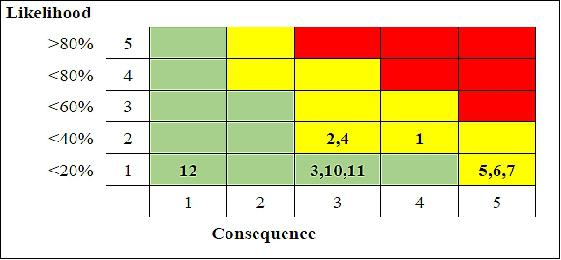
A summary of the risk assessment is provided in the following bullet list where risks IDs refer to Table 13.
1) Starshade Deployment Failure. Given that the starshade mechanism is a new design, there is a probability of incomplete deployment, adversely impacting science capability. Mitigations: Design a test system for deployment in 1g-environment to facilitate verification of the flight configuration. If the motor senses partial deployment, it stops and switches to a standby mode and waits for ground command for corrective actions.
2) DiGiTaL/GN&C Computer Failure. If the DiGiTaL/GN&C computer goes into Safe Mode (locks up) for more than 5 minutes, estimation and control accuracies are degraded, which can result in missed or shorter observations. Mitigations: Include contingencies in science plan that re-allocate Δv to other targets after control is re-established. Include redundant on-board computer.
3) Propellant Quantity. Since orbit maneuvers are required to align the formation with each target, there is a possibility that the loaded propellant may get depleted early, which can result in not achieving all mission objectives. Mitigations: Maximize propellant tank size and fill to capacity. Reduce occulter-smallsat mass. Include contingencies in science plan to account for deviations from predicted propellant expenditure.
4) Solar Array/ Instrument Contamination by Thruster Plume. Given that condensation of exhaust products or heat effects forms on solar arrays and instrument surfaces, there is a possibility that solar array efficiency and sensor readings will be degraded, which can result in reduced mission life and compromised mission data. Mitigations: Conduct plume impingement analysis. Investigate different propellant options and pick solution with acceptable thrust performance and minimal contamination impact. If possible, orient sensitive solar array and instrument surfaces away from thrusters.
5) Telescope-cubesat Deployment Failure. Given that the telescope-cubesat is deployed from a 6U Dispenser, there is a possibility that it will not deploy or will re-contact with the occulter-smallsat, which can result in mission loss. Mitigations: Verification of Dispenser using mass simulator during integration and testing. Verification of final installation. Ensure through analysis that Dispenser system provides sufficient delta-v to avoid re-contact.
6) Re-contact with ESPA Grande. Given that the occulter-smallsat will be ejected from the ESPA Grande, there is a possibility that the spacecraft could re-contact with the ESPA Grande, which can result in loss of mission (and orbital debris). Mitigations: Coordination with launch provider and analysis to determine appropriate wait time prior to spacecraft deployment and spacecraft power-up.
7) Conjunction/ Collision between spacecraft. Given that the minimum separation between the spacecraft occurs over the poles, there is a possibility that loss of nominal control on either spacecraft could cause a collision, resulting in loss of mission (and orbital debris). Mitigations: Exclude science targets with declinations within 0.35º of ±8º, ensuring passive collision avoidance via relative e/i-vector separation10. In the event of an extended navigation outage, the ground segment can command the occulter-smallsat to perform collision avoidance maneuvers.
8) Telescope-cubesat Orbit Decay. Given that the telescope-cubesat has no propulsion system, there’s a possibility that the spacecraft may remain in orbit beyond 25 years after launch, resulting in non-compliance with the NASA Handbook for Limiting Orbital Debris (and International Standards). Mitigations: At the end of mission life, orient the spacecraft such that its largest surface area faces into the velocity vector to increase atmospheric drag forces.
9) Rideshare Opportunity. Given that the occulter-smallsat volume protrudes into the interior of the ESPA Grande ring, there is a possibility that a rideshare opportunity will not be available, resulting in a schedule slip while awaiting a suitable launch accommodation. Mitigations: Early negotiation and coordination with the launch services provider to ensure early identification of options will minimize overall impacts on project schedule.
10) Starshade tolerance. Given that the starshade must be accurately manufactured (0.1mm edge shape tolerance) and deployed, there is a possibility it cannot maintain the required tolerance under operational environment, which can result in image data contamination. Mitigations: Extreme care in selecting materials, machining of parts, and testing of assembly under similar operational environment.
11) Plume Impingement. Given that plume impingement on the starshade occurs during an observation, there is a possibility that exhaust gas degrades the shape of the petals over the mission, which can result in image data contamination. Mitigations: Tilt the R/T thrusters away from the starshade and use the reaction wheels to compensate for the thruster-induced torque. Design the occulter-smallsat to have its center of mass and R/T thrusters as far away from the starshade as possible.
12) Cesium SDR & TRM Hardware at TRL 6. Given that the Cesium radio hardware is not flight qualified yet, there is a possibility that it will not pass qualification testing before it is required for integration and testing. Mitigations: Keep updates on incoming qualification testing (planned for May 2019) and conduct trade study for alternative communication systems.
Technology Gaps: Most subsystems required for mDOT are currently at TRL 7 or higher (see Table 8 and Table 12 listing the spacecraft components). It is believed that all subsystems at lower TRL can be matured to TRL 6 or higher within two years through qualification testing on-ground and flight demonstrations on upcoming missions. Current status and technology development plans for subsystems below TRL 6 are summarized in Table 14.
Component | TRL (mDOT) | Development need |
Starshade Deployment Assembly | 5 | On-ground demonstration of starshade manufacture and deployment with acceptable errors as from tolerance analysis |
Telescope Payload Assembly | 5 | On-ground validation of telescope payload performance. |
ECAPS Thrusters | 5 | Validation of thruster performance in orbit |
DiGiTaL/GNC | 5 | Hardware-in-the-loop demonstration of autonomous precise relative navigation and control |
Tx/Rx Module with Patch Antennas | 5 | On-ground qualification tests |
The individual components are addressed in the following.
• Starshade Deployment Assembly. The deployment assembly (hub, motor, linkages, and hinges for petals) is a novel design developed by Tendeg specifically for the mDOT mission. While the materials and components for this design are similar to those used in full-scale starshade designs, an on-ground test campaign is required to verify that the proposed design can be manufactured and deployed with acceptable errors. 21)
• Telescope Payload Assembly. The telescope payload is a modified version of the Planet Labs PS2 telescope, which now has extensive flight heritage (>100 units on orbit) in the Dove constellation. The modifications include introduction of a Mirrorcle S6180 mirror and secondary detector for image stabilization and a TEC for thermal control. A laboratory prototype of a two-sage attitude control system has been developed and tested at Stanford University. 22) Further on-ground qualification testing is needed as part of mDOT to raise the TRL of the telescope payload to 6.
• ECAPS Thrusters. The propulsion system uses HPGP 5N thrusters developed by Bradford ECAPS. The 5N thruster is based on a 1N version with LEO flight heritage from the Skysat 3-7 and PRISMA missions. Development and qualification of the 5N thrusters is coupled with the qualification program for the HPGP 22N thrusters. The first flight-like HPGP 22N thruster was designed and built to substantiate the thruster design, build process, and testing to NASA GSFC PACE mission requirements. This test program was intended to bring the thruster TRL level from 5 to 6. The HPGP 5N and 22N thruster designs will be updated to incorporate the lessons learned during 22N thruster testing (completed in 2017). The HPGP 5N thruster is scheduled to be tested in 2018-2019.23) Successful completion of this test campaign should bring the 5N thruster TRL level to 6.
• Tx/Rx Module with Patch Antennas. The telecommunication system uses a Tx/Rx module and Patch Antennas developed by Cesium, the same manufacturer of the SDR. While the SDR is already at TRL 6, the Tx/Rx module is currently at TRL 5, progressing to TRL 6 upon completion of thermal testing of the existing high-fidelity engineering model. The Patch Antennas are currently at TRL 4, with Cesium in the process of starting manufacturing of the patch antenna’s engineering model. The entire telecommunication system (SDR, Tx/Rx Module and Patch Antennas) is planned to complete qualification testing (TRL 8) by end of summer 2019.
• DiGiTaL and Formation-Flying Algorithms. The DiGiTaL navigation and formation-flying algorithms are under development at the Stanford’s Space Rendezvous Laboratory under two NASA SSTP contracts in collaboration with NASA Ames and GSFC. DiGiTaL uses differential carrier-phase GNSS techniques similar to those deployed on the PRISMA mission which achieved 10cm (3D, rms) relative positioning accuracies at separations from 2 m to 50 km (Ref. 18). However, DiGiTaL aims at centimeter-level relative positioning accuracy (3D, rms) in real-time through improved integer ambiguity resolution algorithms at separations up to 505 km. The mDOT mission requires a formation at 500 km separation to autonomously maintain alignment with an inertial target with centimeter-level accuracy and conduct formation reconfigurations to re-align the formation for repeated observations of the same target. To date, these capabilities have only been partially flown and verified in space. The Stanford’s Space Rendezvous Laboratory has experience with these algorithms from the flown GRACE, TanDEM-X, PRISMA, BIROS missions. Improved algorithms are currently in development as part of the Autonomous Nanosatellite Swarming using Radio-Frequency and Optical Navigation (ANS) SSTP contract in collaboration with NASA Ames Research Center21. 24) It is expected that the TRL of DiGiTaL and formation-flying algorithms will be raised to 7 within two years, through the current Stanford’s research and development program and scheduled flight demonstrations on the Starling1 mission, which is scheduled for launch in 2020. 25)
In summary, a pre-phase A system design is presented of the miniaturized Distributed Occulter Telescope (mDOT) conducted by Stanford University and NASA Ames Research Center under contract from the NASA Mission Directorate. mDOT will provide unprecedented detection and direct measurements of brightness of extrasolar dust disks at short visible to ultraviolet wavelengths. The baseline mission will observe over 15 targets using a starshade for high-contrast imaging, blocking the target star with a specially shaped free-flying occulter to allow nearby objects to be detected. mDOT operates on a much smaller scale than flagship NASA missions, with an autonomous formation of two small satellites in sun-synchronous low Earth orbit. An occulter-smallsat (246 kg, 192 W) carries a precisely manufactured 3 m-diameter starshade and a telescope-cubesat (6U, 12 kg, 40 W) carries a 10 cm-diameter telescope. The satellites are launched combined as a secondary payload for a total mission lifetime of 1.1 years. After launch, the occulter-smallsat ejects the telescope-cubesat and maneuvers to establish the desired relative orbit, leaving the spacecraft at slightly different longitudes of ascending node. Relative eccentricity and inclination vector separation provides the baseline for scientific observations at the equator (500 km) and a minimum safe distance perpendicular to the flight direction at all times (>1 km). The starshade suppresses the light of the target star by 10-7 or more.
During a science pass, high-ISP green propellant thrusters on the occulter-smallsat maintain the formation, while differential GNSS is used for cm-accurate relative navigation. Earth’s oblateness perturbations are used to precess the orbits and acquire the science targets over the mission lifetime at minimal propellant cost. The presented point design closes with healthy technical margins on all resources and proves the feasibility of a small starshade mission in Earth orbit. At the same time, the study identifies technical risks and technology gaps that need to be addressed to pave the way for an actual mission. More importantly, the starshade deployment assembly, the telescope payload assembly, and the guidance, navigation, and control software need to be matured to TRL 6. The mDOT mission addresses key NASA science objectives and provides the unique opportunity to mature starshade techniques for future exoplanet missions.
References
1) ”Stanford professor creates an artificial eclipse to image extrasolar planets,” Stanford, 7 August 2017, URL: https://news.stanford.edu/2017/08/07/artificial-eclipse-imaging-extrasolar-planets/
2) Simone D’Amico, Adam Koenig, Bruce Macintosh, David Mauro, ”System Design of the Miniaturized Distributed Occulter/Telescope (mDOT) Science Mission,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-IV-08, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4380&context=smallsat
3) Bruce Macintosh (PI), Simone D’Amico (Co-PI), Adam Koenig, Alex Madurowicz, David Mauro, Gregg Freebury, ”Miniature Distributed Occulter/Telescope (mDOT), a small starshade mission in Earth orbit, ” this paper was provided by Simone D'Amico.
4) Jan Kolmas, Payman Banazadeh, Adam W. Koenig, Sinone D'Amico, Bruce Maacintosh, ”System Design of a Miniaturized Distributed Occulter/Telescope for Direct Imaging of Star Vicinity,” IEEE, 2016, URL: https://damicos.people.stanford.edu/sites/g/files
/sbiybj2226/f/ieeeaerospace2016_kolmasbanazadehkoenigdamicomacintosh.pdf
5) Christopher R. Boshuizen, James Mason, Pete Klupar, Shannon Spanhake, “Results from the Planet Labs Flock Constellation,” Proceedings of the 28th AIAA/USU Conference on Small Satellites, Logan, UT, August 2014, paper: SSC14-I-1, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=3016&context=smallsat
6) Tiffany Glassman, Amy S. Lo, Jonathan Arenberg, Webster Cash, and Charley Noecker, “Starshade Scaling Relations,” Proceedings of the SPIE Optical Engineering + Applications Conference, San Diego, CA, Volume 7440, August 2009, URL: https://www.researchgate.net/profile
/Jonathan_Arenberg/publication/252071200_Starshade_scaling_relations/links
/54635fd00cf2c0c6aec4914a/Starshade-scaling-relations.pdf?origin=publication_detail
7) Adam W. Koenig, Simone D'Amico, Bruce Macintosh, Charles J. Titus, ”A pareto-optimal characterization of miniaturized distributed occulter/telescope systems,” Proceedings of SPIE, Volume 9605, 'Techniques and Instrumentation for Detection of Exoplanets VII; 960514 (2015),' https://doi.org/10.1117/12.2187324, Event: SPIE Optical Engineering + Applications, 2015, San Diego, CA, USA
8) Stuart B. Shaklan, M. Charley Noecker, Tiffany Glassman, Amy S. Lo, Philip J. Dumont, N. Jeremy Kasdin, Eric J. Cady, Robert Vanderbei, Peter R. Lawson, “Error Budgeting and Tolerancing of Starshades for Exoplanet Detection,” Proceedings of the SPIE Astronomical Telescopes + Instrumentation Conference, San Diego, CA, June 2010, URL: https://trs.jpl.nasa.gov
/bitstream/handle/2014/44720/10-2258_A1b.pdf?sequence=1&isAllowed=y
9) Stuart B. Shaklan, Luis Marchen, Eric Cady, William Ames P. Douglas Lisman, Stefan R. Martin, Mark Thomson, Martin Regehr, ”Error budgets for the Exoplanet Starshade (Exo-S) probe-class mission study,” Proceedings of SPIE, Volume 9605, 'Techniques and Instrumentation for Detection of Exoplanets VII; 96050Z, 16 September 2015, https://doi.org/10.1117/12.2190384, Event: SPIE Optical Engineering + Applications, 2015, San Diego, California, United States,
10) Vincent Giralo, Simone D’Amico, ”Distributed Multi-GNSS Timing and Localization for Nanosatellites,” ION GNSS+ 2018, Miami, FL, USA, 24-28 September 2018, URL: https://damicos.people.stanford.edu/sites/g/files/sbiybj2226/f/iongnss2018_giralodamico.pdf
11) Adam W. Koenig, Bruce Macintosh and Simone D’Amico, ”Formation Design of Distributed Telescopes in Earth Orbit for Astrophysics Applications,” Journal of Spacecraft and Rockets, https://doi.org/10.2514/1.A34420, Published online24 May 2019
12) Adam W. Koenig, Simone D’Amico, Bruce Macintosh and Charles J. Titus, ”Optimal Formation Design of a Miniaturized Distributed Occulter/Telescope in Earth Orbit,” Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Vail, CO, August 2015, paper: AAS 15-799, URL: https://pdfs.semanticscholar.org/95cd/da2da3125c11d6d9ac4db542024021c79dbf.pdf
13) Simone D’Amico and Oliver Montenbruck, ”Proximity Operations of Formation-Flying Spacecraft Using an Eccentricity/Inclination Vector Separation,” Journal of Guidance, Control and Dynamics, Vol. 29, No. 3, pp: 554-563, May–June 2006, URL: https://www.dlr.de/rb/en/Portaldata/38
/Resources/dokumente/GSOC_dokumente/RB-RFT/AIAA_JGCD_06554.pdf
14) K. Anflo, G. Bergman, ”Flight demonstration of new thruster and green propellant technology on the PRISMA satellite,” Acta Astronautica, Volume 65, Issues 9–10, November–December 2009, Pages 1238-1249, https://doi.org/10.1016/j.actaastro.2009.03.056
15) Henry W. Mulkey, Andrew P. Maynard, Kjell Anflo, ”Green Propulsion Advancement and Infusion,” Proceedings of the 3AF Space Propulsion Conference, Seville, Spain, May 2018, paper: SP2018_00090, URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20180003008.pdf
16) “ESPA User’s Guide,” Moog, Inc., Space and Defense Group, November 2018, URL: https://www.moog.com/content/dam/moog/literature/sdg/space/structures/moog-espa-users-guide-datasheet.pdf
17) Matt Sorgenfrei, B. S. Lewis, ”BioSentinel: Enabling CubeSat-Scale Biological Research Beyond Low Earth Orbit,” Proceedings of the Interplanetary Small Satellite Conference, Pasadena, CA, April 2014, URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20160006683.pdf
18) SimoneD'Amicoa,Jean-SebastienArdaensa, SergioDe Florio, ”Autonomous formation flying based on GPS — PRISMA flight results,” Acta Astronautica, Volume 82, Issue 1, January 2013, Pages 69-79, https://doi.org/10.1016/j.actaastro.2012.04.033
19) Adam W. Koenig and Simone D’Amico, ”Real-Time Algorithm for Globally Optimal Impulsive Control of Linear Time-Variant Systems,” IEEE Transactions on Automatic Control, April 17, 2018, URL: https://arxiv.org/pdf/1804.06099.pdf
20) Adam W. Koenig, “Formation Design of Distributed Telescopes in Earth Orbit with Application to High Contrast Imaging,” Stanford University, PhD Thesis, 2019
21) Manan Arya, David Webb, James McGown, P. Douglas Lisman, Stuart Shaklan, S. Case Bradford, John Steeves, Evan Hilgemann, Brian Trease, Mark Thomson, Steve Warwick, Gregg Freebury, Jamie Gull, “Starshade mechanical design for the Habitable Exoplanet Imaging Mission Concept (HabEx),” Proceedings of the SPIE Optical Engineering + Applications Conference, San Diego, CA, August 2017, Volume 10400, 'Techniques and Instrumentation for Detection of Exoplanets VIII; 104001C, https://doi.org/10.1117/12.2275086
22) Connor Beierle, Andrew Norton, Bruce Macintosh, Simone D'Amico, ”Two-stage attitude control for direct imaging of exoplanets with a CubeSat telescope,” Proceedings of SPIE, Volume 10698, 'Space Telescopes and Instrumentation 2018: Optical, Infrared, and Millimeter Wave; 106981Z (2018),' https://doi.org/10.1117/12.2314233, Event: SPIE Astronomical Telescopes + Instrumentation, 2018, Austin, Texas, USA
23) Aaron Dinardi,Kjell Anflo, Pete Friedhoff, “On-Orbit Commissioning of High Performance Green Propulsion (HPGP) in the SkySat Constellation,” Proceedings of the 31st AIAA/USU Conference on Small Satellites, Logan, UT, August 2017, paper: SSC17-X-04, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3670&context=smallsat,
24) Nathan Stacey, Simone D’Amico, “Autonomous Swarming for Simultaneous Navigation and Asteroid Characterization,” Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Snowbird, UT, August 2018.
25) Hugo Sanchez, Dawn McIntosh, Howard Cannon, Craig Pires, Josh Sullivan, Simone D’Amico, Brendan O’Connor, “Starling1: Swarm Technology Demonstration,” Proceedings of the 32nd AIAA/USU Conference on Small Satellites, Logan, UT, August 2018, paper: SSC18-VII-08, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4111&context=smallsat
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).