TIMATION: GPS Predecessor Program
Initiatives and Programs
TIMATION - GPS Predecessor Program
TIMATION was a pioneering navigation test program of NCST (Naval Center for Space Technology) at NLR (Naval Research Laboratory) in Washington D. C., which started in the 1960s (a predecessor program of the follow-up GPS program). The overall objective of the TIMATION program was to demonstrate the ability to place highly accurate clocks into orbit, to advance time transfer, two-dimensional navigation, and to demonstrate technology for three-dimensional navigation. TIMATION proved that a system using a passive ranging technique, combined with highly accurate clocks, could provide the basis for a new and revolutionary navigation system with three-dimensional coverage (longitude, latitude, and altitude) throughout the world. Roger L. Easton of NRL was the principal designer of the TIMATION system. The concept the NRL explored was based on atomic clocks and ranging to a satellite. 1) 2) 3)
The TIMATION satellites represented an improvement of the preceding Transit satellite series of NRL. The third TIMATION satellite was renamed to NTS-1 (Navigation Technology Satellite-1), since it embodied the results of a parallel program called TIP (Transit Improvement Program), conducted by the US Air Force.
Spacecraft | Launch date | International S/C ID | Orbital altitude | Inclination | Eccentricity | S/C mass | Useful life |
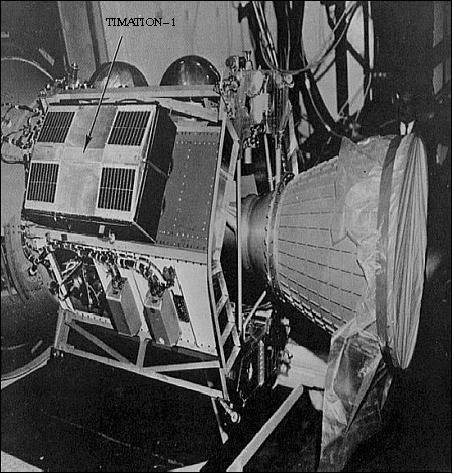
TIMATION-1 | 31.05.1967 | 1967-53F | 925 km | 70º | 0.0008 | 40 kg | 74 months |
TIMATION-2 | 30.09.1969 | 1969-82B | 925 km | 70º | 0.002 | 55 kg | 6 years |
NTS-1, TIMATION-3 | 14.07.1974 | 1974-54A | 13,800 km | 125º | 0.007 | 295 kg | 5 years |
NTS-2 | 23.06.1977 | 1977-53A | 20,200 km | 63º | 0.0004 | 431 kg | 18 months |
Background
The revolution in spaceage navigation is the consequence of the development of the US military satellite navigation system called the GPS / NAVSTAR(Global Positioning System) / (Navigation System with Timing And Ranging), developed in the 1970s whose origins started actually with the launch of Sputnik of the Soviet Union on Oct. 4, 1957. Two researchers at the JHU/APL (Johns Hopkins University/Applied Physics Laboratory) in Laurel, MD, USA, William H. Guier and George C. Weiffenbach, figured out a way to determine Sputnik's orbit simply by measuring the Doppler-induced changes in the frequency (Δf/f) of the simple radio signal that it transmitted. 4) 5) 6)
By tracking the Sputnik signal in 1957 on spacecraft overpasses, they realized the fundamental “navigation problem” which states: if the position of the satellite were accurately known, then Doppler data could tell an observer on the ground his unknown position. Hence, the concept of ranging as an aid to tracking of satellites led to the inverse idea of ranging from satellites.
This discovery caused a fierce competition in the US military services, not just between the Navy and the Air Force, but also between Navy and Navy, and the Army. After all, navigation (position finding - or getting from A to B) was a problem of strong interest and fundamental to each service. Naturally, the real competition was over DoD budgets to finance the various programs that each service started.
The strong interest of NRL in position and time determination considerably predates the launching of the first man-made satellites. The Laboratory had been active in developing clocks and timing systems for the U.S. Naval Observatory (USNO) and had been working on new radio-navigation and time-dissemination systems using all parts of the radio spectrum. These radio systems suffered from the limitations. Lower frequencies that could be transmitted over long distances were affected by the ionosphere, and higher frequencies were limited to line-of-sight. The new satellite capabilities overcame these limitations and offered new opportunities to improve both time and position accuracy. Systems of improved accuracy could then be realized that could provide worldwide coverage. New system concepts and technology for navigation and time dissemination were needed. 7) 8)
Following is a list of the various major events and developments - leading to the GPS program:
• In 1958, the US Navy funded the Transit experimental satellite radio navigation program which was designed and developed at JHU/APL to demonstrate the radio navigation technique in support of the Navy's submarine fleet. The first satellite of the Transit series was launched in 1959. The last Transit spacecraft, NOVA-2 was launched on June 16, 1988. In 1967, the Transit navigation services were made available to the general public (commercial and private users). During its 32 years of operation, the Transit Navigations System (or NNSS) provided global navigation measurements for the US Navy and for the civilian community.
The positives results of Transit were: Proof that a space system could offer excellent positioning reliability. 9)
The negative aspects of Transit were: Large gaps in coverage.
- Unavailable coverage measuring up to several hours
- To compensate, users had to interpolate (to estimate a value of a function between two known values) their positions between passes
- Users had to compensate for their velocity
- Weather conditions could disrupt the signal
- The process was slow and required a long observation time
- Only two-dimensional positioning was provided
- Transit was not efficient for the more high velocity technology (aircrafts, missiles, etc.) being developed by the military.
• In 1963, the US Air Force started to fund the design and development of the System 621B at SAMSO (Space and Missile Systems Organization) of the US Air Force at the Los Angeles AFB. The studies that led to System 621B, originated at the Aerospace Corporation in El Segundo, CA (under Ivan A. Getting). The objective was to find a 3-D radio navigation solution (latitude, longitude, and altitude) for aircraft with continuous service. The concept involved the measurement of times of arrival of radio signals transmitted from satellites whose positions were precisely known. This provided the distances to the known satellite positions—which, in turn, established the user’s position.
By 1966 the Aerospace Corporation had completed all the preliminary work and two contracts were awarded in 1967 to TRW and Hughes to develop the space-based System 621B.
By 1972, the 621B program had already demonstrated operation of a new type of satellite-ranging signal based on repeatable digital sequences and PRN (Pseudo Random Noise). The PRN code is represented by repeated sequence of binary bits ( ones and zeoes) with noiselike properties that appear to be random; however, they are generated with total predictability. The reflected pulse could be compared against the original pulse pattern using a mathematical procedure known as "correlation" to determine the exact timing.
To verify the new PRN technique, the Air Force ran a series of aircraft tests at the White Sands Proving Grounds (NM) using ground- balloon- and aircraft-carried transmitters to simulate satellites at various locations. 10)
The PRN technique had distinct advantages over other techniques:
- The technique pinpointed the positions of the aircraft to within 16 meters
- The PRN technique had the capability to reject interference noise including jamming or deliberate interference. PRN techniques allow all satellites in a constellation to transit on the same frequency, therefore a communication channel could be added permitting the user to receive data (satellite location and clock information.
The attributes of Sytem 621B were:
- Wide area or global coverage and continuous availability
- 3D and accurate velocity fixes
- The technique is useable on rapid maneuvering vehicles.
• In 1964, NRL (Naval Research Laboratory) began with the TIMATION project to explore the idea of providing both accurate position and precise time to passive terrestrial observers. (the term "passive" is used in the sense that the user listens to the satellite broadcasts and does not emit any signals). This technique required precise spaceborne clocks that could be regularly updated by a master clock on the ground to keep multiple satellites in synchronization. The satellite clocks would be linked to the user's receiving equipment by ranging signals broadcast by the satellites and from the received data the users could measure the difference between the user's clock and that in the satellite. The first TIMATION satellite was launched in 1967. 11)
Passive ranging techniques require an accurate and stable oscillator in the satellite. Such an onboard clock allowed the user to determine the length of time it took each signal to travel from the satellite to the receiver. The user then knew the distance to the satellite. - Hence, the TIMATION project concentrated on developing an improved quartz frequency standard for satellites, thereby reducing the error in the passive ranging links, and also on determining the most effective satellite constellation for providing worldwide coverage. The ranging signal technique of the TIMATION system was referred to as STR (Side Tone Ranging).
- STR was not a modulation technique but a set of CW (Continuous Wave) subcarriers space by tone frequencies.
- This technique required the user and the satellite to be phase and frequency synchronized so that precise measurement of time of transmission could be made.
- The STR concept was validated in Texas in 1964 along with the effort to build a small space qualified atomic clock.
- Airborne experiments of the system were conducted in 1965
- The TIMATION-1 satellite in 1967 demonstrated that STR was a viable ranging technique.
• In the later part of the 1960s, the US Navy, Air Force, and Army were each working independently on radionavigation systems that would provide all-weather, 24 hour coverage and accuracies that would enhance the maneuverable capability of each service. - In the meantime, JHU/APL had made technical improvements to the Transit series and wanted to upgrade the system, while NRL was pushing an expanded TIMATION system, and the Army had proposed to use its own solution, namely the SECOR (Sequential Correlation of Range) system.
• In 1968, the DoD established a tri-service steering committee called NAVSEG (Navigation Satellite Executive Committee) to coordinate the efforts of the various satellite navigation groups: the Navy’s Transit and Timation programs, the Army’s SECOR system, and the System 621B program of the Air Force. The NAVSEC spent the next several years on deciding what the specifics of a satellite navigation system should be, how many satellites should be in a constellation, what should be the proper orbital altitude of the constellation, the signal codes and the modulation techniques to be used - and what the program would eventually cost. Naturally, the decisions were made after a number of independent studies were conducted.
At about this time, the System 621B program envisioned a constellation of 20 satellites in synchronous inclined orbits, while the TIMATION program envisioned a constellation of 21 to 27 satellites in medium altitude orbits.
• In April 1973 the TIMATION program of NRL was merged with the Air Force's 621B program to form the NAVSTAR-GPS program [initially it was called DNSS (Defense Navigation Satellite System)]. The DoD designated the Air Force as the lead agency to consolidate the various satellite navigation concepts into a single DoD system. The new system was to be developed by a Joint Program Office (JPO), located at the US Air Force / Space and Missile Systems Organization (SAMSO), Los Angeles Air Force Base, and with participation of all military services. Colonel Bradford W. Parkinson, program director of the JPO (prior to his appointment he was in charge of System 621B in the Air Force Space Division in El Segundo, CA), was directed to negotiate between the services and to develop a concept that embraced the views and requirements of all services. 12) 13) 14) 15) 16)
• A consequence of this merger was that NRL’s TIMATION-3 satellite was re-designated as the Navigation Technology Satellite 1 (NTS-1) and was launched in the summer of 1974 in connection with the NAVSTAR program. NTS-1 had two atomic clocks onboard, while the earlier TIMATION satellites had carried crystal oscillator clocks to test the NRL theory.
NTS-1 tested two rubidium vapor atomic clocks and operated on two different frequencies (335 MHz and 1580 MHz) in order to improve accuracy. The atomic clocks had better frequency stability than earlier clocks, which greatly improved the prediction of spacecraft orbits (ephemerides) and would eventually extend the time required between control segment updates to GPS satellites. This pioneering work on space-qualified time standards was an important contribution to the GPS program. In fact, the last two TIMATION satellites (NTS-1 and NTS-.2) were used as prototype GPS satellites.
• By September 1973, a compromise system was evolving which combined the best features of earlier Navy and Air Force programs. The signal structure and frequencies were taken from System 621B of the Air Force. The satellite orbits were based on those proposed by the Navy's TIMATION system, but higher in altitude, providing 12 hour periods instead of the 8 hour periods. While both systems had proposed the use of spaceborne atomic clocks, only the Navy had tested this idea in orbit.
Altitude selection: Putting the satellites into LEO (Low Earth Orbit) would reduce the size and cost of the boosters required to launch them, and would also reduce the power required for the transmitters on the satellites. However, obtaining adequate coverage would demand a large number of satellites. Putting them into geosynchronous orbit would reduce the number of satellites, but it would require more powerful launchers and transmitters, and it would not provide good coverage of the polar regions. - The altitude finally chosen was a compromise: a circular orbit in MEO (Medium-altitude Earth Orbit) with an altitude of 20,200 km and a period of 12 hours. At that altitude, 17 satellites would be enough to make sure that four of them, the minimum number needed to establish a position, would always be visible from any location on the Earth's surface.
• In December 1973, DoD granted the JPO approval to proceed with the first phase of a three-phase development of the NAVSTAR GPS program. The orbital configuration approved in 1973 was a total of 24 satellites, consisting of 8 satellites plus one spare in each of three equally spaced orbital planes. The orbital alltitude was 20,200 km above Earth, corresponding to a period of revolution of 12 sidereal hours, with repeating ground traces. However, each satellite arrived over a given point four minutes earlier each day. A common orbital inclination of 63º was selected to maximize the on-orbit payload mass with launches from VAFB (Vandenberg Air Force Base), CA. This configuration ensured between 6 and 11 satellites in view at any time. 17) 18)
Note: As envisioned ten years later, the inclination was reduced to 55º and the number of planes was increased to six. The constellation would consist of 18 primary satellites, which represents the absolute minimum number of satellites required to provide continuous global coverage with at least four satellites in view at any point on the Earth. In addition, there would be 3 on-orbit spares.
The operational system, as presently deployed (1999), consists of 21 primary satellites and 3 on-orbit spares, comprising four satellites in each of six orbital planes. Each orbital plane is inclined at 55º. This constellation improves on the “18 plus 3” satellite constellation by more fully integrating the three active spares.
• The NTS-2 spacecraft (launch June 23, 1977) was a prototype for a functional GPS satellite. It led to the launch of ten (not counting a failure) "Block 1" GPS / NAVSTAR satellites, built by Rockwell International and launched in the timeframe 1978-1985.
Spacecraft
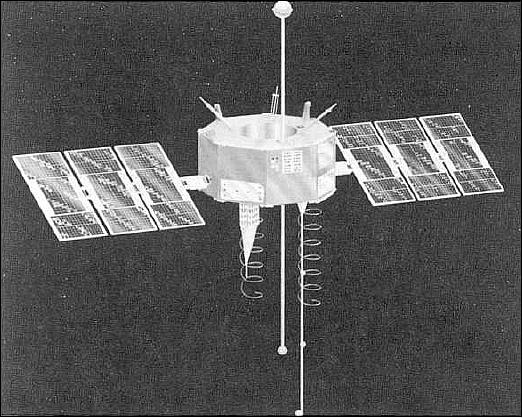
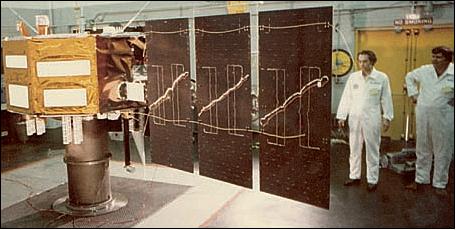
The TIMATION satellites were conceived, developed, and launched by the Naval Research Laboratory (NRL) in Washington, D. C. beginning in 1964.
A spacecraft description is not available.
Launch
The TIMATION-1 spacecraft was launched on May 31, 1967 on a Thor Agena-D vehicle from VAFB, CA.
The TIMATION-2 spacecraft was launched on August 30, 1969 on a Thor Agena-D vehicle from VAFB, CA.
Orbit: LEO (Low Earth Orbit) circular orbit, altitude = 925 km, inclination = 70º, period = 103.20 minutes.
Sensor Complement
The TIMATION-1 spacecraft carried two very stable quartz-crystal oscillators.
The TIMATION-2 spacecraft carried improved equipment (2 quartz-crystal oscillators) and a dual frequency transmitter operating at 150/400 MHz (VHF, UHF).
The satellite carried a "clock" driven by a very stable quartz-crystal oscillator operating at 5 MHz. From this signal, two carriers were coherently derived, one at 149.5 MHz and the other at 399.4 MHz. In addition. other frequencies were derived in the bands of 149.0 to 150.0 MHz and 398.9 to 399.9 MHz to provide the equivalent of nine modulation frequencies from 100 Hz to 1 MHz. 19)
The carriers were transmitted continuously to permit doppler tracking at two frequencies for orbit computations; the use of two frequencies provides the necessary data to correct for ionospheric effects. The modulation frequencies are transmitted in a time-sharing sequence for 4.8 s out of each minute. This pattern of transmissions permits a user with a TIMATION-2 receiver, which also contains a clock, to measure the time difference between the signal received from the satellite and the receiver clock. This time difference is the sum of the time required for the signal to propagate from the satellite to the receiver and the synchronization error between the satellite and receiver clocks (Ref. 19).
The resolution of the time-difference measurement is approximately 1% of the period of the highest modulation frequency, or 10 ns. The lowest modulation frequency, 100 Hz, provides ambiguity resolution of 10 ms. This resolution insures an unambiguous measurement, since the propagation time can vary from about 3 to 12 ms as the satellite travels from directly overhead to the horizon.
The time difference, measured using the 400 MHz band, can be multiplied by the velocity of propagation to obtain an "observed" range. This range corresponds to the geometric distance from satellite to receiver plus contributions due to clock-synchronization error and to ionospheric and tropospheric effects. For the transfer or comparison of time between two observers, the clock-synchronization term is the one of interest. The accuracy to which it can be determined is a function of how well the other factors can be specified or eliminated.
NTS-1 (Navigation Technology Satellite-1) / TIMATION-3
A description of the spacecraft was not available.
Parameter | TIMATION-1 | TIMATION-2 | NTS-1 | NTS-2 |
Launch date | 31.05.1967 | 30.09.1969 | 14.07.1974 | 23.06.1977 |
Spacecraft mass | 40 kg | 55 kg | 295 kg | 431 kg |
Spacecraft power | 6 W | 18 W | 100 W (BOL) | 445 W (BOL) |
RF communications | UHF | VHF, UHF | UHF, L-band | UHF, L, L1, L2 |
Oscillator | Quartz (2) | Quartz (2) | Quartz, Rubidium (2) | Quartz, Cesium (2) |
Δf/f per day (pp 1013) | 300 | 100 | 5-10 | 2 |
Range error | 750 m/day | 75 m/day | 12-24 m/day | 5 meter/day |
Laser reflectors |
|
| Retroreflector array | Retroreflector array |
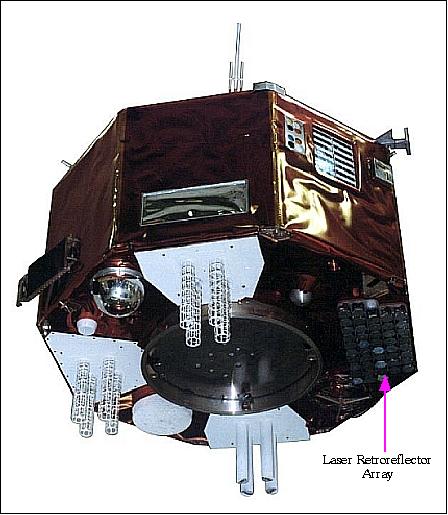
The NTS-1 and NTS-1 satellites carried also a retroreflector array to permit SLR (Satellite Laser Ranging) from various ground stations. The tracking measurements were used as additional inputs for precise orbit determination (next to Doppler tracking). One element of the NTS-2 retroreflector was designed for light emitted in the ultraviolet region
Launch
The NTS-1 spacecraft was launched on July 14, 1974 from VAFB, CA.
Orbit: MEO (Medium-altitude Earth Orbit), mean altitude = 13,700 km, period = 8 hours.
RF communications: The TT&C operations were conducted in the UHF band.
Sensor Complement
NTS-1 was the first satellite to carry onboard rubidium AFS (Atomic Frequency Standard) clocks. These were commercial units built by Efratom (Munich, Germany, now Symmetricom) and modified by NRL for space operation.
NTS-1 tested two rubidium vapor atomic clocks and operated on two different frequencies (335 MHz and 1580 MHz) in order to improve accuracy. The atomic clocks had better frequency stability than earlier clocks, which greatly improved the prediction of spacecraft orbits (ephemerides) and would eventually extend the time required between control segment updates to GPS satellites. This pioneering work on space-qualified time standards was an important contribution to the GPS program.
Independent verification of clock stability: 21)
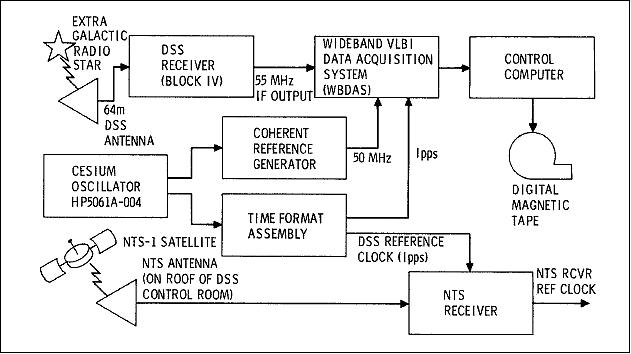
A series of experiments were conducted in May 1978 to compare the intercontinental clock synchronization capabilities of the NTS-1 time transfer system and a VLBI (Very Long Baseline Interferometry) system in use at the NASA DSN (Deep Space Network). The objective was to provide independent verification of the accuracy of both systems. This verification was accomplished at the 0.5 µs level.
The experiments were conducted between the 64 m DSN station at Goldstone, CA (DSS 14) and Madrid, Spain (DSS 13). The VLBI experiments used the WBDAS (Wideband Digital VLBI Data Acquisition System) developed at NASA/JPL.
The satellite time transfer experiments used the NTS-1 satellite, and the NTS timing receivers developed at NASA/GSFC. The NTS receivers were brought to the DSS stations especially for these experiments. The configuration of the VLBI data acquisition system and the NTS time transfer receiver at each DSS is shown in Figure 4. The primary frequency standard at each station was a HP5061A-004 cesium oscillator.
For the VLBI system, clock sync residuals were produced which demonstrated a day-to-day consistency at the 20-30 ns level; the long-term frequency stability of the system was measured to be at the level of 10-13.
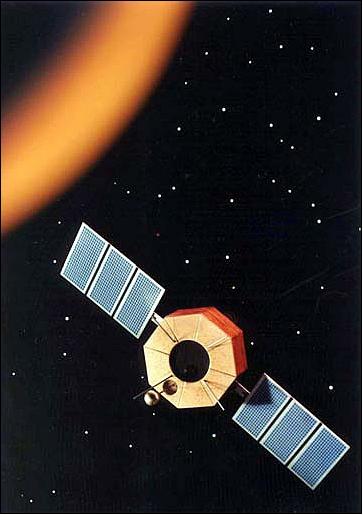
NTS-2 (Navigation Technology Satellite-2)
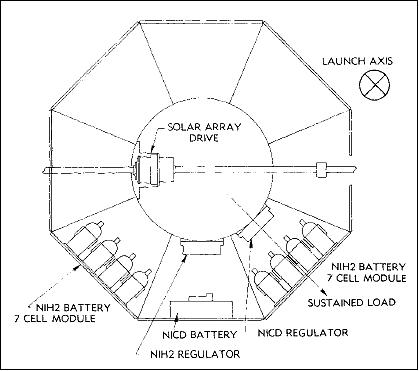
NTS-2 is the fourth in a series of NRL technology satellites designed and developed at NRL. It included subsystems provided by Rockwell International under contract to the newly formed NAVSTAR GPS Joint Program Office (JPO). The spacecraft employs three axis gravity-gradient stabilization with momeritum wheel unloading. 22)
Spacecraft power of 445 W (BOL) was provided (nominal power of 325 W). Use of NiCd batteries and NiH2 (Nickel-Hydrogen) demonstration batteries as backup units. The NiH2 batteries were developed by the Comsat Laboratories in Clarksburg, MD. This represented a first-time use of NiH2 batteries on a satellite. The nickel-hydrogen battery supplied spacecraft power for one 30 day eclipse season during which two eclipse periods occurred daily, lasting no longer than one hour. The battery used a novel concept in which temperature is used for charge control. The battery was designed to accommodate fourteen 35 Ah cells connected in series. 23)
Solar cell experiment results after 447 days in orbit: The objective of the solar cell experiment, consisting of 15 separate experiments of five cells each, is to evaluate the performance of state-of-the-art solar cells in the MEO space environment. Telemetered data from the 14 silicon and one gallium arsenide modules indicate a more severe radiation environment in the 63º, 20,190 km circular orbit than was predicted. Based on the NTS-2 data, the solar power array containing Spectrolab Helios cells will degrade 27% in maximum power over the three-year mission. Solar cell panel temperatures have reached 104 C providing ideal conditions for annealing of the radiation-induced damage in the gallium arsenide cells. After 15 months of operation these cells have suffered the least power degradation, with a maximum power loss of 14.0%. After 447 days in orbit, the loss in power ranged from 14.0% to 59.5% with the exception of the Solarex 'low-cost space cell' which became open-circuited on the 69th day. The average value of I/sub sc/measured in space on the first day of exposure agreed with prelaunch solar simulator values to within 1 ± 0.99%. The agreement between V/sub oc/ in space and solar simulator values was 1.24 ± 1.08%.
Launch
The NTS-2 spacecraft was launched from VAFB (Vandenberg Air Force Base), CA, on June 23, 1977. Launch vehicle: Atlas F, LV configuration.
Orbit: MEO (Medium-altitude Earth Orbit), altitude = 20,200 km, inclination = 63º, period of ~12 hours (717.973 minutes, near circular orbit). The spacecraft was first put into a high eccentricity transfer orbit which was eventually equalized with the AKM (Apogee Kick Motor).
First acquisition of signal (AOS) was made by the NTS tracking station in Panama. NTS-2 was then acquired and tracked from Blossom Point, MD, USA. Calculations of measurement residuals indicated a nominal transfer orbit. The scheduled AKM burn at the first apogee was deferred in order to allow processing of measurements from the launch tracking network. The launch tracking network consisted of two of the NTS tracking stations (Panama and Chesapeake Bay, MD) complemented by Blossom Point, MD, Millstone, MA, and the Range Measurements Laboratory at Patrick AFB, FLA. The tracking network was coordinated by the NRL Control. Center (NRLCC), which has links to the GPS Master Control Station.
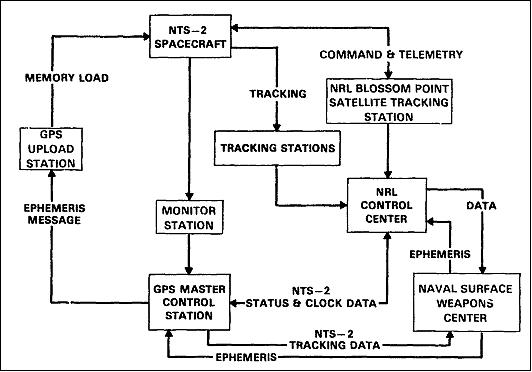
The NTS-2 tracking network consisted of U.S. stations located in Chesapeake Beach, MD (CBD), Panama Canal Zone (PMA), overseas stations were located at the Royal Greenwich Observatory (RGO) in England and in Australia (AUS) at a Division of National Mapping site. Un.ited States stations were operated by Bendix Field Engineering, the overseas sites were operated by personnel from England and Australia, all under the direction of NRLCC.
Sensor Complement
NTS-2 is the first GPS/NAVSTAR satellite of Phase-1 providing near-instantaneous navigation and time-synchronization service on a worldwide, continuous basis to the DOD community and a wide variety of commercial users (Ref. 22). 25)
NTS-2 technological features encompass the world's first orbiting Cesium frequency standards (2 units), also referred to as AFS (Atomic Frequeny Standard), built by FTS (Frequency and Time Systems), now Symmetricom Inc., in collaboration with NRL.
NTS-1 and -2 clearly established the excellent improvement in frequency stability of AFSs over XOs (Quartz Crystal Oscillators) and demonstrated the feasibility of producing AFSs for space applications. Each AFS in NTS-2 performed well in space for about 18 months.
The AFS technique offered two distinct advantages over crystal oscillators. They significantly improved the predictions of satellite orbit determination (ephemerides) by providing stable, low noise signals for ranging. Second, they eventually enabled satnav system operators to extend the time required between control segment updates to orbiting satellites. In short, the AFSs have made satellite navigation a practical system to operate.
Precise Time and Frequency Transmissions
Precise frequency signals for NTS-2 transmissions were obtained from one of the two spacecraft qualified cesium frequency standards built by FTS. Each cesium standard could also be operated in a quartz oscillator mode which required less power. The reduced power, quartz only mode was used for the first 15 days after NTS-2 launch. The cesium standard was locked following solar panel deployment which allowed full power operation.
NTS-2 t.iming information was continuously transmitted in two modes, a side-tone ranging system, called the ODATS (Orbit Determination and Tracking System); the other was the PRNSA (Psuedo Random Noise Subsystem Assembly). Time difference measurements between the spacecraft clock and ground station clocks were made through special receivers which measured the time difference by comparing a waveform similar to that transmitted by the spacecraft. These measurements were then used to determine the spacecraft orbit clock difference, frequency difference, and other parameters associated with GPS operation.
Frequency determination: GPS requirements for the NTS-2 mission called for cesium controlled frequency operation after full power was available, following solar panel deployment. The first FTS cesium standard to be used, designated as PRO-5, was locked up on the first attempt on Day 190, 1977, at 1418 UTC following a frequency tune to bring the PRO-5 quartz oscillator frequency within the VCXO (Voltage-Controlled Quartz Crystal Oscillators) tuning range of the cesium resonance frequency.
Verification of Relativistic Clock Effect
The project recognized the fact that orbiting clocks would require a relativistic correction, but there was uncertainty as to its magnitude as well as its sign. Indeed, there were some who doubted that relativistic effects were truths that would need to be incorporated.
A frequency synthesizer was built into the satellite clock system so that after launch, if in fact the rate of the clock in its final orbit was that predicted by general relativity, then the synthesizer could be turned on, bringing the clock to the coordinate rate necessary for operation. After the Cesium clock was turned on in NTS-2, it was operated for about 20 days to measure its clock rate before turning on the synthesizer. 26) 27)
The frequency measured during that interval was +442.5 parts in 1012 faster than clocks on the ground, while general relativity predicted +446.5 parts in 1012. The difference was well within the accuracy capabilities of the orbiting clock. This then gave about a 1% verification of the combined second-order Doppler and gravitational frequency shift effects for a clock at 4.2 RE (Earth radii).
If left uncorrected this would have resulted in timing errors of about 38,000 nanoseconds per day. The difference between predicted and measured values of the frequency shift was only 3.97 parts in 1012, well within the accuracy capabilities of the orbiting clock. This then gave about a 1% validation of the combined motional and gravitational shifts for a clock at 4.2 RE.
A relativistic offset correction is still in use by every satellite in the GPS constellation.
References
1) http://www.globalsecurity.org/space/systems/timation.htm
2) Jay Oaks, James A. Buisson, “Satellite Time Transfer Past and Present,” 34th Annual Precise Time and Time Interval (PTTI) Meeting, Dec. 3-5,, 2002, Reston, VA, USA, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ADA485914&Location=U2&doc=GetTRDoc.pdf
3) Roger L. Easton, “The Role of Time/Frequency in Navy Navigation Satellites,” Proceedings of the IEEE Special Issue on Time and Frequency, Vol. 60, No. 5, pp. 557-563, publication date: May 1972
4) “A brief history of satellite navigation,” Stanford University, June 13, 1995, URL: http://news.stanford.edu/pr/95/950613Arc5183.html
5) Greg Goebel, “US Navigation Satellite Systems,” 2008, URL: http://www.vectorsite.net/ttgps_1.html
6) Francis M. Czopek, “Pre GPS History of Satellite Navigation,” PNT (Position, Navigation, Time) 2008, Challenges and Opportunities Symposium, Nov. 5-6, 2008, Stanford University, URL: http://scpnt.stanford.edu/pnt/PNT08/Presentations/2_Czopek_PNT_2008.pdf
7) R. L. Beard, J. Murray, J. D. White, “GPS Clock Technology and the Navy PTTI Programs at the U.S. Naval Research Laboratory,” 1986, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ADA492721&Location=U2&doc=GetTRDoc.pdf
8) Ralph T. Allen, “A Review of the U.S. Navy's Precise Time and Time Interval (PTTI) Program," Proceedings of the Tenth Annual Precise Time and Tijne Interval (PTTI)_ Applications and Planning Meeting, NASA Technical Memorandum 80250, November 1978
9) Richard Stewart, “Evolution of Military GPS,” URL: http://grothserver.princeton.edu/~groth/frs142s04/Presentations/Richard_Presentation.ppt
10) “The Forerunners of GPS,” URL: http://gpsforyou.blogspot.com/2008/04/forerunners-of-gps.html
11) Stephen T. Powers, Brad Parkinson, “The Origins of GPS, Part 1,” GPS World, May 1, 2010, URL: http://www.gpsworld.com/gnss-system/gps-modernization/the-origins-gps-part-1-9890?page_id=5
12) Donna J. Born, “Profile: GPS Architect Bradford W. Parkinson, Building Consensus from the Ground Up,” Crosslink, Vol. 3, No 2, Summer 2002, URL: http://www.aero.org/publications/crosslink/summer2002/profile.html
13) Steven R. Strom, “Charting a Course Toward Global Navigation,” Crosslink, Vol. 3, No 2, Summer 2002, URL: http://www.aero.org/publications/crosslink/summer2002/01.html
14) Scott Pace, Gerald P. Frost, Irving Lachow, David R. Frelinger, Donna Fossum, Don Wassem, Monica M. Pinto, “The Global Positioning System, “GPS History, Chronology, and Budgets,” Appendix B, ISBN/EAN: 0-8330-2349-7, Document No: MR-614-OSTP, 1995, URL: http://www.rand.org/pubs/monograph_reports/MR614/index.html and, URL: http://www.rand.org/content/dam/rand/pubs/monograph_reports/2007/MR614.pdf
15) Thomas B. McCaskill, “GPS Inventor,” URL: http://www.gpsinventor.com/
16) Richard Easton, “Who invented the Global Positioning System?” The Space Review, May 22, 2006, URL: http://www.thespacereview.com/article/626/1
17) Robert A. Nelson, “The Global Positioning System,” Nov. 1999, URL: http://www.aticourses.com/global_positioning_system.htm
18) Bradford W. Parkinson, Konstantin Gromov, Thomas Stansell, Ronald Beard, “A History of Satellite Navigation,” Proceedings of the 51st Annual Meeting of the Institute of Navigation, June 5 - 7, 1995, Colorado Springs, CO
19) J. A. Buisson, D. W. Lynch, B. McCaskill, “Time Transfer Using the TIMATION II Satellite,” NRL Report 7559, May 3, 1973, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=AD0525880&Location=U2&doc=GetTRDoc.pdf
20) Roger L. Easton, James A. Buisson, Thomas B. McCaskill, 0. J. Oaks, Sarah Stebbins, Marie Jeffries, “The Contribution of Navigation Technology Satellites to the Global Positioning System,” NRL Report 8360, Dec. 28, 1979, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ADA080548&Location=U2&doc=GetTRDoc.pdf
21) W. J. Hurd, S. C. Wardrip, J. Bussion, J. Oaks, T. McCaskill, H. Warren, G. Whitworth, “Submicrosecond Comparison of Intercontinental Clock Synchronization by VLBI and the NTS Satellite,” 1978, DSN Progress Report 42-49, URL: http://tmo.jpl.nasa.gov/progress_report2/42-49/49J.PDF
22) James A. Buisson, Roger L. Easton, Thomas B. McCaskill, “Initial Results of the NAVSTAR GPS NTS-2 Satellite,” 10th Annual PTTI (Precise Time and Time Interval) Meeting, Vol. 10, Nov. 1978, URL: http://www.leapsecond.com/history/1978-PTTI-v9-NTS-2.pdf
23) J. F. Stockel, J. D. Dunlop, “NTS-2 Nickel-Hydrogen Battery Performance,” Journal of Spacecraft and Rockets, Vol. 17, No 1, Jan./Feb. 1980, pp.31-34, Article No: 78-536R
24) “A Short History Of Satnav Time,” ION Newsletter, Vol. 17, No 2, Summer 2007, p. 19, URL: http://www.ion.org/newsletter/v17n2.pdf
25) Leo A. Mallette, “Atomic and Quartz Clock Hardware for Communication and Navigation Satellites,” 39th Annual Precise Time and Time Interval (PTTI) Meeting, Long Beach, CA, Nov. 27-29, 2007
26) Neil Ashby, “Relativity in the Global Positioning System,” Jan. 28, 2003, URL: http://www.ipgp.fr/~tarantola/Files/Professional/GPS/Ashby_2003.pdf
27) J. A. Buisson, R. L. Easton, T. B. McCaskill, “Initial Results of the NAVSTAR GPS NTS-2 Satellite”, in L. Rueger, et al., (editors) Proceedings of the 9th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting,, Nov. 29-Dec. 1, 1977, pp.177-200
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).