Argus
Non-EO
SSRL (Space Systems Research Laboratory)
Quick facts
Overview
| Mission type | Non-EO |
| Agency | SSRL (Space Systems Research Laboratory) |
| Launch date | 04 Nov 2015 |
| End of life date | 04 Nov 2015 |
Argus
Overview Spacecraft Launch References
Argus is a collaborative nanosatellite radiation mission between SSRL (Space Systems Research Laboratory) at Saint Louis University (SLU), Saint Louis, MO, and ISDE (Institute for Defence and Space Electronics) at Vanderbilt University (VU) in Nashville, Tennessee. The overall objectives of the Argus mission are: 1) 2)
• Improve the predictive performance modeling of radiation effects on small, modern space electronics devices by collecting radiation particle collision data from electronics
• Includes three separate radiation experiments to accomplish this:
- SELE (Single Event Latchup Experiment)
- LEPE (Low Energy Proton Experiment)
- PEME (Low Energy Proton Experiment).
The Argus program is envisioned as more than one or two flights; rather, it is to be a sustained campaign of space experiments spanning many years and many launches. This campaign will involve ISDE instruments flying on multiple platforms, including SSRL spacecraft.
The joint venture of SSRL and ISDE is based on overlapping interests: SSRL in space systems engineering research and education, ISDE in radiation effects modeling and in space-qualifying modern electronics. The payload-bus interface as well as the spacecraft-ground interface have been designed intentionally to maximize the ability of each institution to meet its objectives.
The development of Argus began in January 2011 under the University Nanosat-7 competition. Payload development began in September 2011; the Core Bus will be integrated with a functional version of the payload in the fall of 2012, and flight integration will take place in February 2013.
Spacecraft
After COPPER, Argus is the second spacecraft in development at SLU/SSRL, carrying the Independence payload on a 2-year mission. As shown in Figure 2, the spacecraft is a very simple single-string system. It is nominally a 2U CubeSat, with approximately 0.5U devoted to the spacecraft bus and the remainder to the payload. It may be possible to reduce the entire spacecraft to the 1U form factor; the 2U size was selected for the first Argus spacecraft in order to reduce development time and maximize the power, mass and volume available for the Independence payload.
The first Argus spacecraft, called Argus-High (2U CubeSat, i.e. a nanosatellite) , will provide 3 W average daily power and have a total mass of ~ 3 kg.

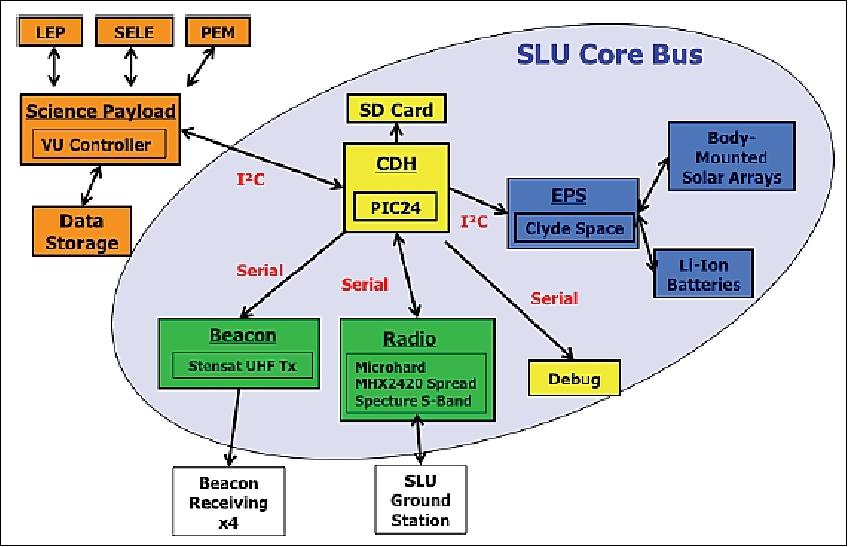
Argus is a 2U CubeSat employing the reuseable SCARAB (SLU Core Aerospace Research Application Bus) platform of SSRL. SCARAB provides a means to an end: simplifying spacecraft design and implementation. 3)
SCARAB is a baseline of CubeSat design, a starting point from which to develop fully functional satellites. It includes:
• PIC24 PPM & Motherboard from Pumpkin Inc.
• ClydeSpace 1U EPS & Spectrolab solar cells
• MHX2420 & Stensat radio beacon.
The satellite uses a structural frame provided by Pumpkin Inc., incorporating a PIC-24 CubeSat Kit Microcontroller, body-mounted solar panels & Li-Ion/polymer batteries and a UHF/VHF transceiver for communications. The satellite uses a passive attitude control system.
Launch
The Argus CubeSat was launched as a secondary payload on November 4, 2015 (03:45:00 UTC) on the ORS-4 (Operationally Responsive Space-4) mission of DoD (USAF ORS office). A Super Strypi launch vehicle (LV) will deliver the HawaiiSat-1 primary payload and multiple secondary CubeSat payloads into orbit. The Super Strypi is a rocket developed by Sandia National Laboratories with assistance from the University of Hawaii, Aerojet and the U.S. Defense Department. The launch site is PMRF (Pacific Missile Range Facility) Barking Sands of the US Navy, located on the Hawaiian island of Kauai. 4) 5) 6) — Unfortunately, the Super Strypi launch vehicle experienced a launch failure about 1 minute into the flight. 7) 8)
The first flight of an experimental U.S. military rocket designed for low-cost, quick-reaction satellite launches ended in failure over Hawaii on Tuesday, the Air Force said, destroying 13 small spacecraft clustered on the mission for NASA researchers and university students. 9)

Orbit: Near-elliptical orbit, altitude of 430 x 505 km, inclination = 94.8º, period of ~ 90 minutes.
Secondary Payloads on the ORS-4 Mission
• Argus, a 2U CubeSat of SLU (Saint Louis University), Saint Louis, MO, and ISDE (Institute for Defense and Space Electronics) at Vanderbilt University (VU) in Nashville, Tennessee (3 kg). A collaborative nanosatellite radiation mission. Argus uses a platform named SCARAB and a research payload named Independence, which will be used to update models of how electronics behave when exposed to radiation in the space environment.
• EDSN (Edison Demonstration of Smallsat Networks). The EDSN mission of NASA/ARC (Ames Research Center) consists of a swarm of 8 1.5 U CubeSats, each with a mass of ~ 2kg. The EDSN project aims to demonstrate cross-satellite data communications for flexible data correlation and distribution as well as simplified satellite operations and data downlink. Being a constellation of satellites outfitted with space weather sensors, EDSN can deliver spatially and temporarily correlated data sets that can not be acquired from single satellite missions.
• PrintSat, a 1U CubeSat of MSU (Montana State University).
• STACEM, a 3U CubeSat designed, built and operated by the SDL (Space Dynamics Laboratory) of USU (Utah State University). The satellite demonstrates a miniaturized multi-spectral payload for the acquisition of imagery in the visible and near infrared wavelengths and hyperspectral channels. Imagery is to be used in environmental monitoring. The launch of STACEM on the SPARK launch vehicle is financed by the U.S. National Reconnaissance Office.
• Supernova-Beta, a 6U prototype CubeSat of Pumpkin Inc. Supernova is a satellite platform designed to be highly configurable for a rapid integration of enhanced CubeSat missions, offering a payload volume of 7000 cm3. The Supernova chassis has a mass of 1.64 kg and the total allowable mass of the satellite is specified as 12 kg by Pumpkin.
The NLAS (Nanosatellite Launch Adapter System) of NASA is manifested on the ORS-4 mission. The NLAS deployer includes adapter, 6U dispenser, and sequencer. The adaptor prototype design was provided by NASA/ARC, the final design, fabrication and test was provided by Moog CSA Engineering. A single NLAS provides the capability to deploy 24U of CubeSats. The system is designed to accommodate satellites measuring 1U, 1.5U, 2U, 3U and 6U sizes for deployment into orbit. 10) 11)
Concept of Operations
Argus starts with a very simple operations concept. The radiation-effects modeling experiments operate continuously and require neither active pointing nor real-time monitoring from the ground. Science data is generated only when an event occurs; depending on the devices being tested, there may be minutes to hours to days between events. Therefore, the data collection requirements are very modest, and there are no time-critical events; it is sufficient that on-board science data "eventually" be relayed to the ground (Ref. 1).
As shown in Figure 4, Argus will be operated as an automated remote-monitoring station. It will be launched as a secondary on any available launch meeting the science orbit profile (typically, above 550 km with inclinations consistent with the ground station network). The spacecraft will be ejected from the P-POD canister and immediately enter safe mode. Once mission control makes contact with the spacecraft and verifies nominal operations, the mission will immediately enter science mode; the payloads will be activated and monitored for radiation events. Argus is not stabilized and is powered via body-mounted solar arrays.
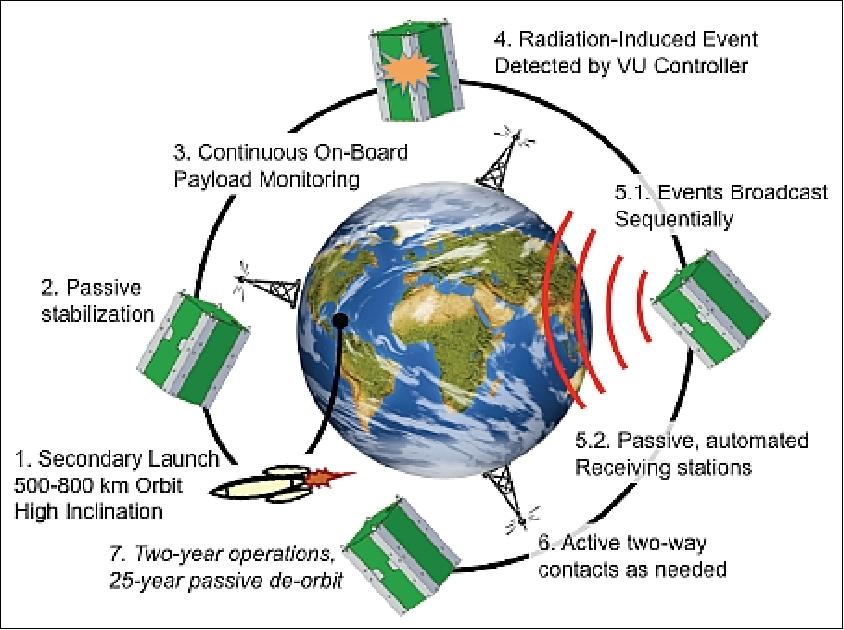
Science mission data consists of the time-tagged radiation event logs: the details of the event plus a state-of-health snapshot (e.g., attitude, thermal state, power consumption); the total data capture for an event is on the order of 1 kbit, with an expectation of only a handful of events per day. Additional engineering housekeeping data will be on the same order of magnitude.
Argus is designed to be as automated as possible. On-board telemetry monitoring will respond to threatening conditions such as low battery voltage by entering safe mode and notifying ground operations via the beacon network. In reality, there are so few components on Argus that "safe mode" consists of deactivating the payload, changing the beacon message to indicate an on-board problem, and awaiting instructions from the ground. In addition, hardware will be designed with latch-up protection and software will include error detection and correction capabilities.
A distributed network of near-omnidirectional receive-only ground stations will be utilized to capture mission data. The stations automatically tune to the appropriate frequency to monitor Argus as it flies overhead. All received data is logged and automatically relayed over the Internet to mission control.
The timing of beacon broadcasts, the size of the buffer and other communication parameters will be adjustable on-orbit, and thus the architecture can be adjusted based on actual event rates and ground station distribution. It is anticipated that the first Argus will be actively contacted by mission control on a regular basis, helping to establish the baseline performance for future missions.
Argus will continue in science mode until it de-orbits or components fail. The mission will generate relevant science data as long as Argus is capable of collecting radiation induced event data. As for de-orbiting, current NASA policy for CubeSat debris management is to release the spacecraft into low-perigee elliptical orbits (e.g., 300 x 1000 km) to limit orbit life to a few years without the need for drag mechanisms. This is the expected approach with Argus.
References
1) Michael Swartwout, "Argus: Radiation Effects Modeling on a University Nanosat," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC-12-VII-5
2) Michael Swartwout, Sanjay Jayaram, Robert Reed, Robert Weller, "Argus: A Flight Campaign for Modeling the Effects of Space Radiation on Modern Electronics," Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, March 3-10, 2012
3) Tom Moline, Wesley Gardner, "SCARAB: Integration of the COPPER and Argus Spacecraft," 2012 Summer CubeSat Developers' Workshop, Logan, Utah, USA, Aug. 11-12, 2012, URL: https://web.archive.org/web/20130829024939/http://mstl.atl.calpoly.edu/~bklofas/Presentations/SummerWorkshop2012/Moline_SCARAB.pdf
4) Stephen Clark, "Debut flight of rail-guided space launcher slips to October," Spaceflight Now, March 23, 2015, URL: http://spaceflightnow.com/2015/03/23/debut-flight-of-rail-guided-space-launcher-slips-to-october/
5) Mike Gruss, "Despite Uncertain Future, ORS Office Has Missions To Work On," Space News, April 28, 2014, URL: http://spacenews.com/40368military-space-quarterly-despite-uncertain-future-ors-office-has/
6) Doug Messier, "ORS, University of Hawaii Team Up on New Small Satellite Launcher," Jan. 26, 2013, URL: http://www.parabolicarc.com/2013/01/26/ors-university-of-hawaii-team-up-on-new-small-satellite-launcher/
7) Mike Gruss, "Rail-launched Super Strypi Rocket Packed with Cubesats Fails in Debut ," Space News, Nov. 4, 2015, URL: http://spacenews.com/rail-launched-super-strypi-rocket-packed-with-cubesats-fails-after-liftoff/
8) Patrick Blau, "Debut Launch of Super Strypi Rocket fails during First Stage Flight," Spaceflight 101, November 4, 2015, URL: http://spaceflight101.com/debut-flight-of-super-strypi-rocket/
9) Stephen Clark, "Air Force declares failure on Super Strypi test launch," Spaceflight Now, Nov. 4, 2015, URL: http://spaceflightnow.com/2015/11/04/air-force-declares-failure-on-super-strypi-test-launch/
10) Joe Maly, "CubeSat Payload Accommodations and Propulsive Adapters," Proceedings of the 11th Annual CubeSat Developers' Workshop - The Edge of Exploration," San Luis Obispo, CA, USA, April 23-25, 2014, URL: http://www.cubesat.org/images/cubesat/presentations/DevelopersWorkshop2014
/Maly_CubeSat_Payload_Accommodations.pdf
11) "Nanosatellite Launch Adapter System (NLAS)," NASA, August 30, 2013, URL: http://www.nasa.gov/centers/ames/engineering/projects/nlas.html#.U3HimHaegZM
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).