BX-1 (BanXing-1 companion microsatellite of the Shenzhou-7 Mission)
Non-EO
Mission complete
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Mission complete |
| Launch date | 27 Sep 2008 |
| End of life date | 06 Jan 2009 |
BX-1 (BanXing-1 companion microsatellite of the Shenzhou-7 Mission)
The BX-1 microsatellite is the companion (inspection) demonstration spacecraft of the SZ-7 (Shenzhou-7) mission, China's third manned spaceship, which was launched on Sept. 25, 2008 by a CZ-2F (Long March) vehicle from the JSLC (Jiuquan Satellite Launch Center) in the northwestern Gansu Province of China. The meaning of “ban xing” is an abbreviation form of the Chinese term for companion satellite: “ban sui wei xing”.
Orbit: The mean orbital altitude of the SZ-7 spaceship was ~ 330 km with an inclination of 42.4º and a period of 91 minutes. Note: the initial elliptical orbit of 200 km x 330 km was raised about 7 hours after launch to a more circular orbit of ~330 km.
Shenzhou 7 was the first Chinese space mission to carry a three-person crew (taikonauts) for several days and conduct a full operation. The SZ-7 spaceship had a total mass of ~7800 kg. The first successful EVA (Extra Vehicular Activity) of a taikonaut took place on the second day of flight (during the orbits 27 to 29).
While the EVA was taking place on Sept. 27, 2008, the SZ-7 spaceship came fairly close (within 47 km) of the International Space Station (ISS). Naturally, from a security standpoint NASA was concerned about these activities happening that close to the ISS. 1)
The three taikonauts returned to the ground safely after 3 days of flight on Sept. 28, 2008. CASC (China Aerospace Science and Technology Corporation) the state-owned company, was the prime contractor of the SZ-7 spacecraft and the mission. CAS (Chinese Academy of Sciences) was responsible for the payloads on board the spacecraft (other than the crew). 2) 3)
BX-1 Spacecraft and Mission
The BX-1 spacecraft was built by the Shanghai Engineering Center for Microsatellites / Chinese Academy of Sciences (SECM/CAS), Shanghai, China. The objective of the BX-1 microsatellite, which was launched along with the SZ-7 spaceship, is to carry out three in-orbit experiments (demonstrations) during the SZ-7 mission: 4) 5) 6)
• In-orbit ejection from the SZ-7 spaceship
• Image capture demonstration with the BX-1 on-board cameras of the SZ-7 spaceship from a nearby orbit.
• Use of the AOCS and propulsion subsystems of BX-1 to realize companion (formation) flying.
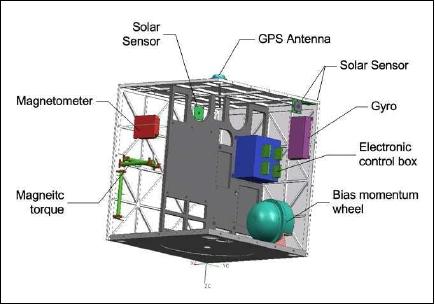
The BX-1 microsatellite has a box-structure with a size of 450 mm x 430 mm x 450 mm and a total mass of 40 kg, including 1 kg of propellant Figure 3). The spacecraft is 3-axis stabilized. The AOCS (Attitude and Orbit Control Subsystem) uses 3 sun sensors, a rate sensor and a magnetometer for attitude sensing; actuation is provided by a bias momentum wheel and 3 torque rods. The AOCS performs attitude determination and stabilized pointing which includes inertial pointing, spaceship pointing, transition pointing during orbit maneuvers, and companion target pointing. The spaceship pointing accuracy is about 2º, with a stability of 0.1º/s.

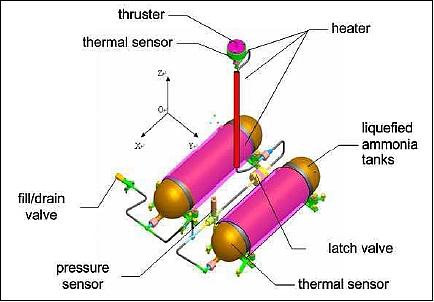
The propulsion subsystem of BX-1 uses liquid ammonia as propellant, which has many advantages such as non-pollution, low cost and small control impulse, and is well suitable for microsatellites. The subsystem consists of one fill/drain valve, one filter, one latch valve, one pressure sensor, one cold gas thruster, a set of heaters, two liquefied ammonia tanks, and two thermal sensors. Saturated vapor pressure is used for propulsion.
BX-1 features a centralized high-performance data handling system, with a 386EX CPU for central monitoring and control. The onboard computer fulfils the data management tasks including flight dynamics control, AOCS data processing, payload data management, telemetry control, power and thermal control, etc.
RF communications: The spacecraft uses a USB (Unified S-band) TT&C (Telemetry, Tracking and Command) implementation and is controlled by BACC (Beijing Aerospace Control Center) through S-band antennas. The S-band data rates are 2 kbit/s in uplink and 4 kbit/s in the downlink.
In addition, BX-1 is equipped with high-speed S-band downlink at a data rate of 768 kbit/s, for rapidly transmitting the payload data to the ground station. The TT&C and the payload downlink subsystems are providing a backup function for each other in case of failure.
Release device
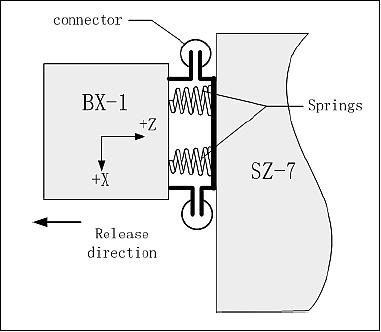
The release device of BX-1 is designed to connect the BX-1 and SZ-7 mechanically during launch and initial orbit and to provide the ejection force for releasing BX-1 from SZ-7 mother ship. As shown in Figure 6, the release device of BX-1 consists of connectors and springs. The BX-1 microsatellite is fixed onto the SZ-7 mother ship with connectors.
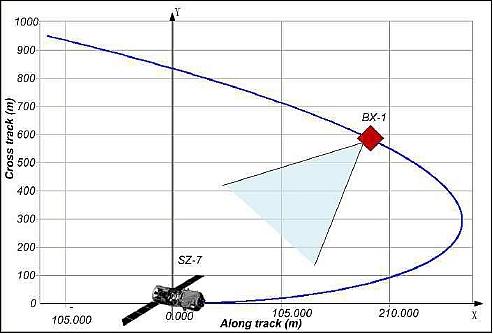
At release, the connectors are being unlocked and the microsatellite is pushed from the spaceship with an initial velocity. Two springs are installed symmetrically about the pitch axis to ensure an attitude stability of BX-1 in the roll and yaw directions. The nominal initial ejection velocity is 0.675 m/s and the nominal ejection direction deviates 5º from the velocity vector of the spaceship's orbital plane. Figure 7 shows the simulation results of the relative motion of BX-1 after ejection from the SZ-7. Twenty minutes after ejection, BX-1 is about 900 m away from the mother spaceship.
Deployment of BX-1
The BX-1 microsatellite was deployed in-orbit on Sept. 27, 2008 - by ejecting it from the nose of the SZ-7 orbital spacecraft on the 31st orbit. The NORAD ID of BX-1 is 33392, the international code is: 2008-047G. The ejection occurred shortly after the EVA in the SZ-7 was completed.
Orbit: perigee of 280 km, apogee of 296 km, inclination = 42.4º, period = 90.1 minutes.
Sensor Complement
The BX-1 payload features two small cameras: a WFOV (Wide Field of View) and a NFOV (Narrow Field of View) camera. The objective is to provide an inspection function from a various orbital distances (several meters to several kilometers) - by taking high-resolution imagery of the Shenzhou-7 spaceship.
The WFOV camera has a focal length of 10 mm, with FOV of 35º x 45º. The NFOV camera has a focal length of 50 mm, with FOV of 7º x 9º. The detectors are of the type CMOS APS. Both cameras are installed on the +Z panel of the release device on SZ-7; they are pointing into the direction of the spaceship.
During the first four minutes after ejection of the spacecraft, when the BX-1 is within 160 m from the SZ-7, the WFOV camera takes close photos of the spaceship. During the following 16 minutes, when the satellite is of about 160 m to 900 m away from the spaceship, the NFOV camera starts to work and take images of the SZ-7 from different aspect angles.

The two cameras share the same electrical circuitry. A real-time image compression algorithm is applied onboard to improve the storage efficiency.
Experimental Results and Mission Status
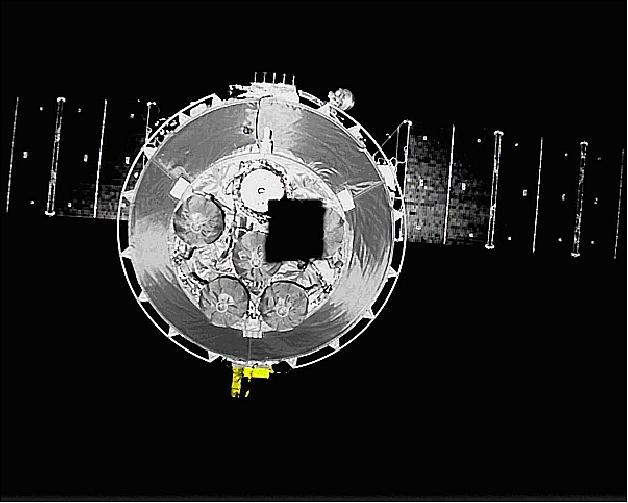
• During the first 20 minutes after ejection, BX-1 took videos and imagery of the spaceship, and kept pointing to the spaceship during the imaging phase. The Figures 9 and 10 document two instances of the ejection sequence of the BX-1 microsatellite - thereby validating the proper functioning of all aspects of the sequence - the release device, the cameras, and the attitude control subsystem of the inspection satellite must have worked nominally according to plans.
• Design of formation flying: The simplest relative orbital ellipse is selected as the configuration of Leader/Follower. The period of relative ellipse is equal to the period of circular orbit of SZ-7. In other words, the semi-major axis of two spacecrafts were equal while the eccentricity and latitude augment of them have a slight difference.
• Relative navigation: The orbit of BX-1 was determined by the on-board GPS data jointly with two-way range and range rate measurements of ground stations. The orbit information of two spacecrafts was gathered in the ground control center, which was responsible for relative navigation and orbit control operation.
• Although the flight test schedule was carefully chosen based on the space weather forecast in order to improve the accuracy of orbit determination and propagation, a conservative design was still carried out that the semi-minor axis of the intersatellite relative ellipse was chosen as 4 km, much larger than the total error. And BX-1 is designed to fly around the virtual orbital ellipse center which is in the 4 km x 8 km neighborhood of SZ-7, not exactly located on SZ-7.
• Intersatellite communication: There is no intersatellite communication between BX-1 and SZ-7.
• Result of formation control: When BX-1 drifted more than 400 km away from SZ-7, the first orbit maneuver was implemented. After six orbit maneuvers, BX-1 acquired a relative elliptic orbit with respect to the SZ-7 spaceship on October 5, 2008.

• In late December 2008, BX-1 was still orbiting in space, free of any problems. The various flight phases during the three months include (Figure 11):
- Prior to release phase
- Observation after ejection phase
- Steady flying phase
- Approaching phase
- Formation (companion) flying phase.
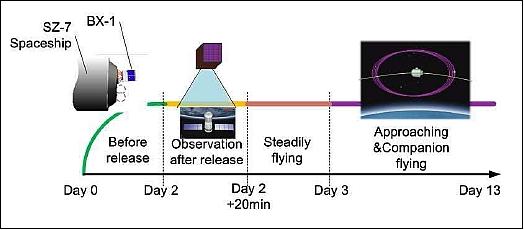
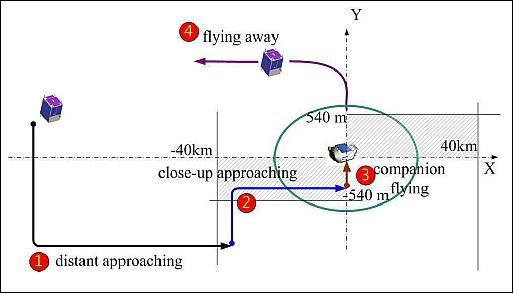
• According to Figure 11, the companion satellite kept flying away from the spaceship right after the release. After the astronauts returned back to the ground, the orbital module of the spaceship remained in orbit and the companion flying experiment started. At that time the BX-1 microsatellite was on the same orbital plane of the orbital module.
• The orbit maneuver for the companion satellite to approach the spaceship was carried out many times during several days until the companion (formation) flying was achieved. The orbit-control strategy of companion flying is shown in Figure 12.
• The main results of the companion flying are shown in Table 1. From the table it can be seen that the longest companion flying was maintained for about 70 orbital periods, that amounts to more than 100 hours.
Item | Target | Result |
Distance to the orbital module (SZ-7) | < 8 km | 4 km on average |
Semi-minor-axis of the companion flying orbit | 3.8 km | 3.794 km |
Companion flying duration | > 3 orbital periods | 70 orbital periods |
• The results of orbit-control for companion flying are shown in Figure 13, where the curve shows the relative motion trajectory of the companion satellite BX-1 to the orbital module of the SZ-7 spaceship. The results illustrate that the orbit control during companion flying formation and maintenance was successful, with the orbital maneuvers (propulsion) carried out to full satisfaction.

• On January 6, 2009, the BACC (Beijing Aerospace Control Center) reported that the BX-1 microsatellite finished its mission after 100 days in space. 7)
• In a correspondence with the author of Ref. 4), Zhencai Zhu (and received on Nov. 14, 2009), I was informed that while BX-1 had completed its nominal mission on Jan. 6 , 2009 — the microsatellite was still functional up to Oct. 30, 2009 when the last telemetry was received. The low solar activity during the year 2009 is considered the main reason for the slow orbit decay of BX-1.
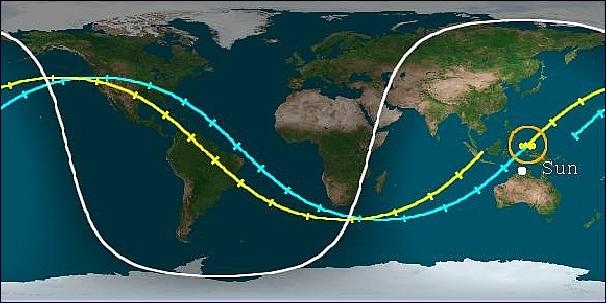
The 'Center for Orbital and Reentry Debris Studies' of The Aerospace Corporation is providing the time and coordinates of the predicted impact of BX-1.
In the SZ-7 mission, it is the first time that a microsatellite was ejected successfully from a manned spaceship of China, so that imagery of the manned spaceship were obtained by the BX-1 inspection satellite. The technologies such as the orbital maneuvers for target approaches, companion flying and maintenance - have been successfully validated and demonstrated during the various mission phases.
References
1) Dean B. Cheng,Peter L. Hays, Wade Huntley, Joan Johnson-Freese, Dingli Shen, “China, Space, and Strategy Space and Defence - Reflections on Sino-US Space Cooperation,” Space and Defence, Volume 2, No 3, Winter 2009, pp. 59-63, URL http://web.mac.com/...
2) Chinese Society of Astronautics, “Shenzhou-7 Mission and Beyond ----- from Imagination to Reality,” Space Review, Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, URL: http://www.thespacereview.com/archive/1322.pdf
3) http://en.wikipedia.org/wiki/Shenzhou_7
4) Zhencai Zhu, Hongyu Chen, Wen Chen, Yilin Zhou, Yong Yu, Caixia Cao, “BX-1: the Companion Microsatellite in Shenzhou-7 Mission,” Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-IV-4
5) David Wright, Gregory Kulacki, “Chinese Shenzhou 7 “Companion Satellite” (BX-1),” Oct. 21, 2008, URL: http://www.ucsusa.org/assets/...
6) Brian Weeden, “China’s BX-1 microsatellite: a litmus test for space weaponization,” Oct. 20, 2008, The Space Review, URL: http://www.thespacereview.com/article/1235/1
7) “Shenzhou-7 Monitor Satellite Finishes Mission After 100 Days In Space,” Space Daily, Jan. 6, 2009, URL: http://www.spacedaily.com/reports/...
8) http://reentrynews.aero.org/2008047g.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).