Chang'e-3 Moon-landing Mission
Non-EO
CAST
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | CAST |
| Launch date | 01 Dec 2013 |
| End of life date | 03 Aug 2016 |
Chang'e-3 Moon-landing Mission
Overview Spacecraft Launch Mission Status Sensor Complement References
Chang'e-3 is the third robotic lunar probe mission within CLEP (China Lunar Exploration Program). The objective is to soft-land on the moon's surface and deploy an unmanned Lunar Rover to explore the areas surrounding the landing site. The mission is headed by SASTIND (State Administration of Science, Technology and Industry for National Defence); the primary contractor for the probe is CAST (China Academy of Space Technology) of the China Aerospace Science & Technology Corporation (CASC). CAST in turn contracted the Shanghai Aerospace System Engineering Institute to design and develop the spacecraft. 1) 2)
Chang'e-3 is part of the second phase of China's lunar program, which includes orbiting, landing and returning to the Earth. It follows the success of the Chang'e-1 and Chang'e-2 missions in 2007 and 2010, respectively.
Chang'e-3 is China's first lunar rover, and the first spacecraft in 37 years to make a soft landing on the moon, since the Soviet Luna-24 mission in 1976. It is named after Chang'e, the goddess of the moon in Chinese mythology, and is a follow-up to the Chang'e-1 (launch Oct. 24, 2007)and Chang'e-2 (launch Oct. 1, 2010) lunar orbiters. According to CNSA (China National Space Administration), the landing site of Chang'e-3 will be Sinus Iridum near the Mare Imbrium.

Spacecraft
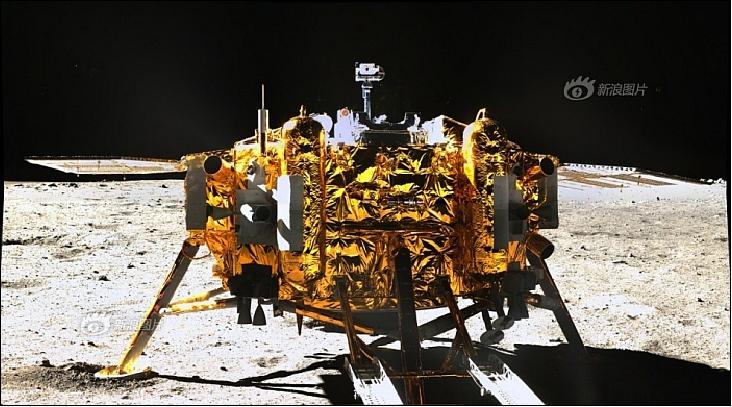
Chang'e 3 lunar probe consists of two modules — the LLV (Lunar Soft-Landing Vehicle), simply called "Lander", and the Lunar Surface Exploration Vehicle (Rover). The total launch mass of the lander and rover is about 3800 kg. Overall, the lander has a dry mass of 1200 kg and its landing legs create a vehicle span of 4.76 m. When standing on the surface, the lander body rests 0.83 m above the ground. The lander includes all necessary equipment to fly from the Earth to the moon and perform a soft landing on its surface. Riding to the moon as a passenger is the small rover with a mass of ~ 120 kg. Both, the lander and rover, are equipped with a scientific payload.
The Chang'e-3 lander as well as the rover carry scientific payloads that are going to be used to study the moon, other galaxies and stars as well as the near-Earth space environment. The lander is expected to perform a science mission of at least one year, while the rover is hoped to be operational for three months or longer to explore the lunar surface.
China has named its first moon rover "Yutu", or jade rabbit, following an online poll seeking name proposals from the Chinese worldwide.
RTG (Radioisotope Thermoelectric Generator): The LLV (Lunar Landing Vehicle) is equipped with a RTG assembly to supply its power for the one year period of operation. The Chang'e-3 lander uses a combination of solar panels and a GPHS-RTG (General Purpose Heat Source-Radioisotope Thermoelectric Generator) to meet its power requirements. Two solar panels are installed on the vehicle to deploy in flight & after landing.
The RTG is of simple design using the thermal energy released by a radioactive material and converting it into electrical energy. Chang'e-3 uses 238 Plutonium Dioxide as RTG fuel. The radioactive Pu-238 decays by emitting alpha-particles which generate heat.
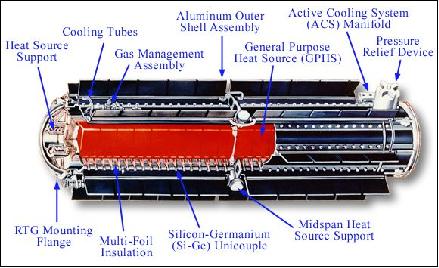
The RTG energy will be used to power the scientific payload of seven instruments and cameras.
TCS (Thermal Control Subsystem): The lunar surface environment is relatively harsh – days and nights are 14 Earth days in duration and surface temperatures vary from –175ºC during night to more than 100°C in the sun. Chang'e 3 uses a combination of active and passive thermal control systems. Blankets of multi-layer insulation cover large portions of the vehicle to protect it from excessive solar heating and from cooling when exposed to the vacuum of space during nighttime (Ref. 2).
The active thermal control system consists of resistive electric heaters that are actuated using thermostat data. Heater power is supplied by the solar arrays and batteries during the lunar day. Because Chang'e 3's batteries would not last over the 14 day lunar night, the heaters also use power provided by the RTG. The majority of power provided by the RTG is used for the heaters and a small fraction is used to sustain the lander's Lunar Night Sleep Mode in which all systems except for crucial control and housekeeping systems are shut down.
Propulsion subsystem: A number of requirements have been identified for the propulsion system of the Chang'e-3 lander. The system has to be operated multiple times in the mission in different environments including lunar orbit and the major landing burn. To perform a soft landing, the vehicle's main propulsion system needs to have throttle capability. In addition, Chang'e-3 needs a secondary propulsion system coupled with an attitude control system for minor trajectory corrections and vehicle attitude control. For the dynamic landing maneuver, the attitude control system has to be of a design that allows quick response to attitude actuation commands.
Chang'e-3 is equipped with a single main engine that was developed for the mission as China's first engine that can be throttled for space applications. The high specific impulse engine uses a pintle-type flowrate regulating device to adjust its thrust output. Using a ~60 cm nozzle with high area ratio, the engine is optimized for operation in vacuum conditions. The engine was baselined to provide 1,500 - 7,500 N of thrust , which is sufficient to lift/land the vehicle in the 1/6 G environment of the moon. The engine can be throttled with a very high accuracy of 7.5 N and features and active cooling system. Propellant tank pressurization is accomplished by using a high-pressure gas.
In addition to its main propulsion system, the Chang'e-3 lander also features a propulsive attitude control system, consisting of 28 thrusters that are installed on the smaller side panels of the vehicle, being canted to allow three-axis control. The system uses a combination of 150 N and 10 N thrusters. The lander features eight thruster modules – each consisting of two 150 N and one 10 N thrusters. The remaining four 10 N thrusters are installed separately, one on each of the smaller side panels.
Eight of the 150 N thrusters are oriented in an identical orientation for ΔV burns, using all or a a number of those engines. These eight 150 N thrusters are likely used for smaller trajectory correction maneuvers during the Earth-Moon transfer and small orbital adjustments, and possibly during LOI (Lunar Orbit Insertion) and landing.
The 10 N thrusters are used for attitude control and reorientation maneuvers. A combination of all ADCS (Attitude Determination and Control Subsystem) thrusters is used for attitude control during main engine burns. Using the relatively high-thrust 150 N engines for attitude control provides quick response capability which is required for fast attitude adjustments during the landing phase (Ref. 2).
Landing system: In the landing sequence, the Chang'e-3 lander is dropped from an altitude of 4 m above the lunar surface which required a cushioning landing system on the lander to create a fairly soft landing. The system also has to support the rover release that is performed after landing. A "cantilever-type" design has been selected for Chang'e-3.
The landing system utilizes four primary landing legs that are equipped with footpads to avoid sinking into the surface. The Chinese used previous lander designs and knowledge on the properties of the lunar dust to develop a landing system that minimizes mass while maximizing stability.
The primary landing struts facilitate bumpers with interior buffer elements to provide shock-absorbing capabilities. The legs are installed at an angle of 30º to the lander structure. Multi-functional and single-functional secondary struts are attached to the landing legs to provide additional attach points to the lander body.
Navigating system: Chang'e 3 makes a fully autonomous landing on the lunar surface without receiving any navigation data from Earth. To accurately find its landing site and perform a soft landing on the surface, the lander is equipped with a number of navigation systems.
The vehicle uses multiple sources of navigation information provided to its main computer to deduce accurate altitude and velocity data. The primary navigation system for the early phase of the descent from orbit is the lander's inertial navigation platform with built-in redundancy. It is used to measure the change in velocity imparted by the engine burn to determine when the required ΔV target is reached.
Range and velocity measurements are also provided by a large dynamic range LRS (Laser Ranging System) and a microwave range sensor that become active once the vehicle has reached a certain altitude and orientation above the lunar surface. (Initially, the vehicle flies horizontally, making a retrograde braking burn before changing its attitude for a vertical descent.)
Once in its hovering segment, about 100 m above the lunar surface, the lander will start acquiring images using its descent camera. The computer will be using a newly developed obstacle-recognition algorithm using optical images and 3D elevation data. Flying horizontally, the lander autonomously finds a flat spot for landing, avoiding any obstacles that can be detected using its systems.
For the final descent, the lander uses a GRA (Gamma-Ray Altimeter) that provides precise altitude data to the vehicle. This sensor is used to detect the 4m engine cutoff point above the lunar surface.
RF communications: Use of X-band data transmission. A miniature X-band deep space transponder was demonstrated in the Chang'e-2 mission. The system is also used for the Chang'e-3 mission.
Rover Design - Yutu (Jade Rabbit)
The rover vehicle has a mass of ~ 120 kg, including a payload mass of 20 kg. It features a mast that facilitates the vehicle's stereo and navigation cameras and communication antenna, standing about 1.5 m tall. The rover body is a rectangular cuboid that features solar panels and a robotic arm, that holds part of the instrument payload. The rover is expected to survive three months in the harsh environment on the lunar surface – three lunar days & nights.
The rover uses two rectangular solar panels that are locked on the top deck of the rover for launch and descent and deploy shortly after landing. Using the panels to generate electrical power, the rover operates throughout the two weeks of lunar day and charges its battery to survive the long lunar night. In its lunar night sleeping mode, the rover is powered down to a large extent, only running core functions such as health monitoring and powering survival heaters.
The rover rover uses a six-wheeled main- and sub-rocker-bogie suspension system. The vehicle features rockers on each side of the suspension system that are connected to each other and the rover chassis through a differential. This technique allows the rover to maintain balance – when one rocker goes up because the vehicle is driving over a small obstacle, the other side goes down. One end of a rocker is outfitted with a wheel while the other is pivoted to a bogie.
This design allows the rover to climb over obstacles while keeping all six wheels on the ground. The tilt stability of the rover depends on the height of its center of gravity.
The six rover wheels are individually powered by six brushless DC motors. According to computer animations showing the rover, the steering motors are used on the front and rear wheels which would allow the rover to turn in place. Each wheel has cleats that provide grip when driving through the fine lunar regolith.
The Chang'e 3 rover can tolerate slopes of up to 20º and drive over obstacles of up to 20 cm in size. Overall, the rover has been conceptualized for a total driving distance of up to 10 km.
Rover control and navigation: The rover uses an onboard Delaunay algorithm that analyzes imagery acquired by the Navigation and Hazard Avoidance Cameras in real-time, using a stereo imagery analysis tool. This way, the rover is able to recognize obstacles and hazards that are automatically avoided. Furthermore, the rover is able to identify driving targets and autonomously plan the path towards the target location constantly determining its own attitude using its onboard sensors and identifying its relative position using real-time imagery.
Yutu is is capable of autonomously navigating around, avoiding obstacles, selecting the most optimized routes and locations for exploration activities. A mechanical collector, designed by the Hong Kong Polytechnic University, allows the vehicle to collect lunar soil samples for analysis.

Rover accommodation: The Chang'e-3 rover is firmly attached to the top deck of the lander. One of the challenges of the lander design was to find a way to get the rover down to the surface from the top deck of the lander while minimizing overall spacecraft mass.
Following landing on the moon, the connection between the lander and the rover is severed using unspecified methods. Two ramps, stowed in the vertical position on the side panel of the lander, are deployed to a horizontal position so that the rover can roll onto them from the top deck.
Then, the ramp is carefully lowered using an electromechanical system to touch the surface and maintain an angle within the rover's mobility system specifications, so that the vehicle can safely roll off the ramp and begin its own surface exploration mission.

Note: This description is mainly based on third-party information due to the fact that published papers by the Chang'e-3 project were not available. A good opportunity of more openness was missed at the 64th International Astronautical Congress (IAC 2013) in Beijing, Sept. 23-27, 2013, when only papers of the Chang'e-1 and Chang'e-2 missions were presented in the proceedings. - Fortunately, China's state media provided live TV coverage of the Chang'e-3 mission launch as well as of the lunar landing. This was indeed great progress. The global Space and Earth Observation Communities are looking forward to the day, when a similar "great leap forward" will be made in China's policies in providing proper technical publications of current and future spacecraft missions. Openness is a strength and not a weakness.
Launch
The Chang'e-3 spacecraft was launched on Dec. 1, 2013 (17:30 UTC) on a Long March 3B vehicle (CZ-3B) from XSLC (Xichang Satellite Launch Center) in the Sichuan Province of China. 3) 4)
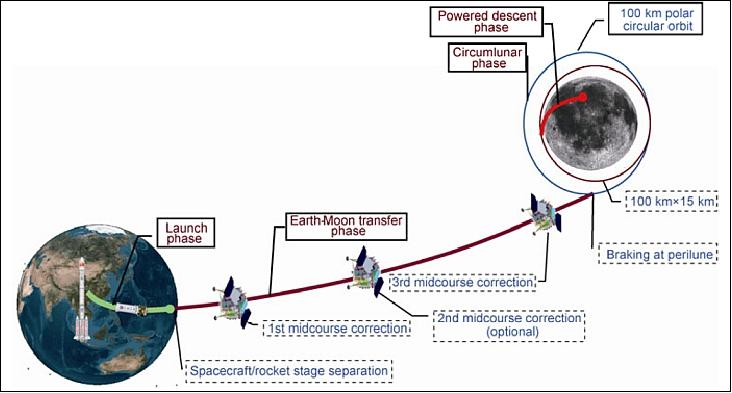
Orbit: After its trans-lunar trajectory, the spacecraft will be placed into a 100 km x 100 km lunar orbit.
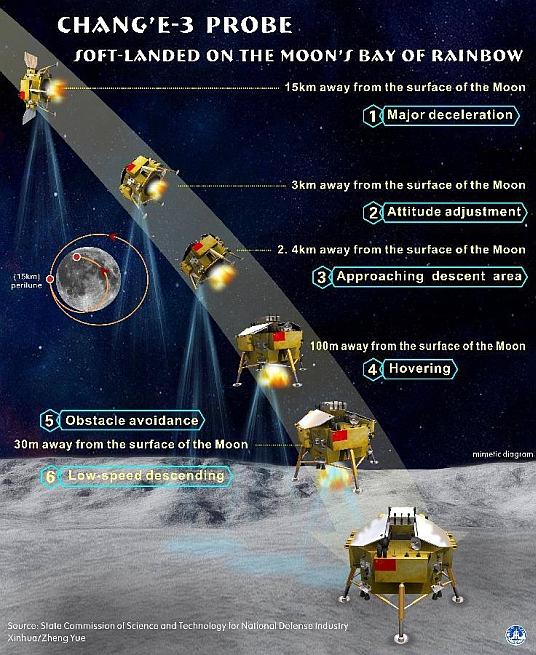
After separating from the Service Module, the Lunar Landing Vehicle will descend to a 100 km x 15 km elliptical orbit inclined at 45º. When reaching the 15 km perigee, the vehicle will ignite its variable thrusters to reduce its velocity, so that it slowly descends to 100 m above the moon's surface. The vehicle will hover at this altitude, moving horizontally under its own guidance to avoid obstacles, and then slowly descend to 4 m above the ground, at which point its engine will shut down for a free-fall onto the lunar surface. The landing site will be at Sinus Iridum, at a latitude of 44º.
ESA (European Space Agency) assisted with additional tracking from before landing to several hours after touchdown using the New Norcia and Cebreros stations in Australia and Spain.
Mission Status
• August 3, 2016: China's Yutu moon rover (Jade Rabbit) exploring the lunar surface, has stopped operating after a record-setting mission of 31 months, according to an announcement of SASTIND (State Administration for Science, Technology and Industry for National Defense). 5) 6)
- Chang'e-3, China's first lunar lander, has operated on the moon for 31 months, exceeding its design life by 19 months. Chang'e-3 entered its 33th lunar night on July 28, 2016. A lunar night lasts approximately 14 earth days.
- According to SASTIND, the Chang'e-3 has collected a large amount of scientific data, and the Jade Rabbit, far exceeding its design life of three months, completed many challenging missions for Chang'e-3, such as obtaining images of the moon's geological layers for the first time.
• February 23. 2016: China's first moon lander, Chang'e-3, awakened automatically on Feb. 18 after "sleeping" during the lunar night, entering its 28th lunar day, China's SASTIND (State Administration of Science, Technology and Industry for National Defense) announced on Feb. 19. - One lunar day lasts approximately 14 Earth days. The spacecraft has stood the test of extreme low temperatures during 27 lunar nights since its successful soft landing on the moon in December 2013, according to a statement by SASTIND. 7) 8)
- Although the moon lander has already exceeded its design life by 14 months, the astronomical telescope and other surveying devices it is carrying still work well. The engineering and scientific data it has transmitted will pave the way for scientific research and future lunar probes, and the data is globally accessible, SASTIND said.
• October 2015: The Chang 'e-3 Lander has successfully completed the mission objective of one year operation on the lunar surface. 9)
Based on the flight results of the Chang'e-3 lander, the control effect in the soft landing process, the thermal effect of plume, the interaction between the plume and the lunar dust, the property of the lunar soil and the degradation of the thermal control material OSR (Optical Solar Reflectors) are analyzed and the conclusions are the following:
1) The relay hazard avoidance method applied by the Lander, which includes the large-scale rough-hazard avoidance, the three-dimensional imaging in hovering status, the small-scale precise-hazard avoidance of the final landing site, but also guarantees the realizability of hazard avoidance by a large-scale maneuver of the lander. The landing accuracy is better than 0.6 km.
2) The design of the thermal protection equipment of the plume is effective. The absorption ration of the thermal protection surface of the cushion mechanism for the engine plume and the effective emissivity multi-layer insulation material can be modified using the telemetry data and is beneficial for the optimization of future missions.
3) The effect of engine plume on the lunar dust occurs when the Lander is less than 21 m above the lunar surface. When the Lander is 7 m above the lunar surface, the plume causes the obvious movement of small particles on the lunar surface. The plume effect does not form obvious pits on the lunar surface. The simulation and analysis results basically match the results.
4) Based on the computation of the stroke of the landing cushion mechanism, the plume bearing capacity of the lunar soil is slightly smaller than the value in the literature.
5) The degradation rate of the OSR on the lunar surface is much higher than the OSR on the Earth-orbit satellite, the solar absorption of OSR rises from 0.15 at the time of landing to 0.21 after a year on the lunar surface.
• In early 2015, the Chang'e-3 lander is operational after 1 year of its lifetime, continuing on some further tests. So far, Chang'e-3 experienced 13 lunar days and nights, and survived from the twice Lunar eclipse. All of the instruments are operational obtaining the scientific data according to the plan. About 3 TB of data have been collected. 10)
• In May 2014 when the Chang'e-3 mission entered the 6th moonnight, the Yutu lunar rover's capability had been gradually cut down.
• March 7, 2014: LROC/NAC (Lunar Reconnaissance Orbiter Camera/Narrow Angle Camera) camera aboard NASA's (Lunar Reconnaissance Orbiter) mission has captured spectacular new images detailing the traverse of China's Yutu moon rover around the landing site during its first two months exploring the Moon's pockmarked grey terrain. 11)
The newly released high resolution LRO images even show Yutu's tracks cutting into the lunar surface as the famous Chinese robot drove in a clockwise direction around the Chang'e-3 lander that delivered it to the ground in mid-December 2013.
Legend to Figure 7: The image is a composite view of China's Yutu rover and tracks driving in clockwise direction around Chang'e-3 lander from above and below (orbit and surface). The Chang'e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA's LRO orbiter shows the Yutu rover after it drove down the ramp to the moon's surface and began driving around the landers right side and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu's positions over time.
• March 3. 2014: Yutu suffered a control circuit malfunction in its driving unit which prevented Yutu from entering the second dormancy as planned. A functioning control circuit is required to lower the rovers mast and protect the delicate components and instruments mounted on the mast from directly suffering from the extremely harsh cold of the Moon's recurring night time periods. The high gain communications antenna and the imaging cameras are attached to the mast. They must be folded down into a warmed electronics box to shield them from the damaging effects of the Moon's nightfall when temperatures plunge dramatically to below -180ºC. 12)
• On Feb. 22, 2014, the Yutu lunar rover entered its 3rd Lunar night time hibernation period, but serious technical troubles persist Chinese space managers confirmed. Xinhua, China's official government news agency reported that mechanical control issues are unresolved which might cripple the vehicle. 13)
• Feb. 13, 2014: China's troubled Yutu lunar rover has survived a bitterly cold 14-day lunar night, prompting hopes it can be repaired after suffering a malfunction last month. 14) 15)
• Jan. 26, 2014: Yutu has just suffered a significant mechanical setback right at the start of her 2nd lunar night, according to an official announcement from Chinese space officials made public this weekend. Yutu has "experienced a mechanical control abnormality" in a new report by China's official government newspaper, The People's Daily. 16)
- Yutu was traversing southwards from the landing site as the incident occurred just days ago – about six weeks into its planned 3 month moon roving expedition. However very few details have emerged or been released by the Chinese government about Yutu's condition or fate.
• Jan. 13. 2014: With the lunar day starting again at the Chang'e-3 landing site, Yutu woke up on January 11 while the lander was awoken on Jan. 12, 2014 according to BACC. Both vehicles depend on their life giving solar panels to produce power in order to function and accomplish their scientific tasks. 17)
- During the nocturnal hiatus they were kept alive by a radioisotopic heat source that kept their delicate computer and electronics subsystems warmed inside a box below the deck. It was maintained at a temperature of about minus 40 degrees Celsius to prevent debilitating damage. During the lunar night, the lander and the rover were in a power-off condition and the communication with Earth was also cut off.
- Now with the dawn of daylight the solar panels were unfurled and the instruments activated on both robots. Yutu has already resumed roving towards pristine, unexplored lunar terrain surrounding the touchdown zone at Mare Imbrium, nearby the Bay of Rainbows, or the Sinus Iridum region.
• Dec. 26, 2013: The moon rover and lander of China's Chang'e-3 lunar probe mission will "sleep" during the lunar night, enduring extreme low temperatures on the lunar surface. The lunar night is expected to begin on Dec. 26, will last for about two weeks. During their "sleep", both lander and rover will have to tolerate temperatures of -180ºC. 18)
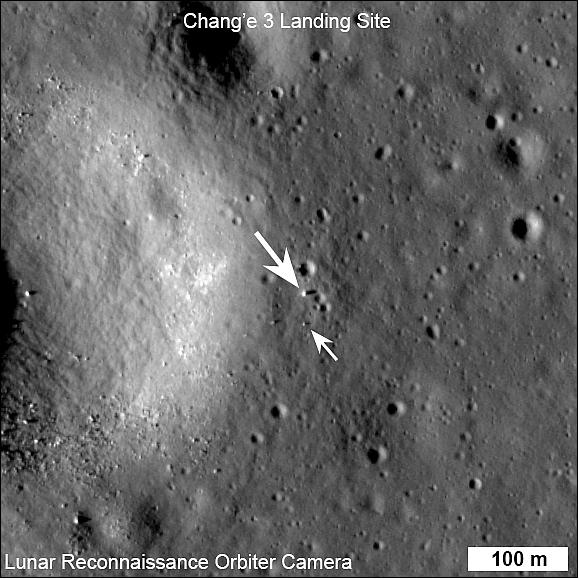
• On December 25, 2013, NASA's LRO (Lunar Reconnaissance Orbiter) was in position to acquire the image (Figure 8), showing the lander and the 120 kg "Jade Rabbit" rover at their location near the Moon's Sinus Iridum region. The swath width of the NAC (Narrow-Angle Camera) image is 576 m; north is up. LRO was about 150 km from the Chang'e-3 site when the image was acquired. 19)
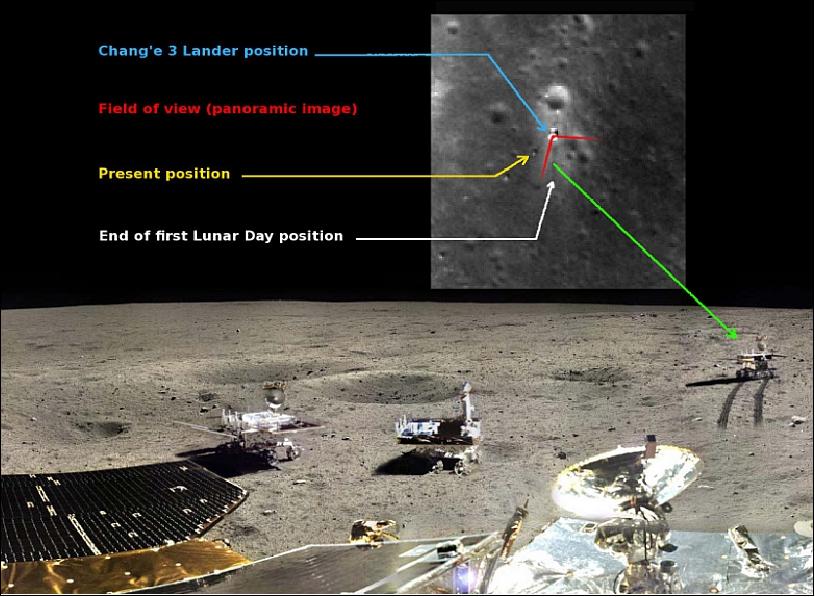
• Dec. 22, 2013: China's Chang'e-3 lunar lander has snapped the missions first panoramic view of the touchdown spot at Mare Imbrium. Chinese space officials have now released the surface imagery captured by the Chang'e-3 mothership on Dec. 15, via a video news report on CCTV. 20)

• Dec. 20, 2013: The precise landing coordinates of Chang'e-3 were 44.1260ºN and 19.5014ºW -located below the Montes Recti mountain ridge and about 40 km south of the 6 km diameter crater known as Laplace F. 21)
• On Dec. 14, 2013 (20:35 UTC), China's first ever lunar rover, Yutu (Jade Rabbit), rolled onto the moon's soil, about 7 hours after the Chang'e-3 mothership touched down atop the lava filled plains of the Bay of Rainbows. 22) 23) 24) 25)
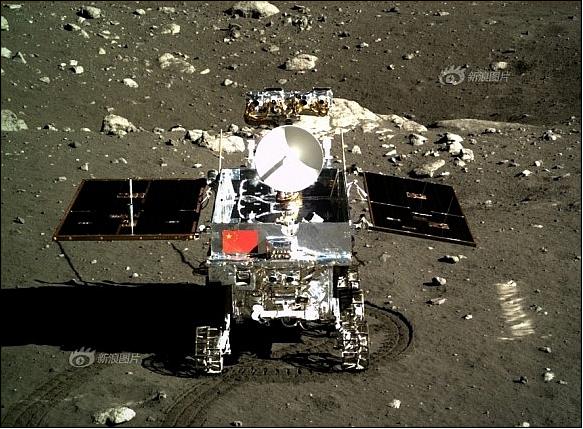
Legend to Figure 11: The rover's wheels left behind noticeable tire tracks as it drove across the loose lunar topsoil. The Chang'e-3 lunar lander and rover beamed back portraits of one another snapped from the moon's surface – that also proudly displayed the bright red Chinese national flag shining atop on the Jade Rabbit as it stands on the moon's surface. The color images were transmitted live to the BACC (Beijing Aerospace Control Center), where Chinese President Xi Jinping and Premier Li Keqiang watched the broadcast.
The rover will spend about three months exploring the moon's surface and looking for natural resources. It can climb slopes of up to 30 º and travel at 200 m/hour, according to the Shanghai Aerospace Systems Engineering Research Institute.
- Despite pre-mission announcements about a planned landing in the "Bay of Rainbows" (Sinus Iridum in the approved Latin nomenclature of the moon), the spacecraft actually set down in the northern region of the "Sea of Rains" (Mare Imbrium), the far eastern edge of its designated landing box. Whether by design or fortuitous accident, this site is actually more interesting geologically than the spacecraft's original destination. 26)
NASA will keep track of the Chinese Yutu rover and lander when LRO (Lunar Reconnaissance Orbiter) orbits over western Mare Imbrium on Dec. 24 and 25.
• Chang'e-3 landed on the moon on Saturday Dec. 14, 2013 (13:11:18 UTC), transmitting still video frames all the way down. This makes China the world's third nation to achieve a lunar soft landing. The landing, nearly two weeks after blast-off, was the first of its kind since the former Soviet Union's mission in 1976. NASA's last soft lunar landing came in 1972, on the Apollo 17 mission. 27) 28)
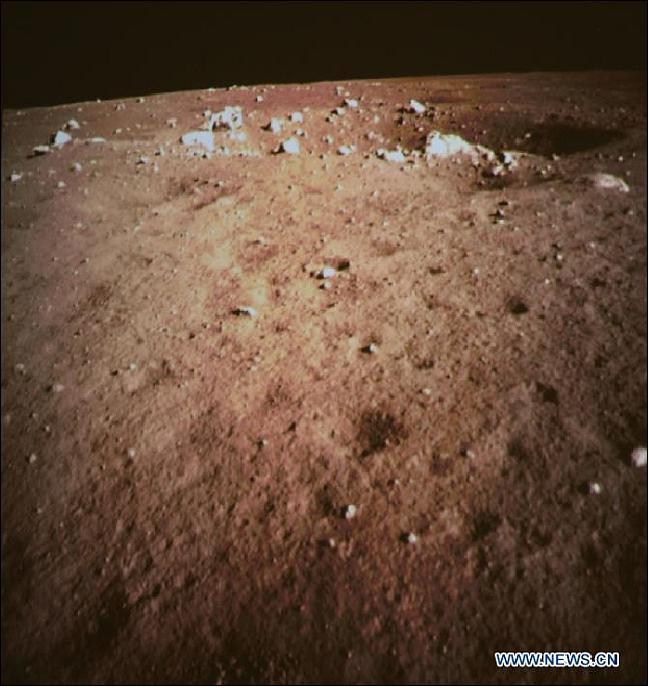
- The probe touched down on a 400 km wide plain known as "Sinus Iridum", or the Bay of Rainbows. Before landing on the lunar surface, the probe decelerated from periapsis (15 km above lunar surface), from a speed of 1,700 m/s and then hovered for about 20 seconds, using sensors and 3D imaging to identify a flat area. During the descent the attitude of the probe was controlled using 28 small thrusters.
- The thrusters were then deployed ~100 m above the lunar surface to gently guide the craft into position. The landing process lasted for about 12 minutes.
- Four minutes after landing, the Chang'e-3 unfolded its solar panels to provide energy to the lander and rover.
- Chang'e-3 relied on auto-control for descent, range and velocity measurements, finding the proper landing point, and free-falling.
• On Dec. 10, 2013, Chang'e-3 entered an orbit closer to the moon. Following commands sent from BACC, the probe descended from the 100 km high lunar circular orbit to an elliptical orbit with its nearest point (periapsis) about 15 km away from the moon's surface and the apoapsis at 100 km. 30)
• On Dec. 6, 2013, the Chang'-3 lunar probe entered the moon's orbit. Engineer's at the BACC (Beijing Aerospace Control Center) commanded the Chang'e-3 lunar probe to fire its braking thrusters for 361 seconds, according to China's Xinhua news agency. The critical engine burn placed Chang'e-3 into its desired 100 km high circular orbit above the moon's surface. 31) 32)
• The Chang'e-3 mission experienced a trouble-free flight towards the moon, with the spacecraft entering a reported lunar orbit at 210.3 km x 389109.2 km with an inclination of 28.5º. Three orbital corrections were required with the first taking place at 07:50 UTC on December 2, followed by a second at 08:20 UTC on December 3. 33)
Lander Sensor Complement
The payload control systems on both, the Chang'e-3 lander and Yutu rover, are built by the Technology and Engineering Center for Space Utilization of CAS. 34) 35)
MastCam
The MastCam was developed by the IOE (Institute of Optics and Electronics) of CAS (Chinese Academy of Sciences). Positioned on the top of the mast of the lander, the MastCam will be used for acquisition of landing area optical photographs, for surveying the terrain and geological features of the landing zone. The camera will also monitor the movement of the rover on the lunar surface having a multi-color imaging ability. It can shoot both photographs and videos, tweak the focusing automatically, and has the ability to minimize scattered lights and image compression. Its major systems are a optical system and a mechanical system.
Descent Camera
The Descent Camera was developed by BISME (Beijing Institute of Space Machinery and Electricity) of CAST (China Academy of Space Technology ). Positioned on the bottom of the lander the Descent Camera will make the acquisition of the landing area optical photographs for surveying the terrain and geological features of the landing zone at altitudes between 4-2 km . It has a highly miniaturized design; light weight, small volume, low energy consumption and high performance. It can withstand high levels of radiation, temperature difference and violent vibrations at launch. The camera uses a CMOS detector (1280 x 1024 pixels) and also a high-speed static grey-scale image compression. It has an automatic focusing. Its main systems are an optical system and an imagery receiving and processing electric box.

LUT (Lunar-based Ultraviolet Telescope)
LUT was developed by NAOC/CAS (National Astronomy Observatory of China/Chinese Academy of Sciences). LUT will make use of the absence of an atmosphere and slow rotation of the moon to observe selected variable celestial objects and sky areas in the near ultraviolet region. The telescope is positioned on the -Y side of the lander. Its major subsystems are the telescope body and frame, the reflector lens and telescope mount, and the electric cable mount and control systems. This will be the first ever astronomical observation made from the surface of other planetary objects for prolonged periods. The LUT is highly automated and can aim and point to various targets with the telescope mount automatically. Its light low mass was achieved using composite materials and structure optimization, and LUT is highly adaptable to the lunar surface environment. It can operate between -20 to +40ºC.
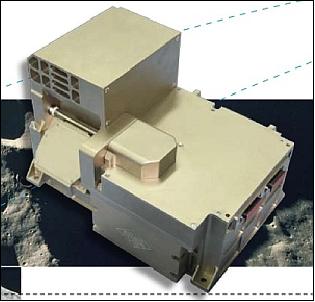
EUV (Extreme Ultraviolet Imager)
The Changchun Institute of Optics, called CIOMP (Fine Mechanics and Physics) of CAS, developed the EUV imager. Located on the top side of the lander, the EUV will provide imagery of the Earth's ionosphere in the extreme ultraviolet region and will make investigations into space weather forecasting and ionosphere studies. It can track Earth automatically, performing long-term imagery monitoring of scattered extreme ultraviolet radiation from the Earth's ionosphere. The operational wavelength is 30.4 nm (about 1/20 of visible light) and the FOV (Field of View) is 15 º (the region covers about 7.5 Earth diameters). The EUV can operate between -25 and +75º C and has an ability to survive and operate in the highly variable thermal environment of the lunar surface. This is the first extreme ultraviolet camera operating from the lunar surface. Its main subsystems are the extreme ultraviolet multi-membrane optical imagery system, the extreme ultraviolet photon counter sensor, a signal processing unit, the pointing control system, and the main control unit.
The objective of the EUV camera is to observe Earth's plasmasphere. The plasmasphere is located within Earth's magnetosphere and consists of low-energy (low-temperature) plasma located above the ionosphere. The outer boundary of the plasmasphere, the plasmapause, is characterized by a sudden drop in plasma density by the order of one magnitude.
The plasmasphere has been known for relatively well organized particle motion due to the geomagnetic field causing the plasmasphere to co-rotate with Earth. However, recent observations of the plasmasphere are pointing to density irregularities caused by a number of processes. Also, recent observations have shown that the plasmasphere does not always co-rotate.
Observations of the plasmasphere are possible by detecting resonantly scattered solar radiation at 30.4 nm caused by plasmaspheric He+ ions. He+ is the second most abundant ion in the plasmasphere making up to 15% of the total plasma density so that measurements of He+ ions can be used to measure overall plasmaspheric properties such as density and temperature.

The camera head is installed on the top deck of Chang'e-3 using a Pan and Tilt Targeting Mechanism. The instrument uses a multi-membrane optical system and a EUV photon counter sensor as detector. Studying the 30.4 nm radiation from the moon allows Chang'e-3 to observe the entire plasmasphere including the plasmapause and plumes on a global scale to examine its structure and dynamics. Images provided by the EUV imager are put through an algorithm to create three-dimensional models of Earth's plasmasphere.
Rover Sensor Complement
PanCam
PanCam was developed by the Xian Institute of Optics and Precision Mechanics (OPT) of CAS. Located on the top mast of Yutu, the objective of the PanCams is to acquire 3D imagery of the lunar surface for surveying the terrain, geological features and structures, and craters inside the target region. It will also monitor the operational state of the lander.
The PanCams use a simplified optical system and a highly miniaturized design, making the camera low-mass, small volume, low energy consuming and highly reliable. It can operate between -25 and +55ºC and is able to survive between -40 and +75ºC. The focusing of its optical system is operational between 3m and infinity and it has both automatic and manual focusing, being able to automatically adjust the field brightness. Its main subsystems are the twin PanCams (A & B), each with one optical system, mechanical system, electronics and thermal control parts.

GPR (Ground Penetration Radar)
GPR was developed by the Institute of Electronics of CAS. The instrument is mounted on the underside of Yutu. The objective of the GPR is to measure the lunar soil depth and the structural distribution of soil, magma, lava tubes and sub-surface rock layers. The GPR features two channels: Channel I operates at 60 MHz - for probing the sub-surface geological features down to meter-level resolution with a maximum depth >100 m; Channel II operates at 500 MHz - for probing the lunar soil depth with a resolution of better than 30 cm up to a maximum depth of >30 m. The antennas can survive temperatures of -200 to+120ºC. GPR has a miniaturized design, low energy consumption, high performance. Its major subsystems are composed of a radar controller, channel I/II antennas and transmitter, electric cables.
Determining the sub-surface structure to these depths allows studies of the geologic and thermal history of the moon and assessments of the quantity of potential resources for future lunar exploration.
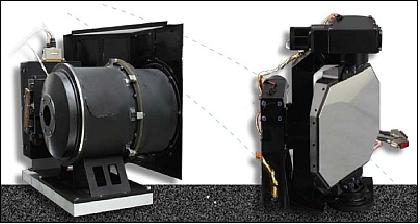
VNIS (VIS/NIR Imaging Spectrometer)
VNIS was developed by SITP/CAS (Shanghai Institute of Technical Physics). The objective of VNIS is to make in-situ measurements of the composition and resources of the lunar surface via imaging and spectrometry in the visible and near-infrared wavelengths (spectral range: 0.45-2.4 µm). Located beneath the rover's top deck, it employs the concept of RF-driven tunable light & ultrasound spectrometry, using new design ultrasound generators. This spectrometer has an anti-dust accumulation and in-orbit calibration functions. It features a miniaturized design with low mass and high performance. The major subsystems are the tunable light and ultrasound spectrometer optical system, ultrasound-driven target guiding, dust repelling and thermal control components, composite outer case, main control system and data processing module.
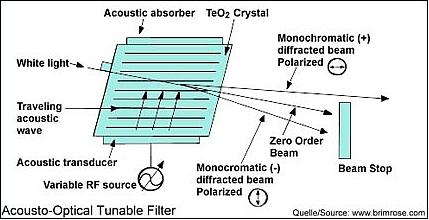
VNIS is a FOV of 6º x 6º for the visible spectrum and a FOV of 3º x 3º for the NIR band. The instrument achieves a spectral resolution of under 8 nm for the 450-950 nm band, and under 12 nm for the 900-2400 nm band, using a continuously tunable RF frequency of 40 to 180 MHz.
APXS (Alpha Particle X-Ray Spectrometer)
APXS was developed by IHEP (Institute of High Energy Physics) of CAS. The objective is to measure the composition and distribution of various elements on the lunar surface by observing the scattered X-rays from the bombardment of alpha particles on rocks. Located on the rover's robotic arm, APXS is capable of active particle scattering, in-situ determination of lunar surface elements, in-orbit calibration and distance measurement functions. The sensor can re-calibrate itself through the use of standard calibration targets, and the rover's lunar night survival contains a RHU (Radioisotope Heater Unit) for keeping the sensor warm. It has low energy consumption, low mass, high resolution, and high sensitivity semi-conductor sensors are used.
References
1) "Chang'e 3," Dragon in Space, URL: http://www.dragoninspace.com/planetary/change3.aspx
2) Patrick Blau, "Chang'e 3 - Mission Overview," Spaceflight 101, URL: http://www.spaceflight101.com/change-3.html
3) Wikipedia, December 1, 2013, URL: http://en.wikipedia.org/wiki/2013_in_spaceflight#December
4) Leonard David, "China's 1st Moon Rover Launches On Lunar Journey," Space.com, Dec. 1, 2013, URL: http://www.space.com/23790-china-launches-moon-rover-mission.html
5) "China's lunar rover Jade Rabbit retires," China Daily Asia, Aug. 3, 2016, URL: http://www.chinadailyasia.com/nation/2016-08/03/content_15472628.html
6) "Chinese Yutu Moon Rover pronounced Dead after record-setting Mission," Spaceflight 101, August 3, 2016, URL: http://spaceflight101.com/change/chinese-yutu-moon-rover-pronounced-dead/
7) "China's moon lander Chang'e-3 enters 28th lunar day," Space Daily, Feb. 23, 2016, URL: http://www.spacedaily.com/reports/Chinas_moon_lander_Change_3_enters_28th_lunar_day_999.html
8) "China's moon lander Chang'e-3 enters 28th lunar day," China.org.cn, Feb. 20, 2016, URL: http://www.china.org.cn/china/2016-02/20/content_37832335.htm
9) He Zhang, Ming Li, Zezhou Sun, Xueying Wu, Chuang Wang, Jinan Ma, Youwei Zhang, "Flight results of Chang'e-3 Lander," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A3.2A.3
10) Y. Tang, "Progress of Chinese Lunar Exploration Program," 52nd session of the Scientific and Technical Subcommittee, UNOOSA (United Nations Office for Outer Affairs), Vienna, Austria, Feb. 2-13, 2015, URL: http://www.unoosa.org/pdf/pres/stsc2015/tech-06E.pdf
11) Ken Kremer, "NASA Lunar Orbiter snaps Spectacular Images of Yutu Moon Rover driving around Chang'e-3 Lander," Universe Today, March 7, 2014, URL: http://www.universetoday.com/110020/nasa-lunar-orbiter-snaps-spectacular-images-of-yutu-moon-rover-driving-around-change-3-lander/
12) Ken Kremer, "China's Yutu Moon Rover Unable to Properly Maneuver Solar Panels," Universe Today, March 3, 2014, URL: http://www.universetoday.com/107332/chinas-yutu-moon-rover-unable-to-properly-maneuver-solar-panels/
13) Ken Kremer, "Yutu Moon Rover Starts 3rd Night Time Hibernation But Technical Problems Persist," Universe Today, Feb. 23, 2014, URL: http://www.universetoday.com/109671/yutu-moon-rover-starts-3rd-night-time-hibernation-but-technical-problems-persist/
14) "China's Jade Rabbit rover comes 'back to life': Xinhua," Space Daily, February 13, 2014, URL: http://www.spacedaily.com/reports/Chinas_Jade_Rabbit_rover_comes_back_to_life_Xinhua_999.html
15) Ken Kremer, "China's Yutu Moon Rover Alive and Awake for 3rd Lunar Day of Exploration despite Malfunction," Universe Today, Feb. 13, 2014, URL: http://www.universetoday.com/109326/chinas-yutu-moon-rover-alive-and-awake-for-3rd-lunar-day-of-exploration-despite-malfunction/
16) Ken Kremer, "Yutu rover Suffers Significant Setback at Start of 2nd Lunar Night," Universe Today, Jan. 26, 2014, URL: http://www.universetoday.com/108576/yutu-rover-suffers-significant-setback-at-start-of-2nd-lunar-night/
17) Ken Kremer, "China's Historic Moon Robot Duo Awaken from 1st Long Frigid Night and Resume Science Operations," Universe Today, Jan. 13, 2014, URL: http://www.universetoday.com/108054/chinas-historic-moon-robot-duo-awaken-from-1st-long-frigid-night-and-resume-science-operations/
18) "China's moon rover "sleeps" through lunar night," Space Travel, Dec. 26, 2013, URL: http://www.space-travel.com/reports/Chinas_moon_rover_sleeps_through_lunar_night_999.html
19) Jason Major, "China's Lunar Lander Spotted by Orbiting Spacecraft," Universe Today, Dec. 30, 2013, URL: http://www.universetoday.com/107603/chinas-lunar-lander-spotted-by-orbiting-spacecraft/
20) Ken Kremer, "China's 1st Lunar Lander snaps 1st landing site Panorama," Universe Today, Dec. 22, 2013, URL: http://www.universetoday.com/107388/chinas-1st-lunar-lander-snaps-1st-landing-site-panorama/
21) Ken Kremer, "Stunning Chang'e-3 Lunar Landing Video gives Astronauts Eye View of Descent & Touchdown," Universe Today, Dec. 20, 2013, URL: http://www.universetoday.com/107369/stunning-change-3-lunar-landing-video-gives-astronauts-eye-view-of-descent-touchdown/
22) "China's Jade Rabbit lunar rover sends first photos from moon," Space Daily, Dec. 16, 2013, URL: http://www.spacedaily.com/reports/Chinas_Jade_Rabbit_lunar_rover
_sends_first_photos_from_moon_999.html
23) Ken Kremer, "Chinese rover & lander beam back Portraits with China's Flag shining on Moon's Surface," Universe Today, Dec. 15, 2013, URL: http://www.universetoday.com/107226/chinese-rover-lander-beam-back-selfies-with-chinas-flag-shining-on-moons-surface/
24) Patrick Blau, "Chang'e 3 Mission Updates," Dec. 15, 2013, URL: http://www.spaceflight101.com/change-3-mission-updates.html
25) Ken Kremer, "China's Yutu Moon Rover and Chang'e-3 Lander – Gallery of New Images & 1st Earth Portrait," Universe Today, January 12, 2014, URL: http://www.universetoday.com/107972/chinas-yutu-moon-rover-and-change-3-lander-gallery-of-new-images-1st-earth-portrait/
26) Paul D. Spudis, "A New Site to Explore on the Moon," Air&Space ASmithonian, Dec. 15, 2013, URL: http://blogs.airspacemag.com/moon/2013/12/a-new-site-to-explore-on-the-moon/
27) "China Focus: China's lunar probe soft-lands on moon," Xinhua, Dec. 14, 2013, URL: http://news.xinhuanet.com/english/china/2013-12/14/c_132968305.htm
28) "China deploys 'Jade Rabbit' rover on moon," Space Daily, Dec. 14, 2013, URL: http://www.spacedaily.com/reports/China_deploys_Jade_Rabbit_rover_on_moon_Xinhua_999.html
29) Hou Qiang, "Lunar probe Chang'e-3 sends back photos of moon surface," Xinhua, Dec. 15, 2913, URL: http://news.xinhuanet.com/english/photo/2013-12/15/c_132968354_2.htm
30) "Chang'e-3 probe moves closer to the moon," Space Daily, Dec. 13, 2013, URL: http://www.spacedaily.com/reports/Change_3_probe_moves_closer_to_the_moon_999.html
31) Ken Kremer, "China's Maiden Moon Rover Mission Chang'e 3 Achieves Lunar Orbit," Universe Today, Dec. 7, 2013, URL: http://www.universetoday.com/107002/chinas-maiden-moon-rover-achieves-lunar-orbit/
32) "China moon rover enters lunar orbit: Xinhua," Space Daily, Dec. 6, 2013, URL: http://www.spacedaily.com/reports/China_moon_rover_enters_lunar_orbit_Xinhua_999.html
33) "China's Chang'e-3 and Jade Rabbit duo land on the Moon," NASA Spaceflight.com, Dec. 14, 2013, URL: http://www.nasaspaceflight.com/2013/12/china-jade-rabbit-lunar-arrival/
34) Chris Bergen, URL: http://forum.nasaspaceflight.com/index.php?topic=33511.msg1132545#msg1132545
35) "Chang'e-3's Progress and Achievement," Proceedings of the 51st Session of Scientific & Technical Subcommittee of UNCOPUOS, Vienna, Austria, Feb. 11-22, 2014, URL: http://www.unoosa.org/pdf/pres/stsc2014/tech-08E.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top