CSTB1 (CubeSat TestBed 1)
Non-EO
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 17 Apr 2007 |
| End of life date | 01 Nov 2009 |
CSTB1 (CubeSat TestBed 1)
CSTB1 is a CubeSat technology demonstration mission of the Boeing Corporation developed by the IDS (Integrated Defense Systems) advanced systems team of engineers at Huntington Beach, CA, USA. 1)
The primary mission goals of CSTB1 were to mature and evaluate commercial low power processors, CMOS ultra low power imagers, and associated software algorithms in the space environment, and to provide validation of using integrated attitude determination sensors as part of the multifunctional side panels. Secondary missions included validation of the mission operations center and rapid prototyping processes in a small team environment. 2)
In the development process, the team members have collectively learned a skill that is important to any company these days: to think 'Lean' and to create quality products very inexpensively.

Spacecraft
The CSTB1 satellite conforms to the CubeSat standard for a single 1U CubeSat (10 cm sidelength and a mass of ≤ 1 kg). CSTB1 consists of eight basic functional subsystems: 1) Command and Data Handling, 2) Attitude Determination and Control, 3) Telemetry and Command 4) Electrical Power Subsystem, 5) Structure, 6) Mechanisms, 7) Thermal management, and 8) Bus Flight Software.
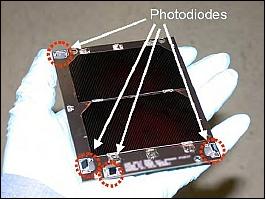
Many of these functional subsystems are physically integrated together as multifunctional elements. For example, the attitude determination sensors and solar cells are integrated on a side panel, PCB boards, which also act as structural elements for CSTB1 (Figure 4).
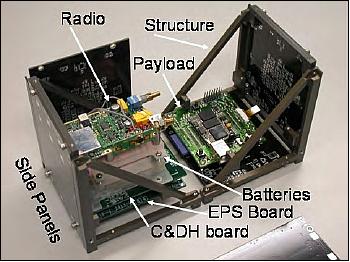
C&DH (Command & Data Handling): C&DH consists of four microcontrollers.
ADCS (Attitude Determination and Control Subsystem): The attitude determination concept for CSTB1 consisted of four sun sensor suites and five two-axis magnetic sensors integrated into the side panels of the satellite. The goal was to provide enough simple sensor measurements so that a reasonable coarse attitude solution could be derived. Given that four of the six sides of the satellite contain at least two axes of attitude information; course attitude information can be extracted for many attitudes. All sensor data can be directly downlinked to the ground for post processing.
Some control for the CSTB1 attitude is provided by magnetic torque coils (magnetorquers).
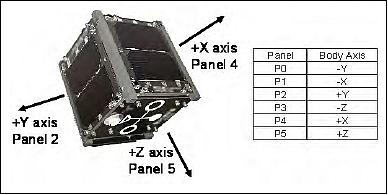
The side panels, labeled P0 through P5, are the exposed sides of CSTB1, and each panel normal corresponds to a body axis. Panel 5 (+Z axis) is the payload panel, and the visible color camera is aligned with its panel normal.
There are four sun sensor suites that provide a measurement of the sun vector in body coordinates, and are located on side panels, P1, P2, P3 and P4. Each sun sensor suite consists of four COTS photodiodes integrated on to the multifunctional side panel (Figure 4). Each of the four photodiodes is canted 45º from the normal of the side panel board and rotated 90º apart relative to each other to provide 2π steradian coverage. Their placement on the board is selected to minimize interface from the solar cells and structure of the satellite.
On CSTB1 each sun sensor suite has a different normal vector which corresponds to a body axis; the vector computations are unique for each suite.
Two-Axis Magnetic Field Sensor: Five of six side panels have a COTS magnetoresistive type two-axis magnetic field sensor. - Prior to the launch of CSTB1, the magnetic field sensors were calibrated to the Earth’s magnetic field. These sensors were calibrated individually and at the vehicle systems level.
Noise density | 50 nV/rt Hz |
Resolution | 120 µgauss |
Orthogonality | 0.01º |
Sensitivity | 1.0 mV/V/gauss |
Attitude Determination Algorithm: The attitude determination algorithm was used to help correlate vehicle attitude by using the sun and magnetic field sensor readings downloaded from CSTB1 with images taken from the on board visible camera. This algorithm statically computes each attitude quaternion estimate based on the available data at that time step. The attitude quaternion estimate computations are based on the TRIAD algorithm.
The optimized TRIAD algorithm implemented on the ground used the sun sensor suites and magnetic field sensors data to determine the satellite attitude and verify the location of an earth image taken by CSTB1’s camera. The magnetic field sensors proved to be the most useful of all the sensors because of their high availability. Attitude estimates derived for CSTB1 sensor data was used to determine the impact of the magnetic dipole created by CSTB1 antenna. This allowed ground operators to coarsely predict the pointing direction of the on board camera and schedule collections of imagery over areas of interest (Ref. 2).
RF communications: CSTB1 used two independent commercial transceivers for the communications subsystem. A custom antenna switch allowed both transceivers to use the same dipole antenna (deployable antenna). Modifications to the transceivers included removing the cases, adding thermal paste to conduct heat away from the amplifiers, and removing the screen and buttons. Two PIC microcontrollers worked as redundant TNCs (Terminal Node Controllers).
A UHF (400 MHz) downlink is implemented with a transmission power of < 1 W providing a data rate of 1.2 kbit/s using AFSK modulation (AX25 protocol). 3)
EPS (Electrical Power Subsystem): Surface mounted triple-junction solar panels. Use of two high-capacity Li-ion rechargeable batteries.
Launch
The launch of CSTB1 as a secondary payload to EgyptSat-1 (primary payload) was on April 17, 2007. The launch vehicle was Dnepr-1; the launch site was the Cosmodrome in Baikonur, Kazakhstan. Launch provider: ISC (International Space Company) Kosmotras of Moscow, Russia. 4)
Secondary payloads on this multi-spacecraft launch were: SaudiSat-3 (35 kg), SaudiComsat-3 (12 kg), SaudiComsat-4 (12 kg), SaudiComsat-5 (12 kg), SaudiComsat-6 (12 kg), SaudiComsat-7 (12 kg), AKS-1 (12 kg), AKS-2 (12 kg), and 7 CubeSats: PolySat-4 (1 kg, CalPoly), CAPE-1 [1 kg, (Cajun Advanced Picosatellite Experiment 1), University of Louisiana], PolySat-5 (1 kg), Libertad-1 (1 kg, University of Sergio Arboleda, Columbia), AeroCube-2 (1 kg, The Aerospace Corporation, El Segundo, CA), CSTB1 (1 kg, CubeSat TestBed-1, The Boeing Corporation), and MAST [3 kg, (Multi-Application Survivable Tether, Stanford University), TUI (Tethers Unlimited Inc.)]. 5) 6) 7)
The CubeSats were deployed after the primary spacecraft was deployed into a nearly circular polar orbit. Three P-PODs contained the 6 single CubeSats and 1 triple CubeSat for MAST.
Orbit: Sun-synchronous orbit, altitude = 745 km, inclination = 98º, period = 100.1 minutes. The local equator crossing time is at 10:30 hours.
Sensor Complement
Miniature Low Power Imager: The CMOS visible range color camera (640 x 480 pixel resolution) has a lens the size of a pencil's eraser head.
The attitude determination of CSTB1 was verified via an image from a low power CMOS camera and solar cell measurements.
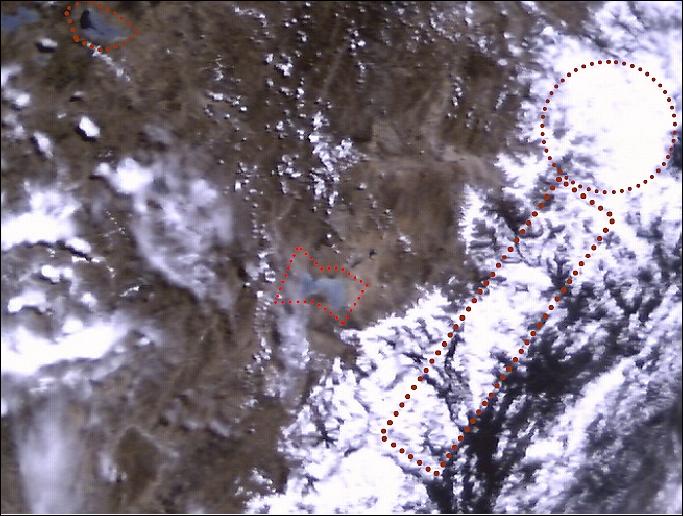
Example: The image in Figure 5 was captured by the CSTB1 camera and was used as a source to validate the attitude determination estimate. The image clearly shows several significant Earth landmarks, which include lakes, the Himalayan mountain range and Mount Everest. In order to determine which landmarks are in the image and the accuracy of the attitude determination solution, computation were made to determine where the camera was pointed at the time the image was taken (Ref. 2).
The latitude and longitude of the subsatellite point (46.9ºN, 94.5ºE) and the unit vector of the Z axis acquired from the attitude determination are used to determine the latitude and longitude of the image. The computed angle between the Z axis and nadir is 16.7º which results in a latitude and longitude for the image of 33.4º North latitude and 81.8º East longitude.
Mission Status
• The CSTB1 mission completed its primary mission goals within four months of operation and continued to operate for more than two years, downloading over a million data points and dozens of images. It was retired in Nov. 2009. 8)
• In August 2009, CSTB1 continues to operate after 27 + months on orbit. 9)
• On March 4, 2009, the CSTB1 spacecraft surpassed 10,000 Earth orbits since its launch on April 17, 2007 and successfully demonstrated numerous advanced technologies.. 10)
• In Aug. 2007, the Boeing Company had completed the first phase of its nanosatellite research and experimentation with the successful conclusion of the CSTB1 mission. The spacecraft accomplished 100% of its primary mission objectives. 11)
CSTB3
Boeing's next CubeSat demonstration mission, CSTB3, will be the first of a family of spacecraft designs representative of Boeing's new TensorTM small-spacecraft avionics architecture, which will be the core of a wide array of missions. The CSTB3 design uses the triple-cube configuration (10 cm x 10 cm x 30 cm, mass of ~4 kg).
The objectives are to demonstrate the following capabilities: (Ref. 9)
- 3-axis attitude control with a complete ADCN (Attitude Determination, Control and Navigation) subsystem
- higher communication data rates (high-gain S-band antenna)
- onboard autonomy, and advanced dynamic power management.
References
1) Elaine Caday-Eames, “Small box, big potential,” Boeing Frontiers, Oct. 2006, p. 20, URL: http://www.usergioarboleda.edu.co/proyecto_espacial/boeing_cubesat.pdf
2) Michael Taraba, Christian Rayburn, Albert Tsuda, Charles (Scott) MacGillivray, “Boeing’s CubeSat TestBed 1 Attitude Determination Design and On-Orbit Experience,” Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-X-6
3) Bryan Klofas, Jason Anderson, Kyle Leveque, “A Survey of CubeSat Communication Systems,” April 18, 2008, URL: http://www.klofas.com/papers/CommSurvey-Bryan_Klofas.pdf
4) “Boeing Pico-Satellite Mission to Advance Miniature Satellite Technology,” Boeing, April 19, 2007, URL: http://www.boeing.com/news/releases/2007/q2/070419c_nr.html
5) http://www.russianspaceweb.com/dnepr_008_egyptsat1.html
6) “Dnepr-1 Orbits 16 Satellites, Including Cube Satellites Made by U.S. Students,” SatNews Daily, April 18, 2007, URL: [web source no longer available]
7) Lori Brooks, “CubeSat Developers' Workshop 2007,” Summer 2007, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2007/Summer/Day%201/1230%20-%20Brooks%20-%20Intro%20to%20CubeSat.pdf
8) Information provided by Vicki Hogue, The Boeing Company, Phantom Works AN&SS Communications
9) Charles S. MacGillivray, “CubeSats-Some Thoughts From an Industry Perspective,” 2009 CubeSat Summer Workshop, Aug. 8-9, 2009, Logan, UT, USA, URL: https://web.archive.org/web/20160914094647/http://mstl.atl.calpoly.edu/~jfoley/Summer2009/Sun_1510_Boeing_CubeSatsIndustryPerspective_2009Aug10.pdf
10) “Boeing CubeSat Completes 10,000th Orbit,” March 9, 2009, URL: http://www.outlookseries.com/N/Science/3034_Boeing_CubeSat_Completes_10,000th_Orbit.htm
11) “Boeing Successfully Completes CubeSat Mission to Advance Nano-Satellite Technology,” Aug. 16, 2007, URL: http://www.mil-embedded.com/news/db/?7677
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)