DART: Rendevous
Non-EO
NASA
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
| Launch date | 15 Apr 2005 |
| End of life date | 15 Apr 2005 |
DART (Demonstration for Autonomous Rendezvous Technology)
DART is a NASA flight vehicle demonstrator mission of with the objective to test enabling technologies required to locate and rendezvous with other target spacecraft (client) - in particular, to perform and validate close proximity operations and its control between the DART vehicle and a passive target satellite in orbit. The DART mission is unique in that all of the operations will be autonomous - there will be no astronaut onboard at the controls, only computers programmed to perform functions. NASA considers this mission as a key step in establishing autonomous rendezvous capabilities for the US space program (groundwork for future reusable manned and unmanned launch vehicle missions). 1) 2) 3)
The ability to autonomously dock and deliver a payload to the ISS is a critical requirement for the 2nd generation RLV (Reusable Launch Vehicle) program and key to the SLI (Space Launch Initiative) program. RLV and SLI are part of NASA's Alternate Access to Station (AAS) concept, originally initiated in the fall of 2000. The DART mission is funded by the RLV and SLI projects of NASA. Note: NASA cancelled the AAS program in 2003 due to budgetary problems.
Specific DART mission proximity maneuver requirements call for:
• Demonstrate minus V-bar approach and stand-off to 15 m (the stand-off is also referred to as "station keeping")
• Demonstrate docking axis approach and stand-off to 5 m
• Demonstration of a collision avoidance maneuver
• Demonstrate approach from below (plus R-bar) and stand-off to 50 m
• Demonstrate circumnavigation of target satellite (transfers from plus R-bar to minus V-bar)
• Demonstrate a forced motion retreat to quantify the range of AVGS (Advanced Video Guidance Sensor)
• Demonstrate autonomous departure from the target at end of mission
In addition, there are other requirements calling for safe operations and other needed validations.
Spacecraft
The DART spacecraft has been designed and built by OSC (Orbital Sciences Corporation) of Dulles, VA (contract award in June 2001). The spacecraft structure consists of the OSC's MicroStar platform design (aluminum honeycomb structure with composite facesheets). The S/C is gravity-gradient stabilized and nadir pointing with two solar panels each of 96 cm in diameter. The S/C shape and bus structure in orbit resembles a butterfly, a cylinder of 1.04 m diameter, whose covers (with surface mounted solar cells) open up like the wings of a bird; the gravity gradient boom points toward the Earth's center. The DART spacecraft mass is about 365 kg. 4)
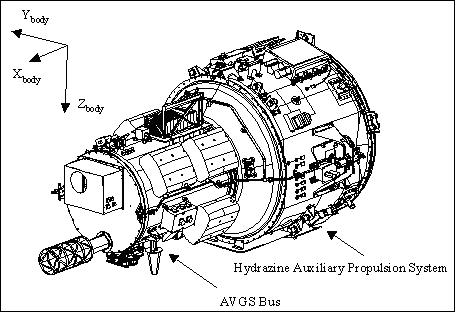

The fourth stage of the Pegasus rocket is also part of the DART satellite, sharing avionic and propulsion components while in orbit. The auxiliary propulsion system includes three hydrazine-fueled thrusters delivering 670 N of thrust. The Pegasus reaction control system includes also six nitrogen-fueled thrusters producing 670 N of thrust. DART also uses 16 proximity operations reaction control engines propelled by nitrogen that offer 58 N of thrust (provision of 6-axis attitude and translational control during proximity operations).
RF communications: A dual S-band PCM telemetry subsystem is being employed. In addition, there is a video imaging system (separate from AVGS). The three ground stations selected for telemetry coverage are: Poker Flats, Alaska; McMurdo, Antarctica; and Svalbard on the island of Spitzbergen (Norway).
Launch
A launch of DART took place on April 15, 2005 on a Pegasus vehicle of OSC (air launch from its Stargazer L-1011 aircraft over the Pacific Coast near VAFB, CA).
Initial orbit of DART: Near circular polar orbit of about 860 km in altitude.
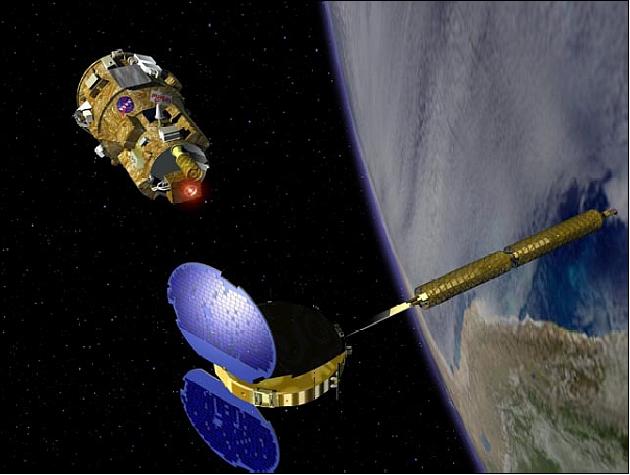
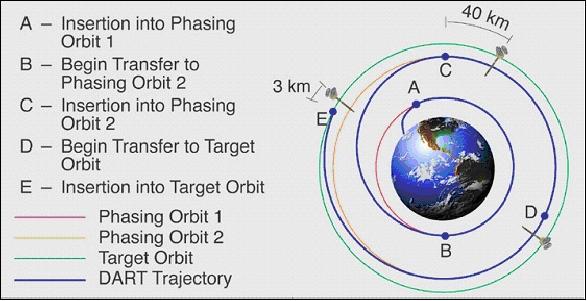
Rendezvous Maneuvers Between DART and a Passive Target Spacecraft
Once on orbit, DART will travel around the Earth to rendezvous with the target satellite, namely MUBLCOM (Multiple Paths, Beyond-Line-of-Site Communications) spacecraft, also built by Orbital Sciences. Launched on May 18, 1999 (and placed into an SSO at 775 km altitude), the MUBLCOM microsatellite of 48 kg was used by DARPA (Defence Advanced Research Projects Agency) as an experimental communications satellite and was outfitted with optical retro reflectors designed for future use with a video guidance system such as the AVGS (Advanced Video Guidance Sensor) onboard DART.
Over a period of 24 hours, DART will perform several autonomous, close proximity operations with MUBLCOM, including station keeping, docking approaches, and collision avoidance maneuvers. The DART software will test algorithms by calculating and executing collision avoidance maneuvers and circumnavigation - i.e., navigating around the MUBLCOM satellite. To conclude the mission, DART will fly away from the MUBLCOM satellite.
Background: In 2001, Orbital Sciences proposed a low cost Class D flight experiment to fly up to MUBLCOM in its polar orbit in a Demonstration of Autonomous Rendezvous Technology (DART) using GPS receivers on both vehicles and left-over VGS sensors from the Shuttle. Instead, the DART project decided to develop the Advanced Video Guidance Sensor (AVGS) as a follow on sensor to improve on the VGS (Video Guidance Sensor). The VGS and AVGS are sensors designed to acquire and track one or more patterns of retro-reflectors on another spacecraft at ranges from 1 m out to 300 m and calculate the relative position of the target. 5)
DART Sensor Complement
AVGS (Advanced Video Guidance Sensor)
AVGS (Advanced Video Guidance Sensor) is an advanced version of the VGS (Video Guidance Sensor) originally developed by NASA/MSFC, Huntsville, ALA. AVGS is provided by OSC, the prototype system was developed by AOS (Advanced Optical Systems) Inc. of Huntsville, ALA. AVGS is a laser-based optical system (that works with cooperative retroreflectors on the target satellite) incorporating advanced optics and electronics. In addition, it receives a continuous GPS (Global Positioning System) information stream broadcasted from the MUBLCOM satellite to track the satellite within a range of about 100 m.
AVGS is a dual-wavelength system, it employs 808 nm and 850 nm laser diodes for the generation of dual image sequences in the visible range. AVGS fires first the 808 nm laser at the target and captures an image, including reflections from the target spots and from any other part of the spacecraft from which light bounces. Next, it fires the 850 nm laser and captures another image, then subtracts the first image from the second. Because stray reflections are canceled out this way, the only image left should be the bright spots from the target reflectors. The following sequence steps are taken: 6) 7)
• Image 1 is taken at 808 nm
• Image 2 is taken at 850 nm
• A threshold is taken of the differential image
• A centroid is found for each spot in the image
• Tracking windows are established
• Position (azimuth/elevation and rage); attitude (roll, pitch, yaw)
• Position and attitude information is sent to the navigation algorithm.
The AVGS output provides azimuth, elevation, range, and relative attitude for capture operations support.
The software algorithms are referred to as ARPO (Autonomous Rendezvous and Proximity Operations), developed at NASA/MSFC. Both the AVGS and the ARPO package are part of an Embedded Technology onboard a Pegasus ELV, making the DART vehicle an extension of the ELV, rather than an independent and isolated payload.
UHF antenna & receiver system, providing space to space communications -target knowledge
SIGI (Space Integrated GPS/INS) package of NASA, and the SGR-10 GPS navigation receiver of SSTL (Surrey Satellite Technology Ltd) - providing DART attitude and position knowledge.
DART Rendezvous Maneuvers Ended Prematurely
After launch, DART successfully orbited and within hours made a rendezvous with the target satellite MUBLCOM (Multiple-Path Beyond-Line-of-Sight Communications). The automated systems aboard DART successfully acquired MUBLCOM and began autonomously approaching it. During proximity operations, multiple malfunctions in navigation, propellant management and collision avoidance programming led to a soft collision with the target spacecraft and premature departure and retirement of the DART spacecraft. Neither DART nor MUBLCOM appeared to have been damaged in the incident.
DART had no capability for interactive piloting from the ground or for uploading new programming after launch, thus all on-orbit operations were directed by DART itself based upon preprogrammed criteria. The initial mission was to occur over about 24 hours but its premature failure occurred after only about 11 hours. 8) 9)
The DART spacecraft ran out of fuel as it approached its target satellite (MUBLCOM) for autopilot tests (the mission ended to within 100 m of its target). It is not clear why DART used substantially more thruster propellant than envisioned, but officials saw the craft was fighting some guidance errors earlier in the mission. 10)
The DART spacecraft suffered a problem after reaching its target on launch day, failing to complete the planned demonstrations. The satellite went into its "retirement" mode, prior to completing all planned proximity operations, ending the mission prematurely. - NASA began a mishap investigation board to determine the reason for the DART spacecraft anomaly (the mishap investigation board was selected on April 22, 2005).
NASA released a summary report on May 16, 2006 identifying the causes of a collision on April 15, 2005. A five-month investigation following the mishap found that DART had used up its pressurized nitrogen gas maneuvering fuel before it could complete the rendezvous. The investigation board determined that excessive thruster firings in response to incorrect navigational data caused the spacecraft to run out of thruster fuel during its approach, so it could not avoid the low-velocity collision with MUBLCOM. 11)
The MIB (Mishap Invetigation Board) said that the spacecraft's GPS receiver suffered from a "factory error," which caused DART to reset its position and speed continually, and thereby discard the real-time GPS data that could have kept it on a precise course for the rendezvous and avoided the collision.
Because of the error, DART's receiver consistently produced a velocity reading that was biased by about 0.6 m/s from what it should have been. The spacecraft's onboard software could not reconcile the error with the real-time data, and hence kept firing the thrusters and using up its fuel.
Combined with other errors and complications, the miscalibration caused DART to collide with MUBLCOM, the NASA board found - although the collision was minor. DART missed its 6.3 meter target envelope by less than 2 meters.
References
1) http://www.orbital.com/NewsInfo/Publications/DART.pdf
2) http://misconceive/news/dart/
3) http://misconceive/NEWSROOM/background/facts/dataport
4) http://www.nasa.gov/mission_pages/dart/spacecraft/index.html
5) R.T. Howard, T. C. Bryan, "DART AVGS Performance," Proceedings of SPIE, 'Sensors and Systems for Space Applications,' Richard T. Howard, Robert D. Richards, Editors, 65550L, Vol. 6555, May. 3, 2007, URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070031729_2007031265.pdf
6) N. Savage, "Image-Guided Tracking," Laser Focus World, http://lfw.pennnet.com/Articles/Article_Display.cfm?Section=Archives&Subsection=Display&ARTICLE_ID=26656&KEYWORD=Savage
7) http://www.aos-inc.com/research/research.htm
8) "Overview of the DART Mishap Investigation Results For Public Release," URL: http://www.nasa.gov/pdf/148072main_DART_mishap_overview.pdf
9) B. Berger, "DART Collides with Rendezvous Spacecraft," Space News, April 25, 2005, p. 4
10) J. Ray, "NASA's Robot DART Mission Ends in Mishap," http://www.space.com/missionlaunches/sfn_dart_launch_050415.html
11) P. Berardelli, "Lots Of Little Errors Caused DART Spacecraft Mishap," Spacedaily, May 17, 2006, URL: http://www.spacedaily.com/reports/Lots_Of_Little_Errors_Caused_DART_Spacecraft_Mishap.html
This description was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors". Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).