ESMO (European Student Moon Orbiter)
Non-EO
ESA
Cancelled
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA |
| Mission status | Cancelled |
ESMO (European Student Moon Orbiter)
ESMO is an educational minisatellite mission within the SSETI (Student Space Exploration and Technology Initiative) program managed by the ESA Education and Outreach Office. ESMO is a technically and operationally demanding mission for university students to be realized within the tight mass and volume constraints of a piggyback launch opportunity. This makes it a challenging opportunity for hands-on education, but it also requires a level of project management and professional technical support which is higher than a conventional educational project. Universities from more than 15 countries are participating in the project. In March 2006, ESMO was approved by the ESA Education Department for a Phase A Feasibility Study. 1) 2) 3) 4) 5) 6) 7) 8) 9)
The four main mission objectives, set by ESA, are:
• To launch the first lunar spacecraft to be designed, built and operated by students across ESA Member States and ESA Cooperating States
• To place the spacecraft in a lunar orbit. - An onboard chemical propulsion system will be used to transfer the spacecraft from its initial Earth orbit to a polar orbit around the Moon via the Sun-Earth L1 Lagrange point over a period of 3 months; this is done to reduce propellant consumption.
• To acquire images of the Moon from a stable lunar orbit and transmit them back to Earth for education outreach purposes.
• To transfer to a science orbit, and deploy a small subsatellite for conducting global, precision lunar gravity field mapping.
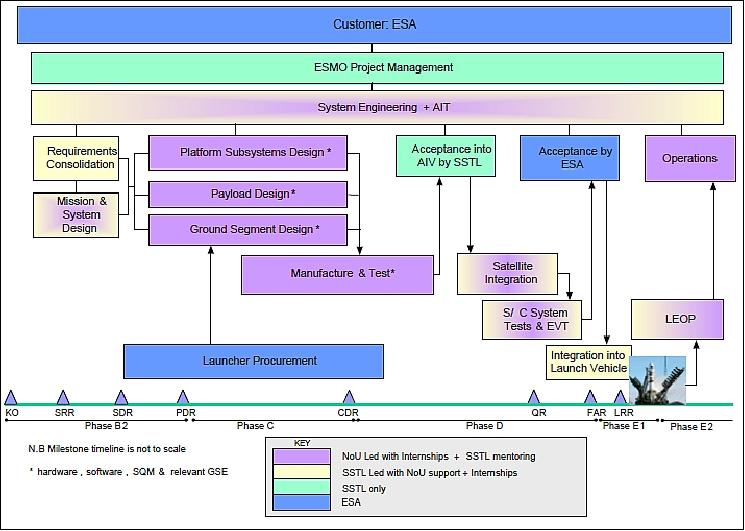
Following a competitive tendering process Surrey Satellite Technology Ltd (SSTL) has been selected as the industrial prime contractor for this mission. SSTL also acts as an industrial mentor to the Network of Universities (NoU) involved in the program.
In October 2009, ESA's Education Office awarded a contract to SSTL (Surrey, UK) to manage the development and testing of the first European student mission to the Moon. SSTL is the system prime contractor with 19 European Universities (from 11 countries) acting as subcontractors designing and building all of the required subsystems. 10) 11) 12)
The main challenges for SSTL during the program are split into ensuring that the mission is a success through managing the system design and subsystem interfaces but also in providing mentoring to the university teams that are producing all of the hardware that must be suitable for the environment that the spacecraft will be exposed to during the planned 11 month mission lifetime with an expected launch date in 2014.
Unlike a typical space project, each spacecraft subsystem, payload and ground segment element is being designed, built and operated by groups of university students based in ESA Member States or Cooperating States. As with the previous satellites sponsored by the ESA Education Office, the objective of ESMO is to prepare the next generation of European engineers and scientists by providing valuable hands-on experience with a real and demanding space project.
Mission Phases (Preliminary Analysis)
The ESMO mission lifetime is expected to be approximately 11 months in length from launch into GTO and until the end of the lunar operations after which the orbit naturally decays until surface impact, this period is split up into three phases, LEOP & commissioning, transfer and operational orbit (Ref. 10).
1) LEOP and commissioning: To reduce costs, the spacecraft is being designed for launch into GTO as an auxiliary/secondary payload on one of the following launch vehicles Ariane-5, Soyuz, Tsyklon-4 or Falcon-9. To determine the upper wet mass limit for ESMO, the known performance of the Ariane-5 and Soyuz have been used. Currently the Ariane-5 has the lowest auxiliary limit of 300 kg for launch to GTO.
The current baseline wet mass limit for ESMO is 265 kg and driven by the qualification limits of the flight spare propulsion tanks from the GIOVE-A2 program combined with the required ΔV.
This phase of the mission is expected to last for approximately 1 month and includes time to complete spacecraft commissioning. The main challenge during this phase is the TID (Total Ionizing Dose) environment that will preclude the spacecraft remaining in the orbit for longer than 1 month, in order to minimize the mass ESMO will have very limited radiation shielding and it is unlikely that radiation hardened components will be used due to the cost implications.
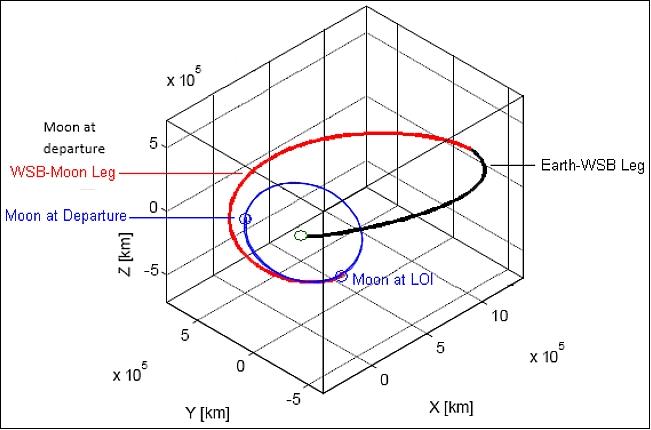
2) Transfer orbit: The transfer from GTO to LOI (Lunar Orbit Insertion) will be achieved by the use of a WSB (Weak Stability Boundary) transfer in order to minimize the propellant required, the total transfer time will take 3 to 4 months and will involve apogee raising out to 1.5 x 106 km.
This phase includes all of the critical firing maneuvers which represent the highest risk to the success of the mission. Any mistakes or failures occurring during this phase will undoubtedly stop ESMO from reaching the moon.
3) Lunar orbit: The ESMO lunar orbit requirement is to reach a stable lunar orbit that is defined as an orbit where the spacecraft doesn’t impact the surface for at lest 6 months. ESMO will be placed into a highly elliptical lunar orbit with a high eccentricity due to the ΔV limitations with the parameters for the baseline lunar orbit as defined in Table 1.
This phase of the mission is expected to last a minimum of 6 months and the transfer will be designed to reach a lunar orbit which avoids the long periods of Earth occultation of the sun as the spacecraft has not been designed to survive during these events.
Apoapsis altitude, ha | 21813.2 km |
Periapsis altitude, hp | 879 km |
Eccentricity | 0.8 |
Inclination | 56.2º |
Argument of periapsis, ω | 270º |
True anomaly, θ | Arbitrary |
RAAN (Right Ascension of the Ascending Node), Ω | free |
Spacecraft
The current spacecraft design has been produced through several workshops attended by all of the participating universities where the design has been iterated to reach the baseline solution that is presented in Table 1. The baseline spacecraft system architecture is presented in Figure 1. The spacecraft design has evolved from work completed by the university teams during earlier phases of the project prior to SSTL involvement. The design has been refined to incorporate the latest payload designs, the updated mission analysis and the newly acquired flight spare hardware donated by ESA. 13)
• AOCS (Attitude and Orbit Control Subsystem): The spacecraft is 3-axis stabilized. The subsystem is made up of the following units, four reaction wheels, a dual redundant AIM (AOCS Interface Module), dual redundant gyros, dual redundant ST (Star Trackers) and four sun sensors. The AIM acts as the main interface between each of the AOCS units and the AOCS task(s) that will be running on the main OBC (On-board Computer).
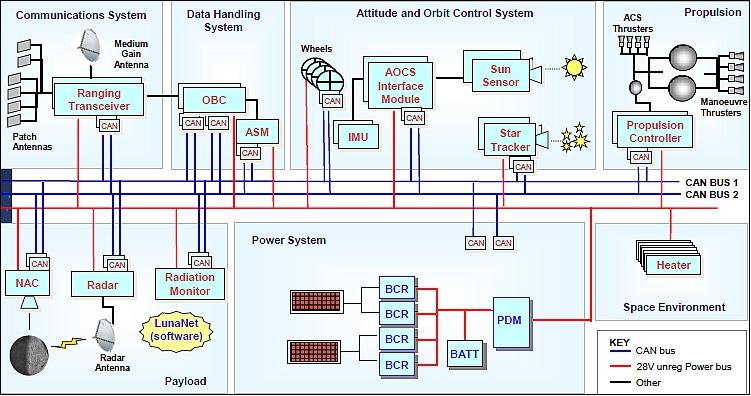
• Propulsion subsystem: The subsystem is split into two parts, the main part is a bipropellant system used for high delta-V maneuvering and the second part is a mono-propellant thruster system for emergency attitude control. The system is pressurized using helium gas.
The maneuvering propulsion system for the ESMO mission is a bipropellant system using hydrazine as the fuel and NTO (Nitrogen Tetroxide) as the oxidizer with a mixture ratio of 1:1. The propellant tanks from the GIOVE-A2 mission will be refurbished and provided for use on the ESMO mission. The tanks have a maximum qualification limit of 54.4 kg which along with several other factors limits the amount of hydrazine available for maneuvers. The propellant budget assumes a reduction in the available hydrazine as follows, 5% Ullage, 1% residual propellant in the tank and 6.38 kg of hydrazine that will be used by the mono-propellant system for attitude control for LEOP and during safe-mode.
The hydrazine available for the maneuvers is therefore limited to 44.9 kg and with the main engine consisting of two 22 N thrusters with a specific impulse of 308s, this gives a ΔV capability of 1300 m/s.
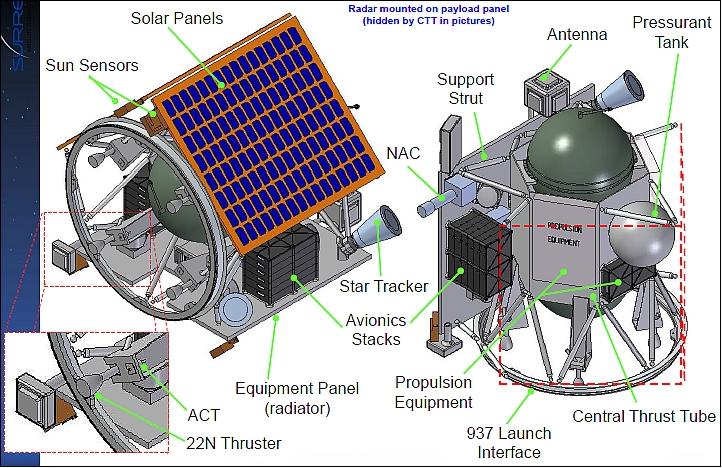
• Spacecraft structure: The mechanical design of the spacecraft is based around a lightweight open structure; this approach has been selected due to the very tight mass restrictions placed on the mission by the limitations of the propellant tanks. The preliminary ESMO spacecraft design is shown in Figures 2 and 3.
The open structure is made up of an Aluminum honeycomb CTT (Central Thrust Tube) mounted on a 937 launch interface, the equipment radiator panels and both solar panels are connected through load bearing struts to the CTT. The solar panels are mounted at right angles to each other in order to maximize the power generation, this will require the spacecraft to be three axis stabilized and to sun point during the majority of the mission.
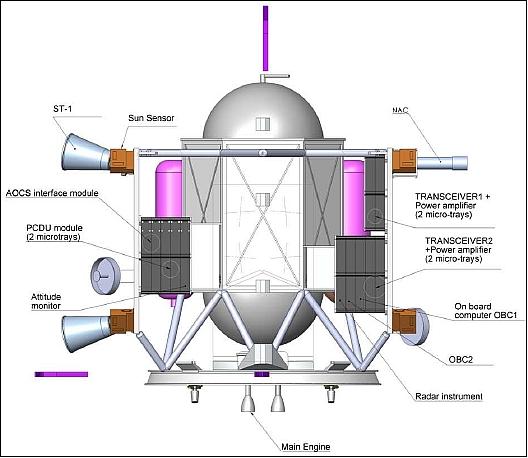
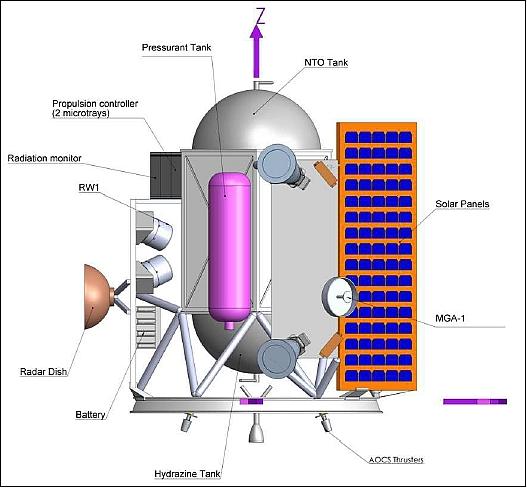
The majority of the avionics and payloads are mounted directly onto three equipment radiator panels. Most of the avionics will be built up into stacks that will be based on a generic SSTL module box design. This approach should simplify the mechanical interfaces and has the potential to reduce the total avionics mass through the use of common walls between modules.
The propulsion equipment including the main maneuvering thrusters and AOCS (Attitude and Orbit Control Subsystem) thrusters are mounted on a panel that sits inside the launch adapter ring giving better alignment between the thrust vector and the CoG (Center of Gravity).
• Thermal subsystem: The thermal design of the spacecraft is based around a largely passive solution using MLI (Multi-Layered Insulation) and surface coatings to keep units within their thermal limits. There is however the need for local heaters in order to maintain the propellant tank temperature during eclipse periods for example but these heaters will be the exception to the passive solution.
• OBDH (On-Board Data Handling) subsystem: The main data bus used on ESMO is based on a dual redundant CAN bus similar to that used on all the most recent SSTL spacecraft, the CAN bus provides a robust interface for all of the subsystems that is used to allow communication with the OBC but also a test interface during ground testing.
The OBDH architecture is based around a single operational OBC that controls the spacecraft with the ASM (Attitude Safety Module) being used in a system monitor role during all mission phases. The ASM is based on a simple but robust architecture that can be relied upon to place the spacecraft into safe mode in event of an anomaly that cannot be resolved by the operational OBC, this is a key feature of the ESMO FDIR (Failure, Detection, Isolation and Recovery) philosophy.
The operation of the OBC/ASM during all mission phases is based on a fail safe concept except during critical maneuvers. In order to increase the probability of completing a critical maneuver successfully the FDIR concept is adapted to be ‘best effort’ fail operational during the short period before and during a critical maneuver. This approach has been selected in order to best fit inside the schedule and budget of the mission were a fully fail operational concept is deemed to be far too costly and outside of the current project schedule.
• EPS (Electrical Power Subsystem): The power subsystem architecture that has been selected for the ESMO mission is based on a MPPT (Maximum Power Point Tracker) concept with an unregulated battery bus that is distributed to all modules. The MPPT function is implemented inside the BCRs (Battery Charge Regulators) that are also used to ensure safe charging of the battery pack. The primary power source for the mission will be a two body mounted solar panels populated with triple junction GaAs solar cells. The secondary power source is a flight proven Li-ion battery pack.
• RF communications: The communication subsystem uses an S-band ranging transponder that will provide all TM/TC functionality during all mission phases. The link budget shows good margin both in GTO and in lunar orbit with only the downlink at the WSB (Weak Stability Boundary) having very limited margin due to nulls in the omni-directional antenna pattern. The best case downlink budget for each mission phase is shown in Table 2.
The downlink budget assumes 10 W of RF power with a best case antenna gain of 8.5 dB, in order to maintain is positive margin the data rates can be varied with a minimum 2 kbit/s during all phases. The lower data rate limit is set by the phase noise of the transponder and is already proving to be a major challenge in order to maintain a positive link margin at the WSB. The preferred solution is to reduce the nulls in the omni-directional pattern of the antenna to aid recovery in the event of an anomaly but this is still being investigated.
The payload data will be downlinked at 6 kbit/s using an ESA flight spare MGA (Medium Gain Antenna) and assumes the use of the 24 m antenna in Munich while in lunar orbit.
Parameter | GTO | WSB | Lunar orbit |
Range | 3.6 x 104 m | 1.5 x 109 m | 2.84 x108 m |
Free space loss | 190.7 dB | 223.2 dB | 211.3 dB |
C/N0 | 81.7 dB | 49.3 dB | 61.2 dB |
Received Eb/N0 | 48.7 dB | 16.3 dB | 23.4 dB |
Margin | 38.8 dB | 6.3 dB | 17.4 dB |
Launch
A launch of the ESMO spacecraft as a secondary payload is planned for 2014/15.
Orbit
ESMO will exploit the relative benefits of a WSB (Weak Stability Boundary) transfer to reach a polar orbit around the moon. In a typical WSB transfer the spacecraft departs from GTO (Geostationary Transfer Orbit) by performing a TLI (Trans-lunar Insertion Maneuver). The spacecraft then coasts for more than 106 km, until it reaches the WSB region. By performing small correction maneuvers the spacecraft can then coast toward the moon. A final LOI (Lunar Orbit Insertion) maneuver ensures injection around the moon. This methodology is adopted for the ESMO mission. 14) 15)
Project Status
The ESMO Project was Discontinued in April 2012 due to Expected Cost Overruns 16)
In April 2012, the ESMO project passed its PDR (Preliminary Design Review) at ESA/ESTEC, Noordwijk, the Netherlands. However, although the review board was confident that the mission’s objectives could be met, ESA’s Education Office has announced that the project will not continue to the next phase.
Following a full evaluation of the costs of completing the program, Agency education officials decided that ESMO was not sustainable within current budget constraints.
ESMO was started as an inspirational educational project that would attract science and engineering students with a long-term objective of ensuring a bright future for Europe’s space industry. The project also offered a unique opportunity for students to contribute to the scientific knowledge and future exploration of the Moon by returning new data and testing new technologies. These objectives were spectacularly successful, with more than 300 students from over 20 different universities from across Europe contributing to the project to date.
The students performed their work on ESMO as part of their academic studies, under the supervision of their university staff, with Surrey Satellite Technology Ltd (SSTL), the ESMO industrial prime contractor, in charge of project management and technical development.
The educational objectives of the project have been achieved by providing students with technical guidance and mentoring from senior SSTL and ESA experts, through project workshops, intensive internships and concurrent engineering sessions.
After the PDR, the Education Office conducted a thorough evaluation of the total cost-to-completion of the project, based on the approved preliminary design. “Unfortunately, the total cost has increased during the evolution of the project to a level which substantially exceeds the current and projected budget constraints of the Education Office,” said Hugo Marée, Head of ESA’s Education and Knowledge Management Office.
Sensor Complement
As part of the SDR review the final payload selections will be made, there is a short list of five payloads of which the NAC (Narrow Angle Camera) has been pre-selected as a compulsory payload. The list of potential payloads is presented in Table 4.
Payload name | Description | Project status |
NAC | Narrow angle camera for imaging of the lunar surface | Mandatory |
Radiation Monitor | Radiation monitor to measure the environment during all mission phases | Inclusion under assessment |
LunaNet | A test of communication protocols required to support a lunar internet | Inclusion under assessment |
Radar | 1D radar experiment | Inclusion under assessment |
MiWarS | A passive microwave radiometer providing details of the lunar subsurface | Inclusion under assessment (backup payload) |
Each of the four optional payloads are currently being assessed in order to determine the suitability of each for inclusion in the mission. Each payload is being assessed based on the following parameters listed in order of importance, mass, power and data requirements.
The spacecraft budgets (mass, Power and data) currently assume the inclusion of the radiation monitor, LunaNet (currently assumes no extra requirements on the hardware) and the Radar experiment with the MiWarS being retained as a backup should one of the other payloads be unable to meet the mission schedule.
University | Country | Subsystem |
University of Liège | Belgium | Narrow angle camera payload |
Czech Technical University, Prague | Czech Republic | Attitude interface module |
University of Tartu | Estonia | Assembly, integration and verification and satellite operation |
Institut Supérieur de l'Aéronautique et de l'Espace (ISAE) | France | Star Tracker |
University of Stuttgart | Germany | Propulsion system - gas feed (cold gas thruster) |
Technical University of Munich | Germany | LunaNet payload & ground station |
University of L'Aquila and | Italy | Microwave radiometer scientific payload |
Politecnico di Milano | Italy | Attitude determination and control system |
Politecnico di Milano | Italy | Propulsion system - liquid feed (bipropellant thruster) |
Warsaw University of Technology | Poland | Thermal control subsystem |
Warsaw University of Technology | Poland | Communications subsystem |
AGH University of Science and Technology | Poland | Space environment & effects analysis |
Politehnica University of Bucharest | Romania | Attitude determination and control system |
Politehnica University of Bucharest | Romania | Structure |
University of Bucharest | Romania | Radiation monitor payload |
University of Ljubljana | Slovenia | Simulator |
University of Ljubljana | Slovenia | 1D radar payload |
University of Maribor | Slovenia | On-board data handling |
University of Oviedo | Spain | Harness |
University of Vigo | Spain | Ground Station |
University of Strathclyde | UK | Mission analysis and flight dynamics |
University of Southampton | UK | System engineering |
University of Warwick | UK | Power subsystem |
Ground Segment
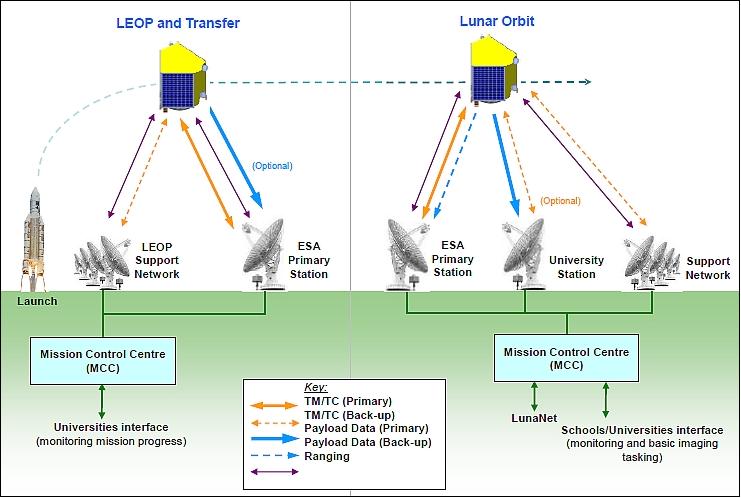
The ground segment of the mission will largely be provided by the student teams, the preliminary ground segment is shown in Figure 6.
The primary TT&C station will use either the ESA 15 m dish at Villafranca, or through the utilization of the ESA ESTRACK network. Use of Villafranca alone will provide approximately 47% coverage during the transfer phase; coverage during other phases is still to be determined and may require the use of further stations.
Once in lunar orbit, a 24 m dish at Munich (Raisting) will be used to collect payload data. The ground station is currently being refurbished by the student team. Further ground stations maybe required in order to cover all the critical phases of the mission and the work to determine how many stations are required along with the compatible locations is ongoing.
The other parts of the ground segment such as the MCC (Mission Control Center) are still under investigation and due to the very immature status of design no further details will be presented at this time.
References
1) R. Walker, “The European Student Moon Orbiter (ESMO): A Lunar Mission for Education, Outreach and Science,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.A3.2.A13
2) R. Walker, “The European Student Moon Orbiter (ESMO) Project: Attracting and Training a New Generation of Lunar Explorers,” Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-A3.6.A.07
3) B. P. Larouche, R. E. Zee, H. Spencer, J. Arkani-Hamed, “The Lunette Space Mission: Using a nanosatellite for high resolution mapping of the far-side lunar gravity field,” Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.2.03
4) S. Ulrich, J.-F. Veilleux, F. L. Corbin, “Power System Design of ESMO,” Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.6.13
5) http://www.esa.int/esaMI/Education/SEML0MPR4CF_0.html
6) Evianne Brandon, Vincent Bertrand-Noel, Bastian Olberts, Daniel Novak, “ESMO Phase B1 Mission Analysis: Targeting Options for Lunar WSB Transfers along with a Multi-Burn Injection Strategy,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.E2.3.5
7) R. Walker, P. Galeone, H. Page, A. Castro, F. Emma, N. Callens, J. Ventura-Traveset, “ESA Hands-on Space Education Project Activities for University Students: Attracting and Training the Next Generation of Space Engineers,” The Future of Global Learning Engineering Education, April 14-16, 2010, Madrid, Spain, URL: http://www.ieec.uned.es/Investigacion/Educon2010/SearchTool/EDUCON2010/...
8) “ESMO: An Inspirational Hands-On Space Education Project to the Moon,” AMSAT-UK Colloquium, Guildford, Surrey, UK, July 30-31, 2011, URL: http://www.uk.amsat.org/wp-content/uploads/colloquium%202011/ESMO2011.pdf
9) http://www.esa.int/esaMI/Education/SEML0MPR4CF_0.html
10) Mark Taylor, Kevin Hall, Andy Phipps, Roger Walker, Ben Schwarz, “European Student Moon Orbiter (ESMO) - The First European Student Mission to the Moon,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
11) “Development of the ESMO student Moon satellite gets under way,” Nov. 6, 2009, URL: http://www.esa.int/esaCP/SEM8Z8YRA0G_index_0.html
12) Alison Gibbings, Daniel Novak, Cesar Martinez, Francesco Rizzi, Federico Zuiani, Massimiliano Vasile, “Navigation Analysis and Manoeuvres Design for the European Student Moon Orbiter,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
13) Susan Jason, Kevin Hall, Benjamin S. Schwarz, Roger Walker, Christiane Mueller, Alex Kinnaird, Doug Liddle, Martin Sweeting, Alex da Silva Curiel, “Hitchhiking to the Moon: The European Student Moon Orbiter Mission,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.B4.8.4
14) Alison Gibbings, Federico Zuiani, Daniel Novak, Massimiliano Vasile, “Optimal Design of Low-Energy Transfers to Highly Eccentric Frozen Orbits around the Moon,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.8.3
15) “ESMO: Mission Analysis and Flight Dynamics,” University of Strathclyde, URL: http://www.strath.ac.uk/space/research/optimisation/esmomissionanalysisandflightdynamics/
16) “ESA concludes student ESMO Moon orbiter project,” ESA, April 17, 2012, URL: http://www.esa.int/SPECIALS/Education/SEMFX0KWZ0H_0.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).