ETS-VII (Engineering Test Satellite VII)
Non-EO
JAXA
Mission complete
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Agency | JAXA |
| Mission status | Mission complete |
| Launch date | 27 Nov 1997 |
| End of life date | 30 Oct 2002 |
| CEOS EO Handbook | See ETS-VII (Engineering Test Satellite VII) summary |
Overview
Engineering Test Satellite (ETS-VII , Japanese nickname: Kiku-7) is a JAXA (formerly NASDA) technology demonstration satellite. The overall mission objectives are to conduct space robotic experiments and to demonstrate its utility for unmanned orbital operation and servicing tasks (rendezvous-docking techniques). In the rendezvous-docking experiment, the chaser satellite conducts rendezvous-docking with the target satellite by both automatic and remotely piloted controls, and in the space robotic experiments, unmanned space work is carried out by teleoperation. The autonomous target capture by an unmanned space robot is a big challenge for the space robotics community. In addition, the space robotic experiments by MITI/ETL (Electrotechnical Laboratory of MITI), CRL (Communication Research Laboratory) and NAL (National Aerospace Laboratory) are carried out. 1)
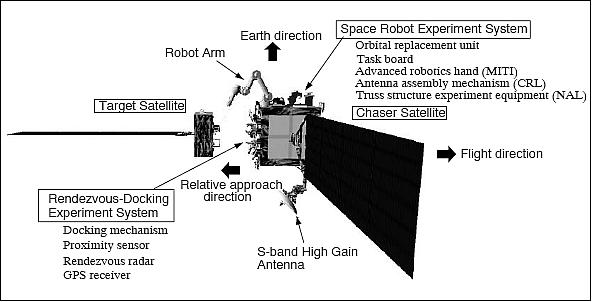
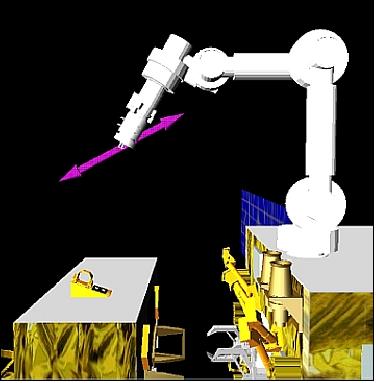
Figure 1: Configuration of the ETS-VII autonomous docking maneuver (image credit: Tohoku University)
Background on ETS missions
NASDA's ETS satellite series is aimed at developing and demonstrating common base technologies. The program started with the launch of ETS-I (Kiku-1), NASDA's first satellite, on Sept. 9, 1975, from Tanegashima Space Center using an N-I launch vehicle.
S/C | Launch/ Service life | Objective/Comment |
ETS-I | Sept. 9, 1975/ | Circular orbit of 1000 km, 47º inclination, S/C mass = 82.5 kg |
ETS-II | Feb. 23, 1977/ | Japan's first GEO S/C at position 130º E, S/C mass =130 kg, S/C diameter = 1.4 m |
ETS-III | Sept. 3, 1982/ | Data for designing earth observation satellites with high power requirements; |
ETS-IV | Feb. 11, 1981/ | GTO orbit with 225 km perigee and 36,000 km apogee, inclination=28.5º; S/C mass = 640 kg |
ETS-V | Aug. 27, 1987/ | Test of GEO three-axis bus system technology and experiments for mobile |
ETS-VI | Aug. 28, 1994/ July 9, 1996 | Confirm the technology required for a GEO three-axis satellite bus system for high performance |
ETS-VII | Nov. 28, 1997/ | Rendezvous-docking and space robotic experiments |
ETS-VIII | Dec. 18, 2006 | Demonstrate support of mobile communications with S/C in GEO |
The ETS-VII mission consists of two demonstration packages: autonomous rendezvous/docking (RVD) and robot experiments (RBT).
Spacecraft
The ETS-VII system consists of two spacecraft: a chaser satellite (Hikoboshi) with a total mass of 2,540 kg, and a target satellite (Orihime) of mass 410 kg. A manipulator arm (or robot arm) of 2 m length is installed on Hikoboshi providing a 6 DOF (Degree of Freedom) maneuvering capability. Both satellites are three-axis stabilized (built by Mitsubishi Electric). The mission design life is 1.5 years. 2) 3)
Spacecraft configuration | Chaser satellite : 2.6 m x 2.3 m x 2 m, box shape, S/C mass: 2.450 kg |
Total launch mass | 2860 kg |
Electrical power | Chaser satellite : 2360 W |
Attitude control | Chaser satellite/Target : Three-axis stabilized, zero-momentum type |
Design life | 1.5 years |
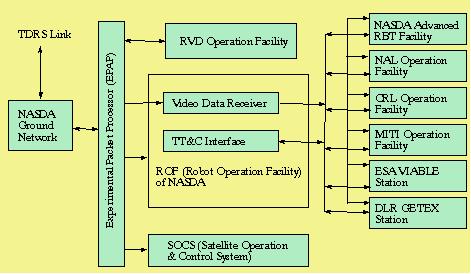
RF communications: There are two communication links for the chaser. One is SSA (S-band Single Access) link via data relay satellites. Another is USB (Unified S-Band) link. SSA HG (High Gain antenna) communication system includes the S-band high gain antenna of the chaser. USB/SSA OMNI communication systems includes S-band omni antenna of the chaser. The inter-satellite link between the chaser and the target is realized by S-band antenna of the chaser and the S-band omni antenna of the target. The concept of the communication is depicted in Figure 2. 4) 5)
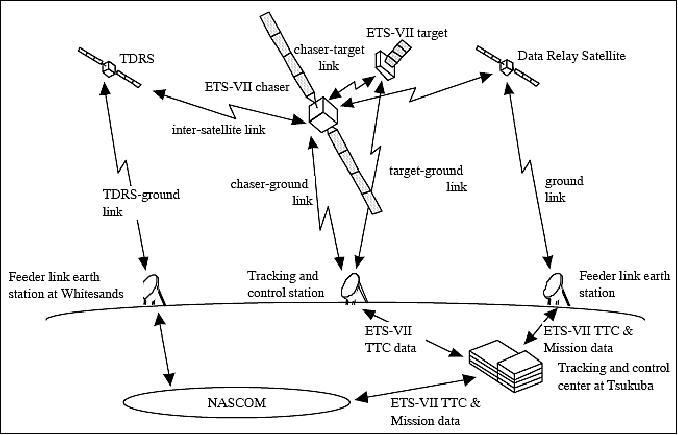
The RVD (Rendezvous and Docking) and RBT (Space Robotic) experiments are performed mainly via SSA HG link because of the high data rate required for teleoperation. The USB/SSA OMNI link is considered backup. The Target satellite has a USB link; however, the Chaser-Target link is also used to control and monitor the target.
Communication link | SSA HGA | USB/SSA OMNI | C (Chaser) | |
SSA OMNI | USB | |||
Command data | 4 kbit/s | 125 bit/s | 500 bit/s | 125 bit/s (C→T) |
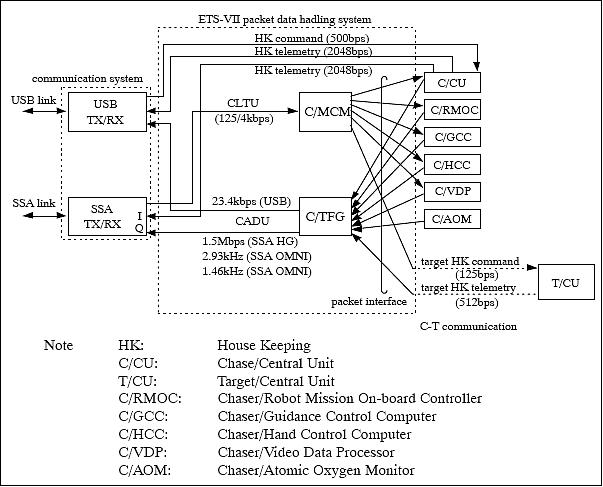
For commanding, the bit rate is variable according to the link. The data is HK (Housekeeping) command, teleoperation and non-teleoperation command for RVD and RBT experiments. The CCSDS (Consultative Committee for Space Data Systems) protocol is being used for all data handling.
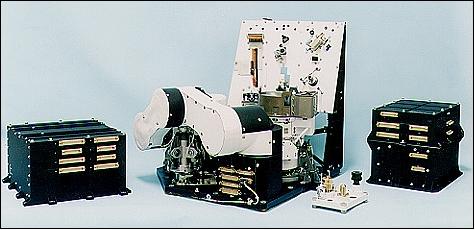
Robot system: A compact robot system was designed to perform precise space telerobotic experiments under the limitations of volume, mass and power budget of ETS-VII. The volume of the experimental robotic unit in the stowed configuration is 50 cm x 48 cm x 48 cm. The total mass of the onboard robot system is 45 kg. The average power consumption of the system is about 80 W including the consumption of 29 W by the power unit and control computer. The experimental robotic unit including a mini-arm, a hand, a hand exchange platform, a task board and latch mechanisms weighs 27 kg. The hand is separated from the arm and fixed to the stage by a latch mechanism on the hand exchange platform during launching. The arm has a tool to connect the hand.
Robot arm length | 2 m with 6 DOF (Degree of Freedom) maneuvering capability |
Robot arm drive | DC brushless motors; harmonic drive gear train |
Robot arm positioning | 1.3 mm positioning accuracy at endtip |
Robot arm commanding | Teleoperation from a ground station via TDRS |
Robot arm manufacturer | Designed and manufactured by Toshiba Co., Tokyo |

Launch
A launch of ETS-VII took place on Nov. 27, 1997 (UTC) from the Tanegashima Space Center (Japan) on the H-2 launch vehicle. ETS-VII experienced an attitude stability problem on Nov. 30, 1997 that could be corrected.
• A further payload on this flight was the TRMM spacecraft, a joint mission of NASA/NASDA.
Orbit: Circular orbit, altitude = 550 km, inclination = 35º, period = 96 minutes.
Mission Experiments
Rendezvous-Docking Experiment (RVD)
The overall objective was to acquire/retrieve materials to/from a satellite in orbit. The following experiments were carried out:
• Demonstration of rendezvous-docking (RVD) equipment in orbit
• Evaluation of both automatic and remotely piloted rendezvous-docking in orbit
• Demonstration of simultaneous operation of two spacecrafts.
To enable the unmanned autonomous rendezvous docking experiment, the Rendezvous docking equipments: GCC (Guidance Control Computer), DM (Docking Mechanism), PXS (Proximity Sensor), RVR (Rendezvous Laser Radar), and GPSR (GPS Receiver) are developed and used in the Rendezvous-docking demonstrations.
For each experiment, the chaser satellite detaches the target satellite and drifts away to distances of up to 9 km; subsequently, a rendezvous-docking maneuver brings the chaser satellite back close to the target resulting in a final docking maneuver.
The rendezvous-docking operations were conducted from the NASDA ground stations using NASA's TDRS (Tracking and Data Relay Satellite) system. 6) 7) 8) 9)
1) On July 7, 1998, the first experiment was successfully performed. In this flight, autonomous docking from 2 m was demonstrated. The Chaser detached the Target based on “separation command” from the ground. The Chaser automatically conducted formation flight for 15 minutes at the range of 2 m from the Target and docked again. The Chaser conducted six degree-of-freedom (6DOF) control using the PXS navigation.
2) The second rendezvous docking experiment was initiated on Aug. 7, 1998 (it lasted until Sept. 1, 1998). In this flight attitude anomalies occurred, and the Chaser made a flight to 12 km in range. As a result, the Chaser successfully docked with the Target on Aug. 27 using not only the PXS navigation but also the relative GPS navigation and the RVR navigation.
3) The third experiment flight was performed in Oct. 26-27, 1999 with the following test sequence: 1) Flight remotely controlled from the ground; 2) Collision Avoidance Maneuver (CAM) flight; 3) R-bar approach flight (approaching from the side of the Earth).
Through these experiment flights, the autonomous rendezvous docking technologies from the relative approach to the docking (from 10 km to docking) were verified on orbit. 10) 11)

Space Robotic Experiments (RBT)
The objective was to acquire the basic capability to teleoperate a space robot and to analyze the engineering data for the development of future advanced space robots. 12) 13)
• After the successful launch and initial check out of the satellite, various space robot experiments were conducted between Mar. 1988 to May 1999. All planned robotic experiments were successfully conducted. Further experiments were additionally conducted until Nov. 1999.
• On March 16, 1999 NASDA conducted successfully the telemanipulation experiment of the robot arm on ETS-VII. Objective: to evaluate (compare) the difference of operation of the Shuttle remote manipulator and the ETS-VII onboard robot arm.
• Joint NASDA-ESA experiments: In the period April 6-9, 1999, ESA demonstrated autonomous robot manipulations and robot user interactions with VIABLE (Vision Interactive Autonomy Bi-Lateral Experiment). The ESA experiments concerned advanced schemes for planning, commanding, controlling and monitoring the activities of a space robot arm system. One set of experiments tests an operational mode called “interactive autonomy”, whereby the robot motions are split into typical “tasks” of medium complexity. Ground operators can interact with the tasks (parameterizing, commanding, rescheduling, monitoring, interrupting them as needed), relying on the fact that each task is autonomously executed using appropriate sensor-based control loops. The second group of experiments dealt with vision-based robot control. Using the Japanese-provided on-board vision system (including a hand camera and a scene-overview camera). It has been demonstrated that reliable automatic object localization and grasping can be performed even without the artificial markers which are typically used to guide telemanipulation. 14) 15)
• Joint NASDA-DLR and IRF (Institute for Robotics Research), University of Dortmund) experiments. Teleoperation experiments of the onboard robot arm on ETS-VII were conducted April 19-21, 1999. The GETEX (German Teleoperation Experiment) ground control system of DLR/IRM was installed at the Tsukuba Space Center and linked to NASDA's robot experiment system. Each operation in the experiment was conducted controlling the robot arm on HIKOBOSHI from GETEX - consisting of one workstation and 4 PCs. The following experiments were conducted: 16) 17) 18) 19) 20)
- Evaluating the motion of the satellite attitude during onboard robot arm operations
- World model update for onboard robot operations
- Tele-manipulating the onboard robot using virtual reality technology.
Toward practical satellite servicing: In the ETS-VII flight experiments, the entire sequence of the capture of a free-floating target was not demonstrated continuously; however, all necessary key elements were verified in a stepwise approach. The technology necessary for the orbital maneuvers in a close target approach as well as rendezvous and precise proximity flight control, has been successfully demonstrated with the ETS-VII's main satellite (chaser) and a target satellite separated from the chaser. Three different flight paths called FP-1, -2 and -6, including contingency maneuvers, were tested and all resulted in an autonomous safe soft-docking. 21) 22)
Six CCD cameras, two for RVD and four for RBT, were onboard to monitor the dynamic RVD and RBT operations for on-ground visualization. A pair of hand cameras were also mounted on the end-effector. Those were used as an onboard vision sensor for the visual servicing control of the manipulator.
Mission Status
All initially planned flight experiments were successfully completed by the end of May 1999. But since the spacecraft was still operational and in a good condition, an extended mission period of seven months was set up until the end of December 1999. In this period the opportunity was opened for academic proposals and research groups of Japanese universities; they were given the time to do their flight experiments. 23)
Some of these extended flight experiments were:
• On Sept. 1, 1999 the first successful Target Capture experiment of ETS-VII took place (proposed by Tohoku University, Japan). The communication window (between Tsukuba and ETS-VII via TDRS) of three successive overpasses was used, providing about 20 minutes of command link on each pass. The objective was to capture of the target satellite - thus, to verify the dynamics and control of a free-flying space robot for future satellite servicing. 24) 25) 26)
In the experimental setup, the satellites' docking mechanism was first released, allowing Orihime to float freely within certain limits; specifically, Orihime was made to float about 200 mm from the robot arm aboard Hikoboshi. Starting from this state, the robot arm then automatically approached Orihime without assistance from the ground, and successfully grasped the handle on Orihime using the finger attached to its tip. The successful release, tracking, and capture of the satellite without help from the ground was a first in space history. Previous automatic docking activities, such as those conducted with Russian Soyuz and Progress spacecraft, have used either operator assistance or ground control computers. The United States has not conducted a robotic docking in space.
The experiments for the study of Reaction Dynamics involved:
1) Manipulator operation that yields minimum reaction on the base satellite a) Reaction Null-Space, b) Zero Reaction Maneuver (reactionless manipulation - yielding zero attitude disturbance on the base during the manipulation)
2) Manipulator endpoint control for inertial target under the free-floating environment
3) Terminal state control for free-floating space robot
4) Base attitude control for quick recovery from the manipulator motion disturbance
• Tokyo Institute of Technology: Evaluation of the robot arm's vibrations
• Kyoto University: Robot teleoperation experiment
• Toshiba Co.: Vision data processing experiment.
After the successful completion of the above experiments, NASDA conducted a check-out of ETS-VII to test the satellite's functions and ability on December 15 and 16, 1999 and finished the all mission oriented tasks. - However, since ETS-VII has still enough fuel and power to continue the operation of the satellite platform, the satellite is being used to maintain the skill of the satellite operators to track and control the satellite even after the completion of the mission.
Some of the key experiments executed during the ETS-VII mission include: 27)
• Visual inspection of on-board equipment by a robotic vision system
• ORU (Orbit Replaceable Unit) handling and simulated fuel supply experiments
• Handling of small equipment by ETS-VII small robot arm including the use of a taskboard handling tool
• Handling of truss structures
• An antenna assembly experiment
• Ground teleoperation of the ETS-VII robot
• Handling and berthing of the 410 kg ETS-VII target satellite with ETS-VII robot on chaser satellite
• Rendezvous and docking by the ETS-VII chaser satellite with the ETS-VII target satellite.
Operation of the ETS-VII satellite was terminated on October 30, 2002. ETS-VII was operated for nearly 5 years after completion of all planned robotics / rendezvous docking technology experiments within the first 2 years (Ref. #.
References
1) http://www.jaxa.jp/projects/sat/ets7/index_e.html
2) K. Yoshida, “ETS-VII Flight Experiments For Space Robot Dynamics and Control,” http://www.ri.cmu.edu/events/iser00/papers/yoshida_flight.pdf
3) Kohtaro Matsumoto, Sachiko Wakabayashi, Masahiro Noumi, Tetsuji Yoshida, Hiroshi Ueno, Yutaro Fukase, “Space Truss Handling Experiment on ETS-VII,” Automation and Robotics in Construction XVI, 1999, UC3M, URL: http://www.iaarc.org/publications/fulltext/Space_truss_handling_experiment_on_ETS-VII.PDF
4) H. Anegawa, S. Furushima, “CCSDS Packet Data Handling System of ETS-VII,” 1998, URL: http://track.sfo.jaxa.jp/spaceops98/paper98/track5/5e007.pdf
5) H. Anegawa, M. Mori, N. Takada, S. Furushima, J. Oshima, H. Sinmura, “CCSDS packet data handling system of ETS-VII,” AIAA 17th International Communications Satellite Systems Conference and Exhibit, Yokohama, Japan, Feb. 23-27, 1998, paper: A98-18881 03-32
6) I. Kawano, M. Mokuno et. al., “Result of Autonomous Rendezvous Docking Experiment of Engineering Test Satellite VII, ” Journal of Spacecraft and Rockets, Vol.38, No.1, Jan.-Feb, 2001. p.105
7) I. Kawano, M. Mokuno, T. Miyano, T. Suzuki, “Analysis and Evaluation of GPS Relative Navigation Using Carrier Phase for RVD Experiment Satellite of ETS-VII,” ION GPS-2000, Sept. 19-22, 2000, Salt Lake City, UT, pp. 1655-1660
8) M. Mokuno et. al., “Experimental Result of Autonomous Rendezvous Docking on Japanese ETS-VII satellite,” Proceedings of the Annual AAS Guidance and Control Conference, AAS99-022
9) Y. Ohkami, I. Kawano, “Autonomous rendezvous and docking by engineering test satellite VII: a challenge of Japan in guidance, navigation and control - Breakwell memorial lecture,” Acta Astronautica, Vol. 53, Issue 1, July 2003, pp. 1-8
10) Teleoperation Experiments of Engineering Test Satellite VII (ETS-VII) Mounted Robotic Arm,” Tohoku University, URL: http://www.space.mech.tohoku.ac.jp/research/etsvii/etsvii-e.html
11) M. Oda, “Motion control of the satellite mounted robot arm which assures satellite attitude stability,” Acta Astronautica, Vol. 41, Issue 11, December 1, 1997, pp. 739-750
12) http://robotics.jaxa.jp/project/ets7-HP/index_e.html
13) Mitsushige Oda, “Space robot experiments on NASDA's ETS-VII satellite,” URL: http://robotics.jaxa.jp/project/ets7-HP/ets7_j/oda/ISRR99_M_Oda.pdf
14) G. Visentin, F. Didot, “Testing Space Robotics on the Japanese ETS-VII Satellite,” ESA Bulletin No. 99, Sept. 1999, pp. 61-65, URL: http://www.esa.int/esapub/bulletin/bullet99/visen99.pdf
15) “ESA successfully conducts experiment in Advanced Space Robotics on Japanese satellite,” URL: http://www.esa.int/esaCP/Pr_5_1999_i_EN.html
16) G. Hirzinger, K. Landzettel, B. Brunner, M. Fischer, C. Preusche, D. Reintsema,A. Albu-Schäffer, G. Schreiber, B.-M. Steinmetz, “DLR's robotics technologies for on-orbit servicing,” Advanced Robotics, Vol. 18, No 2, March 1, 2004, pp. 139-174
17) E. Freund, J. Rossmann, “Space robot commanding and supervision by means by projective virtual reality: the ERA experiences,” Proceedings of SPIE, Vol. 4195, Boston, MA, Nov. 5-8, 2000, paper: 4195-34
18) G. Hirzinger, B. Brunner, R. Lampariello, K. Landzettel, J. Schott, B.-M. Steinmetz, “Advances in orbital robotics,” Proceedings of IRCA 2000 (IEEE International Robotics and Automation Conference), San Francisco, CA, April 24-28, 2000
19) “German Technology Experiment on ETS-VII,” URL: http://www.dlr.de/rm-neu/en/desktopdefault.aspx/tabid-3827/5969_read-8749/
20) K. Landzettel, B. Brunner, K. Deutrich, G. Hirzinger, G. Schreiber, B.M. Steinmetz, “DLR/NASDA's Joint Robotics Experiments on ETS VII,” ETS VII Symposium, Tokyo, Japan, March 14, 2000, URL: http://www.robotic.dlr.de/fileadmin/robotic/lampo/ets7-tokyo.pdf
21) I. Kawano, et al, “First Results of Autonomous Rendezvous Docking Experiments on NASDA's ETS-VII Satellite,” Proceedings. of the 49th International Astronautical Congress, Melbourne, Australia, Sept.28-0ct.2, 1998, paper: IAF-98-A3.09, 1998.
22) Y. Fukushima, N. Inaba, M. Oda, “Capture and berthing experiment of a massive object using ETS-VII's space robot - World's first on-orbit satellite capture experiment by space robot system,” AIAA/AAS Astrodynamics Specialist Conference, Denver, CO, Aug. 14-17, 2000
23) K. Yoshida, D. N. Nenchev, N. Inaba, M. Oda, “Extended ETS-VII Experiments for Space Robot Dynamics and Attitude Disturbance Control,” URL: http://www.astro.mech.tohoku.ac.jp/~yoshida/ETS-VII/presentation.PDF
24) K. Yoshida, K. Hashizume, S. Abiko, “Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically Redundant Arm,” Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Korea, May 21-26, 2001, pp. 441-446., URL: http://www.astro.mech.tohoku.ac.jp/~yoshida/ETS-VII/ICRA-2001-paper.pdf
25) K. Yoshida, K. Hashizume, S. Abiko, ”Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically Redundant Arm,” Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Korea, May 21-26, 2001, pp.441-446., presentation, URL: http://www.astro.mech.tohoku.ac.jp/~yoshida/ETS-VII/ICRA-2001-presen.pdf
26) M. Oda,, “Experiences and lessons learned from NASDA's ETS-VII robot satellite, 51st IAF International Astronautical Congress, Rio de Janeiro, Brazil, Oct. 2-6, 2000, IAF-00-U.5.04
27) P. Malaviarachchi, T. J. Reedman, A. C. M. Allen, D. Sinclair, “A Small Satellite Concept for On-Orbit Servicing of Spacecraft,” Proceedings of the 17th AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2003, SSC03-IV-5, URL: http://www.sinclairinterplanetary.com/SSC03-IV-5.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).