FASTRAC (Formation Autonomy Spacecraft with Thrust, Relnav, Attitude and Crosslink)
EO
Mission complete
Quick facts
Overview
| Mission type | EO |
| Mission status | Mission complete |
| Launch date | 20 Nov 2010 |
FASTRAC (Formation Autonomy Spacecraft with Thrust, Relnav, Attitude and Crosslink)
Spacecraft Launch Mission Status References
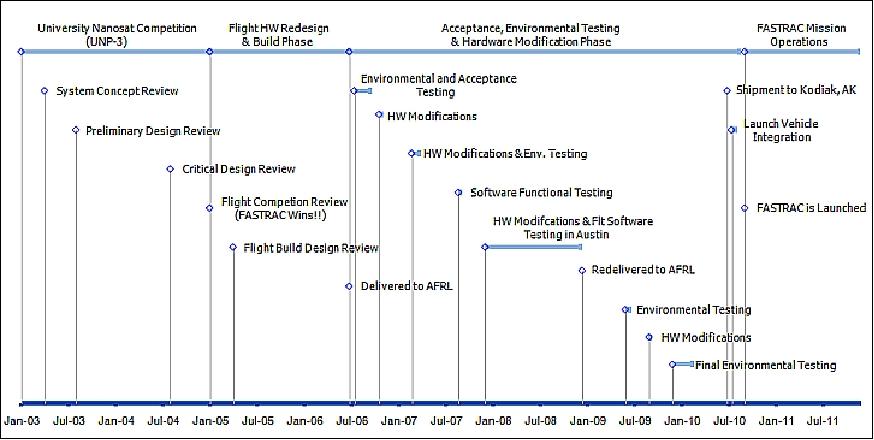
FASTRAC is a nanosatellite pair (actually a microsatellite pair by convention) of the University of Texas at Austin (UT-Austin), TX - and the winner of the UNP-3 (University Nanosatellite Program-3) contest in January 2005 (announcement of contest in 2003). The competition rules stipulated that the satellites must weigh < 30 kg (total) and cost less than $100,000. The project is part of a program sponsored by AFRL (Air Force Research Laboratory) whose goal is to lead the development of affordable space technology.
The overall objective of the FASTRAC technology demonstration mission is to investigate enabling technologies crucial for satellite formations, including on-orbit micro-thrust capability, relative navigation, attitude determination, and satellite crosslink communications. This will be achieved by taking on-orbit data from a pair of twin satellites that will separate once in orbit. The data will be gathered through a network of civilian ground stations and evaluated through post-processing of the recombined downlink message. 1) 2) 3) 4) 5)
The goal of the FASTRAC mission is to demonstrate enabling technologies for nanosatellites that work together in space. The primary mission objectives are:
• Demonstrate two-way intersatellite crosslink with verified data exchange
• Perform on-orbit real-time GPS relative navigation between satellites
• Demonstrate autonomous thruster operation using single-antenna on-orbit real-time GPS attitude determination.
Overview
UNP is a joint program between the Air Force Research Laboratory's Space Vehicles Directorate (AFRL/RV), the Air Force Office of Scientific Research (AFOSR), and the American Institute of Aeronautics and Astronautics (AIAA). The objectives of the program are to educate and train the future workforce through a national student satellite design and fabrication competition and to enable small satellite research and development (R&D), payload development, integration and flight test.
UNP started in January 1999 as collaboration between nine universities, the Defense Advanced Research Projects Agency (DARPA), NASA, AFSOR and AFRL/RV. The original program conception was to launch all completed and delivered microsatellites using the Space Shuttle.
Approximately 18 months after the contest announcement, the completed FASTRAC spacecraft structures arrived at AFRL, Kirtland Air Force Base, NM, in June 2006 for integration and testing prior to launch. During operational assessments performed at AFRL, the GPS trial proved successful. Employing off the shelf technology, the spacecraft's twin sections demonstrated acknowledgement of each portion's position so as to perform formation flying.
In November 2007, FASTRAC was officially manifested for launch on STP-S26. At this point the launch vehicle was officially known to be a Minotaur IV rocket. Once manifested, the satellites were sent back to Austin to finish the flight software and perform additional hardware modifications required based on the mechanical shroud launch envelope. After a year in Austin, the satellites were then redelivered in December 2008 to AFRL to undergo a final round of environmental testing (Ref. 5).
Since its beginning, students have been managing and operating the FASTRAC project, from writing the initial proposal, managing the project, making design decisions, fabricating the hardware, testing the satellites, and after launch, operating the satellites and analyzing and post-processing their data. Through all this time, the project has relied on advice and guidance from Dr. E. Glenn Lightsey, the faculty principal investigator, other faculty members from UT-Austin, AFRL personnel, and industry experts.
In the span of the project lifespan to date, more than 120 students have been involved in all the phases of the project. Since FASTRAC is based in the Department of Aerospace Engineering & Engineering Mechanics, most of these students have come from within this department. The student team is integrated by both graduate and undergraduate students, where graduate students normally hold the supervisory positions on the project.
In addition to students, FASTRAC has had a substantial impact on the Department of Aerospace Engineering & Engineering Mechanics at UT-Austin. During the initial phase of the project, it served as a driving factor in establishing the SDL (Satellite Design Laboratory). As the project went through its development cycle, other facilities added to support it and complement the SDL. These facilities at UT-Austin now include the SCC (Spacecraft Control Center), the Sensors & Actuators Laboratory, and the FIL (Flight Integration Laboratory).
Spacecraft
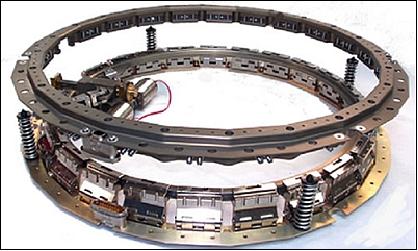
The satellites were student designed and built at SDL (Satellite Design Laboratory) of UT-Austin. A hexagonal isogrid type structure was selected for the FASTRAC satellites, composed of two titanium adapter plates, 6061 T-6 aluminum side panels, six hollow outer columns with inserts, and six inner columns. A single structure is composed of two base plates, six side plates, and six vertical square tubes and square tube inserts. The completed structures measure 20.84 cm in height and 47.50 cm in diameter. The mass of each isogrid structure is close to 5 kg, representing nearly 1/3 of the total mass budget for one satellite. The launch mass of the microsatellite pair is 54 kg.

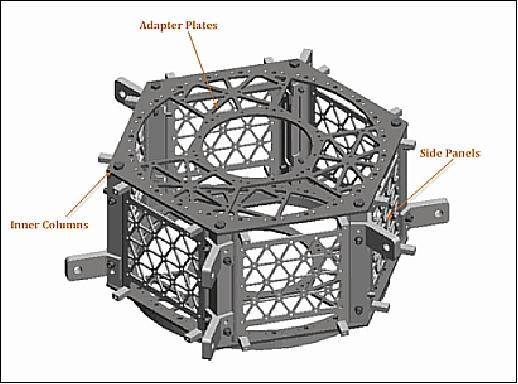
Figure 3: The isogrid structure of a spacecraft (image credit: UT-Austin)
Sensor Complement
GPS / Attitude Determination System
The system utilizes GPS code measurements, as well as antenna signal-to-noise ratio (SNR) and 3-axis magnetometer measurements to provide estimates of position, velocity, and attitude. Each satellite provides redundant GPS receivers and dual cross-strapped antennas. The GPS receiver is being used for coarse pointing information. FASTRAC's only on-board attitude determination requirement is to know when the MPT is favorably aligned for thrusting to extend the orbit lifetime (~15º of direction knowledge is considered sufficient for this requirement). In post-processing, the magnetometer and GPS receiver measurements may be combined to determine 3-axis attitude to within a few degrees.
The GPS receiver, named Orion, was developed at UT-Austin, based on the Zarlink\Mitel GPS chipset. The Orion receiver has been outfitted with a software package designed at the university which allows the receiver to calculate the satellite's position, velocity, and attitude in real-time. With data exchange from another Orion receiver, the relative position, velocity, and attitude between the two satellites can be computed and reported in each receiver's output data stream.
EPS (Electrical Power Subsystem)
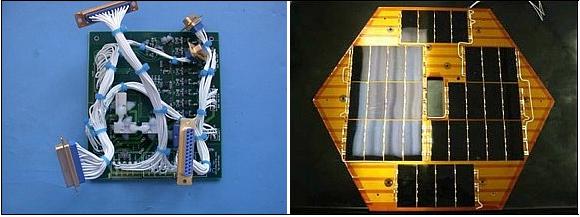
EPS is composed of eight solar panels, a VREG (Voltage Regulator) box, and a battery box. The battery holds 10 Sanyo N4000-DRL D-cells provided to the team by AFRL. Both the solar panels and the VREG board were designed and made in-house. On each satellite, the VREG board distributes power from three VICOR VI-J00 voltage regulators, and also charges the batteries with power collected from the solar panels.
Power is provided by surface-mounted solar cells of Spectrolab Inc. (single junction GaAs/Ge CIC with 19% efficiency). The design allows for 18 strings located on the top satellite, and 16 strings on the bottom satellite. Each spacecraft is providing 15 V of average power.
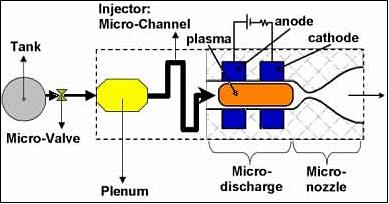
Propulsion subsystem
The propulsion subsystem uses a MDPT (Microdischarge Plasma Thruster) design, developed at the Propulsion Research Lab of UT-Austin. The primary objective is to provide station keeping propulsion for the formation. The thruster channels and superheats an inert gas through a microchannel nozzle producing a micro-Newton (µN) level of thrust. A single MDPT unit is installed into FASTRAC-1 (Sara Lily). MDPT uses a custom made composite tank from CTD. The operation of the thruster will be automated by the spacecraft's C&DH system using the attitude measurements provided by the GPS attitude determination system.
Two thruster nozzles will be utilized to increase the probability of proper thruster alignment. The mass of the propulsion subsystem is ~ 2 kg, mostly due to the propellant tank and the electrical components.
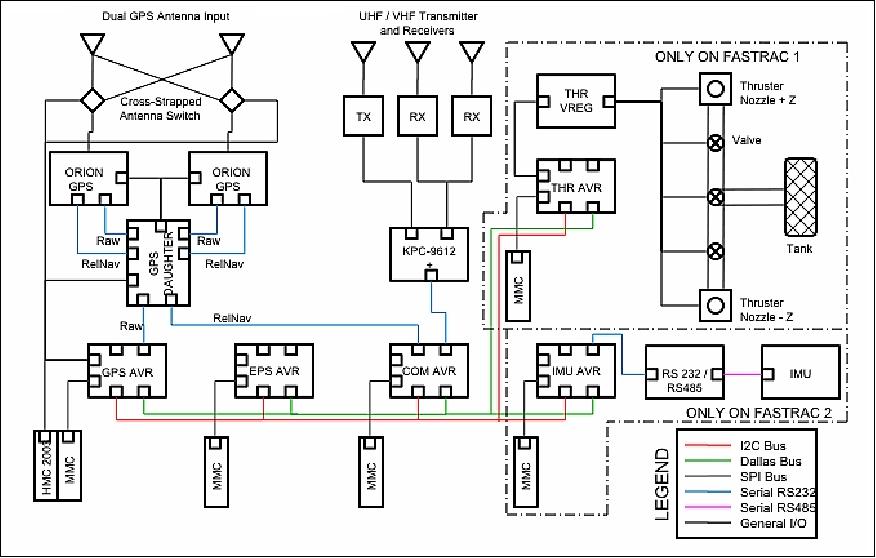
C&DHS (Command & Data Handling Subsystem)
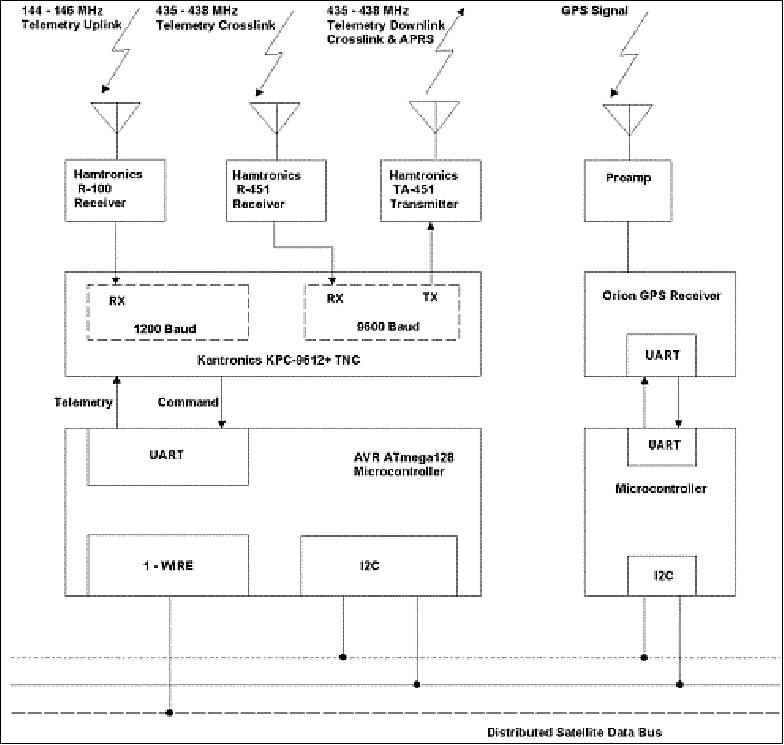
The design is based on an architecture developed by SCU (Santa Clara University) of Santa, Clara, CA. This system utilizes a distributed design based on 8 bit Atmel AVR microprocessors. Onboard inter-system communications is being conducted over a 2 wire I2C bus which is built into the AVR microprocessors. 6)
C&DHS consists of four SCU developed AVR-Sat microcontroller systems. Each AVR-Sat contains one AVR Atmega 128 RISC microcontroller at 16 MHz. Each AVR controls one of the four C&DHS subsystems. Three of the subsystems are identical on the two spacecraft: communications, EPS, and global positioning. Additionally, one satellite contains a propulsion subsystem to control the MDPT, while the other satellite contains an IMU (Inertial Measurement Unit).
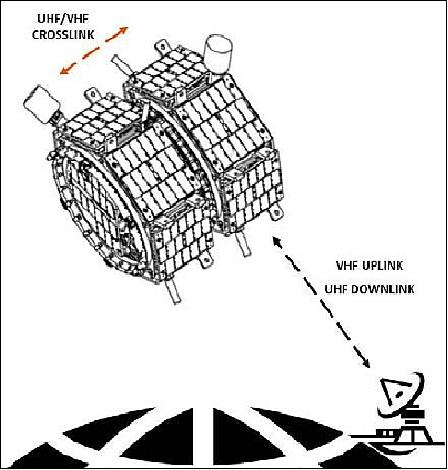
RF communications
The architecture is based on a system which was flown on PCSat2 onboard the ISS (International Space Station). Note: PCSat2 is an Amateur Radio Satellite of USNA (US Naval Academy) at Anapolis, MD. The PCSat2 operations on ISS started in Aug. 2005 and lasted until Sept. 2006 when it was returned to Earth on Shuttle flight STS-115.
The FASTRAC communications subsystem interfaces with a TNC (Terminal Node Controller) and an Orion GPS unit, both connected to the serial ports of the Atmega 128. The TNC supports 9600 and 1200 baud connections. The subsystem is responsible for three tasks:
- Establishing an autonomous crosslink between the two satellites to exchange GPS data from the Orion GPS
- Managing ground station connections and supporting dual frequency uplink capabilities,
- Updating the radio beacon text (BTEXT) message with current satellite status information.
The primary satellite uplink is conducted on the amateur 2 m band (VHF) at 1200 baud. The satellite's downlink is conducted on the amateur 70 cm band (UHF) at 9600 baud. The satellite's transmitted signal is used for two primary purposes; it acts as the data downlink to Earth, as well as for the intersatellite data link (crosslink) of the FASTRAC satellites. Therefore, each satellite is also required to have a 70 cm receiver (UHF), which can also act as a secondary uplink receiver if necessary.
Link | FASTRAC-1 (Sara Lily) | FASTRAC-2 (Emma) |
Downlink | 437.345 MHz, FM | 145.825 MHz, FM |
Beacon | 437.345 MHz, AX.25 1200, AFSK | 145.825 MHz, AX.25 1200, AFSK |
Uplink (1.2 kbit/s) | 145.980 Mhz, FM | 435.025 Mhz, FM |
Uplink (9.6 kbit/s) | 145.825 Mhz, FM | 437.345 Mhz, FM |
Since the satellites will communicate on amateur radio frequencies, the team is also engaging amateur radio operators to help track the satellites.
The ground station of UT-Austin will be used for spacecraft operations and monitoring. In addition, UT-Austin in conjunction with SCU (Santa Clara University) in California, and Leeward Community College in Pearl City, Hawaii are developing a distributed ground station network. The network will be remotely scheduled and controlled via the RACE (Remote Accessible Communications Environment) ground station network control system developed by SCU. Use of the network will allow for increased downlink opportunity and for the first civilian satellite tracking network of its kind.


Legend to Figure 12: STPSat-2 (left most), FASTRAC-1/-2 (front center), FalconSat-5 (right most), and FASTSat (back) are visible in this image.
Launch
FASTRAC was launched as a secondary payload on Nov. 20, 2010 (UTC). The launch vehicle was a Minotaur-IV rocket of OSC, the launch site was KLC (Kodiak Launch Complex) on Kodiak Island, Alaska. The launch of FASTRAC is donated by the USAF (US Air Force) on the STP-S26 (Space Test Program-S26) primary mission.
The primary payload of the mission is STPSat-2, further secondary payloads are: FalconSat-5, FASTSat-HSV-1, NanoSail-D, O/OREOS, and RAX.
Note: In the time period 2010, the multi-satellite launch of the STP-26 mission has been delayed to May 28, then to September, then to October, and further to November 2010.
Orbit: The STP-S26 mission will deliver four ESPA-class satellites and two microsatellites to a 650 km circular orbit at 72º inclination. The HAPS (Hydrazine Auxiliary Propulsion System) will then deliver two ballast masses to a secondary orbit as high as possible with a goal of 1200 km (circular), demonstrating the dual orbit capability of the Minotaur IV launch vehicle.
The FASTRAC satellites will be launched in a stacked configuration and remain stacked for a checkout period of about two weeks.
Separation system: The PSC (Planetary Systems Corporation, Silver Spring, MD) lightband separation system will be used to eject the FASTRAC microsatellite pair from the ICU (internal Cargo Unit) canister as well as control the separation of FASTRAC-1 and FASTRAC-2. The separation system is composed of two spring loaded rings and a motorized release mechanism. 7)
In 2010, the project nicknamed the two spacecraft: FASTRAC-1 is called Sara Lily while FACTRAC-2 is called Emma.
Orbit: Sun-synchronous circular orbit, altitude = 650 km, inclination = 72º, with an orbital period of 97.7 minutes.
The planned mission life is 6 months. The two primary instruments of the mission are the demonstration of the GPS Relnav (Relative Navigation) experiment and the MDPT (Microdischarge Plasma Thruster).
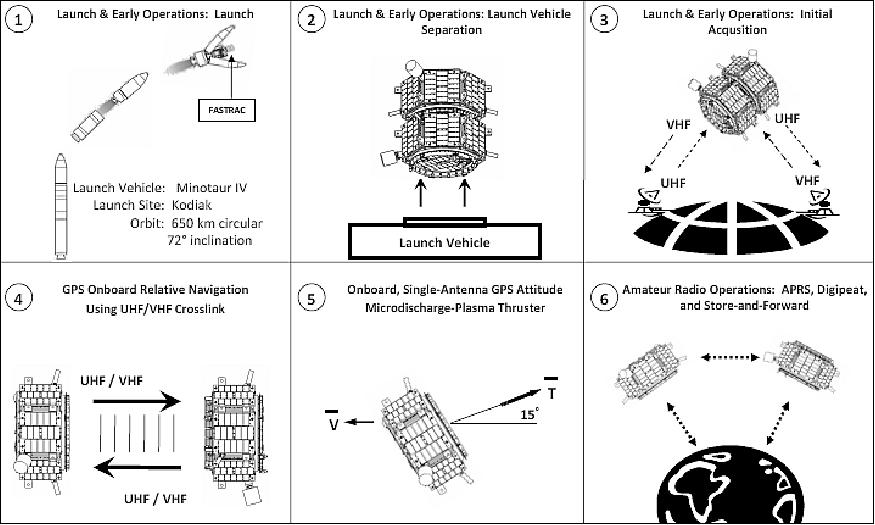
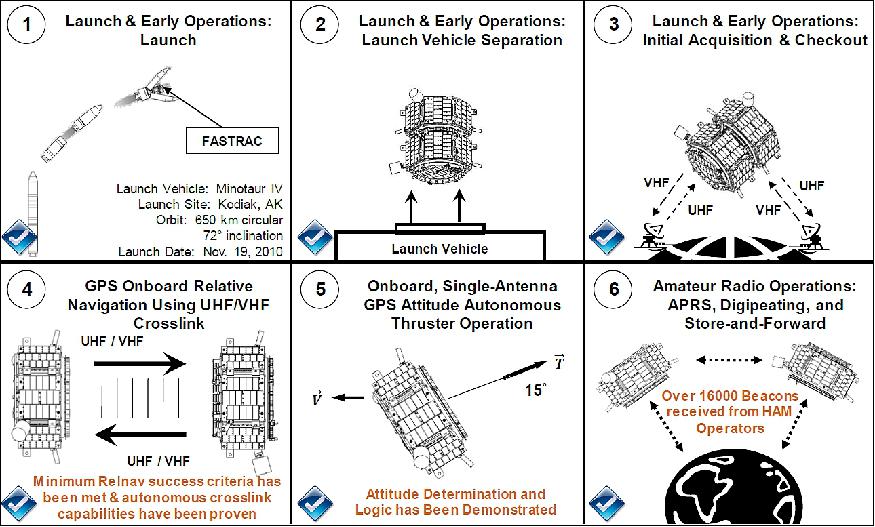
The FASTRAC concept of operations consists of six operational phases, shown in Figure 14.
1) Launch
2) Launch vehicle separation
3) Initial acquisition and checkout
4) GPS onboard relative navigation
5) On-board single antenna GPS attitude autonomous thruster operation
6) Amateur radio operations.
After six months of operations, most of the phases have been completed and it is expected that all will be completed by the end of 2011.
Mission Status
• May 2014: The FASTRAC nanosatellite (27 kg each) mission is still operational, launched in Nov. 2010. 8)
• August 2012: Since launch, the FASTRAC satellites have achieved full success criteria for most of their mission objectives and minimum success criteria for all of them. The only mission objective that will not be able to fully achieved is on-board real-time relative navigation by two freely drifting satellites. One of the microcontrollers responsible for this activity has stopped responding to ground commands. All of the data gathered from the satellites thus far that has been processed has shown that all the subsystems have worked as expected.
The FASTRAC team expects to continue operating the satellites through the end of summer 2012 to collect more data. After this is finished, the satellites will be made available for the amateur radio operator community to be used as digipeaters. The satellites will also be made available as training tools in satellite operations for the Satellite Design Lab as well as by other schools that are participating in the University Nanosat Program to verify the operation of their ground stations. 9)
• In Dec. 2011, the FASTRAC satellites have been in operation for more than a year and the team has been able to get a lot of data from them, in great part due to the amazing support from the amateur radio community.
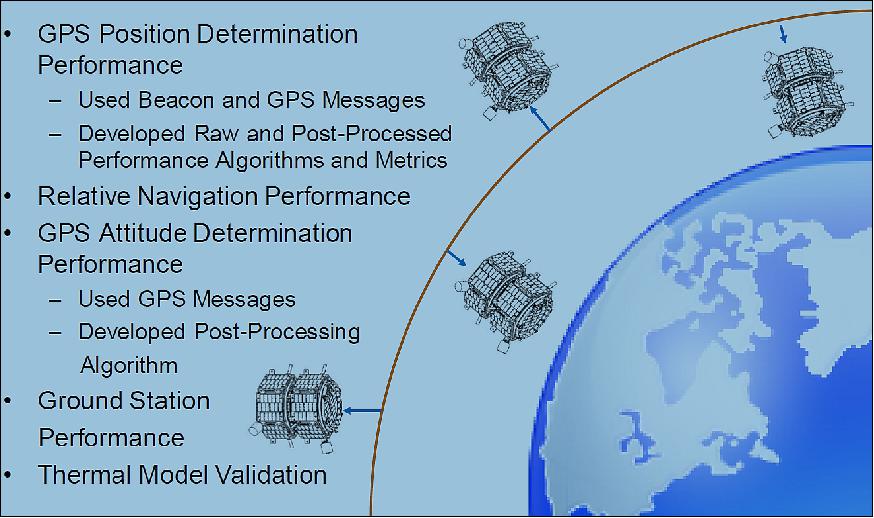
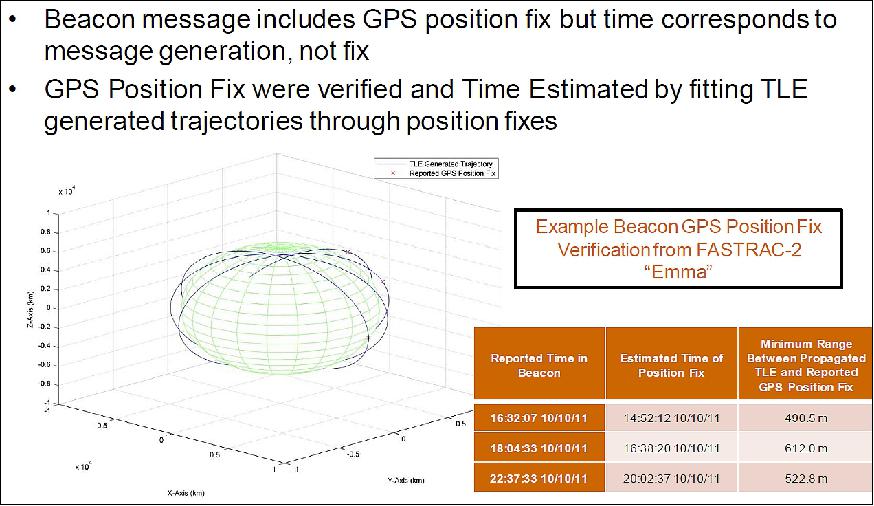
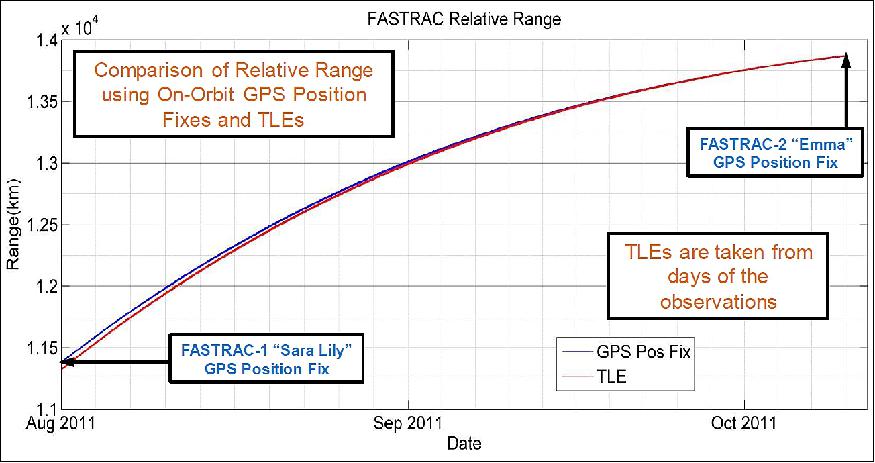
• During the first six months of operations in 2011, the operations team has been able to download hundreds of messages from the satellites. The telemetry recorded so far includes GPS messages, satellite health messages, IMU messages, and thruster messages. These messages have allowed the team to determine how the satellites have been operating since launch.
In June 2011, the FASTRAC team started to post-process and analyze all of the data obtained from the satellites to quantify the performance of the GPS receiver, the primary experiment, in addition to other mission metrics to quantify the performance of the mission (Ref. 12).
It is expected that the sole remaining mission objective will be met in fall 2011 if the satellites continue to function nominally. The operation phase of the mission has provided some surprises and challenges since the launch, but the student team has managed to overcome all the obstacles with the help of their partner ground station, JSCARC, and with the help of many participating amateur radio operators from around the world. As of June 3, 2011 amateur radio operators have uploaded more than 6000 beacon messages. This worldwide network of amateur radio operators has provided global coverage and yielded substantially more data than the team could ever have hoped to collect on their own (Ref. 12).

The last phase of the mission will be to turn the satellites over to the amateur radio community so they can be used as part of the APRS network as well as digital repeater stations. This will enable amateur radio operators to digipeat through the satellites. With this objective in mind, the team has obtained OSCAR (Orbiting Satellite Carrying Amateur Radio) designations for both satellites which are FO-69 for Sara Lily and FO-70 for Emma.
• On May 13, 2011, the UT-Austin ground station ran autonomously via the automation scripts for a complete satellite pass and downloaded GPS data from Sara Lily without any operator assistance (Ref. 12).
• In April 2011, the project receives routinely data from both satellites. 10)
- Both satellites' GPS receivers are obtaining position fixes on-orbit
- Both satellites' GPS receivers are computing real-time on-orbit attitude solutions
- Both satellites are healthy
- Both satellites have crosslinked and exchanged GPS data.
• The ground station has been operating semi-autonomously (records all passes autonomously).
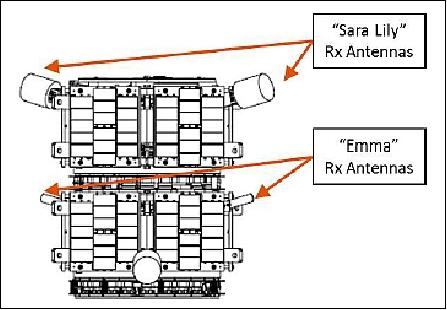
While the data mining operation was underway by commanding both Emma and Sara Lily as before, both the UT-Austin and JSCARC ground stations attempted to connect directly to Emma during some of these passes. Although nothing was expected based on previous behavior, on March 23, 2011, the JSCARC team was able to contact Emma directly for the first time since the satellites were launched during a 60º max elevation pass. It is believed that this was possible because after separation the receive (Rx) antennas on Emma had less interference from the structure as compared to when the satellites were in stacked configuration, as shown in Figure 20.
• The two satellites (Sara Lilly and Emma) separated successfully on March 22, 2011 (launch + 4 months) and communicate with each other.11) - This marked the start of the relative navigation phase of the mission, where two freely drifting satellites would attempt to autonomously perform on-orbit real-time relative navigation. After successfully separating the two satellites, the data mining operation began to download data that could show if the satellites had successfully cross-linked and performed on-orbit real time relative navigation (Ref. 12).
• Although Emma could not yet be commanded directly from either ground station (UT-Austin or JSCARC) in early march 2011, it was felt at this point by the FASTRAC team and supporting personnel that it was time to move forward with on-orbit separation. The ultimate goal of the mission was to verify that the satellites were capable of performing on-orbit real-time relative navigation with two freely drifting satellites. Given that the original procedure for separating the two satellites involved monitoring both of the satellites simultaneously, the team had to develop a new set of procedures to separate the satellites by commanding Sara Lily to digipeat the command to Emma to engage the separation mechanism (Ref. 12).
This restriction implied that a long list of commands had to be executed with just one satellite being actively commanded at one time. Because of the number of required commands, the separation procedure would have to be executed during two consecutive passes which were separated by a short amount of time. This approach would increase the likelihood of being able to download data that showed evidence of any active relative navigation information shortly after separation (Ref. 12).
• On December 13, 2010, the FASTRAC satellites were successfully rebooted. At this time, a decision was made to upgrade the UT-Austin ground station to reduce line losses and increase the output power on both UHF and VHF channels to command the satellites. - Upgrading the equipment in the ground station took approximately two months and the new configuration was ready for testing by mid-February 2011.
The performance upgrade for both the VHF and UHF uplink can be seen in Table 2. During this time the satellites continued to be operated through Sara Lily and data (especially GPS measurements) were routinely collected from both satellites in the stacked configuration.
VHF uplink to Sara Lily | Before upgrade | After upgrade |
Output power at radio or amplifier | 100 W | 350 W |
Line losses (~ 30 m) | 2.24 dB | 1.207 dB |
Output power at antenna | 59.7 W | 265.1 W |
UHF uplink to Emma | Before upgrade | After upgrade |
Output power at radio or amplifier | 75 W | 300 W |
Line losses (~ 30 m) | 3.97 dB | 2.14 dB |
Output power at antenna | 30.1 W | 183.2 W |
Once the ground station was upgraded, the performance was noticeably improved on Sara Lily as the satellites could now be commanded during previously unreachable 15 degrees maximum elevation passes. Unfortunately the performance improvement was not enough to close the command link with Emma when the team tried to command the satellite directly with the new setup in the ground station.
• Launch + 2 weeks: First successful command of "Emma" from UT-Austin. - After more than a week and half after trying to contact Emma from multiple ground stations, the ops team realized that there was another method to command the satellite. The satellites were originally designed with the purpose of turning them over to the amateur radio community so that they could be used as digipeaters and part of the APRS (Automatic Packet Reporting System) network. This digipeating capability (Figure 21) could be used to command Emma. Emma's subsystems were operating nominally.
- By default, when the satellites were turned on prior to separation from the launch vehicle, the GPS antenna that each satellite used was the GPS antenna located on the top solar panel. Being in stacked configuration, this meant that Emma had not been able to acquire any GPS satellites up until this point because the satellite's top antenna was facing the other satellite. From this point forward Emma was commanded to use the GPS antenna attached to the bottom solar panel which allowed sky view in the stacked configuration.
- At this point all of the subsystems on "Sara Lily" had already been checked out, including the GPS receiver developed at UT-Austin, which was able to obtain on-orbit real-time position and attitude solutions.
• The University of Texas at Austin Ground Station heard the FASTRAC beacon in its first pass over Austin on Nov. 20, 2010 (launch + 11 hours). During this first pass the team (Figure 22) was able to hear the satellites beaconing, but was not able to decode these beacons or command the satellites.
- Multiple passes later (~ a week) and with the help of continuous communication with members of AFRL, STP, and the other payload teams, it was determined that there was in fact a mix-up with the TLEs for each of the satellites. It took approximately five days for all the payloads to get the correct TLEs (Two Line Elements) at which point both the UT-Austin ground station and JSCARC (NASA JSC Amateur Radio Club) were able to decode beacon messages from the satellites.
- Once the TLEs were successfully determined, the members at JSCARC were the first to be able to command FASTRAC-1 "Sara Lily" successfully. One pass later at higher maximum elevation, this was also accomplished from the UT-Austin ground station. The data collected during these passes verified that FASTRAC-1 was operating nominally.

• About 5 hours after spacecraft deployment on Nov. 20, 2010, FASTRAC has been transmitting beacon and crosslink data which have been received by amateur radio operators in Europe. The ops team received news from DK3WN, an amateur radio operator in Europe, that the FASTRAC satellites had successfully been ejected from the launch vehicle and were alive and beaconing. Data captured by DK3WN (Germany) indicated the satellites were crosslinking and exchanging data autonomously in stacked mode, informing the team that all systems were functioning nominally. 12)
References
1) G. Holt, S. Stewart, J. Mauldin, T. Campbell, P. Eckhoff, H. Elmasri, B. Evans, M. Garg, J. Greenbaum, M. Linford, M. Poole, E. G. Lightsey, L. L. Raja, "Relative Navigation, Microdischarge Plasma Thruster, and Distributed Communications Experiments on the FASTRAC Mission," Proceedings of the 17th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, Aug. 11-14, 2003, paper: SSC03-XI-04
2) G. Holt, T. Campbell, E. G. Lightsey, "GPS, Distributed Communications, and Thruster Experiments on the University of Texas FASTRAC Mission," AMSAT 22nd Space Symposium and Annual Meeting, Arlington, VA, USA, Oct. 8-10, 2004
3) Cinnamon Wright, Dax Garner , Jessica Williams, Henri Kjellberg, E. Glenn Lightsey, "Bridging the Gap: Collaboration Using Nanosat and CubeSat Platforms Through The Texas 2 STEP (2 Satellite Targeting Experimental Platform) Mission," Proceedings of the 22nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2008, SSC08-X-8
4) Sebastián Muñoz, "The FASTRAC Satellites," 7th Annual CubeSat Developer's Workshop, CalPoly, San Luis Obispo, CA, USA, April 21-23, 2010, URL: http://www.cubesat.org/images/cubesat
/presentations/DevelopersWorkshop2010/3_1420_fastrac_cubesat_workshop_042310.pdf
5) Sebastián Muñoz, Jamin Greenbaum, Thomas Campbell, Greg Holt, E. Glenn Lightsey, "The FASTRAC Experience: A Student Run Nanosatellite Program," Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, paper: SSC10-XII-7
6) Aaron Smith, Sebastian Muñoz, Eric Hagen, Gregory P. Johnson, E. Glenn Lightsey, "The FASTRAC Satellites: Software Implementation and Testing," Proceedings of the 22nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2008, paper: SSC08-XII-4
7) Walter Holemans, "The Lightband as Enabling Technology for Responsive Space," AIAA 2nd Responsive Space Conference, April 19-22, 2004, Los Angeles, CA, RS2-2004-7005, URL: https://web.archive.org/web/20060515235112/http://www.responsivespace.com/Papers/RS2/SESSION%20PAPERS/SESSION%207/HOLEMANS/7005P.pdf
8) Katharine Brumbaugh Gamble, "A Software Tool for CubeSat Mission Risk Estimating Relationships," CalPoly Developers Workshop, May 1, 2014, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2014/Spring/Day%202/Speaker2_Gamble.pdf
9) Sebastián Muñoz, Richard W. Hornbuckle, E. Glenn Lightsey, "FASTRAC Mission Analysis and Results," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-VII-9, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?
filename=0&article=1067&context=smallsat&type=additional
10) E. Glenn Lightsey, Sebastián Muñoz, Katharine Brumbaugh, "The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects - FASTRAC, BEVO-2, & ARMADILLO," 8th Annual CubeSat Developers' Workshop, CalPoly, San Luis Obispo, CA, USA, April 20-22, 2011, URL: http://www.cubesat.org/images
/2011_Spring_Workshop/thur_p2.00_lightsey_texas_cubesat_2011_presentation.pdf
11) "First Student-Developed Mission In Which Satellites Orbit And Communicate Led By UT Students," Space Daily, March 28, 2011, URL: http://www.spacedaily.com/reports/First_Student_Developed_
Mission_In_Which_Satellites_Orbit_And_Communicate_Led_By_UT_Students_999.html
12) Sebastián Muñoz, Jamin Greenbaum, E. Glenn Lightsey, Thomas Campbell, Shaun Stewart, Greg Holt, "The FASTRAC Mission: Operations Summary and Preliminary Experiment Results," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-III-4
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).