HAUSat-2 (Hankuk Aviation University Satellite-2)
Non-EO
SSRL (Space Systems Research Laboratory)
Education
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Agency | SSRL (Space Systems Research Laboratory) |
HAUSat-2 (Hankuk Aviation University Satellite-2)
HAUSat-2 is the second satellite system development program of SSRL (Space System Research Laboratory) at Hankuk Aviation University, Goyang-City, Korea. HAUSat-1 was a CubeSat which experienced a launch failure on a multiple SmallSat launch from Baikonur on the Dnepr-1 vehicle (July 26, 2006).
The development of Smallsats offer graduate and undergraduate students great opportunities to perform a variety of functions in a multidisciplinary field, to understand integrated system engineering, and to experience the overall satellite design process, analysis, manufacturing, assembly, integration, test, launch and operation, as well as providing practical experience working as a team member. 1) 2) 3) 4)
The objective of HAUSat-2 is to demonstrate a new platform for Korea's first spaceborne star tracker and a GPS receiver. New technologies for ultra-small satellites, such as plug-and-play type BEU (Bus Electronics Unit), attitude control method, and energy balance analysis of body-mounted solar panels, are being implemented on HAUSat-2.
Parameter | Value | Comment |
SSO (Sun-synchronous Orbit) | 650 km, 98º inclination | LEO |
Spacecraft mass, power | ≤ 25 kg, > 20 W (@ EOL) |
|
Attitude control accuracy | Pitch: < ±1º | GPS receiver and star tracker qualification |
Payload | - Animal Tracking System (ATS) |
|
RF communications | UHF, downlink data rate = 9.6 kbit/s | FSK modulation |
Mission design life | 2 years | Operation mission of 1 year |
Spacecraft
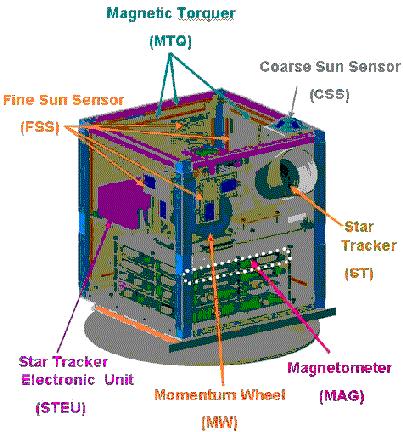
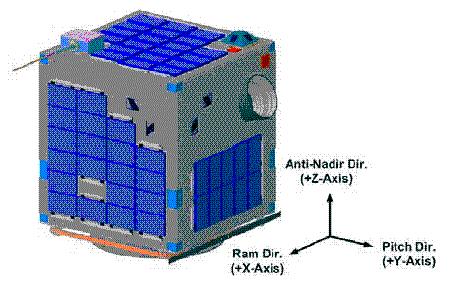
HAUSat-2 is a microsatellite, having a mass of 25 kg with a hexahedron configuration of size: 32 cm x 32 cm x 40 cm. The spacecraft is 3-axis stabilized using bias momentum method in the pitch axis. The ADCS (Attitude Determination and Control Subsystem) consists of CSS (Coarse Sun Sensor), FSS (Fine Sun Sensor), MAG (Magnetometer), and 2 ST (Star Tracker) to measure attitude. Actuation is provided by 3 MTQs (Magnetic Torquer) and a MW (Momentum Wheel). The instrument information is transmitted to the C&DH (Command & Data Handling) subsystem where the attitude data is processed, and then the command is sent to the actuators. 5)
Item | Mass | Power | Performance | No of units |
CSS | 48 gram | 0.1 W | ±0.115º | 1 |
FSS | 87.5 g | 0.1 W | ±0.35º | 4 |
MAG | 40 g | 0.2 W | ±30 nT | 2 |
ST (Star Tracker) | 1.2 kg | 6.5 W | 10 arcsec | 1 |
MTQ | 225 g | 1 W/unit | 2 Am2 | 3 |
MW | 1.625 kg | 1 W | 0-4 Nms | 1 |
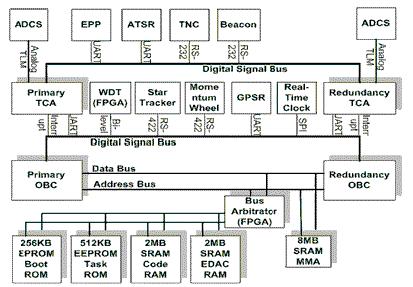
The C&DH (Figure 2) consists of the OBC, TCA (Telemetry and Command Assembly) and MMA (Mass Memory Assembly). The OBC uses a 32-bit microprocessor (MPC860T) to provide the task of system schedule planning and management, memory management, attitude control, and management of the star tracker, momentum wheels, and GPS receiver serial communication. The TCA uses P89C51 8-bit microcontroller and takes 32 channel remote analog data, and controls power. MMA stores collected telemetry and satellite housekeeping data and controls SRAM memories. An optimized system has been implemented using FPGA (Field Programmable Gate Array) that reduces the amount of wiring and saves volume.
The EPS (Electric Power Subsystem) consists of 5 surface-mounted solar panels using triple junction GaAs solar cells, and 2 Li-ion battery packs. The power produced (20 W) is controlled digitally by the peak power tracker, and then converted to 5 V, 12 V, and 28 V to be delivered to each subsystem.
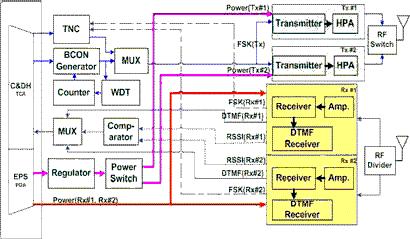
RF communications: The subsystem consists of a transceiver, a TNC (Terminal Node Controller) that processes AX.25 packets during the data communication, and CIC that controls the communication subsystem. The uplink uses 145.84 MHz VHF, and the downlink uses the UHF band (437.465 MHz). FSK modulation is employed, and a continuous beacon has been implemented to give the satellite position and health data.
The flight software supports MPC860T, which is 32-bit processor OBC of C&DH, and also supports multitasking. Real-time processing capable RTOS VxWorks will be the main OS for the system.
Launch: A shared launch of HAUSat-2 is planned for 2008/9.
Orbit: Nominal sun-synchronous orbit, altitude of 650 km, inclination of 98º.
Sensor Complement
ATS (Animal Tracking System)
ATS consists of the onboard ATSR (Animal Tracking System Receiver) device and the ATT (Animal Tracking Terminal), attached to the animals, and the ground station that processes the data and distributes the result to the users. The ATSR can receive VHF band ( 145.860 MHz) FSK signal, and can reliably perform its mission for the mission life of 1 year. The objective of ATS is to provide the target animal's position/migration data to the interested parties such as ecological research organizations.
Two types of ATT are being developed. The first type is GPS-In ATT where the terminal is equipped with a GPS receiver. The second type is GPS-Ex ATT where the sensor data from the transmitter is sent to HAUSat-2 during a set time period. Because the ATTs are carried by target animals, there are many limitations on the transmitter mass.
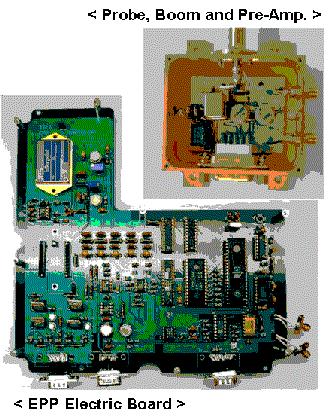
EPP (Electric Plasma Probe)
The objective is to measure electron density and temperature in the upper atmosphere. The main development effort of the probe is being led by KAIST (Korea Advanced Institute of Science and Technology), with student participation of the Busan Science Talent School.
The EPP device has a mass of 1.1 kg, and a power consumption of 4 W. The components include the probe that measures the electron density (as analog signal), and the electronics board that converts the data to digital values, then transmits them to the onboard computer.
ST (Star Tracker)
The star tracker is a demonstration device of SaTReCi (SaTReC Initiative), Daejeon, Korea. The star tracker has a FOV (Field of View) of ~15º and a pointing accuracy of 10 arcsec.
GPSR (GPS Receiver)
A GPS receiver is flown for demonstration purposes. Its size is 120 mm x 70 mm x 21 mm. The GPSR can maintain lock in a high maneuver environment; velocity of up to 10,000 m/s and accelerations up to 20 g.
TIDM (Total Ionizing Dose Meter)
The TIDM uses a RADFET (Radiation-sensitive Field Effect Transistor) of the NMRC laboratory. The TIDM device measures the total radiation dose internal to the satellite. The data will be used to verify simulation results. In addition, the measured continuous dosage data will be used in an analysis of the relationship between the sun's activity and the total dose. The RADFET module has size of 46 mm x 27 mm x 18.5 mm and and a mass of 30 g. - The TIDM device, attached to the top of BEU (Bus Electronics Unit), will have a 2 mm AL shielding to closely compare/simulate the internal BEU environment.
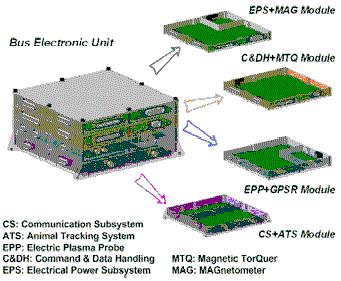
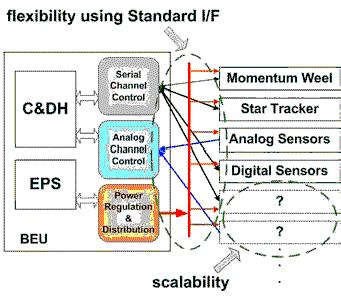
Plug-and-Play Type BEU
The spacecraft incorporates a Plug-and-Play type BEU (Bus Electronic Unit) that combines all subsystem and payload electronics into one electronics box. It includes electronics for communication, electric power, attitude control, and C&DH subsystems.
References
1) Y.-K. Chang, B.-Y. Moon, B.-H. Lee, S.-J. Kang, "Development of low-cost HAUSat-2 nanosatellite as an educational tool and a technology testbed," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
2) J.-W. Jung, Y.-K. Chang, "HAUSAT-2 Satellite Radiation Environment Analysis and Software Hamming Code EDAC Implementation," Journal of Astronomy and Space Sciences, Vol. 22, No. 4, Dec. 2005, pp. 537-558
3) Y.-K. Chang, S.-J. Kang, B.-Y. Moon, B.-H. Lee, "Low-cost responsive exploitation of space by HAUSat-2 nanosatellite," 4th Responsive Space Conference, April 24-27, 2006, paper: AIAA-RS4 2006-3003
4) Y.-K. Chang, B.-Y. Moon, K.-L. Hwang, S.-J. Kim , S.-J. Kang, "Development of the HAUSAT-2 Nanosatellite for Low-Cost Technology Demonstration," Proceedings of RAST (Recent Advances in Space Technologies) 2005, June 9-11, 2005, Istanbul, Turkey
5) Y.-K. Chang, B.-H. Lee, S.-J. Kim, "Analysis of the HAUSat-2 Attitude Control with a Pitch Bias Momentum Control," 5th IAA Symposium, Berlin, Germany, April 4-8, 2005, URL: http://www.dlr.de/iaa.symp/archive_5/pdf/1202_Young-KeunChang.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).