Hayabusa-2 (Japan's Second Asteroid Sample Return Mission)
Non-EO
JAXA
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | JAXA |
| Launch date | 03 Dec 2014 |
| End of life date | 05 Dec 2020 |
Hayabusa-2: Japan's Second Asteroid Sample Return Mission
Spacecraft Launch Mission Status Sensor Complement MASCOT Sample Return Capsule References
Hayabusa-2 is JAXA's (Japan Aerospace Exploration Agency) follow-on mission to the Hayabusa mission, the country's first round-trip asteroid mission that sent the Hayabusa (MUSES-C) spacecraft to retrieve samples of asteroid Itokawa. The initial Hayabusa mission launched in May 2003 and reached Itokawa in 2005; it returned samples of Itokawa — the first asteroid samples ever collected in space — in June 2010. Hayabusa means 'falcon' in Japanese. 1) 2) 3) 4)
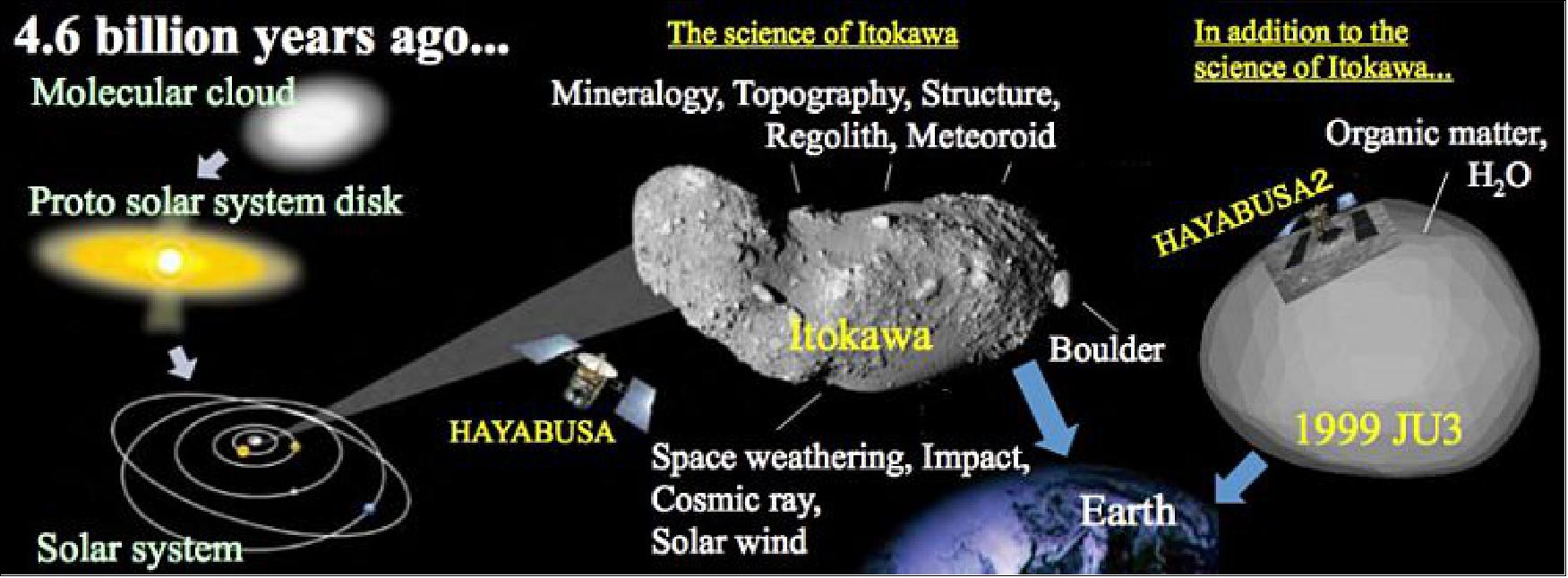
The objective of the Hayabusa-2 sample return mission is to visit and explore the C-type asteroid 1999 JU3, a space body of about 920 m in length and of particular interest to researchers, because it consists of 4.5 billion-year-old material that has been altered very little. Measurements taken from Earth suggest that the asteroid’s rock may have come into contact with water. The carbonaceous or C-type asteroid is expected to contain organic and hydrated minerals, making it different from Itokawa, which was a rocky S-type (stony composition) asteroid.
Background
Primitive bodies are celestial bodies which contain information of the birth or the following evolution of our solar system. In larger bodies such as the Earth, the pristine materials inside were once melted and we cannot access older information. On the other hand, hundreds of thousands of asteroids and comets discovered ever, though they are very small, retain memories of when and where they were formed in the solar system. Exploration of such primitive bodies will provide us an essential clue for how our solar system was formed and has grown, and how the primary organic materials of life on the Earth were composed and evolved, which will be important knowledge also in investigating formation and evolution of exoplanets.
Among primitive bodies, asteroids can be classified into several groups according to the spectroscopic observation by telescopes. Inside the asteroid belt between the Mars and Jupiter, it is known that distribution of each group varies according to the distance from the Sun.
In the region close to the Sun, we can observe many 'S-type asteroids' whose primary component is expected to be stony. These will give us hints about components of stony planets such as the Earth and Mars. S-type asteroids have been expected to be the birthplace of 'ordinary chondrite', the most common meteorites on the Earth. This hypothesis was extensively confirmed by exploration of S-type asteroid "Itokawa" by JAXA's asteroid probe Hayabusa.
Most commonly distributed around the midst of the asteroid belt are 'C-type asteroids' expected to contain substantial organic or hydrated minerals. This type is expected to be the birthplace of 'carbonaceous chondrite', and an important target for investigation of origin of life on earth. The Hayabusa-2 mission, following Hayabusa, is planning a sample-return from C-type asteroids.
Around the dark and cold outer edge of the belt, closer to Planet Jupiter rather than to Mars, there are many P-type or D-type asteroids, expected to be more primitive than the S- or C-type ones. Trojan groups sharing their orbits with Jupiter are repositories of D-type asteroids. Active comets abundant in volatile components, born in further space and changed its orbit relatively recently to come closer to the Sun, or "dormant comet nuclei" depleting gases or dusts and difficult to distinguish from asteroids, are also quite essential targets. Because meteorites from D-, P-type asteroids or comet nuclei have been scarcely discovered on the Earth, the surface materials and constructions of these distant bodies are entirely unknown. Materials yet to be acquired, holding the earliest information at the birth of the solar system, may be discovered. The successive mission after "Hayabusa-2" is discussed to fetch samples from such bodies.
In this respect, JAXA will conduct, not only random single missions, but programmatic and systematic mission series successively, by Hayabusa, Hayabusa-2 and post -Hayabusa-2 for sample-return from typical primitive bodies. This will allow a unified understanding of various primitive bodies, revealing of components and construction of the whole solar system, and elucidation of the mystery behind its origin and evolution. This successive sequence is directed to the more distant and more primitive bodies from the scientific view, with more sophisticated technologies.
Overview
Hayabusa →Visit to S-type Asteroid | Hayabusa-2 →Visit to C-type Asteroid |
Technological demonstrator: | 1) Science: |
Engineering: | 2) Engineering: |
Science: Origin and evolution of the solar system | 3) Exploration: |
Detailed information of asteroid 1999JU3 has been obtained by observations of ground-based telescopes. According to observation data of 2008, the diameter of 1999JU3 is estimated to be about 900 m, larger than that Itokawa, and the rotation period is around 7.6 hours. Observation of the reflected sunlight spectrum showed, that it has features of a C-type asteroid. It is rather difficult to determine the spin axis of asteroid 1999JU3 because of its rather spherical shape.
Figure 2 shows the orbit of asteroid 1999 JU3. The orbit is similar to that of Itokawa, and it is orbiting from just inside the orbit of the Earth to just outside the orbit of Mars. The inclination of the orbit is small like the one of Itokawa. Such an orbit is suitable for a small spacecraft like Hayabusa-2 to reach and return to Earth.
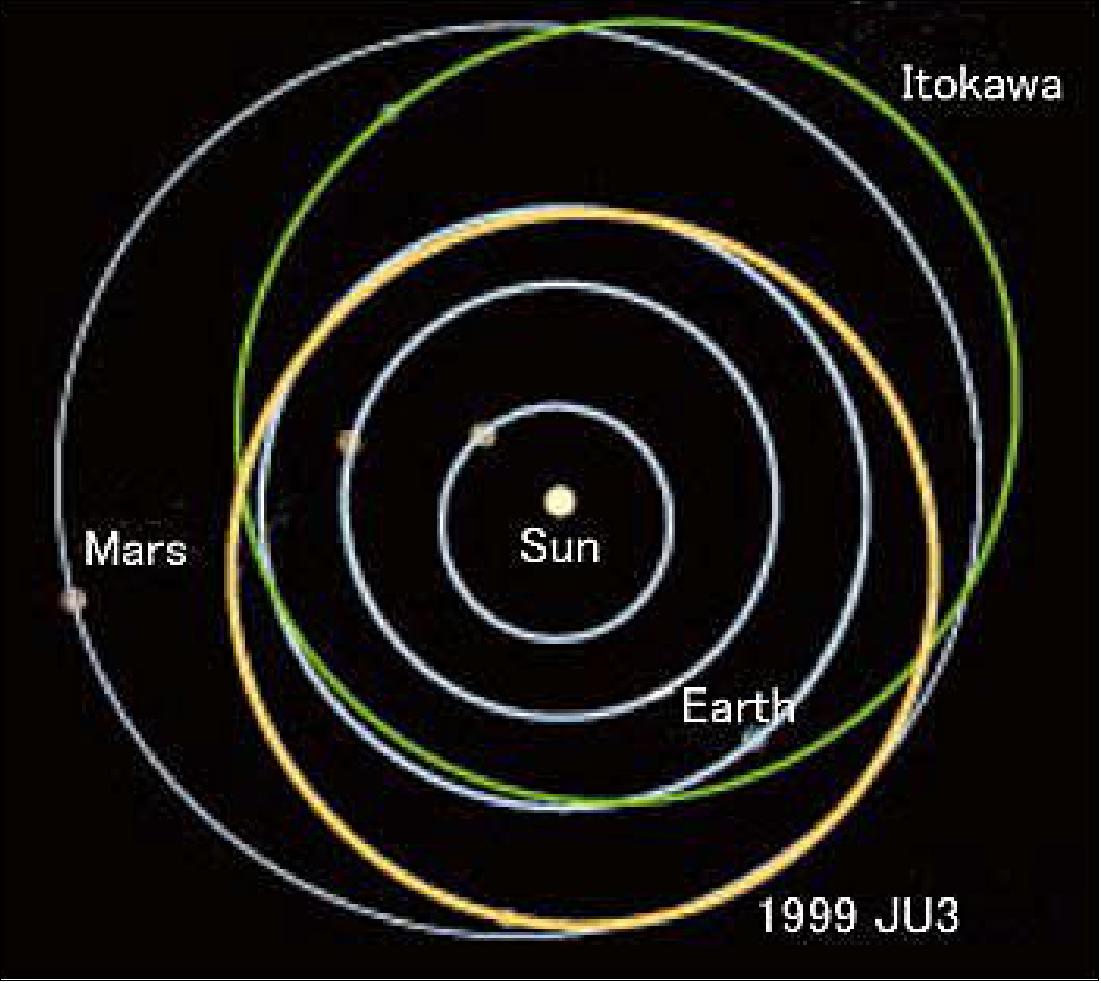
Legend to Figure 2: The blue circled lines in the figure illustrate the orbits of Mercury, Venus, Earth and Mars from inside, respectively, Itokawa's orbit is green, while the yellow orbit is that of 1999JU3.
The asteroid was discovered in 1999 by the LINEAR (Lincoln Near-Earth Asteroid Research) project, and given the provisional designation 1999JU3 (it hasn't been named so far). LINEAR is a collaboration of the United States Air Force, NASA, and MIT/LL (Massachusetts Institute of Technology /Lincoln Laboratory) for the systematic discovery and tracking of near-Earth asteroids.
Project History
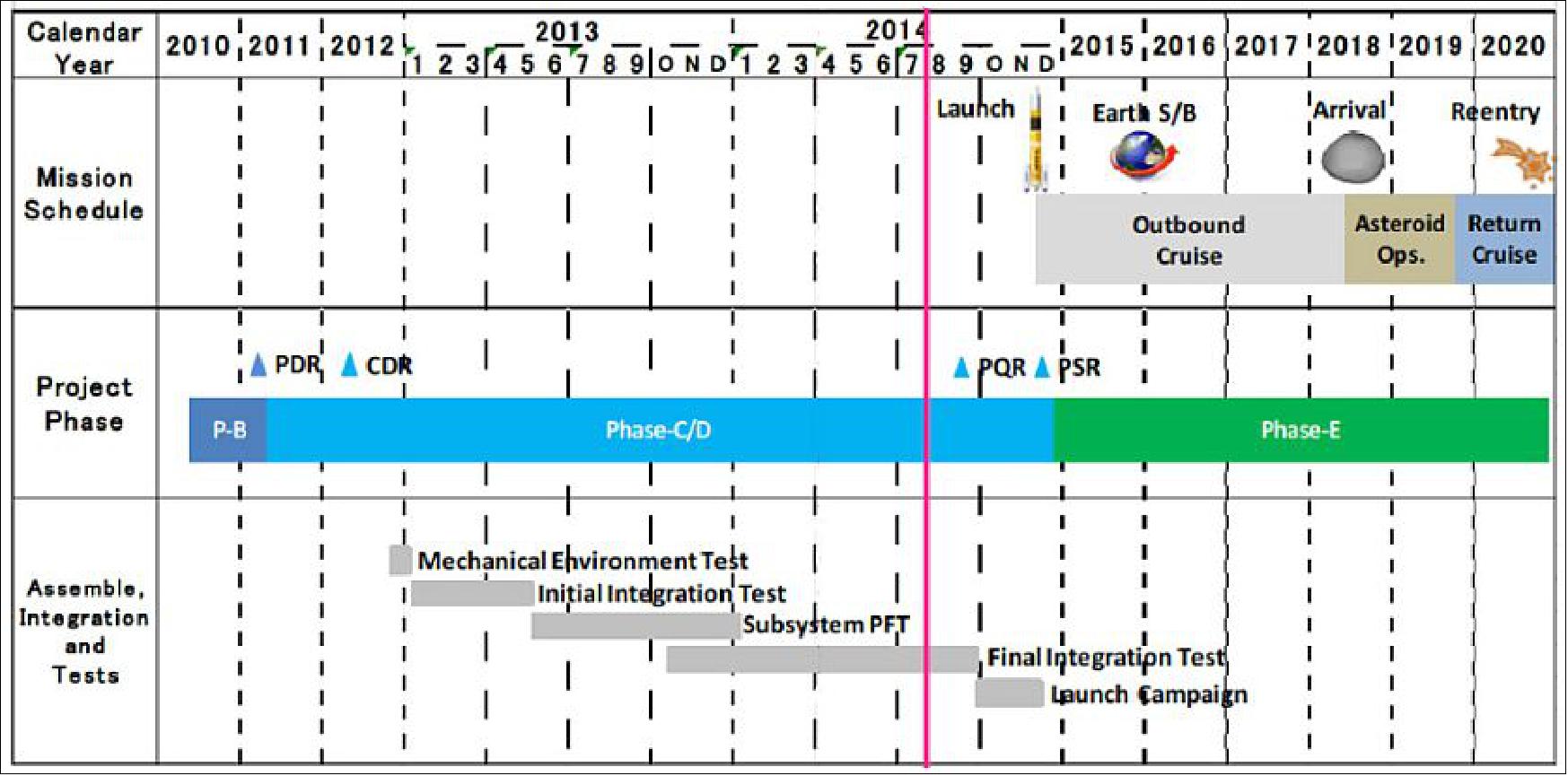
The Hayabusa-2 mission was proposed in 2006 at first. In this first proposal, the spacecraft was almost same as that of Hayabusa, because the project team wanted to start it as soon as possible. Of course, the team realized that parts had to be modified where trouble occurred in Hayabusa, but there were no major changes. The launch windows to go for launch to asteroid 1999 JU3 were in 2010 and 2011. However, JAXA could not start Hayabusa-2 mission immediately, because no budget was available. Hence, the launch opportunity was missed. The next launch window came up in 2014. Thus, the project postponed the launch date, and continued proposing Hayabusa-2. Since the launch was delayed, the project had time to change the spacecraft a little. New instruments were added, such as a Ka-band antenna and what is called “impactor.” The project even calls Hayabusa-2 a new spacecraft. 6)
In May 2011, the status of Hayabusa-2 project shifted to Phase-B, starting with the design of the spacecraft. In March 2012, the CDR (Critical Design Review) was done, and the team started manufacturing the flight model. The initial integration test started at the beginning of 2013, and the final integration test started at the end of 2013. At present (September 2014), the team has almost finished the final integration test, and the spacecraft will be shipped to the launch site soon.
International collaborations: The Hayabusa-2 mission involves international collaborations with Germany, the United States, and Australia. DLR (German Aerospace Center) and CNES (French Space Agency) are providing the small lander MASCOT. NASA was already a partner in the Hayabusa mission, a similar collaboration is under consideration for Hayabusa-2. The third collaboration is with Australia for capsule reentry as in the case of the Hayabusa mission.
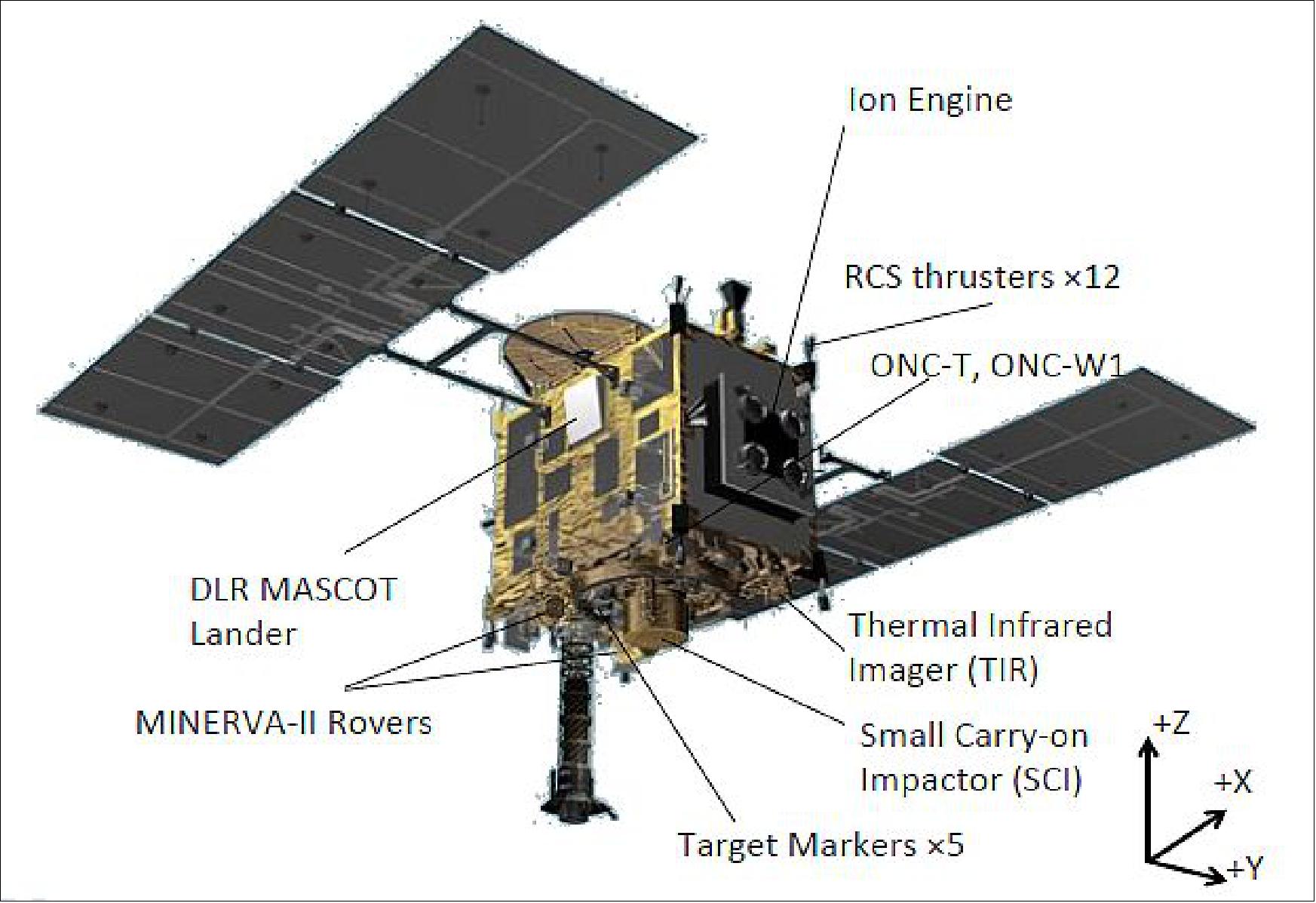
Spacecraft
Japan's Hayabusa-2 spacecraft is designed to study asteroid 1999 JU3 from multiple angles, using remote-sensing instruments, a lander and a rover. It will collect surface- and possibly also subsurface materials from the asteroid and return the samples to Earth in a capsule for analysis. The mission also aims to enhance the reliability of asteroid exploration technologies. 7) 8) 9)
In the current plan, the launch window for Hayabusa-2 is in late 2014. With this schedule, Hayabusa-2 will reach the asteroid in the middle of 2018, and return to the Earth at the end of 2020.

The Hayabusa-2 mission will utilize new technology while further confirming the deep space round-trip exploration technology by inheriting and improving the already verified knowhow established by Hayabusa to construct the basis for future deep-space exploration.
The configuration of Hayabusa-2 is basically the same as that of Hayabusa, with modifications of some parts by introducing novel technologies that evolved after the Hayabusa era. For example:
• The HGA (High Gain Antenna) for Hayabusa featured a parabolic shape, while Hayabusa-2 uses two planar HGAs with a considerably lower mass but with the same performance characteristics. The reason why Hayabusa-2 has two HGAs is that spacecraft has two communication links, Ka-band as well as the X-band links. In daily operations support, the team uses the X-band for data transmission, but for the download of the asteroid observation data, the Ka-band is used to take advantage of the higher data rate of 32 kbit/s, provided by the Ka-band link. The DDOR (Delta-Differential One-way Ranging) technique is used for very accurate plane-of-sky measurements of spacecraft position which complement existing line-of-sight ranging and Doppler measurements.
• The AOCS (Attitude and Orbit Control Subsystem) of Hayabusa-2 was improved, now featuring 4 reaction wheels for a more reliable service in case of need.
- During the cruise phase, Hayabusa-2 controls its attitude with only one reaction wheel to bias the momentum around the Z-axis of the body. This is to save the operating life of reaction wheels for other axes, because the project experienced that two reaction wheels of three equipped on Hayabusa were broken after the touchdown mission. 10)
- In this one wheel control mode, the angular momentum direction is slowly moved in the inertial space (generally called precession) due to the solar radiation torque. This attitude motion caused by the balance of the total angular momentum and solar radiation pressure is known to trace the Sun direction automatically with ellipsoidal and spiral motion around Sun direction. Based on this knowledge of the past, the attitude dynamics model for the Hayabusa-2 mission had been developed before the launch. According to the newly developed attitude dynamics model of Hayabusa-2, the precession trajectory is almost the ellipsoid around the attitude equilibrium point, and this equilibrium point is determined mainly by the phase angle around Z-axis of the body.
- In the actual operation of Hayabusa-2, the spacecraft experienced already the one wheel control mode, and the attitude motion in this mode is nearly corresponding to the expected motion based on the dynamics model developed before the launch. The precession trajectory is ellipsoid around the equilibrium point, and the attitude dynamics model is verified by the actual flight data. In this one wheel operation, the Sun aspect angle is restricted within a certain limit angle in terms of the thermal condition of the spacecraft. Because the precession radius is determined by the initial attitude and the equilibrium point, the Sun aspect angle almost exceeds the limit angle due to the precession without change of the equilibrium point. At this operation, the project executes the attitude maneuver around the Z-axis to change the equilibrium point, in order to reduce the Sun aspect angle - and succeeded. After that, the project executed the maneuver again to change the equilibrium point to a close point in order to make the small precession trajectory (Ref. 10).
• IES (Ion Engine System) has been modified to account for the aging effect during extended support periods. The thrust level of IES was increased by 25%, using the same Xe microwave discharge ion engine system.
IES will be used for orbit maneuvers during the cruising of the Hayabusa-2’s onward journey to the asteroid and return trip to Earth. The engine enables to make the round trip with only one tenth of the power consumption compared to that of chemical propellant.
Major improvements from the Hayabusa mission are:
- Countermeasures to plasma ignition malfunction of one ion source of an ion engine. Carefully coordinating each part of the ion engine to improve both ion source propulsion generation efficiency and ignition stability.
- Countermeasures to degradation and malfunction of three neutralizers that occurred after 10,000 to 15,000 hours of operation. To make the neutralizer’s lifespan longer, the walls of the electric discharge chamber are protected from plasma and the magnetic field has been strengthened to decrease the voltage necessary for electron emission.
- The maximum power was successfully increased to 10 mN per ion engine from the conventional 8 mN.
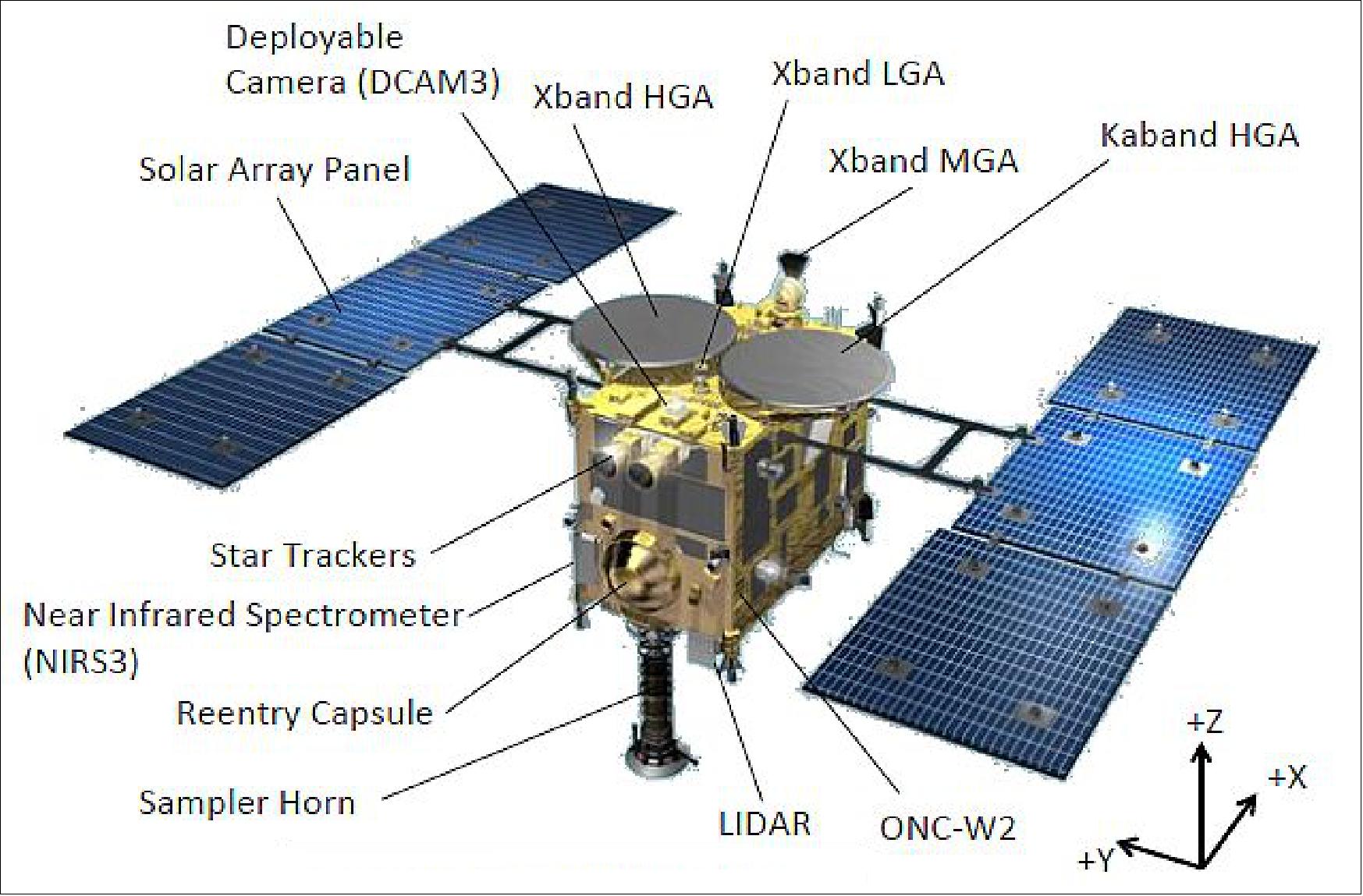
The Hayabusa-2 spacecraft has a stowed size of 1.6 m x 1 m x 1.25 m (height). With the solar panels deployed, the 600 kg satellite as a width of 6 m.
Spacecraft structure | Size: 1.6 m×1.0 m×1.4 m(height) box structure with two fixed SAPs |
Data handling subsystem | - COSMO16 based DHU-PIM bus system |
AOCS (Attitude and Orbit Control Subsystem) | - HR5000S based processor, double redundant |
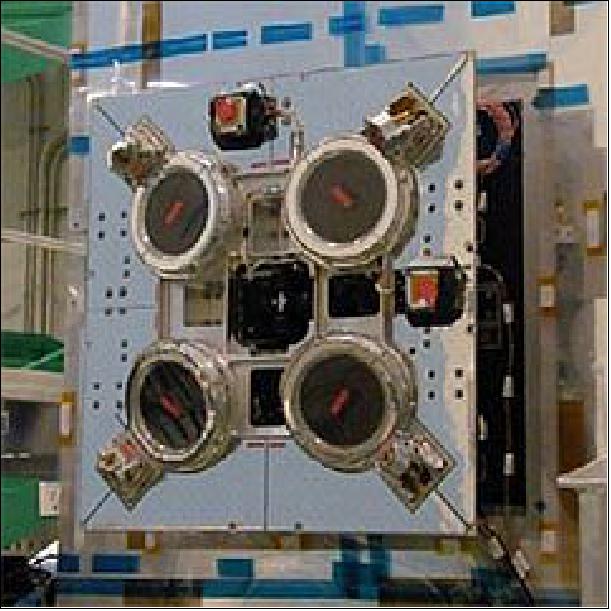
Propulsion subsystems | - RCS (Reaction Control System): Bi-propellant hydrazine system, 20 N thruster x 12 |
Power subsystem | SAP (Solar Array Paddle): -1.4 kW@1.4 AU, 2.6 kW@1AU; BAT: Li-ion battery 13.2 Ah; power bus: SSR (Series Switching Regulator) system, 50 V bus. |
Communication subsystem | - X-band TT&C (coherent X-up/X-down), data rate: 8 bit/s-32 kbit/s, double redundant. |

Launch
The Hayabusa-2 spacecraft was launched on December 03, 2014 (04:22:04 UTC) on a H-IIA vehicle (No. 26) from TNSC (Tanegashima Space Center), Japan. The launch service provider was MHI (Mitsubishi Heavy Industries, Ltd). The launch was nominally and about 1 hr 47 minutes and 21 seconds after liftoff, the separation of the Hayabusa-2 spacecraft into an Earth-escape trajectory was confirmed. 11) 12)
Secondary payloads:
• Shin'en-2, a nanosatellite technology demonstration mission (17 kg) of Kyushu Institute of Technology and Kagoshima University, Japan. The objective is to establish communication technologies with a long range as far as moon. Shin'en-2 carries into deep space an F1D digital store-and-forward transponder which offers an opportunity for earthbound radio amateurs to test the limits of their communication capabilities.
• ArtSat-2 (Art Satellite-2)/DESPATCH (Deep Space Amateur Troubadour’s Challenge), a joint project of of Tama Art University and Tokyo University. DESPATCH is a microsatellite of ~30 kg. The microsatellite carries a “deep space sculpture” developed using a 3D printer, as well as an amateur radio payload and a CW beacon at 437.325 MHz.
• PROCYON (PRoximate Object Close flYby with Optical Navigation) is a microsatellite (67 kg) developed by the ISSL (Intelligent Space Systems Laboratory) of the University of Tokyo and JAXA. The objective is to demonstrate microsatellite bus technology for deep space exploration and proximity flyby to asteroids performing optical measurements. 13)
Orbit: The trajectory of Hayabusa-2 for the whole mission is shown in the sun-earth fixed coordinate in Figure 9. The total cruising time is about 4.5 years, and the asteroid proximity period is about 1.5 years. So the total flight time is about 6 years. The departure C3 is 21 km2/s2, the total impulse of the ion engine is 2 km/s, and the reentry speed of the capsule is 11.6 km/s.
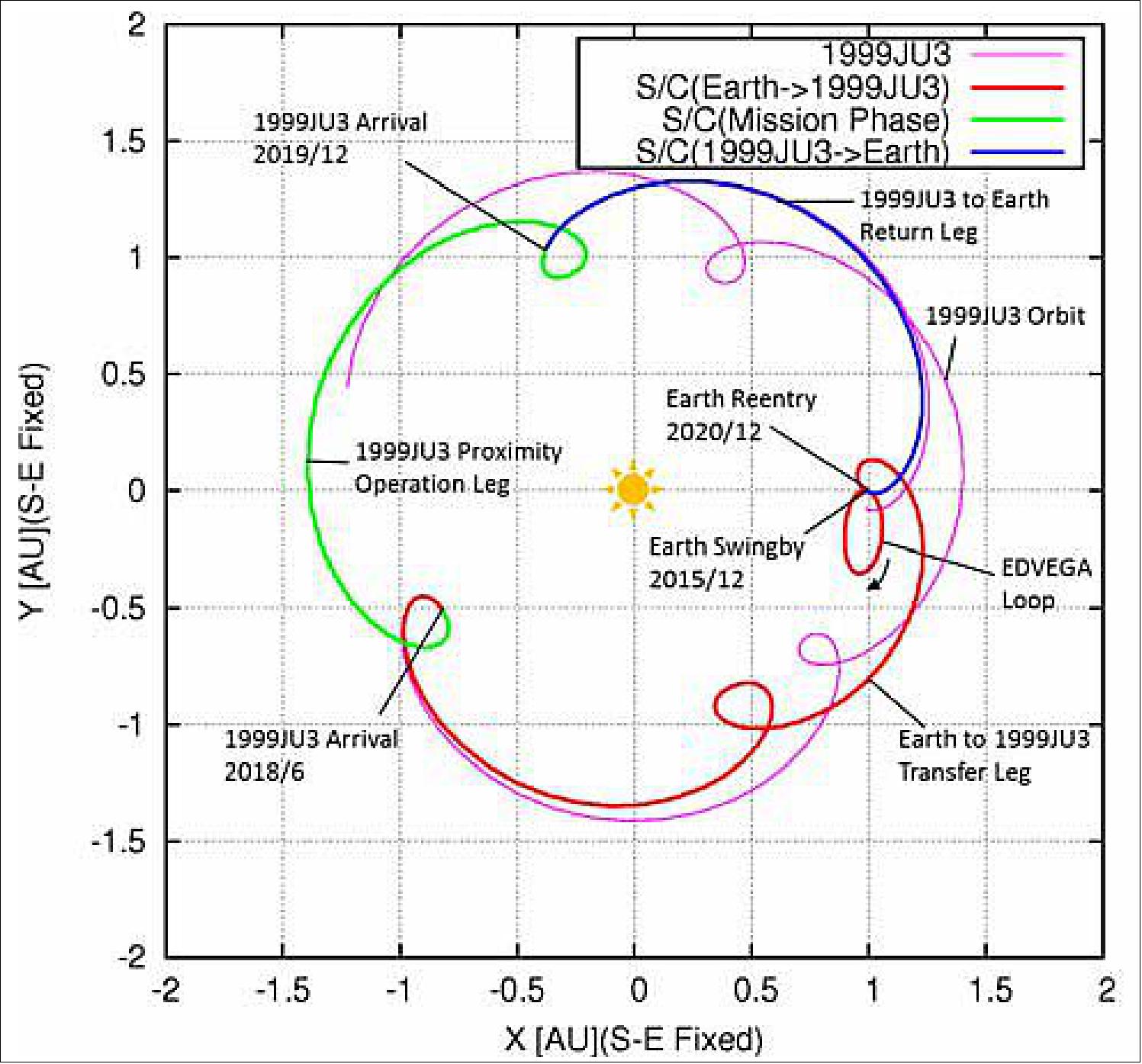
Legend to Figure 9: Hayabusa-2 is equipped with a high-specific impulse ion engine system to enable the round-trip mission. First one year after launch is an interplanetary cruise phase called EDVEGA (Electric Delta-V Earth Gravity Assist).
Mission Status
• March 18, 2022: Asteroids hold many clues about the formation and evolution of planets and their satellites. Understanding their history can, therefore, reveal much about our solar system. While observations made from a distance using electromagnetic waves and telescopes are useful, analyzing samples retrieved from asteroids can yield much more detail about their characteristics and how they may have formed. An endeavor in this direction was the Hayabusa mission, which, in 2010, returned to Earth after 7 years with samples from the asteroid Itokawa. 14)
- The successor to this mission, called Hayabusa-2, was completed near the end of 2020, bringing back material from Asteroid 162173 “Ryugu,” along with a collection of images and data gathered remotely from close proximity. While the material samples are still being analyzed, the information obtained remotely has revealed three important features about Ryugu. Firstly, Ryugu is a rubble-pile asteroid composed of small pieces of rock and solid material clumped together by gravity rather than a single, monolithic boulder. Secondly, Ryugu is shaped like a spinning top, likely caused by deformation induced by quick rotation. Third, Ryugu has a remarkably high organic matter content.
- Of these, the third feature raises a question regarding the origin of this asteroid. The current scientific consensus is that Ryugu originated from the debris left by the collision of two larger asteroids. However, this cannot be true if the asteroid is high in organic content (which will confirmed once the analyses of the returned samples are complete). What could, then, be the true origin of Ryugu?
- In a recent effort to answer this question, a research team led by Associate Professor Hitoshi Miura of Nagoya City University, Japan, proposed an alternative explanation backed up by a relatively simple physical model. As explained in their paper published in The Astrophysical Journal Letters, the researchers suggest that Ryugu, as well as similar rubble-pile asteroids, could, in fact, be remnants of extinct comets. This study was carried out in collaboration with Professor Eizo Nakamura and Associate Professor Tak Kunihiro from Okayama University, Japan. 15)
- Comets are small bodies that form on the outer, colder regions of the solar system. They are mainly composed of water ice, with some rocky components (debris) mixed in. If a comet enters the inner solar system— the space delimited by the asteroid belt “before” Jupiter—heat from the solar radiation causes the ice to sublimate and escape, leaving behind rocky debris that compacts due to gravity and forms a rubble-pile asteroid.
- This process fits all the observed features of Ryugu, as Dr. Miura explains, “Ice sublimation causes the nucleus of the comet to lose mass and shrink, which increases its speed of rotation. As a result of this spin-up, the cometary nucleus may acquire the rotational speed required for the formation of a spinning-top shape. Additionally, the icy components of comets are thought to contain organic matter generated in the interstellar medium. These organic materials would be deposited on the rocky debris left behind as the ice sublimates.”
- Overall, this study indicates that spinning top-shaped, rubble-pile objects with high organic content, such as Ryugu and Bennu (the target of the OSIRIS-Rex mission) are comet–asteroid transition objects (CATs). “CATs are small objects that were once active comets but have become extinct and apparently indistinguishable from asteroids,” explains Dr. Miura. “Due to their similarities with both comets and asteroids, CATs could provide new insights into our solar system.”
- Hopefully, detailed compositional analyses of the samples from both Ryugu and Bennu will shed more light on these issues. Make sure to stay tuned!
• January 5, 2021: Last month, Japan’s Hayabusa-2 mission brought home a cache of rocks collected from a near-Earth asteroid called Ryugu. While analysis of those returned samples is just getting underway, researchers are using data from the spacecraft’s other instruments to reveal new details about the asteroid’s past. 16)
- In a study published in Nature Astronomy, 17) researchers offer an explanation for why Ryugu isn’t quite as rich in water-bearing minerals as some other asteroids. The study suggests that the ancient parent body from which Ryugu was formed had likely dried out in some kind of heating event before Ryugu came into being, which left Ryugu itself drier than expected.
- “One of the things we’re trying to understand is the distribution of water in the early solar system, and how that water may have been delivered to Earth,” said Ralph Milliken, a planetary scientist at Brown University and study co-author. “Water-bearing asteroids are thought to have played a role in that, so by studying Ryugu up close and returning samples from it, we can better understand the abundance and history of water-bearing minerals on these kinds of asteroids.”
- One of the reasons Ryugu was chosen as a destination, Milliken says, is that it belongs to a class of asteroids that are dark in color and suspected to have water-bearing minerals and organic compounds. These types of asteroids are believed to be possible parent bodies for dark, water- and carbon-bearing meteorites found on Earth known as carbonaceous chondrites. Those meteorites have been studied in great detail in laboratories around the world for many decades, but it is not possible to determine with certainty which asteroid a given carbonaceous chondrite meteorite may come from.
- The Hayabusa-2 mission represents the first time a sample from one of these intriguing asteroids has been directly collected and returned to Earth. But observations of Ryugu made by Hayabusa-2 as it flew alongside the asteroid suggest it may not to be as water-rich as scientists originally expected. There are several competing ideas for how and when Ryugu may have lost some of its water.
- Ryugu is a rubble pile — a loose conglomeration of rock held together by gravity. Scientists think these asteroids likely form from debris left over when larger and more solid asteroids are broken apart by a large impact event. So it’s possible the water signature seen on Ryugu today is all that remains of a previously more water-rich parent asteroid that dried out due a heating event of some kind. But it could also be that Ryugu dried out after a catastrophic disruption and re-formation as a rubble pile. It’s also possible that Ryugu had a few close spins past the sun in its past, which could have heated it up and dried out its surface.
- The Hayabusa-2 spacecraft had equipment aboard that could help scientists to determine which scenario was more likely. During its rendezvous with Ryugu in 2019, Hayabusa-2 fired a small projectile into the asteroid’s surface. The impact created a small crater and exposed rock buried in the subsurface. Using a near-infrared spectrometer, which is capable of detecting water-bearing minerals, the researchers could then compare the water content of surface rock with that of the subsurface.
- The data showed the subsurface water signature to be quite similar to that of the outermost surface. That finding is consistent with the idea that Ryugu’s parent body had dried out, rather than the scenario in which Ryugu’s surface was dried out by the sun.
- “You’d expect high-temperature heating from the sun to happen mostly at the surface and not penetrate too far into the subsurface,” Milliken said. “But what we see is that the surface and subsurface are pretty similar and both are relatively poor in water, which brings us back to the idea that it was Ryugu’s parent body that had been altered.”
- More work needs to be done, however, to confirm the finding, the researchers say. For example, the size of the particles excavated from the subsurface could influence the interpretation of the spectrometer measurements.
- “The excavated material may have had a smaller grain size than what’s on the surface,” said Takahiro Hiroi, a senior research associate at Brown and study co-author. “That grain size effect could make it appear darker and redder than its coarser counterpart on the surface. It’s hard to rule out that grain-size effect with remote sensing.”
- Luckily, the mission isn’t limited to studying samples remotely. Since Hayabusa2 successfully returned samples to Earth in December, scientists are about to get a much closer look at Ryugu. Some of those samples may soon be coming to the NASA Reflectance Experiment Laboratory (RELAB) at Brown, which is operated by Hiroi and Milliken.
- Milliken and Hiroi say they’re looking forward to seeing if the laboratory analyses corroborate the team’s remote sensing results.
- “It’s the double-edged sword of sample return,” Milliken said. “All of those hypotheses we make using remote sensing data will be tested in the lab. It’s super-exciting, but perhaps also a little nerve-wracking. One thing is for certain, we’re sure to learn a lot more about the links between meteorites and their parent asteroids.”
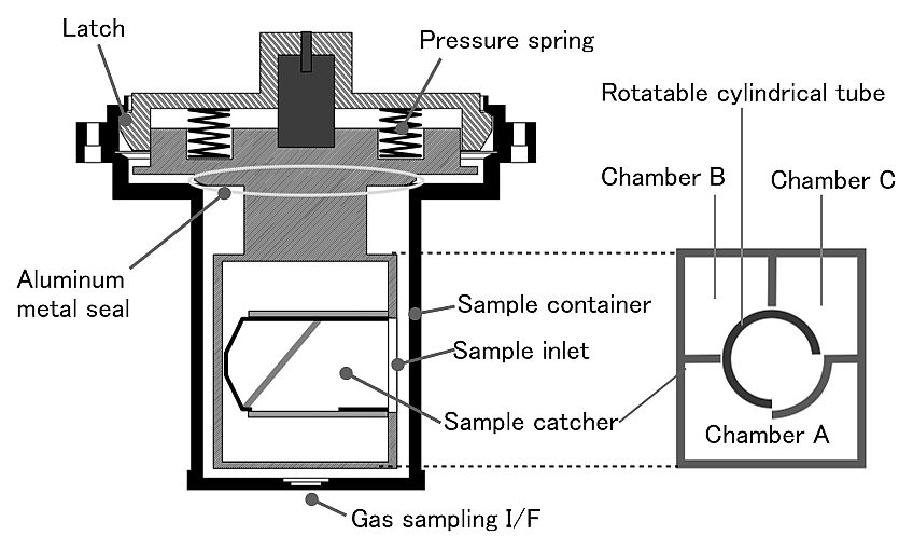
• December 15, 2020: JAXA has confirmed that the gas collected from the sample container inside the reentry capsule of the asteroid explorer, Hayabusa-2, is a gas sample originating from asteroid Ryugu. 18)
- The result of the mass spectrometry of the collected gas within the sample container performed at the QLF (Quick Look Facility) established at the Woomera Local Headquarters in Australia on December 7, 2020, suggested that the gas differed from the atmospheric composition of the Earth. For additional confirmation, a similar analysis was performed on December 10 – 11 at the Extraterrestrial Sample Curation Center on the JAXA Sagamihara Campus. This has led to the conclusion that the gas in the sample container is derived from asteroid Ryugu.
The grounds for making this decision are due to the following three points:
a) Gas analysis at the Extraterrestrial Sample Curation Center and at the Woomera Local Headquarters in Australia gave the same result.
b) The sample container is sealed with an aluminum metal seal and the condition of the container is as designed, such that the inclusion of the Earth’s atmosphere was kept well below the permissible level during the mission.
c) Since it was confirmed on the Sagamihara campus that gas of the same composition had been generated even after the removal of the container gas in Australia, it is considered that the collected gas must be due to the degassing from the sample.
- This is the world’s first sample return of a material in the gas state from deep space.
- The initial analysis team will continue with opening the sample container and performing a detailed analysis of the molecular and isotopic composition of the collected gas.
• On December 6, 2020 local time (Dec. 5 in the United States), the Japanese spacecraft Hayabusa-2 dropped a capsule to the ground of the Australian Outback from about 120 miles (or 200 km) above Earth’s surface. Inside that capsule is some of the most precious cargo in the solar system: dust that the spacecraft collected earlier this year from the surface of asteroid Ryugu. 19)
- By the close of 2021, JAXA (Japan Aerospace Exploration Agency) will disperse samples of Ryugu to six teams of scientists around the globe. These researchers will prod, heat, and inspect these ancient grains to learn more about their origins.
- Among the teams of Ryugu investigators will be scientists from the Astrobiology Analytical Laboratory at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. Researchers in the astrobiology lab use cutting-edge instruments that are similar to those used in forensic labs to solve crimes. Instead of solving crimes, though, NASA Goddard scientists probe space rocks for molecular evidence that can help them piece together the history of the early solar system.
- “What we’re trying to do is better understand how Earth evolved into what it is today,” said Jason P. Dworkin, director of the Goddard’s Astrobiology Analytical Laboratory. “How, from a disk of gas and dust that coalesced around our forming Sun, did we get to life on Earth and possibly elsewhere?” Dworkin serves as the international deputy of a global team that will probe a sample of Ryugu in search of organic compounds that are precursors to life on Earth.
- Ryugu is an ancient fragment of a larger asteroid that formed in the cloud of gas and dust that spawned our solar system. It is an intriguing type of asteroid that’s rich in carbon, which is an element essential to life.
- When Dworkin and his team receive their share of a Ryugu sample next summer, they will look for organic compounds, or carbon-based compounds, in order to better understand how these compounds first formed and spread throughout the solar system.
- Organic compounds of interest to astrobiologists include amino acids, which are molecules that make up the hundreds of thousands of proteins responsible for powering some of life’s most essential functions, such as making new DNA. By studying the differences in the types and amounts of amino acids preserved in space rocks scientists can build a record of how these molecules formed.
- Dust from Ryugu, which is currently 9 million miles, or 15 million km, from Earth, will be among the most immaculately preserved space material scientists have laid hands on. It’s only the second sample of an asteroid that has ever been collected in space and returned to Earth.
- Before the Ryugu delivery, JAXA brought back tiny samples of asteroid Itokawa in 2010 as part of the first asteroid sampling mission in history. Prior to that, in 2006, NASA obtained a small sample from comet Wild-2 as part of its Stardust mission. And next, in 2023, NASA’s OSIRIS-REx will return at least a dozen ounces, or hundreds of grams, of the asteroid Bennu, which has been traveling through space and largely unaltered for billions of years.
- “Our final objective is to understand how organic compounds formed in the extraterrestrial environment,” said Hiroshi Naraoka, professor of geochemistry at Kyushu University in Fukuoka, Japan, and the lead of the global Hayabusa-2 team that will analyze Ryugu’s organic composition. “So we want to analyze many organic compounds, including amino acids, sulfur compounds, and nitrogen compounds, to build a story of the types of organic synthesis that happens in asteroids.”
- After analyzing the makeup of Ryugu, scientists will get to compare it to Bennu, the site of a wildly successful sample grab by OSIRIS-REx, which briefly touched down on the asteroid’s surface on Oct. 20.
- “The two asteroids have similar shapes, but Bennu appears to have a lot more evidence of past water and of organic compounds,” said Dworkin, whose lab also is due to receive a tenth of an ounce, or several grams, of Bennu. “It’ll be very interesting to see how they compare, given they came from different parent bodies in the asteroid belt and have different histories.”
Analyzing Asteroid Particles
- Analyzing Ryugu dust will be one of the most demanding projects Goddard astrochemists have tackled. They will have to work with a miniscule amount of sample. Hayabusa-2 is expected to have collected no more than a few grams of dust (that’s about six coffee beans!) from Ryugu, although this is much more material than was returned from Itokawa. This tiny amount will be dispersed among many scientists, which means Dworkin and his colleagues will get only a fraction of the original sample — slightly more than a typical snowflake.
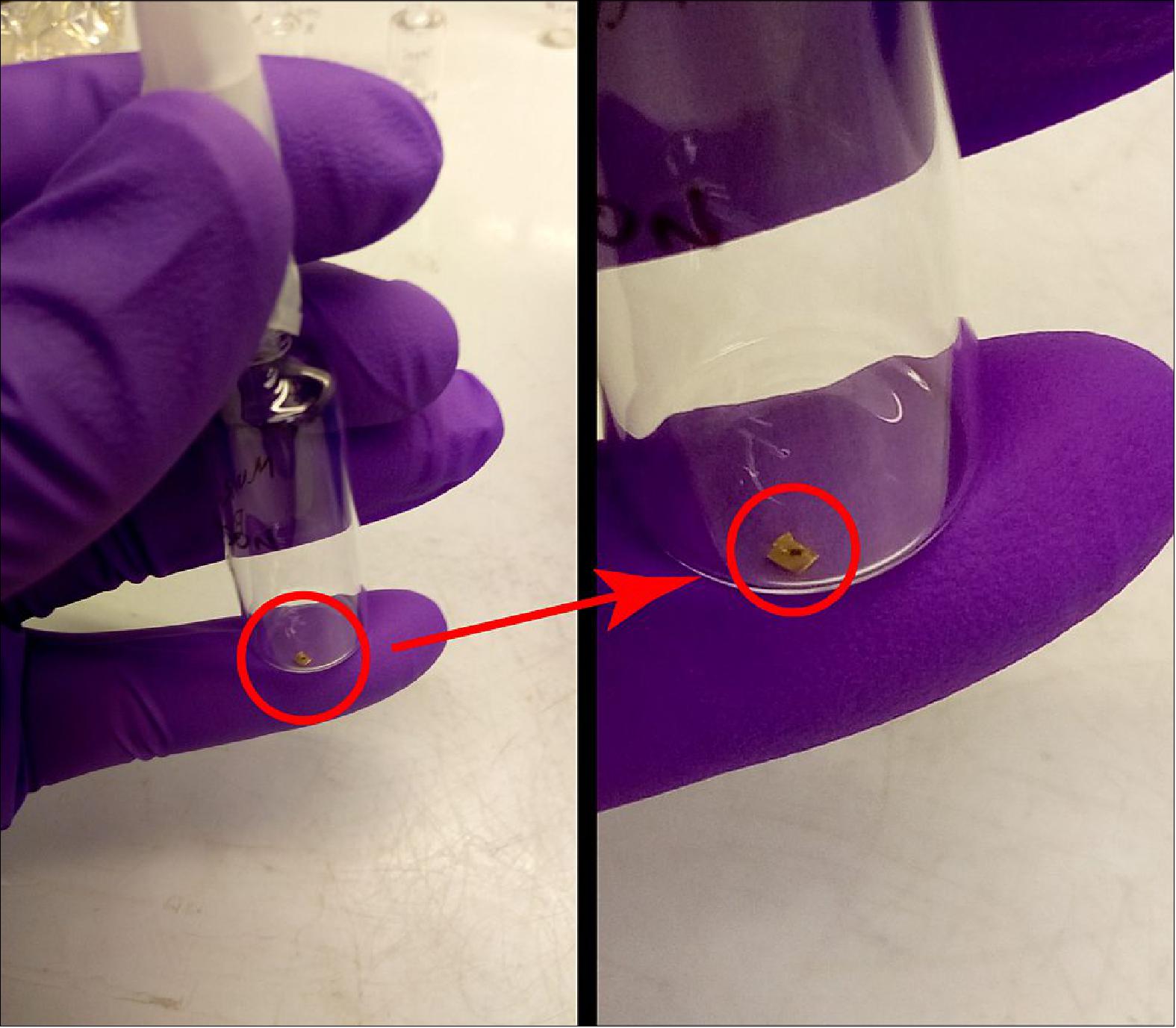
- “We’ll be dealing with much smaller sample allotments than we typically work with when we analyze meteorites,” said Eric T. Parker, a Goddard astrochemist who works with Dworkin.
- Parker said that the Goddard team, in collaboration with international colleagues, has been practicing working with tiny samples for more than a year. For example, they’ve analyzed dust grains from a carbon-rich meteorite called Murchison. Then, they used the identical technique to analyze a sample without any extraterrestrial material in it to make sure they could tell the difference between the two.
- After Goddard scientists receive Ryugu dust, they will suspend the particles in a water solution inside a glass tube. They will then heat the solution to the temperature of boiling water, or 212º Fahrenheit (100 º Celsius), for 24 hours in an attempt to extract any organic compounds that can dissolve in water.
- The researchers will run the solution through powerful analytical machines that will separate the molecules inside by shape and mass and identify each kind.
- “With really precious samples like Ryugu, of course you think, ‘I hope this test tube doesn’t break,’ or ‘I hope this reaction goes correctly,’” said Hannah L. McLain, a Goddard researcher on Dworkin’s Ryugu analysis team. “But at this point, we’ve fully established our technique to be sure nothing can go wrong and we are excited to analyze the real sample.”
• December 8, 2020: JAXA statement: ”We are pleased to announce that the Hayabusa-2 reentry capsule that was recovered in Woomera, Australia, arrived at the Extraterrestrial Sample Curation Center established on the JAXA Sagamihara Campus, at 11:27 (JST) on December 8, 2020.” 20)
• December 7, 2020: Officials of JAXA (Japan Aerospace Exploration Agency) hailed the arrival of rare asteroid samples on Earth after they were collected by the space probe Hayabusa-2 during an unprecedented mission. 21)

- In a streak of light across the night sky, a capsule containing the precious specimens taken from a distant asteroid arrived on Earth after being dropped off by the probe.
- "After six years of space travel, the box of treasures was able to land in Australia's Woomera this morning," Databus-2 project manager Yuichi Tsuda told a press conference.
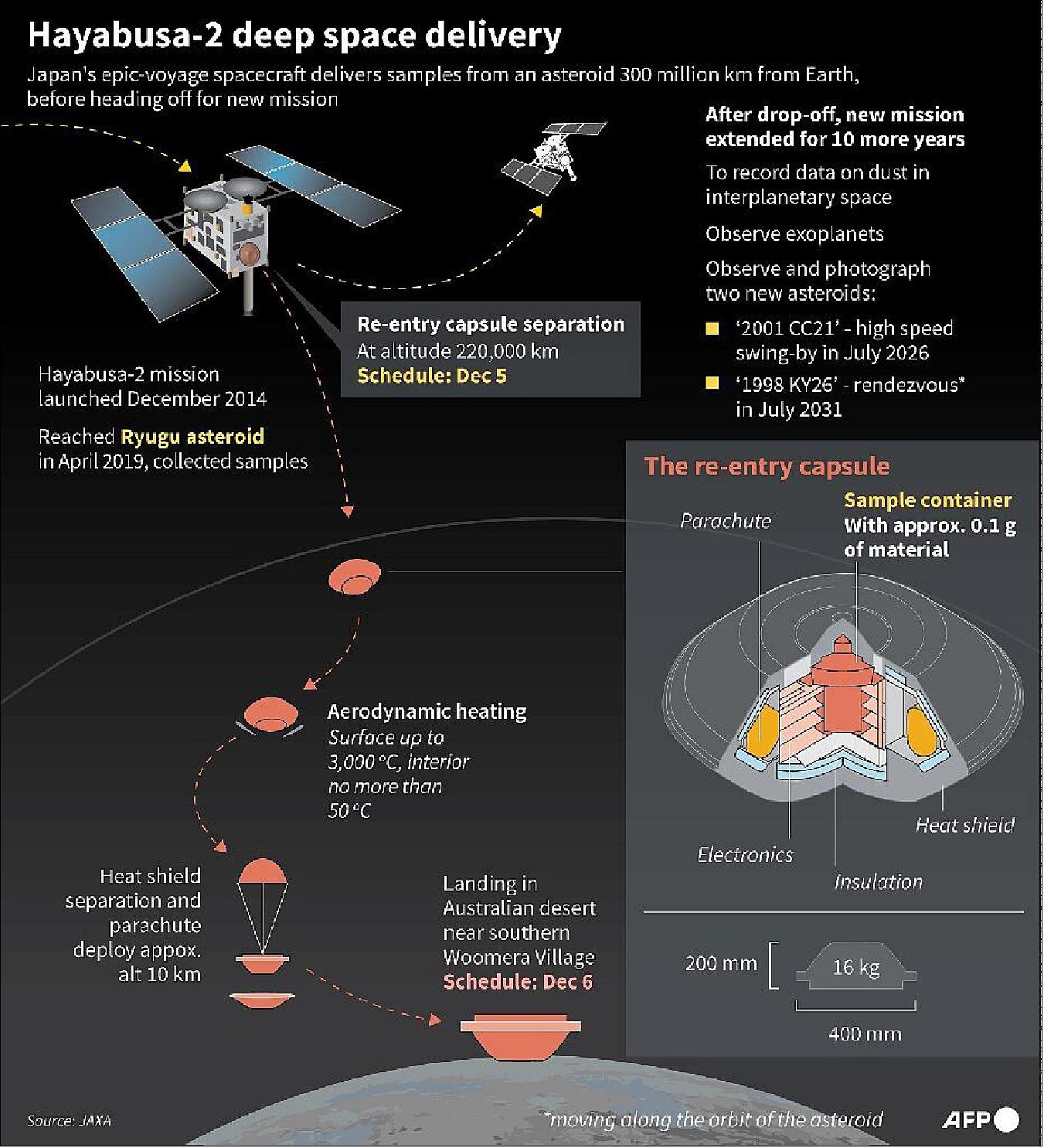
- The capsule carrying samples entered the atmosphere just before 2:30 am Japan time (17:30 GMT Saturday, 5 December), creating a shooting-star-like fireball as it entered Earth's atmosphere en route to the landing site Down Under.
- A few hours later, JAXA confirmed the samples had been recovered, with help from beacons emitted by the capsule as it plummeted to Earth after separating from Hayabusa-2 on Saturday, while the fridge-sized probe was about 220,000 km away.
- The capsule, recovered in the southern Australian desert, will now be in the hands of scientists performing initial analysis including checking for any gas emissions. — It will then be sent to Japan.
- Megan Clark, chief of the Australian Space Agency, congratulated the "wonderful achievement — 2020 has been a difficult year all around the world" but the Hayabusa-2 helped "renew our faith in the world, and our trust (in) and appreciation" of the science of the outer universe, she said.
Samples with Organic Material?
- The samples were collected by Hayabusa-2, which launched in 2014, from the asteroid Ryugu, about 300 million kilometers from Earth.
- The probe collected both surface dust and pristine material from below the surface that was stirred up by firing an "impactor" into the asteroid.

- The material is believed to be unchanged since the time the universe was formed.
- Larger celestial bodies like Earth went through radical changes including heating and solidifying, changing the composition of the materials on their surface and below.
- But "when it comes to smaller planets or smaller asteroids, these substances were not melted, and therefore it is believed that substances from 4.6 billion years ago are still there," Hayabusa-2 mission manager Makoto Yoshikawa told reporters before the capsule arrived.
- Scientists are especially keen to discover whether the samples contain organic matter, which could have helped seed life on Earth.
- "We still don't know the origin of life on Earth and through this Hayabusa-2 mission, if we are able to study and understand these organic materials from Ryugu, it could be that these organic materials were the source of life on Earth," Yoshikawa said.
- "We've never had materials like this before... water and organic matters will be subject to research, so this is a very valuable opportunity," said Motoo Ito, senior researcher at the Japan Agency for Marine-Earth Science and Technology.
- Half of Hayabusa-2's samples will be shared between JAXA, US space agency NASA and other international organizations, and the rest kept for future study as advances are made in analytic technology.
More Tasks
- The work is not over for Hayabusa-2, which will now begin an extended mission targeting two new asteroids.
- With half of the xenon fuel for its ion engine remaining, the Hayabusa-2 spacecraft is now headed back out into deep space to embark on an extended mission, using the visit to Earth to alter its orbit.
- It will complete a series of orbits around the sun for around six years before approaching the first of the asteroids—named 2001 CC21—in July 2026.
- Hayabusa-2 will then head towards its main target, 1998 KY26, a ball-shaped asteroid with a diameter of just 30 meters.
- When the probe arrives at the asteroid in July 2031, it will be approximately 300 million km from Earth.
- It will observe and photograph the asteroid, no easy task given that it is spinning rapidly, rotating on its axis about every 10 minutes.
- But Hayabusa-2 is unlikely to land and collect samples, as it probably would not have enough fuel to return them to Earth.
• On December 6, 2020, JAXA has recovered the body of the capsule, the heat shields, and the parachute of the "Hayabusa-2" reentry capsule in the Woomera Prohibited Area (WPA), Australia. 22)
- Tomorrow, the capsule recovery team will extract gas out of the capsule at the operation headquarters in Australia. Researchers considered the gas originates from the precious sample from Asteroid Ryugu.
- After the capsule separation, the spacecraft performed trajectory correction maneuvers three times every 30 minutes to depart from the Earth's sphere from 15:30 to 16:30 on December 5 (JST). The Hayabusa-2 team members confirmed the trajectory correction maneuvers' success at 16:31 on the same day (JST). The current status of the spacecraft is normal.
- We take this opportunity to show our deepest gratitude to the governments of Australia and Japan, NASA, and relevant parties for their cooperation in the recovery of the "Hayabusa-2" reentry capsule. Our appreciation extends to the people of Japan and the world for their generous support and encouragement.
• December 6, 2020: The team behind ESA’s Hera asteroid mission for planetary defence congratulates JAXA for returning Hayabusa-2’s capsule to Earth laden with pristine asteroid samples. They look forward to applying insights from this audacious space adventure to their own mission. 23)
- After 3.2 billion km of travel through space, Hayabusa-2’s reentry capsule parachuted down to Australia’s remote desert Woomera Prohibited Area on Saturday 5 December.
- Within the capsule is material gathered from the Ryugu near-Earth asteroid during two sampling operations: an initial touchdown sampling in February 2019 was followed by a second one in July that year that collected subsurface samples after blasting the face of the asteroid with an explosive impactor.
- Patrick Michel, CNRS Director of Research of France’s Côte d'Azur Observatory, serves as co-investigator and interdisciplinary scientist on the Japanese mission and as Principal Investigator on ESA’s Hera. He comments: “Hayabusa-2’s samples should give us an extraordinary opportunity to measure with high accuracy the composition and other material properties of its carbonaceous asteroid target.
- The 900-m diameter Ryugu has a spinning top shape; its density is very low and based on the results of the Small Carry-on Impactor (SCI) impact experiment performed in April 2019, its surface appears cohesionless. These findings are extremely relevant to planetary defense, which is the prime goal of the Hera mission.”
- Hera will not return any samples to Earth, but will be following Hayabusa2’s approach in one notable respect.
- When it arrives at its target Didymos asteroid system in late 2026 ESA’s desk-sized spacecraft will similarly examine subsurface material, this time excavated by a far more powerful explosive impact: NASA’s DART spacecraft will in the meantime have collided with the smaller of the two Didymos asteroids in 2022, which will attempt to shift the orbit of the asteroid in a measurable way.
- To give an idea, Hayabusa2’s SCI 2.5-kg copper projectile shot into the surface of the 900-m diameter Ryugu asteroid at a velocity of around 2 km per second. NASA’s DART will have a mass of 550 kg, and will strike Didymoon at 6 km/s.
- Patrick Michel adds: “Hayabusa-2’s impact represents a crucial first data point, in anticipation of DART’s impact, striking an asteroid five times smaller with an object more than 200 times larger while moving three times as fast, to move its orbit.”
• October 30, 2020: The artificial impactor disturbed boulders within a 30m radius from the center of the impact crater- providing important insight into asteroids’ resurfacing processes. 24)
- Professor Masahiko Arakawa (Graduate School of Science, Kobe University, Japan) and members of the Hayabusa-2 mission discovered more than 200 boulders ranging from 30 cm to 6 m in size, which either newly appeared or moved as a result of the artificial impact crater created by Japanese spacecraft Hayabusa2’s SCI (Small Carry-on Impactor) on April 5th, 2019. Some boulders were disturbed even in areas as far as 40 m from the crater center. The researchers also discovered that the seismic shaking area, in which the surface boulders were shaken and moved an order of cm by the impact, extended about 30 m from the crater center. Hayabusa2 recovered a surface sample at the north point of the SCI crater (TD2), and the thickness of ejecta deposits at this site were estimated to be between 1.0 mm to 1.8 cm using a Digital Elevation Map (DEM). These findings on a real asteroid’s resurfacing processes can be used as a benchmark for numerical simulations of small body impacts, in addition to artificial impacts in future planetary missions such as NASA’s Double Asteroid Redirection Test (DART). The results will be presented at the 52nd meeting of the AAS Division of Planetary Science on October 29th in the session entitled Asteroids: Bennu and Ryugu 2.
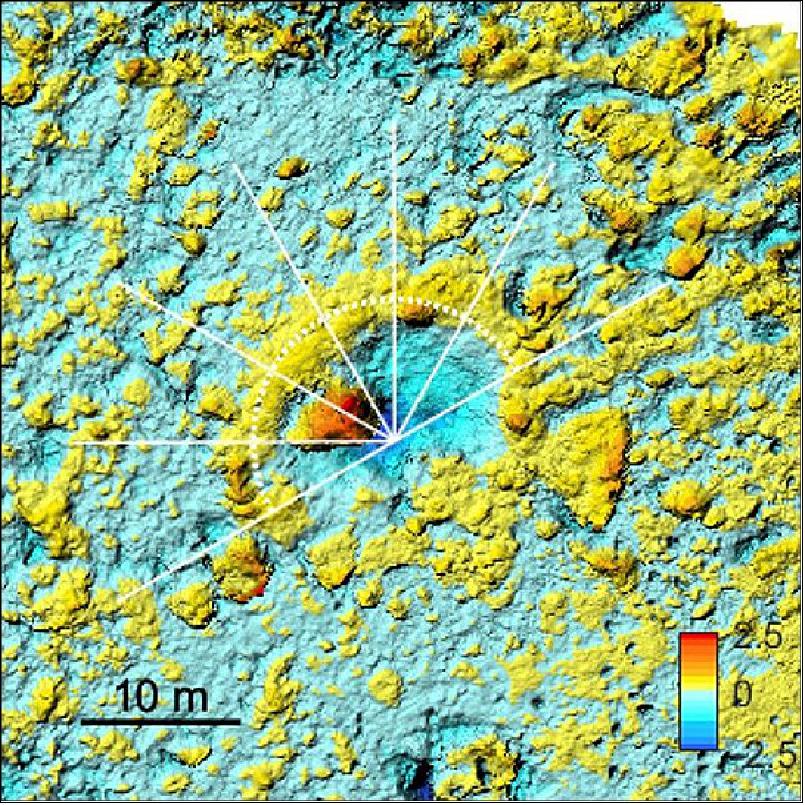
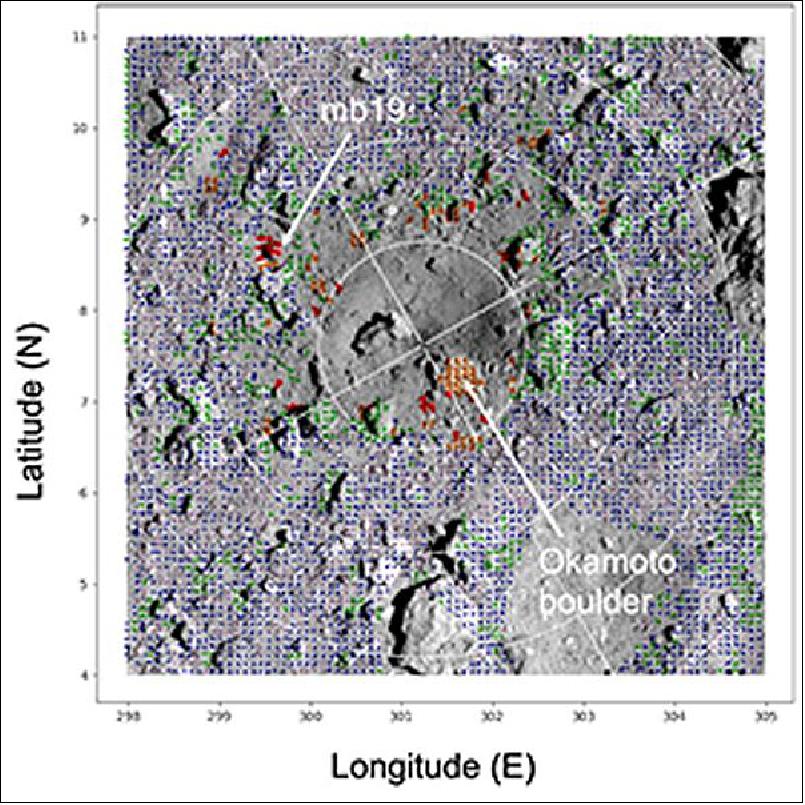
- The aim of impacting Ryugu with a ~13 cm SCI projectile was to recover a sample of the subsurface material. In addition, this provided a good opportunity to study the surface renewal processes (resurfacing) that result from an impact occurring on an asteroid with a surface gravity of 10-5 of the Earth’s gravity. The SCI succeeded in forming an impact crater, which was defined as a SCI crater with a diameter of 14.5 m (Arakawa et al., 2020), and the surface sample was recovered at TD2 (10.04°N, 300.60°E) (Figure 17). It was discovered that the crater center’s concentric area, which has a radius four times larger than the crater radius, was also disturbed by the SCI impact, causing boulder movement.
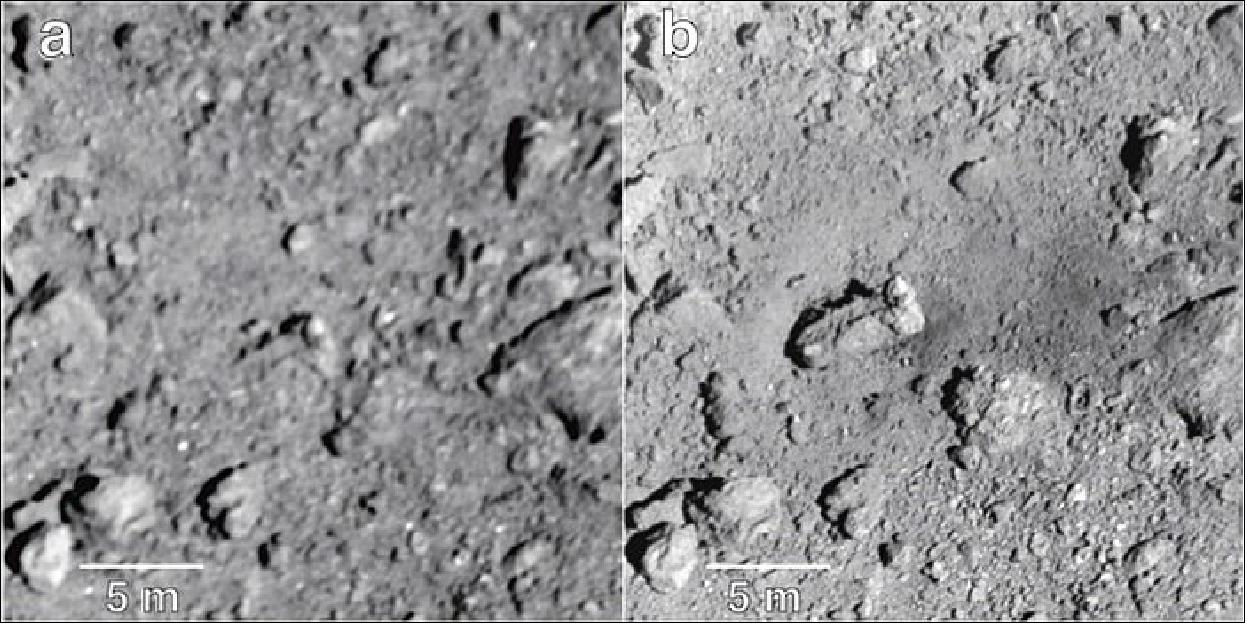
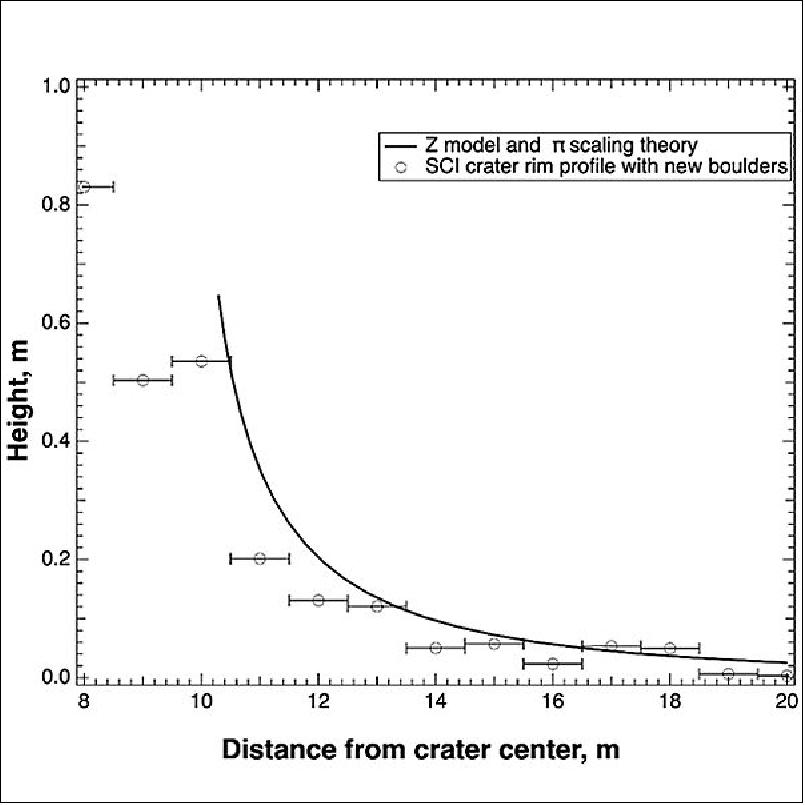
- The researchers subsequently compared surface images before and after the artificial impact in order to study the resurfacing processes associated with cratering, such as seismic shaking and ejecta deposition. To do this, they constructed SCI crater rim profiles using a Digital Elevation Map (DEM) consisting of the pre-impact DEM subtracted from the post-impact DEM (Figure 18). The average rim profile was approximated by the empirical equation of h=hr e[-(r/R rim - 1)/λrim] and the fitted parameters of hr and λrim were 0.475 m and 0.245 m, respectively. Based on this profile, the SCI crater’s ejecta blanket thickness was calculated and found to be thinner than that of the conventional result for natural craters, as well as that calculated from the crater formation theory. However, this discrepancy was solved by accounting for the effect of the boulders that appeared on the post-impact images because the crater rim profiles derived from the DEMs might fail to detect these new boulders (Figure 19). According to this crater rim profile, the thickness of the ejecta deposits at TD2 were estimated to be between 1.0 mm to 1.8 cm.
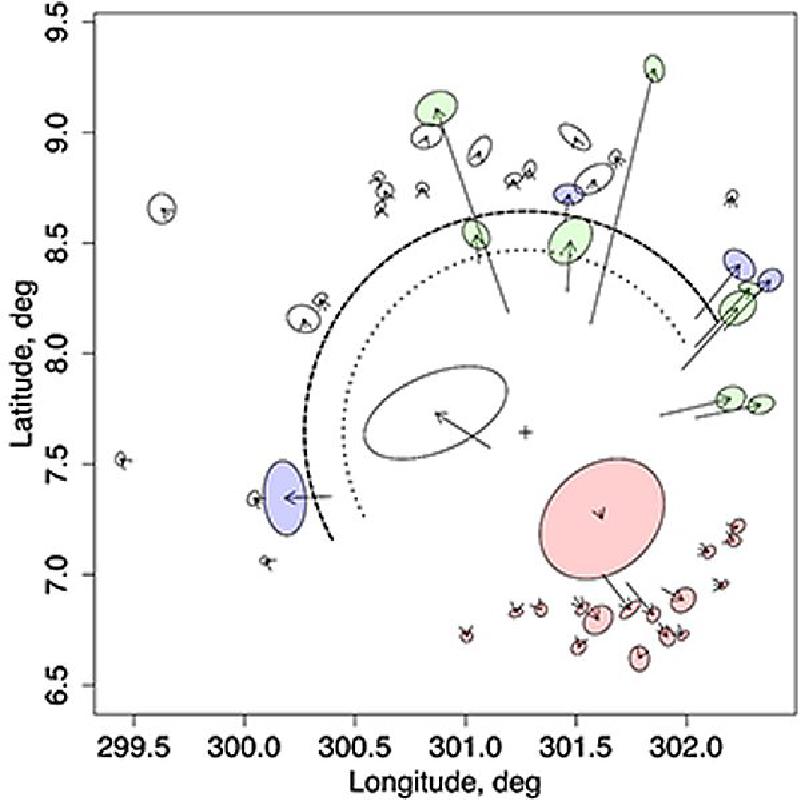
- The 48 boulders in the post-impact image could be traced back to their initial positions in the pre-impact image, and it was found that the 1 m-sized boulders were ejected several meters outside of the crater. They were classified into the following four groups according to their motion mechanisms: 1. excavation flow, 2. pushed by falling ejecta, 3. surface deformation dragged by the slight movement of the Okamoto boulder, and 4. seismic shaking caused by the SCI impact itself (Figure 20). In all groups, the motion vectors of these boulders seemed to radiate from the crater center.
- The 169 new boulders ranging from 30 cm to 3 m in size were found only in the post-impact images, and they were distributed up to ~40 m from the crater center. The histogram of the number of new boulders was studied in each radial width of 1m at a distance of 9–45 m from the crater center, with the maximum number of boulders being found at a distance of 17 m. Beyond 17 m, the number of boulders decreased in accordance with the increase in distance from the crater center.
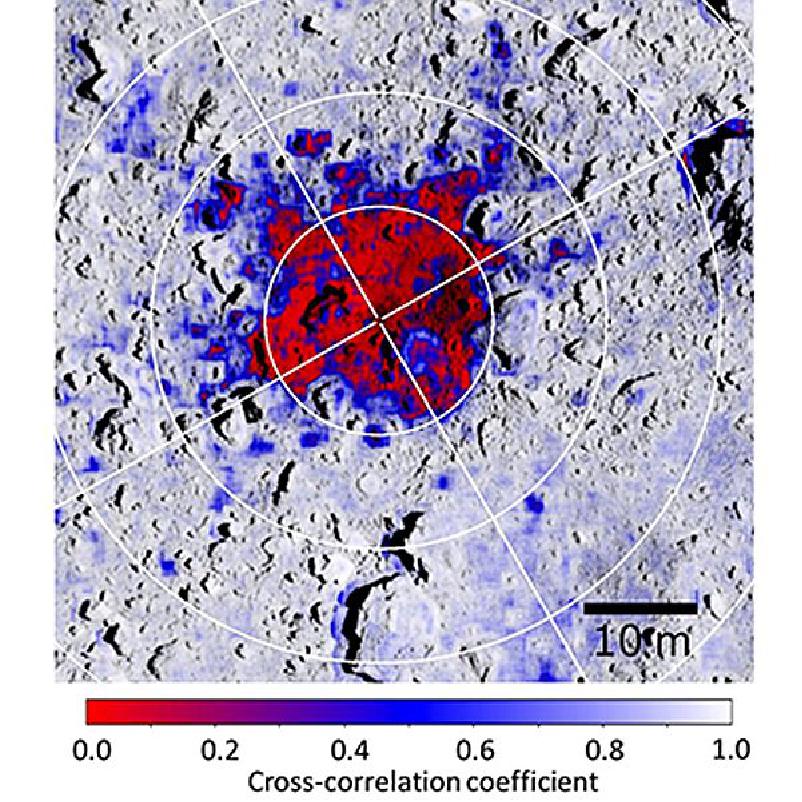
- To investigate this further, a correlation coefficient evaluation between the pre- and post-impact images was carried out. It was discovered that the low cross-correlation coefficient region outside the SCI crater has an asymmetric structure (Figure 21), which is very similar to the area around the impact point where ejecta were deposited (Arakawa et al., 2020, Ref. 25). Based on a template matching method using the correlation coefficient evaluation, the boulder displacements with cross-correlation coefficients above 0.8 were derived with a resolution of ~1 cm. This indicated that these displacements could be caused by the seismic shaking (Figure 22). Boulders were moved by more than 3cm in the area close to the SCI crater. This disturbance spans an area up to 15 m from the impact, with the motion vectors radiating out from the crater center. Disturbed areas that were displaced by 10 cm still exist in the regions farther than 15 m from the center, however they appeared as patches of a few meters in size and were distributed randomly. Furthermore, the direction of these motion vectors in the distant regions was almost random and there was no clear evidence indicating the radial direction from the crater center. 25)
- Displacements larger than 3 cm were detected within a 15 m distance with a probability of more than 50%, and between 15 m and 30 m with a probability of approximately 10%. Therefore, Arakawa et al. propose, in accordance with Matsue et al. (2020)’s experimental results, that the seismic shaking caused most of the area’s boulders to move at a maximum acceleration 7 times larger than Ryugu’s surface gravity (gryugu). Furthermore, they also discovered that the impact moved boulders at a maximum acceleration of between 7gryugu and 1gryugu in about 10% of the area. It is hoped that these results will inform future numerical simulations of small body collisions, as well as planetary missions involving artificial impacts.
• August 19, 2020: On August 10, 2020, JAXA was informed that the Authorization of Return of Overseas-Launched Space Object (AROLSO) for the re-entry capsule from Hayabusa-2 was issued by the Australian Government. The date of the issuance is August 6, 2020. 26)
- The Hayabusa2 reentry capsule will return to Earth in South Australia on December 6, 2020 (Japan Time and Australian Time). The landing site will be the Woomera Prohibited Area. The issuance of the AROLSO gave a major step forward for the capsule recovery.
- We will continue careful operation for return of Hayabusa-2 and recovery of the capsule, and the operation status will be announced in a timely manner.
- Comment from JAXA President, Hiroshi Yamakawa: The approval to carry out the re-entry and recovery operations of the Hayabusa-2 return sample capsule is a significant milestone. We would like to express our sincere gratitude for the support of the Australian Government as well as multiple organizations in Australia for their cooperation. We will continue to prepare for the successful mission in December 2020 in close cooperation with the Australian Government.
• July 14, 2020: Dr. Hiroshi Yamakawa, President, the Japan Aerospace Exploration Agency (JAXA) and Dr. Megan Clark AC, Head, the Australian Space Agency (the Agency) released a joint statement dated July 14 2020. The statement acknowledges that the capsule of ‘Hayabusa2’ containing the asteroid samples will land in South Australia on December 6, 2020. 27)
- JAXA and the Agency are working through JAXA’s plan for the re-entry and recovery of the capsule. The plan will be finalized by the issuance of Authorization of Return of Overseas Launched Space Object (AROLSO) from the Australian government.
- Joint Statement for Cooperation in the Hayabusa-2 Sample Return Mission by the Australian Space Agency and the Japan Aerospace Exploration Agency, 14 July 2020
- The Australian Space Agency (the Agency) and the Japan Aerospace Exploration Agency (JAXA) have been in close cooperation on JAXA’s asteroid sample-return mission, ‘Hayabusa-2’. The sample capsule is planned to land in Woomera, South Australia and the Agency and JAXA are working towards the planned safe re-entry and recovery of the capsule containing the asteroid samples.
- Recently, JAXA indicated that 6 December 2020 (Australia/Japan time) is its planned target date for the capsule re-entry and recovery. The Agency and JAXA are working through JAXA’s application for Authorization of Return of Overseas Launched Space Object (AROLSO), which will need to be approved under the Space Activities Act (1998).
- Successfully realizing this epoch-making sample return mission is a great partnership between Australia and Japan and will be a symbol of international cooperation and of overcoming the difficulties and crisis caused by the pandemic.
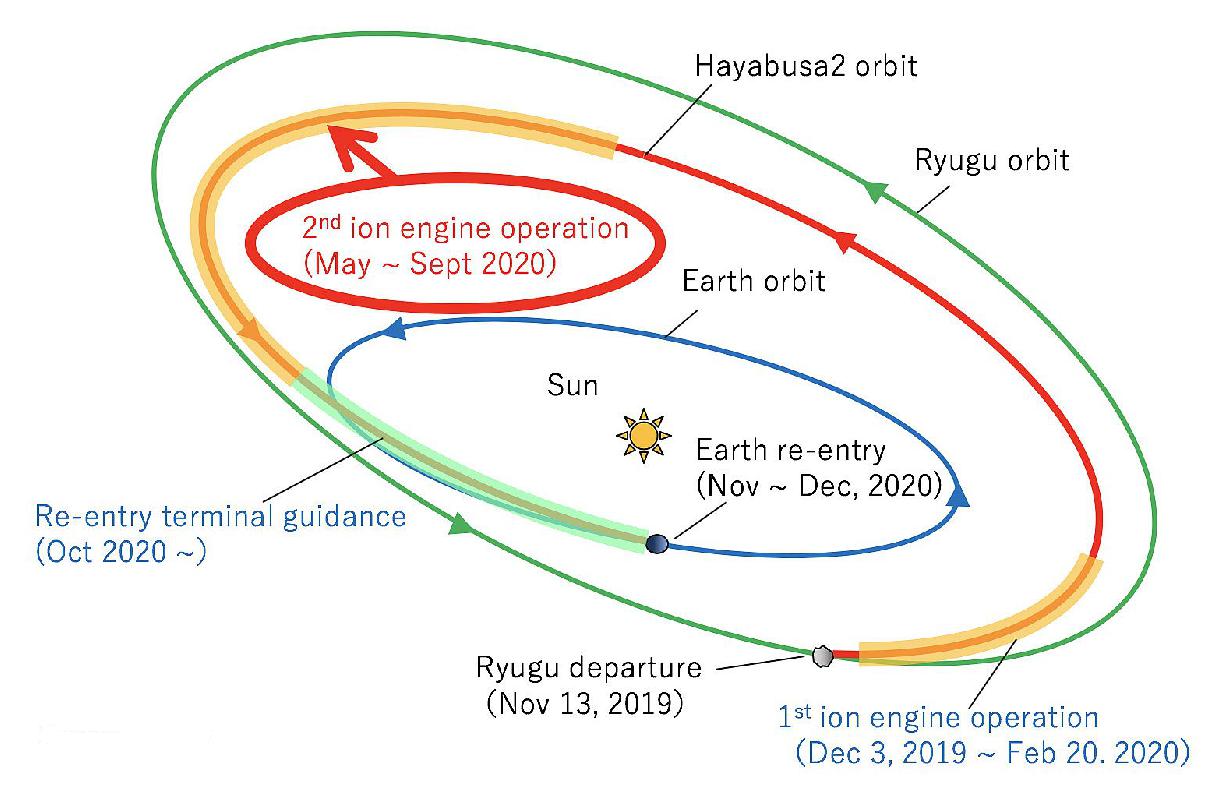
• May 13, 2020: The 2nd ion engine operation has begun. This is an important operation in the return journey of Hayabusa-2 back to Earth. On May 12, 2020, the ion engine ignited at 07:00 (onboard time, JST) and was confirmed to be operating stably at 07:25 (ground time, JST). Currently, only a single ion engine is operating as the spacecraft is far from the Sun, and receives a low level of solar power with which to operate the ion engines. 28)
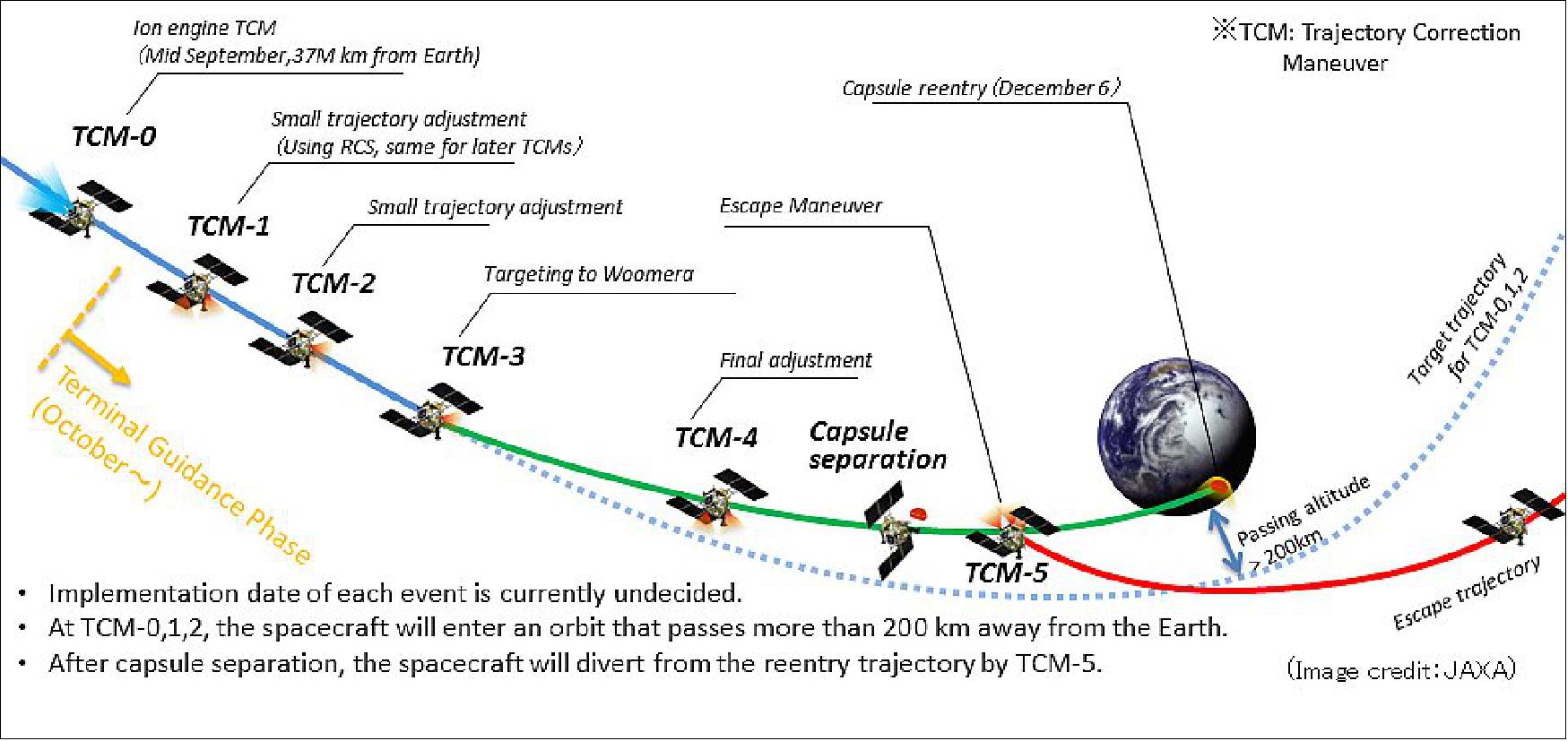
- The 2nd ion engine operation will continue until around September this year. At the end of the operation, the spacecraft will be in an orbit that can deliver the capsule to Earth. After that — from October of this year — we will perform precision guidance using the chemical thrusters (Figure 24).
• May 11, 2020: In February and July of 2019, the Hayabusa-2 spacecraft briefly touched down on the surface of near-Earth asteroid Ryugu. The readings it took with various instruments at those times have given researchers insight into the physical and chemical properties of the 1-km-wide asteroid. These findings could help explain the history of Ryugu and other asteroids, as well as the solar system at large. 29)
- When our solar system formed around 5 billion years ago, most of the material it formed from became the sun, and a fraction of a percent became the planets and solid bodies, including asteroids. Planets have changed a lot since the early days of the solar system due to geological processes, chemical changes, bombardments and more. But asteroids have remained more or less the same as they are too small to experience those things, and are therefore useful for researchers who investigate the early solar system and our origins.
- “I believe knowledge of the evolutionary processes of asteroids and planets are essential to understand the origins of the Earth and life itself,” said Associate Professor Tomokatsu Morota from the Department of Earth and Planetary Science at the University of Tokyo. “Asteroid Ryugu presents an amazing opportunity to learn more about this as it is relatively close to home, so Hayabusa-2 could make a return journey relatively easily.”
- Hayabusa-2 launched in December 2014 and reached Ryugu in June 2018. At the time of writing, Hayabusa-2 is on its way back to Earth and is scheduled to deliver a payload in December 2020. This payload consists of small samples of surface material from Ryugu collected during two touchdowns in February and July of 2019. Researchers will learn much from the direct study of this material, but even before it reaches us, Hayabusa2 helped researchers to investigate the physical and chemical makeup of Ryugu.
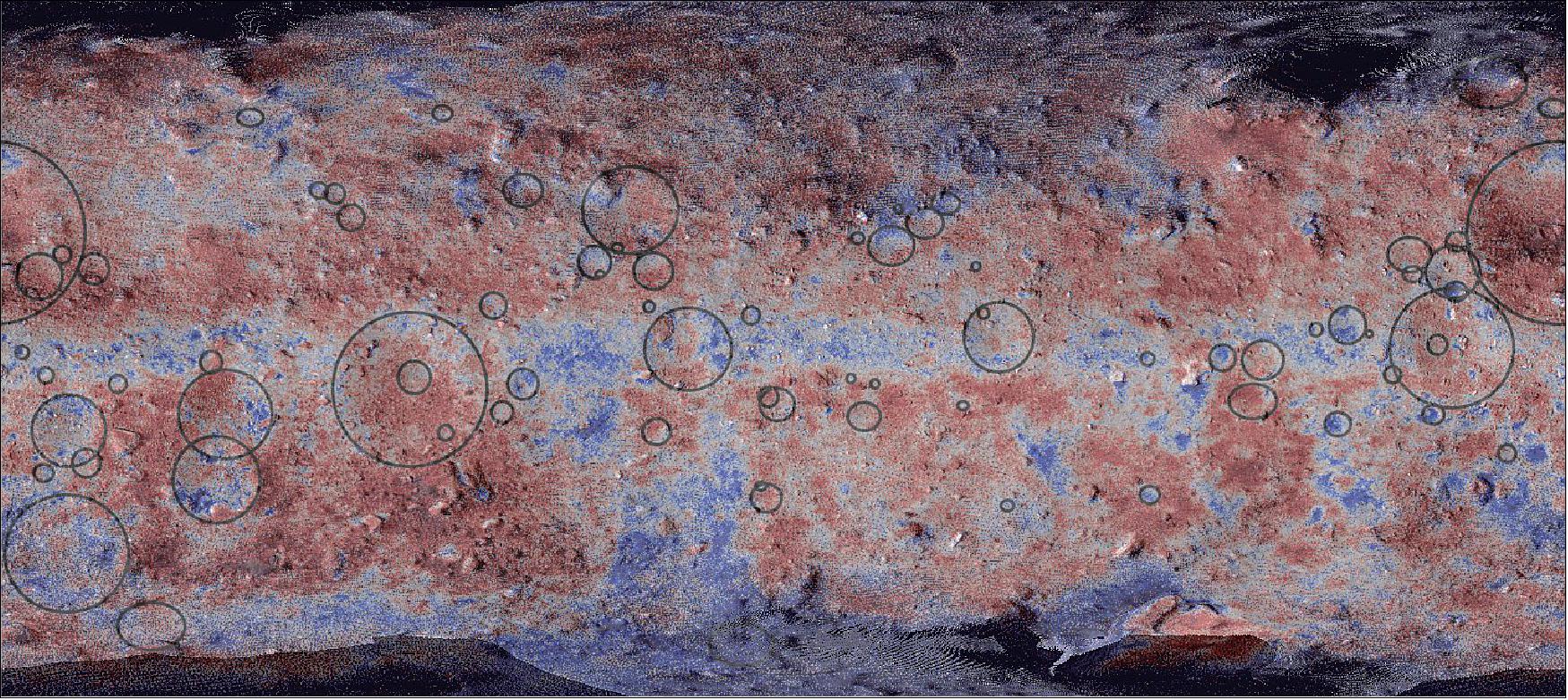
- “We used Hayabusa-2’s ONC-W1 and ONC-T imaging instruments to look at dusty matter kicked up by the spacecraft’s engines during the touchdowns,” said Morota. “We discovered large amounts of very fine grains of dark-red colored minerals. These were produced by solar heating, suggesting at some point Ryugu must have passed close by the sun.”
- Morota and his team investigated the spatial distribution of the dark-red matter around Ryugu as well as its spectra or light signature. The strong presence of the material around specific latitudes corresponded to the areas that would have received the most solar radiation in the asteroid’s past; hence, the belief that Ryugu must have passed by the sun.
- “From previous studies we know Ryugu is carbon-rich and contains hydrated minerals and organic molecules. We wanted to know how solar heating chemically changed these molecules,” said Morota. “Our theories about solar heating could change what we know of orbital dynamics of asteroids in the solar system. This in turn alters our knowledge of broader solar system history, including factors that may have affected the early Earth.”
- When Hayabusa-2 delivers material it collected during both touchdowns, researchers will unlock even more secrets of our solar history. Based on spectral readings and albedo, or reflectivity, from within the touchdown sites, researchers are confident that both dark-red solar-heated material and gray unheated material were collected by Hayabusa-2. Morota and his team hope to study larger properties of Ryugu, such as its many craters and boulders.
- “I wish to study the statistics of Ryugu’s surface craters to better understand the strength characteristics of its rocks, and history of small impacts it may have received,” said Morota. “The craters and boulders on Ryugu meant there were limited safe landing locations for Hayabusa-2. Finding a suitable location was hard work and the eventual first successful touchdown was one of the most exciting events of my life” (the paper is provided in Ref. 31).
• May 8, 2020: High-resolution images and video were taken by the Japanese space agency's Hayabusa-2 spacecraft as it briefly landed to collect samples from Ryugu - a nearby asteroid that orbits mostly between Earth and Mars - allowing researchers to get an up-close look at its rocky surface, according to a new report. During the touchdown Hayabusa-2 obtained a sample of the asteroid, which it will bring back to Earth in December 2020. 30)
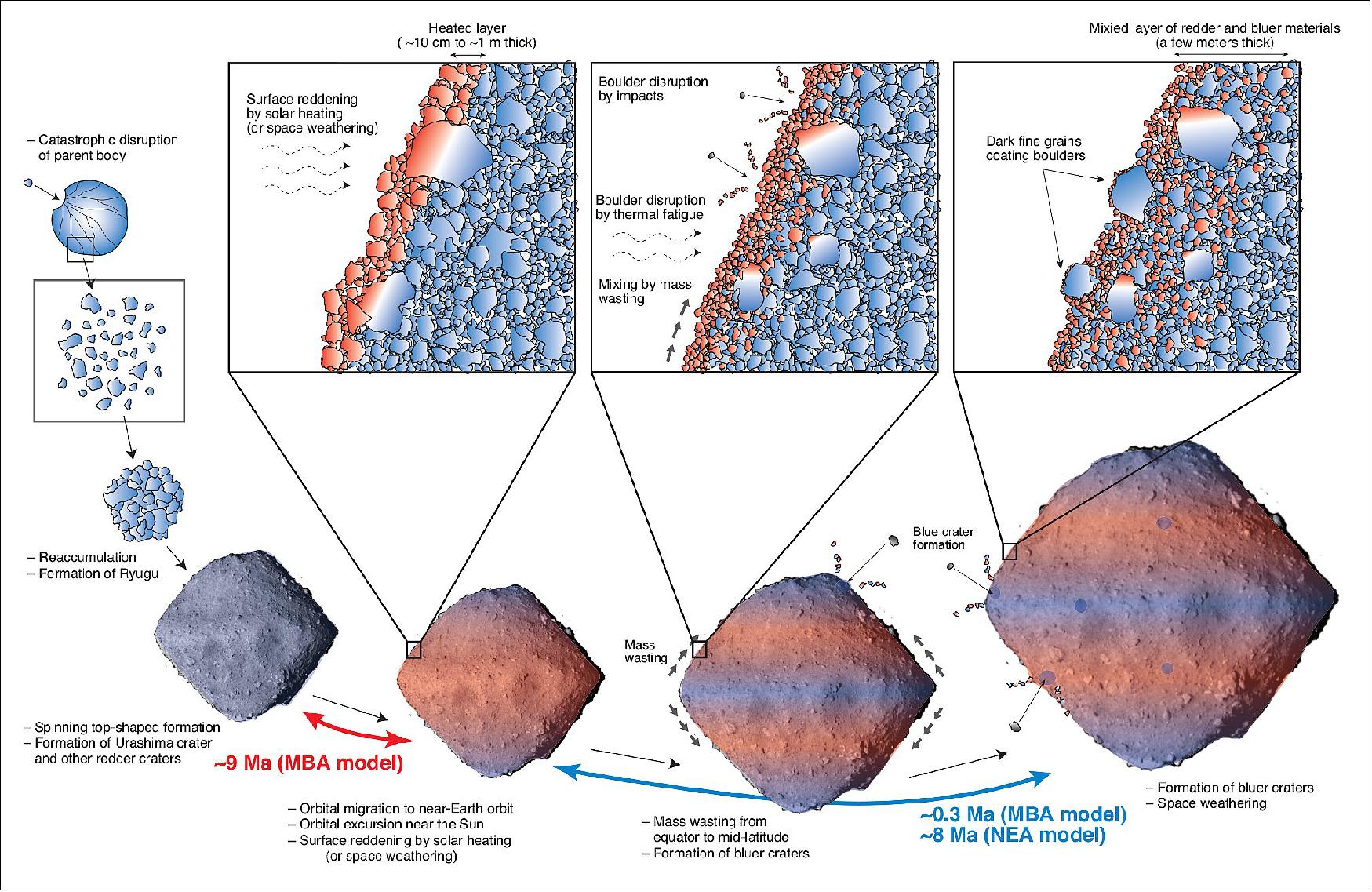
- The detailed new observations of Ryugu's surface during the touchdown operations help scientists understand the age and geologic history of the asteroid, suggesting that its surface color variations are likely due to rapid solar heating during a previous temporary orbital excursion near the Sun.
- On February 21, 2019, after months of orbital observations to select the target location, the Hayabusa-2 spacecraft descended to the surface of Ryugu to conduct its first sample collection, picking up surface material from the carbon-rich asteroid. Previous Hayabusa-2 observations have shown that Ryugu's surface is composed of two different types of material, one slightly redder and the other slightly bluer.
- The cause of this color variation, however, remained unknown. During Hayabusa-2's touchdown, onboard cameras captured high-resolution observations of the surface surrounding the landing site in exceptional detail - including the disturbances caused by the sampling operation. Tomokatsu Morota and colleagues used these images to investigate the geology and evolution of Ryugu's surface.
- Unexpectedly, Morota et al. observed that Hayabusa-2's thrusters disturbed a coating of dark, fine-grained material that appeared to correspond with the surface's redder materials. By relating these findings with the stratigraphy of the asteroid's craters, the authors conclude that surface reddening was caused by a short period of intense solar heating, which could be explained if Ryugu's orbit took a temporary turn towards the Sun. 31)
• March 16, 2020: Carbonaceous (C-type) asteroids are relics of the early Solar System that have preserved primitive materials since their formation approximately 4.6 billion years ago. They are probably analogues of carbonaceous chondrites and are essential for understanding planetary formation processes. However, their physical properties remain poorly known because carbonaceous chondrite meteoroids tend not to survive entry to Earth’s atmosphere. 32)
• March 16, 2020: The Solar System formed approximately 4.5 billion years ago. Numerous fragments that bear witness to this early era orbit the Sun as asteroids. Around three-quarters of these are carbon-rich C-type asteroids, such as 162173 Ryugu, which was the target of the Japanese Hayabusa2 mission in 2018 and 2019. The spacecraft is currently on its return flight to Earth. Numerous scientists, including planetary researchers from the German Aerospace Center (DLR), intensively studied this cosmic 'rubble pile', which is almost 1 km in diameter. Infrared images acquired by Hayabusa-2 have now been published in the scientific journal Nature. They show that the asteroid consists almost entirely of highly porous material. Ryugu was formed largely from fragments of a parent body that was shattered by impacts. The high porosity and the associated low mechanical strength of the rock fragments that make up Ryugu ensure that such bodies break apart into numerous fragments upon entering Earth's atmosphere. For this reason, carbon-rich meteorites are very rarely found on Earth and the atmosphere tends to offer greater protection against them. 33)
Thermal Behavior
- This investigation of the global properties of Ryugu confirms and complements the findings of the landing environment on Ryugu obtained by the German-French 'Mobile Asteroid Surface SCOuT' (MASCOT) lander during the Hayabusa-2 mission. "Fragile, highly porous asteroids like Ryugu are probably the link in the evolution of cosmic dust into massive celestial bodies," says Matthias Grott from the DLR Institute of Planetary Research, who is one of the authors of the current Nature publication. "This closes a gap in our understanding of planetary formation, as we have hardly ever been able to detect such material in meteorites found on Earth."
- In autumn 2018, the scientists working with first author Tatsuaki Okada of the Japanese space agency JAXA analyzed the asteroid’s surface temperature in several series of measurements performed with the Thermal Infrared Imager (TIR) on board Hayabusa-2. These measurements were made in the 8 to 12 µm wavelength range during day and night cycles. In the process, they discovered that, with very few exceptions, the surface heats up very quickly when exposed to sunlight. "The rapid warming after sunrise, from approximately minus 43 degrees Celsius to plus 27 degrees Celsius suggests that the constituent pieces of the asteroid have both low density and high porosity," explains Grott. About one percent of the boulders on the surface were colder and more similar to the meteorites found on Earth. "These could be more massive fragments from the interior of an original parent body, or they may have come from other sources and fallen onto Ryugu," adds Jörn Helbert from the DLR Institute of Planetary Research, who is also an author of the current Nature publication.
From Planetesimals to Planets
- The fragile porous structure of C-type asteroids might be similar to that of planetesimals, which formed in the primordial solar nebula and accreted during numerous collisions to form planets. Most of the collapsing mass of the pre-solar cloud of gas and dust accumulated in the young Sun. When a critical mass was reached, the heat-generating process of nuclear fusion began in its core.
- The remaining dust, ice and gas accumulated in a rotating accretion disk around the newly formed star. Through the effects of gravity, the first planetary embryos or planetesimals were formed in this disc approximately 4.5 billion years ago. The planets and their moons formed from these planetesimals after a comparatively short period of perhaps only 10 million years. Many minor bodies – asteroids and comets – remained. These were unable to agglomerate to form additional planets due to gravitational disturbances, particularly those caused by Jupiter – by far the largest and most massive planet.
- However, the processes that took place during the early history of the Solar System are not yet fully understood. Many theories are based on models and have not yet been confirmed by observations, partly because traces from these early times are rare. "Research on the subject is therefore primarily dependent on extraterrestrial matter, which reaches Earth from the depths of the Solar System in the form of meteorites," explains Helbert. It contains components from the time when the Sun and planets were formed. "In addition, we need missions such as Hayabusa2 to visit the minor bodies that formed during the early stages of the Solar System in order to confirm, supplement or – with appropriate observations – refute the models."
A Rock Like Many on Ryugu
- Already in the summer of 2019, results from the MASCOT lander mission showed that its landing site on Ryugu was mainly populated by large, highly porous and fragile boulders. "The published results are a confirmation of the results from the studies by the DLR radiometer MARA on MASCOT," said Matthias Grott, the Principal Investigator for MARA. "It has now been shown that the rock analyzed by MARA is typical for the entire surface of the asteroid. This also confirms that fragments of the common C-type asteroids like Ryugu probably break up easily due to low internal strength when entering Earth’s atmosphere."
- On 3 October 2018, MASCOT landed on Ryugu in free fall at walking pace. Upon touchdown, it 'bounced' several meters further before the approximately 10-kilogram experiment package came to a halt. MASCOT moved on the surface with the help of a rotating swing arm. This made it possible to turn MASCOT on its 'right' side and even perform jumps on the asteroid’s surface due to Ryugu's low gravitational attraction. In total, MASCOT performed experiments on Ryugu for approximately 17 hours.
Samples From Asteroid Ryugu
- Hayabusa-2 mapped the asteroid from orbit at high resolution, and later acquired samples of the primordial body from two landing sites. These are currently sealed in a transport capsule and are traveling to Earth with the spacecraft. The capsule is scheduled to land in Australia at the end of 2020. So far, the researchers assume that Ryugu's material is chemically similar to that of chondritic meteorites, which are also found on Earth. Chondrules are small, millimeter-sized spheres of rock, which formed in the primordial solar nebula 4.5 billion years ago and are considered to be the building blocks of planetary formation. So far, however, scientists cannot rule out the possibility that they are made of carbon-rich material, such as that found on comet 67P/ Churyumov-Gerasimenko as part of ESA's Rosetta mission with the DLR-operated Philae lander. Analyses of the samples from Ryugu, some of which will be carried out at DLR, are eagerly awaited. "It is precisely for this task – and of course for future missions such as the Japanese 'Martian Moons exploration' (MMX) mission, in which extraterrestrial samples will be brought to Earth – that we at DLR's Institute of Planetary Research in Berlin began setting up the Sample Analysis Laboratory (SAL) last year," says Helbert. The MMX mission, in which DLR is participating, will fly to the Martian moons Phobos and Deimos in 2024 and bring samples from the asteroid-sized moons to Earth in 2029. A mobile German-French rover will also be part of the MMX mission.
Hayabusa-1
Some background of Hayabusa-1: This rather important result of the Hayabusa-1 mission of JAXA was inserted in the Hayabusa-2 file due to a lack of a Hayabusa-1 file on the eoPortal. The MUSES-C (Mu Space Engineering Satellite) mission; launch May 9, 2003) with the nickname ”Hayabusa”, was a deep space asteroid sample return mission of JAXA. - In Nov. 2005, the spacecraft performed five descents, among which two touch-down flights were included. Actually Hayabusa made three touch-downs and one long landing on the surface of asteroid Itokawa during those two flights.
- After overcoming multiple serious glitches, and a three-year delay in its round-trip journey of over 5 billion km (or 5 x 109 km), JAXA's Hayabusa sample return canister landed in South Australia (Woomera) on June 13, 2010. The canister separated from the spacecraft about three hours before reaching Earth, and returned to Earth via parachute. The canister has been recovered by JAXA engineers, and will be taken to Japan where scientists will open it to find out if there is anything inside. 34)
- On Nov. 16, 2010, JAXA confirmed that the tiny particles inside the Hayabusa spacecraft‘s sample return container are in fact from the asteroid Itokawa. 35) Based on the results of the scanning electron microscope (SEM) observations and analyses of samples that were collected with a special spatula from sample catcher compartment "A", about 1,500 grains were identified as rocky particles, and most of them were judged to be of extraterrestrial origin, and definitely from Asteroid Itokawa. Their size is mostly less than 10 µm, and handling these grains requires very special skills and techniques. - These are the first samples from an asteroid ever returned to Earth.
• February 28, 2020: Mineralogists from FSU (Friedrich Schiller Universität) Jena, Germany, and Japan discover a previously unknown phenomenon in soil samples from the asteroid ‘Itokawa’: the surface of the celestial body is covered with tiny hair-shaped iron crystals. The team provides an explanation of how these were formed, and why asteroids can be unusually low in sulphur compounds, in the current issue of ‘Nature Communications’. 36) 37)
Itokawa would normally be a fairly average near-Earth asteroid - a rocky mass measuring only a few hundred meters in diameter, which orbits the sun amid countless other celestial bodies and repeatedly crosses the orbit of the Earth. But there is one fact that sets Itokawa apart: in 2005 it became a visit from Earth. The Japanese space agency JAXA sent the Hayabusa probe to Itokawa, which collected soil samples and brought them safely back to Earth — for the first time in the history of space travel. This valuable cargo arrived in 2010 and since then, the samples have been the subject of intensive research.

A team from Japan and Jena has now succeeded in coaxing a previously undiscovered secret from some of these tiny sample particles: the surface of the dust grains is covered with tiny wafer-thin crystals of iron. This observation surprised Prof. Falko Langenhorst and Dr Dennis Harries of Friedrich Schiller University in Jena. After all, over the last 10 years, research teams all over the world have exhaustively studied the structure and chemical composition of the dust particles from Itokawa, and no one had noticed the iron ‘whiskers’. It was only when Japanese researcher Dr Toru Matsumoto, who is spending a year as a visiting scientist with the Analytical Mineralogy group at the Institute of Geosciences in Jena, examined the particles with a transmission electron microscope that he was able to locate the crystals using high-resolution images.
Solar Wind Weathers Celestial Bodies
This discovery is exciting not only because the tiny iron ‘whiskers’ - which have since been shown on other particles from the asteroid as well - had previously been missed. Of particular interest is how they were formed. "These structures are the consequence of cosmic influences on the surface of the asteroid," explains Falko Langenhorst. In addition to rocks, high-energy particles from the solar wind also strike the asteroid’s surface, thus weathering it. An important constituent of the asteroid is the mineral troilite, in which iron and sulphur are bound. "As a result of space weathering, the iron is released from the troilite and deposited on the surface in the form of the needles that have now been discovered," says the mineralogist Langenhorst. The sulphur from the iron sulphide then evaporates into the surrounding vacuum in the form of gaseous sulphur compounds.
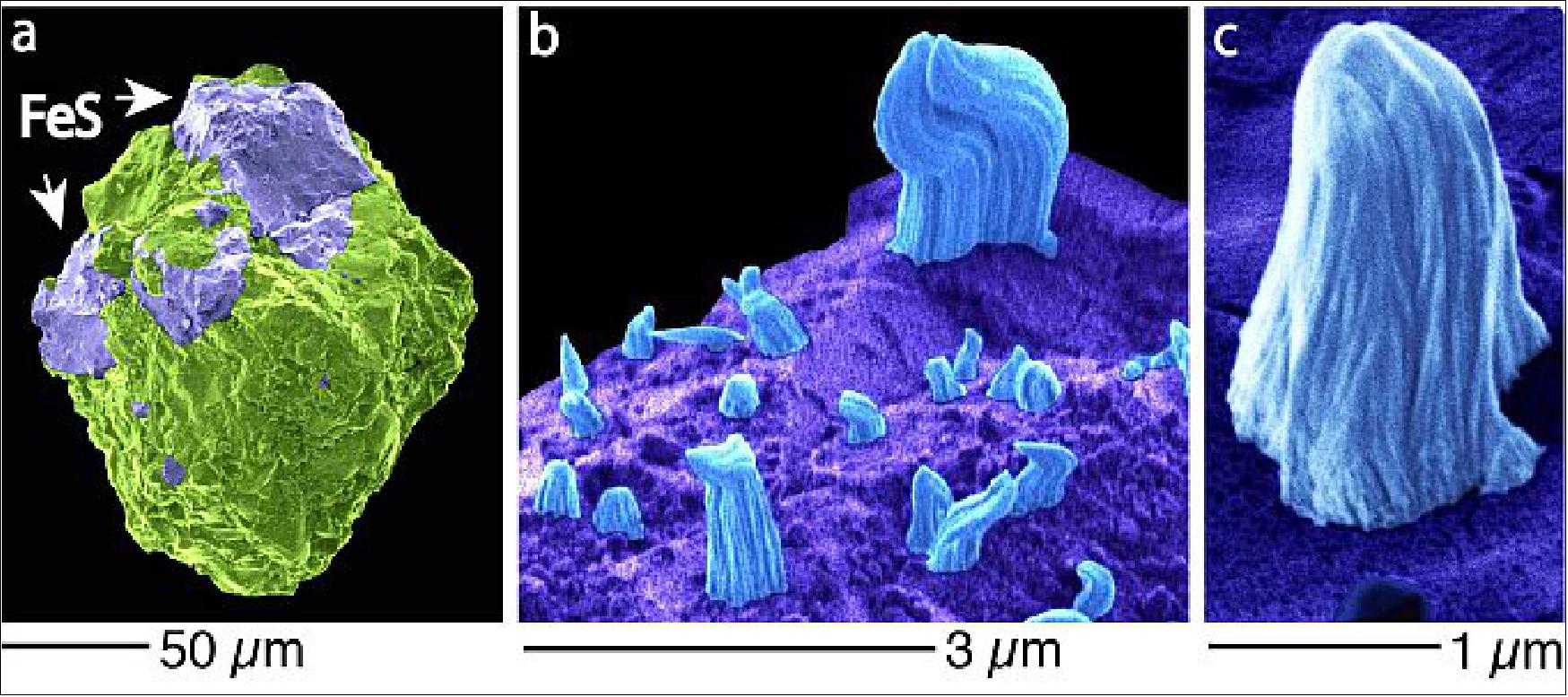
From the size and number of the ice crystals detected, the researchers can also estimate how quickly the asteroid loses sulphur. "The process is incredibly fast from a cosmic perspective," explains Toru Matsumoto. The crystals he analyzed are up to two-and-a-half micrometers long, which is around one-fiftieth of the thickness of a human hair. "The tiny whiskers have already reached these sizes after around 1,000 years," adds the researcher from Kyushu University in Fukuoka. Over the long term, the analysis of the ice crystals can be used to gain a better understanding of weathering processes on other celestial bodies as well, and to determine their age.
To this end, the researchers already have specific asteroids in their sights. NASA’s OSIRIS-REx probe is currently preparing to take samples from asteroid Bennu, while JAXA’s Hayabusa2 is already on its way back to Earth. The Japanese probe visited the Ryugu asteroid last year and, as with Itokawa, it collected dust particles. The samples should land on Earth at the end of 2020 and the international team of Jena mineralogists and Toru Matsumoto are awaiting them with anticipation
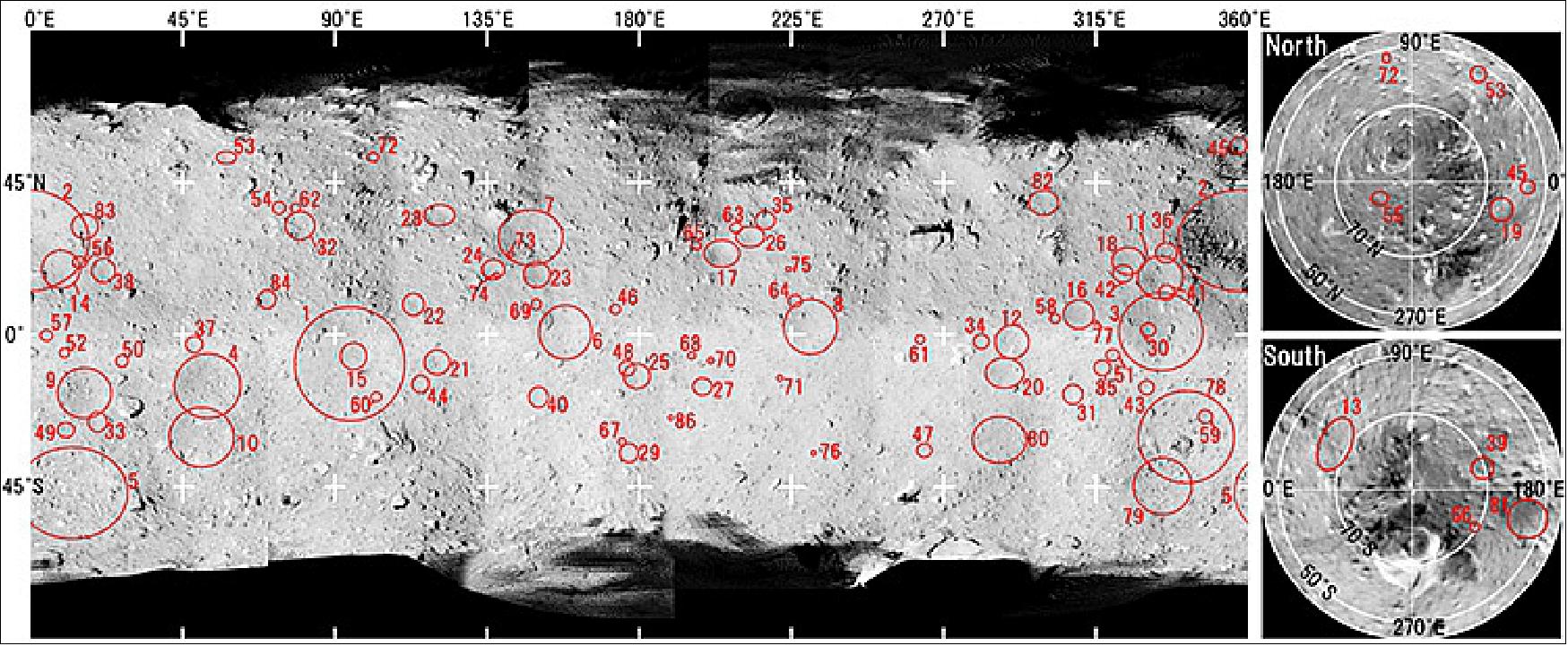
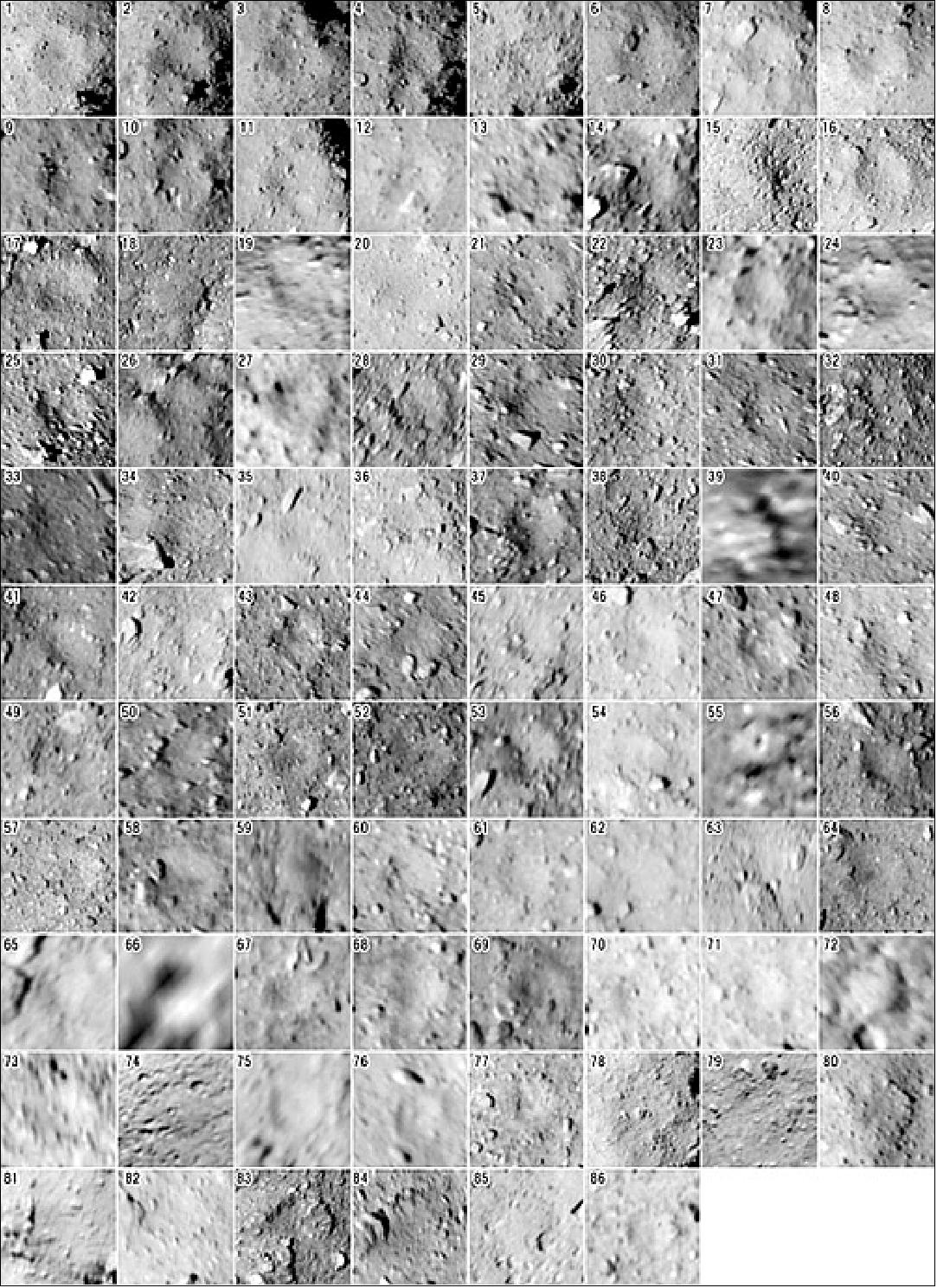
• November 27, 2019: Analysis of the impact craters on Ryugu using the spacecraft Hayabusa 2's remote sensing image data has illuminated the geological history of the Near-Earth asteroid. 38)
- A research group led by Assistant Professor Naoyuki Hirata of the Department of Planetology at Kobe University's Graduate School of Science revealed 77 craters on Ryugu. Through analyzing the location patterns and characteristics of the craters, they determined that the asteroid's eastern and western hemispheres were formed at different periods of time.
- It is hoped that the collected data can be used as a basis for future asteroid research and analysis. These results were first published in the American Scientific Journal 'Icarus' on November 5 2019.
- JAXA's Hayabusa-2 has been used to carry out various missions to increase our understanding of the spinning top-shaped, Near-Earth asteroid Ryugu. Since arriving in June 2018, the unmanned spacecraft has taken samples and a great number of images of the asteroid. It is hoped that these can reveal more about Ryugu’s formation and history.
- This research group focused on using the image data to determine the number and location of impact craters on the asteroid. Impact craters are formed when a smaller asteroid or a comet hits the surface of the asteroid. Analyzing the spatial distribution and the number of impact craters can reveal the frequency of collisions and aid researchers in determining the age of different surface areas.
Research Methodology
- First of all, the image data from Hayabusa-2 was analyzed. Hayabusa 2 has many different types of camera including Optical Navigation Cameras (ONC). The ONC team has been able to take around 5000 images of Ryugu, which have revealed many surface features- including impact craters. For this study, image data obtained from the ‘ONC-T’ camera between July 2018 and February 2019 was utilized. The research group had to determine which of these images showed craters. 340 images were used for crater counting, with stereopair images making it easier to identify the craters. A global image mosaic map was constructed from the ONC images and rendered onto the computer model of Ryugu’s shape. Small Body Mapping Tool software was then used to measure the size, latitude and longitude of the craters. A LiDAR (Light Detection and Ranging pulsed laser) was also utilized to determine the overall size of Ryugu.
- The depressions identified on Ryugu were divided into four categories- depending on how evident their circular appearance was. Category I to III depressions were classified as distinct craters. Category IV depressions only had quasi-circular features, therefore it was hard to determine whether they were craters or not. Many craters were filled with boulders or lacked a distinct shape. Depressions that were too vague to determine were left out of the results.
Research Results
- The research team were able to identify all impact craters over 10 to 20m in diameter on Ryugu’s entire surface- a total of 77 craters. Furthermore, a pattern was discovered in their distribution. The section of the eastern hemisphere near the meridian was found to have the most craters. This is the area near the large crater named Cendrillon - which is one of Ryugu’s biggest. In contrast, there are hardly any craters in the western hemisphere- suggesting that this part of the asteroid was formed later. The analysis also revealed that there are more craters at lower latitudes than at higher latitudes on Ryugu. In other words, there are very few craters in Ryugu’s polar regions.
- The equatorial ridge in the eastern hemisphere was determined to be a fossil structure. When asteroids like Ryugu rotate at high speeds, this can alter their shape. It is thought that this ridge formed in the distant past during a period when it only took Ryugu 3 hours to rotate. As the eastern hemisphere and western hemisphere were formed at different periods of the asteroid’s history- this suggests that there have been at least two instances where Ryugu’s rotational speed has increased.
• November 13, 2019: JAXA confirmed Hayabusa-2, JAXA's asteroid explorer, left the target asteroid Ryugu. 40)
- On November 13, 2019, JAXA operated the Hayabusa-2 chemical propulsion thrusters for the spacecraft's orbit control. The confirmation of the Hayabusa-2 departure made at 10:05 a.m. [JST (Japan Standard Time), 01:05 GMT] was based on the following data analyses:
a) The thruster operation of Hayabusa-2 occurred nominally
b) The velocity leaving from Ryugu is approximately 9.2 cm/s
c) The status of Hayabusa2 is nominal.
- The project is planning to conduct performance tests of onboard instruments, including the electric propulsion system, for the return to Earth. According to JAXA, the probe is expected to drop off its precious samples some time in late 2020.
• October 2019: Hayabusa-2 arrived at the C-type asteroid Ryugu in June 2018. During one and a half year of the Ryugu-proximity operation, we succeeded in two rovers landing, one lander landing, two spacecraft touchdown/sample collection, one kinetic impact operation and two tiny reflective balls and one rover orbiting. Among the two successful touchdowns, the second one succeeded in collecting subsurface material exposed by the kinetic impact operation. This paper describes the asteroid proximity operation activity of the Hayabusa-2 mission, and gives an overview of the achievements done so far. Some important engineering and scientific activities, which have been done in synchronous operations with the spacecraft to tackle the unexpected Ryugu environment, are also described. 41)
Asteroid Proximity Operation
- Summary of Asteroid-Proximity Activity: Hayabusa2 arrived at HP (Home Position) on 27 June 2018, when the asteroid proximity phase began. The HP is defined as the position 20 km from the asteroid center toward asteroid-Earth (sub-Earth) line. The HP is always located on the day side of the asteroid, since the Sun-asteroid-Earth angle varies between 0 to 39º during the 1.5 years of the asteroid proximity phase. The Sun-asteroid distance during the asteroid proximity phase varies between 0.96-1.4AU, and the Earth-asteroid distance varies between 2.0-2.4 AU, which corresponds to the round trip light time of 33-40 minutes.
- All the descent operations to lower altitude is defined as “critical operation” in the project, which were managed by a large operation team participated by 20-40 specifically-trained operators. Table 4 shows the list of the descent operations and the other important operations performed by Hayabusa-2. Overall, the asteroid-proximity activity proceeded as planned despite the fact that the environment of Ryugu was found to be unexpectedly severe, and some operations were aborted (i.e. the spacecraft detected a failure and ascent back to HP while descending).
Year | Date | Event | Status |
2018 | June 3 | Approach Guidance Start (Dist.=3100 km) | Complete |
2019 | February 20-22 | [TD1-L08E1] Touch Down Operation 1 | Success |
![Figure 32: Top left: Landing site candidates of Hayabusa-2 designated by L01...L13 and M01...M04. The size of each box is 100 m x100 m. Top right: Landing site candidates of MASCOT, designated by MA-1...MA-10, superimposed with some landing candidates of Hayabusa-2 to check the interference. Bottom Left: Landing site candidates of MINERVA-II-1, designated by N1...N7, superimposed with some landing candidates of Hayabusa-2. Bottom right: Finally selected landing candidates for Hayabusa-2 [Primary: L08, Backup: L07, M04), MINERVA-II-1 (N6) and MASCOT (MA-6)]. (image credit: JAXA, U. of Tokyo, DLR, CNES and collaborators)](https://eoportal.org/ftp/satellite-missions/h/Hayabusa2_280322/Hayabusa2_Auto6C.jpeg)
- Initial Ryugu Observation: On establishing the hovering state at HP, Hayabusa2 started initial observations of Ryugu using the remote science instruments, such as ONC-T (Optical Navigation Camera Telescopic); multi-band imager, ONC-W1 (Optical Navigation Camera-Wide), TIR (Thermal Infrared Imager), NIRS3 (Near-Infrared Spectrometer) and LIDAR (Laser Altimeter).
- The first two months of the proximity phase were dedicated to the LSS (Landing Site Selection) observation campaign. The objective of this campaign was to measure and acquire basic properties of Ryugu and to derive a set of landing sites for two MINERVA-II-1 rovers, one MASCOT lander, and a one spacecraft touchdown. The other sites (for the kinetic impact, the second touchdown and the MINERVA-II2 rover) were to be decided in the next LSS activity in 2019.
- Through this operation, Ryugu has been revealed to have an oblate body with an equatorial radius of 502 m and polar to equatorial axis ratio of 0.872. The asteroid spin state is upright and retrograde, having the obliquity of 171.64º with the period of 7.63262 hours. The spectral data obtained by ONC-T and NIRS3 indicate Ryugu is a Cb-type (carbon rich) with a very low geometric albedo of 4.5%, and is later proved to contain hydroxyl(OH)-bearing minerals all over the globe. One of the extraordinary features of Ryugu is that the number density of boulders is uniformly high across the surface, twice as high as that of Itokawa for boulders having diameter larger than 20 m, which led to the primary difficulty that the Hayabusa2 mission faced for deriving feasible landing sites. The gravity of Ryugu was measured to be GM=30.0 m3/s2 by a free-fall operation conducted on August 5-7, 2018. This GM corresponds to the bulk density of 1.19 g/cm3, showing that Ryugu is a rubble-pile.
- Two critical operations were conducted during the LSS observation camping phase. On July 31-August 2, “Mid-altitude descent observation” was conducted, in which the spacecraft has descent down to 5 km and stayed there for 8 hours to obtain high resolution observations for one rotational period. On August 5-7, “Gravity measurement descent” was conducted, in which the spacecraft descent down to 851 m above surface. The free-fall descent and free-ascent were conducted at the altitude below 5 km to measure the gravity. These two descent operations also enabled to create a landmark database necessary for the subsequent lower altitude descents, and contributed as an in-situ operation practice of the terrain-relative precision guidance.
- LSS (Landing Site Selection) Activity: Selecting landing sites required a variety of high-level products of the asteroid property. Many level-2 products, such as the shape model, surface composition map, gravity potential model, temperature map and boulder distributions map were created by integrating and cross-evaluating the raw observation data (level-1 products) obtained through the LSS observation campaign.
- Based on these level-2 products, level-3 maps which define candidate sites of the rover/lander/spacecraft landing were created. This level-3 maps were derived by integrating engineering feasibility, operation safety and scientific values.
- Figure 32 top-left shows 15 candidate sites for the spacecraft touchdown derived from engineering constraints. The spacecraft is to land to the surface along the sub-Earth line, and therefore the geometry with relative to the sub-Earth line is important. The sun angle, surface slope and terrain roughness with respect to the sub-Earth line have been evaluated based on the shape model of Ryugu. The pre-launch spacecraft design required 50 m (2.5 σ) landing accuracy. Hence the 15 boxes shown in the top left of Figure32 all have the size of 100 m x100 m.
- Specifically for Ryugu, the major drivers for deriving the spacecraft touchdown site candidates were engineering constraints (especially safety), reflecting the fact that the surface property of Ryugu is homogenous. Table 4 shows the scores evaluated by the science team for some of the candidate sites (the evaluation itself was done for all the candidate sites), showing that the scientific values of all the candidate sites are almost equal. 42)
- The landing site candidates for MINERVA-II-1 (Figure 32 bottom-left) and MASCOT (Figure 32 top-right) were derived by the Hayabusa-2 spacecraft operation team and the DLR/CNES MASCOT team, respectively from the viewpoint of engineering constraints (c.f. surface temperature, surface roughness, day-night ratio, landing dispersion) and scientific values.
- The “LSS Decision Meeting” was held on August 17, 2018 to review all the level-3 products and to derive a consistent set of landing sites for MINERVA-II-1, MASCOT and the spacecraft. The meeting was participated by 109 members including spacecraft engineers, science PIs (Principal Investigators) and international scientists. Thanks to extensive training and dry-run having done before arrival, including “Simulated LSS decision meeting” held on September 5, 2017, the meeting has reached the conclusion smoothly in one day with dense and constructive discussions. A set of landing site (MINERVA-II-1: N6, MASCOT: MA-9, Spacecraft: L08) with two backup spacecraft touchdown sites (L07 and M04) was selected such that these sites should not interfere with each other while maximizing scientific value and success probability of landings (Figure 32 bottom-right).
- The conclusion includes an important collateral condition for the spacecraft touchdown site; i.e. since none of the candidate sites perfectly fulfil the touchdown safety due to the high boulder density, as seen in Figure 33, the project is to search for a safer region within selected candidate sites by additional observations, and at the same time, to improve the landing accuracy to cope with narrower landing sites.
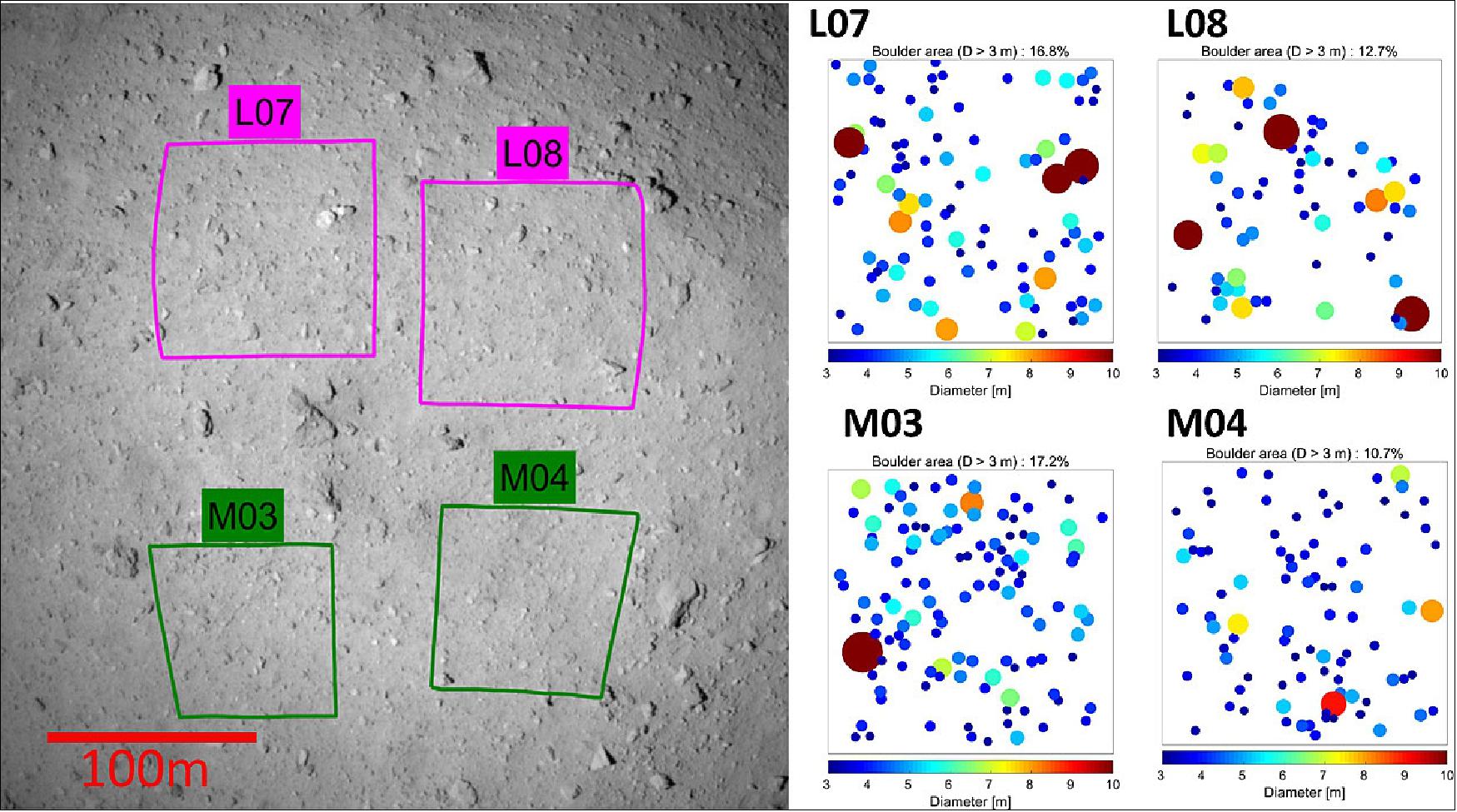
- Post-LSS Operations: Based on the LSS decision described above, several critical operations have been conducted.
- On September 11-12, the first touchdown rehearsal (TD1-R1) was conducted, targeting the center of the L08 site. This was the first attempt to descend to lower than 30 m to demonstrate the surface accessibility performance of Hayabusa-2 and to acquire the characteristics of LRF (Laser Range Finder) which is a critical component for the autonomous sequence of Hayabusa-2 below 30 m. The operation was aborted at the altitude of 600 m and spacecraft automatically ascent back to HP. The cause of it was an immatur LIDAR setting due to very low reflectance surface of the asteroid, and the spacecraft failed to measure the altitude.
- On September 20-21, the MINERVA-II-1 rovers release operation (MNV1) was conducted, followed by the MASCOT lander release operation (MSC) on October 2-5, both of which were successful.
- At the time MSC operation completed, the project decided a new strategy toward realizing the spacecraft touchdown. Based on three descent operations done in September-October, 2018, our terrain relative guidance accuracy performance was evaluated to be around 15 m, which was far better than the original specification of 50 m. On the other hand. due to the aborted TD1-R1 operation, the LRF performance had not been obtained. Thus the project decided to do additional two touchdown rehearsals (TD1-R1A and TD1-R3) before the actual touchdown operation. TD1-R1A is basically a retrial of TD1-R1 to acquire the LRF performance. TD1-R3 is to deploy the target marker (TM) on ground to precisely evaluate the our terrain relative guidance capability and the autonomous TM-tracking control performance of Hayabusa2. The TM is a 10 cm diameter ball covered with retro-reflective sheet. Hayabuas-2 is equipped with a flash lamp (FLA). The combination of TM and FLA enables an autonomous terrain relative control by a bright-spot tracking which is tolerant against highly uncertain surface condition. The target site of these two operations was set at L08-B1 whose diameter is 20 m and was selected because it is the flattest region in the L08 area.
- We succeeded in TD1-R1A on October 14-15 and TD1-R3 on October 24-25. After TD1-R3 the TM was identified settled on ground, 15.4 m off from the targeted center (Figure 34). The success of TD1-R3 marked a critical milestone for the project for two reasons, (i) the dropped TM location indicates that our terrain-relative guidance is as good as 15 m, (ii) the autonomous TM tracking capability at very low altitude (~12 m) is confirmed on Ryugu environment with ±1 m TM-relative positioning accuracy. These results opened a possibility toward a TM-relative pin-point touchdown which had not been planned originally.
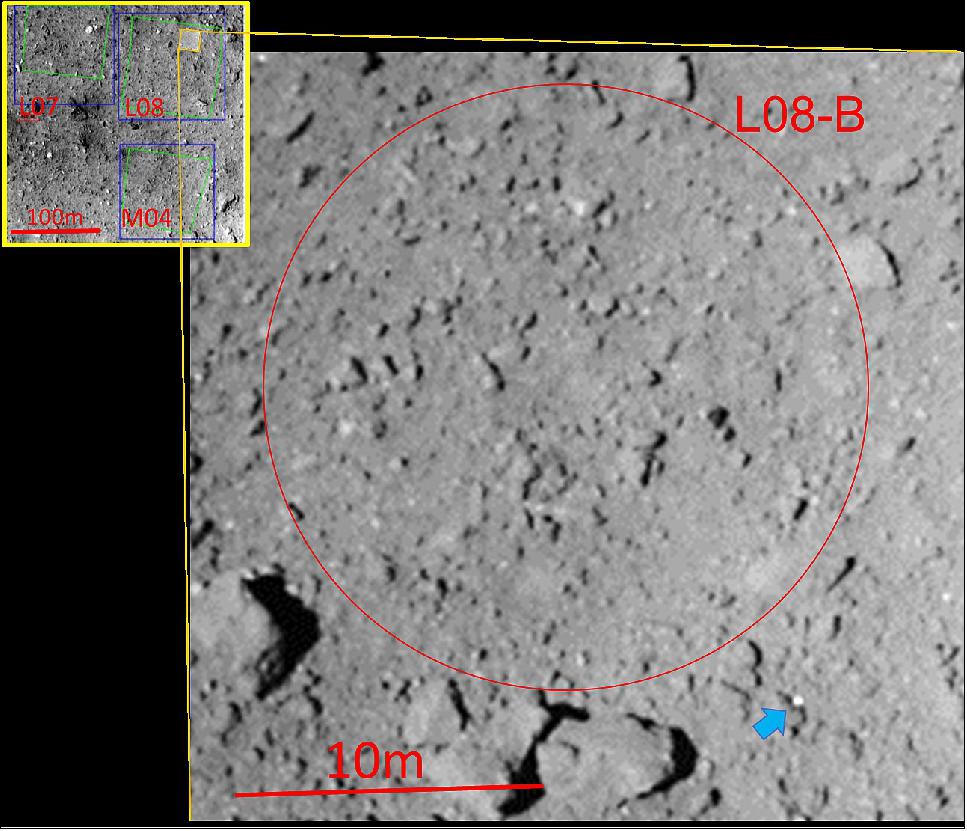
Critical Operation Achievements
- MINERVA-II-1 Rover Deployment Operation: The two MINERVA-II-1 rovers (Rover-1A named “HIBOU” and Rover-1B named “OWL”, Figure35 top-left) were deployed from the spacecraft at altitude of 55 m at September 21, 4:06 UT. A horizontal ΔV of 0.2 m/s was executed right before the separation to compensate for fast ejection velocity of the rovers, ensuring that the rovers should not exceed the escape velocity of Ryugu. The terrain-relative guidance accuracy at the release was 3.3 m.
- Two rovers were confirmed active immediately after the deployment, and some images captured by the rover onboard cameras were received by Hayabusa-2. On Sol 4 (4th asteroid day), Rover-1A was confirmed doing some autonomous hops, and Rover-1B as well on Sol 7. The final decodable telemetry was received on Sol 114 for Rover-1A and Sol 10 for Rover-1B. The carrier signal of Rover-1B was successfully received again on August 2, 2019 for about 10 minutes at a rather distant location from the original landing point, which indicates that the rover has acted on the Ryugu surface for more than 10 months.
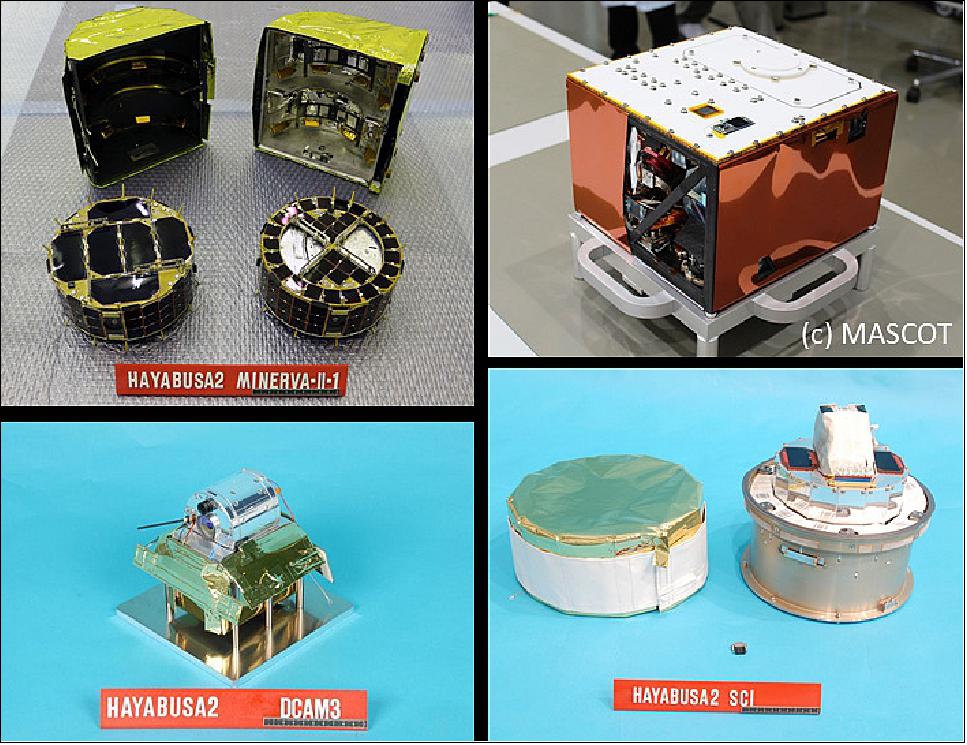
- Over the whole MINERVA-II-1 operation, a few hundreds of images (including movies and stereo images) as well as the surface temperatures were obtained (Figure 36). The two rovers have become the world’s first mobile landers to successfully act on a small body. The landing site N6 was nicknamed “Tritonis” by the MINERVA-II-1 team.
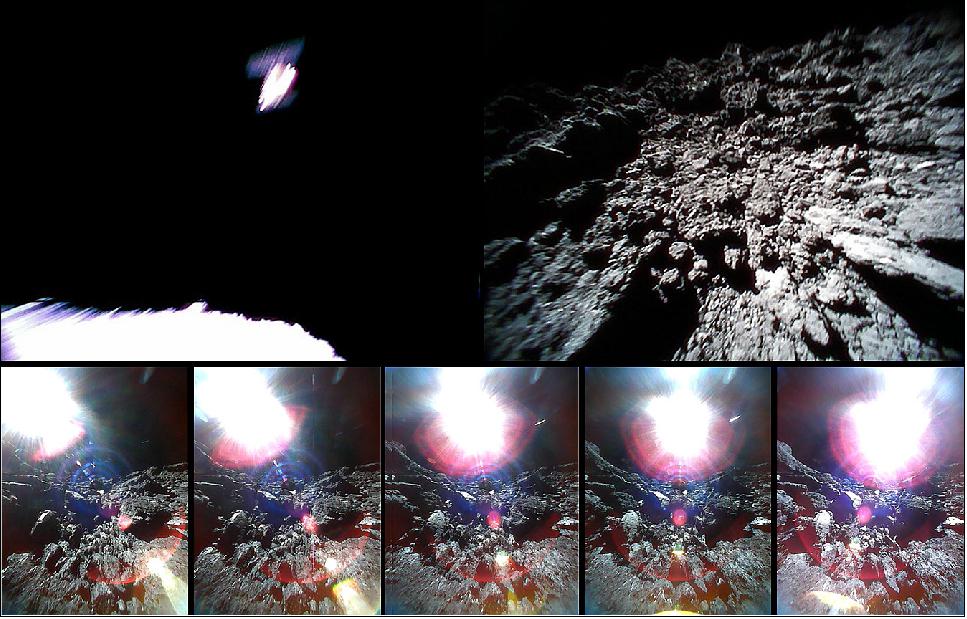
- MASCOT Lander Deployment Operation: The MASCOT lander (Figure 35 top-right), developed by DLR and CNES was successfully deployed from the spacecraft at the altitude of 51m at October 3,1:57UT. The separation was later confirmed by the Hayabusa-2 onboard cameras ONC-W2 and ONC-W1 (Figure 37). No horizontal compensation was executed for this release, as the MASCOT separation mechanism deploys the lander very slowly (~5 cm/s). The terrain-relative guidance accuracy at the release was 30 m.
- Different from MINERVA-II rovers, MASCOT is driven by primary battery and can be active for 17 hours from the separation (i.e. 3-4 Sols). The project team prepared the biggest operation organization for this operation. The operation center for the MASCOT was placed in Cologne, Germany, and was connected online to SSOC (Sagamihara Space Operation Center), the operation center for Hayabusa-2 in Japan. A 24 hours continuous coverage was prepared to cover the whole life time of MASCOT using ground stations of JAXA Usuda Deep Space Center, NASA Deep Space Network, and ESA (ESTRACK) Malargüe station. The MASCOT telemetry and command operations were performed through the rover communication component (OME-E) which realizes a simultaneous two-way communication with MASCOT and all the MINERVA-II rovers.
- The MASCOT was confirmed active immediately after release, and landed to MA-6 region a few minutes later after some bounces. On Sol 1, the lander was found to sit on the ground with inappropriate orientation. Hence the MASCOT team decided to command a “hop” on Sol 2, which was successful. Thereafter, extensive scientific observations were performed on Sol 2-3. On Sol 3 a small relocation hop was commanded by the MASCOT team to do some additional observations with different attitude, which was also successful. The last telemetry was received in the dawn of Sol 3, and the battery was estimated to deplete after 17 hours of the successful surface activity. The landing site MA-6 was nicknamed “Alice’s Wonderland” by the MASCOT team.
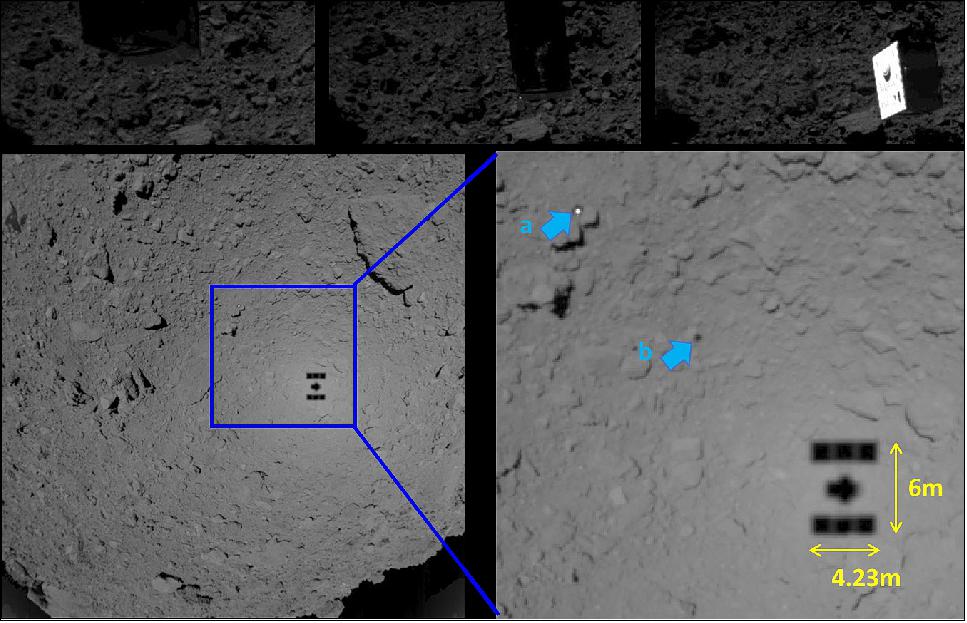
- First Touchdown and Sampling Operation: The original touchdown sequence used the Target Marker (TM) to eliminate the terrain-relative velocity at the final phase of landing. From the result of TD1-R3, however, the project team acquired a great confidence on the TM-tracking capability of Hayabusa-2, and decided to re-configure the onboard guidance program such that the final landing sequence should use the TM for terrain-relative position control in addition to the velocity compensation.
- This technique had been prepared for the crater landing and is called “pin-point touchdown”, which would have been planned after the kinetic impact operation. With this pin-point touchdown as a basis, some modifications were applied to be suited to the L08-E1 landing. For example, four “check points” (Figure 38) were implemented onboard for the autonomous sequence below 45 m such that, if the pre-programmed status conditions were not fulfilled, the spacecraft is to automatically abort and the ascent-back ΔV is to be triggered. The second example is a “tail-up” attitude (Figure 38) adopted for the final touchdown attitude so as to minimize the risk for any part of the spacecraft body other than the sampler horn hitting terrain. By tilting up the attitude by 10 degree from the locally horizontal attitude, additional 10 cm margin has been gained on the minimum distance between the local terrain and the spacecraft body.
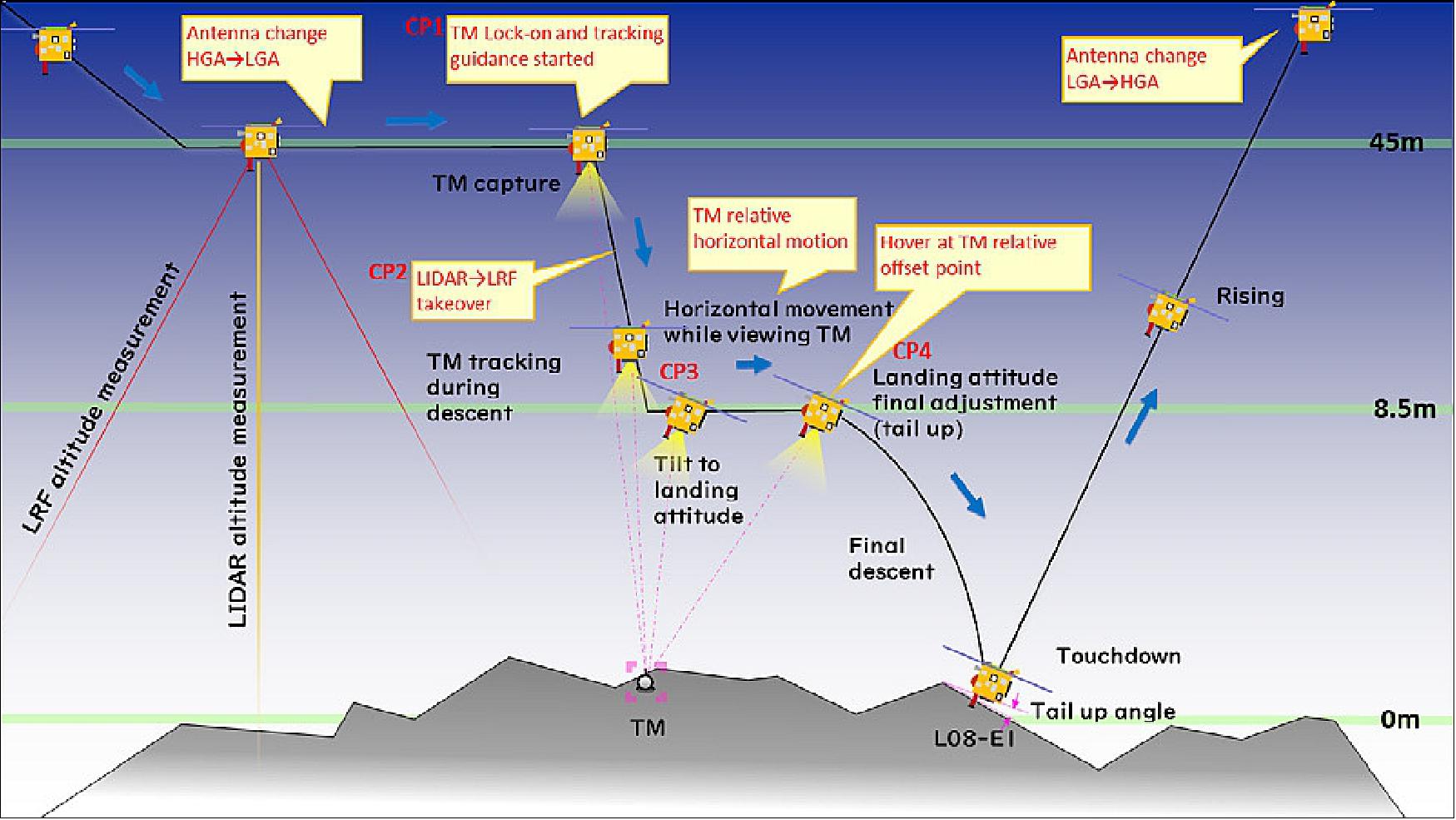
- In terms of our terrain knowledge, high resolution images obtained in a series of low altitude operations (MNV, MSC, TD1-R1A and TD1-R3) enabled us to create a precise boulder distribution map (Figure 39) and a digital elevation map (Figure 40 right) with a few centimeter accuracy, which is good enough for a sub-meter level safety evaluation. By using these maps, two new landing candidate sites were found within the L08 area, L08-B1 and L08-E1 (Figure 40 left). L08-B1 is located 15 m distant from the dropped TM, and spans about 12 m. L08-E1 is located 4.2 m distant from the TM, and spans about 6 m.
- Combining these two progresses (i.e. improvements in the touchdown accuracy and the terrain knowledge), the project team decided to choose L08-E1 for the first touchdown target. L08-E1 is a narrower region but closer to the dropped TM than L08-B1, and was found to be only feasible region that Hayabusa-2 can target with the updated landing accuracy (Figure 40 right).
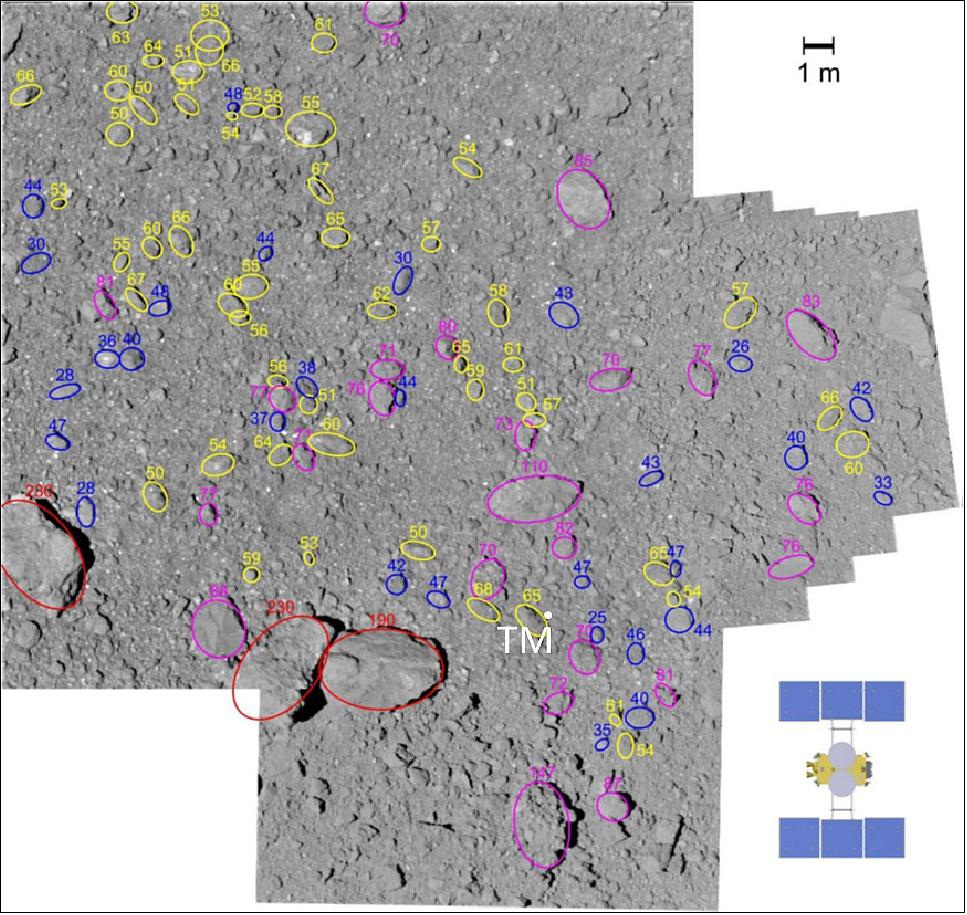
- The touchdown operation 1 (TD1-L08E1) was conducted on February 19-22, 2019. Due to a miss-configuration in the pre-descent activity, the start of descent was delayed by 5 hours, which was recovered by adopting a faster descent rate trajectory to catch up with the original descent path at around the altitude of 6.5 km. The spacecraft was commanded “Go” for autonomous landing at February 21, 21:10 UT at the altitude of about 500 m, and reached the altitude of 45 m at 22:07 UT. Then the spacecraft successfully captured and locked the dropped TM, and started TM-tracking descent to 8.5 m. At 8.5 m, a horizontal maneuver was triggered, and the spacecraft moved about 4 m toward northeast. On converging the horizontal motion, the final free-fall descent was triggered autonomously, and the spacecraft touched the ground at 22:29:10 UT. One of four touch down detection sources (attitude rate limit) was triggered, when a projectile was ejected and an ascent-back ΔV was executed 0.1 seconds later as planned. Four 20 N thrusters on the bottom of the spacecraft were activated for 4.7 seconds to attain the total ascend-back ΔV of 0.64 m/s. The autonomous activity below 45 m was done with non-Earth pointing attitude, limiting the communication link to the Earth only with a Low Gain Antenna. Therefore, the low altitude onboard activity was monitored on ground solely by the carrier signal receive power and the Doppler signals (Figure 41).
- The successful touchdown was confirmed soon through the play-back telemetry of rising temperature of the fired projector at the touchdown, and also of the sequence progressing normally as pre-programmed. There are three container rooms in the Hayabusa-2 sampling system. As we confirmed the touchdown, the sampler room A was commanded “Close” at February 22, 2:20 UT, and the sample collected in the TD1-L08E1 operation has been secured.
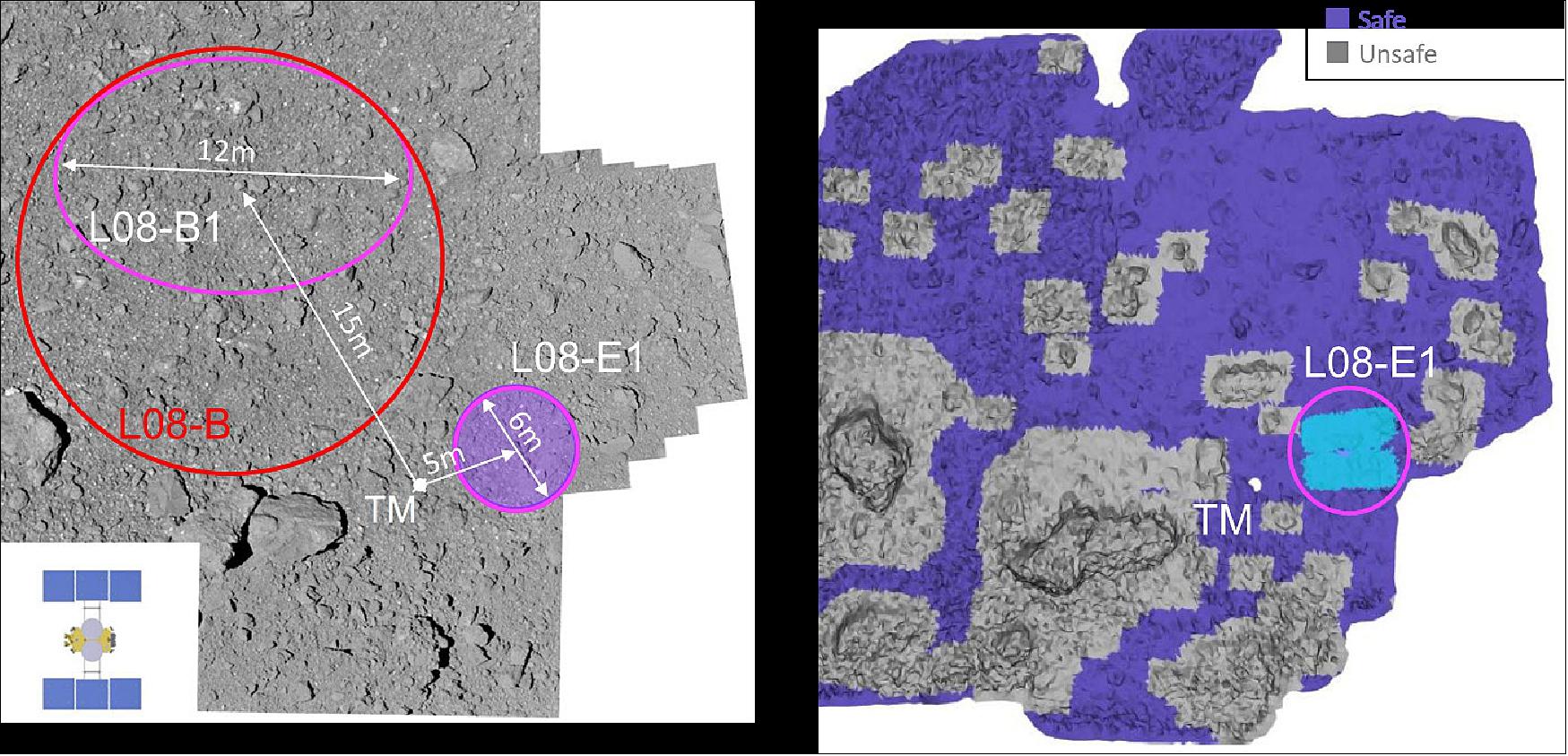
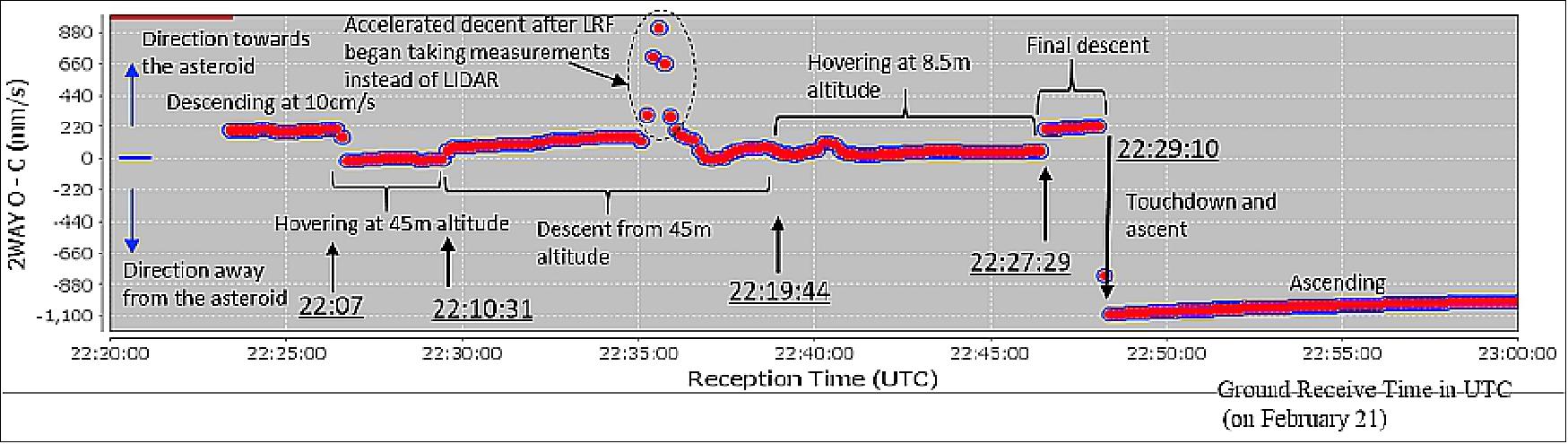
- The moment of the touchdown was recorded by ONC-W1 (Figure 42) and CAM-H (a sampler-horn monitor camera, Figure 43). As observed in these images, many fragments were seen to be ejected as the reaction of the projectile shooting and the ascend-back ΔV. Processing images by these cameras revealed that the resulting landing accuracy was 1 m, which was within the L08-E1 requirement accuracy of 3 m. The sampling location has been also resolved precisely, which was 20 cm off from the center of L08-E1 (Figure 44).
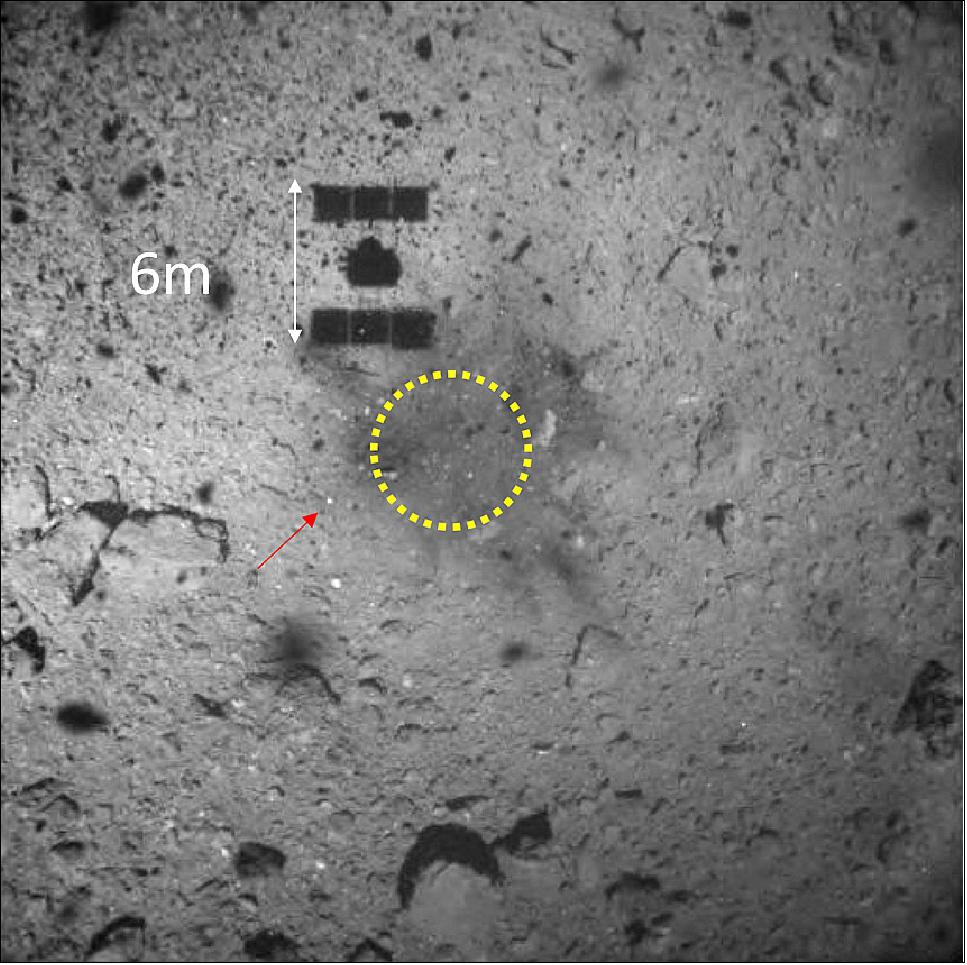
- The landing site L08-E1 was then nicknamed “Tamatebako” (meaning “Treasure Box”) by the Hayabusa-2 project team.
- At this moment, as we had spent 4 months longer than the original plan to realize the first touchdown, a decision was made to cancel the second touchdown, which had been performed after the first touchdown, and to directly move on to the kinetic impact operation.
- Kinetic Impact Operation: The kinetic impact is to be done by SCI (Small Carry-on Impactor), Figure 35 bottom-right. It has a mass of 15 kg and is to be separated from the bottom of the spacecraft. SCI is to be ignited by an SCI-onboard timer, and the 2 kg copper bullet is to be ejected at the speed of 2 km/s. For the operation planning purpose, the targeting accuracy from the nominal stand-off distance of 500 m was set to be as conservative as 200 m (3σ), which included the accuracy of SCI acceleration itself as well as the spacecraft attitude and guidance errors. Because of this relatively large dispersion, SCI was planned to be released exactly on the Sub-Earth line, leading to a constraint that the center of the impact target should be on the equatorial ridge of Ryugu.
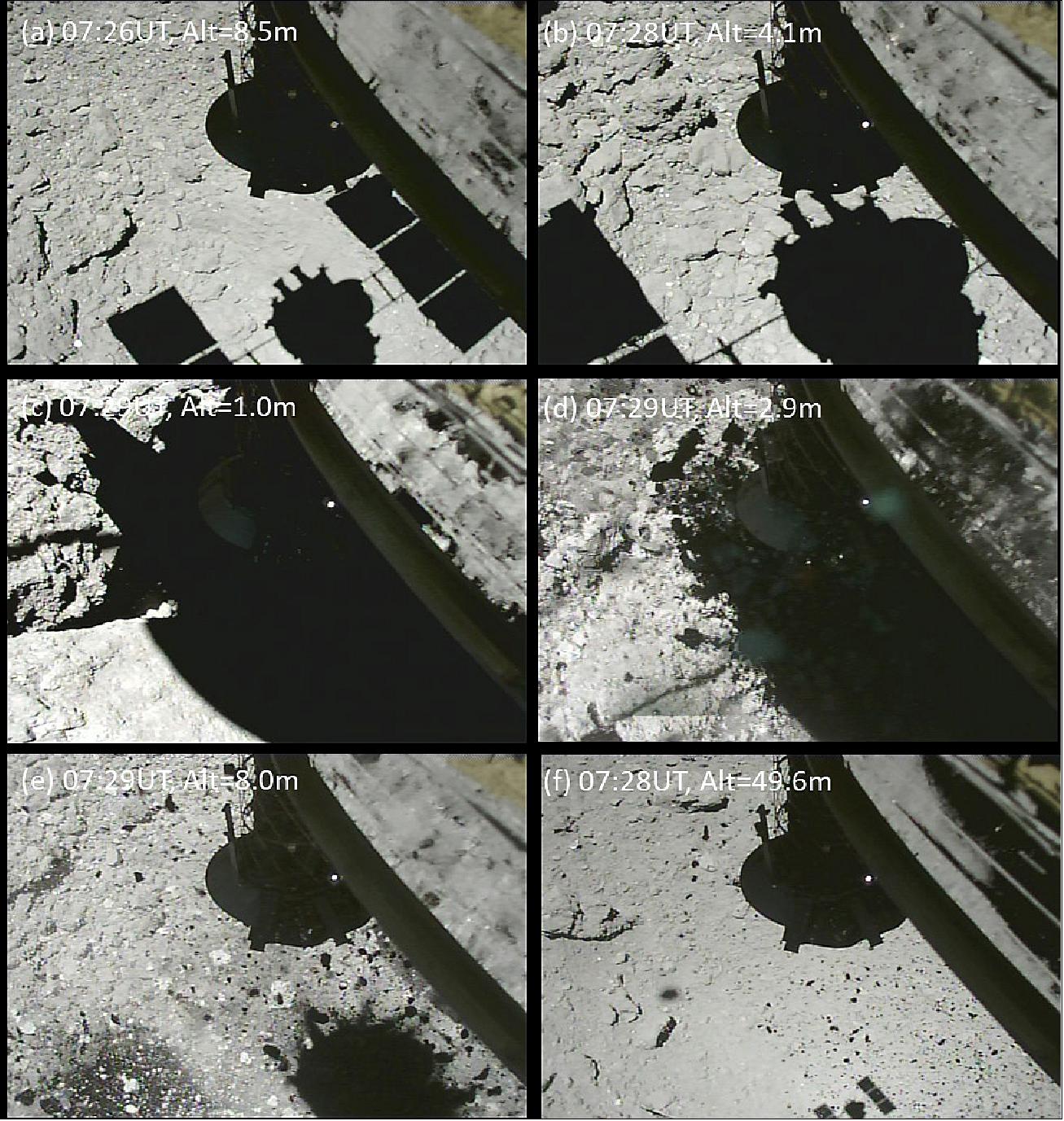
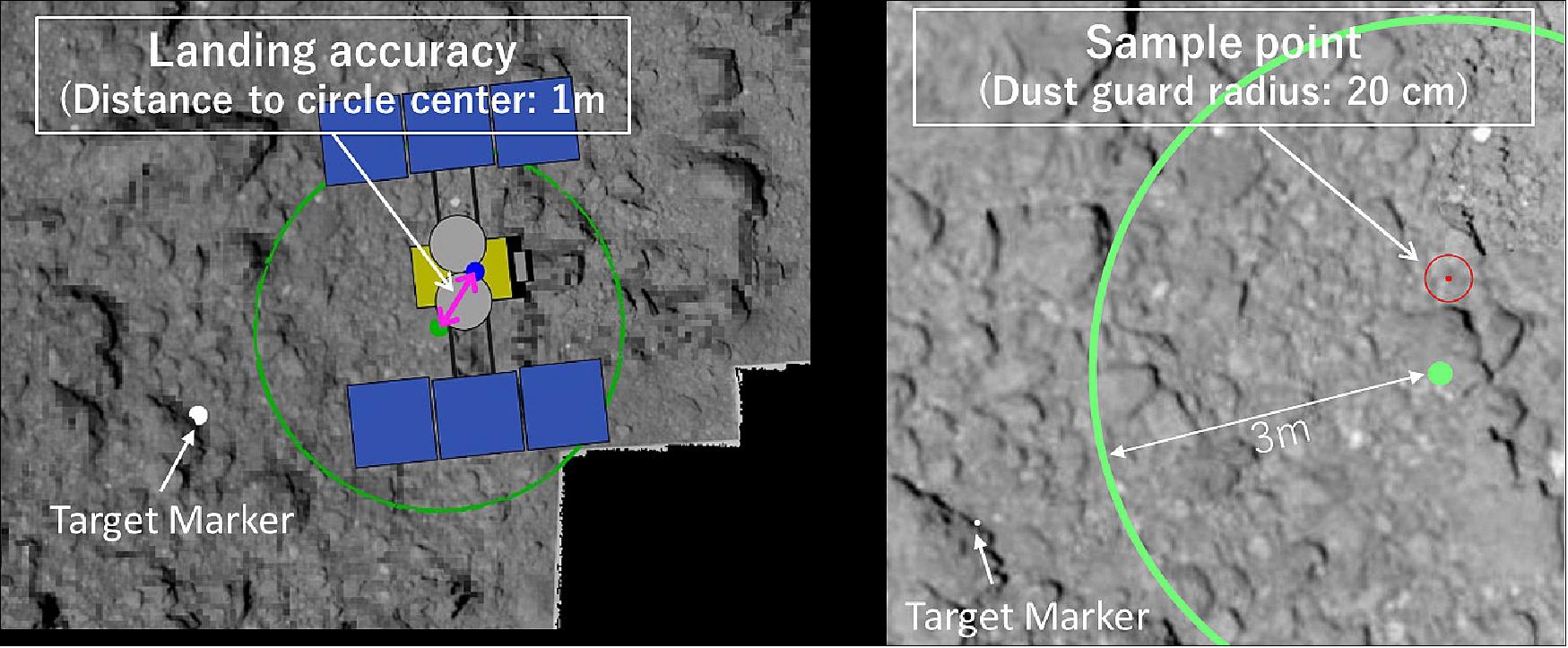
- The target point of the kinetic impact was called “S01” region, which is located on the equatorial ridge of Ryugu, apart longitude-wise from the L08 landing site (Figure 45). There are two requirements on the kinetic impact target site; (i) maximizing the possibility to create a large crater detectable by the post-impact observations by the onboard instruments, and (ii) maximizing the landability in terms of terrain condition (for safety). S01 was found through the global survey activity which had been done in parallel with the first touchdown activity. Due to the highly homogeneous surface property of Ryugu, the main driver for selecting the impact site was (ii) rather than (i). S01 was found to maximize (but not to fulfil due to the very large impact dispersion) the landability condition.
- Prior to the SCI operation, two critical operations were performed. One is the S01 low altitude descent observation (DO-S01, March 6-8, 2019), another is a pre-impact crater search operation (CRA1, March 19-22, 2019). These two operations provided the original (pre-impact) terrain information around the SCI target. After the SCI operation, a post-impact crater search operation (CRA2) was conducted, which enabled us to compare images before and after the impact.
- The SCI operation was conducted on April 14-16. The spacecraft reached the bottom altitude of approximately 500 m and released the SCI on 5 April 5 at 1:56 UT. The spacecraft autonomy worked perfectly as planned and followed the pre-programmed path to the backside of the asteroid from the impact point to avoid the ejecta and debris of the SCI ignition and impact. On its way of escaping, the Hayabusa-2 released a deployable camera called “DCAM3” (Figure 35 bottom-left) at 2:14 UT, which successfully observed the impact event (Figure 46). The impact occurred on 5 April 5 at 2:37 UT.
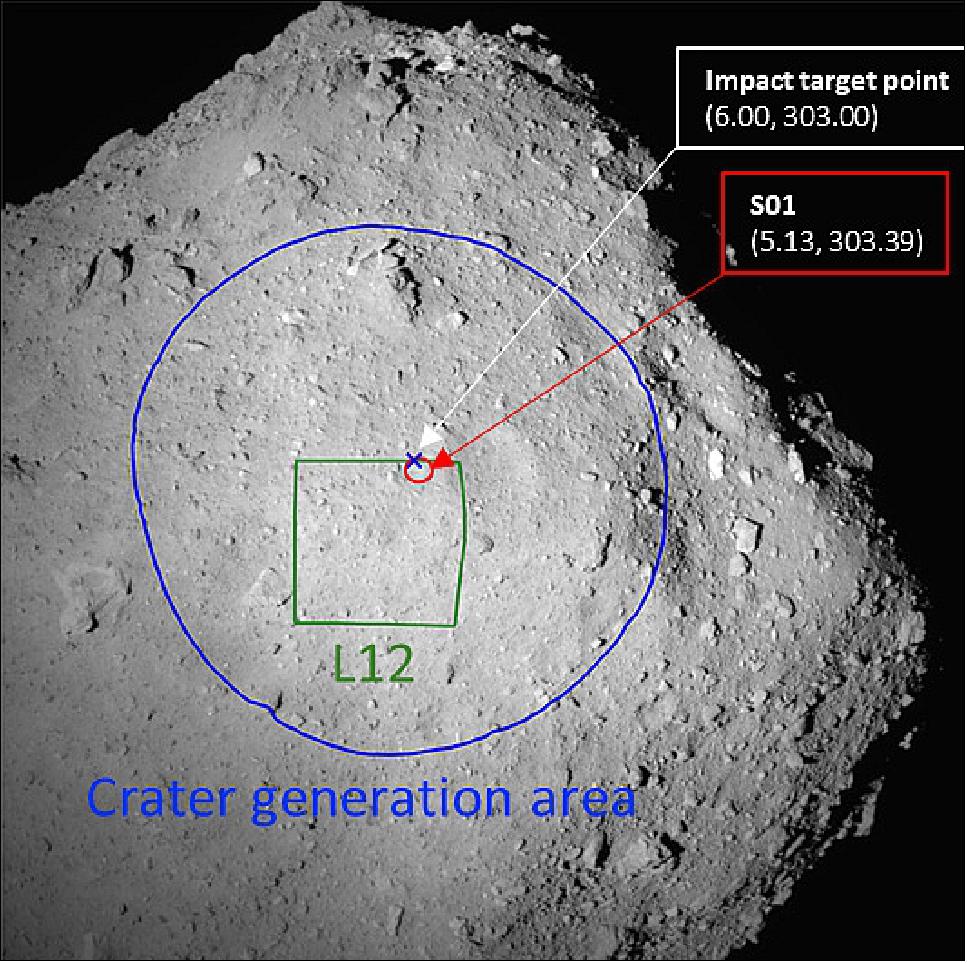
- As the result of the CRA2 operation conducted on April 13-16, the artificial crater generated by SCI was found (Figure 47). The diameter of the crater was measured to be 13 m, and was located approximately 25 m off from the aim point, which is far better targeting accuracy than anticipated. The SCI crater was then nicknamed “Omusubi-Kororin (meaning “rolling rice ball” from a Japanese fairly tail).
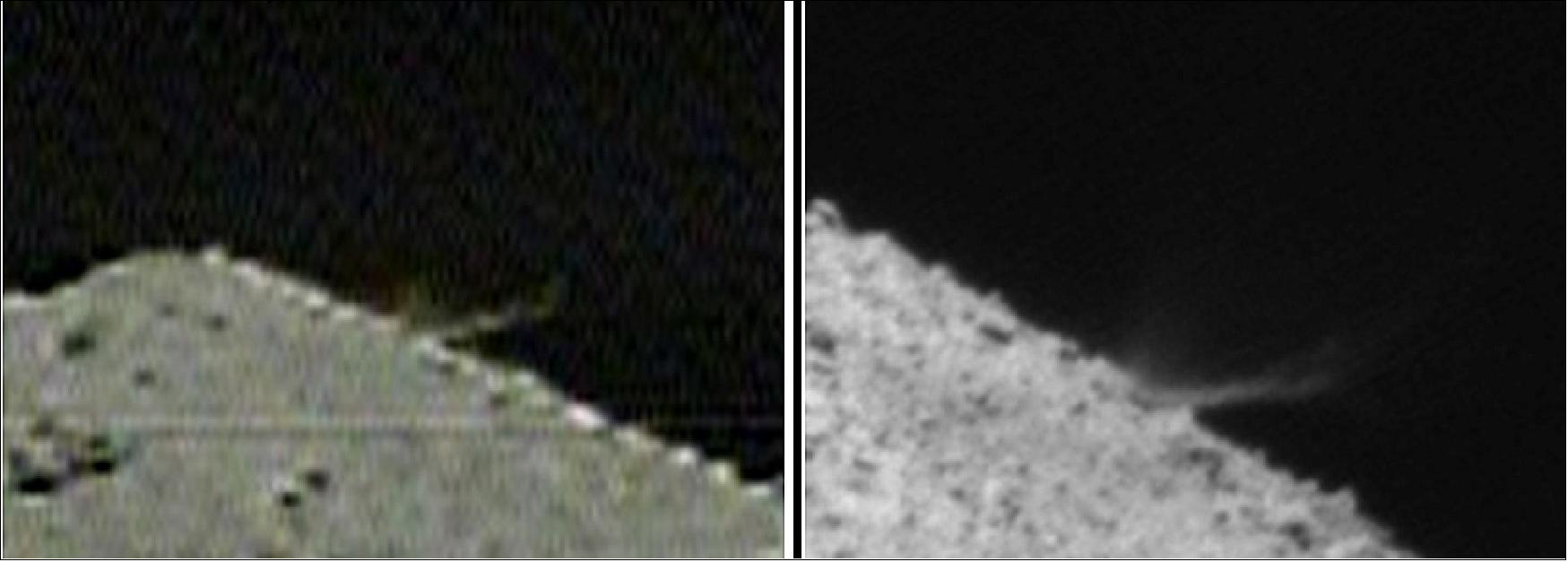
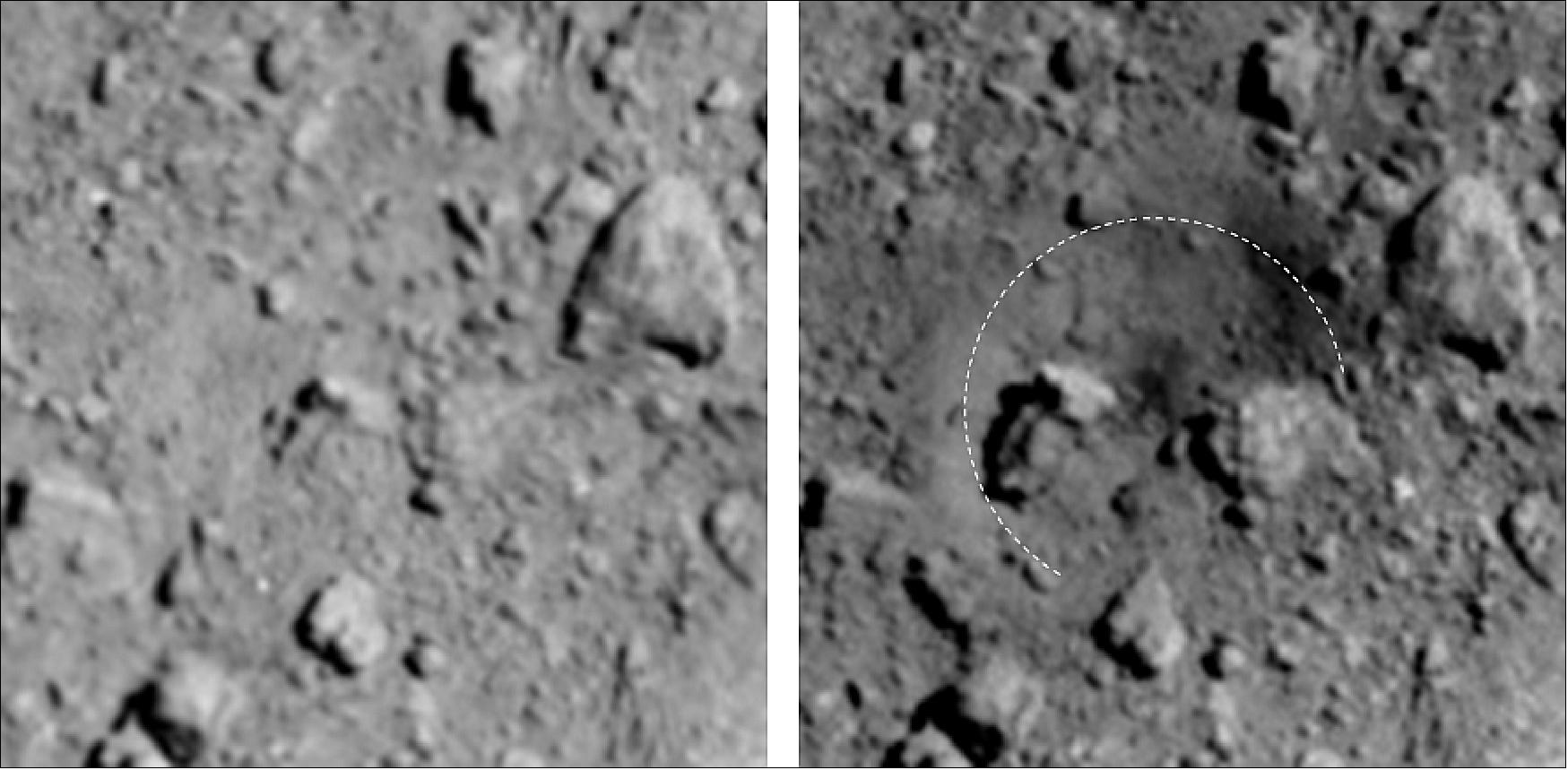
- Second Touchdown and Sampling Operation: The objective of the second touchdown (codenamed as PPTD) is to sample subsurface material exposed by the kinetic impact. By evaluating images from the CRA2 operation, and by applying the same landability condition as the TD1-L08E1 operation, as many as 11 touchdown candidate sites with wider than 6 m diameter flat region were found within 30 m from the crater. On the other hand, a scientific evaluation revealed that the ejecta deposit distribution is thick in the North of the crater and very faint in the South (Figure 48). Hence the project chose C01-Cb site which is closest among the sites located North to the crater. C01-Cb spans 7 m in diameter and is located 20 m distant from the center of the SCI crater.
- Prior to PPTD, three rehearsal descents were conducted for the purpose of landing site survey and operation practice. In the second rehearsal descent (designated as PPTD-TM1A), a TM was dropped in the C01-Cb site. The operation was successful, and the TM was placed within the C01-Cb region, just 2.6 m off from the center (Figure 49). The project team decided to use this TM for PPTD, and to aim at the center of C01-Cb for landing.
- The spacecraft suffered degradation in two optical instruments ONC-W1 and LRF in the TD1-L08E1 operation. These two instruments play critical role in the low altitude autonomous touchdown sequence. Due to a dynamic reaction from the surface soil in the TD1-L08E1 operation (as seen in Figure 43), optical lenses have been covered by dust and the sensitivity was reduced by approximately 70%. To compensate for this optical degradation, the altitude for entering the full-autonomous mode was lowered to 30 m from the original 45 m. This required better guidance accuracy above 30 m to appropriately “lock” the TM by the onboard camera with narrower FOV coverage, and also finer altitude control precision below 30 m to guarantee collision-safe maneuver against closer terrain.
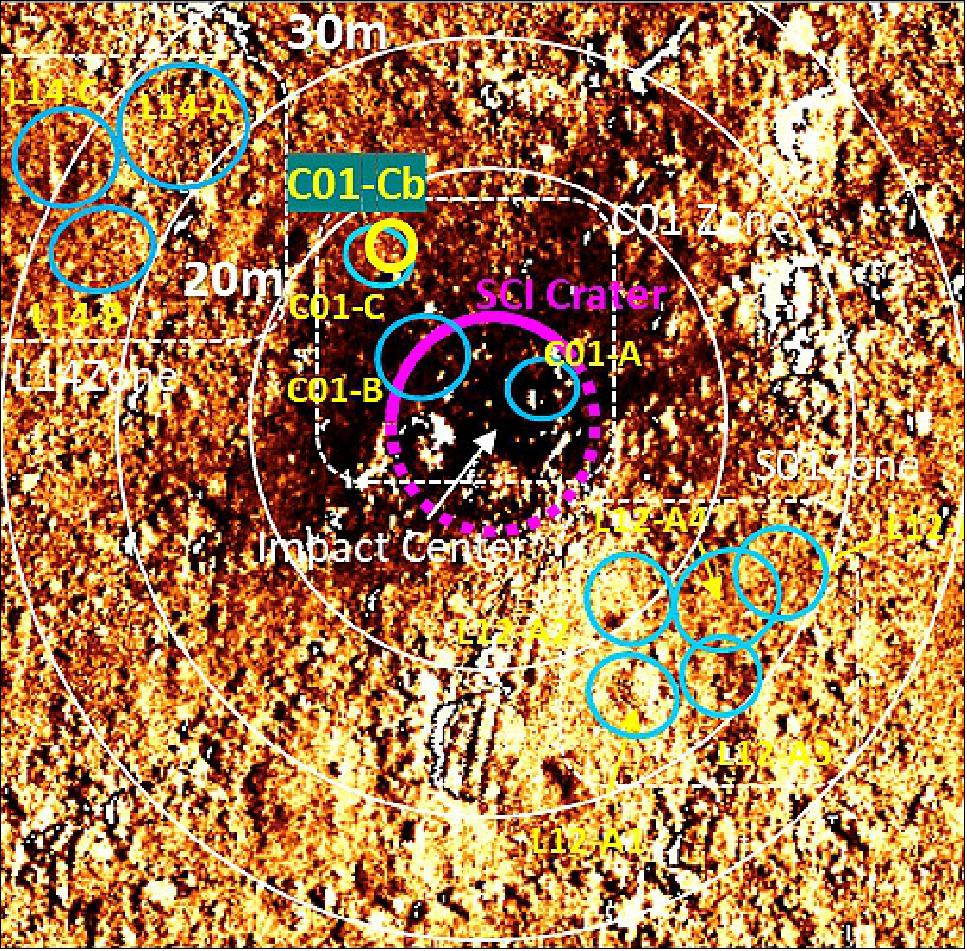
- The spacecraft left HP at the descent rate of 0.4m/s on July 10, 2019. The descent rate was reduced to 0.1 m/s at the altitude of 5 km a half day later. The project gave “Go” for the full-autonomous mode on 11 July 11 at 00:12 UT. The spacecraft reached 30 m at 00:41 UT and successfully locked the TM with ONC-W1. The all autonomous sequence proceeded perfectly as planned, and the touchdown to the ground occurred on 11 July at 01:06:18 UT. The sample container room C was used in PPTD, which was closed after we confirmed the successful touchdown at 5:10 UT on 11 July 2019.
- The post-operation analysis revealed that the landing accuracy for PPTD was 0.6 m (Figure 50). The landing site C01-Cb was then nicknamed “Uchideno-kozuchi” (meaning “Treasure Hummer”) by the Hayabusa-2 project team.
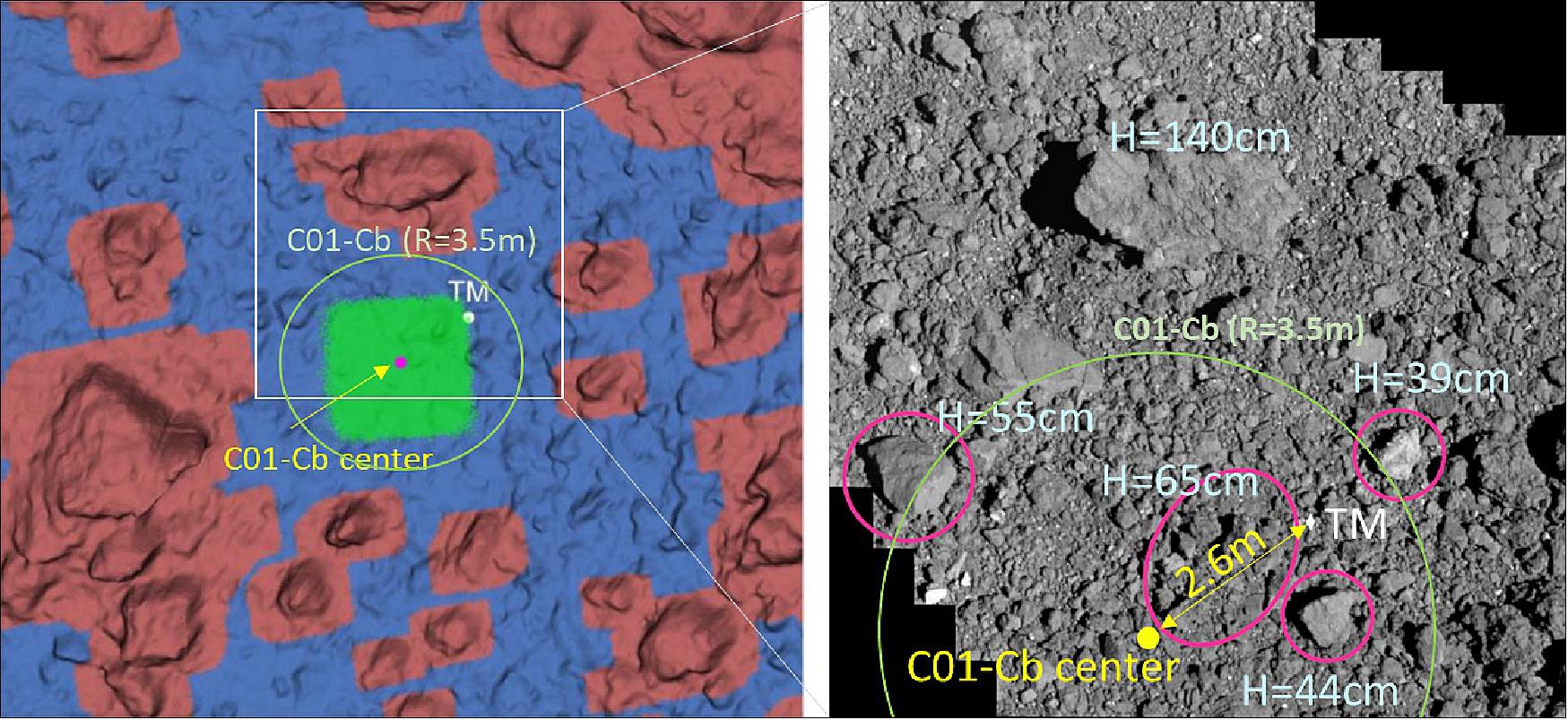
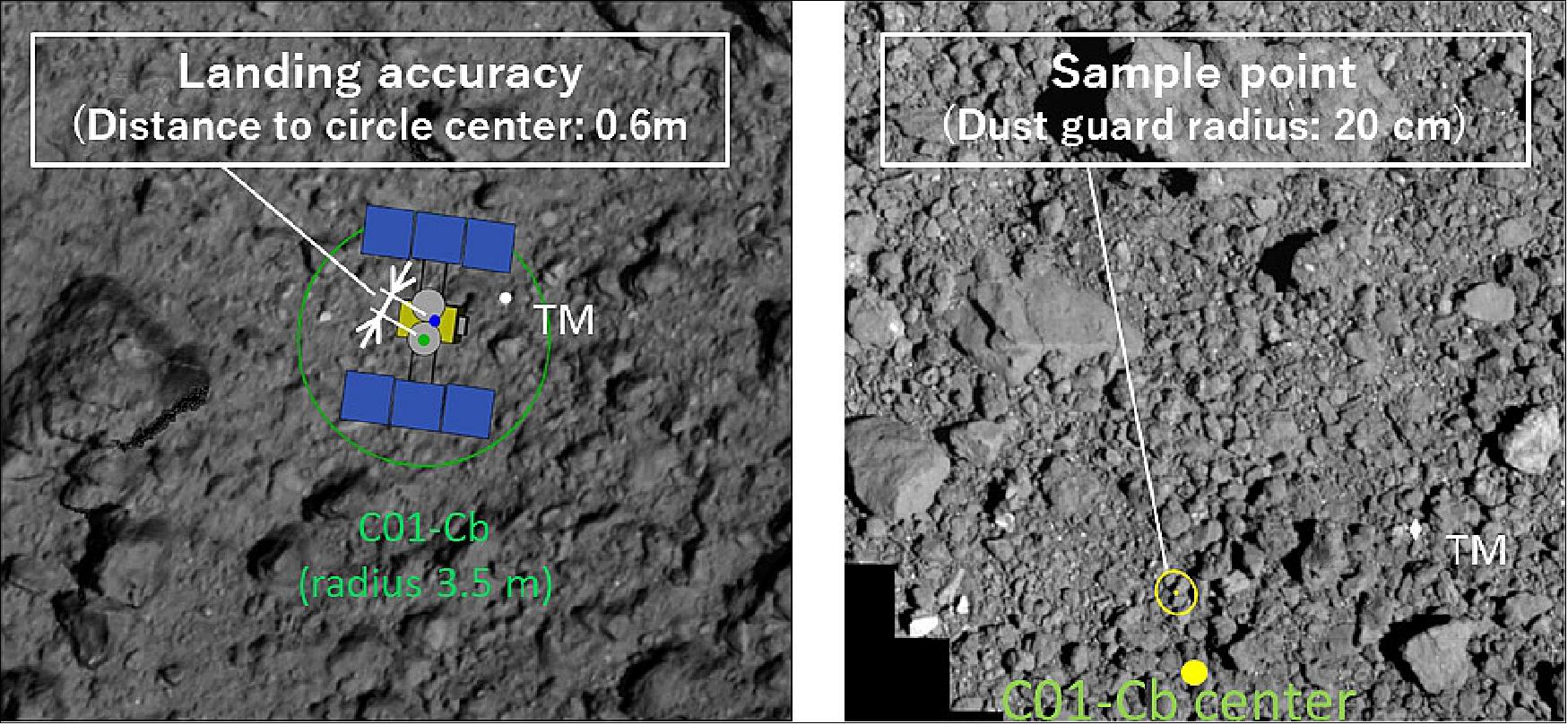
- Target Markers/MINERVA-II-2 Orbiting Operation: Two more semi-critical operations were conducted after PPTD. One is the Target Markers (TMs) orbiting operation (TM-ORB), in which the two TMs were released from the spacecraft at the terrain altitude of 1 km with fine-tuned velocity. The TM-ORB operation was planned to provide an additional contribution to the gravity science, and was also prepared as a rehearsal for the following MINERVA-II-2 orbiting operation. The first TM was inserted onto an equatorial orbit at 16:17:40 UT on 16 September 16 2019, and the second TM was inserted onto a polar orbit at 16:24:20 UT on the same day. The TMs were then observed from the spacecraft holding at 20 km sub-solar point using ONC-T camera from the separation until 23 September successfully.
- The last semi-critical operation was the MINERVA-II-2 orbiting operation (MNRV-ORB), in which the MINERVA-II-2 rover, developed by Tohoku University and the Japanese University Consortium, was released from the spacecraft at the terrain altitude of 1 km onto an equatorial orbit. The main computer of the MINERVA-II-2 rover had been found to be nonfunctional, and therefore the objective of the mission was changed to more focus on the behavior of the rover from separation until landing rather than post-landing activity. The separation occurred at 15:57:20 UT on 2 October 2019 and the orbiting MINERVA-II-2 rover was observed from the spacecraft’s ONC-T/ONC-W1 camera at the altitude of 8-10 km from the separation until 8 October. The radio link between Hayabusa-2 and MINERVA-II-2 was also confirmed. These measurements are to be also used for the gravity science.
- In summary, Hayabusa-2 arrived at an unexplored C-type asteroid Ryugu, and conducted all the planned missions successfully. Fundamental scientific questions about Ryugu have been answered through successful scientific activities, and more fundamental questions have been raised. From the engineering point of view, during one and a half year of the Ryugu-proximity phase, Hayabusa-2 has achieved seven “world’s firsts”, that are (1) mobile activity of rovers on small body, (2) multiple rover deployment on a small body, (3) 60 cm-accuracy landing and sampling, (4) artificial crater forming and observation of impact process, (5) multiple landing on extra-terrestrial planet, (6) subsurface material sampling, (7) Smallest-object constellation around extra-terrestrial planet. Hayabusa-2 will leave Ryugu in the middle of November 2019 and is scheduled to return to Earth in November-December, 2020.
• July 15, 2019: Ryugu and other asteroids of the common ‘C-class’ consist of more porous material than was previously thought. Small fragments of their material are therefore too fragile to survive entry into the atmosphere in the event of a collision with Earth. This has revealed the long-suspected cause of the deficit of this meteorite type in finds on Earth. Researchers at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) have come to this conclusion in a scientific paper published in the journal Nature Astronomy. The results are based on high-resolution measurements of the surface temperature with the DLR radiometer MARA on board the German-French Mobile Asteroid Surface Scout (MASCOT) lander. On 3 October 2018, as part of the Japanese Hayabusa-2 mission, MASCOT descended onto the almost 1 km diameter asteroid Ryugu and sent spectacular images and physical measurements from the surface back to Earth. 43) 44)
- “Ryugu surprised us,” says Matthias Grott, Principal Investigator for the MARA radiometer experiment at the DLR Institute of Planetary Research in Berlin and lead author of the study. “On the asteroid, we observed only larger fragments that are highly porous and probably very fragile.” Earlier telescopic infrared light curves of such carbon-rich asteroids acquired from Earth had been interpreted by researchers studying their thermal properties as bodies covered in sand- to pebble-sized particles. In total, 21 DLR scientists from institutes in Berlin, Bremen and Cologne participated in the study, together with international partners. “MASCOT has brought together DLR’s broad range of expertise in space research – from design, development and testing to experience in the scientific exploration of the Solar System,” says Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology. “The first published results are impressive proof of this.”
Atmospheric Protection
- Until now, only a few chondritic meteorites found on Earth have been identified as fragments of C-type asteroids, which are very common in the Solar System ('C' is the chemical symbol for the element carbon). Chondrules are small, millimeter-sized rock globules that formed in the solar nebula 4.5 billion years ago and are considered to be the basic building blocks of planet formation. "We can now confirm that fragments of these asteroids are very likely to break up further when they enter Earth’s atmosphere, and then usually burn up completely. This means that only the largest fragments reach the Earth’s surface,” explains Grott. “That is why meteorites from this type of asteroid are so rarely found on Earth.”
- The good news is that, because of this, Earth’s atmosphere offers increased protection from C-type asteroids, which account for 75 percent of all asteroids. Ryugu is a C-class asteroid, a carbon-rich representative of the oldest bodies in the 4.5 billion-year-old Solar System, and thus a building block of planet formation. It is one of the oldest of the 17,000 asteroids with orbits known to intersect that of Earth. However, further research is necessary to determine the maximum asteroid size for which this atmospheric protection is effective.
- The international research team led by Matthias Grott determined the increase and decrease of the surface temperature over the course of the asteroid’s roughly seven-and-a-half-hour diurnal cycle. This was accomplished by measuring the infrared radiation emitted by the surface during the day and at night, using the MARA radiometer. The MARA measurements made it possible to infer the thermal properties and density of the material. The data from MASCOT were transmitted to the Japanese Hayabusa-2 spacecraft. The craft was located at an observing position 3 km above the asteroid’s surface. From there, MASCOT sent all measurement and operational data to Earth.
- MASCOT landed on asteroid Ryugu on 3 October 2018 by free falling at walking pace. Six minutes after separating from Hayabusa-2 at an altitude of 42 m, the lander touched down on the asteroid’s surface having followed a ballistic trajectory. MASCOT bounced back up several meters, before the 10 kg experiment package finally came to rest. A rotating swing arm allowed MASCOT to turn to the 'correct' side and ‘hop’ across the surface. In total, MASCOT was active on Ryugu for 17 hours, one hour longer than anticipated.
- The gravitational attraction of Ryugu is 66,500 times weaker than that of Earth, so the small amount of momentum produced by the arm was sufficient. This technical innovation for an unconventional form of mobility on an asteroid surface was used for the first time in the history of space exploration as part of the Hayabusa-2 mission. The Hayabusa-2 mission on Ryugu will continue until the end of 2019, with the goal of returning samples of the asteroid material to Earth by 2020. On 11 July, Hayabusa-2 successfully completed the second touchdown operation on the asteroid.
Hayabusa-2 Mission and MASCOT
- Hayabusa-2 is a Japanese space agency (Japan Aerospace Exploration Agency; JAXA) mission to the near-Earth asteroid Ryugu. The German-French lander MASCOT carried on board Hayabusa-2 was developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in close cooperation with the French space agency CNES (Centre National d’Etudes Spatiales). The scientific experiments on board MASCOT were devised by DLR, the Institut d’Astrophysique Spatiale and the Technical University of Braunschweig. The MASCOT lander and its experiments are operated and controlled by DLR with support from CNES and in constant interaction with the Hayabusa-2 team.
- The DLR Institute of Space Systems in Bremen was responsible for developing and testing the lander together with CNES. The DLR Institute of Composite Structures and Adaptive Systems in Braunschweig was responsible for the stable structure of the lander. The DLR Robotics and Mechatronics Center in Oberpfaffenhofen developed the swing arm that allowed MASCOT to hop on the asteroid. The DLR Institute of Planetary Research in Berlin contributed the MASCAM camera and the MARA radiometer. The asteroid lander was monitored and operated from the MASCOT Control Center in the Microgravity User Support Center (MUSC) at the DLR site in Cologne.
• July 11, 2019: Japan's Hayabusa-2 probe made a "perfect" touchdown Thursday on a distant asteroid, collecting samples from beneath the surface in an unprecedented mission that could shed light on the origins of the solar system. "We've collected a part of the solar system's history," project manager Yuichi Tsuda said at a jubilant press conference hours after the successful landing was confirmed. "We have never gathered sub-surface material from a celestial body further away than the Moon," he added. "We did it and we succeeded in a world first." 45)
- The fridge-sized probe made its second landing on the asteroid around 10:30 am (01:30 GMT), with officials from JAXA (Japan Aerospace Exploration Agency) breaking into applause and cheers as initial data suggested the touchdown had been a success.
- Confirmation of the landing came only after Hayabusa2 lifted back up from the asteroid and resumed communications with the control room.
- Research director Takashi Kubota told reporters that the touchdown operation was "more than perfect." - And Tsuda, with a grin, said he rated it "1000 points out of 100."
- "The probe moved perfectly and the team's preparation work was perfect," he said.

Pristine Samples
- The brief landing Thursday is the second time Hayabusa2 has touched down on the desolate asteroid Ryugu, some 300 million km from Earth.
- Ryugu, which means "Dragon Palace" in Japanese, refers to a castle at the bottom of the ocean in an ancient Japanese tale.
- The complex multi-year Hayabusa-2 mission has also involved sending rovers and robots down to the surface.
- Thursday's touchdown was intended to collect pristine materials from beneath the surface of the asteroid that could provide insights into what the solar system was like at its birth, some 4.6 billion years ago.
- To get at those crucial materials, in April an "impactor" was fired from Hayabusa-2 towards Ryugu in a risky process that created a crater on the asteroid's surface and stirred up material that had not previously been exposed to the atmosphere.
- Hayabusa-2's first touchdown was in February, when it landed briefly on Ryugu and fired a bullet into the surface to puff up dust for collection, before blasting back to its holding position.
- The second touchdown required special preparations because any problems could mean the probe would lose the precious materials already gathered during its first landing.
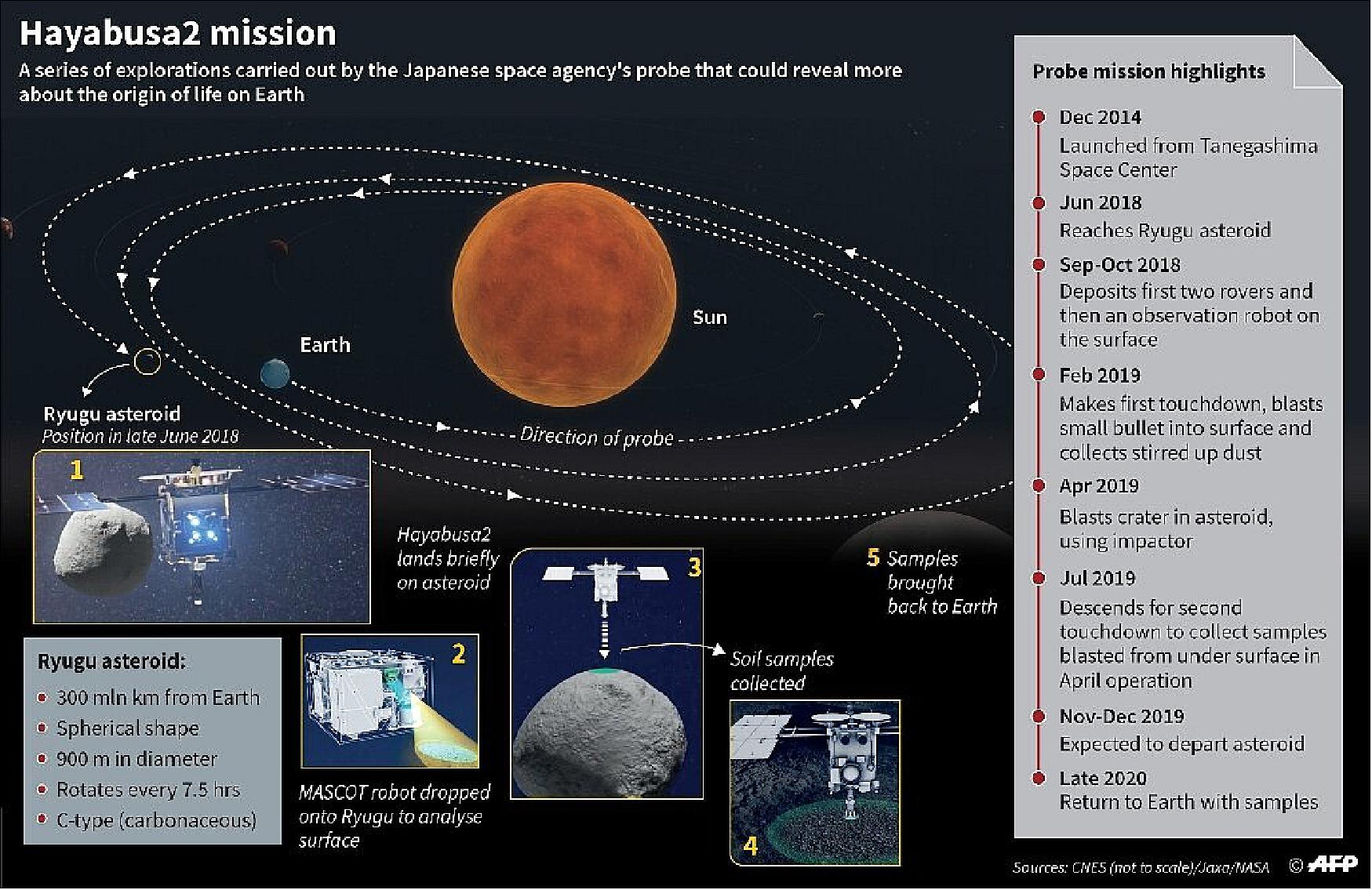
• On 11 July 2019, the Hayabusa-2 spacecraft performed a 2nd touchdown on the surface of asteroid Ryugu. The touchdown occurred at 10:06 JST (Japan Standard Time) at the onboard time and was successful. Samples of asteroid Ryugu were collected. Below we show images taken before and after the touchdown. As this is a quick bulletin, more detailed information will be given in the future. 46)
- Images were acquired with ONC-W1 (Optical Navigation Camera – Wide angle). Immediately after touchdown, we captured images with the ONC-W1. Here are two bulletin images from this camera.
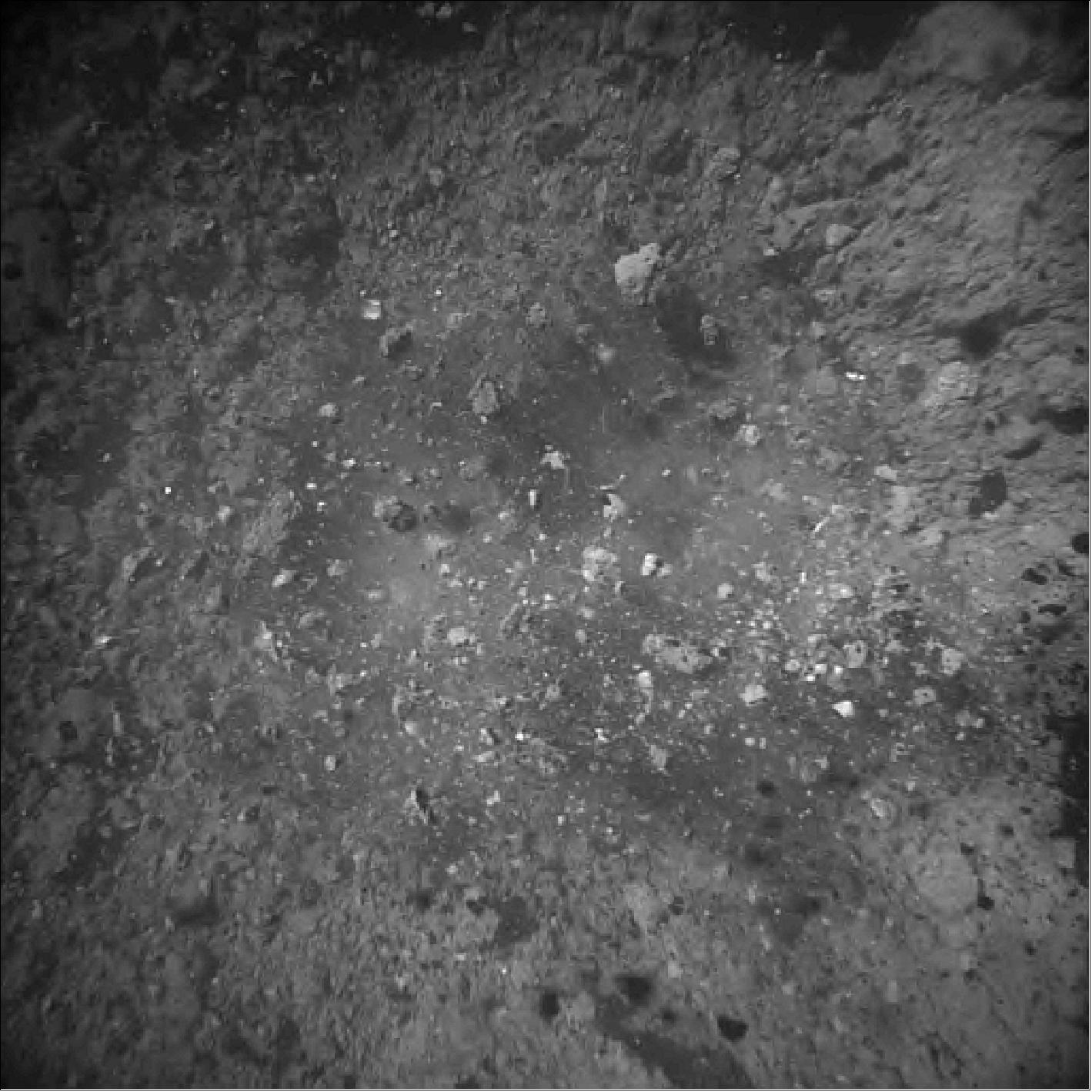
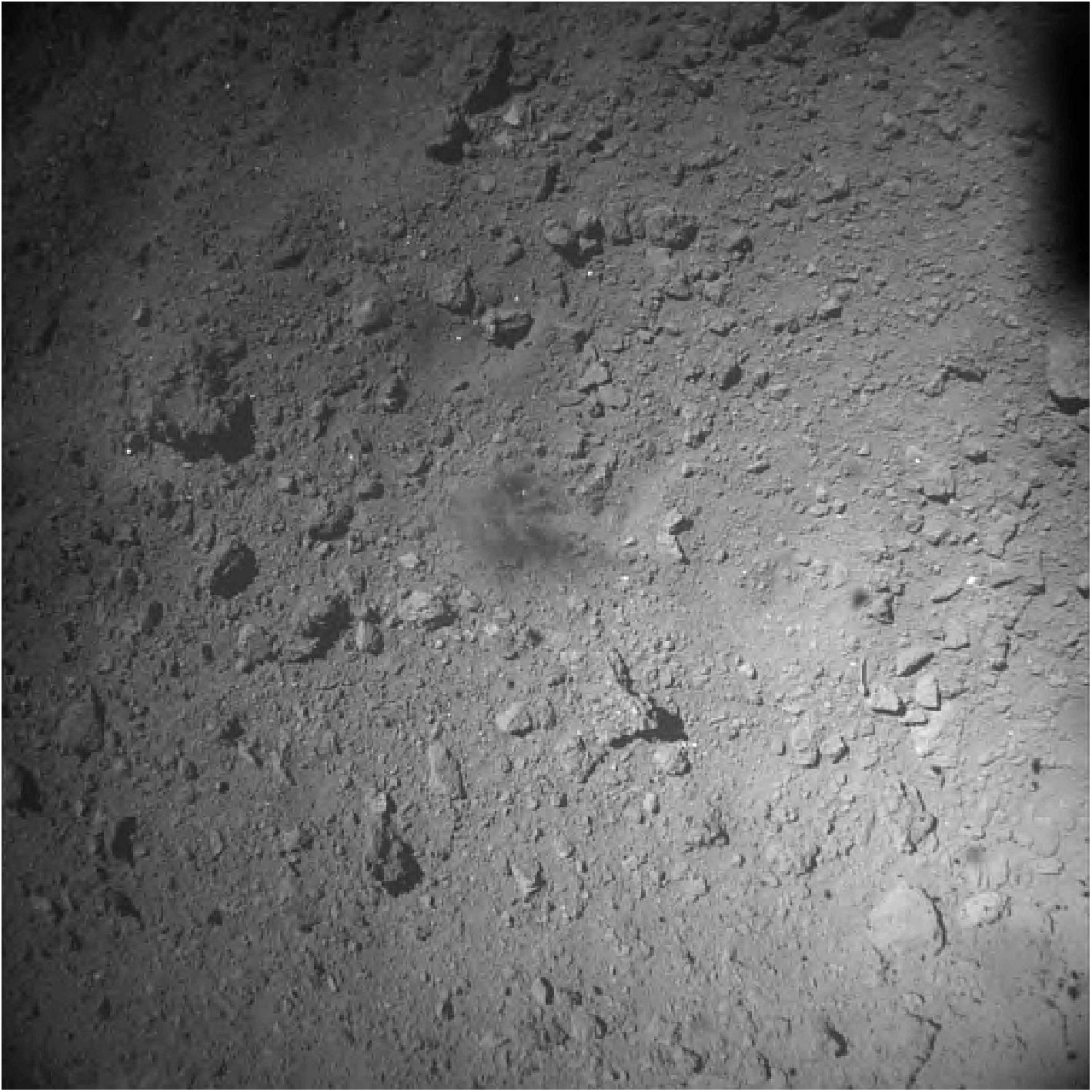
The following images were taken with CAM-H (Small Monitor Camera-Head). CAM-H operated before and after touchdown, capturing images 4 seconds before touchdown, the moment of touchdown and 4 seconds after touchdown. (CAM-H is the camera that was developed and installed on Hayabusa-2 through public donations. The field of view is downwards beside the sampler horn.)



• April 25, 2019: JAXA separated the SCI (Small Carry-on Impactor), which had been onboard the asteroid explorer Hayabusa-2, on April 5, 2019, for deployment to Ryugu, and then put the SCI into operation. 47) — Hayabusa-2 is operating nominally.
- As a result of checking the images captured by the Optical Navigation Camera - Telescopic (ONC-T) onboard the asteroid explorer Hayabusa-2, we have concluded that a crater was created by the SCI.
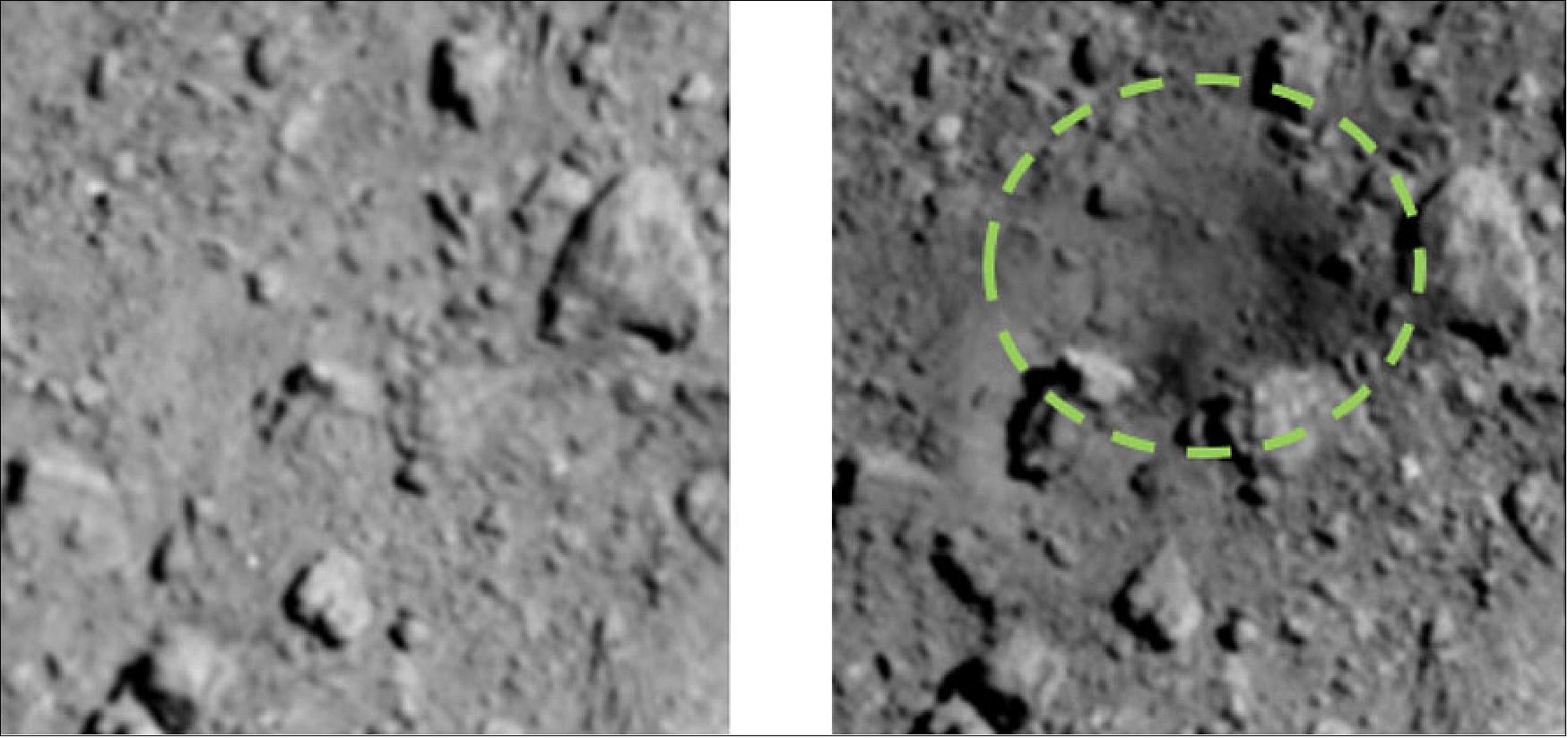
• On 5 April 2019, JAXA separated the SCI (Small Carry-on Impactor) onboard the asteroid explorer of Hayabusa-2 for deployment to Ryugu and put the SCI into operation. 48) 49)
- After the start of the operation, the camera (DCAM3) separated from Hayabusa-2 captured an image that shows ejection from Ryugu’s surface, which implies that the SCI had functioned as planned. The SCI was released from the spacecraft, carrying a plastic explosive charge that shot a 2.5 kg copper projectile at the surface of the 900 m diameter Ryugu asteroid at a velocity of around 2 km/s. The objective is to uncover subsurface material to be brought back to Earth for detailed analysis.
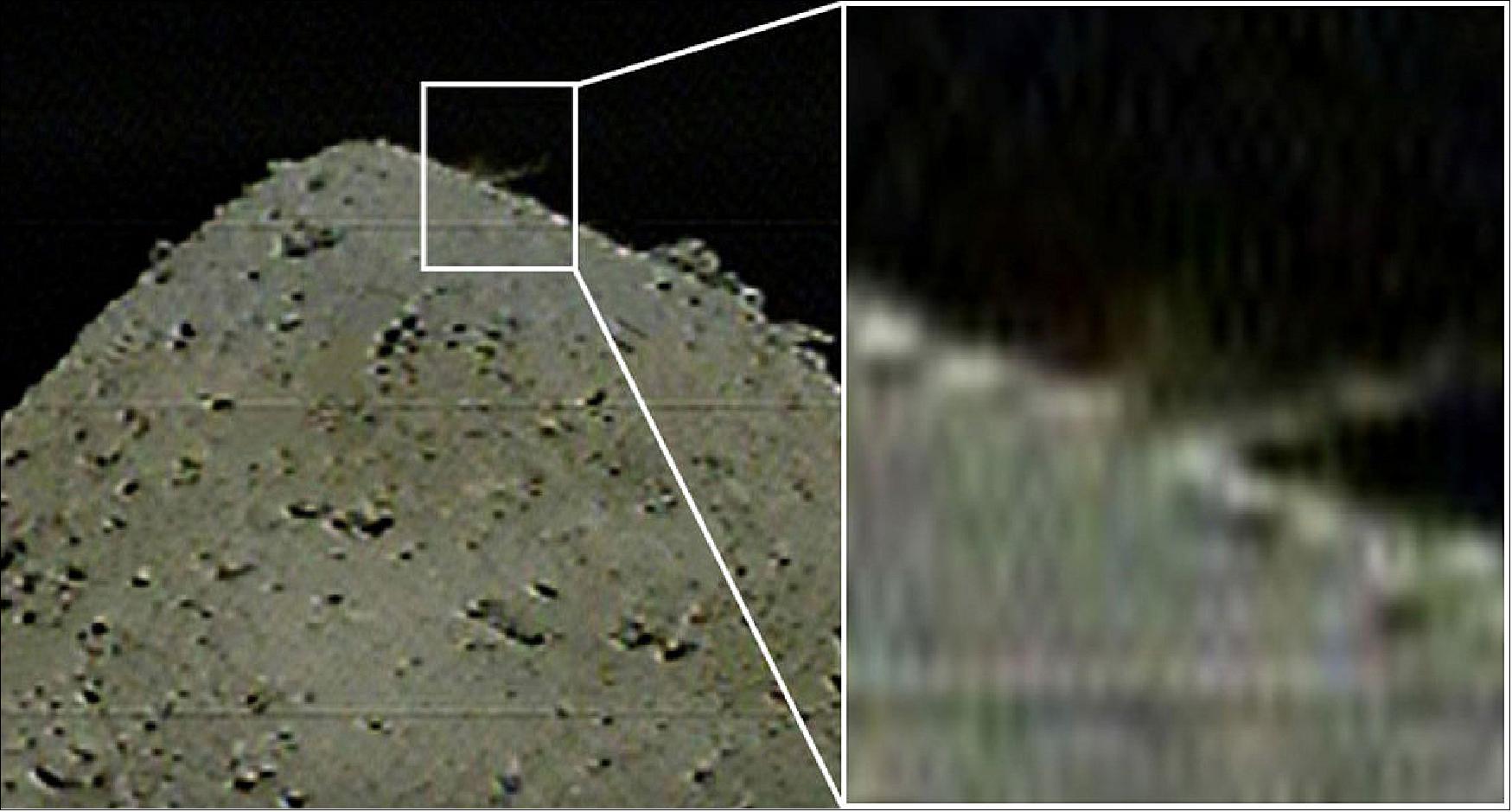
• March 19,2019: The first data received from the Hayabusa-2 spacecraft in orbit of asteroid Ryugu helps space scientists explore conditions in the early solar system. The space probe gathered vast amounts of images and other data which gives researchers clues about Ryugu's history, such as how it may have formed from a larger parent body. These details in turn allow researchers to better estimate quantities and types of materials essential for life that were present as Earth formed. 50) 51)
- "The ground shook. My heart pounded. The clock counted. 3... 2... 1... Liftoff!" regaled Professor Seiji Sugita of the University of Tokyo's Department of Earth and Planetary Science. "I've never felt so excited and nervous at the same time, that wasn't just another science experiment on top of that rocket. That was the culmination of my life's work and the hopes and dreams of my entire team."
- On Wednesday, 3rd December 2014, an orange and white rocket over 50m tall weighing almost 300 tons launched from Tanegashima Space Center in South West Japan and successfully sent the Hayabusa2 spacecraft hurtling into space. Its carefully calculated trajectory swung Hayabusa2 round the Earth to pick up speed so it could reach its destination in the asteroid belt between Mars and Jupiter. The target was the asteroid Ryugu and Hayabusa2 arrived on schedule on Wednesday 27 June 2018.
- Since then the spacecraft has used a wide range of cameras and instruments to collect images and data about Ryugu which it continually sends to researchers back on Earth. It has even made a brief soft landing in preparation for a second where it will collect loose surface material — regolith — to return to Earth. We'll have to wait until 2020 before that sample returns, but researchers are far from idle in the meantime.
- "Just a few months after we received the first data we have already made some tantalizing discoveries," said Sugita. "The primary one being the amount of water, or lack of it, Ryugu seems to possess. It's far dryer than we expected, and given Ryugu is quite young (by asteroid standards) at around 100 million years old, this suggests its parent body was much largely devoid of water too."
- According to colleagues of Sugita writing in a companion paper, various instruments on Hayabusa2 including a visible-light camera and a near-infrared spectrometer confirm the lack of water. This fact is important as it's thought all of Earth's water, including that comprising 70% of you, came from local asteroids, distant comets and the nebula or dust cloud that became our sun. The presence of dry asteroids in the asteroid belt would change models used to describe the chemical composition of the early solar system. But why does this matter?
- "Life," explained Sugita. "This has implications for finding life. There are uncountably many solar systems out there and the search for life beyond ours needs direction. Our findings can refine models that could help limit which kinds of solar systems the search for life should target."
- But there's more to this than water; other compounds crucial to life exist in asteroids and Ryugu has some surprises here too. To understand why, it's important to know that Hayabusa-2 is not the only terrestrial robot out there exploring asteroids right now. In 2016 NASA launched OSIRIS-REx which arrived at its target asteroid Bennu on 3 December 2018, four years to the day from the launch of Hayabusa-2.
- The two projects are not in competition but actively share information and data which could help one another. Researchers compare their asteroids to learn even more than would be possible if they could only probe one. Although alike in most ways, Bennu and Ryugu differ significantly in some areas. They are both extremely dark, have spinning-top-like shapes and are covered in large boulders, but Ryugu contains far less water. This discrepancy has researchers scratching their heads.
- "I hoped the surface of Ryugu had more variety as previous ground-based observations had suggested. But every surface feature and boulder on Ryugu seems to be like every other, showing the same scarcity of water," said Sugita. "However, what felt limiting is now enlightening; Ryugu's homogeneity demonstrates the capacity of our instruments to capture nuanced data. It also serves as a necessary constant to compare subsequent data against. So much of science is about controlling variables and Ryugu does this for us."
- As Hayabusa-2 continues to explore our little rocky neighbor researchers gradually piece together its history, which is entwined with our own. Sugita and his colleagues believe Ryugu comes from a parent asteroid several tens of kilometers wide, most likely in the asteroid families Polana or Eulalia.
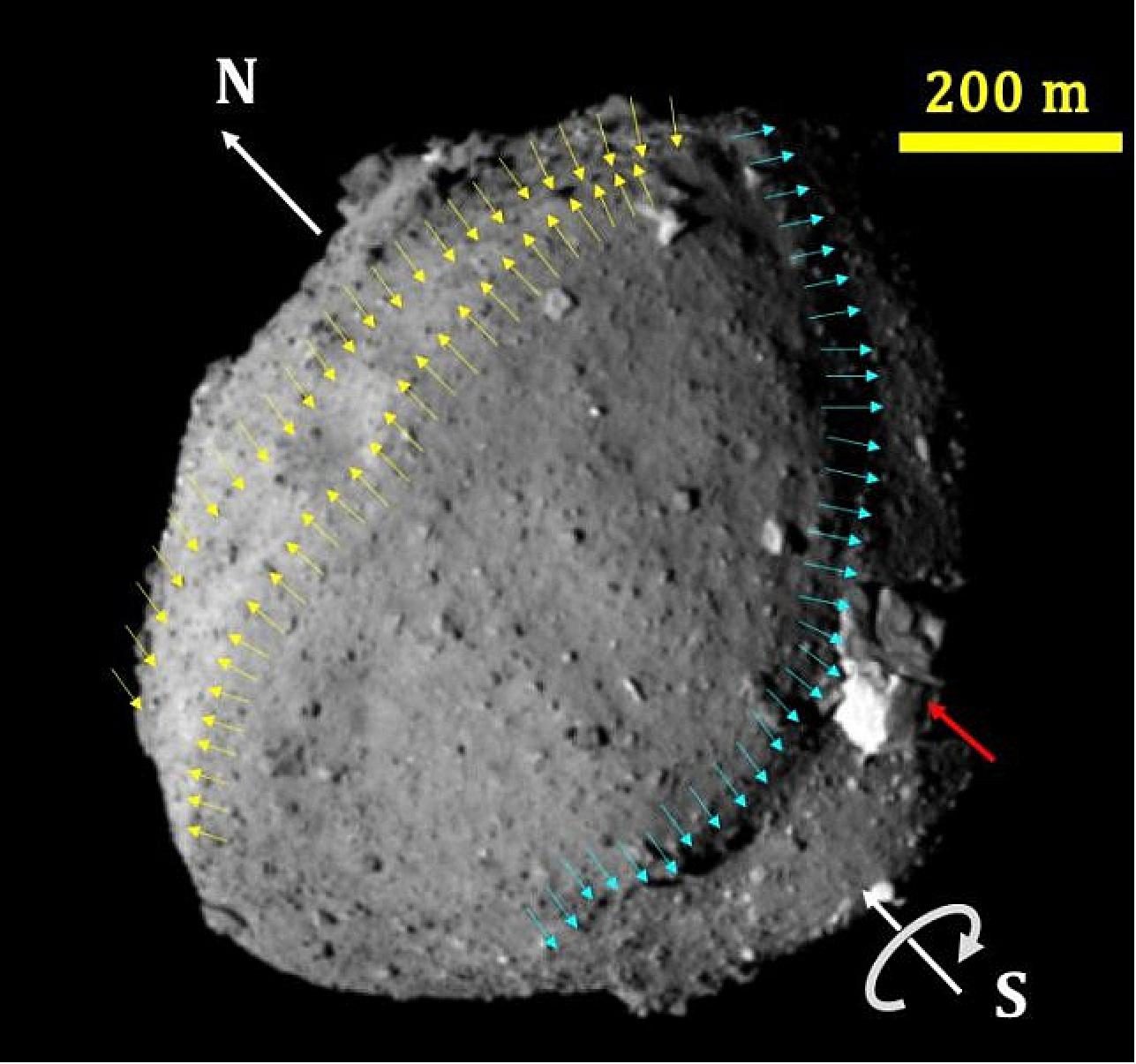
- "Thanks to the parallel missions of Hayabusa-2 and OSIRIS-REx, we can finally address the question of how these two asteroids came to be," concludes Sugita. "That Bennu and Ryugu may be siblings yet exhibit some strikingly different traits implies there must be many exciting and mysterious astronomical processes we have yet to explore."
• February 22, 2019: JAXA executed the asteroid explorer Hayabusa-2 operation to touch down the surface of the target asteroid Ryugu for sample retrieval. Data analysis from Hayabusa-2 confirms that the sequence of operation proceeded, including shooting a projectile into the asteroid to collect its sample material. The Hayabusa-2 spacecraft is in nominal state. This marks the Hayabusa-2 successful touchdown on Ryugu. 52)
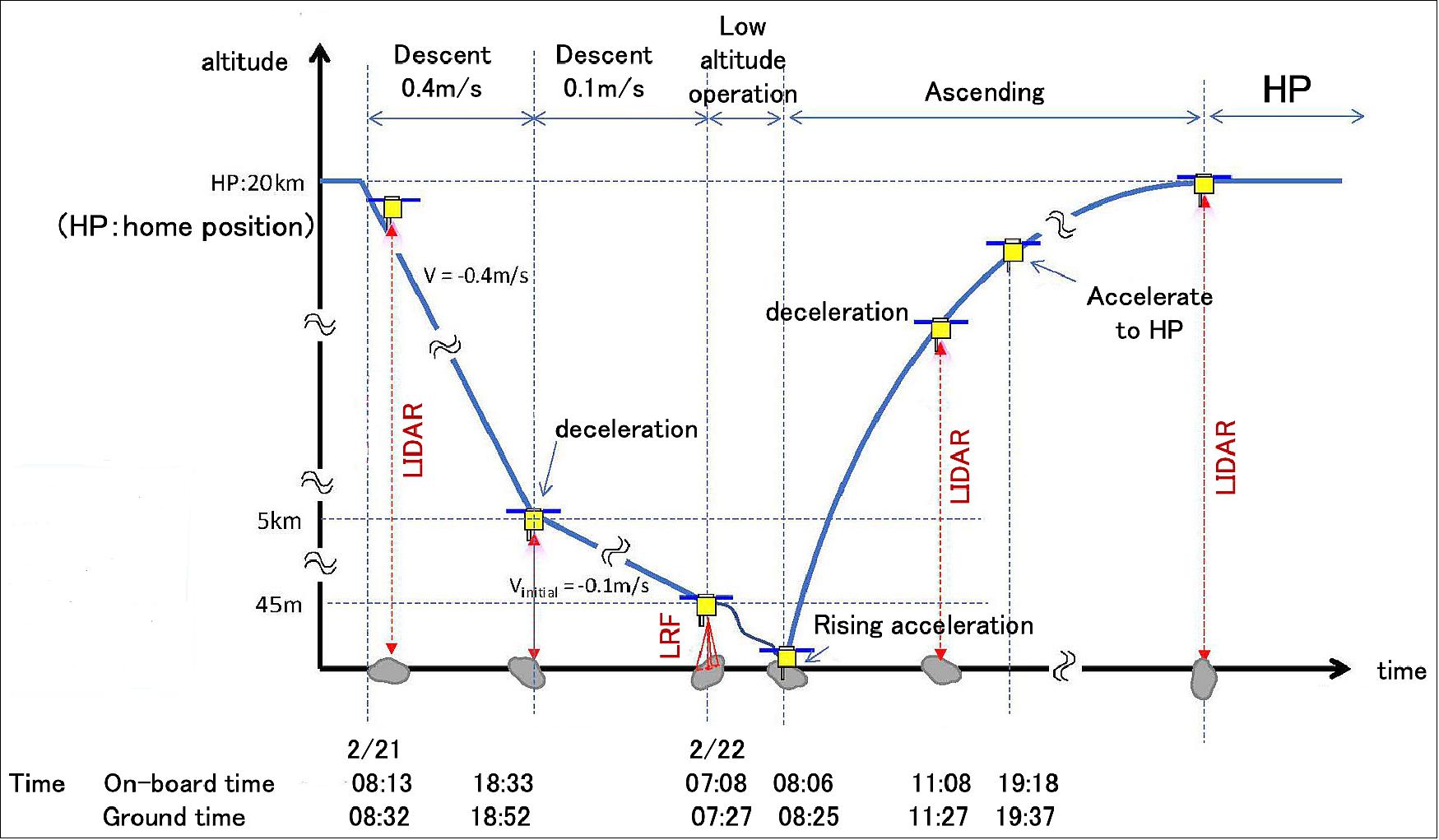
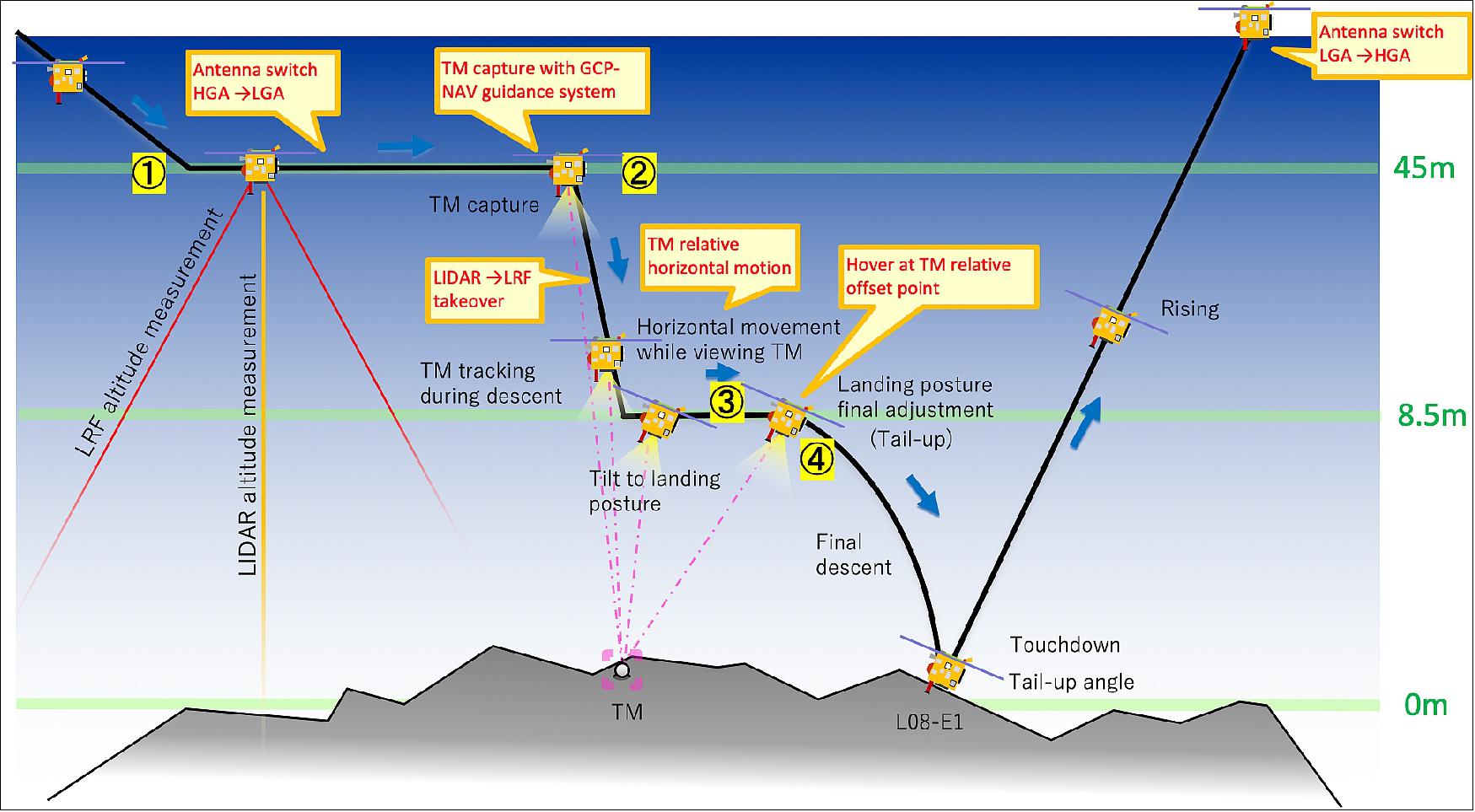
- The descent to Ryugu began on 21 February at 4:45 UTC, a delay of about 5 hours later than initially planned. The reason for the delay wasn't clear, but mission controllers made up for lost time by sending Hayabusa-2 towards Ryugu at a speed of 90 cm/s instead of 40 cm/s. Around the same time, images from the spacecraft's optical navigation cameras started coming in, and continued to do so until the spacecraft crossed beneath 200 meters shortly after 22:02 UTC. 53)
- At the 45-meter hold point, Hayabusa-2 oriented itself for landing and turned its high-gain antenna away from Earth, shutting off the flow of telemetry in the process. From there, mission controllers could only watch for Doppler shifts in the signal from Hayabusa-2's low-gain antenna, indicating the spacecraft had pushed its sample horn into Ryugu and was starting to ascend.
- That shift occurred around 22:49 UTC.
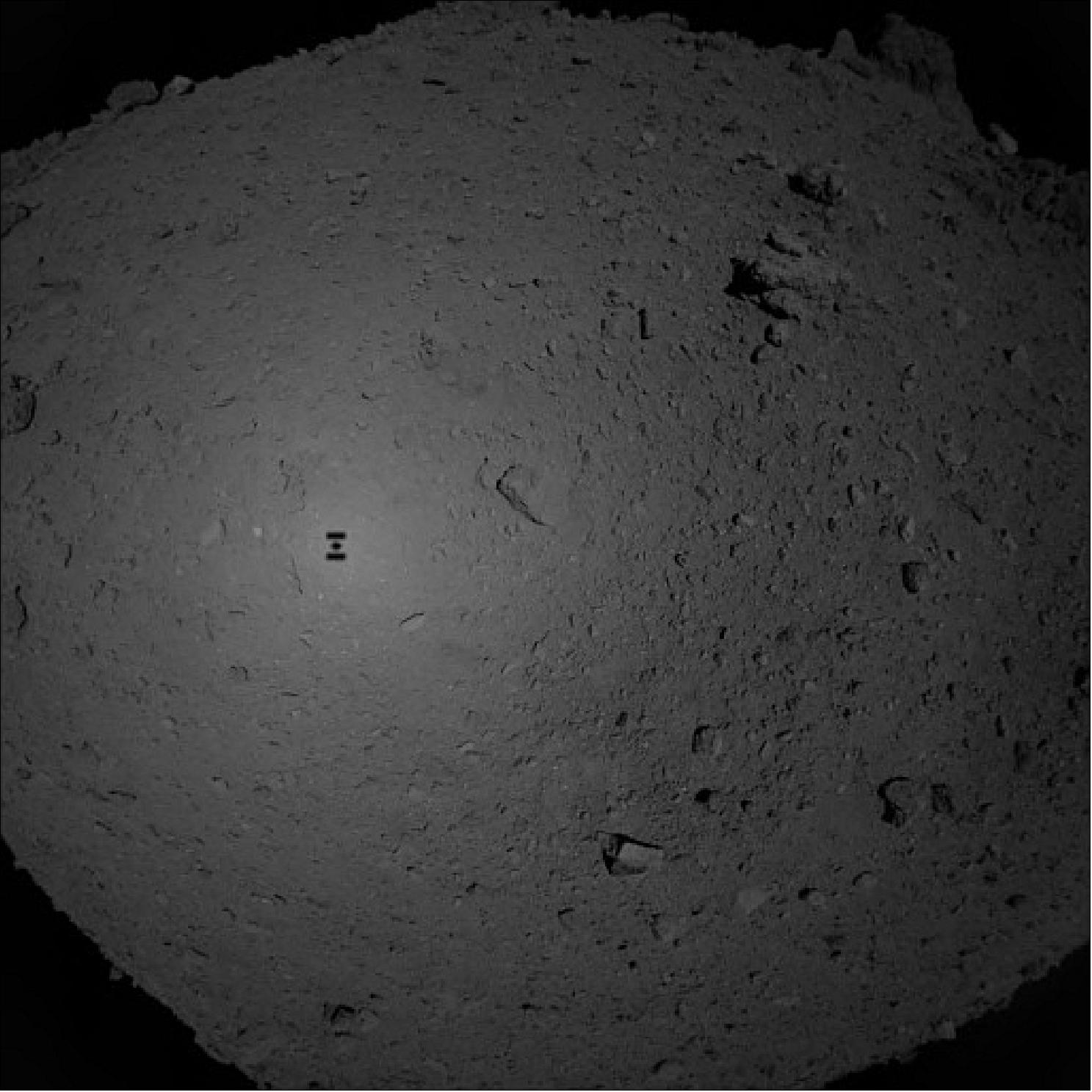
- A cheer erupted at JAXA's mission control center.
- Hayabusa-2 began to ascend, and just minutes later was able to swing its high-gain antenna back toward Earth. Mission controllers confirmed that the spacecraft was healthy and the command to fire the tantalum bullet executed as expected.
- The next step will be for JAXA to download imagery, particularly from the camera on the sample horn, and further confirm the touchdown sequence went as planned.

• February 22, 2019: Up until now, the Hayabusa-2 mission has progressed smoothly. One particular success was the landing of the small rovers on the surface of Ryugu, which could not be achieved during the first Hayabusa mission. Now on February 22, 2019, we plan to touchdown on the asteroid surface; another challenge that did not go as expected for Hayabusa. 54)
- The original schedule was planned for touchdown in late October of last year (2018). However, Ryugu was revealed as a boulder strewn landscape that extended across the entire surface, with no flat or wide-open regions. Before arriving at Ryugu, it was assumed there would be flat areas around 100 meters in size. But far than finding this, we have not even seen flat planes 30 meters across!
- During the scheduled time for touchdown in late October, we did not touchdown but descended and dropped a target marker near the intended landing site. We were able to drop the target marker in almost the planned spot and afterwards we examined the vicinity of the target marker landing site in detail. Finally, the area denoted L08-E1 was selected as the place for touchdown. L08-E1 will be described later (Figure 68), but the final area where the touchdown is planned is a region of radius 3 m within L08-E1 as shown in Figure 66.
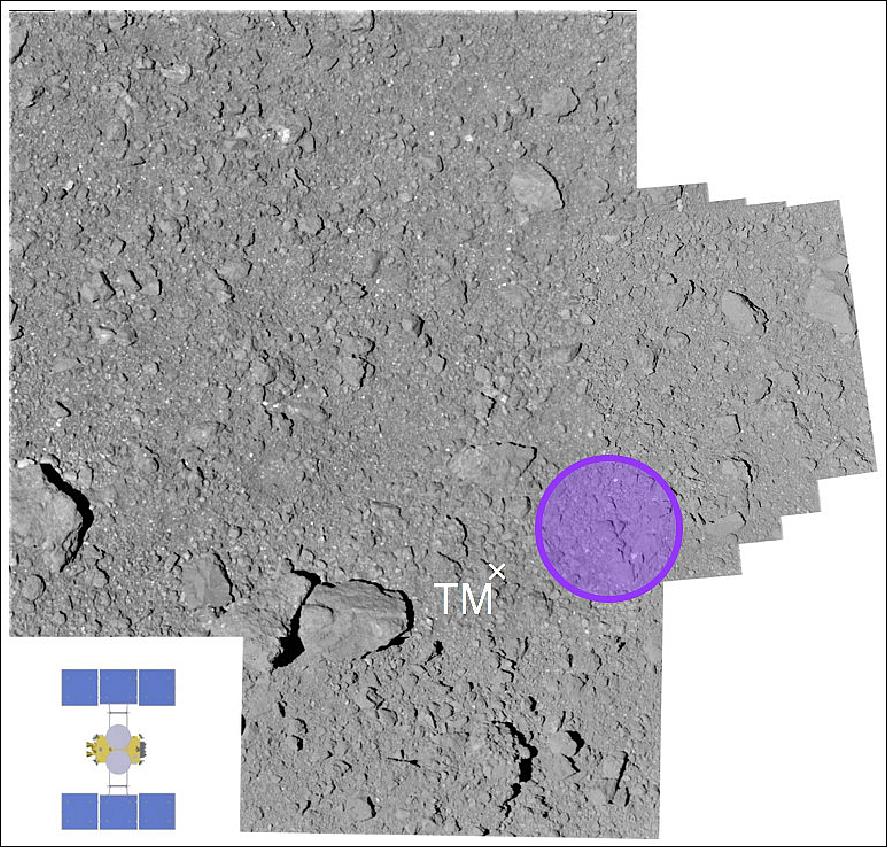
- During touchdown, the spacecraft will descend towards the center of the circle shown in Figure 66, which is located 4 or 5 m away from the target marker location. As the guidance error of the spacecraft is a maximum of 2.7 m, the spacecraft can land in a circle of radius 3 m. Although this size of the site is just barely sufficient, we will try to touchdown here.
- Prior to Hayabusa's arrival at Ryugu, the project planned to touchdown in a flat area about 100 m wide, but ultimately, we selected a region with a diameter of about 6 m (radius 3m). We were able to improve the necessary landing accuracy using a technique called “pinpoint touchdown”. Pinpoint touchdown was originally planned for touching down around the artificial crater generated with the onboard small carry-on impactor (SCI), but the environment we discovered on the asteroid surface has made this method necessary from the start.
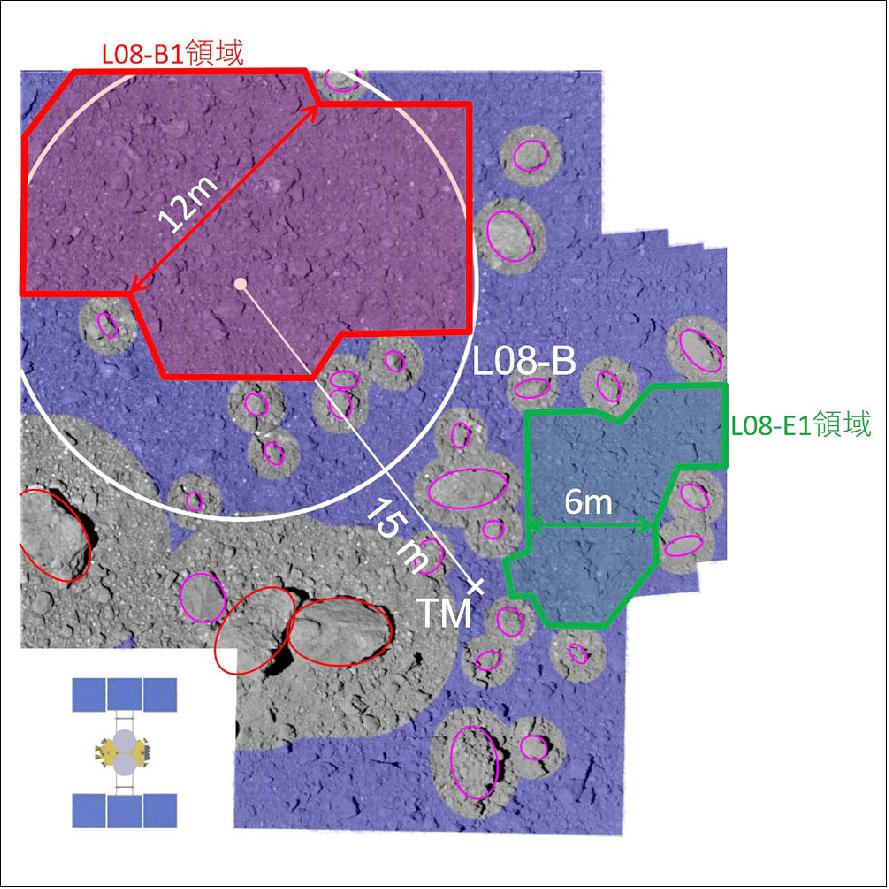
• February 18, 2019 updated: On December 28 —the last day of work in 2018— the sampler team conducted an important experiment. As a final test before touchdown (TD), the team fired an identical bullet to that onboard Hayabusa-2 into a simulated soil of the surface of Ryugu to test how much sample would be ejected. 55) 56)
- Hayabusa-2 uses a projector to inject metal bullets into the asteroid surface and release material, before passively collecting these samples through the sampler horn. This projector, including the pyrotechnic products, were manufactured with multiple flight spares (equivalent products manufactured at the same time as the flight model, Figure 69).
- The original purpose of this experiment was to confirm that one month before the TD operation, the flight spare projector was operating normally after it had been stored for a long period of four years.
- As we now know, the expected topography of a powdery fine regolith was not found on the surface of Ryugu. But cm-sized or larger gravel was observed by the MASCOT and MINERVA-II1 rovers that landed on the asteroid surface. This is quite different from the prediction before launch, so it took time to investigate the safety of the spacecraft during TD. Additionally, it was necessary to review whether sample material would still be released from the asteroid surface as originally assumed.
- Therefore, we decided to use the flight spare projector to perform an operation confirmation test, whereby we examined what happens if a bullet identical to that onboard Hayabusa2 is fired into a target that simulates the observed surface of Ryugu.
• January 21, 2019: Place names for locations on the surface of Ryugu were discussed by Division F (Planetary Systems and Bioastronomy) of the International Astronomical Union (IAU) Working Group for Planetary System Nomenclature (hereafter IAU WG) and approved in December 2018. We will introduce the place names in this article and the background to their selection. 57)
- As the appearance of Ryugu gradually became clear during the approach phase in June 2018, we used nicknames amongst the Hayabusa-2 Project team to distinguish regions of the terrain. (For example, the crater now named “Urashima” was referred to as the Death Star crater in Star Wars!) However, in order to introduce Ryugu to the world, it is necessary to have names that are intentionally recognized rather than nicknames, which can be referred to in scientific papers and other articles. Therefore, the discussion regarding naming the Ryugu surface topology began within the team.
- To name a place on a celestial body in the Solar System, you must first decide on a theme. For example, the theme for places on Venus is the “names of goddesses”. During discussions between the domestic and overseas project members, suggestions such as “names of castles around the world”, “word for ‘dragon’ in different languages” and the “names of deep-sea creatures” were proposed for the place name theme on Ryugu. After an intense debate, the theme was selected to be “names that appear in stories for children” and a theme proposal was put to the IAU WG. The proposal was accepted on September 25, after which the discussion moved to selecting the topographical features to be named and the choice of name.
- Names cannot be attributed to any location. Instead, there are restrictions on the places that can be assigned an official name involving considerations such as scientific importance or size on the celestial body. With this in mind, volunteers from the project members as well as planetary geology experts (hereinafter referred to as the Place Name Core Members) discussed the place selection and completed the application forms for naming based on the exploration data. On October 12, we proposed 13 place names to the IAU WG. After additional discussion with the WG, 9 were accepted as proposed by the team and the remaining 4 names were approved after an amendment suggested by the IAU.
- The surface of celestial bodies has a range of different topologies. We applied to give names to four different topology types on the Ryugu surface. The first type is “dorsum” which originates from the Latin for peak or ridge. The second type is “crater” which are familiar structures on the Moon and asteroids. Then “fossa” meaning grooves or trenches and finally the Latin word “saxum” for the rocks and boulders that are a main characteristic of the Ryugu terrain. Saxum is actually a new classification of terrain type that we applied to introduce due to the nature of Ryugu.
- Numerous boulders are distributed on the surface of Ryugu. Regardless of where you look, there are rocks, rocks and more rocks. This is a major characteristic of Ryugu and continues to make plans for the touchdown operation of the spacecraft difficult. Additionally, spectroscopic observations revealed that the giant boulder (Otohime saxum) at the south pole has not only a substantial size, but also a distinct visible light spectrum that reveals materials and surface conditions that are different from the surrounding areas. Since this boulder is the most important topographical feature for understanding the formation history of Ryugu, the Project strongly hoped to name it. However, there was no precedent for boulder nomenclature and even the name type did not exist (during the exploration of the first Hayabusa mission, naming the huge boulder protruding from asteroid Itokawa was not allowed). We therefore proposed the type name for boulders at the same time as applying for the place names. Since terrain type names are usually Latin, we proposed “saxum” (meaning rocks and stones in Latin) as the type name for boulders. The IAU accepted this nomenclature for boulders with a few conditions (such as the boulder must be 1% or more of the diameter of the celestial body) and the type name that we suggested was adopted (!). This is how the new terrain type “saxum” was born.
- Figure 70 shows a map of Ryugu with the place names labelled. Additionally, Figure71 shows the location of the places on images of Ryugu taken from four different directions. In these figures, the north pole of Ryugu is at the image top. Please keep in mind that the north pole of Ryugu is in the same direction as the south pole on Earth, as Ryugu rotates in the opposite direction. Table 5 shows a list of the place names.
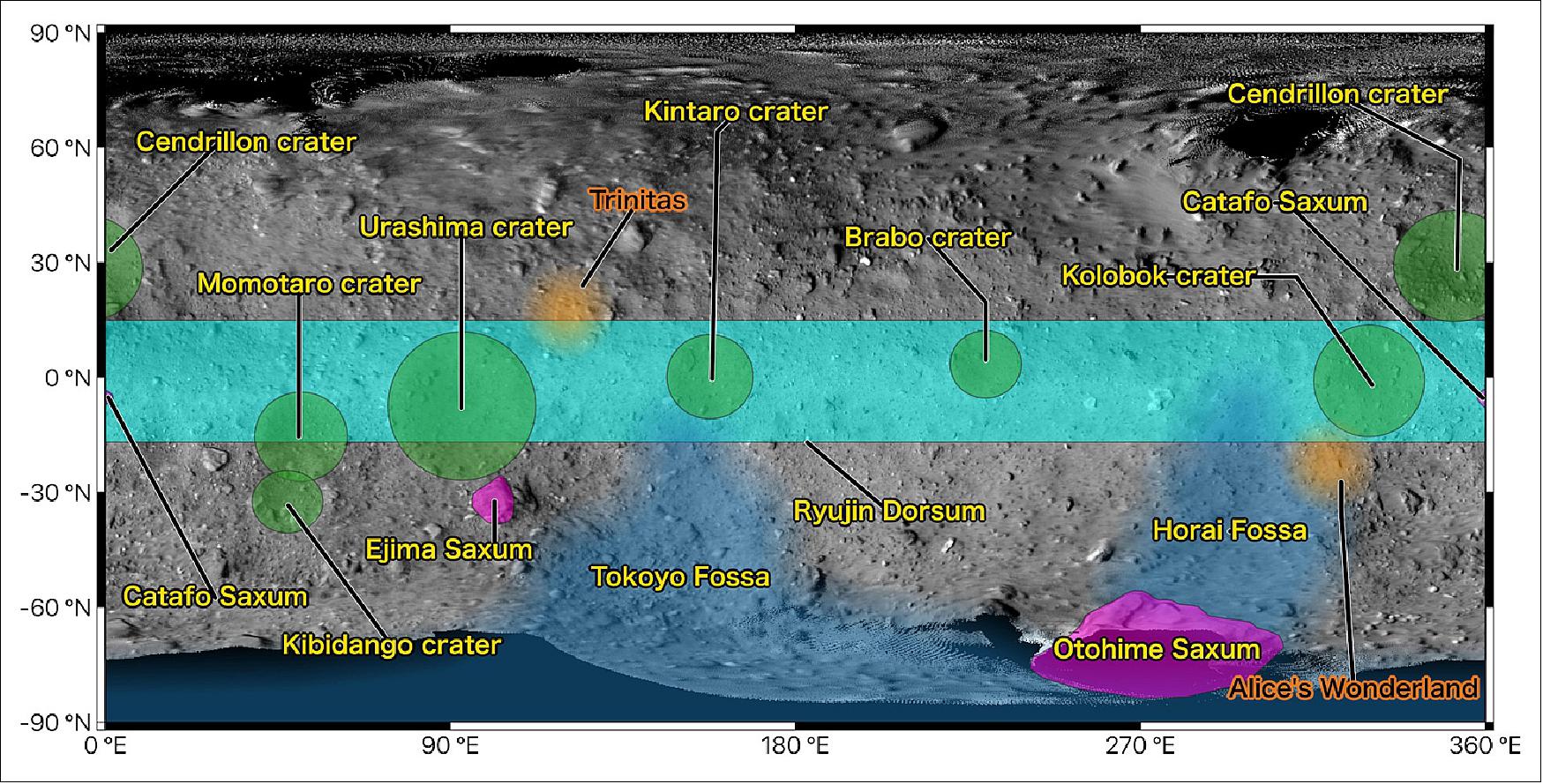
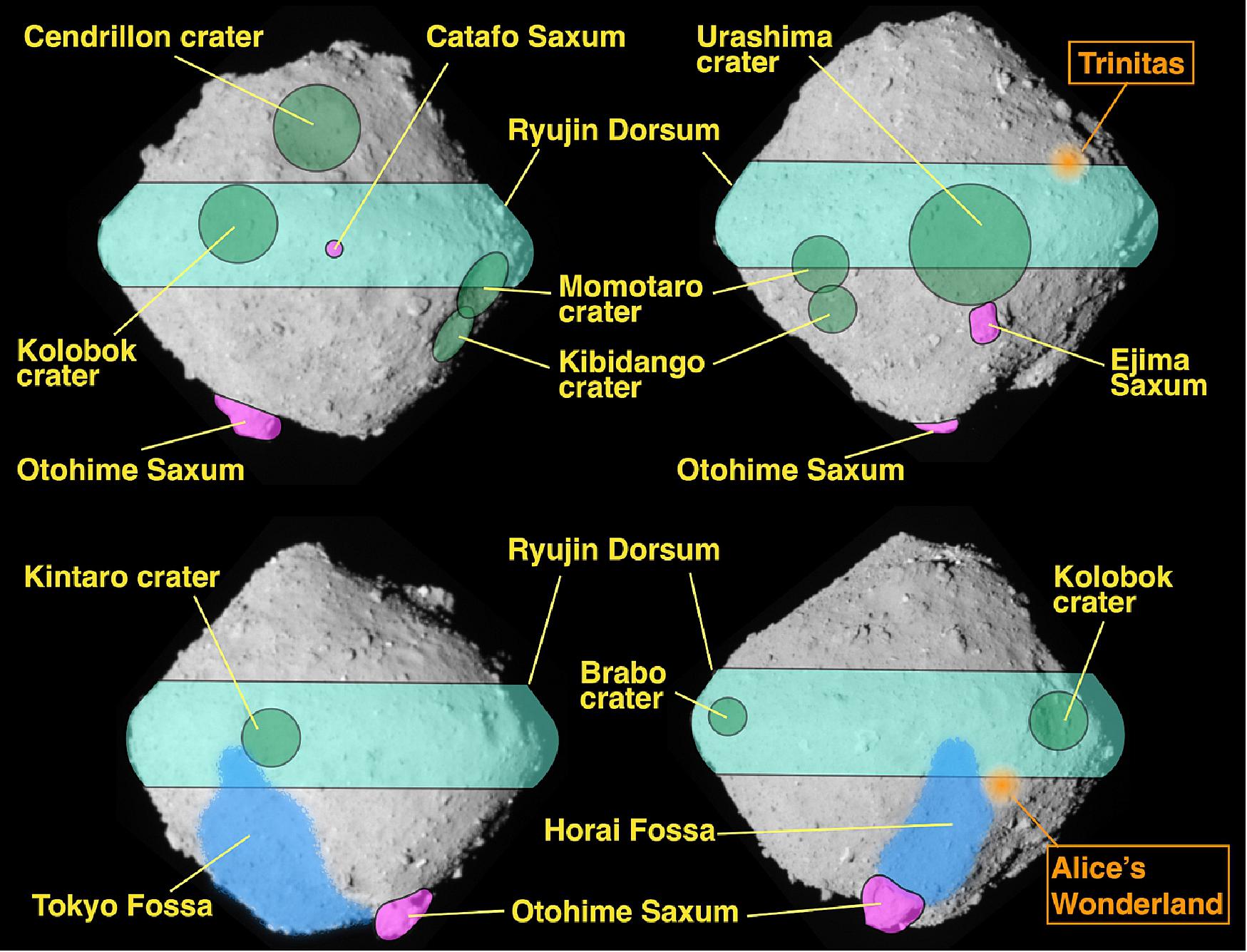
Name | Type | Terrain description | Original story | Country |
Origin of name | ||||
Ryujin | Dorsum | Equatorial ridge | Urashima Taro | Japan |
Dragon god who is Princess Otohime’s father | ||||
Urashima | Crater | Biggest crater on Ryugu | Urashima Taro | Japan |
Fisherman who rescued the turtle | ||||
Cendrillon | Crater | One of the biggest craters outside the equatorial ridge | Cinderella | France |
The French name for Cinderella | ||||
Kolobok | Crater | Typical crater on the equatorial ridge | Kolobok | Russia |
A small round bread that ran away from home | ||||
Brabo | Crater | Typical crater on the equatorial ridge | Brabo and the giant | Netherlands |
The brave young man who defeated a giant | ||||
Kintarou | Crater | 5th largest crater on Ryugu | Kintarou | Japan |
The child with super strength who grew up on Mt Ashigara | ||||
Momotarou | Crater | 4th largest crater on Ryugu | Momotarou | Japan |
The boy born from a peach who fought against an ogre | ||||
Kibidango | Crater | 6th largest crater on Ryugu | Momotarou | Japan |
Food that Momotarou gave his friends | ||||
Tokoyo | Fossa | Ryugu’s largest groove-shaped depression | Urashima Taro | Japan |
Tokoyo, a faraway land across the sea, the land of eternal life | ||||
Horai | Fossa | Ryugu’s 2nd largest groove-shaped depression | Urashima Taro | Japan |
Horai, the utopia in the sea | ||||
Catafo | Saxum | Boulder that denotes the prime meridian on Ryugu | Cajun Folktales | America |
Boy who cleverly marked a route to avoid losing his way | ||||
Otohime | Saxum | Ryugu’s biggest boulder | Urashima Taro | Japan |
The princess who lived in Ryugu castle and entertained Urashima and who gave him the treasure box (tamatebako) | ||||
Ejima | Saxum | One of the boulders that holds the key to Ryugu’s formation history | Urashima Taro | Japan |
Where Urashima rescued the turtle and left for Ryugu Palace | ||||
- As it is difficult to get a feel for how the place names were chosen from just a list, we will introduce the story behind the main choices below.
- The asteroid name “Ryugu” comes from the Japanese fairy tale of Taro Urashima. In the story, Urashima is a fisherman who rescues a sea turtle from the cruelty of a group of children. The turtle takes Urashima to the underwater palace of Ryugo-jo (Dragon Palace), where he meets the princess, Otohime. After 3 years, Urashima wishes to return home and is given a treasure box (tamatebako) by Otohime with instructions never to open it. But when Urashima returns to the surface, he discovers everything he knew has changed as 300 years has actually past. In confusion, Urashima opens the treasure box and is engulfed in white fog. When it clears, he has become an old man, as the box contained his age.
- With the name of the asteroid being Ryugu, there was a strong desire from the Project to use other names that appear in Urashima’s story for major asteroid topography. However, place names cannot be common nouns so words such as “sea bream”, “flounder” and “turtle” do not work and we were limited to names such as Taro Urashima, Otohime etc.
- Therefore, “Urashima” was chosen for the biggest crater on Ryugu and “Otohime” for the largest boulder near the south pole. Both of these are very important features for deciphering the formation history of Ryugu. However, Otohime had already been used! Venus (whose place theme uses the names of goddesses) had already a location named Otohime Tholus. Otohime was therefore initially refused by the IAU when it was proposed. But Otohime is an extremely important person in the story of Taro Urashima and how can we collect the tamatebako if Otohime is not on Ryugu?! (That was a joke, but we did want to use such a relevant name.) Since the name was important to the Project, the place name core members refined the proposal to the IAU, explaining why Otohime should be one of the main topological features on Ryugu and this was accepted.
- A defining feature of Ryugu is that the shape is similar to a spinning top or abacus bead. This shape is the combination of two cones which appear almost circular when seen from the north pole. The ridge where they join was named “Ryujin”, after the ruler of the Dragon Palace who is the father of princess Otohime. This name came from the Place Name Core Members who felt the ridge resembled a dragon coiling around the asteroid or an ouroboros (the image of the serpent or dragon that swallows its own tail).
- On either side of Otohime saxum there are large grooves extending in the equatorial direction. In the story of Taro Urashima, Otohime lives in this mysterious place at the bottom of the ocean which is sometimes depicted as a different world in the various retellings of the tale. This world is often called “Horai”, “Tokoyo” or “Niraikanai”. The grooves adjacent to Otohime saxum were therefore named Horai fossa and Tokoyo fossa.
- There is a reasonably big boulder to the southeast of the Urashima crater. According to one version of the tale, the place where Taro Urashima helped the turtle and left to travel to Ryugu-jo is the place “Ejima”, which gave the boulder its name Ejima saxum.
- There are also large craters on both sides of Urashima crater. In particular, there are two craters stuck together along the north-south direction to the west. This state reminded us of the kibidango (Japanese dumplings) in another Japanese fairy tale called Momotaro. The northern crater of the pair was therefore named “Momotaro crater” and the southern crater became “Kibidango crater”. To the east of the Urashima crater, there is a crater with big black boulder inside. This reminded us of the Japanese tale of Kintaro, a boy with super strength who carried a broad-axe, and so was named “Kintaro crater”.
- Ryugu also has topological names derived from children’s stories from outside Japan. For example, while you might not immediately recognize the name of the Cendrillion crater, the name is from the original French name for the familiar fairy tale, “Cinderella”. The name of the Brabo crater is derived from the name of the hero of a Netherlands tale, which was proposed by the overseas project members. The Kolobok crater and Catafo saxum were both names proposed by the IAU WG. They are taken from Russian and Cajun (famous for Cajun cuisine in the USA) folktales.
- These are the place names formally recognized by the IAU WG. In addition, there are two nicknames shown in Figures 70 and 71; Trinitas (the MINERVA-II1 landing site and named for the goddess Minerva’s birth place) and Alice’s Wonderland (the MASCOT landing site). These were places named by the project to identify the points where MINERVA-II1 and MASCOT landed, but are not official names recognized by the IAU.
• December 28, 2018: This week is the second half of the solar conjunction operation. Signals from the beacon operation are becoming cleaner every day and it is possible to differentiate between “0” and “1” without overlapping the signal multiple times. Telemetry can now also be clearly received, transmitting a detailed account about the state of the spacecraft. Data collected while communication with Hayabusa-2 was not possible, was saved to onboard memory. This week, we accessed the recorded data for the first time in a long while and we are relieved to confirm that Hayabusa-2 has been functioning normally during the period when telemetry could not be received. Although the communication environment is returning to normal operation, the return to the home position (at 20 km from the asteroid) is still a little way away. 58)
• December 25, 2018: From late November 2018 until the end of December, the solar conjunction operation is underway for Hayabusa-2. Solar conjunction refers to the situation where the direction to the spacecraft almost overlaps with that to the Sun when viewed from the Earth. This is the same “conjunction” as in astronomy, whereby planets and stars appear to line up on the sky. During this time, communication with Hayabusa-2 is disrupted due to radio waves emitted from the Sun and from its surrounding plasma. We therefore do not perform operations such as descending towards Ryugu during this period. 59)
- In order not to risk a collision with Ryugu while communication is disrupted, we place the spacecraft slightly further away from the asteroid in a “conjunction transition orbit”. Figure 72 shows an animation of the trajectory of the spacecraft in the Hill coordinate system. In this coordinate system, the Sun is always to the left and outside the figure. The black dot on the right is Ryugu. From late November to the end of December, the spacecraft will travel along the blue line. The red dots are points where a trajectory control maneuver will be performed.
• December 21, 2018: Until now, “astrodynamics” has been one of the less frequently reported operations for Hayabusa2. In space engineering, the movement, attitude, trajectory and overall handling of the flight mechanics of the spacecraft is referred to as “astrodynamics”. For example, astrodynamics played an active role in the gravity measurement descent operation in August 2018. While this was a short time ago, let’s look at a few of the details. 60)
- From August 6 - 7, 2018, the “Gravity Measurement Descent Operation” was performed to estimate the strength of asteroid Ryugu’s gravity. Hayabusa-2 initially descended from the home position at an altitude of 20 km to an altitude of 6100 m. Orbital control was then temporarily stopped to allow the spacecraft to “free-fall” towards Ryugu, moving due to the gravitational pull of the asteroid alone. When the altitude decreased to about 850 m, the thrusters were instantaneously fired to give the spacecraft an upward velocity, whereupon Hayabusa-2 performed a “free-rise” to an altitude of about 6100 m (the spacecraft’s movement here is similar to throwing a ball vertically upwards).
- From the spacecraft’s motion during the free-fall and free-rise, the strength of Ryugu’s gravity could be measured and the mass of the asteroid obtained. As a result of this measurement, the mass of Ryugu was calculated to be about 450 million tons.
- The shape and volume of Ryugu are known thanks to the construction of the three-dimensional shape model (article on July 11). Using this volume and the measured mass of Ryugu from the gravity measurement descent operation, the average density of the asteroid can be calculated. The average density and shape of Ryugu could then be used to find the gravitational strength (gravitational acceleration) on the surface of Ryugu, which was found to have the following distribution:
- The gravitational acceleration on the surface of Ryugu is approximately 0.11~0.15 mm/s2, which is about eighty thousandths (~ 1/80000th) the strength of the Earth’s gravity and a few times stronger than that of Itokawa. We can additionally see that the gravity near the poles of Ryugu is stronger than near the asteroid’s equator. This is due to the equatorial ridge protruding from the surface.
- The information on the asteroid’s gravitational acceleration obtained through this method has been used for operations that approach close to the surface of Ryugu. Of course, it will also be used during touchdown. The gravity measurement descent operation described here is one application of astrodynamics. The astrodynamics team for Hayabusa-2 uses a variety of similar methods to estimate the trajectory of the spacecraft and Ryugu, and to evaluate the dynamic environment for operating around Ryugu.
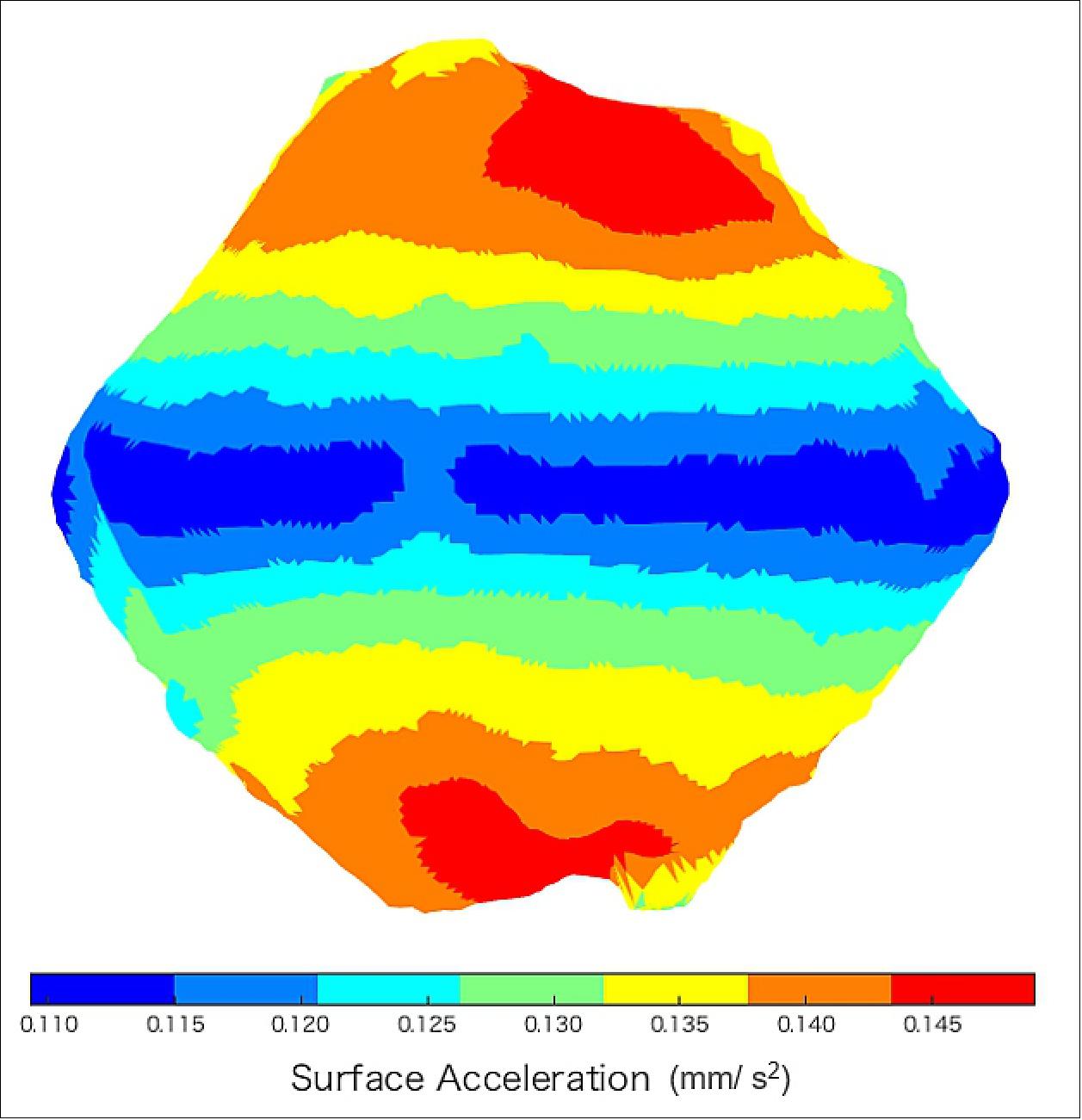
• October 26, 2018: The second touchdown rehearsal (TD1-R1-A) was performed from October 14 to 16. On October 15, just before 22:44 JST when the spacecraft reached a new low altitude of 22.3m, we successfully photographed the surface of Ryugu using the Optical Navigation Camera – Telescopic (ONC-T). This is the highest resolution image to date (Figure 74). 61)
- The image resolution is about 4.6 mm/pixel. This is the highest resolution image that Hayabusa-2 has taken so far and even small rocks with a diameter of 2 – 3 cm are clearly visible. The maximum resolution of AMICA –the camera at the time of the first Hayabusa mission— was 6 mm/pixel, so even its resolution has now been exceeded. As the image captured of the asteroid surface from the spacecraft, it will be one of the highest resolution to be taken of Ryugu (MINERVA-II1 and MASCOT which landed on the surface, have captured even higher resolution images).
- A feature from the image is the lack of regolith (sandy substance). This was suspected to be true from the images obtained so far, but it is more clearly seen in this high resolution photograph. There is also a collection of pebbles with different colors, which may be evidence that the surface material of Ryugu is mixed.
- It is a landmark for the mission that such high resolution images were captured by the spacecraft before landing. Such a detailed image that can be used to visually recognize anything above about 1cm in size is extremely useful in analyzing the surface photographs returned from the MINERVA-II1 rovers and MASCOT lander and also for understanding the microanalysis from the sample once it is returned to Earth.
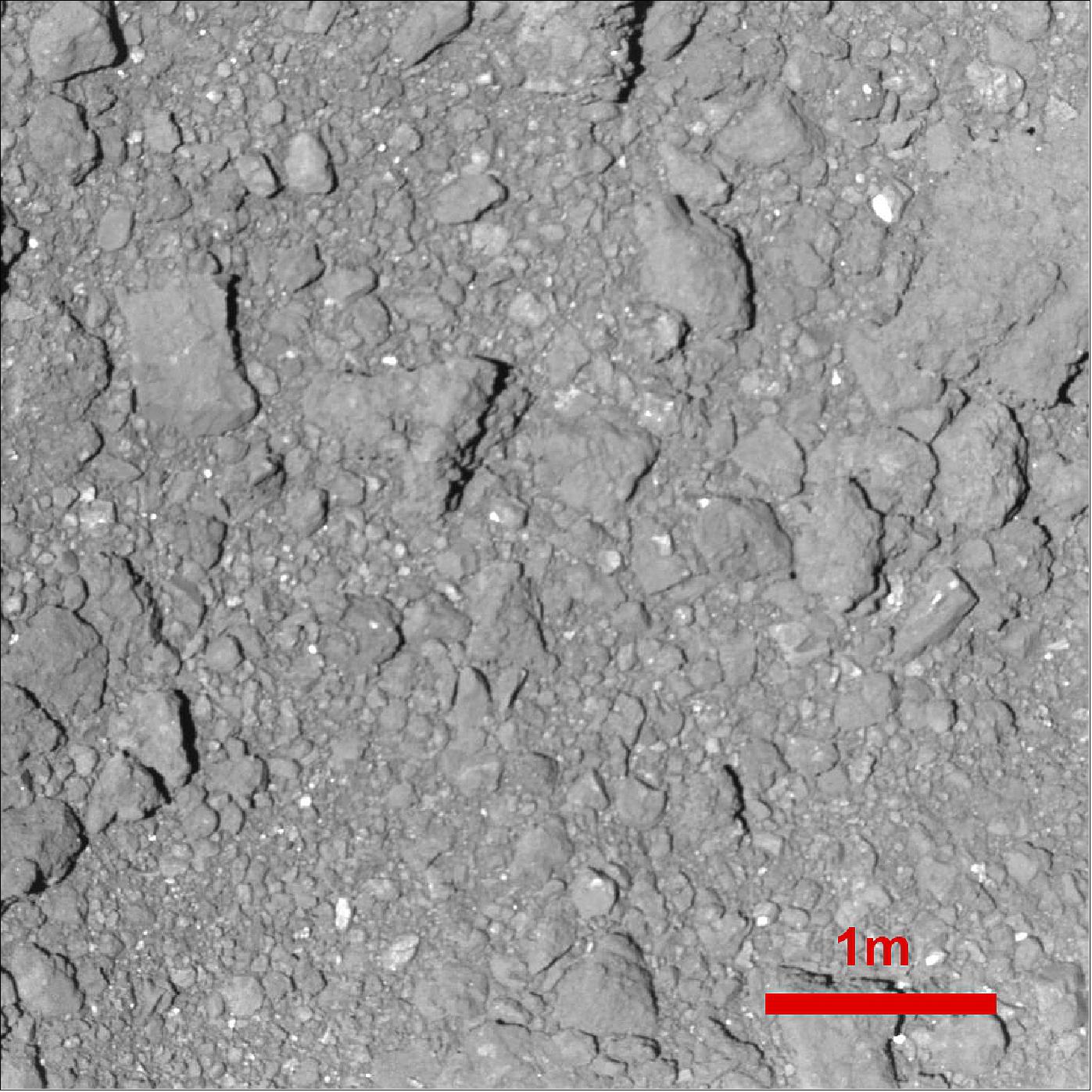
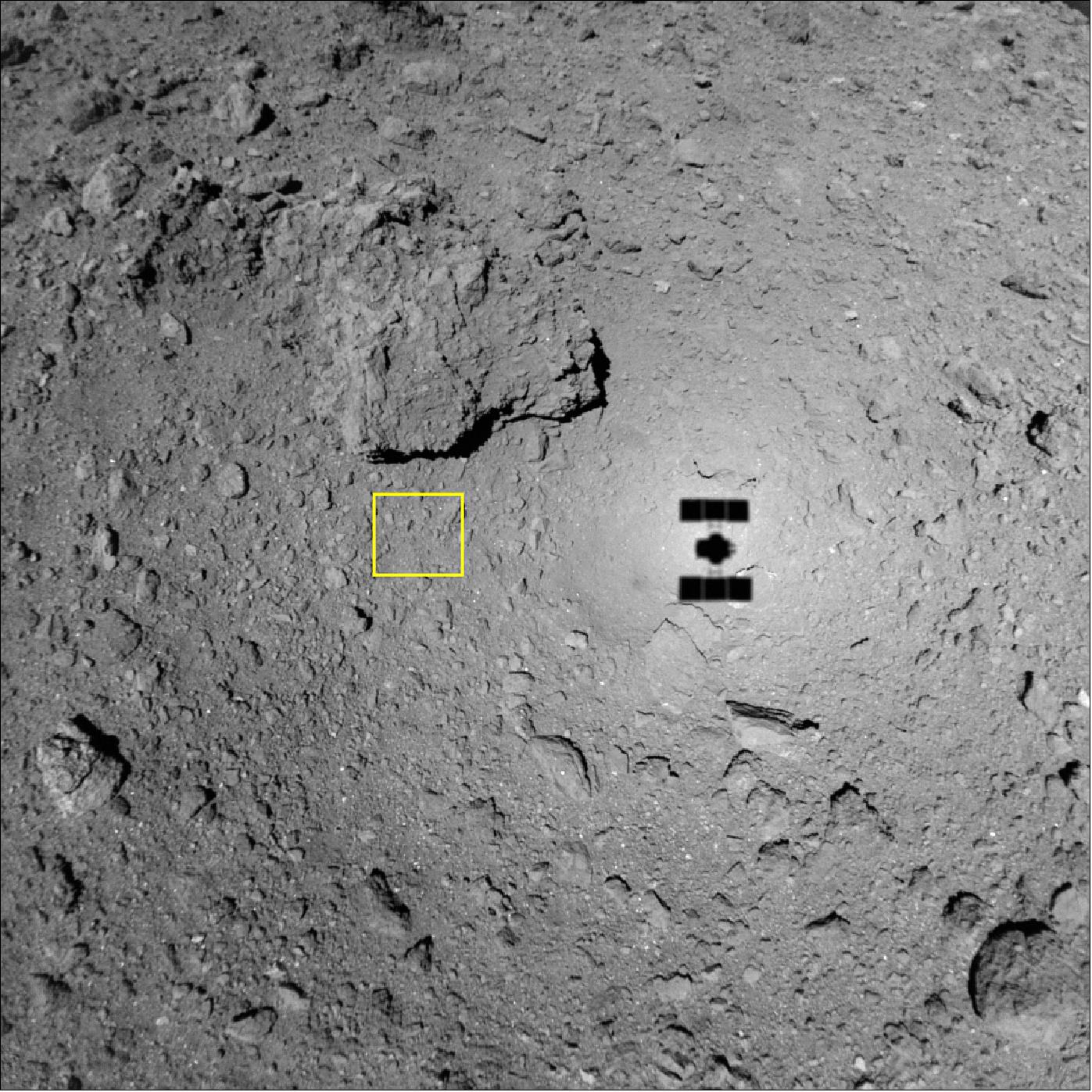
• October 26, 2018: Onboard Hayabusa-2 is a Small Monitor Camera (CAM-H, also called the Small Monitor Camera Head), which was funded by contributions from the public (Figure 1). 62)
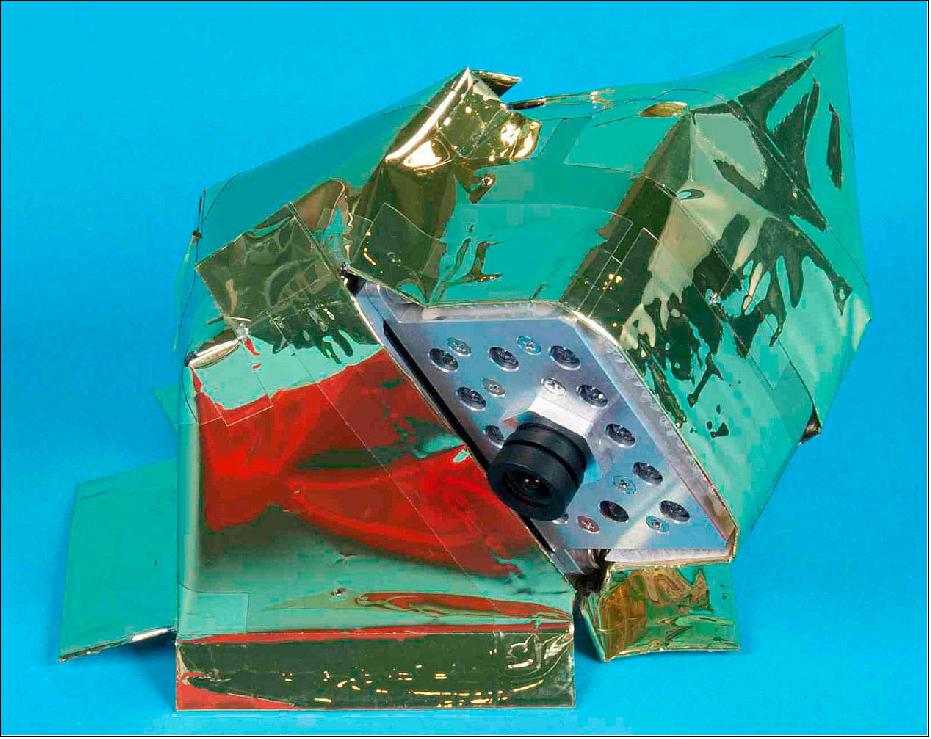
- The Hayabusa-2 project used this camera to capture a picture of the sampler horn on 14 August. This is shown in Figure 77. From this photograph, we can perform a visual inspection of the sampler horn and confirm it is sound after Hayabusa-2 has arrived at Ryugu.
- In connection with the sampler horn, the project also tested a laser device called the LRF-S2 in April this year. LRF-S2 is designed to measure the distance to the tip of the sampler horn. During touchdown, the sampler horn will compress as it touches the surface of Ryugu. When the distance measurement from LRF-S2 changes or the laser from LRF-S2 deviates from its target at the base of the sampler horn, bullets will be fired to stir up the surface material for collection. This makes the LRF-S2 an important device for successful sample collection. The photograph captured during this test is shown in Figure 78.
• October 26, 2018: Approximately one month has passed since the laser altimeter (LIDAR) onboard Hayabusa-2 measured the distance to asteroid Ryugu for the first time. Figure 79 shows the analysis of the data acquired during this period, with each point showing where the laser reflected from the surface of Ryugu. Normally, the attitude of the spacecraft is controlled so that that the laser altimeter faces the equator. But during this operation, the attitude was changed to move along the asteroid’s axis of rotation; this is an “attitude scan” that has been performed twice so far. In the vicinity of the poles, there are currently fewer data points, but you can see the global shape of Ryugu. 63)
- In order to construct this shape, the orbit of the spacecraft must be accurately predicted. The accuracy is currently (in early August) several hundred meters. That the position of a spacecraft 300 million km away from Earth can be determined to within hundreds of meters is impressive, but this error is still too big to describe the shape of the 900 m diameter Ryugu. The project is therefore improving the trajectory of the spacecraft using the distance measurement data from the laser altimeter. The improved orbital data of the spacecraft also aids the other equipment teams on Hayabusa-2 and is being used to select the best landing site.
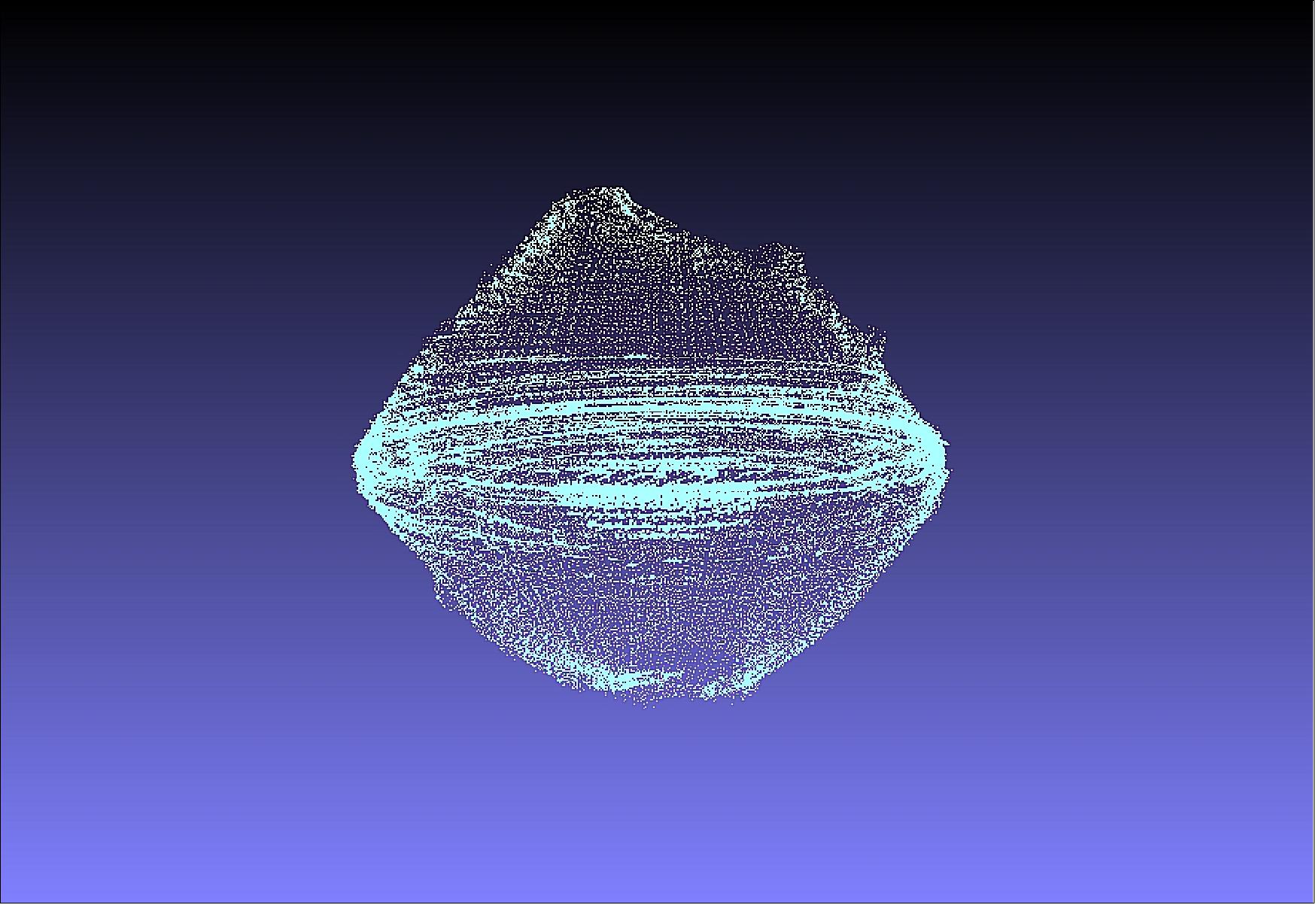
• October 25, 2018: DPS is the Division for Planetary Sciences of the American Astronomical Society and is one of the largest academic societies for the planetary field in the world. This year will be the 50th meeting for the DPS ( https://aas.org/meetings/dps50 ), held in Knoxville, Tennessee in the USA from October 21 to 26. A special session dedicated to Hayabusa-2 will be held during this meeting, where one session in the conference will be devoted to announcements only from this mission. This is a first for Hayabusa2. Hayabusa2 will also be the subject of a press briefing held during the conference. 64)
- The Hayabusa-2 special session involves thirteen studies presented in the poster session on October 25 and nine oral presentations held on October 26. In addition to these special sessions, there is one additional presentation related to Hayabusa2 in session 309. This brings the total number of Hayabusa2 presentations up to 23.
- There will also be a press conference held on October 25 at 12:00 (October 26, 01:00 JST) with the title “Hayabusa-2 Explores Asteroid Ryugu”.
• October 14, 2018: The second touchdown rehearsal of Hayabusa-2 will be performed from October 14 – 16. The purpose of this rehearsal is to confirm the operation characteristics of the LRF (Laser Range Finder) which performs the altitude measurement at short distances. To test this, the spacecraft will descend to an altitude of about 25 m. This will be the lowest altitude reached to date. 65)
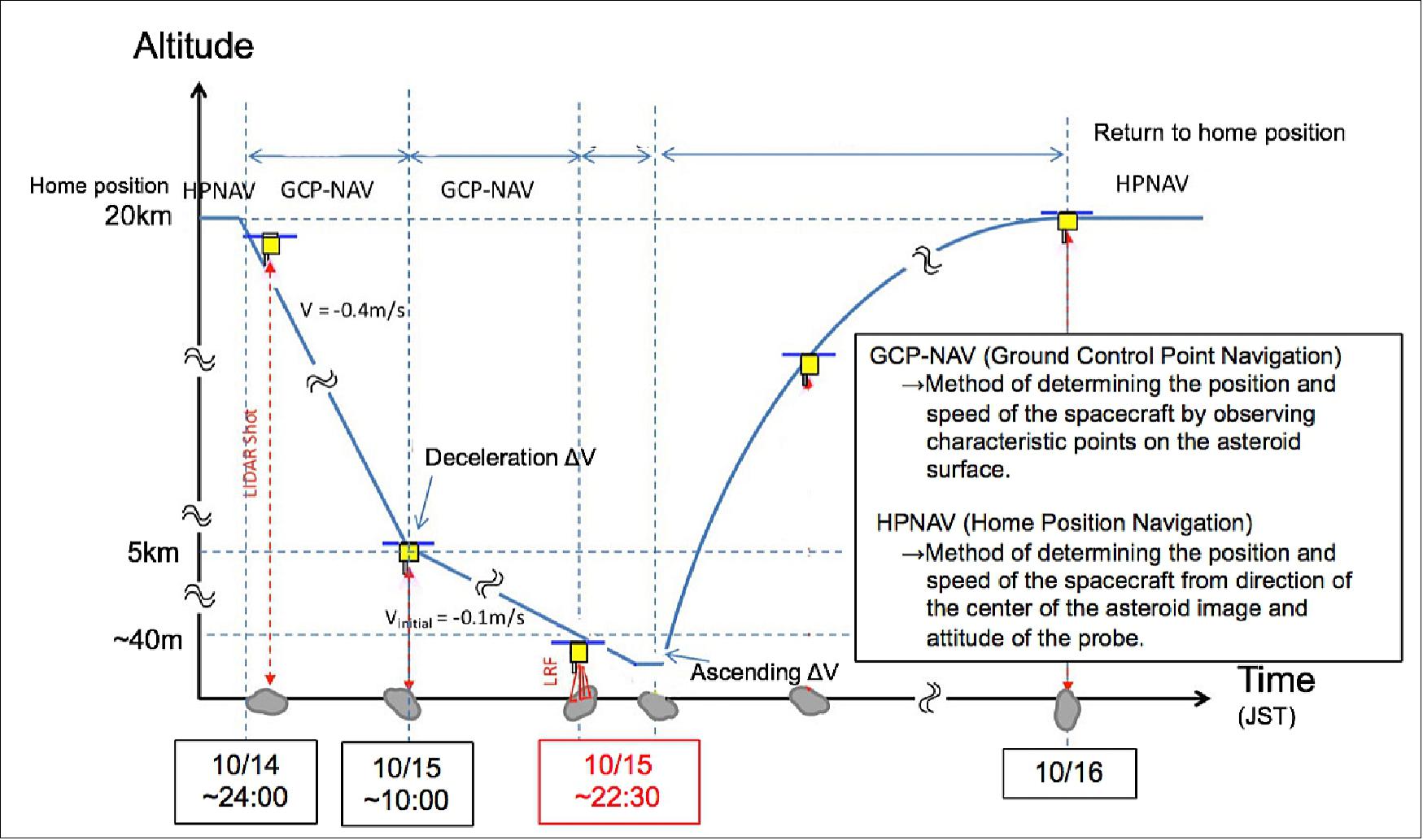
- The first touchdown rehearsal (TD1-R1) was conducted between September 10 – 12. During this operation, problems occurred with the distance measurement taken with the LIDAR (laser altimeter) once the spacecraft had descended to about 600 m. This caused the spacecraft to rise autonomously. The issue was addressed by adjusting the settings on the laser altimeter and it was confirmed that there were no further issues during the subsequent separation operations of MINERVA-II1 and MASCOT. As the spacecraft was only able to descend to an altitude of 600 m during TD-R1, the LRF characteristics could not be verified. Therefore, we are performing this check with this rehearsal.
- Although this is the second time a rehearsal operation has been performed, the name is TD1-R1-A as it is re-starting the challenge of TD1-R1.
• October 12, 2018: Six minutes of free fall, a gentle impact on the asteroid and then 11 minutes of rebounding until coming to rest. That is how, in the early hours of 3 October 2018, the journey of the MASCOT asteroid lander began on Asteroid Ryugu – a land full of wonder, mystery and challenges. Some 17 hours of scientific exploration followed this first 'stroll' on the almost 900 m diameter asteroid. The lander was commanded and controlled from the MASCOT Control Center e at the DLR (German Aerospace Center) site in Cologne in the presence of scientific teams from Germany, France and Japan. MASCOT surpassed all expectations and performed its four experiments at several locations on the asteroid. Never before in the history of spaceflight has a Solar System body been explored in this way. It has now been possible to precisely trace MASCOT’s path on Ryugu’s surface on the basis of image data from the Japanese Hayabusa-2 space probe and the lander’s images and data. 66)
- "This success was possible thanks to state-of-the-art robotic technology, long-term planning and intensive international cooperation between the scientists and engineers of the three space nations Japan, France and Germany," says Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology about this milestone in Solar System exploration. "We are proud of how MASCOT was able to master its way across the asteroid Ryugu over boulders and rocks and send so much data about its composition back to Earth," says DLR Chair Pascale Ehrenfreund.
- MASCOT had no propulsion system and landed in free fall. Six minutes after separating from Hayabusa-2, and following the end of a ballistic trajectory, the landing module made its first contact with asteroid Ryugu. On the surface, MASCOT moved through the activation of a tungsten swing arm accelerated and decelerated by a motor. This made it possible for MASCOT to be repositioned to the 'correct' side or even perform hops across the asteroid's surface. The gravitational attraction on Ryugu is just one 66,500th of the Earth's, so the little momentum provided was enough: a technological innovation for an unusual form of mobility on an asteroid surface used for the first time in the history of space travel as part of the Hayabusa-2 mission.
Through a Rock Garden Full of Boulders
- To reconstruct MASCOT's path across the surface of Ryugu, the cameras aboard the Hayabusa-2 mother probe were aimed at the asteroid. The Optical Navigation Cameras (ONC) captured the lander's free fall in several images, detected its shadow on the ground during the flight phase, and finally identified MASCOT directly on the surface in several images. The pattern of the countless boulders distributed on the surface could also be seen in the direction of the respective horizon in oblique photographs of the lander's DLR MASCAM camera. The combination of this information unlocked the unique path traced by the lander.
- After the first impact, MASCOT smoothly bounced off a large block, touched the ground about eight times, and then found itself in a resting position unfavorable for the measurements. After commanding and executing a specially prepared correction maneuver, MASCOT came to a second halt. The exact location of this second position is still being determined. There, the lander completed detailed measurements during one asteroid day and night. This was followed by a small ‘mini-move’ to provide the MicrOmega spectrometer with even better conditions for measuring the composition of the asteroid material.
- Finally, MASCOT was set in motion one last time for a bigger jump. At the last location it carried out some more measurements before the third night on the asteroid began, and contact with Hayabusa-2 was lost as the spaceship had moved out of line of sight. The last signal from MASCOT reached the mother probe at 21:04 CEST. The mission was over. "We were expecting less than 16 hours of battery life because of the cold night, says MASCOT project manager Tra-Mi Ho from the DLR Institute of Space Systems. "After all, we were able to operate MASCOT for more than one extra hour, even until the radio shadow began, which was a great success." During the mission, the team named MASCOT's landing site (MA-9) 'Alice's Wonderland', after the eponymous book by Lewis Carroll (1832-1898).
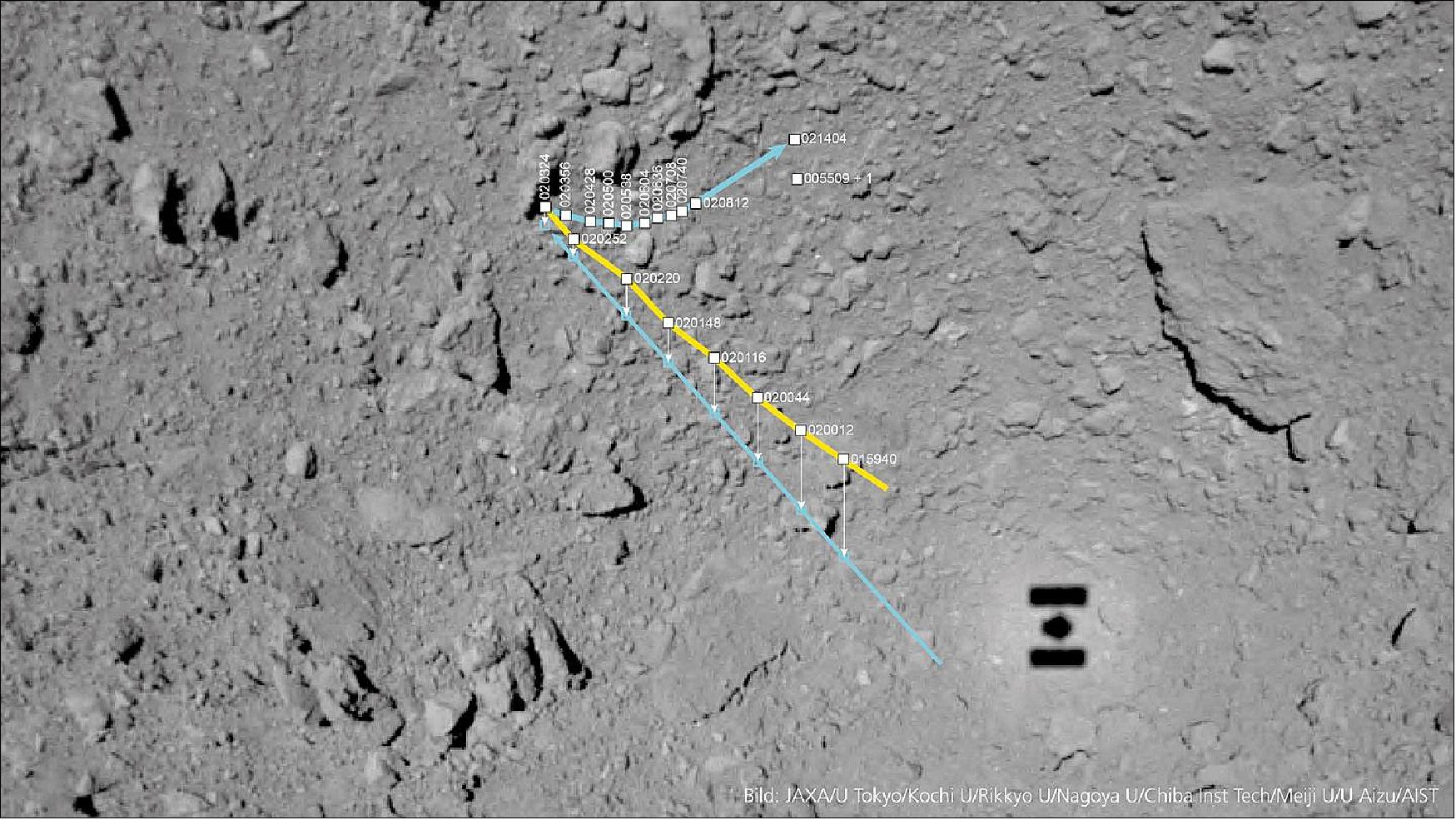
A True Wonderland
- Having reconstructed the events that took place on asteroid Ryugu, the scientists are now busy analyzing the first results from the acquired data and images. "What we saw from a distance already gave us an idea of what it might look like on the surface," reports Ralf Jaumann from the DLR Institute of Planetary Research and scientific director of the MASCOT mission. "In fact, it is even crazier on the surface than expected. Everything is covered in rough blocks and strewn with boulders. How compact these blocks are and what they are composed of, we still do not know. But what was most surprising was that large accumulations of fine material are nowhere to be found – and we did not expect that. We have to investigate this in the next few weeks, because the cosmic weathering would actually have had to produce fine material," continues Jaumann.
- "MASCOT has delivered exactly what we expected: an 'extension' of the space probe on the surface of Ryugu and direct measurements on site," says Tra-Mi Ho. Now there are measurements across the entire spectrum, from telescope light curves from Earth to remote sensing with Hayabusa2 through to the microscopic findings of MASCOT. "This will be of enormous importance for the characterization of this class of asteroids," emphasizes Jaumann.
- Ryugu is a C-type asteroid – a carbon-rich representative of the oldest bodies of the four-and-a-half-billion year-old Solar System. It is a 'primordial' building block of planet formation, and one of 17,000 known Near-Earth asteroids.
- On Earth, there are meteorites with a composition that could be similar to Ryugu's, which are found in the Murchison Range, Australia. However, Matthias Grott from the DLR Institute of Planetary Research and responsible for the radiometer experiment MARA is skeptical as to whether these meteorites are actually representative of Ryugu in terms of their physical properties: "Meteorites such as those found in Murchison are rather massive. However, our MARA data suggests the material on Ryugu is slightly more porous. The investigations are just beginning, but it is plausible to assume that small fragments of Ryugu would not survive the entry into the Earth's atmosphere intact."
Time (CEST) | Event |
03:57:21 | At an altitude of 51 m above asteroid Ryugu, MASCOT is pushed out of the Hayabusa2 supporting frame by means of a spring |
04:03 | Approximately six minutes later, MASCOT touches down on Ryugu, making contact with a block of rocks about three to four meters |
Around 04:34 | After another approximately 31 minutes and several contacts with the surface, MASCOT reaches its first resting position. It is |
Around 06:30 | At the DLR Control Center in Cologne it is recognized that MASCOT is lying on an unfavorable side and thus cannot carry out |
Around 09:20 | An unscheduled command from the Earth is sent to Hayabusa-2 and from there to MASCOT to activate the swing arm to turn |
Around 09:52 | MASCOT has completed its first day-and-night cycle. The second day on Ryugu begins. |
Around. 10:30 | The maneuver has brought the desired result. MASCOT is in the right position, is now operational and automatically starts |
Around 12:51 | The second daylight phase on Ryugu is slowly coming to an end, and MASCOT turns with Ryugu into its second asteroid night. |
Around 17:28 | MASCOT’s third day on Ryugu begins. |
Around 18:29 | MASCOT successfully executes a mini-move. This maneuver was commanded by the operations team in Cologne to optimize |
Around 20:04 | The last jump is commanded to MASCOT and the lander goes into the End of Life phase. Further scientific investigations |
21:04 | It is the end of the third day for MASCOT on Ryugu. In the meantime, more than 16 hours have passed – the lander’s expected |
• October 11, 2018: JAXA told reporters the Hayabusa-2 probe is now expected to touch down on the Ryugu asteroid in "late January" at the earliest, rather than at the end of this month as initially expected. JAXA project manager Yuichi Tsuda said they needed more time to prepare the landing as the latest data showed the asteroid surface was more rugged than expected. 67)
- "The mission... is to land without hitting rocks," Tsuda said, adding this was a "most difficult" operation. "We had expected the surface would be smooth... but it seems there's no flat area."
- Scientists are already receiving data from other subsatellites deployed on the surface of the asteroid. Last week, JAXA successfully landed a new 10 kg observation robot known as MASCOT (Mobile Asteroid Surface Scout). Ten days earlier, a pair of MINERVA-II micro-rovers were dropped onto the asteroid - marking the first time that moving, robotic observation devices have been successfully deployed.
- These rovers are taking advantage of Ryugu's low gravity to jump around on the surface - travelling as far as 15 m and staying above the surface for as long as 15 minutes - to survey the asteroid's physical features with cameras and sensors.
• October 05,2018: It was a day full of exciting moments and a happy team of scientists and engineers: late in the afternoon of 3 October 2018, the German-French lander MASCOT completed its historic exploration of the surface of the asteroid Ryugu at 21:04 CEST, as its battery ran out. On-asteroid operations were originally scheduled to last 16 hours after separation from the Japanese mother craft Hayabusa-2. But in the end, the battery lasted more than 17 hours. Upon landing in the early morning and subsequently relocating using the built-in swing arm, all instruments collected detailed data on the composition and nature of the asteroid. The on-board camera provided pictures of the landing, hopping maneuvers and various locations on the surface. 68) 69)
a) As planned, MASCOT was able to acquire data about the composition and texture of the asteroid at several locations.
b) Before the battery depleted, the lander sent all scientific data to the Hayabusa-2 mothercraft.
c) New images from MASCOT's landing on asteroid Ryugu were presented by DLR, JAXA and CNES today at the International Astronautical Congress (IAC).
e) Focus: Space, exploration.
- For MASCOT, the Sun set three times on Ryugu. The lander was commanded and controlled from the MASCOT Control Center at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) in Cologne, in the presence of teams of scientists from Japan, France and Germany. All scientific data was transferred to the mother probe according to plan.
- "With MASCOT, it has been possible to, for the first time, explore the surface of an asteroid directly on site so extensively," says Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology. "A mission like this can only be done working in close cooperation with international partners – bringing together all their expertise and commitment." With MASCOT, DLR has been working closely with the Japanese space agency JAXA and the French space agency CNES.

- Jumps and a mini-move: MASCOT landed safely on Ryugu in the early morning of 3 October 2018. "After a first automated reorientation hop, it ended up in an unfavorable position. With another manually commanded hopping maneuver, we were able to place MASCOT in another favorable position thanks to the very precisely controlled swing arm," says MASCOT operations manager Christian Krause from DLR. From that position, MASCOT completed a complete measurement sequence with all instruments over one asteroid day and an asteroid night. "Later, we were able to continue the activities on Ryugu with a special maneuver," adds Ralf Jaumann, DLR planetary scientist and scientific director of MASCOT. "With a 'mini-move' we recorded image sequences that will be used to generate stereo images of the surface once they have been analyzed."
- During the first maneuvers, MASCOT moved several meters to the next measuring point. Finally, and seeing that the lander still had battery power left, the researchers dared to make a bigger jump. All in all, MASCOT explored Ryugu for three asteroid days and two asteroid nights. A day-night cycle on Ryugu lasts about 7 hours and 36 minutes. At 21:04 CEST, communications with Hayabusa-2 were interrupted, because of the radio shadow entering with each asteroid rotation. Hayabusa-2 is now returning to its home position, at an altitude of 20 km above the asteroid’s surface.
- In addition to the images acquired by the DLR camera MASCAM, a DLR radiometer, a magnetometer from TU Braunschweig and a spectrometer from the Institut d'Astrophysique Spatiale provided a variety of measurements on the temperature, magnetic properties and the composition of the near-Earth asteroid Ryugu.
- Waiting for the scientific data: MASCOT is now a silent inhabitant of Ryugu. "The evaluation of the valuable data has just begun," says MASCOT project manager Tra-Mi Ho from the DLR Institute of Space Systems. "We will learn a lot about the past of the Solar System and the importance of near-Earth asteroids like Ryugu. Today, I look forward to the scientific publications that will result from MASCOT and the remarkable Hayabusa-2 mission of our Japanese partners. "Hayabusa-2 played a crucial role in the success of MASCOT. The Japanese probe brought the lander to the asteroid. Thanks to precise planning and control, the communication links to the lander could be optimally used for data transmission, so that the first pictures were received on the very day of landing. The remaining scientific data, which was transmitted to Hayabusa-2, will be sent to Earth in the coming days.
• October 03, 2018: The near-Earth asteroid Ryugu, located approximately 300 million km from Earth, has a new inhabitant: On 3 October 2018, the Mobile Asteroid Surface Scout (MASCOT) landed on the asteroid and began to work. The lander successfully separated from the Japanese Hayabusa-2 space probe at 03:58 CEST (Central European Summer Time, corresponding to 01:58 UTC). The 16 hours in which the lander will conduct measurements on the asteroid’s surface have begun for the international team of engineers and scientists. The day before, JAXA's Hayabusa-2 began its descent towards Ryugu. MASCOT was ejected at an altitude of 51 meters and descended in free fall – slower than an earthly pedestrian – to its destination, the asteroid. The relief about the successful separation and subsequent confirmation of the landing was clearly noticeable in the MASCOT Control Center at DLR in Cologne as well as in the adjoining room: "It could not have gone better," explained MASCOT project manager Tra-Mi Ho from the DLR Institute of Space Systems. "From the lander's telemetry, we were able to see that it separated from the mothercraft, and made contact with the asteroid surface approximately 20 minutes later." The team is now in contact with the lander. 70) 71)
- The moment of separation was one of the risks of the mission: If MASCOT had not successfully separated from Hayabusa-2 as planned and often tested, the lander’s team would hardly have had the opportunity to solve this problem. But everything went smoothly: Already during the descent on the asteroid, MasCam (MASCOT Camera) took 20 pictures, which are now stored on board the Japanese space probe. "The camera worked perfectly," says Ralf Jaumann, DLR planetary scientist and scientific director of the camera instrument. "The team's first images of the camera are therefore safe." The magnetometer team was also able to recognize in the data sent by MASCOT that the MASMAG instrument had switched on and performed measurements prior to the separation. "The measurements show the relatively weak field of the solar wind and the very strong magnetic disturbances caused by the spacecraft," explains Karl-Heinz Glaßmeier from the Technical University of Braunschweig. "At the moment of the separation, we expected a clear decrease of the interference field – and we were able to recognize this clearly."
- MASCOT came to rest on the surface approximately 20 minutes after the separation. Now, the team is analyzing the data that MASCOT is sending to Earth to understand the events occurring on the asteroid Ryugu. The lander should now be on the asteroid’s surface, in the correct position thanks to its swing arm, and have started to conduct measurements independently. There are four instruments on board: a DLR camera and radiometer, an infrared spectrometer from IAS ( Institut d'Astrophysique Spatiale, Orsay, France) and a magnetometer from the TU Braunschweig. Once MASCOT has performed all planned measurements, it is expected to hop to another measuring location. This is the first time that scientists will receive data from different locations on an asteroid. "With MASCOT, we have the unique opportunity to study the Solar System’s most primordial material directly on an asteroid," emphasizes DLR planetary researcher Ralf Jaumann. With the data acquired by MASCOT and the samples that Hayabusa2 brings to Earth from Ryugu in 2020, scientists will not only learn more about asteroids, but more about the formation of the Solar System. "Asteroids are very primordial celestial bodies."

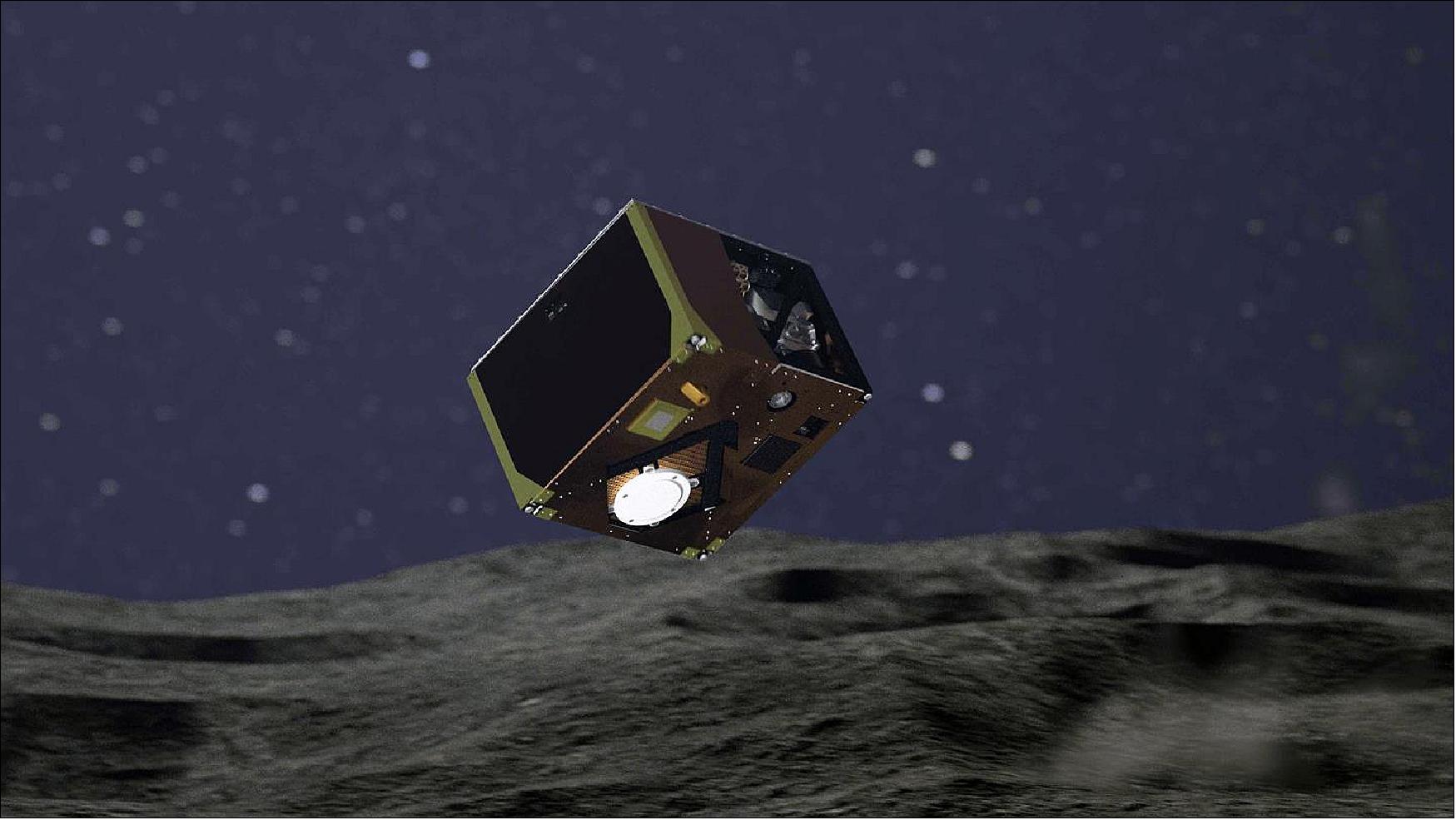
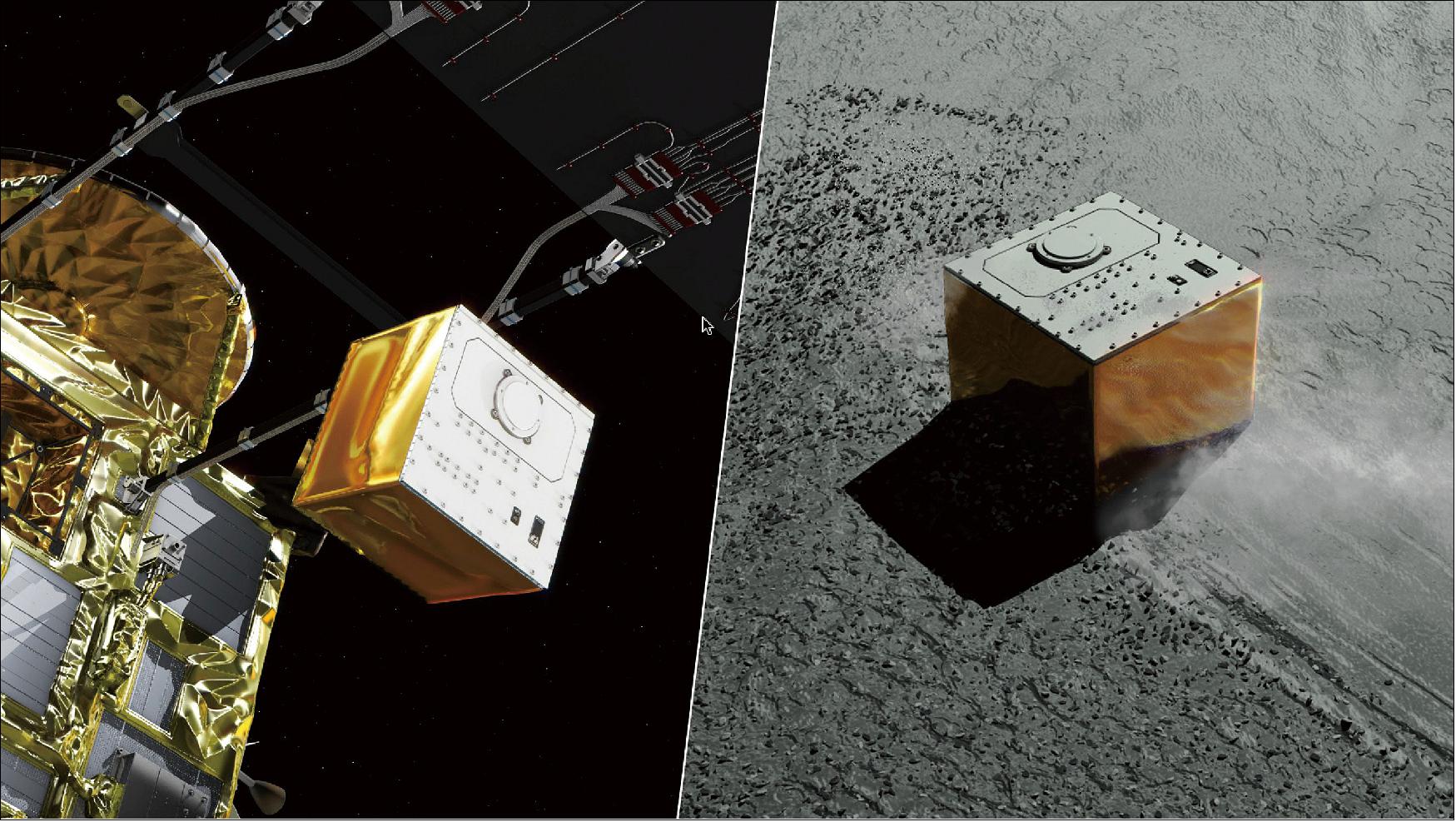
- For the landing site for MASCOT, a region in the southern hemisphere of Ryugu was selected (Figure 86). This location was selected based on criteria that ensured no overlap between the landing sites for the touchdown of Hayabusa-2, MINERVA-II1 and MASCOT, the time to be able to communicate with Hayabusa-2, the duration of sunlight exposure and expectation of scientifically meaningful exploration.
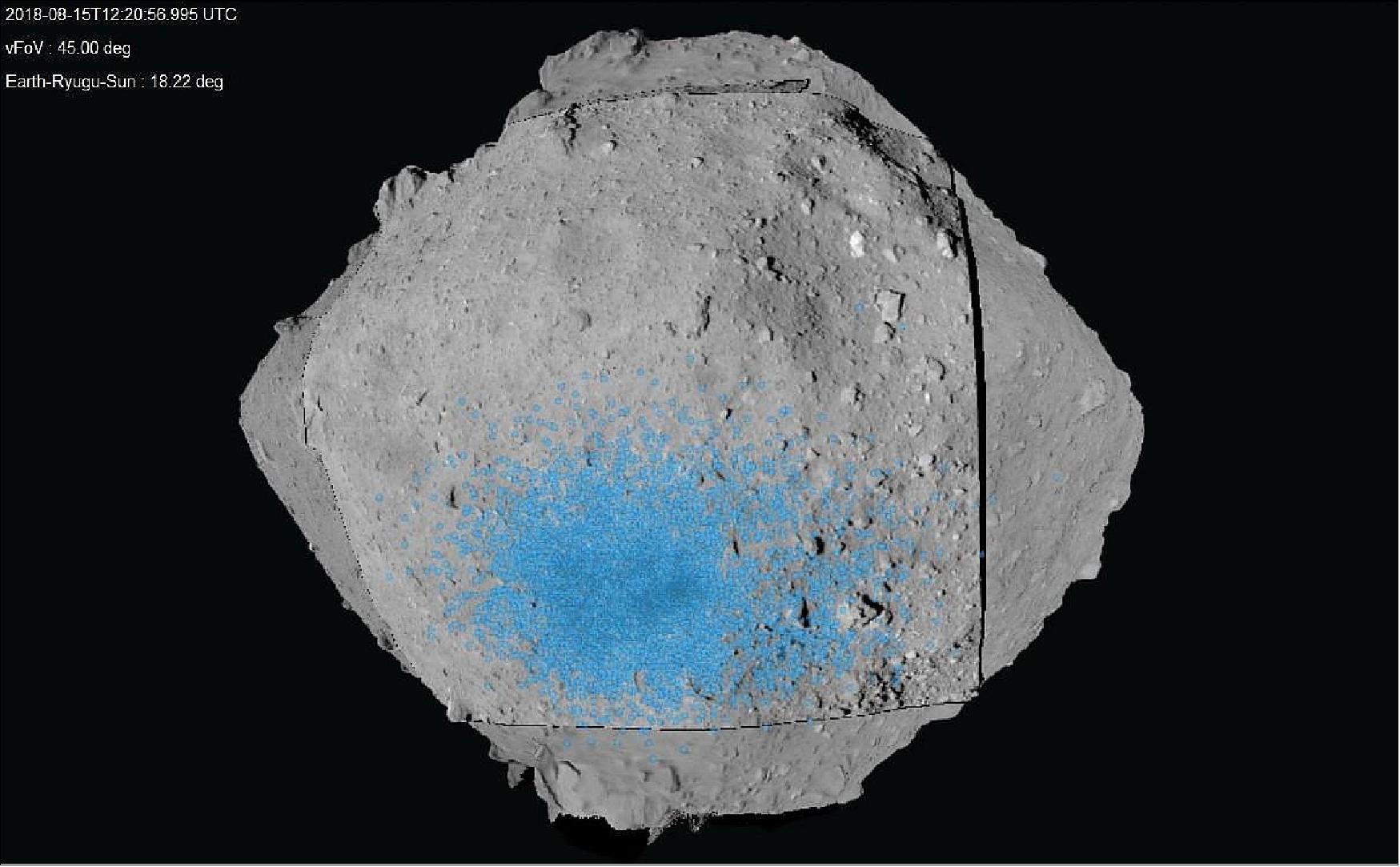
- MASCOT does not use solar cells but is equipped with a lithium primary battery built into the lander. The duration of the battery is about 16 hours (about two rotations of Ryugu), allowing MASCOT to operate continuously for two Ryugu days after a successful separation. Operation of the lander will end when the battery runs out.
• September 27, 2018: The MINERVA-II1 rovers were deployed on September 21 to explore the surface of asteroid Ryugu. Here is the second report on their activities, following our preliminary article at the start of this week. We end this report with a video taken by one of the rovers that shows the Sun moving across the sky as seen from the surface of Ryugu. Please take a moment to enjoy “standing” on this new world. 72)
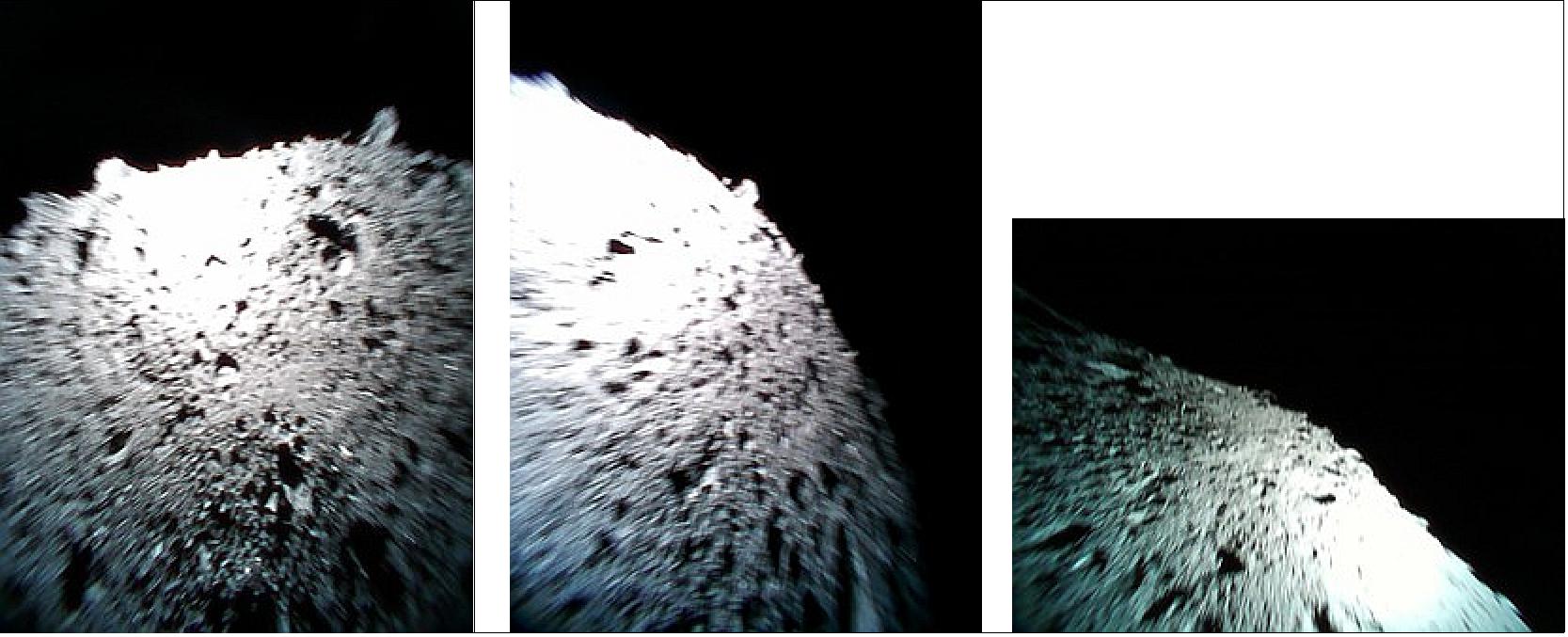



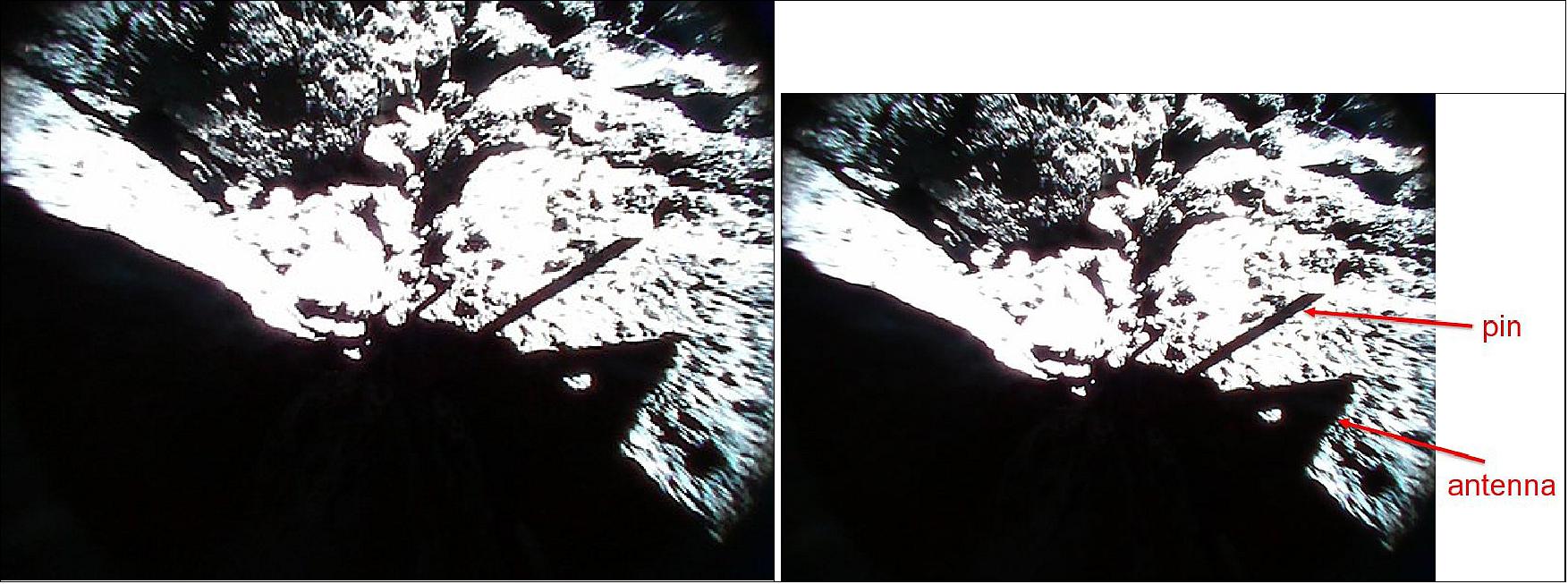
The pins on the MINERVA-II rovers have three roles:
1) To increase friction when hopping
2) Protect the solar cells during landing
3) A few of the pins also have a temperature sensor, so surface temperature can be measured directly.
• On 21 September 2018, 180 million miles ( 290 million km) from Earth, a roughly 1.5 m2 cube descended towards a primitive space rock. After years of planning and 4 years in flight, this tiny spacecraft captured this ‘shadow selfie’ as it closed in on asteroid Ryugu, just 80 m from the remnant of our Solar System’s formation, 4.6 billion years ago. 73)
- The Hayabusa-2 spacecraft is operated by JAXA (Japanese Space Agency) and supported in part by ESA's Estrack Malargüe deep-space tracking station in Argentina. The spacecraft carries four small landers that will investigate the asteroid’s surface, all four designed to gently fall onto the surface of the rocky boulder, taking advantage of its low gravity environment.
- Around the time this remarkable picture was taken, the spacecraft released its two MINERVA-II1 rovers which have since successfully landed and demonstrated an ability to hop around this rock-strewn body.
- "I cannot find words to express how happy I am that we were able to realize mobile exploration on the surface of an asteroid" enthused Yuichi Tsuda, Hayabusa-2 Project Project Manager, "I am proud that Hayabusa-2 was able to contribute to the creation of this technology for a new method of space exploration by surface movement on small bodies."
- The next stage will see the Mobile Asteroid Surface Scout (MASCOT) lander released onto the asteroid’s surface. Developed by the German Aerospace Center (DLR) in cooperation with the French Space Agency (CNES) MASCOT has enough power for a 12-hour mission, in which it will analyze the asteroid’s surface at two different sites.
- The Hayabusa-2 spacecraft itself will collect three samples from Ryugu, bringing them back to Earth in December 2020. These strange specimens will provide insights into the composition of this carbonaceous asteroid — a type of space rock expected to preserve some of the most pristine materials in the Solar System.
- As well as hopefully shining light on the origin and evolution of the inner planets, and the sources of water and organic compounds on Earth, this knowledge should help in efforts to protect our planet from marauding masses that come too close for comfort to our home planet.
- Understanding the composition and characteristics of near-Earth objects is vital to defending ourselves from them, if one were to head in our direction. ESA’s proposed Hera mission to test asteroid deflection is an ambitious example of how we can get to know these ancient bodies better, all in the name of planetary defence.
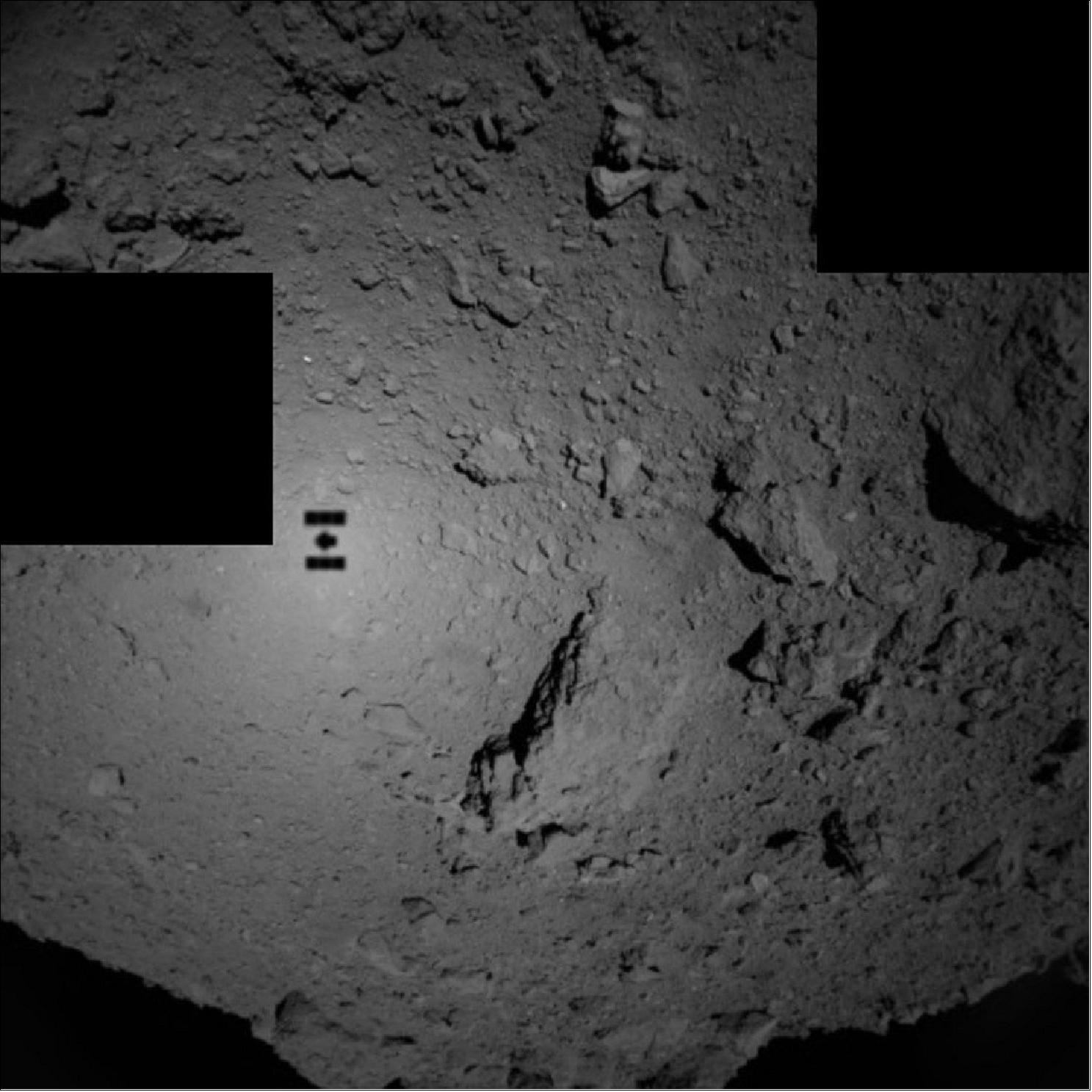
• On 21 September 2018, the small compact MINERVA-II1 rovers separated from the Hayabusa-2 spacecraft (time of separation was 13:06 JST). The MINERVA-II1 consists of two rovers, Rover-1A and Rover-1B. We have confirmed both rovers landed on the surface of asteroid Ryugu. The two rovers are in good condition and are transmitting images and data. Analysis of this information confirmed that at least one of the rovers is moving on the asteroid surface. 74)
- MINERVA-II1 is the world’s first rover (mobile exploration robot) to land on the surface of an asteroid. This is also the first time for autonomous movement and picture capture on an asteroid surface. MINERVA-II1 is therefore “the world’s first man-made object to explore movement on an asteroid surface”. We are also delighted that the two rovers both achieved this operation at the same time. "Each of the rovers is operating normally and has started surveying Ryugu's surface," JAXA said in a statement.
- Taking advantage of the asteroid's low gravity, the rovers will jump around on the surface — soaring as high as 15 m and staying in the air for as long as 15 minutes — to survey the asteroid's physical features. 75)
- "I am so proud that we have established a new method of space exploration for small celestial bodies," said JAXA project manager Yuichi Tsuda.

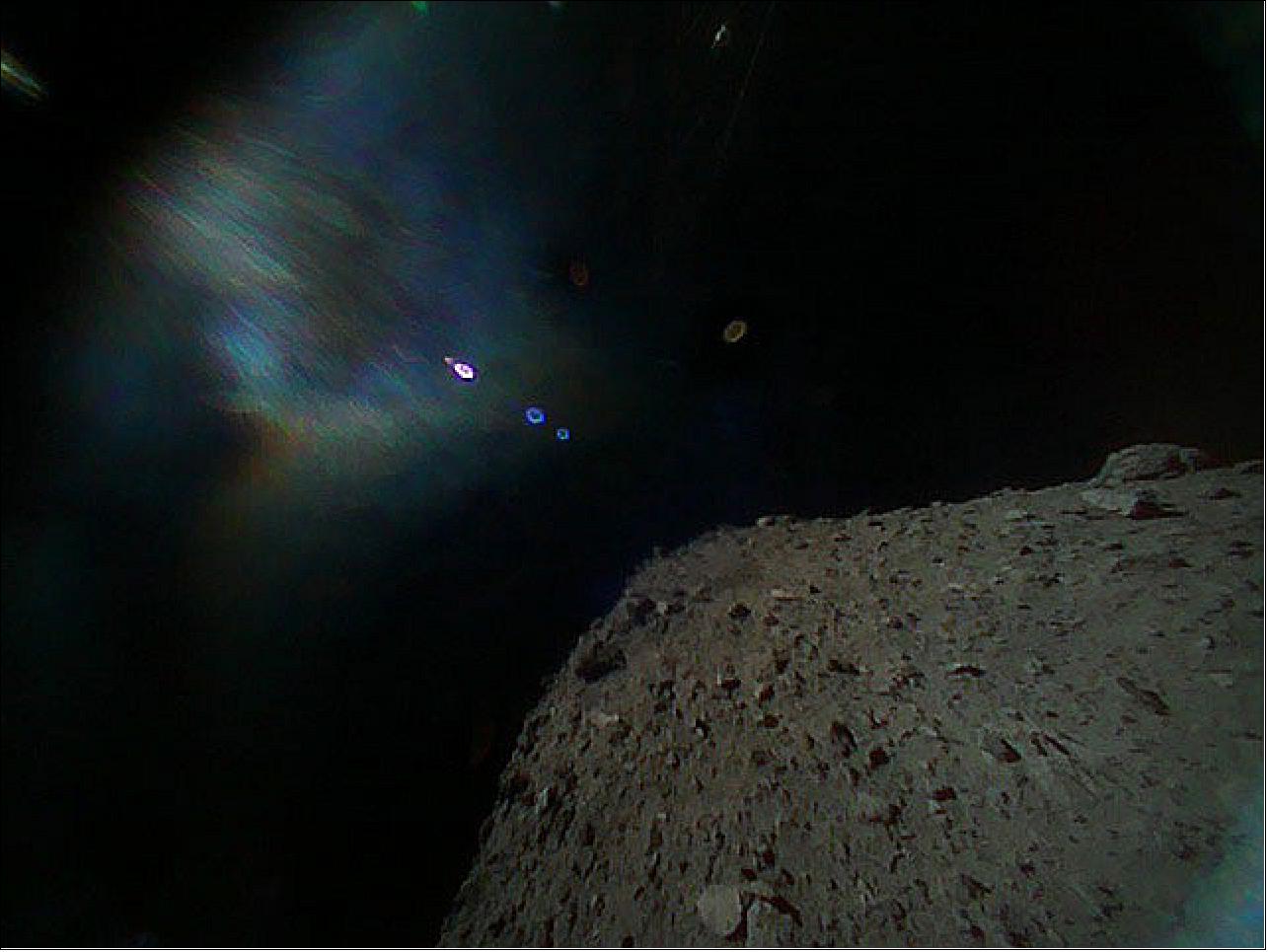
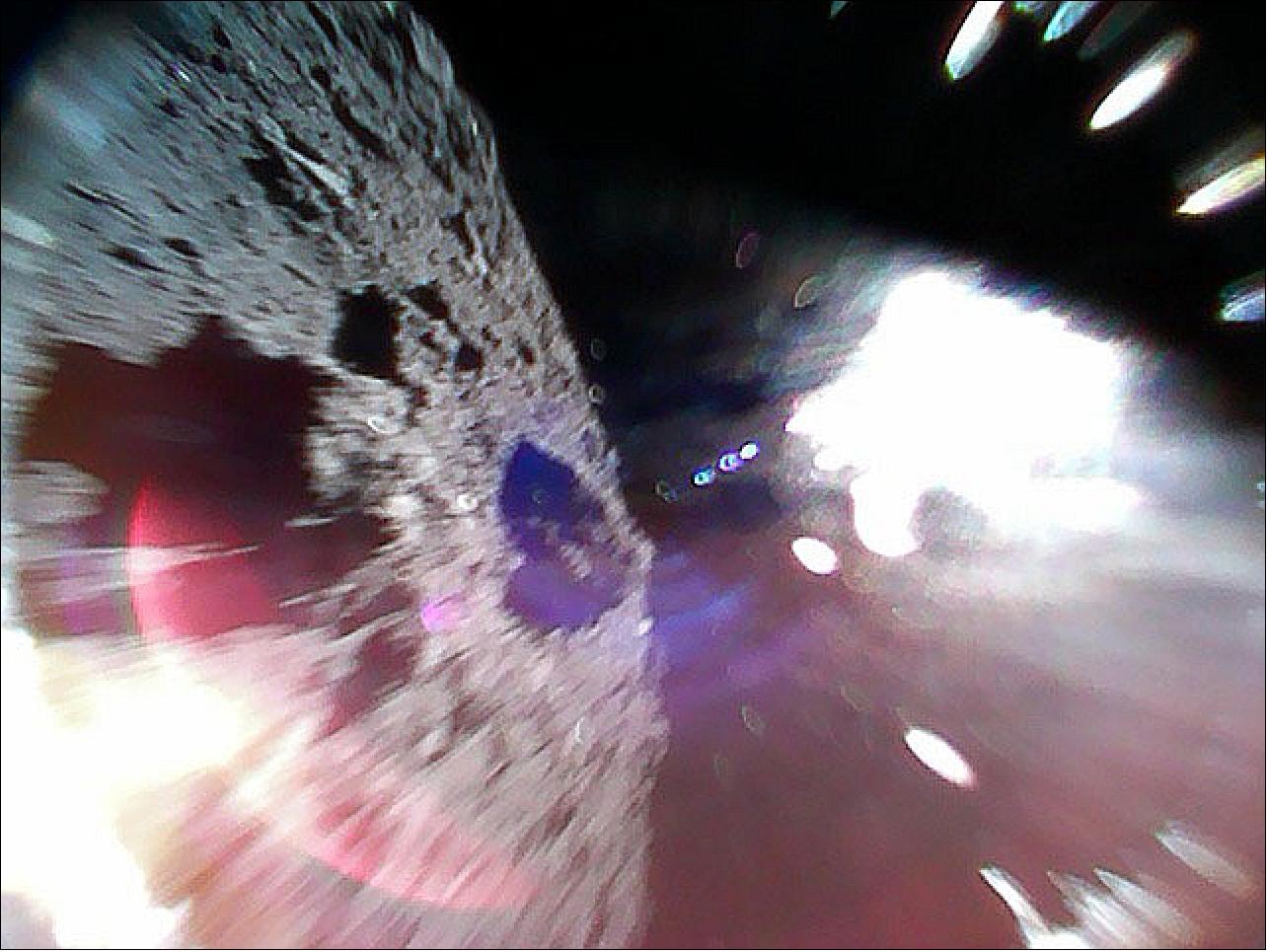
The MINERVA-II1 cameras can shoot in color. In Figure 93, although the image is blurred due to the rover rotating, you can clearly see the body of Hayabusa-2 and the paddle of the solar cells. The solar paddle appears blue. In Figure 95, the image was taken during a hop on the surface and you can feel this dynamic movement.
Operation of MINERVA-II1 will continue from now on. We are planning to acquire more data for analysis.
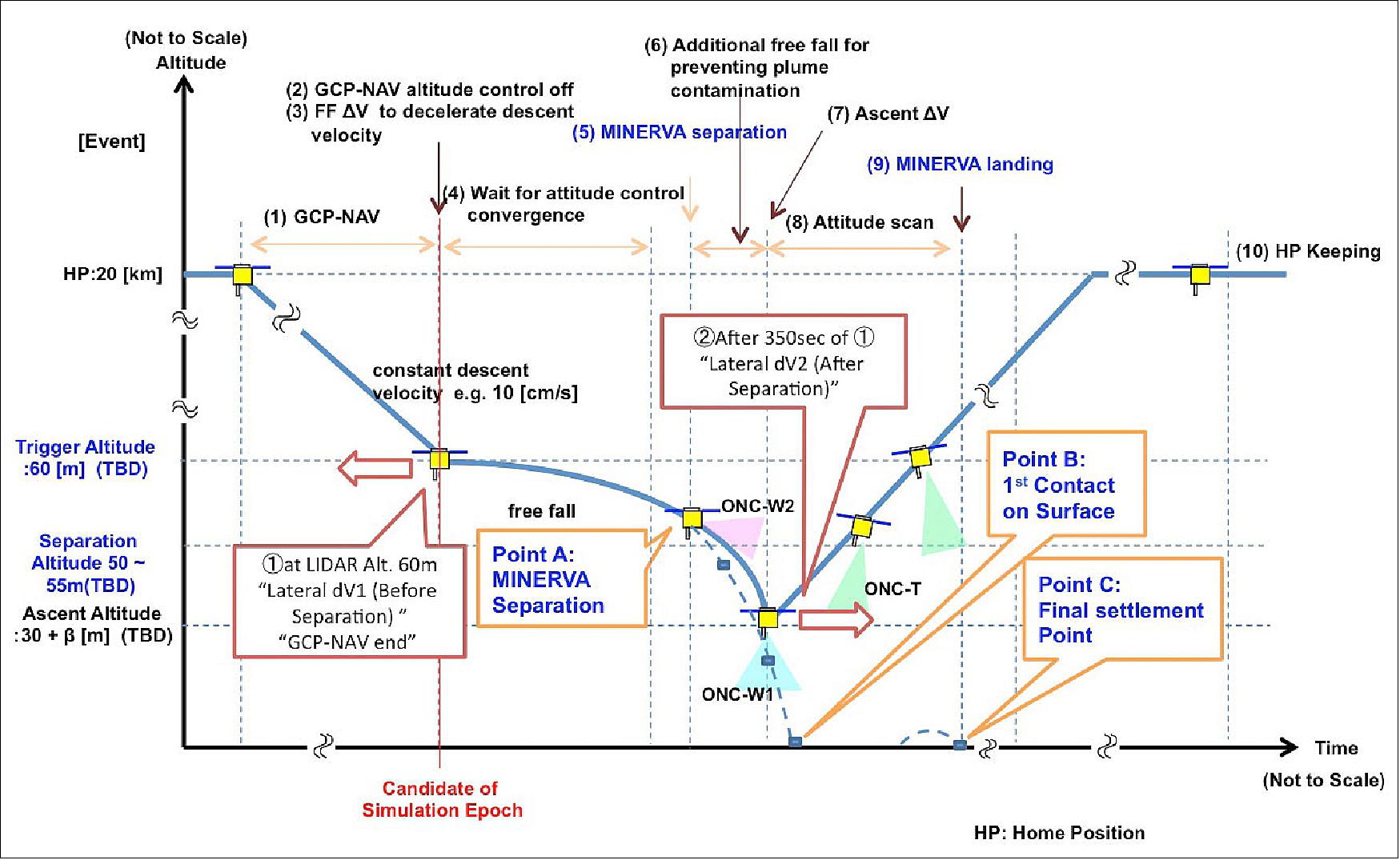
Legend to Figure 96:
- dV, ΔV: acceleration of the spacecraft
- free fall: The speed of the spacecraft is not controlled, but falls due to the pull of Ryugu’s gravity.
- GCP-NAV: Ground Control Point Navigation, tool for image guided navigation during the descent operation.
- HP: home position
- LIDAR: laser altimeter
- ONC-T: Optical Navigation Camera Telescopic (installed on the bottom of the spacecraft).
- ONC-W1: Optical Navigation Camera Wide angle (installed on the bottom of the spacecraft).
- ONC-W2: Optical Navigation Camera Wide angle (installed on the side of the spacecraft).
- Attitude scan: change the attitude of the probe to photograph MINERVA-II1
- constant descent velocity: the spacecraft descends at a nearly constant speed. At first, this speed is about 40 cm/s. From an altitude of about 5 km, the speed is about 10 cm/s.
- Trigger Altitude: when this altitude is reached, the spacecraft’s speed will be controlled.
- Additional free fall for preventing plume contamination: the spacecraft will not use thrusters during the period shown in the figure when MINERVA-II1 is in free fall. This is to avoid thruster gas hitting MINERVA-II1.
• August 23, 2018: Landing sites of the Hayabusa-2 mission on the asteroid Ryugu determined: 76)
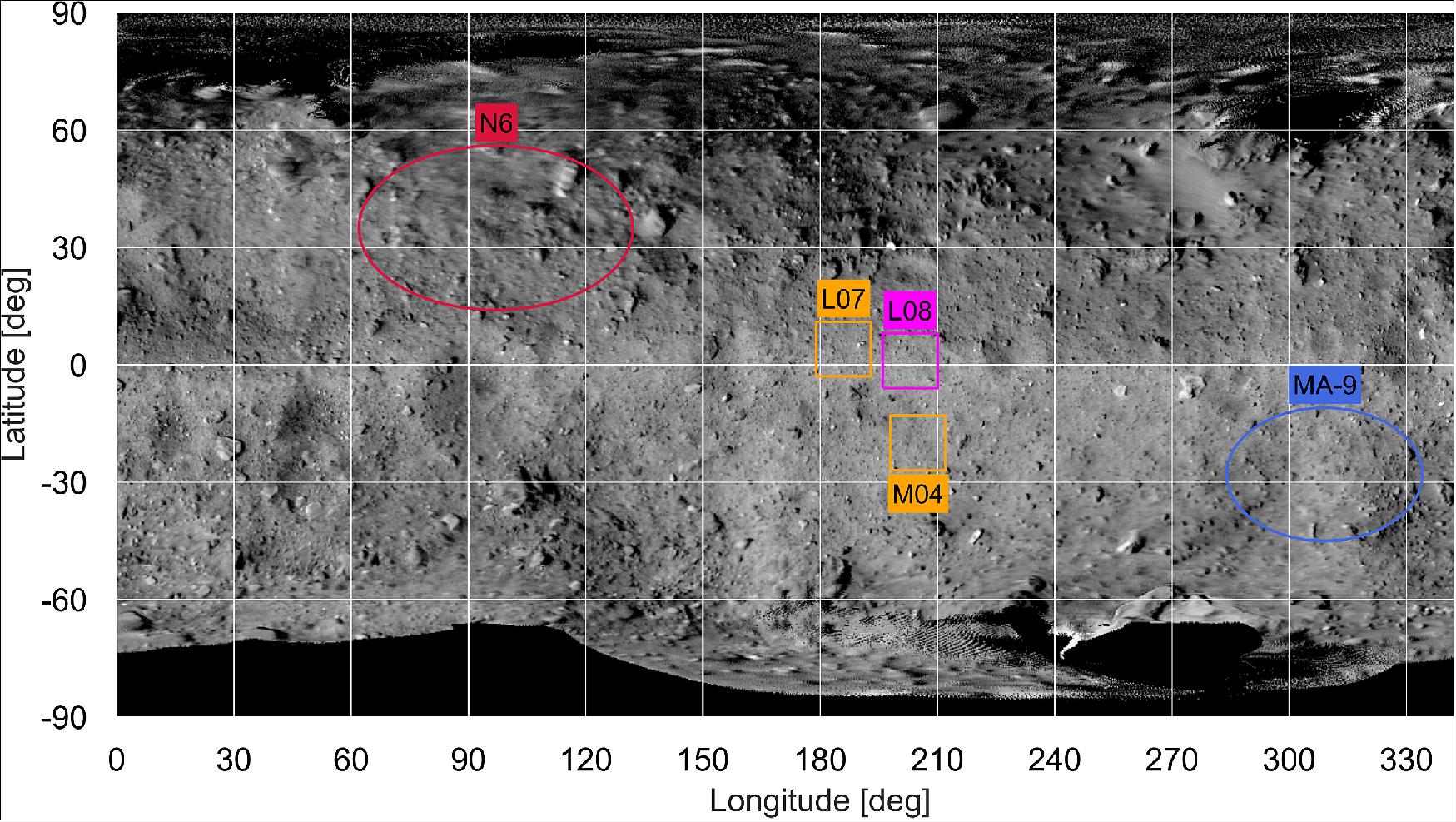
• July 25, 2018: Hayabusa-2 arrived at asteroid Ryugu on June 27, after which the spacecraft remained at a distance of about 20 km (the Home Position) to continue to observe the asteroid. During this time, the spacecraft was maintaining a hovering altitude of 20 km above the asteroid surface. — In the week of July 16, operations were begun to lower this orbiting altitude, eventually bringing the spacecraft to less than 6 km from the asteroid surface. One of the images taken at that time is shown in Figure 98. 77) 78)
- The resolution in Figure 98 is about 3.4 times higher than the images taken from the Home Position so far. One pixel in Figure 98 corresponds to about 60 cm. The largest crater on the surface of Ryugu is situated near the center of the image and you can see that it has a shape like a "mortar". You can also see that the surface of Ryugu is covered with a large number of boulders. This picture will provide important information as we choose the landing site.
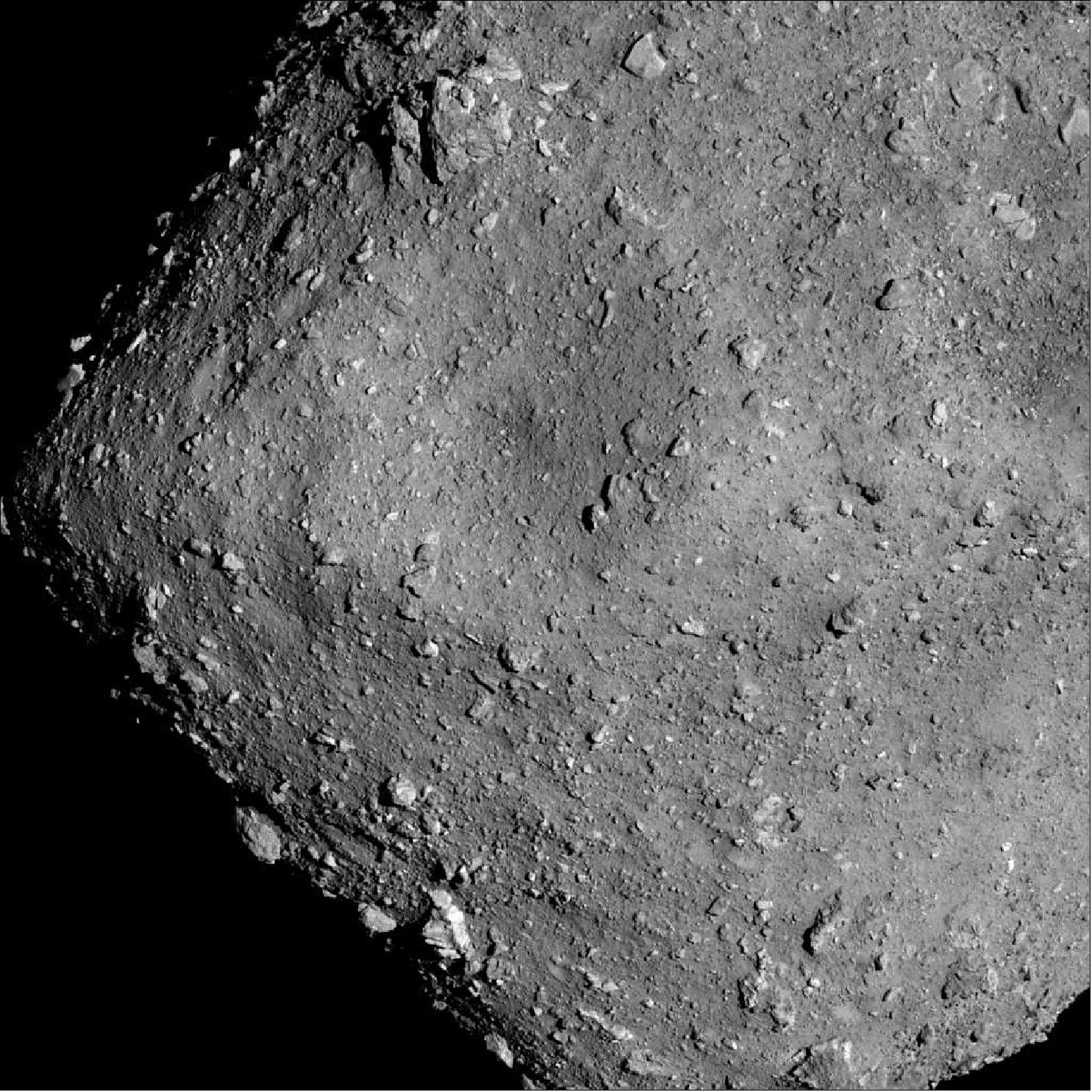
- The activity at this lowered altitude is called a "BOX-C operation". In the Hayabusa-2 Project, we define three regions for spacecraft operations above Ryugu; BOX-A, BOX-B and BOX-C. A diagram of these operation regions is shown in Figure 99.
- BOX-A corresponds to the Home Position, with an altitude of about 20 km. BOX-B is at same altitude as BOX-A, but the spacecraft can now move ±10 km forwards, backwards, left and right. BOX-C has the same dimensions at BOX-A front-to-back and left-to-right, but this region contains an altitude down to about 5 km from the asteroid surface. We define the coordinate system here as the Home Position coordinate system. To understand this system, take a look at Figure 100. The important point is that the Z-axis always points in the direction away from the asteroid towards the Earth.
- During the last week, the project operated the spacecraft within BOX-C, descending slowly towards the asteroid from July 17. Hayabusa-2 orbited at the lowest altitude for one day from July 20. After conducting observations of Ryugu during this time, Hayabusa-2 began to ascend on July 21 and returned to BOX-A on July 25.
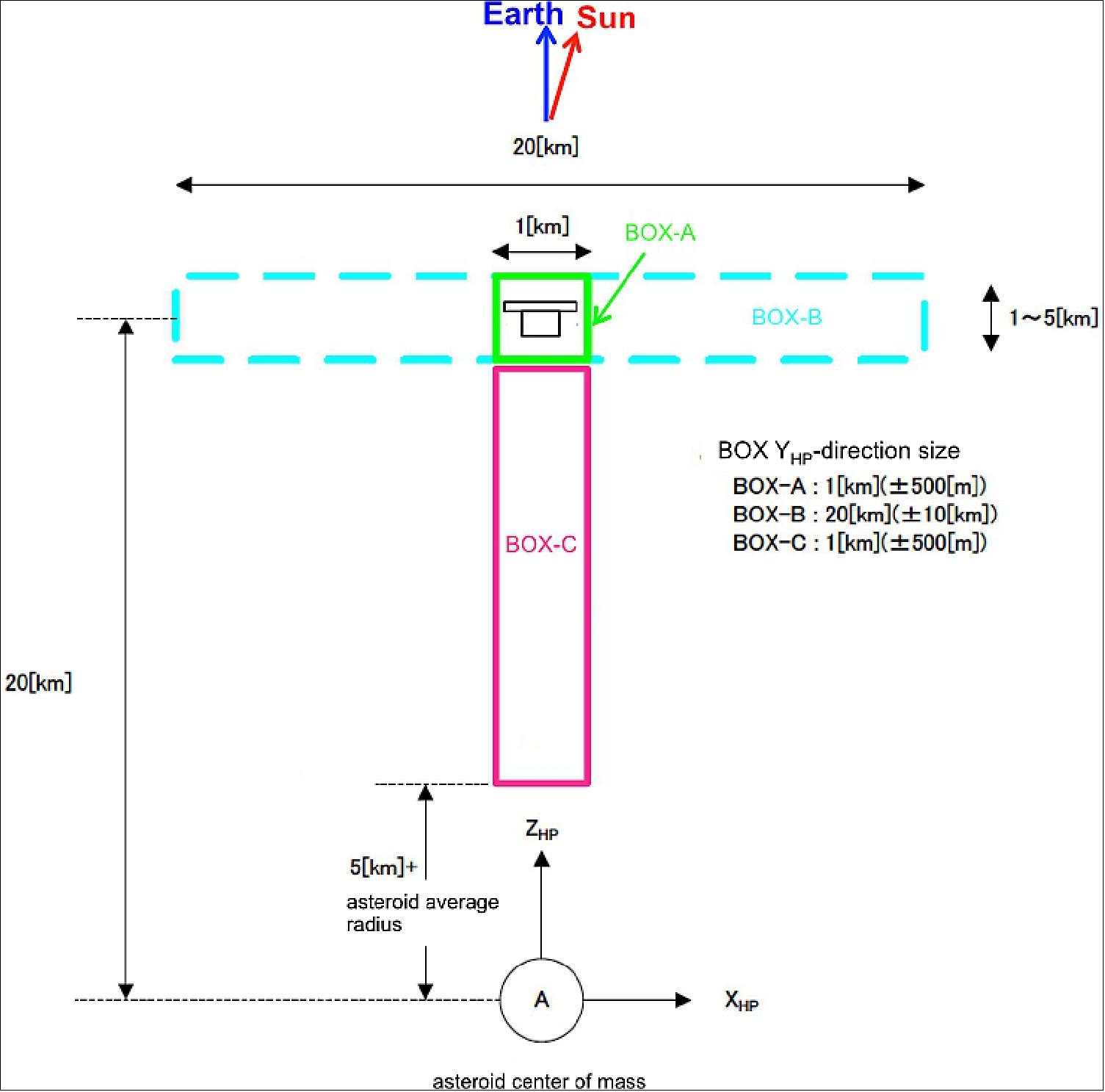
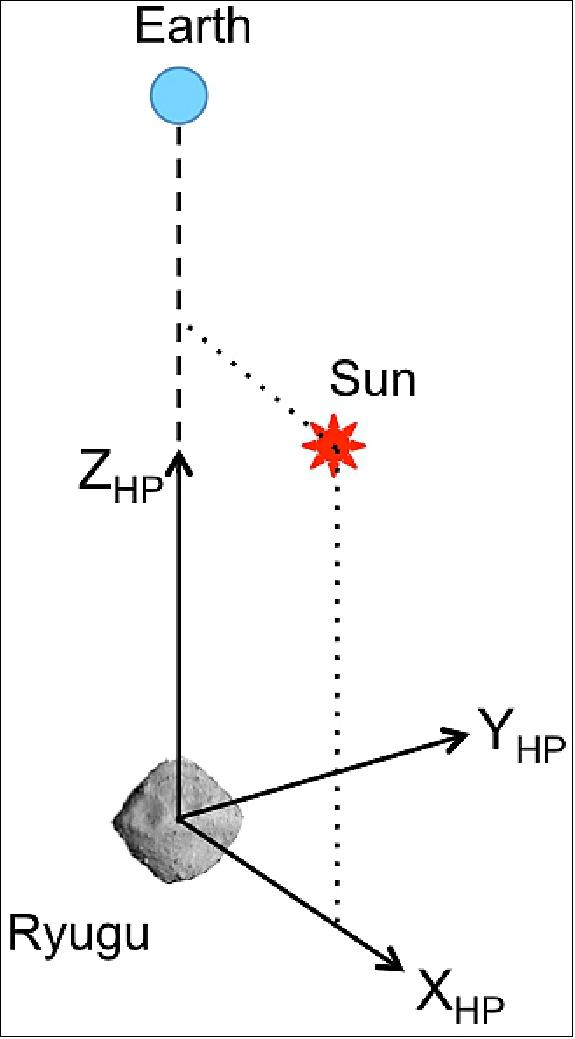
• August 14, 2018: In early October 2018, the Mobile Asteroid Surface Scout (MASCOT) lander is expected to be in operation for approximately 16 hours on the Ryugu asteroid. The selection of the landing site will take place this August. The ideal site must firstly offer the MASCOT team engineers excellent conditions for a safe landing and stable operation on the asteroid, while providing the researchers with a wealth of new and productive measurements. The lander made its way to the asteroid on board the Japanese Hayabusa-2 space probe, carrying four instruments that will examine the celestial body directly on the surface. The German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt, DLR) is contributing the MASCOT Camera (MasCam), which will acquire the first images during the descent to the asteroid and is intended to investigate the area around the landing site, in addition to the fine structure of the surface. DLR is also providing the MARA radiometer, which will measure the temperature on the asteroid's surface, among other things. The Technical University of Braunschweig will use the MasMag magnetometer to research the magnetization of the asteroid, while the French space agency CNES (Centre National d'Etudes Spatiales) will analyze the minerals and rocks on Ryugu using the MicrOmega spectrometer. Ralf Jaumann from the DLR Institute of Planetary Research is supervising the MasCam camera experiment and is the Principal Investigator of the MASCOT lander. In this interview, he explains what a suitable landing site may look like and what the scientists expect to find on the asteroid. 79)
• June 28, 2018: After a 42-month journey, Japan's Hayabusa-2 spacecraft arrived at asteroid 162173 Ryugu, 300 million km from Earth, on 27 June at 00:35 GMT. This remarkable achievement was confirmed when the spacecraft closed to just 20 km from the 1 km-diameter asteroid's surface, having entered a critical phase of this ambitious mission. 80)
- The confirmation of the Hayabusa-2 rendezvous, made at 9:35 a.m. (Japan Standard Time, JST), is based on the following data analyses: 81)
a) The thruster operation of Hayabusa-2 occurred nominally
b) The distance between Hayabusa-2 and Ryugu is approximately 20 kilometers
c) Hayabusa-2 is able to maintain a constant distance to asteroid Ryugu
d) The status of Hayabusa-2 is normal
- From this point, JAXA is planning to conduct exploratory activities in the vicinity of the asteroid, including scientific observation of asteroid Ryugu and surveying the asteroid for sample collection.
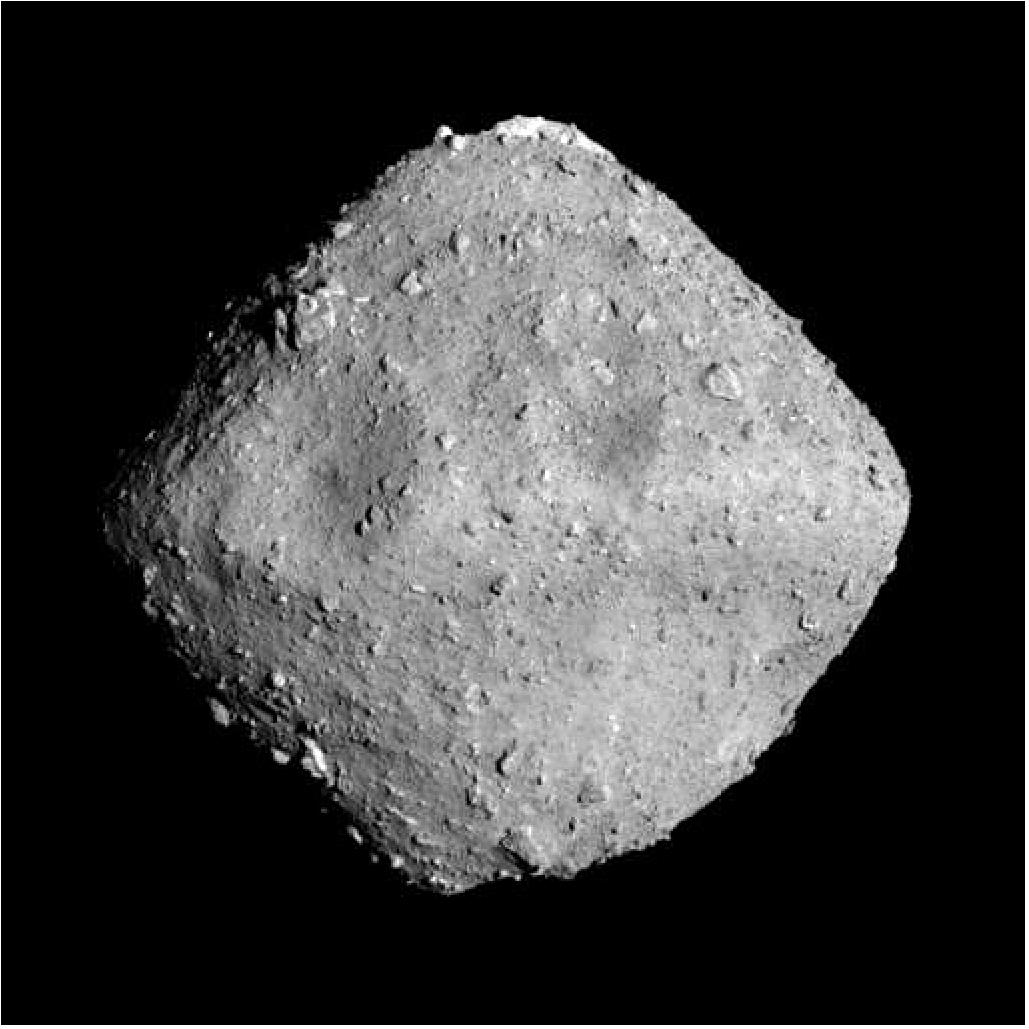
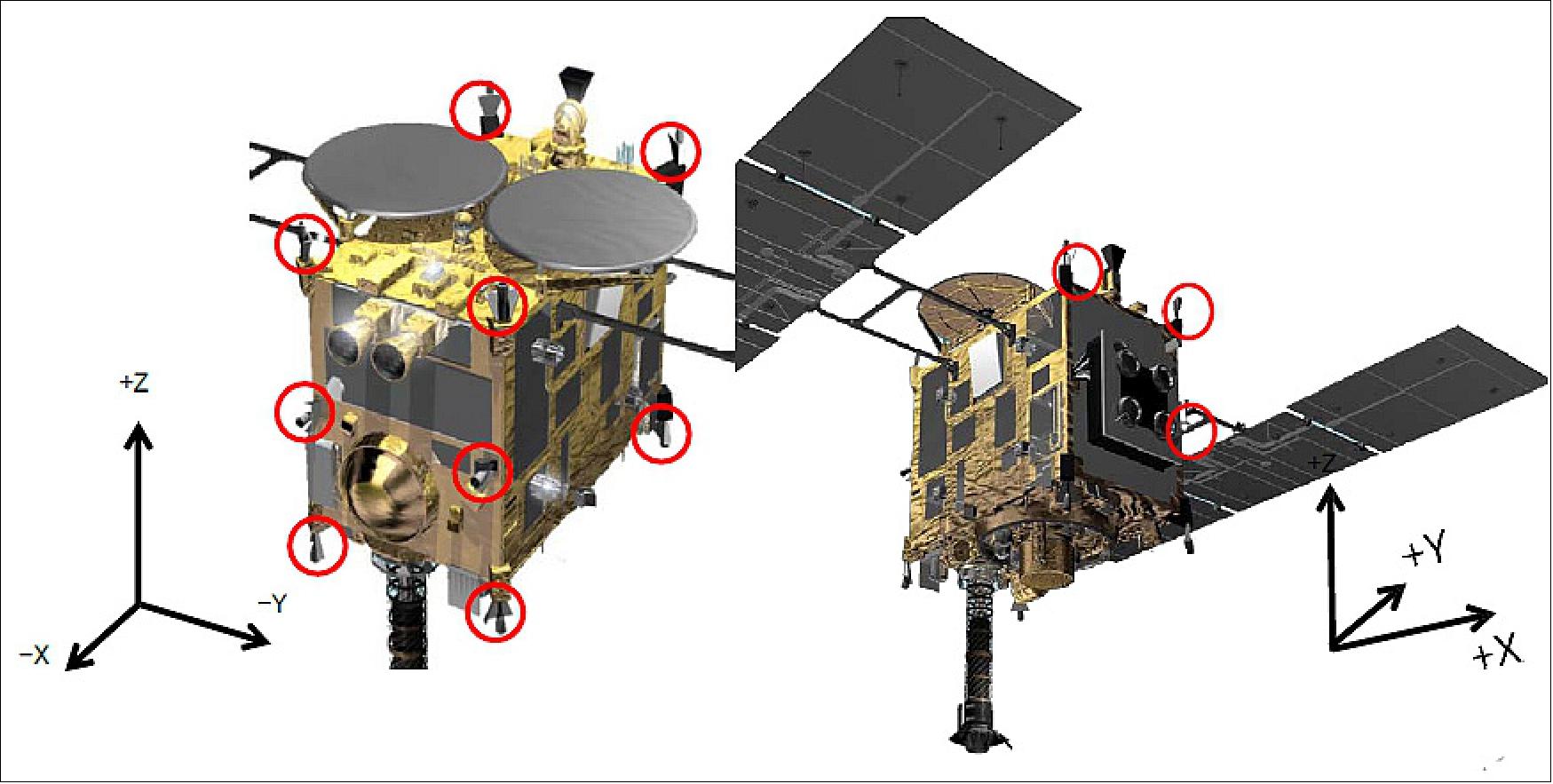
- Hayabusa-2 aims to study Ryugu in detail, deposit a European and a series of Japanese landers on the surface and return a sample of ancient rock to Earth in 2020.
- "Together with all of you, we have become the first eyewitnesses to see asteroid Ryugu. I feel this amazing honor as we proceed with the mission operations," said Yuichi Tsuda, project manager of JAXA (Japan Aerospace Exploration Agency).
- In 2014-17, during Hayabusa-2's cruise phase from Earth to the asteroid, ESA's deep-space ground station at Malargüe, Argentina - part of the Agency's worldwide Estrack network - provided crucial communication support to the mission.
- In July this year, Malargüe will resume support, providing one communication contact session per week together with ESA's Cebreros station in Spain. The Malargüe station will also support the ESA-JAXA BepiColombo mission, due for launch in the autumn (Ref. 80).
• June 15, 2018: Hayabusa-2, JAXA's asteroid explorer, and the MASCOT lander, developed by the German Aerospace Center (DLR) and the French space agency (CNES) have been travelling through space since December 2014. They are finally closing in on their destination asteroid – Ryugu. As of 14 June 2018, the distance between Hayabusa-2 and Ryugu is less than 770 km and the closing speed is 2.1 m/s. 82) 83)
- On 13 June 2018, the 'Optical Navigation Camera – Telescopic' (ONC-T) acquired an image of Ryugu, where the asteroid extends to 10 pixels. The short exposure time means that the background star field is invisible.
![Figure 103: Left: An image of Ryugu acquired by the ONC-T on board Hayabusa-2 at around 13:50 JST (06:50 CEST, 04:50 UTC) on 13 June 2018. The distance to the asteroid is approximately 920 km and the field of view is 6.3º x 6.3º; the exposure time was 0.09 seconds. Right: enlarged section of left-hand image [image credit: JAXA, Kyoto University, Japan Spaceguard Association, University of Seoul, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, and AIST (National Institute of Advanced Industrial Science and Technology)]](https://eoportal.org/ftp/satellite-missions/h/Hayabusa2_280322/Hayabusa2_Auto29.jpeg)
- Earlier, the ONC-T also acquired an image with a much longer exposure time in which the background stars are visible.
![Figure 104: Image of Ryugu acquired by the ONC-T on board Hayabusa-2 on 13 June 2018 at 12:50 JST. The distance to the asteroid is about 920 km and the field of view is 6.3º x 6.3º; the exposure time was 178 seconds. Ryugu, which is visible against the constellation Gemini, is sufficiently bright that it has partially saturated the ONC-T sensor [image credit: JAXA, Kyoto University, Japan Spaceguard Association, University of Seoul, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, and AIST (National Institute of Advanced Industrial Science and Technology)]](https://eoportal.org/ftp/satellite-missions/h/Hayabusa2_280322/Hayabusa2_Auto28.jpeg)
- Arrival at Ryugu is scheduled for June 27.
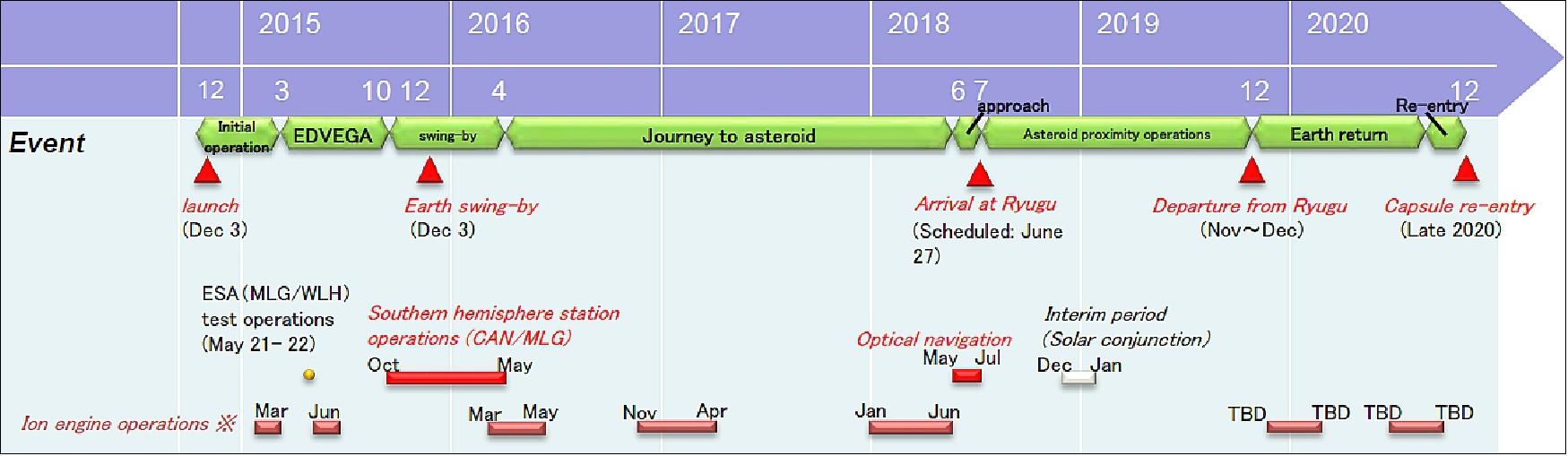
• On February 26, 2018, Hayabusa-2 saw its destination —asteroid Ryugu— for the first time! The photographs were captured by the ONC-T (Optical Navigation Camera - Telescopic) imager onboard the spacecraft (Figure 106). Images were taken between noon JST on February 26th and 9:00am the following morning, with about 300 shots taken in total. Data for nine of these images were transmitted from the spacecraft on February 27th, allowing us to confirm that Ryugu had indeed been seen. The animation shows these nine consecutive frames. 84) 85)
- Ryugu's brightness from Hayabusa-2 is about magnitude 9, which would be impossible to see with the naked eye but visible with the ONC-T. Looking at the image above, you can see how the position of the surrounding stars relative to Ryugu appears to change as Hayabusa-2 moves towards the asteroid. The distance between Ryugu and Hayabusa-2 when the images were taken is about 1.3 million km. Ryugu as seen from Hayabusa-2 is in the direction of the constellation Pisces.
- Ryugu was photographed when the Sun, Hayabusa-2 and Ryugu were almost in a line. This configuration can be seen in Figure 107, which shows a snapshot of the header from the Hayabusa-2 website on February 26, 2018, which continuously updates to show the position of Hayabusa-2. If you were to stand on Ryugu, Hayabusa-2 would be seen in the direction of the Sun.
- Hayabusa-2 is currently using its ion engine to make adjustments to its course. This makes it difficult to alter the orientation of the spacecraft. However, at the alignment shown in Figure 107, the ONC-T camera can image Ryugu without needing to make significant changes to the spacecraft's orientation. This made February 26th the perfect time to try and capture Ryugu's image with the ONC-T. From the data, Ryugu was observed to be exactly at the expected location based on Hayabusa-2's estimated position. This tells us that Hayabusa-2 is flying on the planned course.
- "Now that we see Ryugu, the Hayabusa-2 project has shifted to the final preparation stage for arrival at the asteroid. There are no problems with the route towards Ryugu or the performance of the spacecraft, and we will be proceeding with maximum thrust," explains Project Manager, Yuichi Tsuda.
- The remaining images will be transmitted back to Earth from the spacecraft and allow us to further confirm the asteroid and spacecraft location. Although we can currently see Ryugu only as a point, it is very exciting for the whole project team to catch sight of the destination!
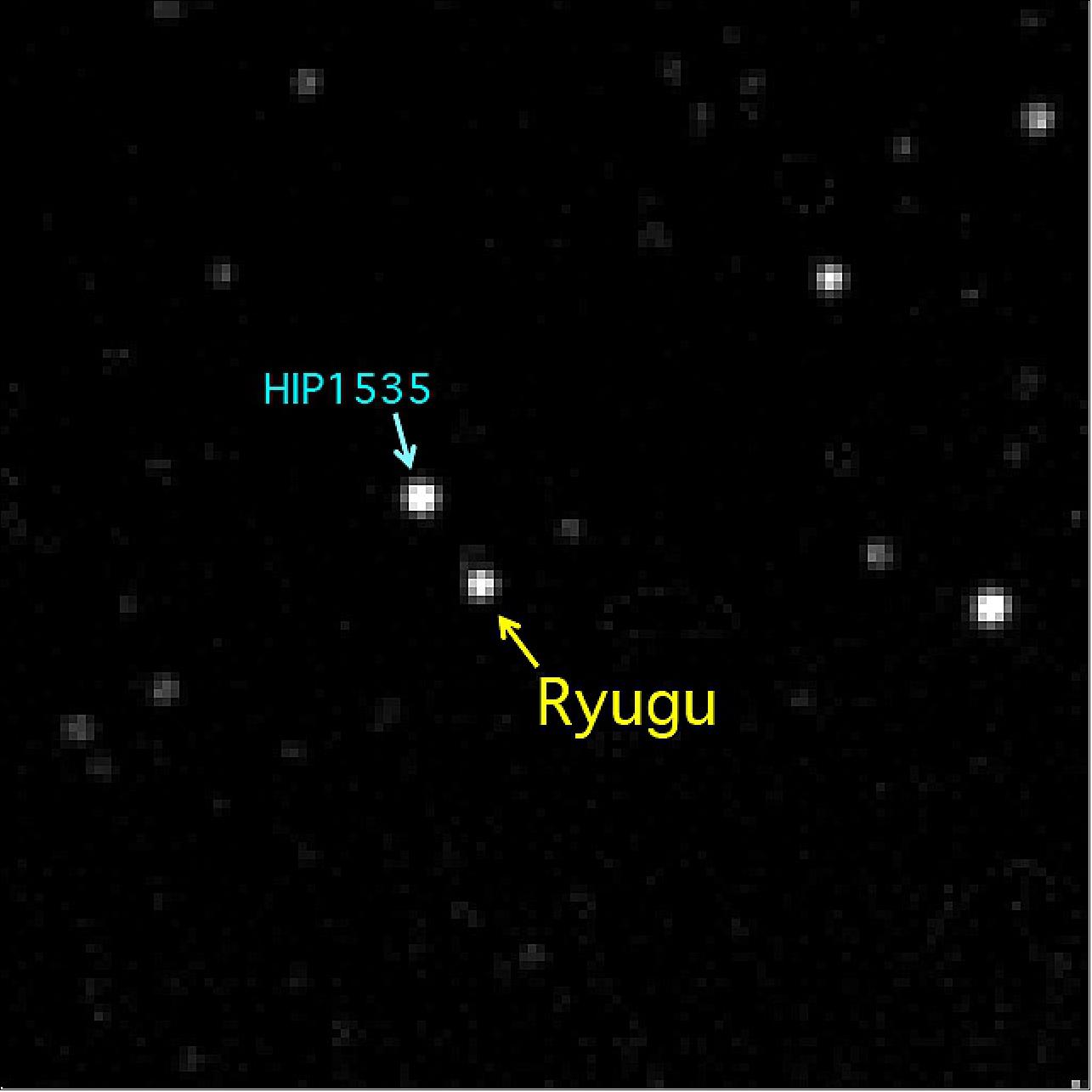
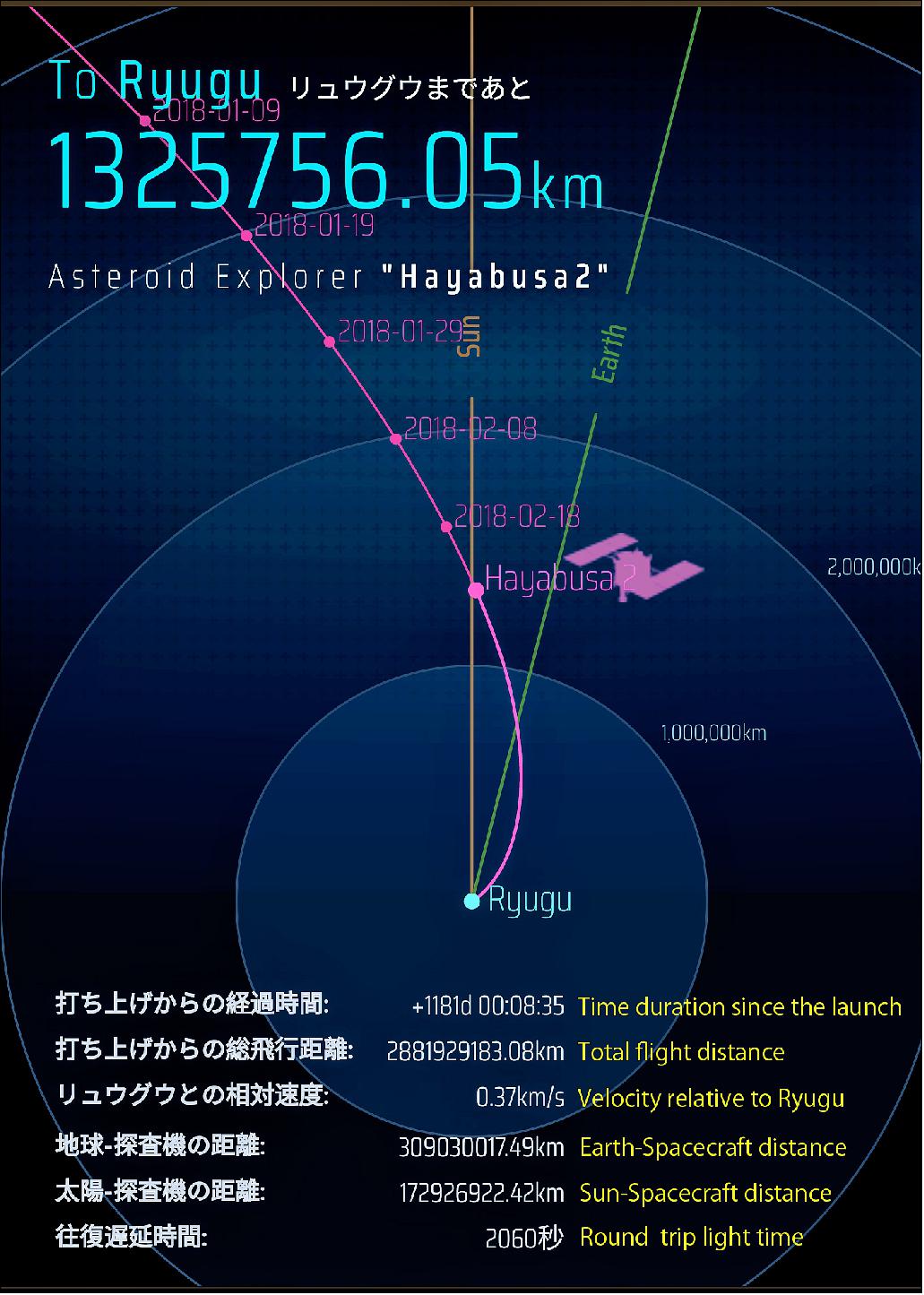
• As of September 2017, two of three IES (Ion Engine System) sessions have been completed. The first and second IES session, 798 hours and 2558 hours of IES operation was executed, respectively. The total IES operation time is about 3,900 hours and a velocity increment of about 580 m/s has been obtained. 86)
- In December 2017, the last IES session will be started and will continue until June 2018. After the completion of the third IES operation, the Hayabusa-2 spacecraft will arrive in the vicinity of Ryugu. Since there are large uncertainties on the asteroid ephemeris, the Hayabusa-2 spacecraft will perform an optical navigation campaign to reduce the relative position error to the asteroid. The direction of the asteroid will be determined by the ONC-T (Optical Navigation Camera - Telescopic) imager; if required, a series of guidance maneuvers with the RCS will be used to correct the trajectory toward the asteroid. A month of an optical navigation campaign is scheduled for this final approach phase.
- Hayabusa-2 will arrive at the asteroid vicinity in the summer of 2018. Hayabusa-2 will explore Ryugu for 1.5 years and return to the Earth in the winter of 2020. The 1.5 year allocation for proximity phase operations is much larger than the 3 months of Hayabusa's proximity operation, however the schedule is marginal. Three touchdown operations need to be planned within the limited amount of time to satisfy the mission success criteria.
- There are three main uncertainty parameters, which impact the schedule. Those are: gravity, thermal environment, and spin axis orientation of Ryugu.
- Firstly, the Ryugu gravity limits the number of descent operations. This is because the limitation of the fuel onboard and the fuel consumption per descent operation. The smaller the gravity constant, the less fuel requirement - thus, more descent attempts can be done. Currently, the porject assumes the gravity coefficient between 11 to 92 m3/s2. The "worst case" for the scheduling is the largest number of the descent operations, derived by the smallest gravity. The maximum number of descent operations is considered as a slot in the nominal schedule.
- Secondly, the thermal environment of the asteroid impacts the schedule. This constraint is the solar distance constraint for the TD (Touch Down) operation. There are upper constraints in the solar distance because the spacecraft temperature becomes too high when the spacecraft approaches the asteroid surface and receives the thermal inputs both from the asteroid as well as from the Sun. The current best estimate of Ryugu's thermal environment derived resulted in a touch down epoch requirement between October 2018 and May 2019; this corresponds with a 1.25 AU sun distance. This constraint will be updated after the Ryugu in-situ observation of Hayabusa-2 in the Summer of 2018.
- The third uncertainty parameter is the spin axis orientation of the asteroid. Although there is series of light curve observation of Ryugu from ground based telescope, the spin axis orientation is still uncertain. The spin axis impacts the Hayabusa-2 visibility of the asteroid. Since the Hayabusa-2 spacecraft stays in the vicinity of the Earth-asteroid line, the limited visible latitude is given as a function of spin axis. Assuming that the asteroid is a single spinner, the visible latitude varies due to the asteroid orbital motion around the Sun. The orbital motion changes the geometry between the asteroid and the Earth, therefore the visible latitude changes. — The accessible region for the descent operation also depends on the spin axis orientation. Due to the GNC limitation, the descent operation need to be done within 200 m from the asteroid-Earth line. This restriction describes the accessible latitude band as a function of time. Figure 108 illustrates the schematic image of the change of the visible area and accessible latitude band. The relative position in HP (Home Position) frame will change due to the orbital motion around the Sun.
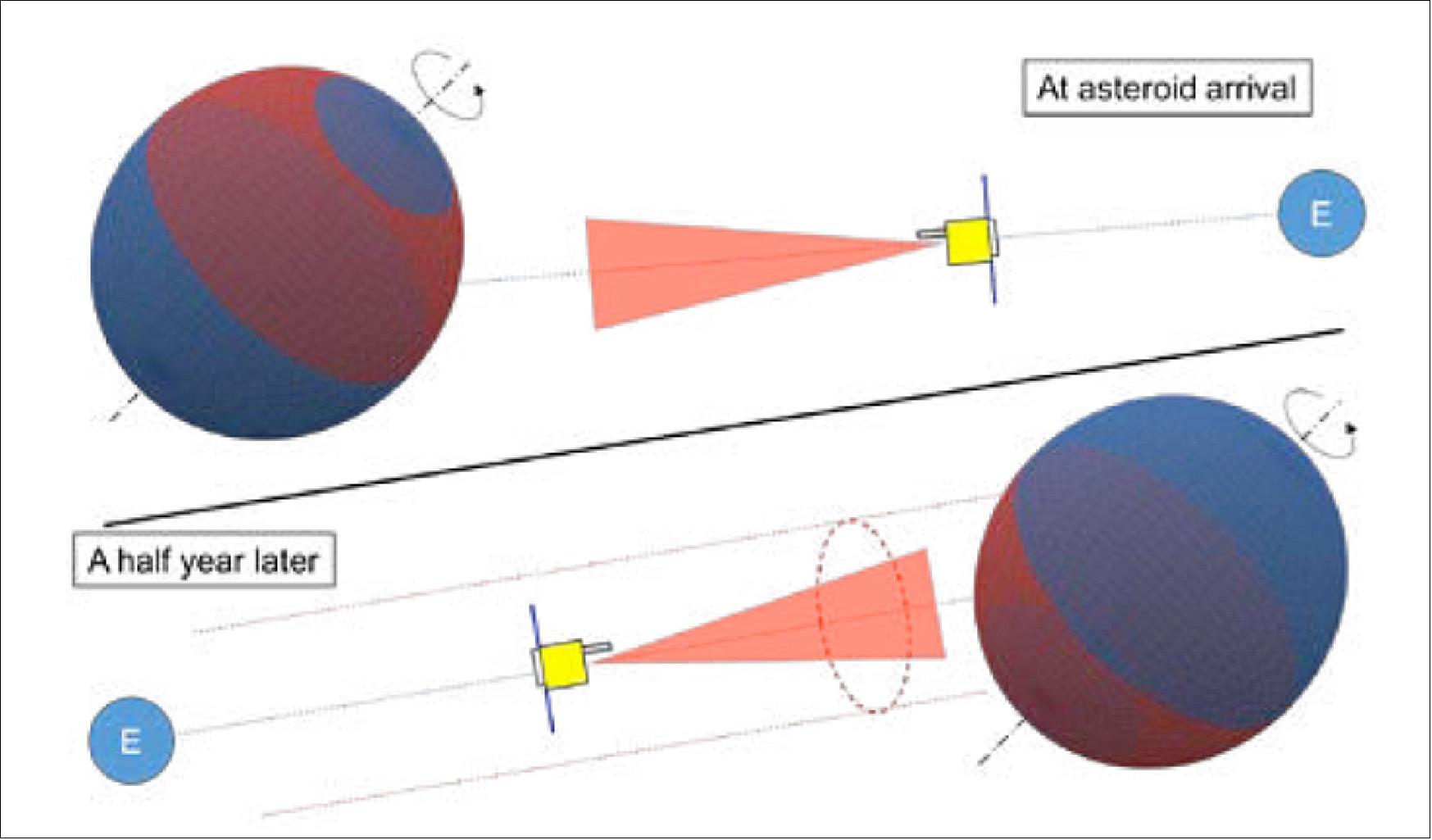
- Figure 109 describes the latitude band and visibility of a sample spin axis orientation. The blue region is the touch down or MASCOT release point accessible latitude band. The gray zone during the end of 2018 is the conjunction phase and neither observation nor critical operation can be performed. In this example, the accessible latitude before and after the conjunction have a large difference. 87)
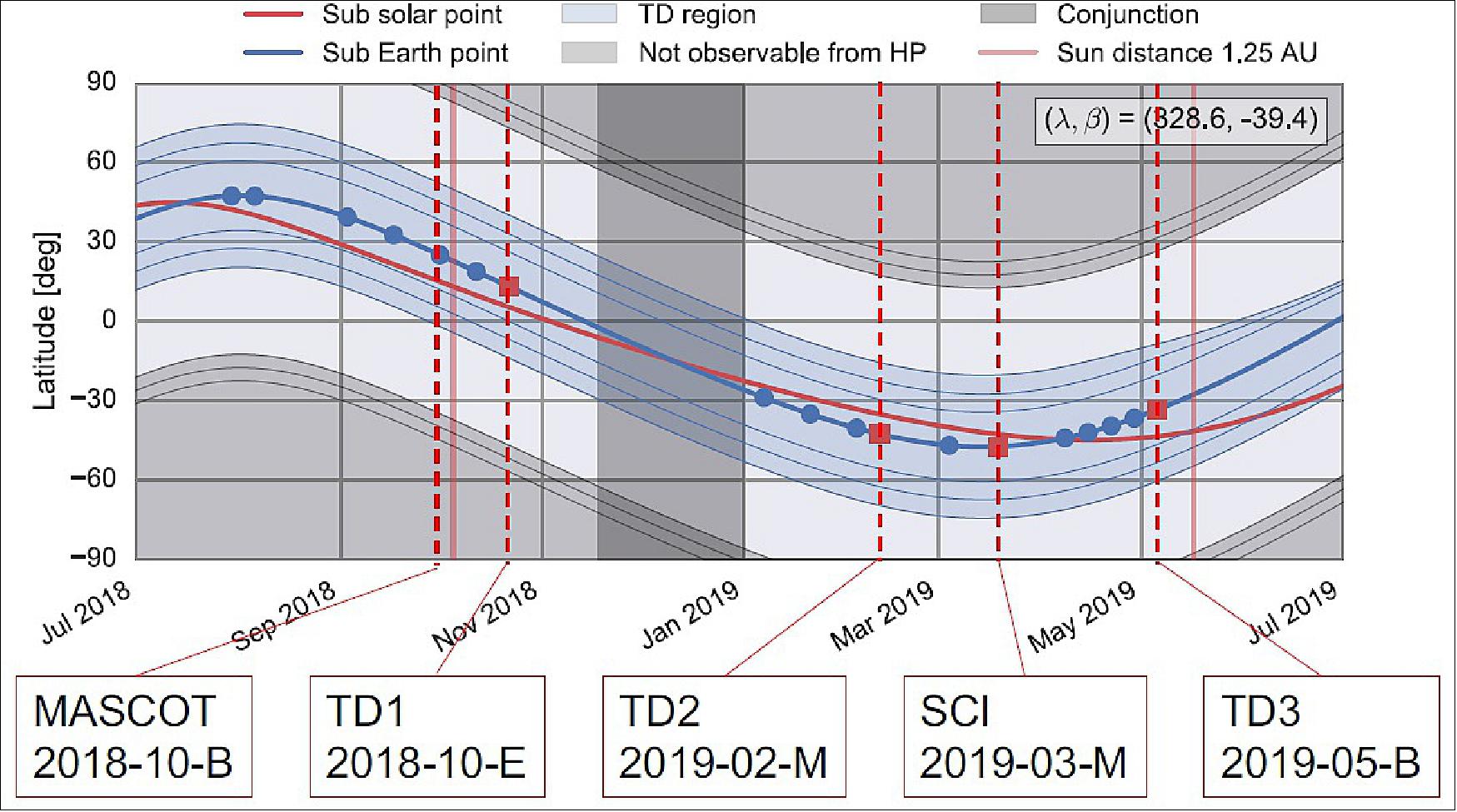
- Considering all three points, the nominal schedule is conducted as shown in Figure 110. The TD1 is allocated just before the conjunction (with margin). All the previous operations are derived by the TD1 operation. Especially, the landing site selection is the most important input for the operation.
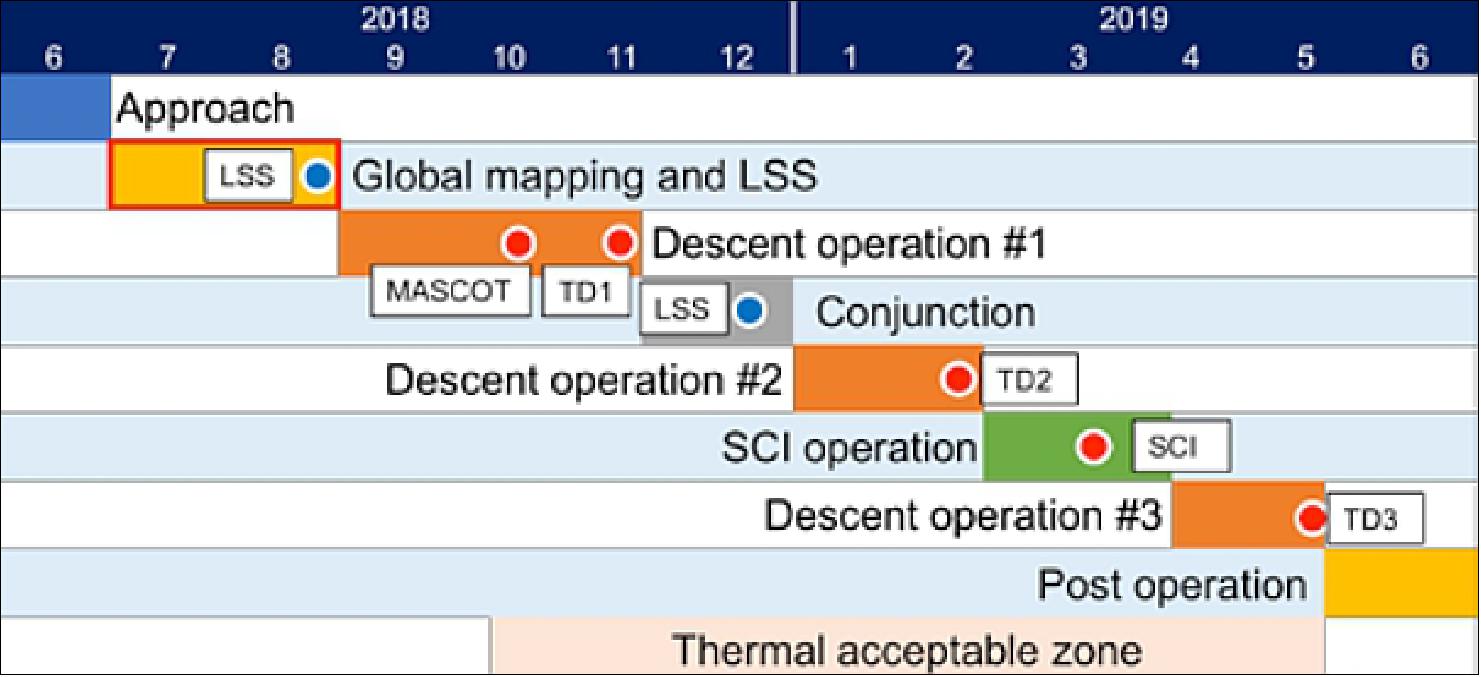
Legend to Figure 110: LSS =Landing Site Selection, SCI =Small Carry-on Impactor.
• As of September 2016, 1346 hours of the ion engine operation have been achieved as planned. Three touch downs/sample collections, one kinetic impact/crater generation, four surface rovers deployment and many other in-situ observations are planned in the asteroid proximity phase. The operation team will perform extensive operation practice/rehearsal using a hardware-in-the-loop simulator in the year 2017 to be ready for the asteroid arrival in the summer 2018. 88)
Period | IES run time | Thrusters used | ΔV | Comment |
March 3-21, 2015 | 409 hr | A+D | 44 m/s | Trajectory control |
May 12-13, 2015 | 24 hr | A+C+D | 4 m/s | 3-thruster operation test |
June 2-6, 2015 | 102 hr | A+D | 11 m/s | Trajectory control |
September 1-2, 2015 | 12 hr | A+D | 1.3 m/s | TCM for EGA targeting |
EGA (Earth Gravity Assist) | — | — | — | — |
March 22-May 5, 2016 | 795 hr | A+C+D | 127 m/s | Trajectory control |
May 20-21, 2016 | 3 hr | A+D | 0.3 m/s | Trajectory control |
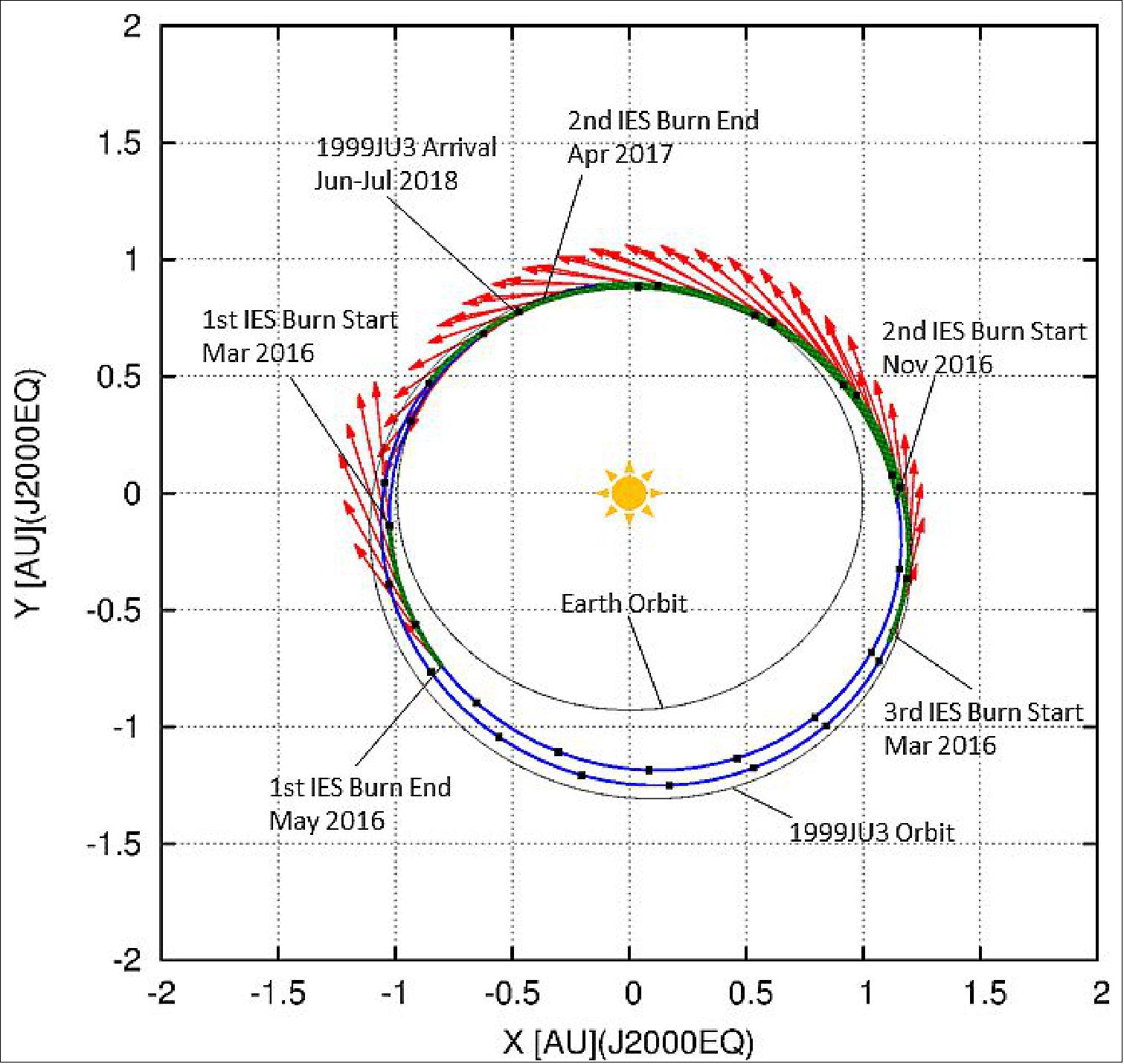
- Hayabusa-2 adopts a novel attitude control technique called “Solar Sail Mode” for reliable and fuel-efficient attitude operation. 89) It is used in ballistic cruise periods and realizes a coarse Sun pointing attitude using one RW only and actively utilizing SRP (Solar Radiation Pressure). The last 1 month of the commissioning phase from January 24 until March 2 was dedicated to the SRP torque characterization and Solar Sail Mode attitude control testing/demonstration, which was completed successfully.
- Forward Cruise Operation: Hayabusa-2 started the forward cruise phase (cruise from Earth to Ryugu) on March 3, 2015, following the completion of the commissioning phase. Total of approximately 7000 hours IES operation is planned to reach Ryugu. Table 7 shows the history of the IES operation from launch until present. Figure 111 shows the trajectory from EGA to Ryugu arrival with the IES thrust vector history.
- Ballistic flight phase (cruise without IES operation) is effectively utilized for precise navigation, regular onboard instruments checkout/calibrations, and engineering demonstration/testing. For example, Mars observation campaign was conducted from May 28-June 9, 2016 at the closest distance (41 million km) for ONC/TIR/NIRS3 calibration purpose. The Ka-band operation between Hayabusa-2 and an ESA’s deep space station (ESTRACK Malargue station in Argentina) was conducted successfully on July 5-8, 2016. The Ka-band DDOR was tested several times using NASA(DSN) and ESA(ESTRACK) stations and achieved the world-first successful inter-agencies operation of the Ka-band DDOR under the CCSDS (Consultative Committee for Space Data Systems) DDOR operation standard. Besides testing, X-band DDOR is regularly used for precise orbit determination in ballistic cruise periods.
- EGA (Earth Gravity Assist) operation: Hayabusa-2 performed the EGA on December 3, 2015. Four TCMs (Trajectory Correction Maneuvers) were planned and three were actually conducted. The final TCM was canceled because the spacecraft had already been guided accurately with the three TCMs. Table 7 shows the list of TCMs for the gravity assist with the guidance accuracy results.
- The Earth closest approach occurred at 10:08:07 UT, December 3, 2015 over the Pacific Ocean (Figure 112). The closest distance was 3090 km (from the Earth surface) and the flyby deflection angle (angle between incoming and outgoing velocity vector in ECI frame) is 83º. The interplanetary velocity increment by this EGA is 1.6 km/s. The spacecraft experienced an eclipse for 20 minutes, which is the longest battery-powered operation for Hayabusa-2 throughout its mission.
- The operation team is now preparing for operation practice/rehearsals using the hardware-in-the-loop simulator in the year 2017 to be ready for the asteroid arrival in the summer 2018.
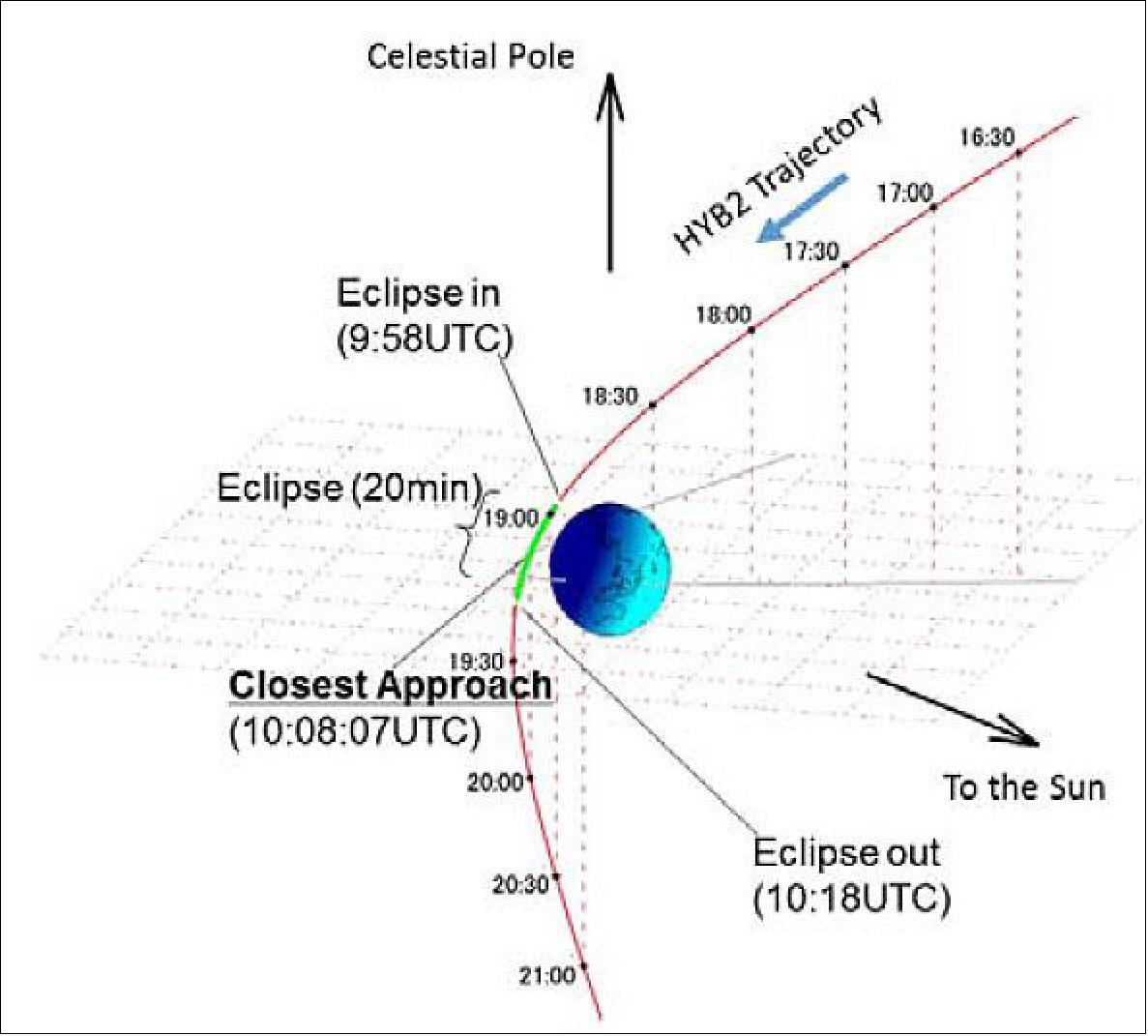
• July 14, 2016: MASCOT (Mobile Asteroid Surface Scout) of DLR has been travelling on board the Japanese Hayabusa-2 spacecraft for the last 1.5 years, and is currently at approximately 65 million km from Earth. On 14 July 2016, DLR (German Aerospace Center) engineers in the LCC (Lander Control Center) in Cologne switched the shoebox-sized lander and its four German and French-built instruments back on, and will spend the next few days finding answers to two questions: How is MASCOT's state of health? And how are the experiments on board? "We do a check-up once a year to find out whether all system components and instruments are still in good working order," explains Christian Krause from the Lander Control Center team at DLR. 90)
- The Hayabusa-2 spacecraft by JAXA (Japan Aerospace Exploration Agency) set off on its mission on 3 December 2014, carrying the French-German MASCOT lander. One year later, the duo zipped round the Earth to gain momentum and sent back photos from our planet before continuing on toward the asteroid Ryugu. The spacecraft will venture deeper into space until the summer of 2018, when it will enter orbit around the celestial body that DLR planetary researcher Ralf Jaumann refers to as a 'beautifully primitive object'. "During this mission, we will be investigating primordial material from the solar nebula; it has remained practically unchanged in its 4.5 billion years of existence." Then, while the Hayabusa-2 spacecraft measures and analyses the asteroid from its position in orbit, MASCOT will descend to its surface to conduct scientific measurements. The Japanese spacecraft will also take on soil samples that it will bring back to Earth in 2020. "This is a complete package. There has never been anything like this before: we will be observing and mapping remotely, measuring the asteroid, analyzing its surface and bringing the samples back to Earth." But this complete package requires the concerted efforts of engineers and scientists from Germany, France and Japan who have joined forces in an international cooperation.
• December 25, 2015: Before and after the Earth swing-by, the laser altimeter (LIDAR) on Hayabusa-2 attempted to receive laser light from the SLR (Satellite Laser Ranging) ground stations. 91)
- After the swing-by, the Mt. Stromlo station at SERC (Space Environment Research Center Australia) in the suburbs of Canberra, Australia, transmitted laser light towards Hayabusa-2. The spacecraft successfully received the beam using the onboard LIDAR that can send and receive laser signals to accurately establish the range of objects from the spacecraft. At the time of the transmission from Mt. Stomlo, Hayabusa-2 was 6,700,000 km from Earth. This success established the one-way 'up link' of the optical connection.
• December 14, 2015: JAXA confirmed that the Asteroid Explorer “Hayabusa-2” is cruising on its target orbit after measuring and calculating the post-Earth-swing-by orbit. With the swing-by results, the explorer’s orbit turned by about 80 degrees and its speed increased by about 1.6 km/s to about 31.9 km/s (against the sun), thus the orbit achieved the required target velocity (Figure 113). According to the operational support provided by the NASA DSN (Deep Space Network) stations and the ESA (European Space Agency) deep space ground station Malargüe in Australia, the Hayabusa-2 is in good health. 92) 93)
- At 9:00 UTC on Dec. 14, 2015, the Hayabusa-2 is at a distance of ~4.15 million km from Earth, and about 144.85 million km from the sun. Its cruising speed is 32.31 km/s (against the sun). Hayabusa-2 is increasing its speed under the influence of the sun’s gravity after the swing-by.
- After the swing-by, Hayabusa-2 took images of the Earth using its onboard ONC-T (Optical Navigation Camera - Telescopic). The ONC-T can shoot color images using seven filters. The image of Figure 114 is composed by using three of these filters. One can see the Australian continent and Antarctica in the image. The South Pole is not lit by the sun during the(northern hemisphere) summer, and the meteorological satellites also do not cover the Antarctic continent to take their imagery, hence the shot this time is precious.
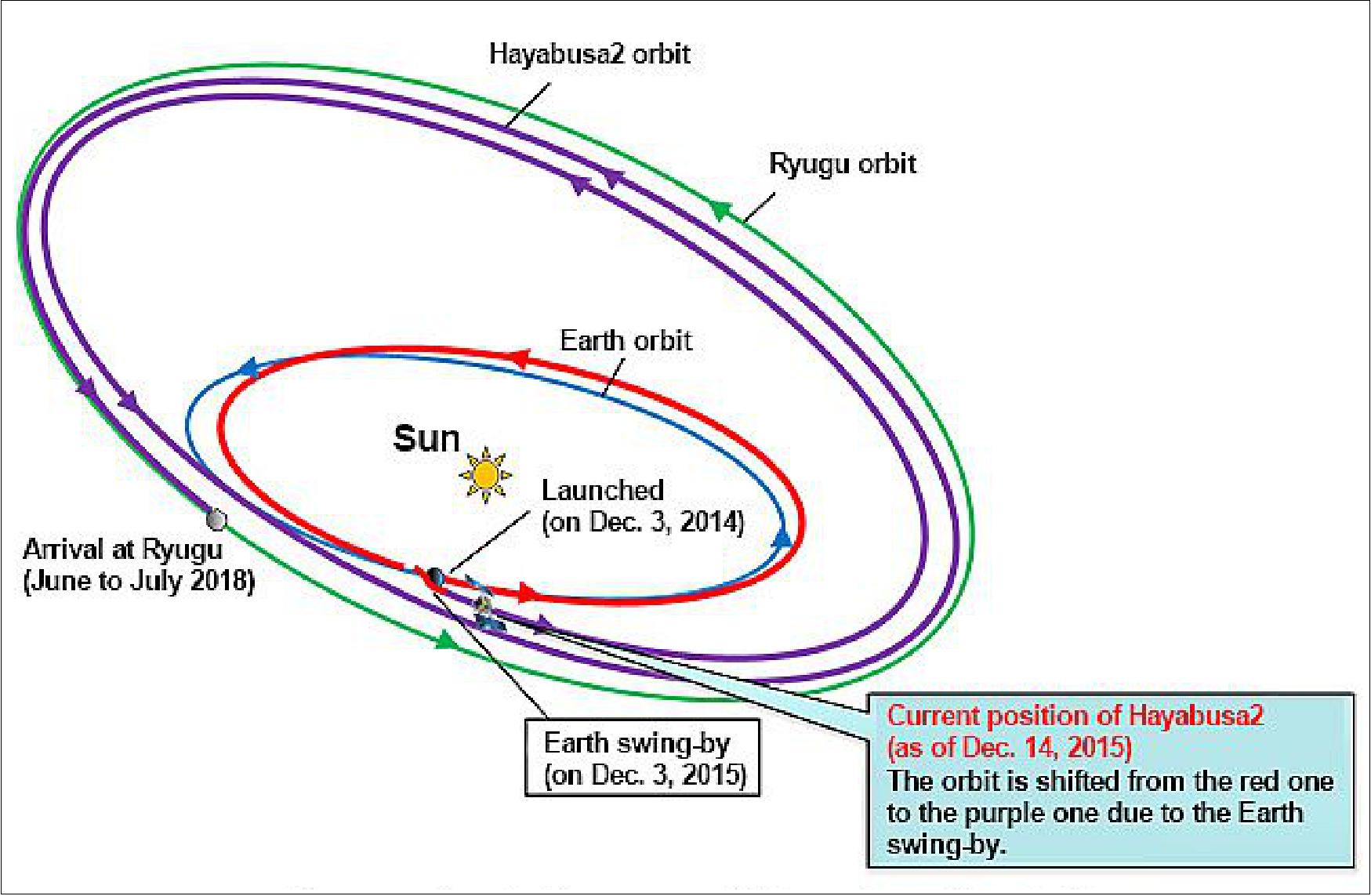
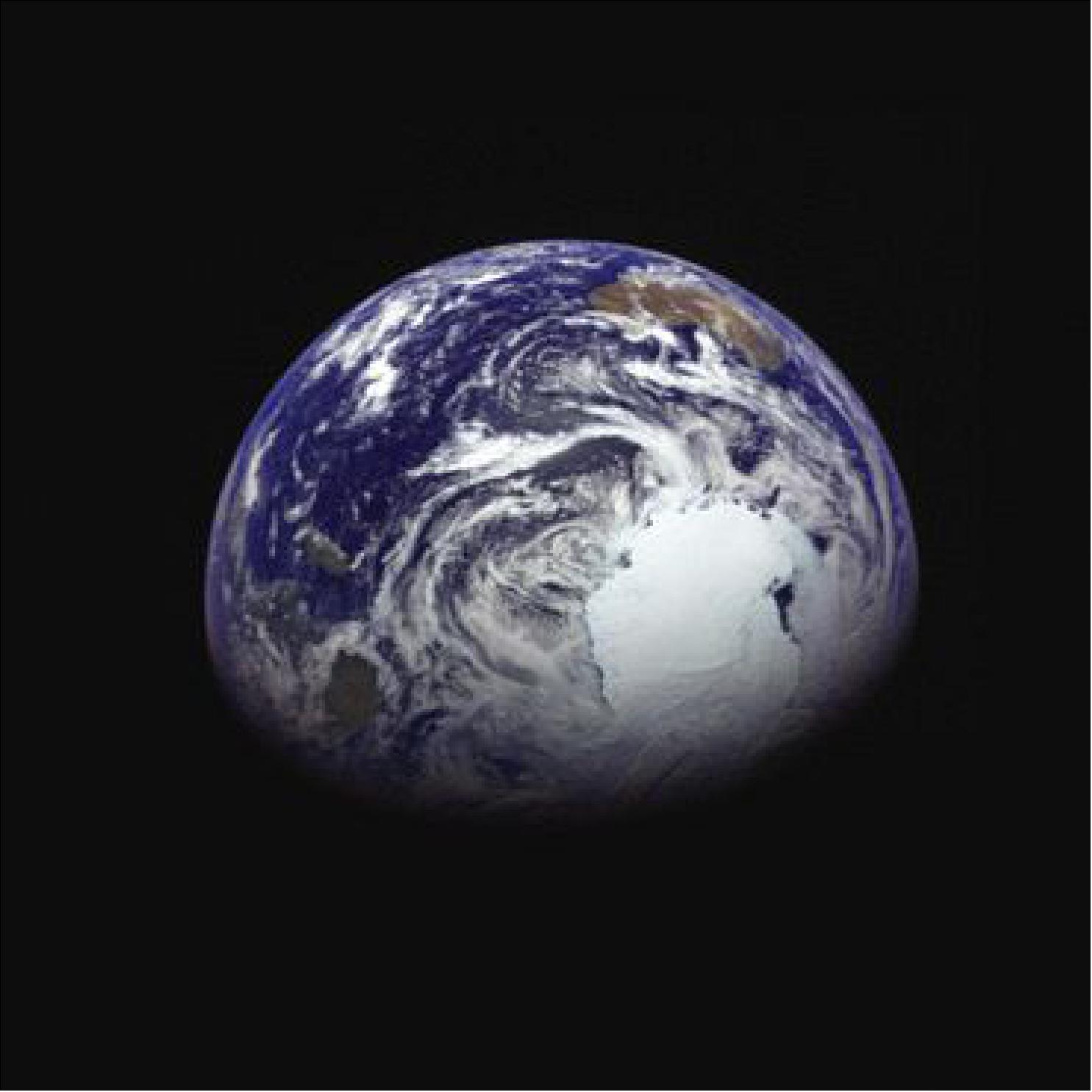
• December 3, 2015: JAXA performed an Earth swing-by operation of the Asteroid Explorer "Hayabusa-2 " in the evening of December 3 (Thursday), 2015 JST (Japan Standard Time). The Hayabusa-2 flew closest to the Earth at 10:08 (UTC) and passed over Hawaii at an altitude of about 3,090 km. - The Hayabusa-2 project team is currently measuring and calculating the post-swing-by orbit. It will take about a week to confirm if the explorer entered the target orbit. We will report the result once it is determined. The Hayabusa-2 is in good health. 94)
- ESA's deep-space Malargüe ground station in Australia lent a helping ear as Japan’s Hayabusa-2 asteroid mission visited Earth on Thursday. 95)
• October 5, 2015: The asteroid 1999 JU3, a target of the Asteroid Explorer “Hayabusa-2,” was named “Ryugu”. 96)
- JAXA conducted a naming proposal campaign between July 22 and August 31, 2015.
- Selection reasons: In the Japanese ancient story “Urashima Taro”, the main character, Taro Urashima, brought back a casket from the Dragon’s palace, or the “Ryugu” Castle, at the bottom of ocean. The Hayabusa-2 will also bring back a capsule with samples, thus the theme of “bringing back a treasure” is common.
- Rocks containing water are expected to exist on asteroid 1999 JU3. The name “Ryugu” also reminds us of water, as “Ryugu Castle” is under the ocean. The name is not similar or identical with any other already existing names of planets or asteroids, and there were many entries for this name among suggested names that are related to mythology.
- According to the naming rule stipulated by the International Asteroid Union (IAU), the name “is preferably from mythology” and the “Ryugu” fits that rule. Also, there is little concern of infringing the Trademark Law or any other third party trademarks.
• June 8, 2015: The Hayabusa-2 spacecraft has been continuously operating its ion engine for the second time since June 2, and successfully completed its operations at 0:25 a.m. on June 7 (Japan Standard Time.) The second continuous operation lasted for 102 hours as scheduled. 97)
- The ion engine boost was needed in preparation for the Earth swing-by planned in December 2015, and the total hours of the first and second operations (409 hours and 102 hours respectively) reached 511 hours.
• April 29, 2015: ESA is set to support Japan’s ‘touch-and-go’ Hayabusa-2 spacecraft, now en route to a little-known asteroid, helping to boost the scientific return from this audacious mission. A flawless launch last December marked the start of a six-year round-trip for Japan’s Hayabusa-2, which is on course to arrive at the carbon-rich asteroid 1999 JU3 in June 2018. 98)
- In the first such support provided to a Japanese deep-space mission, ESA’s 35 m diameter dish at Malargüe, Argentina, will provide up to 400 hours of tracking, establishing radio contact as the asteroid arcs through the Solar System between 135 million to 210 million km from the Sun. Telecommands from mission controllers at JAXA (Japan Aerospace and Exploration Agency) will be fed to the station via ESA/ESOC in Darmstadt, Germany.
- ESA is using its ESTRACK network with deep space stations at Malargüe (Argentina), Cebreros (Spain) and New Norcia (Australia). On 22 April, ESA completed a live, inflight compatibility test, linking the Malargüe station with the Japanese spacecraft, demonstrating the network's readiness to provide tracking for the Hayabusa-2 mission.
• April 10, 2015: Hayabusa-2 is stably flying in space. The new fiscal year has just started in Japan, and JAXA is taking a new step as we became a 'National Research and Development Agency' from the previous independent administrative agency. The Hayabusa-2 project is also taking a fresh step with a new team, including handing the baton over to a new project manager, namely from Hitoshi Kuninaka to Yuichi Tsuda. All members of the project are engaged in the mission with a fresh mindset. 99)
• March 18, 2015: LIDAR (LIght Detection And Ranging) is one of the satellite buses onboard Hayabusa-2. Basically LIDAR is used to measure the distance between the satellite and the target asteroid, 1999JU3. The distance is important information to control the satellite in descending operation such as close-up observation from low altitude and separation of rover, lander, and small carry on impactor. Especially an accurate measurement of the distance is required during touch-down and sampling operations. Thus, the LIDAR onboard Hayabusa-2 is required to measure about 4 orders of magnitude variety of distance, from 30m to 25km. To satisfy this requirement, the LIDAR has two types of receiver optics, one is for near range (nearer than 1km) and another is for far range (farther than 1km). 100) 101)
- The distance from the target asteroid, 1999JU3, is one of the fundamental information for operational and scientific observations. For example, the gravitational acceleration is calculated from the change rate of the distance from the target asteroid during free fall operation. Construction of a shape model requires a characteristic length scale in camera image. And also, the measurement of the absolute reflectance from camera image and/or spectrometer data requires an absolute distance from the target.
- The dust count mode is one of the operational modes of the LIDAR in which the LIDAR detects faint scattered light from dust grains on the line of sight. The distribution of dust grains along the line of sight is estimated from the profile of received light and the effective reflectance of dust cloud. Its function was tested both electrically and optically, and it seemed working properly.
• March 5, 2015: Hayabusa-2, launched on Dec. 3, 2014, completed its initial functional confirmation period of about three months. The explorer was moving to the cruising phase on March 3 while heading to the asteroid 1999 JU3. 102)
- The Hayabusa-2 is in good health. It will be under preparatory operation including speed increase by continuous operation of the ion engines for an Earth swing-by scheduled in Nov. or Dec., 2015.
- The project plans to increase the cruising speed of the explorer (60 m/s) by operating two ion engines twice (in total about 600 hours or 25 days) until the Earth swing-by. For the first operation, the project will gradually increase the time duration of continuous ion-engine operation from March 3 onwards, and will operate the engines for about 400 hours within March. The second operation is scheduled in early June.
• Feb. 3, 2015: Hayabusa-2 is now undergoing the initial functional confirmation. Basic operations and performance of onboard instruments and ground systems have been tested one by one as of the end of January. Some examples: 103) 104)
- Ion engine test operation (one unit at a time). Four ion engines were being operated one by one. A thrust of 7-10 mN was generated on the orbit for the first time.
- Establishing communication by Ka-band communication equipment (between Jan. 5 to 10, 2015). Communication was successful between the Hayabusa-2 and NASA DSN stations to establish deep-space Ka-band communication for the first time for a Japanese space explorer. Ka-band communication will be used to send observation data during the mission for the Hayabusa-2 to stay near the asteroid.
- Ion engine can autonomously operate for 24 hours. Long duration of autonomous operation with two or three ion engines was tested, and 24-hour continuous operation was attained. The maximum thrust was confirmed to be about 28 mN, which is the expected value.
• Dec. 5, 2014: JAXA) confirmed the completion of a sequence of the important operations for the Asteroid Exploration Hayabusa-2 mission including the deployment of the horn part of the sampler that captures samples from the asteroid’s surface, the release of the locks for the launch that ratchet the gimbal that controls the direction of the ion engine, and functional verification of the three-axis stabilization controls and the ground precision orbit determination system. With this confirmation, the critical operation phase of the Hayabusa-2 was completed. 105)
• JAXA received the first signals of Hayabusa-2 on December 3, 2014 at 6.44 UTC on Dec. 3, 2014, acquired by the NASA DSN (Deep Space Network) at Goldstone in California; it was confirmed that its initial sequence of operations including the solar array paddle deployment and sun acquisition control have been performed normally. - The explorer is now in a stable condition. 106)
Sensor Complement
SMP (Sampler Horn)
The SMP, also referred to as “sampler mechanism”, will collect samples from the surface of the asteroid. The basic design is the same of that aboard the Hayabusa mission; thus, the same mechanism will be used, which is a small projectile to be shot as soon as the tip of a cylinder-shaped horn touches the asteroid surface, then materials ejected from the surface will be collected in a catcher (storage).
Major improvements from the Hayabusa:
• The seal performance has been improved for Hayabusa-2, and a newly developed metal seal method is applied, so that volatile gas such as rare gas can be brought back thanks to high airtightness.
• The number of compartments for the catcher that will store captured materials is increased by one to three compartments compared to two for the Hayabusa.
• For the Hayabusa-2, the edge of the sampler horn was folded back inward as you can see in the left figure so that sand gravel can be hung on the cuff (gravel of 1 to 5 mm can be captured.) If the explorer makes an emergency stop during its ascending, gravel will keep going up to be stored in the catcher. This mechanism is a backup for sample retaining. 107)
SCI (Small Carry-on Impactor)
SCI is a new payload, an impactor caller “Liner”, which is featured on Hayabusa-2. It consists of a small box, about 30 cm in size, which will be released a few hundred meters above the surface of the asteroid. The 2 kg copper liner will be shot at high speed (2 km/s) into the surface of the asteroid to create a small artificial crater by collision. The size of the crater may be about 2 or 3 m in diameter. The purpose of this impact experiment is not only to study the physical characteristics of the asteroid surface, but also to reveal the subsurface material, of which Hayabusa-2 will try to recover samples. It is expected that the fresh crater samples are less weathered by the space environment or heat. — The impactor (Liner) is made of pure copper to be able to easily identify the sample from other materials on the asteroid.
NIRS3 (Near InfraRed Spectrometer 3µm) and TIR (Thermal Infrared Imager)
The Hayabusa-2 will be orbiting asteroid 1999JU3 at an altitude of ~20 km, and observe the asteroid by remote sensing. Two kinds of infrared observations will play an important role in this remote sensing.
• One is the near infrared spectrometer “NIRS3” to investigate mineral and water metamorphism or reciprocal chemical action of minerals and water by spectroscopic observations with near infrared rays.
• The other is the TIR (Thermal Infrared Imager) to study the temperature and thermal inertia of the asteroid, by capturing images of thermal radiation from the asteroid. In other words, it will find particles of the soil and the porosity of the mass of rock that influence the temperature.
TIR (Thermal Infrared Imager) is a two-dimensional thermal infrared imager on Hayabusa-2 to explore C-type near-earth asteroid 162173 Ryugu. During the cruise phase, TIR observed the deep sky with setting the instrument at various temperatures, and also observed the Earth and the Moon before and after the Earth swing-by. Asteroid proximity phase operations are planned for TIR. 108)
TIR performances: TIR is basically the same as the LIR on Akatsuki Venus climate orbiter, based on a two-dimensional uncooled micro-bolometer array with 328 x 248 effective pixels, and covers 8 to 12 am range. TIR has been proven during the pre-flight tests and in-flight operations to confirm the temperature range from 150 to 460 K. This implies that not only the sunlit areas of Ryugu but even the nighttime areas could be observed if the thermal inertia is larger than 50 tiu. The FOV (Field of View) of TIR covers 16.7° x 12.7° in horizontal and vertical directions with IFOV is 0.051° per pixel. This corresponds to ca. 17 m per pixel from the Home Position (20 km altitude from asteroid) and to ca. 85 cm per pixel from 1 km altitude. Closest views of asteroid surface by TIR will be ca. 1 cm per pixel from 10 m altitude just before the final free fall to the surface for touchdown.
MINERVA-II (Rover Payload)
There are three small MINERVA-II rovers in total. They are of the heritage of MINERVA of Hayabusa, and they move on the surface of the asteroid by hopping. Hayabusa had only one MINERVA rover which failed to land it on the surface of Itokawa. Hayabusa-2 has two kinds of rovers, MINERVA-II-1 which separates into two (A and B), and MINERVA-II-2, so there are three small rovers in total. The rovers have small sensors (cameras, thermometers) onboard to convey their information to the orbiting Hayabusa-2 spacecraft.
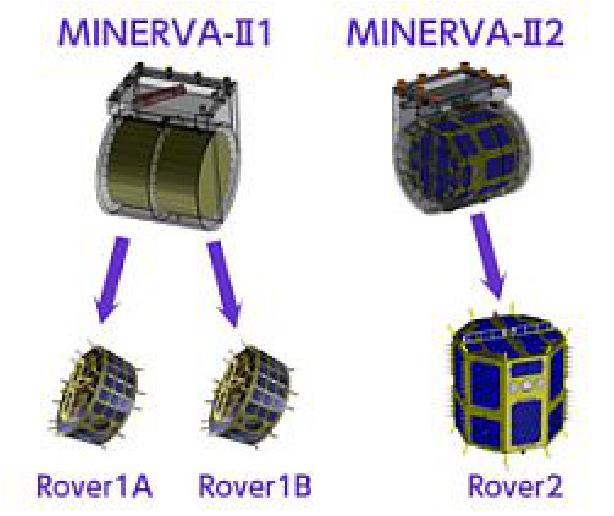
All the rovers have hopping mobile systems to explore over the surface after the deployment from the mother spacecraft at the vicinity of the target asteroid. 109)
Size | 17 cm diameter; 7 cm in height |
Mass | 1.15 kg (Rover-1A); 1.129 kg (Rover-1B) |
OBC (On-Board Computer) | SH2 |
Actuator | DC motor x 1 |
Mobile system | Hopping |
Power supply | Solar cells generating 2 W @1.4 AU from Sun; Capacitors:100 F, 2.5 V x 3 |
Communication | 32 kbit/s (max) telemetry link |
Sensors for navigation | Photo diodes, thermometers, gyro, accelerometer |
Sensors for observation | Camera x 4 (Rover-1A); Cameras x 3 (Rover-1B), thermometers, potentiometers |
DCAM3 (Deployable Camera)
DCAM3 is a miniaturized optical camera with the objective to observe the artificial impact of SCI ( Small Carry-on Impactor) on the asteroid. DCAM3 takes images of the spreading ejecta motion on the asteroid, which provides information of surface physical properties and ejecta behavior under microgravity. 110)
Collisions between primitive planetary bodies are one of the most important physical processes in the planetary accretion from planetesimals to planets. DCAM3 is a detachable camera inherited from DCAM-1,2 of the Japanese IKAROS mission. A separable instrument is necessary to obtain close up views of the impact, because the mother ship (Hayabusa-2) will be hiding in a safe region far from the impact point to avoid a risk that the mother ship encounters high-speed ejecta from the asteroid during the impact operation.
The impact observation part in the DCAM3 system consist of a separable small camera cylinder, its detachment instrument, and receiving antennas on the mother ship (Figure 120). After separation in the SCI impact operation, DCAM3 starts its observation at visible wavelength and sends image data on one-way communication to the mother ship. The design of DCAM3 is similar to IKAROS DCAM1,2 (Figure 121), but has an additional high-resolution camera in the body.
The DCAM3 instrumentation is provided by a Japanese University Consortium in cooperation with JAXA. The University Consortium consists of: University of Tokyo, Kashiwa; Kobe University, Kobe; JAXA (Japan Aerospace Exploration Agency), Sagamihara; Planetary Exploration Research Center, Chiba Institute of Technology, Narashino; Kochi University, Kochi; The Graduate University for Advanced Studies, Sagamihara; and the University of Occupational and Environmental Health, Kitakyusyu.
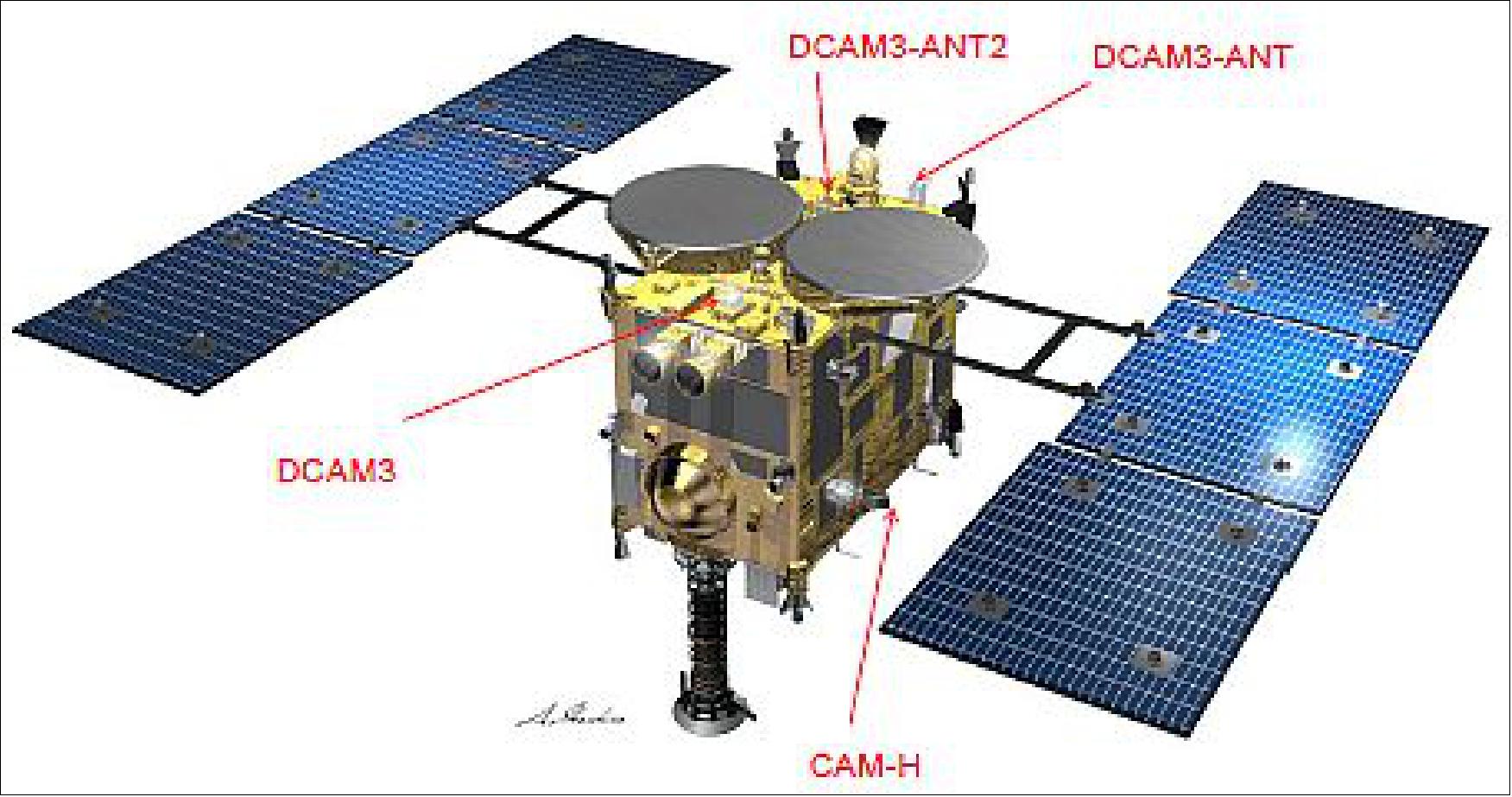

The scientific observations are performed by DCAM3-D, a wide-angle high-resolution camera and its fast digital transmission component in the DCAM3 body. The scientific objectives of this camera are summarized as (1) clarifying the subsurface structure, and (2) constructing the impact scaling rule applicable to the surface of asteroid 1999JU3. The observation objects of the camera are ejecta and a subsequent crater of the SCI impact, and a relative position of the SCI to the asteroid when it is launched. DCAM3-D can determine the size and the angle of the ejecta curtain, and the speed of the ejecta spreading or fragment spattering, which are the key information for the above objectives. In addition, low-speed ejecta (dust) spreading will possibly be observed around the DCAM3 in a few hours after the impact.
The DCAM3-D CMOS detector produces 2000 x 2000 pixels 8 bit monochromatic images with a 74º x 74º wide-angle optics. It takes 1 frame/s sequential images at maximum. Figure 122 shows a virtual image of spreading ejecta on asteroid 1999JU3 taken by the DCAM3-D in an ideal position. The optical camera has enough-high space resolution and bright resolution for its sciences. DCAM3 continues to produce data for a few hours until the batteries run out or the DCAM3 falls and crashes on the asteroid. The digital communication device can send the image data to the mother ship with 4 Mbit/s at maximum. Instruments in the mother ship store all data taken by the deployed camera. The total volume of image data is estimated to be approximately 5 Gbit after compression.
ONC-T (Optical Navigation Camera-Telescopic) Imager
The ONC-T was developed under collaboration between JAXA, the University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, The University of Aizu, the National Institute of Advanced Industrial Science and Technology (AIST).
The ONC system onboard the Hayabusa-2 spacecraft consists of one telescopic camera (T) and two wide-angle cameras (W1 and W2). ONC-T is a telescopic camera with seven band-pass filters in the visible and near-infrared range. These filters are placed on a wheel, which rotates to put a selected filter for different observations, enabling multiband imaging. 111)
The main objective of this instrument is to optically navigate the spacecraft to asteroid Ryugu (1999 JU3) and to conduct multi-band mapping the asteroid for choosing touchdown candidate sites and understanding the nature of this asteroid.
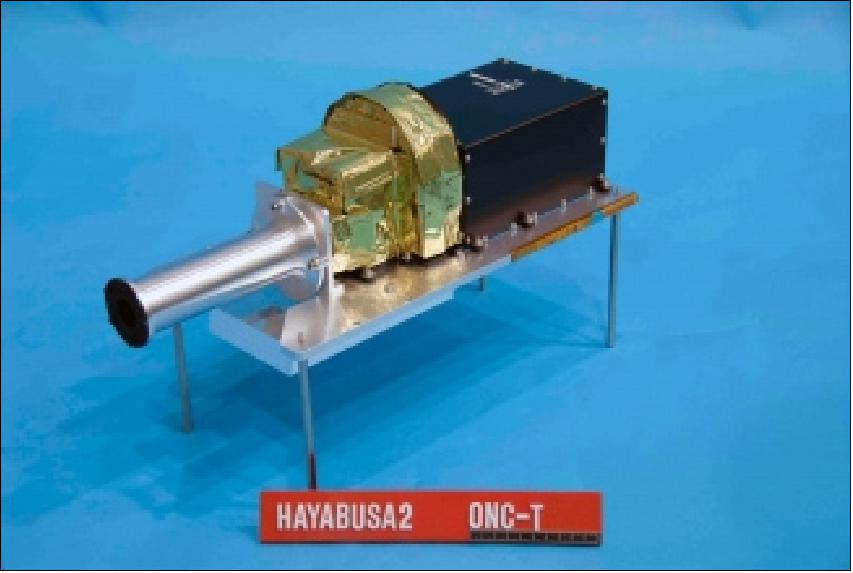
MASCOT (Mobile Asteroid Surface Scout)
MASCOT is a small lander provided by DLR (German Aerospace Center) in collaboration with CNES (French Space Agency). Building upon the successful joint development of the Philae lander of the Rosetta mission, DLR and CNES have studied this lander since 2008, and its realization was formally decided in early 2012. 112) 113) 114) 115)
After Hayabusa 2’s arrival to its target – asteroid 1999JU3 - in 2018, MASCOT will be dropped to the surface where it will perform in-situ investigations for about 15 hours. A hopping mechanism of MASCOT will enable measurements at several locations. The payload of MASCOT consists of four scientific instruments, a wide angle camera, an imaging IR spectrometer (MicrOmega), a radiometer (MARA) and a magnetometer. MASCOT will significantly enhance the overall scientific return of the Hayabusa-2 mission by providing context measurements to support the interpretation of analyses of the returned samples. 116)
MASCOT Spacecraft
The general concept of MASCOT is to provide a small landing system intended to be deployed from a main spacecraft (or “mother-ship”) on an asteroid sample return mission. MASCOT has been specifically designed to be compatible with JAXA Hayabusa-2 spacecraft and the environment given by the target asteroid 162173 Ryugu to fulfill the following scientific objectives: 117) 118)
- In-situ observations of undisturbed materials and microscopic scale observations, not possible from the main spacecraft, to determine the asteroid regolith structure, texture and composition
- Magnetic properties measured during the descent, during the hopping maneuvers and on the surface on more than one site
- Temperatures of one asteroid rotation and thermal properties on more than one site
- Help the selection of the sampling spot(s) by the main spacecraft.
MASCOT is a 11 kg lander with a 3 kg payload, of 0.3 x 0.3 x 0.2 m3 volume and a single energy source (of 220 Wh) allowing about a 12 hours of mission duration. The design for MASCOT is based on the following subsystems:

• Structure & Accommodation: The lander baseline design features a highly integrated carbon-fiber composite structure with a middle wall as main load bearing element. A common electronics box, called E-box, houses all the electronics. The lander is connected with the main spacecraft Hayabusa-2 via MESS (Mechanical and Electronics Support Structure), which comprises the PRM (Preload Release Mechanism) and the separation device. An umbilical connector supplies the power during the cruise phase.
• Thermal Control: The thermal control concept is based mainly on passive means such as MLI (Multi-Layer Insulation) and color coatings. Thus, it relies also on a day-night-cycle on the asteroid’s surface to balance the heat-load build-up. This constraint drives the selection of the operating asteroid site for MASCOT. An exception to the passive concept are the heaters used for the thermal control of batteries and MicrOmega during the cruise and commissioning phase. The heater is controlled by Hayabusa-2.
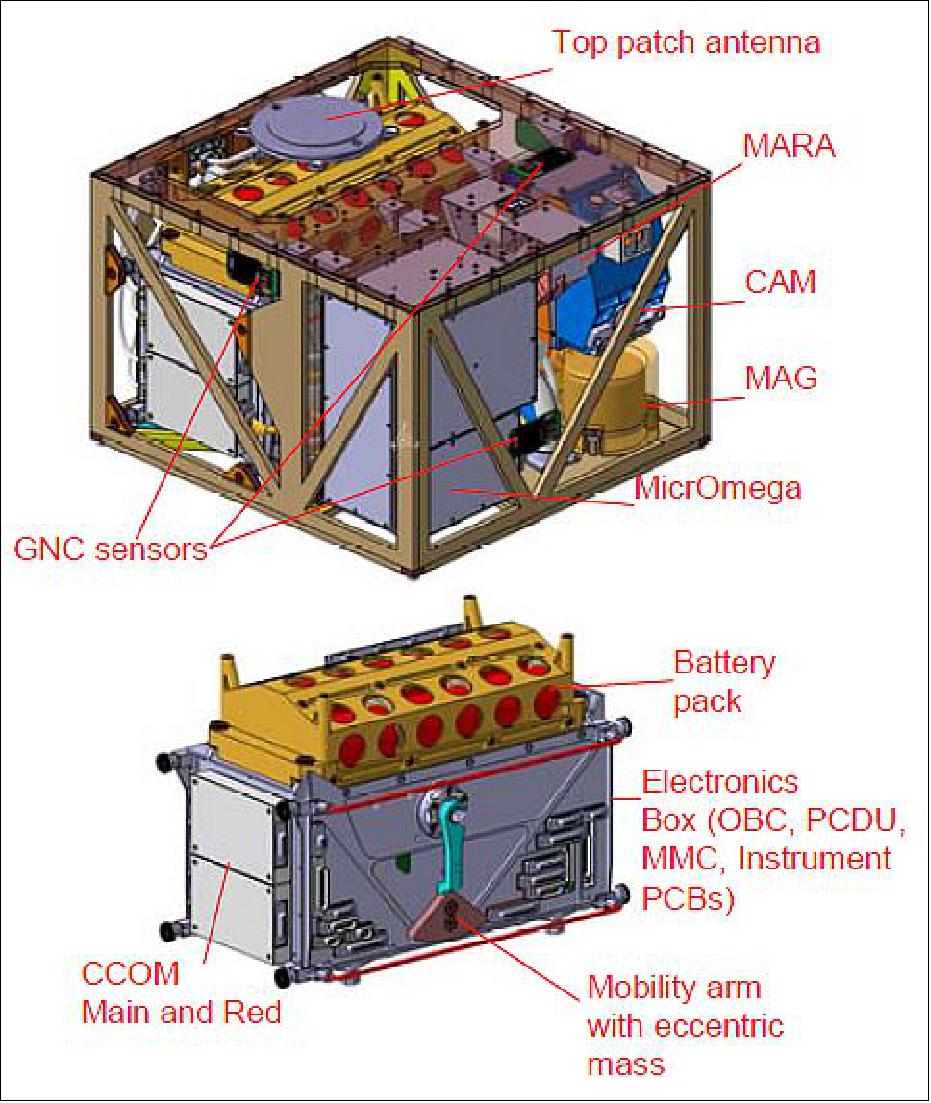
• Power: The power and energy supply is maintained by a primary battery, provided by the SAFT company (France), based on an earlier development for Philae. The unregulated bus voltage is converted into auxiliary voltages for MASCOT electronics by an internal PCDU (Power Control and Distribution Unit) located in the E-box. During the cruise and commissioning phase, the power will be supplied by the Hayabusa-2 spacecraft via a regulated power line. The power subsystem is a French contribution to MASCOT.
- During the cruise phase, the power is supplied by the Hayabusa-2 spacecraft via a dedicated power line, through the MESS connector. After separation, the power is supplied by a primary battery. Its capacity is dimensioned for an operating time of two asteroid days, ~16 hours nominal. Both the Hayabusa-2 power and the battery power line is converted into auxiliary voltages for MASCOT electronics by an internal PCDU (Power Control and Distribution Unit), located in the common E-box. The PCDU is made of two similar units forming a redundant architecture, with redundant power converters for the secondary voltages to redundant and non-redundant equipment. The data link with the OBC is via two UART RS422 lines for each PCDU unit.
• GNC (Guidance and Navigation) sensors: The GNC sensors are used to determine the MASCOT motion state and orientation on the asteroid’s surface. They are distributed all over the MASCOT body and are acquired via the hot redundant A/D converter of the OBC. The algorithms to determine the motion status, the illumination status and the MASCOT side in contact with the soil (side2soil) are implemented in the MASCOT OBSW. The navigation sensors consist of:
- OPS (Optical Position Sensors): 5 optical distance sensors are mounted on the outer skin of MASCOT on each side, except -Z, the nominal side at surface contact. The optical position sensors use an IR LED and a photodiode. The IR LED is switched on/off by the OBC to perform a differential measurement and detect the presence of a surface. With these sensors it is also possible to detect if MASCOT is moving or is lying still, the side on which MASCOT is lying and the distance to the soil.
- PECs (Photo-Electric Cells): These sensors are used for redundancy to the OPS. One PEC is mounted on each side of MASCOT. There are a total of 6 sensors. The output of the PEC is a voltage proportional to the cosine of angle between the sun vector and the cells normal vector.
- Separation sensor: Break-wire contacts on the power connector from Hayabusa-2, integrated in the MESS, will detect the separation.
• OBC (On-Board Computer): The MASCOT OBC is a dual redundant computer composed by 2 CPU boards (CPU-M, CPU-R) to execute the OBSW (On-Board Software) and 2 I/O boards (IOM-M, IOM-R) to provide interfaces with all MASCOT subsystems. The 4 PCBs are accommodated in the common E-box. The two CPU boards work in cold redundancy, while the I/O boards work in warm redundancy, cross-strapped with the CPU boards via SpaceWire links. Each I/O board uses a radiation tolerant FPGA to implement:
- the I/O controllers for the external UART serial interfaces
- the I/O controllers to handle the analog section and bi-level I/O interfaces
- a NAND Flash controller featuring a page level Reed - Solomon encoder / decoder
- the CPU switch-over logic driving the reconfiguration of the CPU from main to redundant or vice versa
- a local timer to centrally maintain the MOBT (MASCOT On-Board Time) independent from the CPU
- a small RAM area, EDAC protected, used as Safe Guard Memory (SGM) to propagate the OBSW context in case of CPU reset or switch-over.
These devices are accessible by the two CPU board via SpaceWire interface. The I/O board also contains the NAND Flash mass memory device, the analog section circuits, the RS422 transceivers, the SpaceWire LVDS transceivers and other interface drivers/receivers needed for the external interfaces. The CPU board uses an Aeroflex GR712RC SOC (System On a Chip) clocked at 40 MHz, embedding a dual LEON3FT CPU core and a few other cores, like SpaceWire controllers, timers, DSU (Debug Support Unit) etc. The board also accommodates the program and data RAM (implemented as a SRAM multi chip module), a reprogrammable non-volatile memory PROM (implemented as a MRAM device), the Watch Dog and Reset circuits and the SpaceWire LVDS and other transceivers needed for the external interfaces. The SOC DSU JTAG interface is routed to the E-box test connector through dedicated transceivers. The SpaceWire serial interfaces to the MicrOmega and CAM instruments are implemented by the CPU board.
In terms of processing and memory resources, each OBC section (1 CPU + 1 IOM) provides:
- CPU speed: minimum 40 DMIPS, 10 MFLOPS
- RAM (SRAM): 16 MByte EDAC protected
- PROM (MRAM): 256 kByte / 204 kByte with EDAC enabled
- NAND Flash: 1 GByte / 860 MByte with Reed-Solomon encoding.
• RF communications: The communication architecture is based on a redundant CCOM (Child -COM) transceiver provided by JAXA; it is identical with the communications subsystem of the MINERVA small landers. The data link is based on CCSDS TM/TC packets and the transmission protocol between the MASCOT CCOM and the Hayabusa-2 PCOM (Parent-COM) ensures one-to-one delivery of the CCSDS packets by automatic retransmission requests in both directions in case of errors. MASCOT is equipped with two CCOM units working in cold redundancy. Each CCOM unit has two RF ports connected to two patch antennas via an RF coupler. One antenna located on top (+Z) and the other on the bottom (-Z) of MASCOT ensure almost omnidirectional coverage.
The maximum bit rate possible is ~37.04 kbit/s for telemetry packet downlink; ~1.7 kbit/s for telecommand packet uplink. An UART RS422 TM/TC umbilical interface is foreseen through the E-box test connector, to be used as alternative to the CCOM RF channel only during ground AIV activities. After the Hayabusa-2 launch, only the CCOM RF channel is used for TM/TC with MASCOT, via the Hayabusa-2 data handling unit (DHU) and the lander’s computer,OME (On-board Minerva Equipment).
MASCOT antenna: For cruise phase operations, a dedicated MESS antenna is required whereas for on asteroid operations, the OME-A Hayabusa antenna is used. Two omnidirectional antennas are positioned on the top and bottom sides of MASCOT (Figure 126). The communication subsystem (CCOM transceiver excepted) is a French contribution to MASCOT.
Inside MASCOT a redundant set of JAXA-provided Child-Communication-transceivers (CCOM) is used to communicate with its counterpart - the Parent-Communication transceiver (PCOM) - on board of Hayabusa-2 based on a half-duplex communication and time division multiple access (TDMA) methods. The whole inter-spacecraft communication chain is shown in Figure 128.

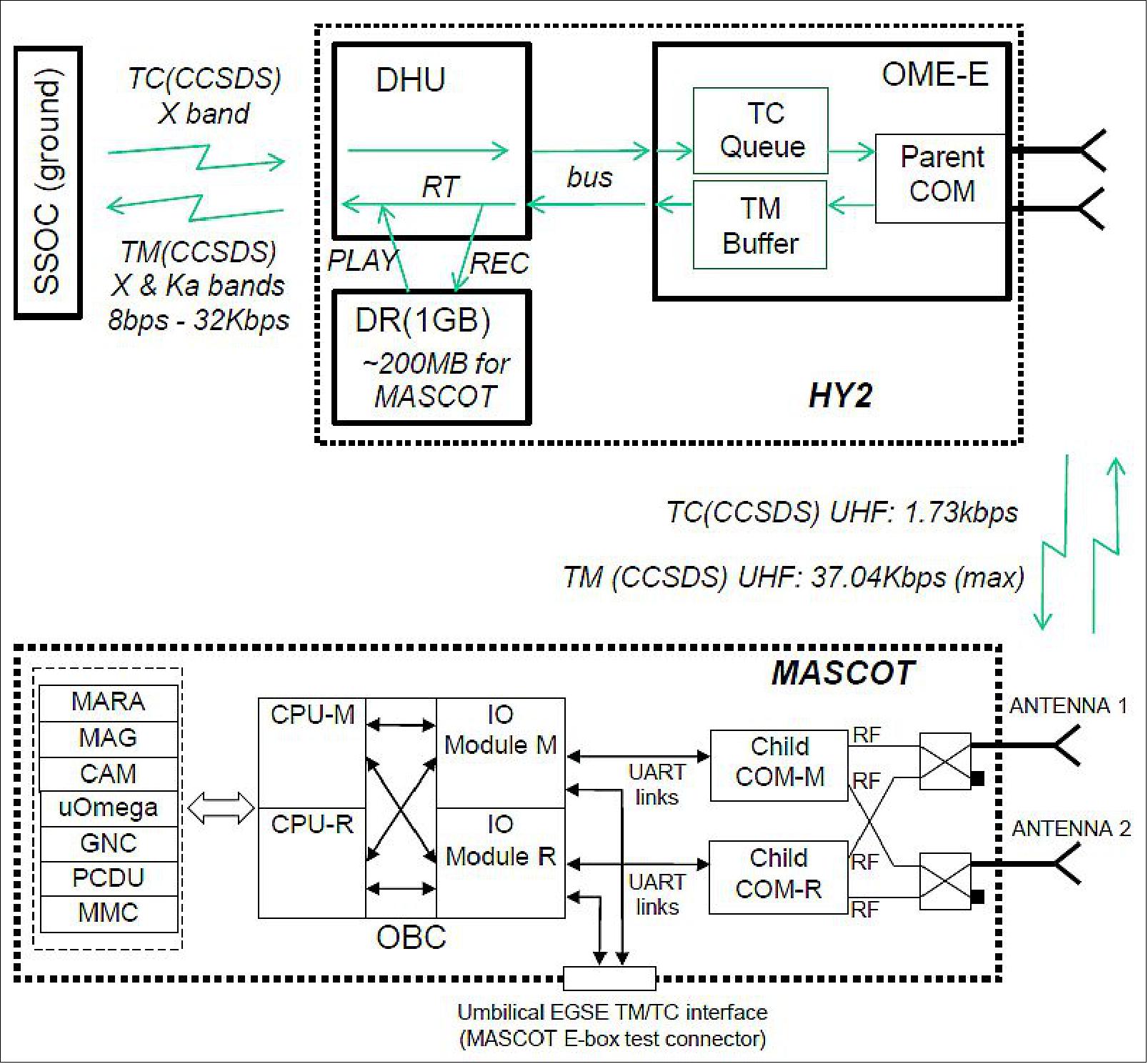
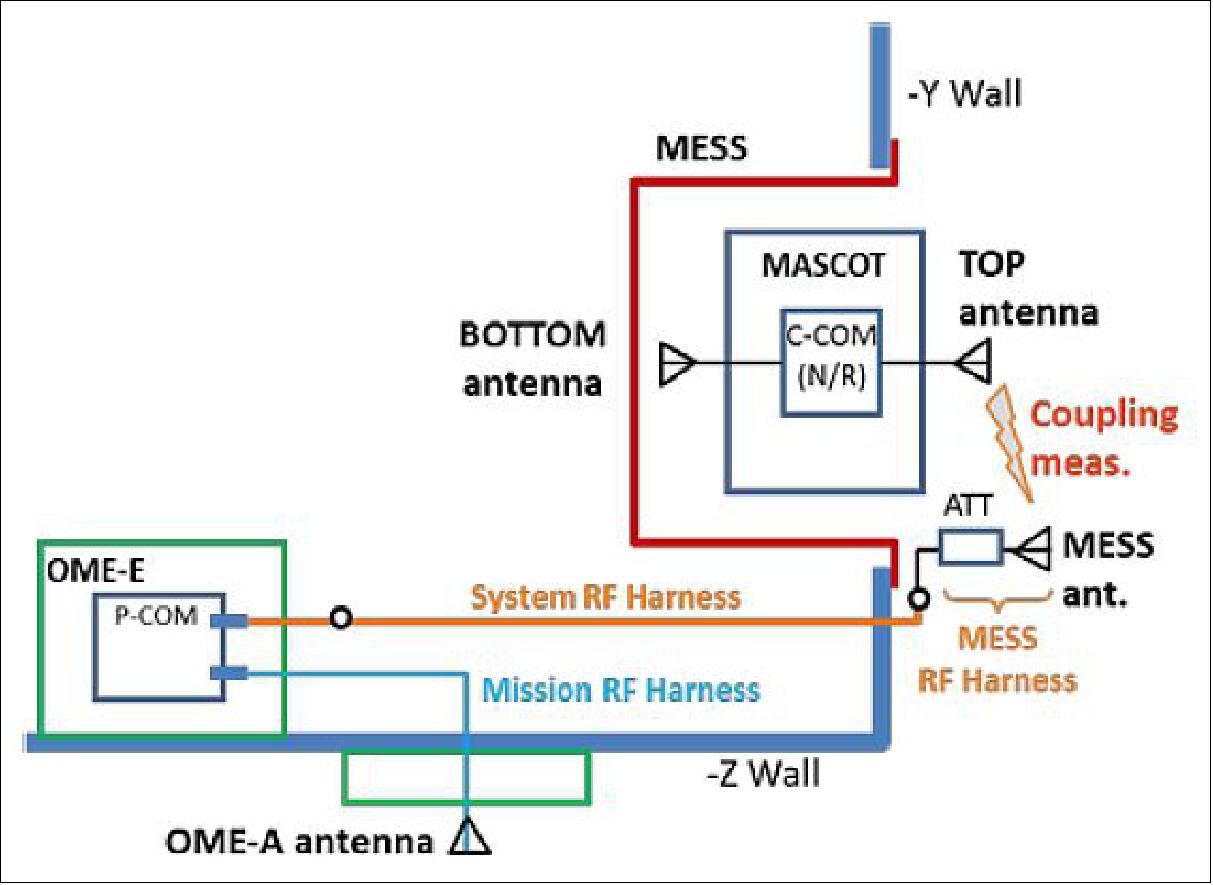
• MASCOT Mobility Mechanism: It fulfils two functions, namely up-righting MASCOT into the correct attitude after landing, and providing a hopping capability to relocate MASCOT onto a different site. The motion is generated by driving an off-centered mass to provide the adequate momentum. The mass is driven by an electric motor, which is controlled by a dedicated, dual, cold-redundant electronic unit called MMC (Mobility Mechanism Controller). Each MMC branch is connected to the OBC via a UART RS422 line.
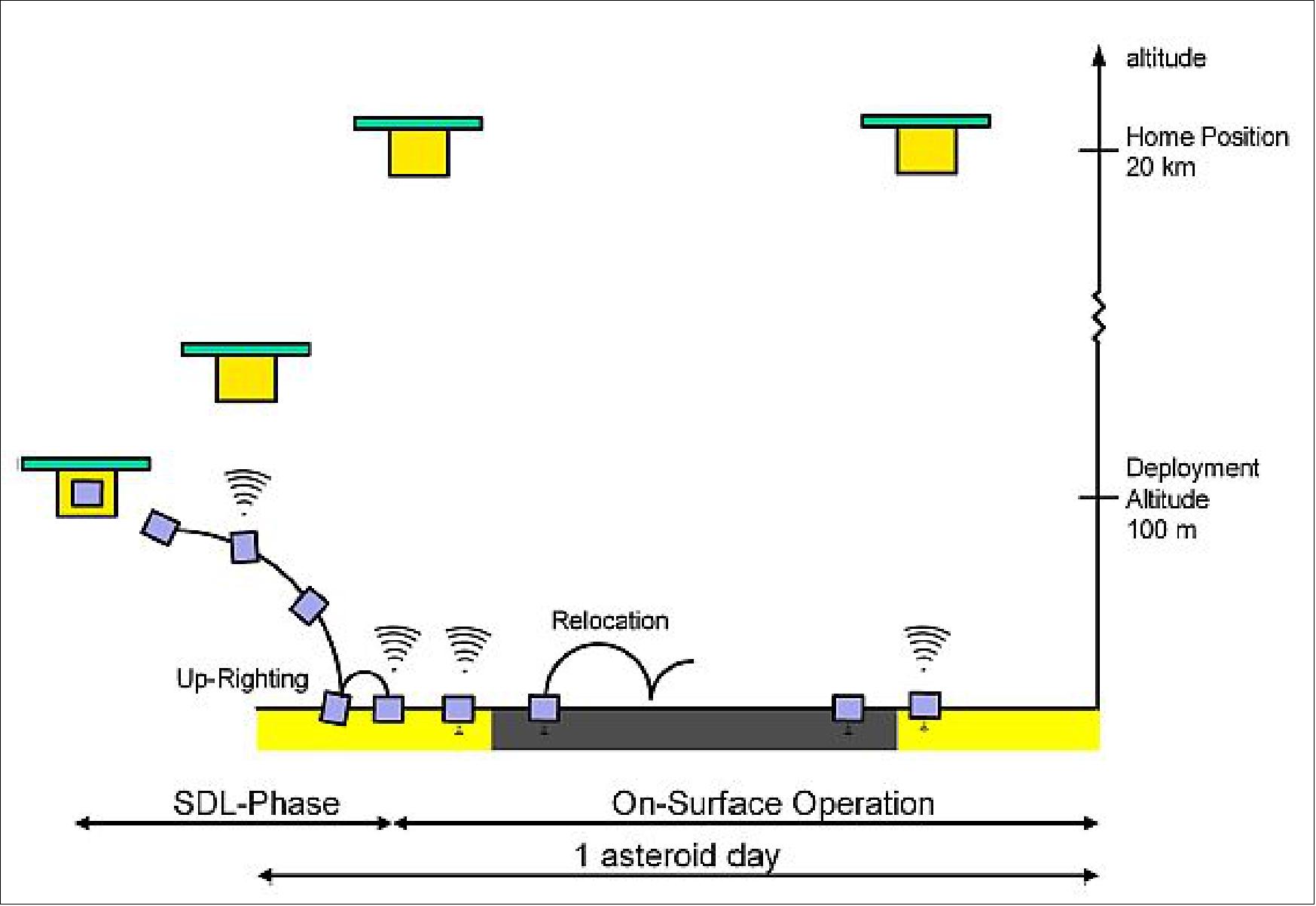
The OPS (Optical Position Sensors), designed and manufactured by Cosine Research B.V., Leiden, The Netherlands, is a small sensor (32:6 mm x 27 mm x 21:6 mm) with a mass of about 28 g. It consists of an infrared LED and an appropriate photodiode (Figure 130). The light omitted by the LED is reflected by any object in the FOV (Field of View) of the sensor. Nearer objects reflect more light and light from objects further away than 12 cm can not detected any more. This gives the opportunity to detect objects in proximity in a certain direction. In addition the LED is on/off modulated by the OBC and the signal from the photodiode is correlated with this modulation. With this method one can distinguish between reflected light from the LED and background illumination e.g. from sunlight. Figure 131 shows the output voltage of the OPS as function of the distance from the object.
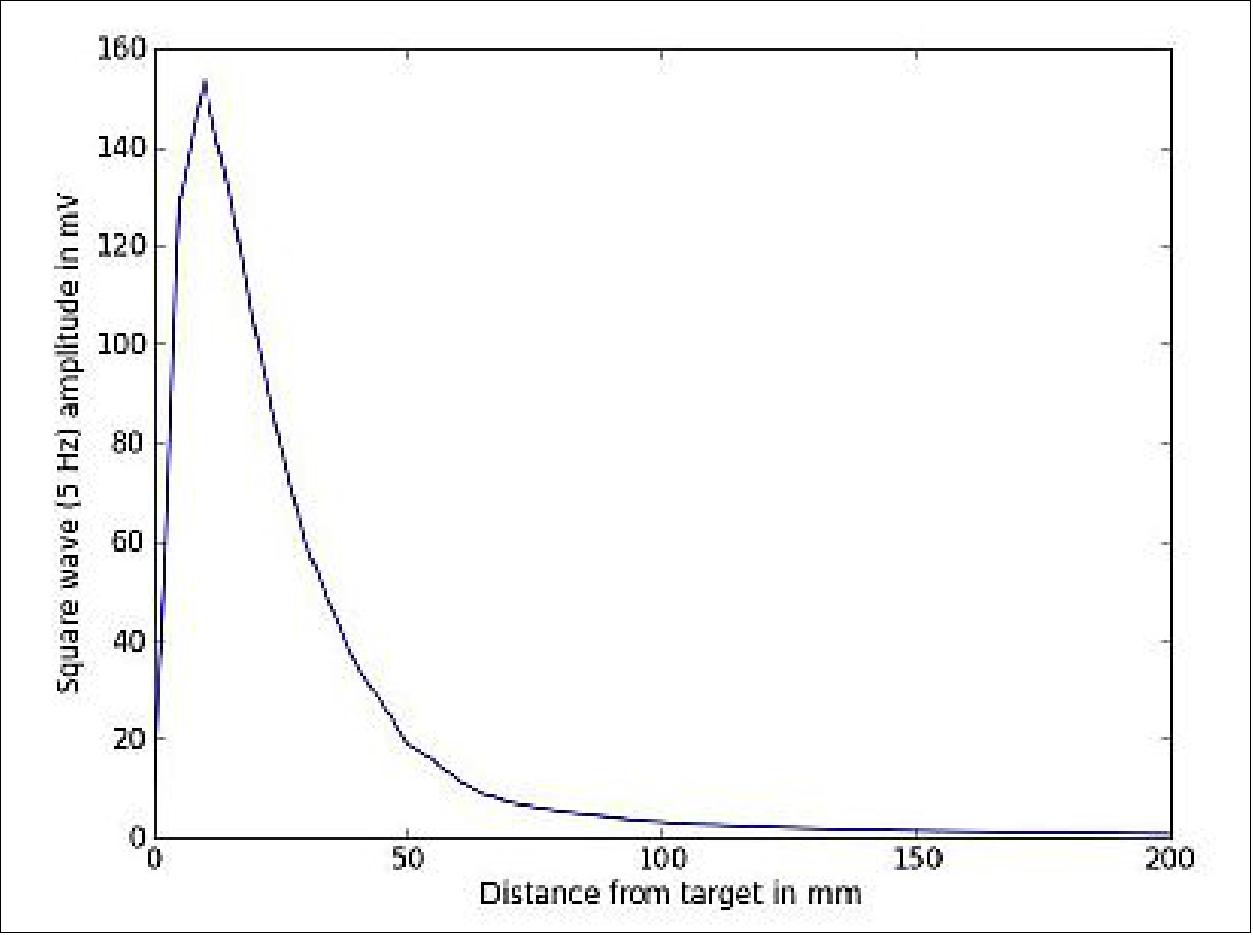
Five of these OPS systems are used on MASCOT, mounted on 5 different sides of the cuboid. Only the instrument side is not equipped with such a sensor. This space is needed for the scientific instruments. As one can see in Figure 131, the output voltage decreases again for distances smaller than 10 mm. To prevent such small distances, the sensors are not mounted flat to the surface but shifted inside the body of MASCOT.

MASCOT Sensor Complement
The payload consists of a suite of instruments which fit into the payload compartment of the structure (Figure 133). Each instrument has its own electronic unit, which provides the signal conditioning to the instrument sensors/detectors and, where present, to the actuators, converts the acquired measurements into digital format and transmits them to the OBC via dedicated serial lines. The OBC is in charge of configuring the instruments, driving their acquisition sequence and performing data processing realizing instrument specific data acquisition modes. The instruments are not designed to be fault tolerant, except for the data lines, which are connected to both OBC main and redundant sections.
As an in situ Science Landing Package, MASCOT will augment the science capabilities of the Hayabusa-2 mission on three levels:
1) ‘Context Science’ – By coordinated and complementary observations of the instruments on board MASCOT, on the main spacecraft and in combination with the lab analysis of the returned samples, MASCOT will ensure ground truth, down to the microscopic scale, for the acquired scientific results of the other mission elements. The goal is to obtain a cross-scale link with respect to surface and subsurface science , combining all three data sets to obtain a profound knowledge of the asteroid.
2) ‘Stand-alone Science’ – MASCOT can perform unique investigations of major science importance including those that only a landed package can do, such as geophysics. Direct in situ measurements by the MASCOT instruments will also enable the analytical characterization of the elemental, isotopic and molecular (organic and mineral) composition of 1999JU3’s surface and its near-surface material for samples in their natural state. Since 1999JU3 is a C-type asteroid, the astrobiological relevance of such measurements is significant. In addition, complementing visual documentation at the level of microscope scale would place the analytical results in context to the sample setting. MASCOT will investigate several locations on the asteroid to determine compositional and structural homogeneity and heterogeneity.
3) ‘Reconnaissance & Scouting’ - By supporting Hayabusa-2’s task of obtaining samples relevant to the top-level science objectives, MASCOT can serve as a ‘scouting vehicle’ for assessing candidate sampling sites before the Hayabusa-2 samples are acquired; in other words, if enough lead time for MASCOT deployment is accounted for in mission operations, the final selection of the sampling sites can be guided by the results from the MASCOT instruments.
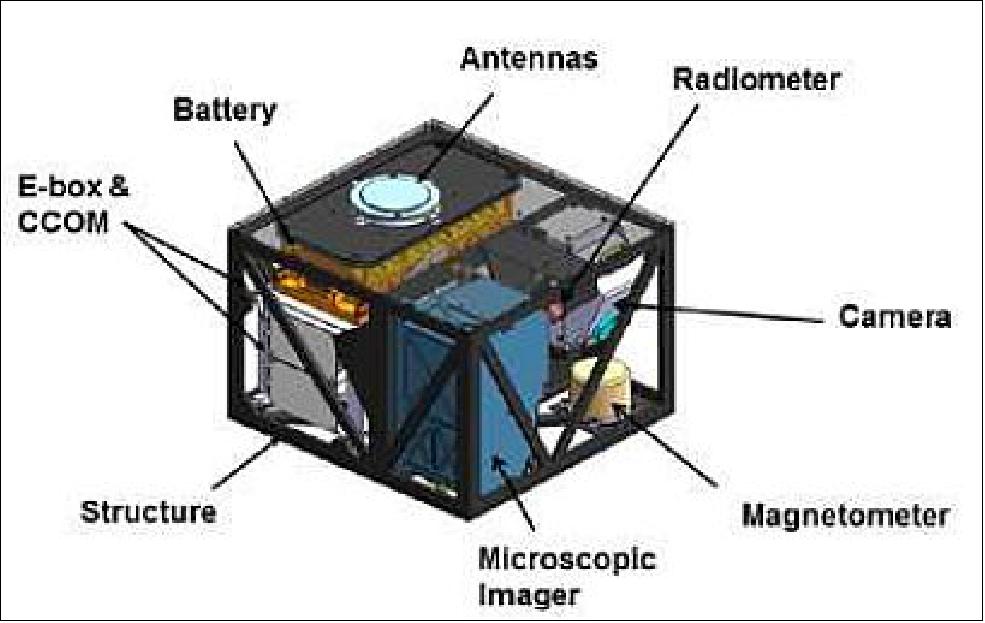
MicrOmega
MicrOmega is a near infrared spectrometer and a hyperspectral infrared microscope for in situ mineralogical analyses of the ground, developed by IAS (Institut d'Astrophysique Spatiale, Orsay). The objective is to characterize the composition of surface samples at their grain scale. Supported by CNES, MicrOmega/MASCOT has been developed within the frame of the Pasteur payload of ExoMars’ rover. It is also derived from a first MicrOmega model which was developed for Phobos Grunt. MicrOmega/MASCOT will enable the first in situ microscopic characterization of a C-type asteroid.
MicrOmega/MASCOT acquires monochromatic images of samples, 128 x 128 pixels of 20 µm2 each. The samples are illuminated by an AOTF-based dispersive system, onto a 2D HgCdTe array, cooled by a dedicated cryocooler. By scanning the illumination wavelength, over the spectral range 0.9 to 3.5 µm with steps of 20 cm-1, 3D (x,y,λ) image cubes are built, in about 10 mn.
The overall instrument, including its driving electronics, has a mass of 2 kg. The detector assembly, the illuminator and the analog electronic box of MicrOmega are shown in Figure 134.

CAM (Camera)
The camera is provided by DLR (Figure 135) is mounted inside the lander slightly tilted, such that the center of its FOV (Field of View) is aimed at the surface at an angle of 22º with respect to the surface plane. This implies that both the surface close to the lander at a distance of 15 cm and the horizon are in the FOV. The optics are designed according to the Scheimpflug principle, which ensures that the entire scene is in focus.
This wide angle camera uses LED illumination for nighttime operation. It is equipped with a 1024 x 1024 pixel CMOS sensor sensitive in the 400-1000 nm wavelength range, and has a FOV of 60° x 60°. The instantaneous field of view is 2.1 mrad/pixel. The camera images will be high priority and involve five pictures per day and four per night. Images will also be made during descent and hopping.
Each photo has a volume of 14.7 Mbit. The instrument has heritage from ExoMars, Rosetta/Philae and the ISS.
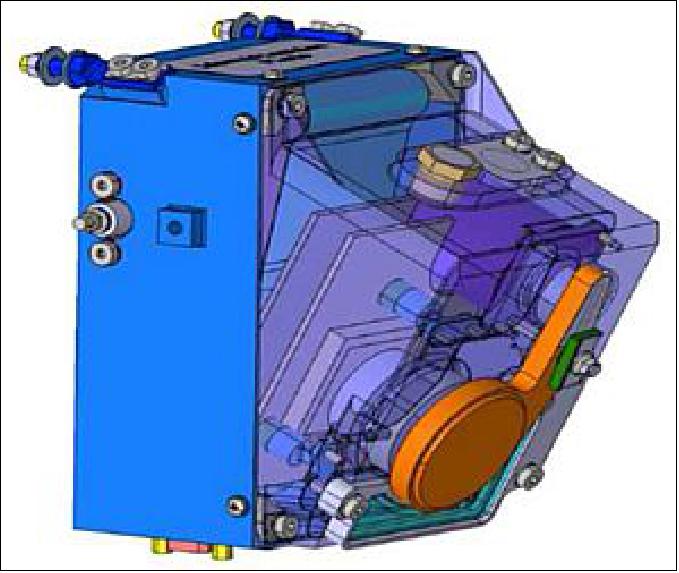
MAG (Magnetometer)
MAG is provided by TU Braunschweig, Germany. As indicated by meteorite composition, the asteroid material is magnetic, but how is the magnetic field arranged? In order to answer the question about the magnetization state of asteroids, MASCOT MAG shall:
- Observe magnetic field profile during descent and hopping
- Determine global and local magnetization of the asteroid.
This will provide new data on asteroid formation and history, and provide deeper insight on early planetary formation stages. MAG (Figure 4) is a three-axial fluxgate vector compensated magnetometer based on a long heritage (Themis, Rosetta, VeX, BepiColombo).Its main performance parameters are :
- Dynamic range is ±50000 nT
- Sensor noise (@1Hz) 10 pT/√Hz
- Resolution 6 pT
- Sampling rate 10 Hz
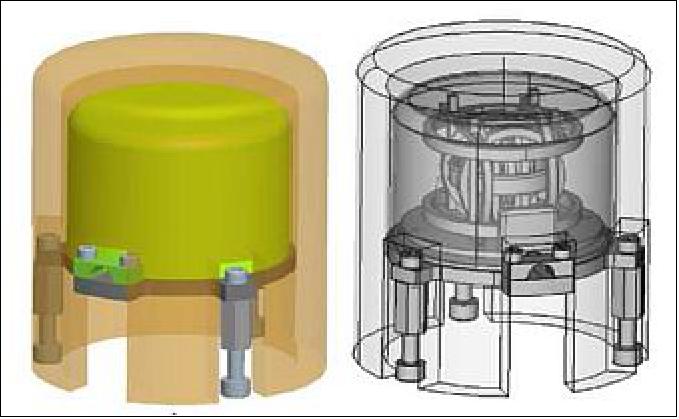
MARA (MASCOT Radiometer)
MARA is a multispectral instrument, provided by DLR, to measure the radiative flux emitted from the asteroid’s surface using thermopile sensors. Six individual filters will be employed to measure the flux in the wavelength bands between 5.5-7, 8-9.5, 9.5-11.5, 13.5-15.5, 8-14, and 5-100 µm. The primary scientific goal of the MARA instrument is the determination of the asteroid’s thermal inertia, the secondary goal is the characterization of the surface mineralogy.
To determine the surface thermal inertia, MARA will measure the temperature of the asteroid’s surface over the period of a full rotation using the long wavelength channel from 5 - 100 µm. In addition, the emissivity of the surface can be determined from the flux in the bandpass filters from 5.5-7, 8-9.5, 9.5-11.5, 13.5-15.5, and 8-14 µm. Thermal inertia can then be determined from an investigation of the surface radiative energy balance.
The mineralogy of the surface can be characterized from an investigation of the radiative flux in the same bandpass channels, as rock forming minerals like olivine and pyroxene have characteristic absorption features in the channels covered by MARA. In addition, the 8 to 14 µm filter is identical to the filter used by the thermal mapper on the Hayabusa-2 spacecraft, such that measurements by MARA can be directly compared to the results obtained from the spacecraft. In this way, MARA can provide ground truth at small scales, thus providing context for the spacecraft measurements.
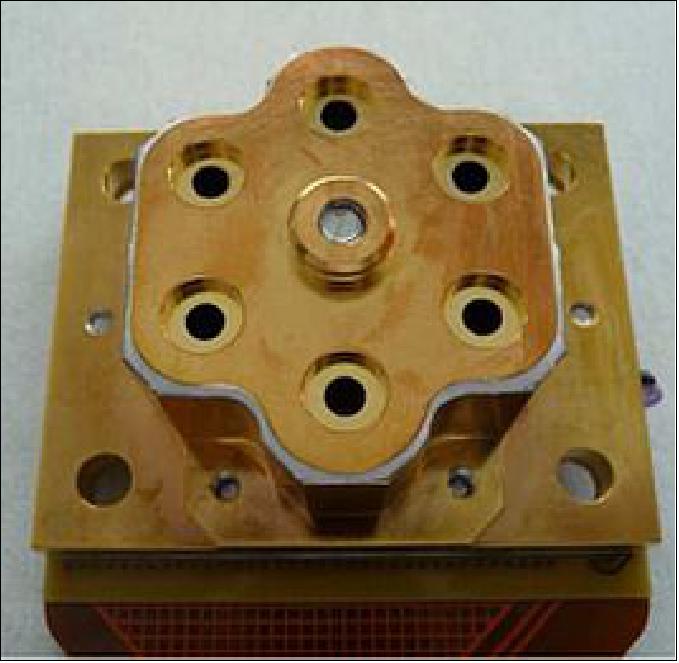
MARA is mounted in between the infrared spectrometer and the camera, such that the FOV of MARA and the camera overlap. MARA consists of the following functional elements:
- Sensor head
- MARA electronics
- In-flight calibration surface.
Overview of MASCOT
In the context of Hayabusa-2 mission, the following major flight operational phases are foreseen for MASCOT:
1) Cruise phase (~4 years): MASCOT is normally off controlled in temperature by Hayabusa-2. At agreed times, MASCOT is activated from the ground to perform checkouts and instrument calibrations; Special operations, like PRM activation, instrument commissioning, on-board software maintenance are also foreseen.
2) Asteroid approach and global mapping: This phase is to characterize the asteroid’s surface and select the target landing site based on scientific relevance and lander’s constraints; Operational preparation for landing will occur: Initial on-board parameter tuning, science command sequences upload, on-asteroid operations rehearsal.
3) Pre-separation: Final on-board parameter tuning, final science command sequences upload, battery depassivation, full MASCOT check-out, lander pre-heating.
4) SDL (Separation, Descent and Landing) and on-asteroid operations: During an Hayabusa-2 descent maneuver, MASCOT will be deployed towards the asteroid’s surface. Primary batteries will supply the power for the mission. Due to the short lifetime (10-16 hrs depending on the mission profile) all operations for science data collection, processing, downlink to Hayabusa-2, uprighting and hopping maneuvers will be fully autonomous, driven by the MAM (Mission Autonomy Manager), an OBSW package. This phase will last up to EOL (End-Of-Life), corresponding to the discharge of the primary batteries.
Autonomous Operations
After the global mapping and pre-separation phase operations, MASCOT will be released towards the asteroid’s surface: Autonomous operations driven by the MAM will start at this point, after the separation detection. Manual commanding from the ground is still possible in parallel to MAM, but its use is only in case of unforeseen contingencies, not handled on-board. MAM commanding can be paused if necessary to avoid interference in the commanding.
MASCOT deployment will occur either during a dedicated Hayabusa-2 descent or during one of the Hayabusa-2 sampling touchdown rehearsals. This maneuver foresees Hayabusa-2 to descent to a separation altitude less than 100 m at which point MASCOT will get ejected via a spring mechanism. As MASCOT has no propulsion system, its descent to the surface of the asteroid will be completely passive, under the effects of the weak asteroid gravity field, followed by a bouncing period, before it comes to rest in
an unknown orientation. The descent to the asteroid after ejection should take approximately 20-30 minutes and the bouncing period strongly depends on the surface characteristics. Communications to Hayabusa-2 will be maintained active throughout this phase.
During descent, MASCOT will measure the asteroid magnetic field by the MAG instrument. The MAM will also schedule several image takings of the asteroid by the CAM instrument (a specific CAM image processing algorithm is implemented in the OBSW to discard dark - night sky - or saturated - sun facing - pictures).
During descent, MASCOT will measure the asteroid magnetic field by the MAG instrument. The MAM will also schedule several image takings of the asteroid by the CAM instrument (a specific CAM image processing algorithm is implemented in the OBSW to discard dark - night sky - or saturated - sun facing - pictures).
Once at rest on the surface, the MAM will start an upright maneuver, in case MASCOT is not laying with the -Z side (bottom) in contact with the surface: This is necessary for CAM, MARA and MicrOmega instrument science operations to characterize the asteroid soil. The upright maneuver may take several attempts and a specific FDIR algorithm has been devised to maximize the chance of success, to cope against adverse surface morphology and possible on-board failures.
Landing is currently foreseen at around the asteroid midday, so the MAM will schedule a day and a night science measurement cycle on the first landing location. Afterwards, the mobility mechanism will be activated by the MAM to send MASCOT in an uncontrolled hop across the asteroid’s surface at a varying distance of up to a few 10 m. Further scientific activities will take place, and then, depending on the power and data download status, a second hop will be considered.
After MASCOT’s release, Hayabusa-2 will return to its home position (HP), hovering 20 km above the asteroid’s surface (Figure 138). During the ascent phase, pictures will be taken from Hayabusa-2 of the MASCOT landing site, using the asteroid camera.
The selected landing site will have to ensure the following characteristics:
- daylight duration between 50% and 70% of the asteroid's rotation period, due to thermal and scientific reasons (one asteroid day is estimated to be ~7.6 hours)
- the duration per asteroid rotation period of visibility of the landing site from Home Position must be over 40% (TM/TC link constraint)
- the velocity at touchdown must be smaller than half the escape velocity
- average surface temperature between -50ºC and +25ºC (under re-assessment) to grant acceptable landing conditions.
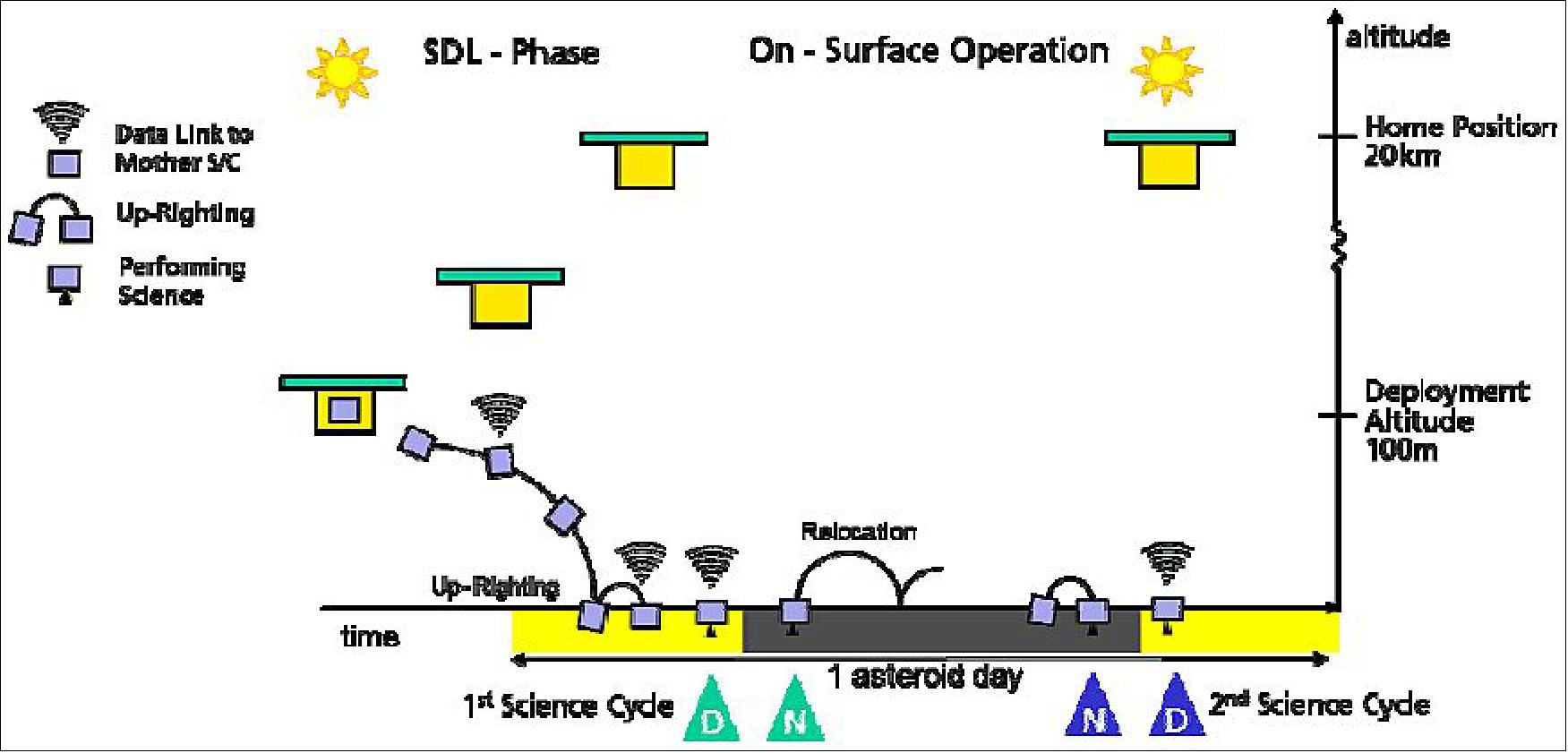
SRC (Sample Return Capsule)
The SRC is designed to deliver the asteroid samples to Earth. A series of major TCM (Trajectory Correction Maneuvers) are to be carried out starting a month before the reentry (R) day. The spacecraft is to be inserted into the reentry orbit targeting the landing center at the final TCM on about R-3 day. A schematic view of the reentry sequence is shown in Figure 139. - The SRC is separated from the mothership about 8 hours before the reentry and the spacecraft will enter the escape trajectory after orbital maneuvering by the RCS while the SRC enters Earth's atmosphere at a velocity of about 12 km/s. After passing through the severe aerodynamic environment, SRC deploys the parachute at the altitude of about 5 km and it descends slowly with beacon signal emitted for localization until landing on the ground. 119)
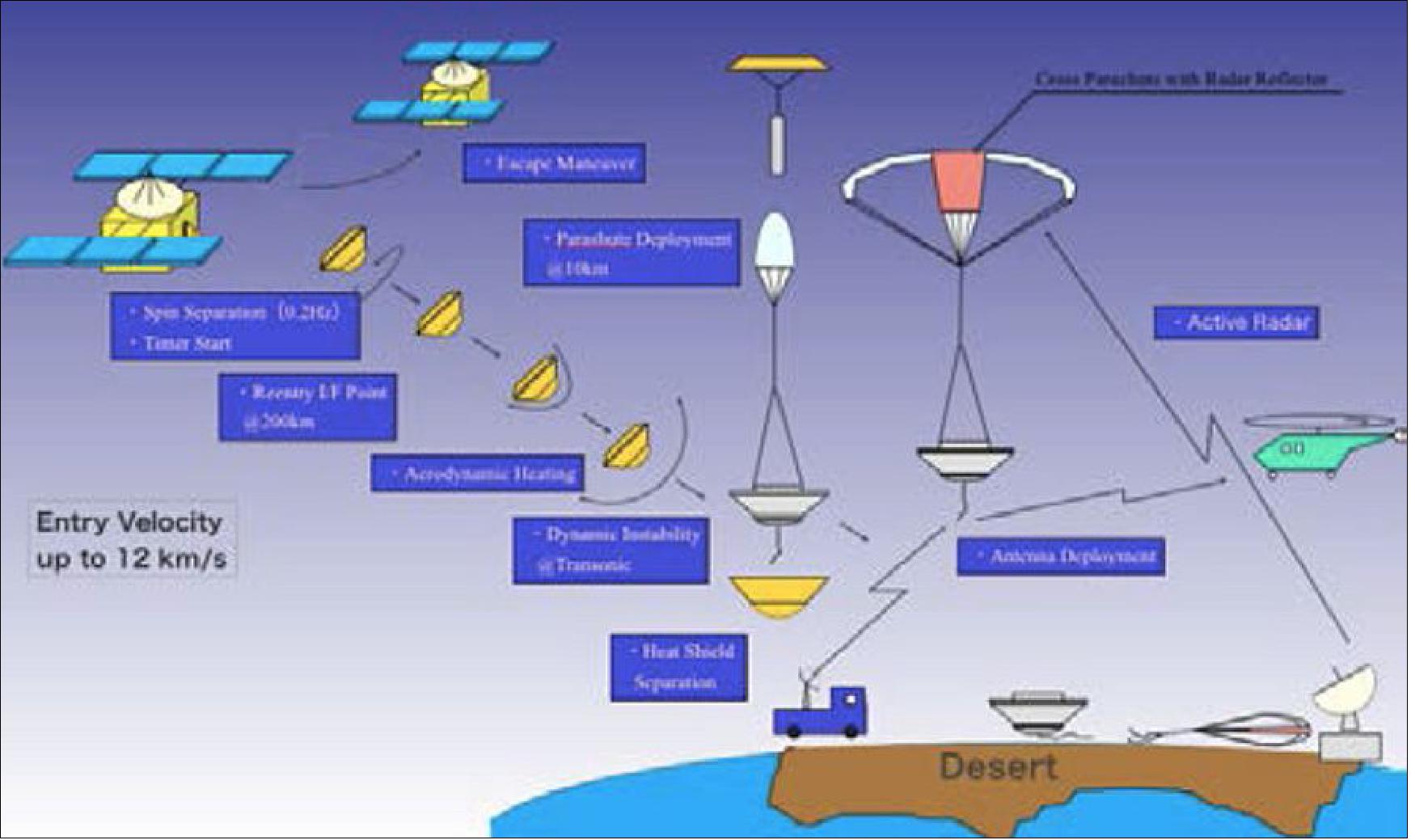
Figure 140 shows the aerodynamic heating environment of the Hayabusa-2 SRC when compared with that of Hayabusa-1 as a function of the flight path angle and the entry velocity. The main parameters dominating the reentry flight environment are the flight path angle and the entry velocity while the effect of the entry position (latitude/longitude) and the flight azimuth direction is secondary, so that we can neglect them at the present discussion. A maximum heat flux of 13 MW/m2 is predicted on the stagnation heat transfer rate with total heat input of 270 MJ/m2.
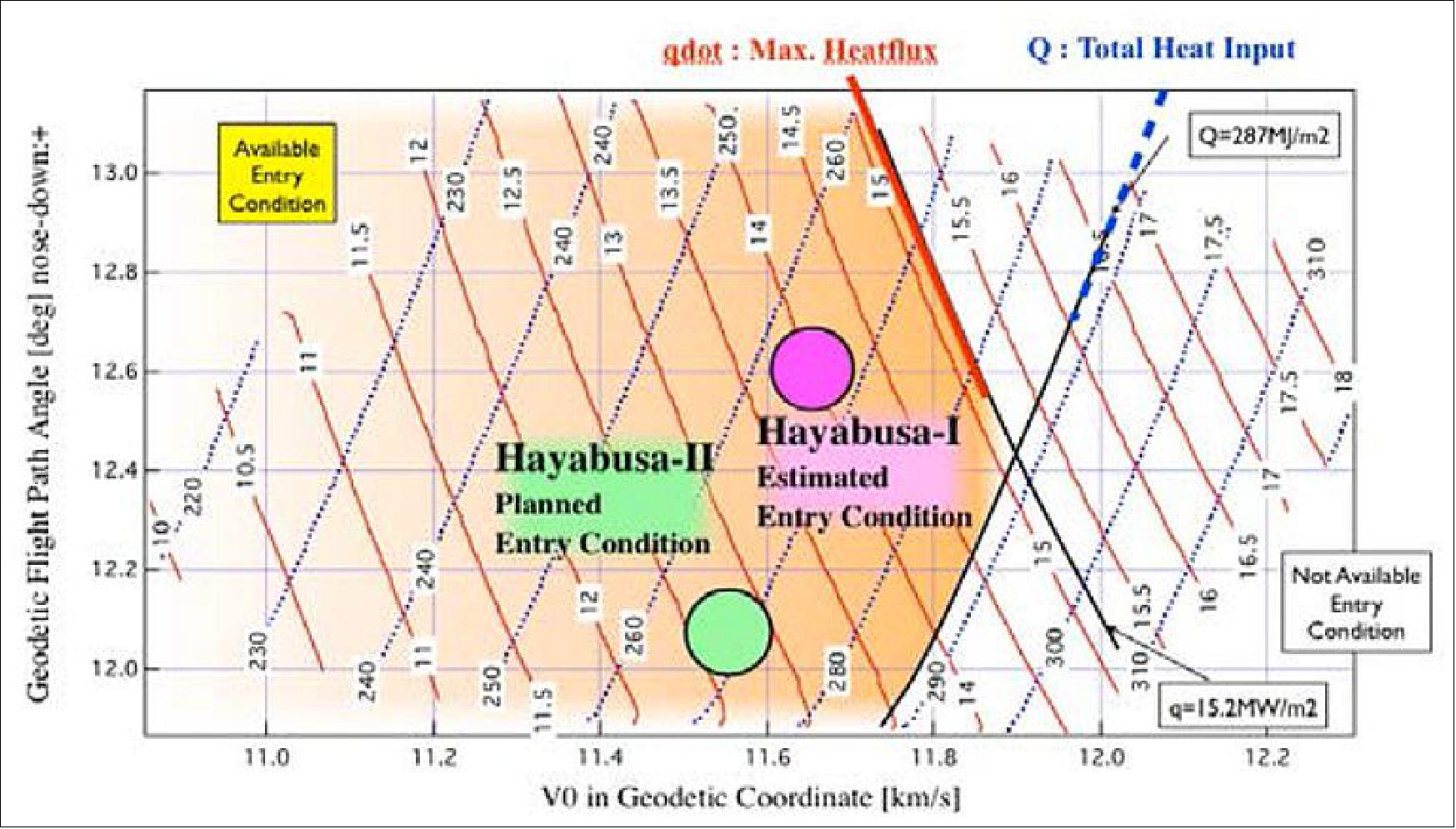
Design and Verification Tests
There are strong demands of short-term development and cost reduction as well as improvement of the reliability for the Hayabusa-2 project. Therefore, the basic design concept for the Hayabusa-2 SRC is not to change the design from the former SRC except for the following items:
1) During the period of over 10 years since the development of the Hayabusa-1 SRC, some components have gone out of production. Since the many electronics parts, including FPGAs, used as the core processors of the SRC instrument module are discontinued, the onboard electronics of the instrument module need to be redesigned.
2) The SRC design needs to be improved based upon the experience of Hayabusa-1 operation. Examples of this case include employing a new HK telemetry for monitoring of the on-board clock accuracy and a backup timer for generating the parachute deployment trigger for the case of an acceleration sensor malfunction.
3) The items judged by their design shall be changed to be compatible with the change of the design condition such as environmental requirements and the design standard of Hayabusa-2 system. Examples of this case include a change of the criterion on the tensional force of the Marman Clamp band of the SRC separation mechanism.
4) The items judged by their design need to be improved to ensure higher reliability based on the result of the design review including the evaluation of the reliability analysis such as FMEA, FTA and SPFA. Examples of this case include a change of an ignition circuit design, strengthening of the puller used for the SRC separation mechanism, and an adoption of the additional O-ring to prevent the inflow of high-temperature gas during reentry operation.
Overview of the SRC Subsystem
Hayabusa-2 SRC is designed with the following functions in its compact body:
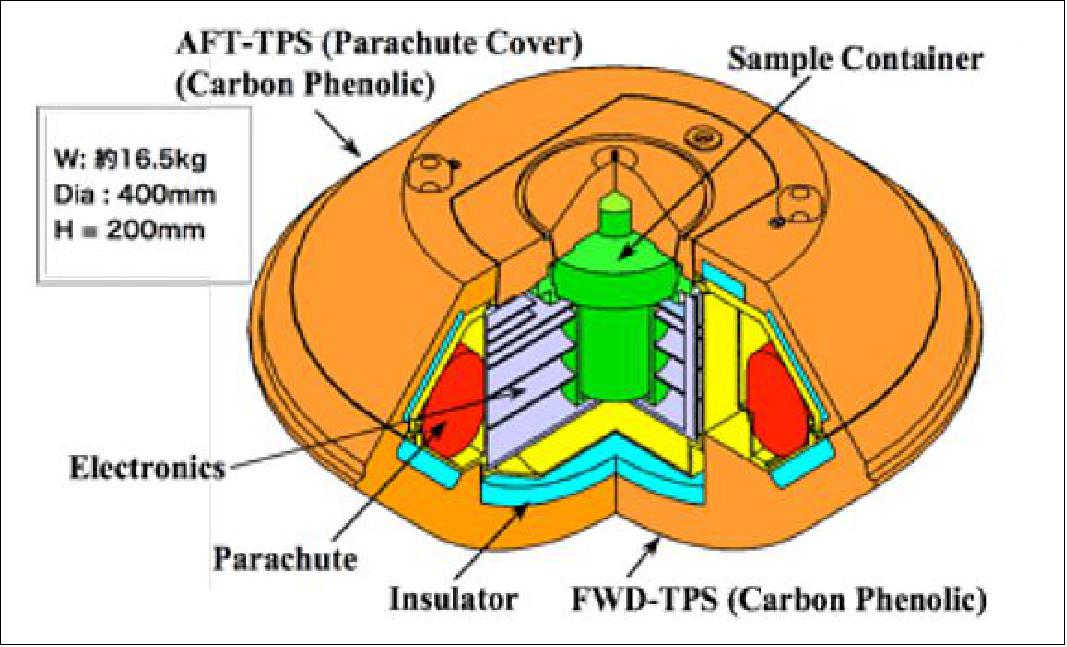
• Sampler Interface: SRC has an interface with the sampler-container system for collecting and storing asteroid sample. The sampler-container is fixed to the inside of the SRC at the time of the launch. The sampler-catcher is held in the sampler-mechanism. After Hayabusa-2 approaches the target asteroid and collects a “sample”, the sampler-catcher is conveyed into the sampler container and is fixed to it with the latch mechanism. The SRC conducts the Earth reentry in the configuration of Figure 141.
• Mothership Interface / SRC Separation Mechanism: In addition to its mechanical I/F, the SRC has electric and thermal I/F with the mother ship, such as HK telemetry, command, heater control, and external power supply from the mothership. The SRC separation mechanism holds the SRC on the mothership during the orbital flight. The mechanism deploys the Merman Clamp band and ejects the SRC from the mothership with proper velocity and spin rate given by the helical coil spring.
• Heatshield and Thermal Protection Subsystem: In order to protect the internal instruments from the aerodynamic heating environment during reentry operation, the SRC is wrapped with an ablator made of carbon phenolic resin. The ablator consists of four parts; the fore body ablator, the aft ablator, the support ablator and the sampler ablator. With the aim of avoiding soakback from the ablator, the instrument box in the SRC throws the fore body ablator and the aft ablator away after passing through the excessively severe aerodynamic environment (Figure 142).
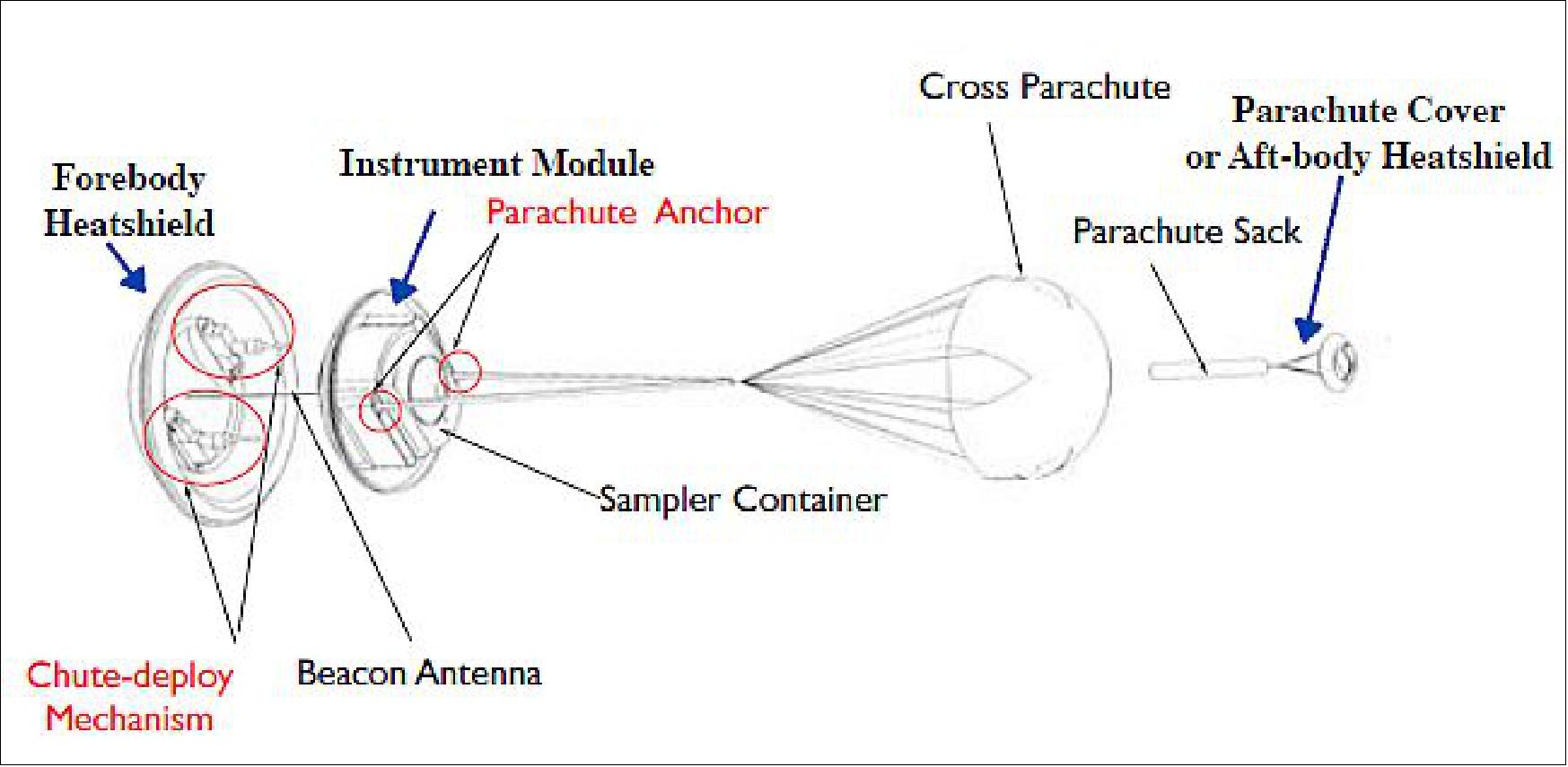
• Descending Subsystem: After the separation of the ablators, the instrument box connected to a parachute starts slow descending. The descending system consists of the cross-type parachute, the parachute deployment mechanism and the ignition circuit (IG-BOX). The instrument box is also equipped with the parachute anchor release mechanism in order to avoid breakage due to dragging by strong ground-winds after landing.
• Beacon Transmission: The beacon antenna is pulled out and hanged from the bottom of the instrument module (I/M) by a small mass at the time of the parachute deployment. And simultaneously, I/M starts transmitting the beacon signal for the localization from the ground stations. The beacon is transmitted even after the instrument box lands on the ground according to the prescribed sequence.
• Reentry Flight Measurement: Hayabusa-2 has a new capability to measure acceleration, attitude motion (angular rate) and the temperature of each part inside the SRC during reentry operation. The measurement data is stored to a memory and is retrieved after recovery. This function is implemented in a new instrument: REMM (Reentry Flight Measurement Module).
REMM is an instrument which was newly developed to add the function of flight environment measurement to SRC. REMM measures the heat shield temperatures, the acceleration and the attitude motion of the SRC during the reentry and records the measurement data to a non-volatile memory. Since there is no structural design change for Hayabusa-2 SRC, only very limited space and mass can be allocated for the REMM. A COTS based design was adopted in design of REMM to meet the requirement under this very strict constraints.
Acceleration | - Range | -50 to +50 G (3-axis) |
Angular rate | - Range | ±200º/s(3-axis) |
Temperature | - Channel number | 13 ch (9 ch for SRC, 4 ch for REMM internal use) |
Measurement duration | 420 s | |
Data storage | Flash memory 8 Mbit x 2 (redundancy) | |
Power supply | Primary cell used separately from the power source for SRC bus electronics. | |
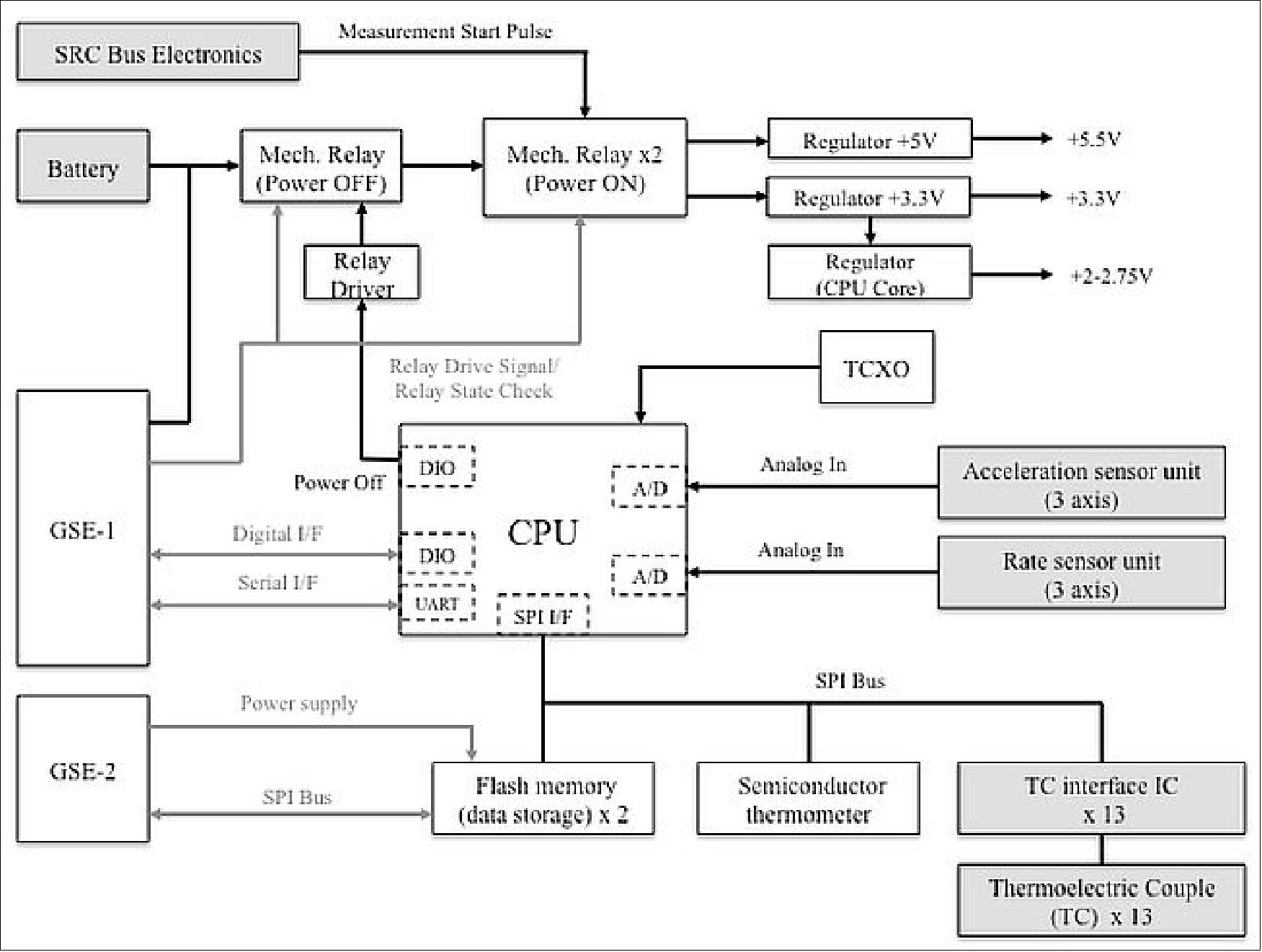
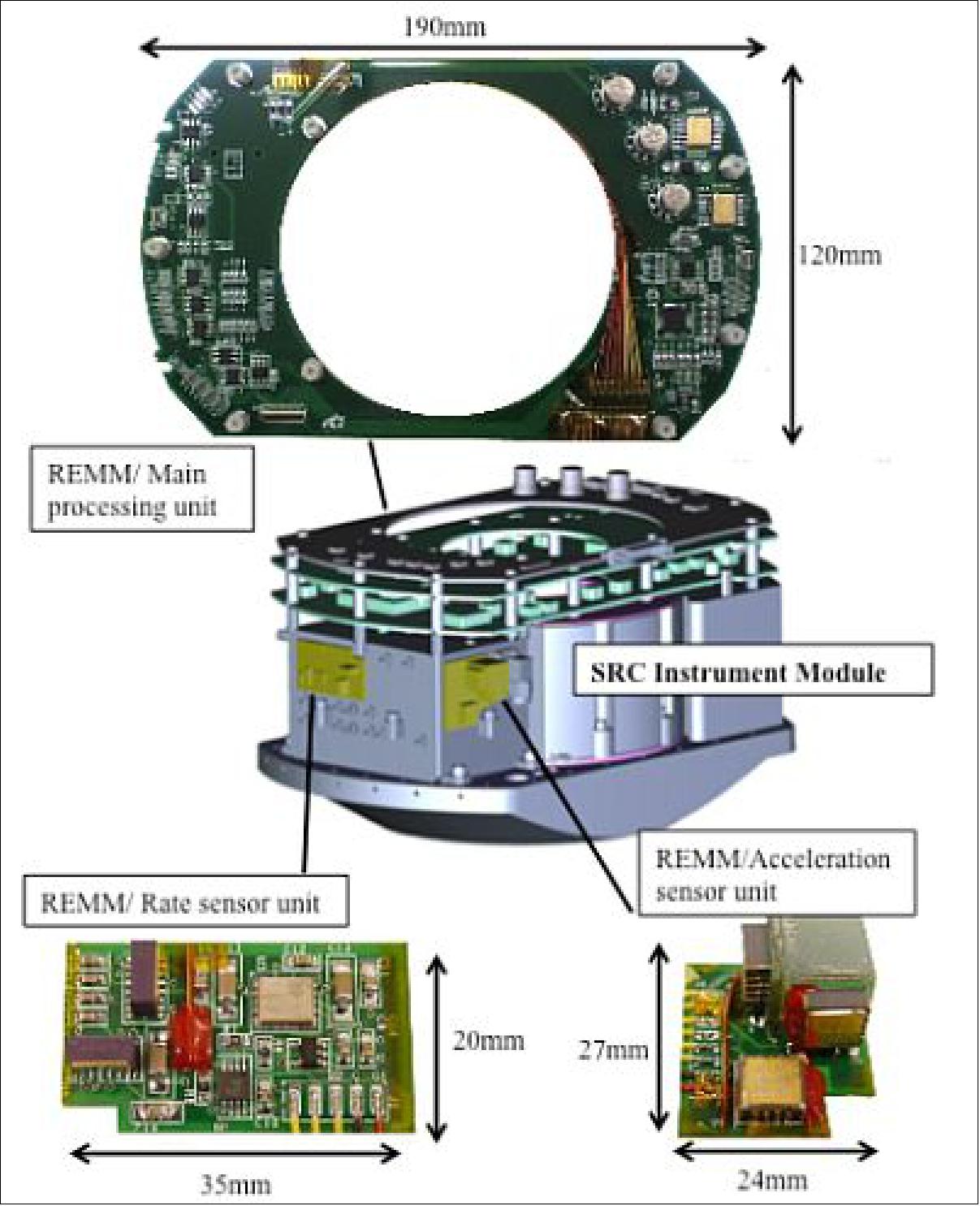
References
1) “Asteroid Explorer Hayabusa2,” JAXA, brochure, URL: http://global.jaxa.jp/activity/pr/brochure/files/sat33.pdf
2) “Hayabusa 2 Project,” JAXA, URL: https://web.archive.org/web/20120222130748/http://b612.jspec.jaxa.jp/hayabusa2/e/hayabusa2_e.html
3) http://www.jspec.jaxa.jp/e/activity/hayabusa2.html
4) H. Kuninaka, “Robotic Pre-Cursor Contribution to Human NEA Mission,” URL: http://www.nasa-usa.de/pdf/604314main_6-GER_WS_JAXA-RoboticPrecursor-Kuninaka.pdf
5) Paul Abell, H. Kuninaka, N. Inaba, Y. Tsuda, M. Yoshikawa, “Hayabusa-2,”11th SBAG (Small Bodies Assessment Group) Meeting, Washington, D.C., July 29-31, 2014, URL: http://www.lpi.usra.edu/sbag/meetings/jul2014/presentations/0330_Tue_Abell_Hyabusa2.pdf
6) Makoto Yoshikawa, Hitishi, Kuninaka, Noriyasu Inaba, Sei-ichiro Watanabe, Yuichi Tsuda, Ryudo Tsukizaki, “Status of the Japanese Hayabusa-2 asteroid explorer mission,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-A7.3.4
7) H. Kuninaka, “Hayabusa-2 Asteroid Sample Return Mission,” 10th SBAG (Small Bodies Assessment Group) Meeting, Washington, D.C., Jan. 8-9,2014, URL: http://www.lpi.usra.edu/sbag/meetings/jan2014/presentations/09_1500_Kuninaka_Haya2-SBAG.pdf
8) Hitoshi Kuninaka, Hajime Yano, “Hayabusa-2: Carbonaceous Asteroid Sample Return Mission,” The 10th IAA International Conference on Low-Cost Planetary Missions,” Pasadena, CA, USA, June 18-20, 2013, URL: http://www.lcpm10.caltech.edu/pdf/session-3/4_LCPM2013-Hayabusa2-HK%2BHY.pdf
9) Sho Sasaki, Makoto Yoshikawa, Hayabusa-2 Project Team, “The Next Asteroid Sample Return Mission of Japan - Hayabusa-2,” March 5, 2011, URL: http://www.lpi.usra.edu/meetings/sssr2011/presentations/yoshikawa.pdf
10) Yuya Mimasu, Go Ono, Kosuke Akatsuka, Fuyuto Terui, Naoko Ogawa, Takanao Saiki, Yuichi Tsuda, ”Attitude Control of Hayabusa2 by Solar Radiation Pressure in One Wheel Control Mode,” Proceedings of the 25th International Symposium on Space Flight Dynamics, Munich, Germany, Oct. 19-23, 2015, URL: http://issfd.org/2015/files/downloads/papers/129_Mimasu.pdf
11) “Launch Success of H-IIA Launch Vehicle No. 26 with "Hayabusa2" Onboard,” JAXA Press Release, December 3, 2014, URL: http://global.jaxa.jp/press/2014/12/20141203_h2af26.html
12) “MASCOT en route to Asteroid 1999 JU3,” DLR, Dec. 3, 2014, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-12372/year-all/#/gallery/17357
13) Bruno Victorino Sarli, Yoshihide Sugimoto, Chit Hong Yam, Stefano Campagnola, Naoya Ozaki, Hongru Chen, Shintaro Nakajima, Satoshi Ogura, Ryu Funase, Yasuhiro Kawakatsu, Shinichi Nakasuka, “PROCYON Mission: A Micro-Spacecraft to an Asteroid,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14, A3.P, 41
14) ”Could the Asteroid Ryugu Be a Remnant of an Extinct Comet? Scientists Now Answer!,” Nagoya City University, 18 March 2022, URL: https://www.nagoya-cu.ac.jp/english/research-news/20220318/
15) Hitoshi Miura, Eizo Nakamura, and Tak Kunihiro, ”The Asteroid 162173 Ryugu: a Cometary Origin,” The Astrophysical Journal Letters, Volume 925, Number 2, Published: 31 January 2022, https://doi.org/10.3847/2041-8213/ac4bd5, URL: https://iopscience.iop.org/article/10.3847/2041-8213/ac4bd5/pdf
16) ”Remote sensing data sheds light on when and how asteroid Ryugu lost its water,” Brown University, 5 January 2021, URL: https://www.brown.edu/news/2021-01-05/ryugu
17) K. Kitazato, R. E. Milliken, T. Iwata, M. Abe, M. Ohtake, S. Matsuura, Y. Takagi, T. Nakamura, T. Hiroi, M. Matsuoka, L. Riu, Y. Nakauchi, K. Tsumura, T. Arai, H. Senshu, N. Hirata, M. A. Barucci, R. Brunetto, C. Pilorget, F. Poulet, J.-P. Bibring, D. L. Domingue, F. Vilas, D. Takir, E. Palomba, A. Galiano, D. Perna, T. Osawa, M. Komatsu, A. Nakato, T. Arai, N. Takato, T. Matsunaga, M. Arakawa, T. Saiki, K. Wada, T. Kadono, H. Imamura, H. Yano, K. Shirai, M. Hayakawa, C. Okamoto, H. Sawada, K. Ogawa, Y. Iijima, S. Sugita, R. Honda, T. Morota, S. Kameda, E. Tatsumi, Y. Cho, K. Yoshioka, Y. Yokota, N. Sakatani, M. Yamada, T. Kouyama, H. Suzuki, C. Honda, N. Namiki, T. Mizuno, K. Matsumoto, H. Noda, Y. Ishihara, R. Yamada, K. Yamamoto, F. Yoshida, S. Abe, A. Higuchi, Y. Yamamoto, T. Okada, Y. Shimaki, R. Noguchi, A. Miura, N. Hirata, S. Tachibana, H. Yabuta, M. Ishiguro, H. Ikeda, H. Takeuchi, T. Shimada, O. Mori, S. Hosoda, R. Tsukizaki, S. Soldini, M. Ozaki, F. Terui, N. Ogawa, Y. Mimasu, G. Ono, K. Yoshikawa, C. Hirose, A. Fujii, T. Takahashi, S. Kikuchi, Y. Takei, T. Yamaguchi, S. Nakazawa, S. Tanaka, M. Yoshikawa, S. Watanabe, Y. Tsuda, ”Thermally altered subsurface material of asteroid (162173) Ryugu,” Nature Astronomy, Published: 4 January 2021, https://doi.org/10.1038/s41550-020-01271-2
18) ”Analysis results from the gas collected from the sample container of the asteroid explorer, Hayabusa2,” JAXA Press Release, 15 December 2020, URL: https://global.jaxa.jp/press/2020/12/20201215-2_e.html
19) Lonnie Shekhtman, ”Asteroid Ryugu Dust Delivered to Earth; NASA Astrobiologists Prepare to Probe It,” NASA Feature, 7 December 2020, URL: https://www.nasa.gov/feature/goddard/2020/asteroid-ryugu-dust-delivered-to-earth-nasa-astrobiologists-prepare-to-probe-it
20) ”Completion of Transportation of the Hayabusa2 Re-entry Capsule to the JAXA Sagamihara Campus,” JAXA Press Release, 8 December 2020, URL: https://global.jaxa.jp/press/2020/12/20201208-1_e.html
21) Sara Hussein, ”Japan space agency hails return of asteroid dust on Earth,” Phys.org, 7 December 2020, URL: https://phys.org/news/2020-12-japan-space-agency-hails-asteroid.html
22) ”The Results of “Hayabusa-2” Reentry Capsule Recovery,” JAXA Press Release, 6 December 2020, URL: https://global.jaxa.jp/press/2020/12/20201206-1_e.html
23) ”Hera team congratulates JAXA on asteroid sample return,” ESA Safety & Security, 06 December 2020, URL: https://www.esa.int/Safety_Security/Hera/Hera_team_congratulates_JAXA_on_asteroid_sample_return
24) ”Asteroid Ryugu shaken by Hayabusa2’s impactor,” Kobe University, 30 October 2020, URL: https://www.kobe-u.ac.jp/research_at_kobe_en/NEWS/news/2020_10_29_01.html
25) M. Arakawa, T. Saiki, K. Wada, K. Ogawa, T. Kadono, K. Shirai, H. Sawada, K. Ishibashi, R. Honda, N. Sakatani, Y. Iijima, C. Okamoto, H. Yano, Y. Takagi, M. Hayakawa, Miche, M. Jutzi, Y. Shimaki, S. Kimura, Y. Mimasu, T. Toda, H. Imamura, S. Nakazawa, H. Hayakawa, S. Sugita, T. Morota, S. Kameda, E. Tatsumi, Y. Cho, K. Yoshioka, Y. Yokota, M. Matsuoka, M. Yamada, T. Kouyama, C. Honda, Y. Tsuda, S. Watanabe, M. Yoshikawa, S. Tanaka, F. Terui, S. Kikuchi, T. Yamaguchi, N. Ogawa, G. Ono, K. Yoshikawa, T. Takahashi, Y. Takei, A. Fujii, H. Takeuchi, Y. Yamamoto, T. Okada, C. Hirose, S. Hosoda, O. Mori, T. Shimada, S. Soldini, R. Tsukizaki, T. Iwata, M. Ozaki, M. Abe, N. Namiki, K. Kitazato, S. Tachibana, H. Ikeda, N. Hirata, N. Hirata, R. Noguchi, A. Miura, ”An artificial impact on the asteroid (162173) Ryugu formed a crater in the gravity-dominated regime,” Science, 03 April 2020, Vol. 368, Issue 6486, pp. 67-71, DOI: 10.1126/science.aaz1701
26) ”The Hayabusa2 Re-entry Capsule Approved to Land in Australia,” JAXA Press Release, 19 August 2020, URL: https://global.jaxa.jp/press/2020/08/20200819-1_e.html
27) ”JAXA-the Australian Space Agency Joint Statement for Cooperation in the Hayabusa2 Sample Return Mission,” JAXA Press Release, 14 July 2020, URL: https://global.jaxa.jp/press/2020/07/20200714-1_e.html
28) ”Start of the 2nd ion engine operation,” JAXA, 13 May 2020, URL: http://www.hayabusa2.jaxa.jp/en/topics/20200513_2nd/
29) ”Hayabusa2 reveals more secrets from Ryugu’s interaction with the sun changes what we know about asteroid history,” University of Tokyo Press Release, 11 May 2020, URL: https://www.u-tokyo.ac.jp/focus/en/press/z0508_00111.html
30) ”Hayabusa2's touchdown on Ryugu reveals its surface in stunning detail,” Space Daily, 8 May 2020, URL: https://www.spacedaily.com/reports/Hayabusa2s_touchdown_on_Ryugu_reveals_its_surface_in_stunning_detail_999.html
31) T. Morota, S. Sugita, Y. Cho, M. Kanamaru, E. Tatsumi, N. Sakatani, R. Honda, N. Hirata, H. Kikuchi, M. Yamada, Y. Yokota, S. Kameda, M. Matsuoka, H. Sawada, C. Honda, T. Kouyama, K. Ogawa, H. Suzuki, K. Yoshioka, M. Hayakawa, N. Hirata, M. Hirabayashi, H. Miyamoto, T. Michikami, T. Hiroi, R. Hemmi, O. S. Barnouin, C. M. Ernst, K. Kitazato, T. Nakamura, L. Riu, H. Senshu, H. Kobayashi, S. Sasaki, G. Komatsu, N. Tanabe, Y. Fujii, T. Irie, M. Suemitsu, N. Takaki, C. Sugimoto, K. Yumoto, M. Ishida, H. Kato, K. Moroi, D. Domingue, P. Michel, C. Pilorget, T. Iwata, M. Abe, M. Ohtake, Y. Nakauchi, K. Tsumura, H. Yabuta, Y. Ishihara, R. Noguchi, K. Matsumoto, A. Miura, N. Namiki, S. Tachibana, M. Arakawa, H. Ikeda, K. Wada, T. Mizuno, C. Hirose, S. Hosoda, O. Mori, T. Shimada, S. Soldini, R. Tsukizaki, H. Yano, M. Ozaki, H. Takeuchi, Y. Yamamoto, T. Okada, Y. Shimaki, K. Shirai, Y. Iijima, H. Noda, S. Kikuchi, T. Yamaguchi, N. Ogawa, G. Ono, Y. Mimasu, K. Yoshikawa, T. Takahashi, Y. Takei, A. Fujii, S. Nakazawa, F. Terui, S. Tanaka, M. Yoshikawa, T. Saiki, S. Watanabe, Y. Tsuda, ”Sample collection from asteroid (162173) Ryugu by Hayabusa2: Implications for surface evolution,” Science, Vol. 368, Issue 6491, pp. 654-659, https://doi.org/10.1126/science.aaz6306, Published: 8 May 2020, URL: https://science.sciencemag.org/content/sci/368/6491/654.full.pdf
32) Tatsuaki Okada, Tetsuya Fukuhara, Satoshi Tanaka, Makoto Taguchi, Takehiko Arai, Hiroki Senshu, Naoya Sakatani, Yuri Shimaki, Hirohide Demura, Yoshiko Ogawa, Kentaro Suko, Tomohiko Sekiguchi, Toru Kouyama, Jun Takita, Tsuneo Matsunaga, Takeshi Imamura, Takehiko Wada, Sunao Hasegawa, Jörn Helbert, Thomas G. Müller, Axel Hagermann, Jens Biele, Matthias Grott, Maximilian Hamm, Marco Delbo, Naru Hirata, Naoyuki Hirata, Yukio Yamamoto, Seiji Sugita, Noriyuki Namiki, Kohei Kitazato, Masahiko Arakawa, Shogo Tachibana, Hitoshi Ikeda, Masateru Ishiguro, Koji Wada, Chikatoshi Honda, Rie Honda, Yoshiaki Ishihara, Koji Matsumoto, Moe Matsuoka, Tatsuhiro Michikami, Akira Miura, Tomokatsu Morota, Hirotomo Noda, Rina Noguchi, Kazunori Ogawa, Kei Shirai, Eri Tatsumi, Hikaru Yabuta, Yasuhiro Yokota, Manabu Yamada, Masanao Abe, Masahiko Hayakawa, Takahiro Iwata, Masanobu Ozaki, Hajime Yano, Satoshi Hosoda, Osamu Mori, Hirotaka Sawada, Takanobu Shimada, Hiroshi Takeuchi, Ryudo Tsukizaki, Atsushi Fujii, Chikako Hirose, Shota Kikuchi, Yuya Mimasu, Naoko Ogawa, Go Ono, Tadateru Takahashi, Yuto Takei, Tomohiro Yamaguchi, Kent Yoshikawa, Fuyuto Terui, Takanao Saiki, Satoru Nakazawa, Makoto Yoshikawa, Seiichiro Watanabe,Yuichi Tsuda, ”Highly porous nature of a primitive asteroid revealed by thermal imaging,” Nature, Vol. 1445, Published: 16 March, 2020, https://doi.org/10.1038/s41586-020-2102-6
33) ”Asteroid Ryugu likely link in planetary formation,” DLR News, 16 March 2020, URL: https://www.dlr.de/content/en/articles/news/2020/01/20200316_asteroid-ryugu-likely-link-in-planetary-formation.html
34) “Welcome back HAYABUSA to Earth after overcoming various difficulties!,” JAXA, June 14, 2010, URL: http://www.isas.jaxa.jp/e/topics/2010/0614.shtml
35) “Identification of origin of particles brought back by Hayabusa,” JAXA, Nov. 16, 2010, URL: http://www.jaxa.jp/press/2010/11/20101116_hayabusa_e.html
36) Ute Schönfelder, ”An iron-clad asteroid,” FSU, 28 February 2020, URL: https://web.archive.org/web/20200812095612/https://www.uni-jena.de/en/200228_Itokawa_Iron_whiskers.html
37) Toru Matsumoto, Dennis Harries, Falko Langenhorst, Akira Miyake & Takaaki Noguchi, ”Iron whiskers on asteroid Itokawa indicate sulfide destruction by space weathering,” Nature Communications, Volume 11, Article number: 1117, Published: 28 February 2020, https://doi.org/10.1038/s41467-020-14758-3, URL: https://www.nature.com/articles/s41467-020-14758-3.pdf
38) ”Impact crater data analysis of Ryugu asteroid illuminates complicated geological history,” Kobe University, 27 November 2019, URL: https://www.kobe-u.ac.jp/research_at_kobe_en/NEWS/news/2019_11_27_01.html
39) Naoyuki Hirata, Tomokatsu Morota, Yuichiro Cho, Masanori Kanamaru, Sei-ichiro Watanabe, Seiji Sugita, Naru Hirata, Yukio Yamamoto, Rina Noguchi, Yuri Shimaki, Eri Tatsumi, Kazuo Yoshioka, Hirotaka Sawada, Yasuhiro Yokota, Naoya Sakatani, Masahiko Hayakawa, Moe Matsuoka, Rie Honda, Shingo Kameda, Manabu Yamada, Toru Kouyama, Hidehiko Suzuki, Chikatoshi Honda, Kazunori Ogawa, Yuichi Tsuda, Makoto Yoshikawa, Takanao Saiki, Satoshi Tanaka, Fuyuto Terui, Satoru Nakazawa, Shota Kikuchi, Tomohiro Yamaguchi, Naoko Ogawa, Go Ono, Yuya Mimasu, Kent Yoshikawa, Tadateru Takahashi, Yuto Takei, Atsushi Fujii, Hiroshi Takeuchi, Tatsuaki Okada, Kei Shirai, Yu-ichi Iijima, ”The spatial distribution of impact craters on Ryugu,” Icarus, Volume 338, 1 March 2020, 113527, https://doi.org/10.1016/j.icarus.2019.113527 , Available online 5 November 2019.
40) ”Hayabusa2 departs from Ryugu,” JAXA Press Release, 13 November 2019, URL: https://global.jaxa.jp/press/2019/11/20191113a.html
41) Yuichi Tsuda, Takanao Saiki, Fuyuto Terui, Satoru Nakazawa, Makoto Yoshikawa and Sei-ichiro Watanabe, ”Hayabusa-2 Mission Status: Landing, Roving and Cratering on Asteroid Ryugu,” Proceedings of the 70th IAC (International Astronautical Congress), Washington DC, USA, 21-25 October 2019, paper: IAC-19-A3.4A.2, URL: https://iafastro.directory/iac/proceedings/IAC-19/IAC-19/A3/4A/manuscripts/IAC-19,A3,4A,2,x52566.pdf
42) H. Yabuta, S. Watanabe, T. Nakamura, N. Hirata, S. Sugita, T. Okada, K Kitazato,Y. Ishihara, T. Morota, N. Sakatani, K. Matsumoto, K. Wada, S. Tachibana, M. Komatsu, E. Tatsumi, M. Matsuoka, C. Honda, T. Hiroi, S. Senshu, R. Honda, Y. Yokota, R. Noguchi, Y. Shimaki, D. L. Domingue, L. Le Corre, A. M. Barucci, E. Palomba, S. Kikuchi, A. Miura, T. Yamaguchi, Y. Yamamoto, T. Saiki, S. Tanaka, M. Yoshikawa, Y. Tsuda, Hayabusa2 Lssaa, Lss-Ids Teams, ”Landing Site Selection for Hayabusa2: Scientific Evaluation of the Candidate Sites on Asteroid (162173) Ryugu,” 50th Lunar and Planetary Science Conference, held 18-22 March, 2019 at The Woodlands, Texas. LPI Contribution No. 2132, id.2304, Published: March 2019
43) ”MASCOT confirms what scientists have long suspected - Small fragments of carbon-rich asteroids are too fragile to survive entry into Earth’s atmosphere,” DLR News, 15 July 2019, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-36790/year-all/#/gallery/36016
44) M. Grott, J. Knollenberg, J. Knollenberg, M. Hamm, K. Ogawa, R. Jaumann, K. A. Otto, M. Delbo, P. Michel, J. Biele, W. Neumann, M. Knapmeyer, E. Kührt, H. Senshu, T. Okada, J. Helbert, A. Maturilli, N. Müller, A. Hagermann, N. Sakatani, S. Tanaka, T. Arai, S. Mottola, S. Tachibana, I. Pelivan, L. Drube, J.-B. Vincent, H. Yano, C. Pilorget, K. D. Matz, N. Schmitz, A. Koncz, S. E. Schröder, F. Trauthan, M. Schlotterer, C. Krause, T.-M. Ho and A. Moussi-Soffys, ”Low thermal conductivity boulder with high porosity identified on C-type asteroid (162173) Ryugu,” Nature Astronomy Letter, Published: 15 July 2019, https://doi.org/10.1038/s41550-019-0832-x
45) Kyoko Hasegawa, ”Japan's Hayabusa2 probe makes 'perfect' touchdown on asteroid,” Phys.org, 11 July 2019, URL. https://phys.org/news/2019-07-japan-hayabusa2-probe-touchdown-asteroid.html
46) ”2nd touchdown image bulletin,” JAXA Hayabusa-2 Project, 11 July 2019, http://www.hayabusa2.jaxa.jp/en/topics/20190711e_PPTD_ImageBulletin/
47) ”Successful Operation of Asteroid Explorer Hayabusa2's SCI,” JAXA Press Release, 25 April 2019, URL: http://global.jaxa.jp/press/2019/04/20190425a.html
48) ”Asteroid Explorer Hayabusa2's SCI Completes Operation,” JAXA Press Release, 5 April 2019, URL: http://global.jaxa.jp/press/2019/04/20190405b.html
49) ”Plume from impact,” ESA, 22 April 2019, URL: http://m.esa.int/spaceinimages/Images/2019/04/Plume_from_impact
50) ”Hayabusa2 probes asteroid Ryugu for secrets,” Science Daily, 19 March 2019, URL: https://www.sciencedaily.com/releases/2019/03/190319125904.htm
51) S. Sugita, R. Honda, T. Morota, S. Kameda, H. Sawada, E. Tatsumi, M. Yamada, C. Honda, Y. Yokota, T. Kouyama, N. Sakatani, K. Ogawa, H. Suzuki, T. Okada, N. Namiki, S. Tanaka, Y. Iijima (deceased), K. Yoshioka, M. Hayakawa, Y. Cho, M. Matsuoka, N. Hirata, N. Hirata, H. Miyamoto, D. Domingue, M. Hirabayashi, T. Nakamura, T. Hiroi, T. Michikami, P. Michel, R.-L. Ballouz, O. S. Barnouin, C. M. Ernst, S. E. Schröder, H. Kikuchi, R. Hemmi, G. Komatsu, T. Fukuhara, M. Taguchi, T. Arai, H. Senshu, H. Demura, Y. Ogawa, Y. Shimaki, T. Sekiguchi, T. G. Müller, A. Hagermann, T. Mizuno, H. Noda, K. Matsumoto, R. Yamada, Y. Ishihara, H. Ikeda, H. Araki, K. Yamamoto, S. Abe, F. Yoshida, A. Higuchi, S. Sasaki, S. Oshigami, S. Tsuruta, K. Asari, S. Tazawa, M. Shizugami, J. Kimura, T. Otsubo, H. Yabuta, S. Hasegawa, M. Ishiguro, S. Tachibana, E. Palmer, R. Gaskell, L. Le Corre, R. Jaumann, K. Otto, N. Schmitz, P. A. Abell, M. A. Barucci, M. E. Zolensky, F. Vilas, F. Thuillet, C. Sugimoto, N. Takaki, Y. Suzuki, H. Kamiyoshihara, M. Okada, K. Nagata, M. Fujimoto, M. Yoshikawa, Y. Yamamoto, K. Shirai, R. Noguchi, N. Ogawa, F. Terui, S. Kikuchi, T. Yamaguchi,§, Y. Oki, Y. Takao, H. Takeuchi, G. Ono, Y. Mimasu, K. Yoshikawa, T. Takahashi, Y. Takei, A. Fujii, C. Hirose, S. Nakazawa, S. Hosoda, O. Mori, T. Shimada, S. Soldini, T. Iwata, M. Abe, H. Yano, R. Tsukizaki, M. Ozaki, K. Nishiyama, T. Saiki, S. Watanabe, Y. Tsuda, ”The geomorphology, color, and thermal properties of Ryugu: Implications for parent-body processes,” Science, 19 March 2019: eaaw0422, DOI: 10.1126/science.aaw0422, https://doi.org/10.1126/science.aaw0422
52) ”Hayabusa-2 Latest Status, the Successful First Touchdown,” JAXA Press Release, 22 February 2019, URL: http://global.jaxa.jp/press/2019/02/20190222a.html
53) John Davis, Hayabusa2 has touched down on Ryugu!,” Planetary Society, 21 Feb. 2019, URL: http://www.planetary.org/blogs/jason-davis/hayabusa2-touches-down.html
54) ”The touchdown site,” JAXA, 22 February 2019, URL: http://www.hayabusa2.jaxa.jp/en/topics/20190220e_TDPoint/
55) ”[HAYABUSA2 PROJECT] Shooting bullets into Ryugu!,” JAXA, 18 February 2019, URL: http://global.jaxa.jp/projects/sat/hayabusa2/topics.html#topics14057
56) http://www.hayabusa2.jaxa.jp/en/topics/20190214e_Experiment/
57) ”Locations on the surface of Ryugu have been named!,” JAXA Hayabusa-2 project, 21 January 2019, URL: http://www.hayabusa2.jaxa.jp/en/topics/20190121e_Nomenclature/
58) ”Hayabusa2 status (the week of 2018.12.17),” JAXA, 28 December 2018, URL: http://www.hayabusa2.jaxa.jp/en/news/status/
59) ”Spacecraft orbit during solar conjunction,” JAXA, 25 December 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181225e_Conjunction/
60) ”Astrodynamics and the Gravity Measurement Descent Operation,” JAXA, 21December 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181225e_AstroDynamics/
61) ”The highest resolution image of Ryugu (resolution update : the highest resolution image to date),” JAXA, 26 October 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181026e_TD1R1A_ONCT/
62) ”Sampler horn imaged by the Small Monitor Camera,” JAXA, 26 October 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181026e_CAM-H/
63) Koji Matsumoto, ”One month of results from the Hayabusa2 laser altimeter,” JAXA, 26 October 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181026e_lidar/
64) ”Special session and press conference on Hayabusa2 to be held at DPS,” JAXA, 25 October 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181025e_DPS/
65) ”TD1-R1-A operation schedule,” JAXA, Hayabusa-2 Project, 14 October 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181014e_TD1-R1-A/
66) ”Numerous boulders, many rocks, no dust: MASCOT's zigzag course across the asteroid Ryugu,” DLR News, 12 October 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-30235/year-all/#/gallery/32338
67) ”Japan delays touchdown of Hayabusa2 probe on asteroid: official,” Space Daily, 11 October 2018, URL: http://www.spacedaily.com/reports/Japan_delays_touchdown_of_Hayabusa2_probe_on_asteroid_official_999.html
68) ”Three hops in three asteroid days – MASCOT successfully completes the exploration of the surface of asteroid Ryugu,” DLR, 5 October 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-30138/year-all/#/gallery/32253
69) Tra-Mi Ho, Ralf Jaumann, Jean-Pierre Bibring, Matthias Grott, David Herčík, Stephan Ulamec, Jens Biele, Jan Thimo Grundmann, Christian Krause, Oliver Küchemann, Caroline Lange, Michael Lange, Laurence Lorda, Michael Maibaum, Aurelie Moussi, Celine Cenac-Morthe, Tatsuaki Okada, Josef Reill, Kaname Sasaki, Norbert Toth,Yuichi Tsuda, Tetsuo Yoshimitsu and the MASCOT Team, ”MASCOT: Latest News of Landing on (162173) Ryugu,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18,A3,4A,2
70) ”MASCOT lands safely on asteroid Ryugu,” DLR News, 03 October 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-30118/year-all/#/gallery/32231
71) ”The small asteroid lander, MASCOT,” JAXA, 02 October, 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20181002e_MSC/
72) ”MINERVA-II1: Images from the surface of Ryugu,” JAXA, 23 09.2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20180927e_MNRV/
73) ”A shadowy selfie taken 180 million miles away,” ESA, Operations image of the week, 27 September 2018, URL: http://m.esa.int/spaceinimages/Images/2018/09/A_shadowy_selfie_taken_180_million_miles_away
74) ”MINERVA-II1: Successful image capture, landing on Ryugu and hop!,” JAXA, 21 September 2018, URL: http://www.hayabusa2.jaxa.jp/en/topics/20180922e/
75) ”Japan space robots start asteroid survey,” Space Daily, 22 September 2018, URL: http://www.spacedaily.com/reports/Japan_space_robots_start_asteroid_survey_999.html
76) ”Landing site on the asteroid Ryugu determined,” DLR, 23 August 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29511/year-all/
77) ”Imaging Ryugu from an altitude of 6 km,” JAXA, 25 July 2018, URL: http://global.jaxa.jp/projects/sat/hayabusa2/topics.html#topics12394
78) http://www.hayabusa2.jaxa.jp/topics/20180725je/index_e.html
79) Manuela Braun, ”Landing on Ryugu – a surface with a view of boulders - Interview with Ralf Jaumann, DLR planetary researcher and Principal Investigator of the MASCOT lander ,” DLR, 14 August, 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29344/year-2018/#/gallery/31672
80) ”Asteroid Ryugu,” ESA, 28 June 2018, URL: http://m.esa.int/spaceinimages/Images/2018/06/Asteroid_Ryugu
81) ”Hayabusa2 Rendezvous with Ryugu,” JAXA Press Release, 27 June 2018, URL: http://global.jaxa.jp/press/2018/06/20180627_hayabusa2.html
82) ”Hayabusa2 and MASCOT lander nearing Ryugu,” DLR, 15 June 2018, URL: http://www.dlr.de/blogs/en/all-blog-posts/Hayabusa2-and-MASCOT-lander-nearing-Ryugu.aspx
83) ”Current status of the asteroid explorer, Hayabusa2, leading up to arrival at asteroid Ryugu in 2018,” JAXA Hayabusa-2 Project, 14 June 2018, URL: http://global.jaxa.jp/projects/sat/hayabusa2/pdf/Hayabusa2_Press20180614e.pdf
84) ”Hayabusa2 has detected Ryugu!,” JAXA, 1 March 2018, URL: http://www.hayabusa2.jaxa.jp/topics/20180301_e/
85) ”Hayabusa2 has detected Ryugu,” JAXA Press Release, 1 March 2018, URL: http://global.jaxa.jp/press/2018/03/20180301_hayabusa2.html
86) Tomohiro Yamaguchi, Takanao Saiki, Satoshi Tanaka, Yuto Takei, Tatsuaki Okada, Tadateru Takahashi, Yuichi Tsuda, ”Hayabusa2-Ryugu Proximity Operation Planning and Landing Site Selection,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17-A3.4A.7
87) Christian Ziach, Volodymyr Baturkin, Christian Grimm, Jan Thimo Grundmann, Tra-Mi Ho, Caroline Lange, Kaname Sasaki, Nawarat Termtanasombat, Norbert Toth, Elisabet Wejmo, Maximilian Maier, Josef Reill, Hans-Jürgen Sedlmayr, Friederike Wolff, Michael Lange, Olaf Mierheim, Jens Biele, Barbara Cozzoni, Cinzia Fantinati, Koen Geurts, Kagan Kayal, Christian Krause, Oliver Küchemann, Michael Maibaum, Stephan Ulamec, Matthias Grott, Ralf Jaumann, Céline Cénac-Morthe, Muriel Deleuze, Clément Dudal, David Granena, Laurence Lorda, Aurélie Moussi, Jean-Pierre Bibring, David Hercik, Hans-Ulrich Auster, Yuya Mimasu, Tatsuaki Okada, Takanao Saiki, Sathoshi Tanaka, Fuyuto Terui, Yuichi Tsuda, Tomohiro Yamaguchi, Tetsuo Yoshimitsu, Seiichiro Watanabe, ”MASCOT – preparations for its landing in 2018: a status update from ground and space one year ahead of the landing on Ryugu,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17-A3.4.7
88) Yuichi Tsuda, Sei-ichiro Watanabe, Takanao Saiki, Makoto Yoshikawa, Satoru Nakazawa, ”Cruise Status of Hayabusa2 : Round Trip Mission to Asteroid 162173 Ryugu,” Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16.A3.4.5
89) Ono Go, Yuichi Tsuda, Kosuke Akatsuka, Takanao Saiki, Yuya Mimasu, Naoko Ogawa, and Fuyuto Terui. "Generalized Attitude Model for Momentum-Biased Solar Sail Spacecraft", Journal of Guidance, Control, and Dynamics, Vol. 39, No. 7,2016, pp. 1491-1500
90) ”Health check for asteroid lander MASCOT,” DLR, July 14, 2016, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-18664/year-all/#/gallery/23720
91) ”The Optical Link Experiment with the Laser Altimeter (LIDAR),” JAXA, Dec. 25, 2015, URL: http://www.hayabusa2.jaxa.jp/topics/20151225_02_e/
92) ”Hayabusa2 Earth Swing-by Result,” JAXA, Dec. 14, 2015, URL: http://global.jaxa.jp/press/2015/12/20151214_hayabusa2.html#pic1
93) Takanao Saiki , Hiroshi Takeuchi, Tomohiro Yamaguchi, Yuto Takei, Satoshi Tanaka, Yuichi Tsuda, ”Hayabusa2 Earth Swing-by Operation Results,” Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16-A3.4.4
94) ”Hayabusa2 Earth Swing-by,” JAXA, Dec. 3, 2015, URL: http://global.jaxa.jp/projects/sat/hayabusa2/topics.html#topics6403
95) ”ESA station tracks Earth flyby mission,” ESA, Dec. 3, 2015, URL: http://www.esa.int/Our_Activities/Operations/Estrack/ESA_station_tracks_Earth_flyby_mission
96) ”Name Selection of Asteroid 1999 JU3 Target of the Asteroid Explorer “Hayabusa2” ,” JAXA Press Release, Oct. 5, 2015, URL: http://global.jaxa.jp/press/2015/10/20151005_ryugu.html
97) “Hayabusa2 second ion engine continuous operation completed,” JAXA, June 8, 2015, URL: http://global.jaxa.jp/projects/sat/topics.html
98) “Tracking Japan's Asteriod Impact Mission,” ESA, April 29, 2015, URL: http://www.esa.int/Our_Activities/Operations/Tracking_Japan_s_asteroid_impact_mission
99) “Baton passes to new Hayabusa2 project manager,” JAXA, April 10, 2015, URL: http://global.jaxa.jp/projects/sat/hayabusa2/topics.html#topics4474
100) H. Senshu, S. Oshigami, R. Yamada, M. Kobayashi, N. Namiki, T. Mizuno, and the Hayabusa-2 LIDAR science team, “Dust count mode of LIDAR onboard Hayabusa-2,” 46th LPSC (Lunar and Planetary Science Conference), The Woodlands, TX, USA, March 16-20, 2015, paper:1863, URL: http://www.hou.usra.edu/meetings/lpsc2015/pdf/1863.pdf
101) S. Oshigami, H. Senshu, R. Yamada, N. Namiki, T. Mizuno, and the Hayabusa-2 LIDAR science team, “Detectability of levitation dust around the asteroid by Hayabusa-2 LIDAR,”Detectability of levitation dust around the asteroid by Hayabusa-2 LIDAR,” 46th LPSC (Lunar and Planetary Science Conference), The Woodlands, TX, USA, March 16-20, 2015, paper:1292, URL: http://www.hou.usra.edu/meetings/lpsc2015/pdf/1292.pdf
102) “Hayabusa2 initial functional confirmation completed and moved to cruising phase to asteroid 1999 JU3,” JAXA, March 5, 2015, URL: http://global.jaxa.jp/projects/sat/hayabusa2/topics.html
103) “Hayabusa2 in great shape – Initial functional confirmation going smoothly,” JAXA, Feb. 3, 2015, URL: http://global.jaxa.jp/projects/sat/hayabusa2/topics.html#topics3767
104) M. Yoshikawa, “Status Update of Hayabusa2,” 52nd session of the Scientific and Technical Subcommittee, UNOOSA (United Nations Office for Outer Affairs), Vienna, Austria, Feb. 2-13, 2015, URL: http://www.unoosa.org/pdf/pres/stsc2015/tech-17E.pdf
105) “Asteroid Explorer "Hayabusa-2" Completion of Critical Operation Phase,” JAXA Press Release, Dec. 5, 2014, URL: http://global.jaxa.jp/press/2014/12/20141205_hayabusa2.html
106) “Asteroid Explorer "Hayabusa2" Flight Status and Orbit Calculation Result,” JAXA Press Release, Dec. 3, 2014, URL: http://global.jaxa.jp/press/2014/12/20141203_hayabusa2.html
107) “Overview of Hayabusa2 major onboard instruments,” JAXA, URL: http://global.jaxa.jp/projects/sat/hayabusa2/instruments.html
108) T. Okada, T. Fukuhara, S. Tanaka, M. Taguchi, T. Arai, H. Senshu, N. Sakatani, Y. Ogawa, H. Demura, K. Kitazato, T. Kouyama, T. Sekiguchi, S. Hasegawa, T. Matsunaga, T. Wada, T. Imamura, J. Takita, Y. Shimaki, H. Kyoda, Y. Aoki, J. Helbert, T.G. Mueller, A. Hagermann, and Hayabusa-2 Thermal-Infrared Imager (TIR) Team, ”Thermal Infrared Imager TIR on Hayabusa-2 and its preparation for asteroid proximity phase operations around 162173 Ryugu,” 49th Lunar and Planetary Science Conference 2018 (LPI Contrib. No. 2083), The Woodlands, Texas, USA, March 19-23, 2018, URL: https://www.hou.usra.edu/meetings/lpsc2018/pdf/1403.pdf
109) Tetsuo Yoshimitsu, Takashi Kubota, Atsushi Tomiki, ”Asteroid surface exploration rovers developed for Hayabusa-2 mission,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A3.4.5
110) K. Ogawa, M. Arakawa, H. Sawada, Y. Iijima, K. Wada, R. Honda, K. Shirai, K. Ishibashi, N. Sakatani , T. Kadono, S. Nakazawa, M. Kobayashi, H. Hayakawa, “Development of Hayabusa-2 Deployable Camera (DCAM3) for observation of impact simulation on asteroid,” EPSC Abstracts, Vol. 8, EPSC2013-733, 2013 EPSC (European Planetary Science Congress), 2013, URL: http://meetingorganizer.copernicus.org/EPSC2013/EPSC2013-733.pdf
111) ”Hayabusa-2 Optical Navigation Camera (ONC),” JAXA, 2017, URL: http://darts.isas.jaxa.jp/pub/hayabusa2/onc_bundle/browse/
112) Pierre W. Bousquet, Muriel Deleuze, Elisabet Canalias, Tra-Mi Ho, Stephan Ulamec, Ralf Jaumann, Matthias Grott, Karl Heinz Glassmeier, Jean-Pierre Bibring, Tatsuaki Okada, “MASCOTt, a small asteroid lander ready for launch on Hayabusa-2,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-A3.4.7
113) M. Schlotterer, R. Findlay, T.-M. Ho, L. Witte, C. Ziach, “Histogram filter for attitude determination of small asteroid lander,” GNC 2014: 9th International ESA Conference on Guidance, Navigation Control Systems, Porto, Protugal, June 2-6, 2014, URL: http://elib.dlr.de/90209/1/1425_Schlotterer.pdf
114) Christian Ziach, Volodymyr Baturkin, Tra-Mi Ho, Christian Grimm, Jan Thimo Grundmann, Caroline Lange, Nawarat Termtanasombat, Elisabet Wejmo, Ross Findly, Josef Reill, Michael Lange, Olaf Mierheim, Jens Biele, Christian Krause, Stephan Ulamec, Belinda Borgs, Matthias Grott, Ralf Jaumann, Muriel Deleuze, Jean-Pierre Bibring, Hans-Ulrich Auster and the MASCOT Project Team, ”MASCOT, the small mobile asteroid landing package on its piggyback journey to 1999 JU3: pre-launch and post-launch activities,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A3.4.6
115) Michael Lange, Christian Hühne, Olaf Mierheim, ”Detailed structural design and corresponding manufacturing techniques of the MASCOT Landing Module for the Hayabusa2 mission,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-C2.9.9
116) Aurélie Moussi, Laurence Lorda, Céline Cénac-Morthé, David Granena, Clement Dudal, Elisabet Canalias, Thierry Martin, Muriel Deleuze, Jean-Pierre Bibringb, Vincent Hamm, Cédric Pilorget,Tra-Mi Ho, Christian Ziach, Jan Thimo Grundmann , Nawarat Termtanasombat, Christian Krause, Cinzia Fantinati, Michael Maibaum, Barbara Cozzoni , Jens Biele, Yuya Mimasu, Tatsuaki Okada, Takanao Saiki, Sathoshi Tanaka, Fuyuto Terui, Yuichi Tsuda, Tomohiro Yamaguchi, Tetsuo Yoshimitsu, Seiichiro Watanabe, ”French Contributions to HAYABUSA-2-MASCOT: Philae mission’s inheritance?,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17-A3.4.8
117) Federico Cordero, Johan Marx, Eduard Baumstark, Kağan Kayal, Tra-Mi Ho, Christian Ziach, Caroline Lange, Nawarat Termtanasombat, Jan Thimo Grundmann, Christian Krause, ”MASCOT Lander Operational Concept and its Autonomy, General Services and Resource Optimisation Implementation in the On-Board Software,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, paper: AIAA 2016 2016 2386, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2386
118) C.Dudal, A. Moussi-Soffys, T. Yoshimitsu, F. Cordero, N. Toth, C. Grimm, M. Wrasmann, T.-M.Ho, ”MASCOT: Communications with a small probe on Ryugu asteroid,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-III-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4573&context=smallsat
119) Tetsuya Yamada, Keisuke Yoshihara, “Design review of Hayabusa-2 reentry capsule and further technology development for future missions,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14.A3.4.6
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement MASCOT Sample Return Capsule References Back to Top