ISS: ATV-5 (Automated Transfer Vehicle-5, Georges Lemaître)
Non-EO
ESA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA |
| Launch date | 29 Jul 2014 |
| End of life date | 15 Feb 2015 |
ISS Services: ATV-5 (Automated Transfer Vehicle-5, Georges Lemaître)
Launch Experiments Mission Status Background References
ATV-5 is ESA's next (and last) supply ship to the ISS (International Space Station) scheduled for the summer of 2014. ATV-5 is named after the Belgian astronomer Georges Edouard Lemaître (1894-1966).
Georges Lemaître was a Belgian priest, astronomer and professor of physics at the Université Catholique de Louvain. Georges Lemaître was the first to suggest that the Universe had a definite beginning where all matter and energy were concentrated in one point – the theory of the Big Bang was born. He was also the first person to propose the theory of the expansion of the Universe, widely misattributed to Edwin Hubble. In addition, Georges Lemaître was also the first to derive what is now known as Hubble's law and made the first estimation of what is now called the Hubble constant, which he published in 1927, two years before Hubble's article. 1) 2)
The ATV-5 was built for ESA by ADS (Airbus Defence and Space), formerly Astrium, as system leader of a European consortium. The ATV is Europe's modern and reliable space transporter, equipped with unique systems for automated and autonomous rendezvous and docking.
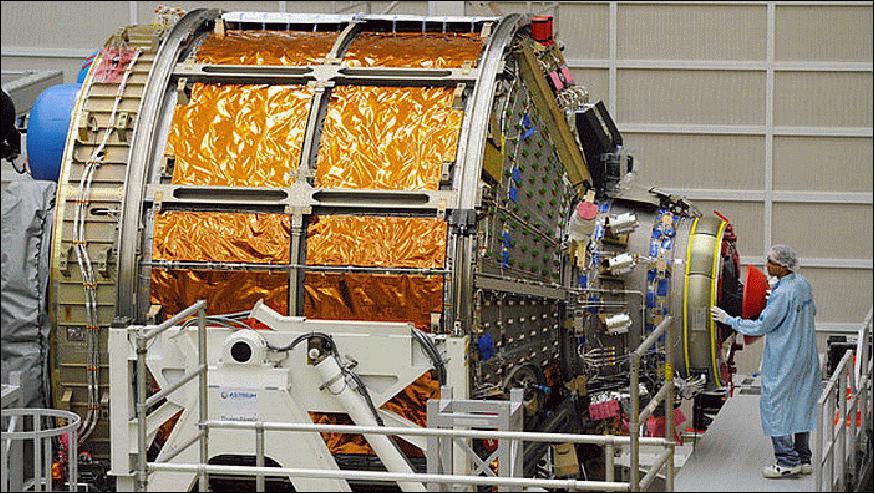
Like its predecessors, ATV-5 "Georges Lemaître" is being transported by ship in three special containers from Bremen to the European spaceport in Kourou. At the same time, around 80 sea containers full of test equipment are joining it on its journey. Final assembly of the spacecraft will be carried out at the Kourou spaceport, including the ICC (Integrated Cargo Carrier), the solar panels and the SDM (Separation and Distancing Module) which forms the interface between the ATV and Ariane. The ATV will then undergo further extensive testing on site before being integrated as a payload into the fairing of an Ariane 5, then fuelled and connected. The launch of the "Georges Lemaître" is scheduled for June 2014. 4)

With a launch mass of 20 metric tons, the ATV has a maximum net cargo capacity of up to 7 metric tons. The composition of this payload can vary depending on the mission: between 1.5 and 5.5 metric tons of freight and supplies (food, research instruments, tools, etc.), up to 840 kg of drinking water, up to 100 kg of gases (air, oxygen and nitrogen), up to four metric tons of fuel for orbit correction, and up to 860 kg of propellant to refuel the space station. Powered by the ATV Service Module, the ICC (Integrated Cargo Carrier) makes up 60% of ATV's total volume.
The ATV front cone contains avionics and propulsion hardware: 6)
• 2 telegoniometers, which continuously calculate distance and direction from ATV to the International Space Station
• 2 videometers, an image processing system able to compute distance and orientation of the ISS
• 2 star trackers, which are able to recognize constellations in the sky
• 2 visual video targets are used by crew for visual monitoring of ATV's final approach
• 8 mini jets for attitude control.
Russian docking system: The nose of the ICC contains Russian-made docking equipment and various kinds of rendezvous sensors. The Russian docking system allows for physical, electrical and propellant connections with the Station as well as providing access to the habitable module when docked.
With the ATV securely docked, the Station's crew can enter the cargo section and remove payload such as maintenance supplies, science hardware, and parcels of fresh food, mail and messages from their families. Meanwhile, ATV's liquid tanks can be connected to the Station's own plumbing to transfer their contents.
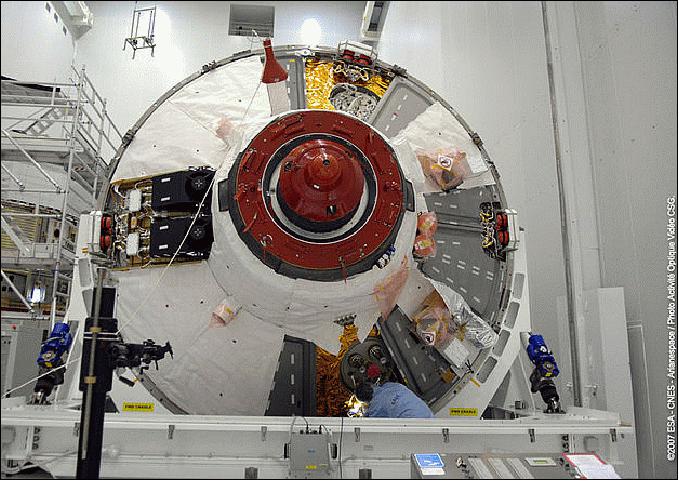
The front cone of the ICC accommodates the 235 kg Russian docking system with its 80 cm diameter hatch, its alignment mechanism and its 1 m long extendible probe. During rendezvous with ISS, the ATV is the active spacecraft and is equipped with an arrow-shaped probe mechanism. The Space Station has receiving-cone mechanisms at the docking ports which are routinely used for Russian Soyuz and Progress spacecraft dockings.
Spacecraft
The ATV spacecraft is cylindrical and is 10.3 m long and 4.5 m in diameter with a launch mass of ~20,500 kg. It consists of two modules, the Service Module and the ICC (Integrated Cargo Carrier). ATV has a pressurized volume of ~48 m3 and is the largest ISS resupply vehicle currently flying to the International Space Station. The spacecraft is protected by an insulation blanket that is white in color and an MMOD shield to protect the vehicle from any orbital debris and micrometeoroids.
The ICC represents 60% of ATV's total volume. The module is based on the Italian-built MPLM (Multi-Purpose Logistics Module) that was used by the Space Shuttle to carry pressurized cargo to the Space Station. It is outfitted with accommodations to carry dry cargo and fluid cargo that is carried in two dedicated compartments: the pressurized module that is accessible by the crew and contains the dry cargo, and the non-pressurized part that carries the liquid cargo. In total, ATV can carry 7,500 kg of cargo to ISS. This includes 1,500 to 5,500 kg of dry cargo, up to 840 kg of water, up to 100 kg of compressed gases, and up to 830 kg of ISS refueling propellant. Additionally, ATV can provide up to 4,700 kg of propellants for ISS reboosts during its docked mission.
The ICC can facilitate eight standard payload racks which can be used to safely carry cargo bags and other dry cargo to the Space Station. The aft and forward sections of the ATV can also be used to carry cargo to ISS with cargo bags being secured in place with cargo straps.
Launch mass | ~20,500 kg |
Length, diameter, pressurized volume | 10.3 m, 4.5 m, 48 m3 |
Payload | 7,500 kg |
Span of vehicle | 22.3 m |
Power generation, generated power, power storage | 4 solar arrays, 4.8 kW, 40 Ah batteries |
Main propulsion | 4 R-4D-11 - 490N |
Attitude control | 28 x 220 N thrusters |
The Unpressurized Cargo Carrier is behind the back wall of the pressurized section. It houses 22 spherical fluid tanks of different sizes and colors. These tanks contain all fluids delivered to ISS aboard ATV. The toxic propellants can be transferred via an interface that is located inside the docking interface between the spacecraft and ISS. It is important that the propellant transfer lines do not pass through the crew cabin as any leak could cause serious health issues for the crew members. After fuel transfers are complete, the transfer lines are vented to avoid decontamination.
Launch
The ATV-5 space freighter, Georges Lemaître, was launched on July 29, 2014 (23:47 GMT) onboard an Ariane 5 ES launcher from Europe's Spaceport in Kourou, delivering 6.6 tons of supplies, including 2680 kg of dry cargo and 3922 kg of water, propellants and gases to the International Space Station. ATV-5 is the heaviest spacecraft ever launched by Ariane 5 with a launch mass of 20,275 kg. 7) 8) 9)
ATV-5 is scheduled for a 14-day flight to the station, with docking to the aft port of the Russian Zvezda service module on Aug. 12, 2014. 10) During its trip, ATV-5 flew about 6 km below the space station on Aug. 8, to test sensors for potential use on future European spacecraft before beginning the final phase of its rendezvous with the orbital laboratory. The ATV-5 is expected to remain docked until late January 2015.
The fifth ATV, and final space freighter in the series, is designated Georges Lemaître (1894-1966) after the Belgian physicist (Catholic priest and astronomer) and father of the Big Bang theory (published in 1927).
ATV-5 will resupply the International Space Station, in addition to performing maneuvers that maintain this manned facility's nominal orbit and testing new rendezvous sensors in space.
Orbit: Near-circular orbit, altitude of ~ 415 km, inclination= 51.6º, period of 92.7 minutes.
Sensor Complement
Haptic-1 Experiment
Stowed inside ESA's next supply ship to the ISS will be one of the most advanced joysticks ever built, designed to test the remote control of robots on the ground from up in orbit. The consignment includes the first sustained test of how astronauts experience ouch-based feedback in weightlessness. 11)
The experiment comes down to a deceptively simple-looking lever that can be moved freely to play basic Pong-style computer games. Performance readings from these games, along with follow-up questionnaires, will analyze the effects on human motor control when exposed to long-term weightlessness, and how feedback feels in orbit.
The body-mounted astronaut joystick is intended for the Haptics-1 experiment, developed by ESA's Telerobotics and Haptics Laboratory as part of the multi-agency Meteron (Multi-Purpose End-to-End Robotic Operation Network) initiative, investigating telerobotics for space.

Behind the scenes, a complex suite of servo motors can withstand any force an astronaut operator might unleash on it, while generating forces that the astronaut will feel in turn – just like a standard video gaming joystick as a player encounters an in-game obstacle.
The difference in orbit is that, to quote Isaac Newton, ‘every action has an equal and opposite reaction' – so to prevent the joystick's force feedback pushing its free-floating user around it is mounted to a body harness that can be fixed in turn to standard Station equipment.
Getting the hardware to be extremely precise yet incredibly sturdy was the project's main challenge. The resulting system can produce minute forces most people are not sensitive enough to feel, but astronauts could kick it and it will still work and respond correctly.
Seven different tests are planned so far, with more in the pipeline – new tests can be uploaded easily. A touchscreen tablet will be used to load software and conduct the experiments.
The experiment of ESA/ESTEC will be the first time hardware is flown in orbit for the multi-agency Meteron (Multi-Purpose End-to-End Robotic Operation Network) initiative, investigating telerobotics for space.
Meteron is being carried out in partnership with several NASA centers, Germany's DLR space agency and Russian partners including Roscosmos, the R&D Institute of Robotics and Technical Cybernetics in St Petersburg and the space company Energia.
LIRIS (Laser InfraRed Imaging Sensors)
The objective is to test new rendezvous sensors in space as ATV-5 approaches the International Space Station. ESA has set its sights on allowing future spacecraft to rendezvous with ‘uncooperative targets', such as orbiting debris or a Mars sample capsule. LIRIS is the first step towards an uncooperative rendezvous in space. LIRIS is a technology demonstration for future non-cooperative rendezvous applications that will be demonstrated on the ATV-5 mission. 12) 13)
ESA contractors ADS (Airbus Defence and Space), with Sodern and Jena-Optronik, proposed using ATV-5 to demonstrate the new approach for future projects. The infrared camera has been provided by French company Sodern, with German-based Jena-Optronik supplying the lidar.
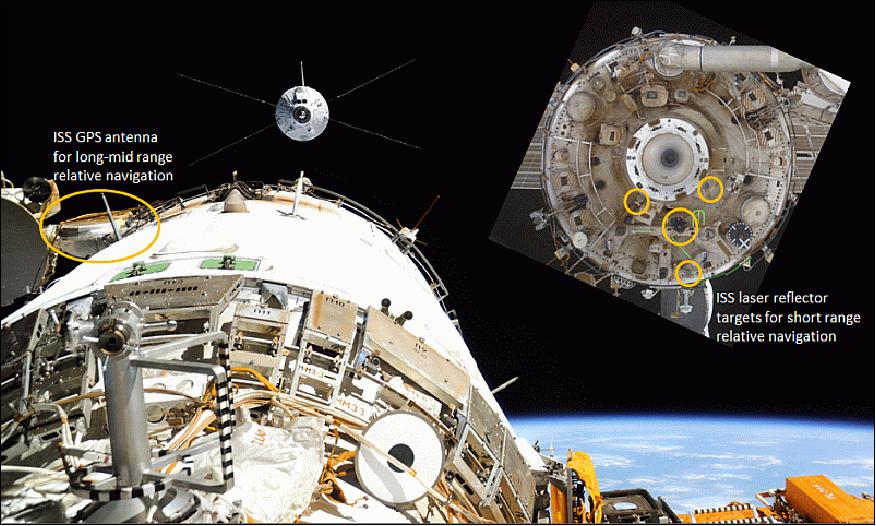
ATV navigation is based on cooperative rendezvous technology. At long range, relative GPS navigation is used, based on data from ATV's and the International Space Station's GPS receiver measurements. At short range, navigation uses optical sensors on ATV (videometers and telegoniometers) that bounce off a set of targets on the Space Station, the so called retro-reflectors.
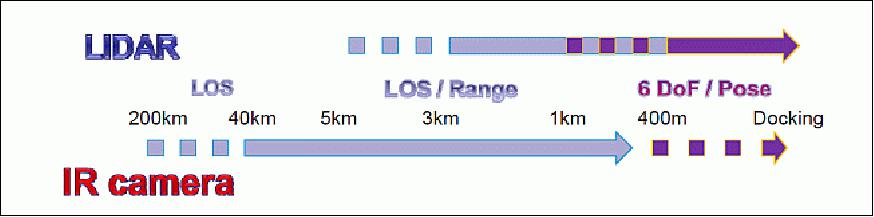
To develop non‐cooperative rendezvous technologies, new types of sensors, image processing and GNC (Guidance Navigation & Control) algorithms are being developed and tested. Previous ESA studies stressed the need for a rendezvous navigation based on image processing preferably coming from infrared cameras for long-range and lidar sensors for close range.
Airbus Defence and Space in collaboration with Sodern and Jena-Optronik proposed to use the last ATV flight to implement a demonstration that will increase technology readiness for non-cooperative rendezvous sensors and GNC. The LIRIS demonstrator is made of two parts, infrared and visible imaging provided by Sodern, and lidar sensing provided by Jena-Optronik. The demonstration will fly these new sensor technologies and evaluate their results compared to the traditional guidance Navigation & Control system on ATVs.


The advantage of the LIRIS approach is that it scans objects and gathers information about them without a dedicated communications link or hardware installed on the targets. The sensors can track targets equally well during darkness and provide detailed 3D maps of an object, increasing the autonomy of a craft and allowing it to navigate around a target. LIRIS-type systems are needed for future ventures deeper into space and to help remove large pieces of debris from Earth orbit.
Mission Status
• April 27, 2023: The International Space Station (ISS) partners have agreed to extend the operational period of the ISS. The United States, Japan, Canada and participant European Space Agency (ESA) countries will support operations until 2030, while Russia has committed to continuing station operations until 2028. 34)
• June 2017: Epilog to the LIRIS (Laser InfraRed Imaging Sensors) experiment. 14)
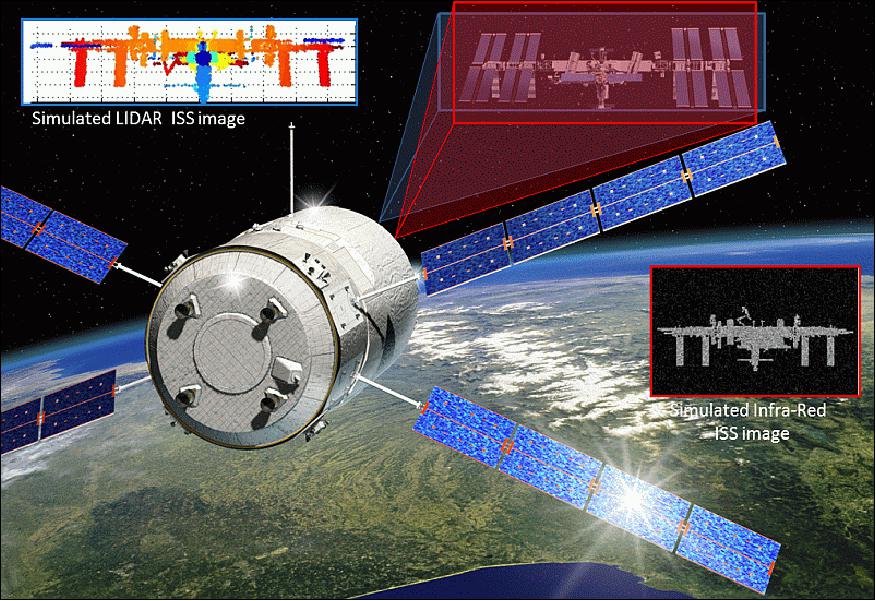
The LIRIS Demonstrator is an experiment of vision based navigation sensors implemented on ATV-5 George Lemaître and activated during the approach phase with the ISS (International Space Station). Studies of non-cooperative rendezvous stress the need for a GNC based on image processing using LIDAR sensors and cameras.
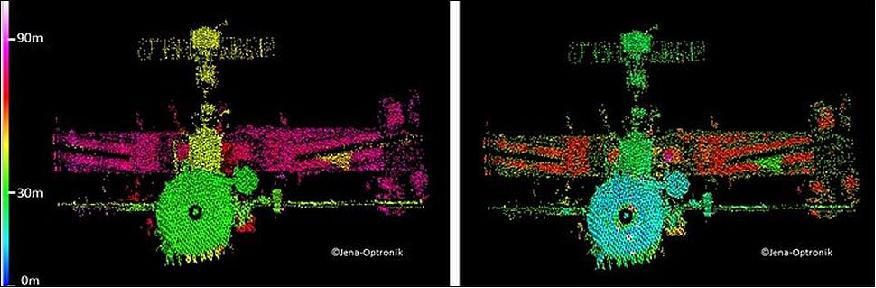
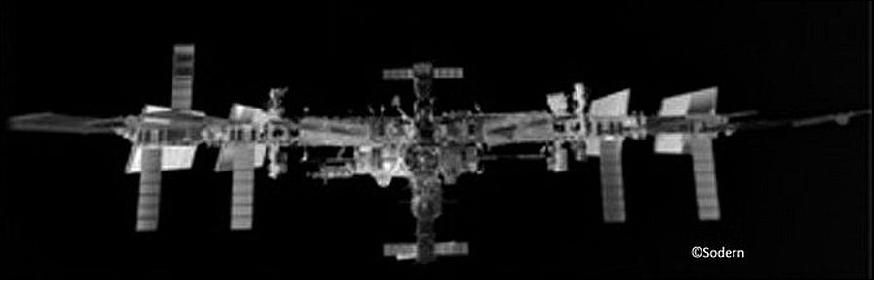
The LIRIS Demonstrator is composed of two flight phases during the ATV-5 flight. The ISS fly-under is from about 70 to 8.8 km and the rendezvous with ISS is from 3.5 to 0 km. The navigation sensors are composed of two infrared cameras, one monochrome visible camera and a scanning LIDAR. LIRIS is separated in two experiments: the LIRIS-1 experiment proposed by SODERN which concerns the use of infrared (IR) and visible (VIS) camera designed especially for non-cooperative rendezvous in space, and the LIRIS-2 experiment proposed by Jena Optronik and composed of a LIDAR Optical Head associated to an electronic which is interfaced with ATV and a recorder. This sensor provided full 3D scans of the approaching ISS between relative distances of 30 m down to docking and relative position measurements starting at approximately 2.5 km relative distances.
The LIRIS flight database collected all the data coming from the sensors, with time synchronized and associated with a reference trajectory processed from telemetry issued from ATV navigation. This database contains also information on the sensors, like position, orientation and calibration laws. Beside the cameras in visible and LWIR spectrum, the LIRIS-2 experiment concentrated on the acquisition of scanning LIDAR data (i.e. a relatively dense 3D point cloud of relative 3D point measurements between the scanning LIDAR and the ISS as a target object).
Scanning LIDAR and LIRIS-2 experiment: This scanning LIDAR was developed and integrated to the ATV-5 for the LIRIS-2 experiment by Jena-Optronik GmbH. This scanner was an early prototype of the next-generation scanning LIDAR for the relative measurement of non-cooperative targets. However, due to safety limitations in the context of approaching a manned space-craft, the scanning LIDAR was not operated at its highest power-level and thus only provided data at a reasonable density for the last 30 m. Furthermore, the field-of-view of the scanning LIDAR which is foreseen to be ranging between 1° x 1° and 40° x 40° degrees maximum was only controlled by a predefined timeline. Connected to this predefined field-of-view control also the scanning frequency and the scan-density varied according to a predefined scanning scheme.
In the LIRIS-2 experiment, the LIDAR was switched on at a relative distance of approximately 2.5 km. Because of the power level constraints the LIDAR only provided a set of single measurements and no dense 3D-scan. This changed from distances of 30 m and downwards. Also the scan duration changed with relative distances and varied between 120s for distances larger 300m, 16s for ranges between 100 m and 300 m, 4s for ranges between 100 m and 30 m, 1 Hz between 10 m and 30 m, and finally 3 Hz for ranges below 10 m. According to this, also the absolute number of scans varied with relative distance.
In conclusion, the LIRIS Demonstrator was a successful study for non-cooperative rendezvous in space. It enabled to acquire many data with LIDAR and cameras, and thus to confront IP algorithms to real space conditions. It enabled also to assess IP robustness and performances, even if this assessment has been a bit tricky, due to the too low accuracy of reference trajectory, especially at very close distance. To cope with this, the reference has been corrected by using LIDAR data, but calibration residuals are probably still present and perturb analysis of image processing results. The quantitative performance assessment of IP solutions has thus to be taken carefully.
For far and middle range rendezvous, the position and attitude estimation from camera tracking are correct, the LIDAR algorithms have lower performance for position estimation, mainly due to the few number of available scans. For close range rendezvous, the accuracy of pose estimation of all sensors increases. Many details can be resolved on sensors and the LIDAR scan mode was optimized to upgrade the resolution. Infrared cameras provide less accurate pose estimation than LIDAR and VIS, probably due to their lower resolution, blur in image at close distance and extrinsic calibration errors.
The LIRIS experiments have provided a unique set of data to increase validation and maturation of camera and LiDAR based navigation solutions. It makes us confident in their ability to be used as rendezvous sensors for future rendezvous missions, with uncollaborative or collaborative targets. LIRIS has also provided a useful feedback for future missions and experiments which should pay a special attention on sensor calibration and target 3D model reliability. Finally, LIRIS should be considered as a first step in rendezvous in-orbit demonstration, and more in-orbit experiments still need to be performed to complete present study and to improve visions based navigation performance assessment.
• Feb. 20, 2015: The prototype ‘blackbox for spacecraft' running inside ESA's cargo ferry as it burned up in the atmosphere, managed to return data to the ground but, sadly, the images it took were lost in transit. — The BUC (Break-Up Camera) was designed to record ATV's death throes in the infrared and transfer the results to the SatCom heatshield-protected sphere. Surviving the break-up, SatCom then broadcasts its stored data to Iridium telecom satellites as it plummets back to Earth. 15)
- The good news is that the team did indeed receive a message from the SatCom on the evening of Feb. 15, at 18:08 GMT, four minutes after ATV broke up. The message the project received contained information on the number of pictures taken – nearly 6000 – as well as accelerometer and magnetometer readings, details of the sphere rotation and a temperature reading. - Receipt of this message demonstrates that all systems worked correctly: the trigger logic guiding its operation was correctly implemented, the infrared camera worked and acquired images and then buffered thousands of them to SatCom.
- In turn, SatCom survived break-up, and then – after the closing of the four inhibits against early transmission – switched on its modem and contacted the telecom satellite constellation to send at least one message. To retrieve all the data, more messages would have been required, but – frustratingly – these have not arrived. The team is currently investigating why further data packets didn't make it through. This investigation may result in improvements, such as a backup data relay for future missions.
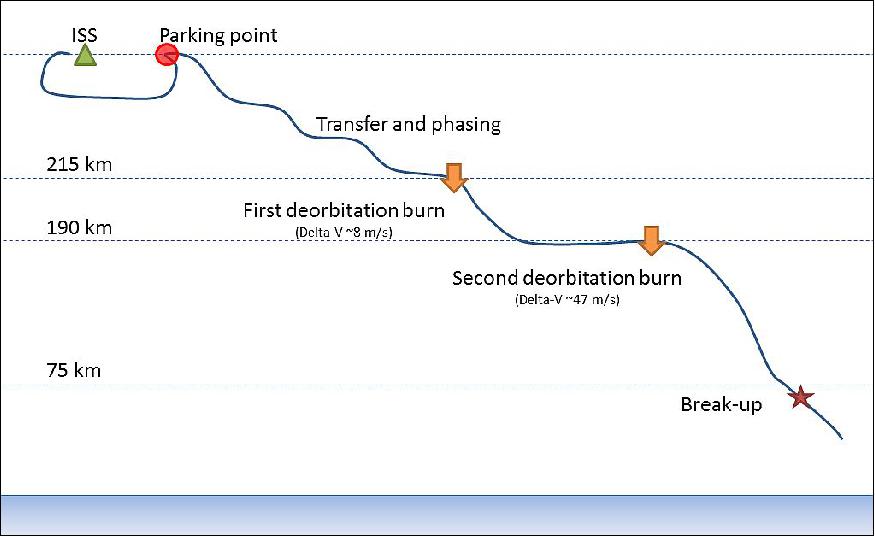
• ESA's ATV-5 undocked from the International Space Station's aft port of the Zvezda service module on Feb. 14, 2015 at 13:42 UTC, after more than 200 days in space – the longest period of any of the ATV spacecraft. 17) - On Feb. 15 at 18:04 UTC, the ATV-5 reentered Earth's atmosphere and burned up safely over an uninhabited area of the southern Pacific Ocean. 18)
- ATV-5 was filled with 2.5 tons of waste – dry refuse, waste water and equipment that is no longer needed . The controlled re-entry into the Earth's atmosphere is scheduled to take place the day after.
- The five successful ATV missions provided 31,500 kg of supplies and a total of 40 re-boosts to the ISS (this included orbit raising as well as evasion of space debris). The vehicles demonstrated European mastering of automated docking, a technology that is vital for further space exploration.
- With ATV-5, the success story of the most complex spacecraft ever developed and constructed in Europe, which began in 2008, comes to a close. But this technology will not burn up with the reentry of ATV ‘Georges Lemaître'. Instead, it will bring a multitude of new space projects to life. This success has only been possible thanks to the unparalleled European and international cooperation over the last two decades. This cooperation and the ATV's world leading technology will live on long into the future with the Orion program taking astronauts into Earth's orbit and beyond – a real testament to everyone who worked on this fantastic program. 19) 20)

• Feb. 10, 2015: ATV-5 was set to enter the atmosphere at the end of February in a new, shallow dive that would have allowed NASA and ESA teams to observe the spacecraft closely and learn from its reentry. — However, one of the four power chains failed last week, leading it to switch automatically over to its ‘failsafe' system. ATV is designed to continue its normal mission with one failure, and can still be controlled safely even with two. 21)
- The increased risk of a second failure in the 13 days of free flight before the 27 February reentry, and the impossibility of shortening this phase because of heavy Station traffic and other ATV operational constraints, has led ESA to cancel the shallow reentry.
- As a result, George Lemaître will follow the standard reentry profile around 30 hours after undocking, just like its predecessors.
- Two experiments are ready in ATV's cargo hold: both will monitor the temperature and record other information as it reenters in a controlled dive, transmitting recorded data to researchers.
- While this is the last of the ATV flights, the knowhow and technology that have gone into the series will soon fly again as early as 2017 to power NASA's Orion spacecraft with the European Service Module, paving the way for the next era in space exploration.
• Feb. 9, 2015: ESA astronaut Samantha Christoforetti installed a special infrared camera inside of ATV-5, called BUC (Break-Up Camera). The goal is to capture unique interior views of the spacecraft's break-up on reentry. The battery-powered camera will be trained on the Automated Transfer Vehicle's forward hatch, and will record the shifting temperatures of the scene before it. Recording at 10 frames per second, it should show the project the last 10 seconds or so of the ATV. The BUC device is flying for the first time on this mission, it will complement NASA's Reentry Break-up Recorder. 22)
- The reentry of this fifth and final ATV is something special. NASA and ESA are treating it as an opportunity to gather detailed information that will help future spacecraft reentries. Accordingly, ATV-5 will be steered into a shallow descent compared to the standard deorbit path. This ATV's fiery demise will be tracked with a battery of cameras and imagers, on the ground, in the air and even from the Station itself, and this time on the vehicle itself. ESA's camera will not survive the reentry, expected to occur some 80–70 km up, but it is linked to the ‘SatCom' sphere with a ceramic thermal protection system to endure the searing 1500°C. Once SatCom is falling free, it will transmit its stored data to any Iridium communication satellites in view.
- Plunging through the top of the atmosphere at around 7 km/s, it will itself be surrounded by scorching plasma known to block radio signals, but the hope is that its omnidirectional antenna will be able to exploit a gap in its trail. - If not, signalling will continue after the plasma has cleared – somewhere below 40 km altitude.
- Japan's i-Ball camera managed to gather images of its Station supply ferry breaking up in 2012. Another i-Ball was planned to fly with ATV-5, but was lost in the Antares rocket explosion in October 2014.
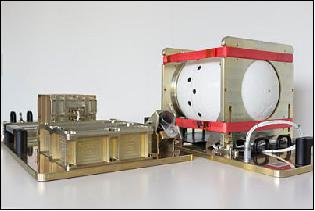
Legend to Figure 13: The BUC instrument on ATV-5 includes the SatCom device, to record infrared footage from the inside of the spacecraft's break-up as it reenters the atmosphere. The camera is bolted onto an ATV panel; the infrared lens can be seen at the center of the image. The approximately 10 seconds of footage gathered by the BUC will be transmitted to the spherical SatCom device, right, which is coated in a ceramic heatshield. SatCom will survive the spacecraft's break-up to transmit the imagery to an Iridium telecommunications satellite once it is in free space, falling to Earth.
The camera and capsule were built by Ruag in Switzerland, with thermal protection contributed by DLR (German Aerospace Center), software from Switzerland's ETH Zurich and the antenna and electronics from Switzerland's Viasat, with Denmark's GomSpace delivering the batteries.
• Feb. 6, 2015: The ATV-5 spacecraft is scheduled to depart the station on Feb. 14, 2015 (it will undock from the aft port of the Zvezda Service Module at 13:41 UTC). After it undocks, the Georges Lemaitre will move to a safe distance from the station where it will stay for 13 days until it is deorbited on Feb. 27, 2015. 24)
- The ATV-CC (Control Center) in Toulouse, operated by CNES, will command the undocking of an ATV for the last time as Georges Lemaître bids farewell to the Station after six months of being part of the weightless research laboratory.
• January 19, 2015: Three weeks before its undocking from the ISS, the ATV-5 Control Center in Toulouse is reporting that the unloading of water, fuel and air is either finished or almost. About 98% of the cargo unloading is finished; the remaining 2% refers to the reentry recorders that will document ATV-5's demise in February 2015. 25)
• Nov. 4, 2014: The ISS (International Space Station) was threatened by space debris last week, but ESA's ATV-5 (Automated Transfer Vehicle-5) saved the day by firing its thrusters to push the orbital outpost and its six occupants out of harm's way. This is the first time the Station's international partners have avoided space debris with such urgency.26)
- Europe's ATV-5 Georges Lemaître came in on 27 October when a piece of Russia's Cosmos-2251 satellite that broke up after colliding with another satellite in 2009 was on a collision course with the ISS. The object was around the size of a fist and calculations showed it would pass within 4 km – too close for comfort.
- Just six hours before potential impact, the five Space Station agencies agreed to an emergency maneuver. The ATV Control Center team in Toulouse, France, triggered a boost of 1.8 km/h, enough to raise the 420 ton Station by 1 km and out of harm's way.
• ATV-5 also prepared for its role in ISS Propulsive Support, first making a test reboost on August 14 ahead of the first regular reboost on August 27 that raised the Station's orbit by 1 km. 27)
• On August 15, 2014, the ATV-5 the ISS crew opened the vehicle's hatch to gain access to 6,561 kg of dry cargo delivered by the craft. Transfers of long-awaited cargo items got underway immediately and a number of notable payloads were already set up aboard ISS including the Electromagnetic Levitator, a high-profile science payload that will enable groundbreaking research in materials science and metallurgy to be conducted aboard the Station's Columbus module.
• On August 12, 2014, the ATV-5 completed docking with the ISS at 13:30 UTC on the Zvezda Aft docking port. 28) After berthing, ATV will be used as an extra living module by the astronauts and will remain available to reboost the Station, or push it out of the way of space debris if needed.
- Since launch on 29 July, ATV-5 has conducted a series of maneuvers to bring it up to the Station altitude, and these have gone flawlessly.
- Ahead of her arrival at the Station, ATV-5 was involved in an advanced sensor test. On 8 August, ATV-5 performed a ‘fly-under' of the Station, passing 7 km below to gather video footage with special cameras installed on its front cone. - This test is designed to improve the capability of spacecraft when dealing with "uncooperative" targets, such as orbiting debris or a Mars sample capsule. LIRIS (Laser InfraRed Imaging Sensors) was used to scan targets on the outside of the ISS, while onboard computers processed the data using new guidance navigation and control software. The results were recorded by hardware inside the pressurized element of the ship.

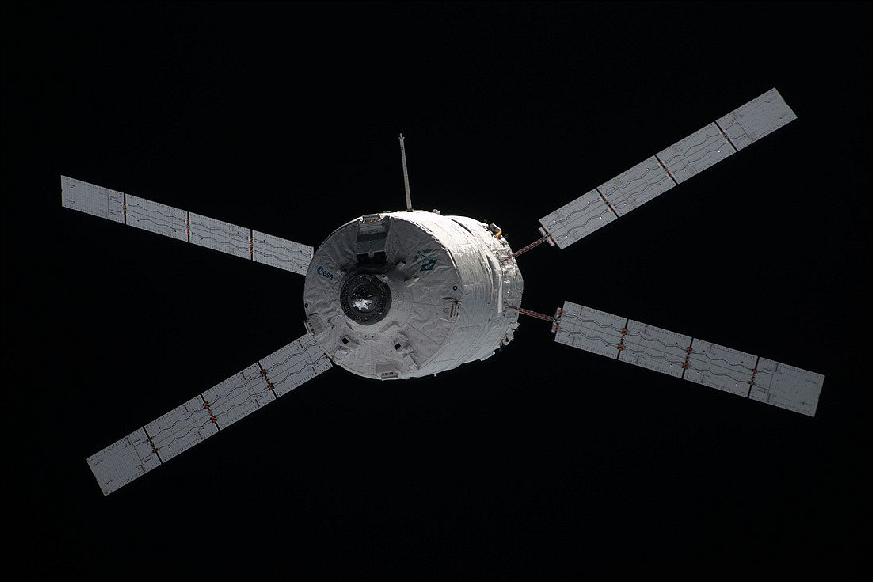
Legend to Figure 10: ESA's ATV-5 Georges Lemaître as seen from the International Space Station as it approaches for docking. To the right of the ESA logo (close to the left side of the ATV cylinder), three cameras around the front cone form part of the LIRIS (Laser Infrared Imaging Sensors experiment that demonstrated new rendezvous and docking technology. The lidar optical head and its box of electronics sit just above the ESA logo and form the second element of the tracking system.
During Georges Lemaître's rendezvous using its proven system, the LIRIS experiment was turned on some two and a half hours and 3500 m from the Space Station. All of the sensors worked as expected and a large amount of data was recorded and stored on hard disks in ATV's cargo hold. 31)
The disks were retrieved by ESA astronaut Alexander Gerst on 29 August and returned to Earth in Soyuz TMA-12M in September 2014. The information is now being compared against the results from ATV's normal navigation sensors.
With ATV-5 pointing directly at the Station, the LIRIS infrared cameras tracked the weightless research center perfectly despite several 30-minute periods in darkness when the Sun was eclipsed by Earth and traditional cameras would have gone blind.
Background of the ATV Program
As ESA's Automated Transfer Vehicle (ATV) reaches orbit for the fifth and last time, a new path beyond low Earth orbit is opening for Europe.
European industry, under ESA's leadership, had conducted concept and system studies for an automated supply spacecraft from 1987. In the early 1990s, ESA started joint studies with NASA, and then with the Russians, to define supply missions to the International Space Station.
Europe's formal approval for full development of an ATV (Automated Transfer Vehicle), came in 1995. With ATV, ESA gained the right to visit the Space Station with its own space transportation systems. Independent access to the orbital outpost is an important political and operational aspect. This spacecraft is Europe's way of contributing in kind towards its share of the operational costs of the Space Station.
Building Europe's most reliable and complex spacecraft has been a constant challenge. ESA and European industry teams have been working together to ensure ATVs were ready for the space endeavor. The program has built important engineering capabilities for orbital spacecraft, from extremely accurate autonomous docking to free-flight operations. 32)
Since its first voyage in 2008, the Automated Transfer Vehicle has played a vital role in International Space Station logistics: it serves as cargo carrier, ‘space tug' and storage facility. The multitasking spacecraft contributes to keeping the Station and its permanent crew of six working at full capacity.
• The maiden flight of ATV, Jules Verne with a launch on March 9. 2008 marked the first rendezvous and docking by a European spacecraft in a resupply mission to the International Space Station. Since then, continuous improvements have been made.
Following that first mission, post-flight analysis came up with 130 technical recommendations and about 30 of them were incorporated into the design of following ATVs. ATV teams repeat this exercise for every mission and agree on corrections and work-around solutions, making every spacecraft slightly different.
The challenge was to upgrade the spacecraft in every mission and yet deal with an ever-changing cargo manifest. Time adds extra pressure, pushing European production and integration chains to work at full capacity.
• The second ATV, Johannes Kepler, was the first production unit. The mission was the most difficult of the series. The project had to master the transition towards recurrent production, and it was also the first ATV fully loaded with a very challenging manifest. From a one-of-a-kind spacecraft, the ATV became a frequent flyer with a target launch rate of one per year. There is typically half a year from the end of a mission to the launch of the next ATV, and that leaves very little time to implement upgrades to the spacecraft.
A major advantage of this tight rhythm is that communication and efficiency within ATV teams increased exponentially. Engineers working on the hardware did not have to wait long to see it being launched into space. The nature of the ATV program allowed them to check results and look for possible solutions as they happened.
From electrical failures and a stuck communication antenna boom, to detached thermal blankets and fans that refused to work, each ATV had its own number of small flaws, but these did not jeopardize the missions.
• Made in Europe: It is no coincidence that ATVs are named after great European scientists and visionaries. The vessels carry their names to highlight Europe's deep roots in science, technology and culture.
Each spacecraft is the conclusion to a complex industrial cooperation that goes beyond agencies, companies and borders. A highly skilled workforce of ESA employees and European industry made the development of the advanced space systems and technology for ATV possible.
Airbus DS is the industrial prime contractor for the production of the vehicle. It manages more than 30 subcontractors and about 2000 people, and integrates all the subsystems coming from ten European countries. Arianespace, the world's first commercial space transportation company, specially developed the Ariane 5 ES launcher for ATV with a reignitable upper stage.
But ATV is not only a European endeavor: the project includes the cooperation of Russian companies, which have built the docking mechanism, the refuelling system and the associated electronics. A number of US companies are also involved with the video targets, lights and propulsion components.
• Team spirit: There is nothing like a constant challenge to build a strong team culture. People working on this European spacecraft are extremely committed to it, and most of them would not hesitate to declare it as the best part of their careers. A great sense of cooperation emanates from all the groups involved in the ATV project. Even with short turnarounds, team spirit opened the door to success for ATV missions.
ATV navigates, flies and docks with the Station automatically, but it does require some ground support. Throughout its mission, the spacecraft is monitored and commanded from the ATV Control Center in Toulouse, which works day and night in coordination with the other control centers in Russia and the USA. Every command is run in agreement with the Space Station partners.
Three space agencies with three different engineering cultures. The trilateral nature of this cooperation kept the teams open-minded. The ATV project allowed common approaches to be developed to design, build and control this complex space vehicle.
• ATV-5, Georges Lemaître, is the last cargo vehicle in the ATV series delivering critical equipment for science research. Experience with ATV Georges Lemaître could also help develop tools for a rendezvous with a non-cooperative object, such as space debris or an asteroid. The spacecraft will serve as a testbed for a suite of optical-sensor prototypes to home in on targets, based on a long-range infrared camera and a short-range 3D imaging sensor.
At the end of the ATV-5 mission, the vehicle will undock from the Space Station filled with a few tonnes of wastewater, materials and equipment. ATV Georges Lemaître will depart with a final gesture before its mission ends. Its ‘big dive' will differ from past ATV missions, in that its engines will deorbit the spacecraft on a shallower flight path. This reentry angle will help plan for the Space Station's eventual end of life. While this date is still unknown and some way into the future, engineers are already looking at reentry strategies for the Station.
ATV's ‘swan song' will be in the spotlight on a moonless night. A camera on the Station will track ATV from above its reentry path. Together with the three onboard experiments and ground-based telescopes also observing ATV's reentry, this will be the most-recorded mission end for a European spacecraft.
ATV-1, | Launch: 09.03.2008 | First automated docking | 6 reboots | Total cargo: 4575 kg |
ATV-2, | Launch: 16.02.2011 | Largest boost since the | 5 reboots | Total cargo: 7100 kg |
ATV-3 | Launch: 23.03.2012 | Longest attached phase to | 9 reboots; Pump to recycle urine into drinkable water | Total cargo: 6595 kg |
ATV-4 | Launch: 05.06.2013 | Docked to the Space | 6 reboots | Total cargo: 6590 kg |
ATV-5 | Launch: 25.07.2014 | Heaviest spacecraft ever | Includes piece of meteorite ‘Field of the Sky', | Total cargo:6555 kg |
Mission Authorities of the ATV Missions
The first important step for this trilateral cooperation was to define roles and responsibilities of the the control centers. ATV was the first mission to have 3 control centers simultaneously and actively involved in operations. To be able to handle this trilateral setup, it was vital that the responsibilities were clearly established and divided between the control centers. 33)
• MCC_H (Mission Control Center in Houston): Houston is the ISS Prime Mission Authority. This means that MCC-H organized and supervised the process of the integrated ATV-ISS operations. They were also responsible for all dry cargo transfer operations, water and gas deliveries.
• MCC-M (Mission Control Center in Moscow): Moscow was the Mission Authority for the ATV operations such as: Rendezvous and Docking, Refuelling, Reboost maneuvers, Attitude control, Water and Gas transfer, Undocking and departure. MCC-M provided the Go/No-Go decisions to authorize the next mission operations step.
• ATV-CC (ATV Control Center in Toulouse): Toulouse had the Execution authority for ATV operations. ATV-CC controlled and monitored ATV and the execution of the automated sequences. When in proximity or attached to the ISS, ATV readiness was checked by the Flight Control Team as per Joint Flight Rules and reported by the ATV Flight Director to MCC-M.
On behalf of ESA, the ATV was operated from the ATV-CC by CNES (Centre National dEtudes Spatiales) in CST (Toulouse Space Center), France. ATV-CC was also interconnected to: (1) launch site in Kourou, French Guiana for pre launch activities, (2) Artemis CC in Redu, Belgium, (3) Columbus Control Center in Munich, Germany, (4) ISS Mission Control Center in Houston, USA (MCC-H) and (5) ISS Mission Control Center in Moscow, Russia (MCC-M).
ATV Heritage
The duration, assigned resources and technical complexity of the ATV program have no equal in the history of European spaceflight. Lessons learned from building and operating the spacecraft have delivered enormous know how. ESA is pursuing the exploitation of this expertise and technology for future spaceflight applications.
U.S. companies have already benefited from ATV heritage, bringing extra business to European industry. The Cygnus spacecraft, for example, a commercial spacecraft built by OSC (Orbital Sciences Corporation), have used ATV equipment for its missions to the Space Station.
ATV was designed to be flexible, so that it could be the basis for developing a wide variety of new space vehicles. ATV technologies could be used for other automated missions, such as controlling space debris or servicing other spacecraft in orbit. Concepts for ATV evolution had included an unmanned free-flying laboratory, and even a space tug carrying supplies to lunar and martian orbits.
But with the ATV series coming to an end, ESA had to decide between building a sixth spacecraft and developing something new. The decision was the forward-looking choice: ESA started discussing options with NASA about building a new spacecraft together.
European Service Module on NASA's Orion Spacecraft
ATV will have a second life after completing its resupply role for the International Space Station – a European module will power NASA's Orion spacecraft for Moon missions and beyond. This will be the first collaboration between ESA and NASA on a crew transportation vehicle that will ultimately carry astronauts farther into space than ever before.
The Service Module will be heavily based on ATV technology. The official name of Orion is MPCV (Multi-Purpose Crew Vehicle), because the spacecraft can be used to complete different missions. If everything goes according to plan, the spacecraft will transport up to four astronauts into space and bring them safely back to Earth. Orion will be able to fly to the Moon, and is aimed at visiting an asteroid in the next decade.
The European Service Module will fly on Exploration Mission-1, the first flight of the completed Orion spacecraft. This mission will be an unmanned lunar flyby, returning to Earth's atmosphere at 11 km/s – the fastest reentry ever. The flight is set to take place by the end of this decade.
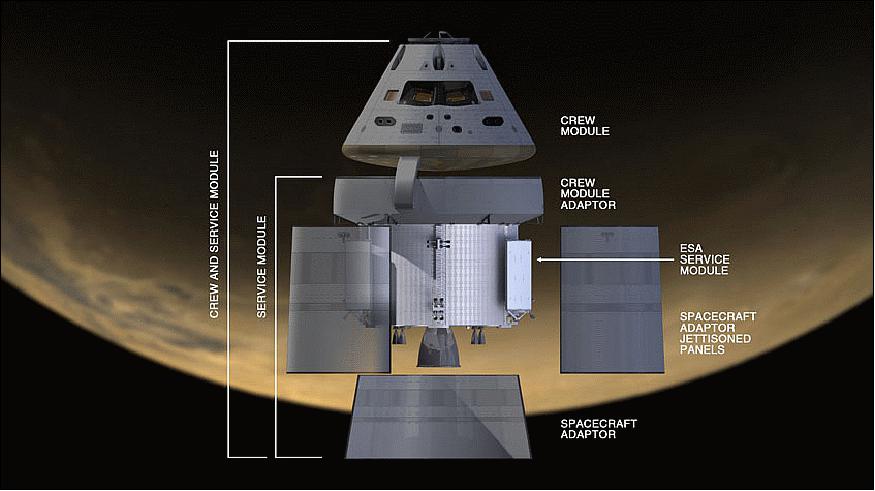
Orion is a new-generation spacecraft with demanding functional requirements. The European Service Module will be located directly under its crew module and will feature ATV-derived technologies to provide propulsion and power to the spacecraft as well as oxygen, nitrogen and water for the astronaut crew.
The Service Module will house Orion's main engine, thrusters and fuel needed for orbital transfers, attitude control and high-altitude ascent aborts. All those basic functions and several other components are the same as used on ATV. Extending from the main body of the spacecraft will be ATV's characteristic X-shaped solar wings (Figure 18).
This is the first time ESA cooperates in such a critical part of a NASA spacecraft. The entire development will take place in Europe after which US engineers will take care of integrating the European Service Module with Orion.
The main design and the expertise gained throughout a decade of ATV development will be reused for the Orion spacecraft. ESA is implementing new techniques to redefine and qualify the Service Module, and will give support during the missions in case of anomalies.
Providing the Service Module for Orion will be ESA's remaining in-kind contribution to the Space Station partnership. The plan allows European industry to capitalize on ATV technology while significantly cutting research and production costs for NASA. At the same time, the project will create highly skilled jobs for Europeans in an innovative sector ensuring future space endeavors and could see European astronauts flying beyond Earth orbit.

References
1) "Over 13 billion years after the Big Bang, Georges Lemaître heads to space," ESA, March 20, 2014, URL: http://blogs.esa.int/atv/
2) Fifth ATV Named after Georges Lemaître," ESA, Feb. 16, 2012, URL: http://www.esa.int/Our_Activities/Human_Spaceflight
/ATV/Fifth_ATV_named_after_Georges_Lemaitre
3) "ATV-5 integration," ESA, March 17, 2014, URL: http://www.esa.int/spaceinimages
/Images/2014/03/ATV-5_integration
4) "ATV-5 "Georges Lemaître" leaves Astrium's Bremen site for European spaceport in Kourou," Astrium, Oct. 7, 2013, URL: https://web.archive.org/web/20161217155752/http://www.space-airbusds.com/en/press_centre/airbus-defence-and-space-atv-5-georges-lemaitre-en-route-to-kourou.html
5) "Our week through the lens," ESA, March 17-21, 2014, URL: http://www.esa.int/Highlights
/Week_In_Images_17_21_March_2014
6) "ATV Integrated Cargo Carrier," ESA, URL: http://www.esa.int/Our_Activities/Human_Spaceflight
/ATV/ATV_Integrated_Cargo_Carrier
7) "Last ATV lifts off to supply the Space Station," ESA, July 29, 2014, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/ATV
/Last_ATV_lifts_off_to_supply_the_Space_Station
8) "Airbus Defence and Space prepares launch of ATV-5 Georges Lemaitre," Space Travel, July 18, 2014, URL: http://www.space-travel.com/reports/Airbus_Defence_
and_Space_prepares_launch_of_ATV_5_Georges_Lemaitre_999.html
9) ESA brochure, URL: http://esamultimedia.esa.int/multimedia/publications/ATV_brochure_EN/offline/download.pdf
10) "ATV completes final automated docking," ESA, Aug. 12, 2014, URL: http://www.esa.int/Our_Activities/Human_Spaceflight
/ATV_completes_final_automated_docking
11) "Touchy-freely joystick heading to Space Station," ESA, Feb. 26, 2014, URL: http://www.esa.int/Our_Activities/Space_Engineering
/Touchy-feely_joystick_heading_to_Space_Station
12) "LIRIS: Laser Infra-Red Imaging Sensors demonstrator on ATV-5," ESA, March 19, 2014, URL: http://blogs.esa.int/atv/2014/03/19/liris-laser-
infra-red-imaging-sensors-demonstrator-on-atv-5/
13) "ATV-5 set to test new rendezvous sensors," ESA, March 18, 2014, URL: http://www.esa.int/Our_Activities/Human_Spaceflight
/ATV/ATV-5_set_to_test_new_rendezvous_sensors
14) A. Masson, C. Haskamp, I. Ahrns, R. Brochard, P. Duteis, K. Kanani, R. Delage, "Airbus DS vision based navigation solutions tested on LIRIS experiment data," Proceedings of the 7th European Conference on Space Debris, ESA/ESOC, Darmstadt/Germany, 18 - 21 April 2017, published by the ESA Space Debris Office,SDC7 2017, paper 481, ADR-4 URL: https://conference.sdo.esoc.esa.int/proceedings/list
15) ATV's internal camera delivered data, but not images," ESA, Feb. 20, 2015, URL: http://www.esa.int/Our_Activities/Space_Engineering_Technology
/ATV_s_internal_camera_delivered_data_but_not_images
16) Rémi Lapeyre, Valérie Mousset, Sébastien Fourest, "ATV-5 deorbitation operations using a shallow trajectory : an example of adaptive operations," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-12-B6.3.11
17) "Europe's ATV-5 Leaves Station," NASA, Feb. 14, 2015, URL: https://blogs.nasa.gov/spacestation/
2015/02/14/europes-atv-5-leaves-station/
18) "Last ATV reentry leaves legacy for future space exploration," ESA, Feb. 15, 2015, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/ATV
/Last_ATV_reentry_leaves_legacy_for_future_space_exploration
19) "ATV-5 successfully de-docks for final part of mission," Airbus Defence and Space, Press Release, Feb. 14, 2015, URL: http://airbusdefenceandspace.com/atv-5-
successfully-de-docks-for-final-part-of-mission/
20) "ATV-CC Information package," CNES, URL: http://www.cnes-multimedia.fr
/atv/atv5/atv5_info_va.pdf
21) "ATV to bid farewell to Space Station for last time," ESA, Feb. 10, 2015, URL: http://www.esa.int/Our_Activities/Human_Spaceflight
/ATV/ATV_to_bid_farewell_to_Space_Station_for_last_time
22) "Camera to record doomed ATV's disintegration - from inside," ESA, Feb. 6, 2015, URL: http://www.esa.int/Our_Activities/Space_Engineering
_Technology/Camera_to_record_doomed_ATV_s_disintegration_from_inside
23) "BUC Infrared Camera and SatCom," ESA, July 14, 2014, URL: http://www.esa.int/spaceinimages/Images
/2014/07/BUC_Infrared_Camera_and_SatCom
24) Rachel Kraft, Dan Huot, "NASA TV Coverage Set For Partner Space Station Cargo Spacecraft Activities," NASA, Feb. 6, 2015, URL: http://www.nasa.gov/press/2015/february/nasa-tv-coverage
-set-for-partner-space-station-cargo-spacecraft-activities/
25) "ATV-5 mission report #37," ESA, Jan. 19, 2015, URL: http://blogs.esa.int/atv/2015/
01/19/atv-5-mission-report-37/
26) "Europe's Space Ferry Moves Space Station to avoid Space Debris," ESA, Nov. 4, 2014, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/ATV/
Europe_s_space_ferry_moves_Space_Station_to_avoid_space_debris
27) Patrick Blau, "ATV-5 completes Propellant Transfers to Space Station." Spaceflight 101, Oct. 1, 2014, URL: http://www.spaceflight101.com
/atv-5-mission-updates.html
28) http://blogs.esa.int/atv/2014/08/12
/iss-crew-photos-of-atv-5-docked/
29) "LIRIS lidar," ESA, image released on Dec. 9, 2014, URL: http://www.esa.int/spaceinimages
/Images/2014/12/LIRIS_lidar
30) "LIRIS infrared," ESA released this image on Dec. 9, 2014, URL: http://www.esa.int/spaceinimages
/Images/2014/12/LIRIS_infrared
31) "ATV views Space Station as never before," ESA, Dec. 9, 2014, URL: http://www.esa.int/Our_Activities/Human_Spaceflight
/ATV/ATV_views_Space_Station_as_never_before
32) Nadjejda Vicente, "A story of European success and cooperation," ESA Bulletin, No 158, May 2014, pp: 27-37, URL: http://www.esa.int/About_Us/ESA_Publications/ESA_Bulletin_158_May_2014
33) Muro Augelli, "Operations of the European Automated Transfer Vehicle: a history of trilateral cooperation," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B3.4-B6.5.1
34)Garcia, Mark. “Partners Extend International Space Station for Benefit of Humanity – Space Station.” NASA Blogs, 27 April 2023, https://blogs.nasa.gov/spacestation/2023/04/27/partners-extend-international-space-station-for-benefit-of-humanity/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Launch Experiments Mission Status Background References Back to top