Jugnu Nanosatellite
Non-EO
Mission complete
ISRO
Education
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ISRO |
| Mission status | Mission complete |
| Launch date | 12 Oct 2011 |
| End of life date | 12 Oct 2012 |
Jugnu Nanosatellite
Jugnu, the Hindi word for firefly, is an Indian nanosatellite designed and developed by students of the Indian Institute of Technology (IIT), Kanpur. The project started in 2008 with a team of 3 students. In the meantime, the team has grown to the size of more than 45 students ranging from 2nd year undergraduates to final year postgraduates and 14 professors from different disciplines. Advice was also provided by ISRO scientists as well as ISRO funding of the project. 1) 2) 3) 4)
The primary mission goals are:
• To get students involved in research activities based on affordable MEMS technologies
• To test new solutions for the future cost effective space missions
• To set the path for future up gradations and study such validation concepts for possible up gradations.
The mission goal is to develop a nanosatellite at IIT Kanpur that would serve the following applications:
• A micro imaging system
• GPS receiver for locating the position of satellite in the orbit
• MEMS based IMU (Inertial Measurement Unit).
An operational lifetime of 1 year of the Jugnu mission is expected.
Spacecraft
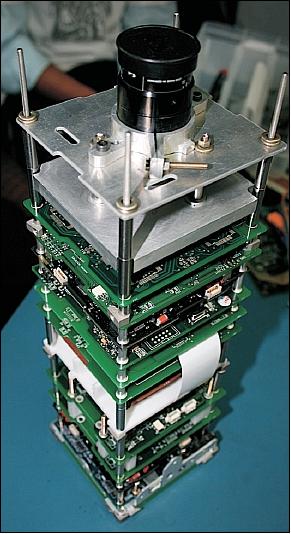
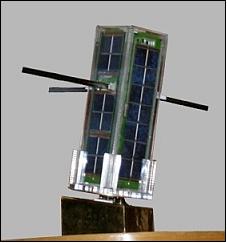
The spacecraft corresponds to a standard 3U CubeSat with a size of 10 cm x 10 cm 32 cm and a mass of ~ 3 kg. The satellite design is mostly indigenous. For the most part, non space grade, COTS (Commercial-off-the-Shelf) components are used to keep the cost low. Unlike conventional satellites which have a large number of redundant systems, Jugnu has minimal redundancies at component level. Some redundancy is maintained at the functional level and efforts were made to achieve a single point failure tolerant design for the nanosatellite. 5)
The satellite comprises nine subsystems six for housekeeping: ADCS (Attitude Determination and Control Subsystem), Communication Subsystem, OBC (On Board Computer), EPS (Electrical Power Subsystem), Structure and TCS (Thermal Control System) and three payloads: (GPS, NIR imager, and IMU).
The spacecraft is 3-axis stabilized. The ADCS is comprised of a 3-axis magnetometer and 3-axis MEMS gyros for attitude sensing; actuation is provided by reaction wheels and magnetorquers. The ADCS orients the satellite in a manner such that maximum solar energy is incident on solar panels. During imaging, the satellite has to point into the target area in order for image capture. From a communication point of view, control of the attitude is necessary so that the antennas, which have narrow beams, are pointed correctly towards the ground station.
OBC: The OBC provides all data handling functions of the spacecraft. The subsystem features two independent microprocessors, a low-power 16 bit MCU from Texas Instruments, and a more powerful ARM7TDMI based microcontroller from Atmel.
EPS (Electrical Power Subsystem): Use of triple junction solar cells with an efficiency of 27%. An average power of 3.8 W is provided.
TCS (Thermal Control Subsystem): The TCS of JUGNU is passive with MLI (Multi-Layered Insulation) sheets, OSR (Optical Solar Reflector) and surface coatings as key components. It also has IC and thermocouple based sensors to provide for the feedback and maintain the health of sensitive IC’s and the camera.
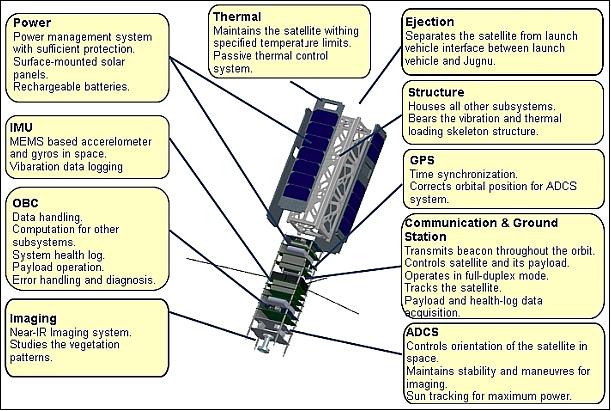
RF communications: The nanosatellite uses the VHF band in uplink (145.980 MHz), the data rate is 600 bit/s, FSK modulation. The downlink is in UHF band (437.505 MHz) with a data rate of 2.4 kbit/s FSK modulation. In addition, a CW beacon is used (437.275 MHz). Operation in full duplex mode.
Launch
The Jugnu nanosatellite was launched on October 12, 2011 as a secondary payload on the ISRO PSLV launcher (PSLV-C18) from SDSC-SHAR (Sriharikota), India. The primary payload on this flight was Megha-Tropiques of ISRO. 6)
Secondary payloads on the flight were:
• SRMSat, a nanosatellite (10.9 kg) of SRM (Sri Ramaswamy Memorial) University, Chennai, India.
• Jugnu (the Hindu word for firefly), is a nanosatellite (3 kg) of the Indian Institute of Technology (IIT), Kanpur. 7)
• VesselSat-1, a microsatellite (29 kg) of LuxSpace, Luxembourg (a company of OHB Technology AG). VesselSat-1 carries an AIS (Automatic Identification System) payload for the detection of ships in the ground segment. Orbcomm is the exclusive licensee for the AIS data collected by VesselSat-1. 8)
Orbit: Circular orbit, altitude = 860 km, inclination = 19.96º, period ~ 102 minutes (~14 rev./day).
An indigenously built separation (ejection system), designed to release Jugnu, was developed by IIT students.
Mission Status
• The Jugnu nanosatellite is operating nominally in early 2012.
Sensor Complement (GPS, NIR Imager, IMU)
GPS Receiver
A 12-channel GPS receiver provides time synchronization for all subsystems and determines the orbital position for ADCS. The location accuracy is ~ 20 m.
NIR Imager (Near Infrared Imager)
The objective of the NEAR Imager is to capture near IR images (750-850 nm) of Earth’s surface. The instrument consists of an in-house developed camera, an external storage, and an interface between the two through the OBC (which is also used for carrying out the function of image compression/processing).
The camera captures the image (resolution : 640 x 480 pixels, 10 bit/pixel), which is then transferred to an external memory by the OBC. The image is then processed (if required) and transmitted to the ground station. An spatial resolution of about 197 m x 197 m per pixel is expected on Earth’s surface. The total area of view, on Earth’s surface is expected to be around 103 km x 77 km. The camera has a focal length of 35 mm.
Onboard data storage is provided by a triple redundancy modular memory with a capacity of 2 GB.
IMU (Inertial Measurement Unit)
The objective of the IMU device is to measure vibrations in the satellite and angular rate of the satellite. Possible applications of this payload are:
• To test the performance of the MEMS based sensors in space
• To provide position and orientation data to the OBC.
Ground Segment
The Ground Station for control and monitoring of the satellite has been set up at IIT Kanpur. Use of Yagi-Uda antenna in uplink and downlink. The telemetry data (for health monitoring) collected for all the subsystems at ground station will validate the performance of the sensors and the miniaturized technology in the satellite subsystems. Experiments related to payloads - GPS, Imaging and IMU will demonstrate the performance of the hardware and algorithms used in their design. Images collected will also be useful in studying the vegetation and the water bodies. Other image related applications are also being envisaged.
References
1) https://web.archive.org/web/20121126032238/http://www.iitk.ac.in/me/jugnu/subsystems.htm
2) “Jugnu - IIT Kanpur Nanosatellite,” Brochure, URL: https://www.iitk.ac.in/olddord/jugnu_brochure.pdf
3) https://web.archive.org/web/20110121072340/http://www.iitk.ac.in/me/jugnu/index.htm
4) http://indianspacestation.com/student-initiative/70-jungu-studen-satellite-initiative.html
5) “Technical details of Jugnu,” URL: https://www.scribd.com/doc/151890579/Brief-Write-Up-on-Jugnu
6) http://www.isro.org/pslv-c18/pdf/pslv-c18-brochure.pdf
7) https://web.archive.org/web/20130429115607/http://rhour.com/jugnu-satellite/
8) “ORBCOMM Announces Launch of AIS-Enabled Satellite,” Space Daily, Oct. 14, 2011, URL: http://www.spacedaily.com/reports/ORBCOMM_Announces_Launch_of_AIS_Enabled_Satellite_999.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).