LRO (Lunar Reconnaissance Orbiter)
Non-EO
NASA
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
| Launch date | 18 Jun 2009 |
LRO (Lunar Reconnaissance Orbiter) + LCROSS
LRO is a NASA mission to the moon within the Lunar Precursor and Robotic Program (LPRP) in preparation for future manned missions to the moon and beyond (Mars). LRO is the first mission of NASA's `New Vision for Space Exploration', which President Bush announced on January 14, 2004, in sending more robot and human explorers beyond Earth orbit. The LRO requirements call for a mission life of one year in lunar orbit. The objectives of LRO are to: 1) 2) 3) 4) 5)
• Identify potential lunar resources
• Gather detailed maps of the lunar surface
• Collect data on the moon's radiation levels
• Study the moons polar regions for resources that could be used in future manned missions or robotic sample return missions
• Provide measurements to characterize future robotic explorers, human lunar landing sites and to derive measurements that can be used directly in support of future Lunar Human Exploration Systems.
The orbiter project is managed by NASA/GSFC while NASA/ARC manages the LRO payload. The CDR (Critical Design Review) of LRO was completed in Nov. 2006.
Spacecraft
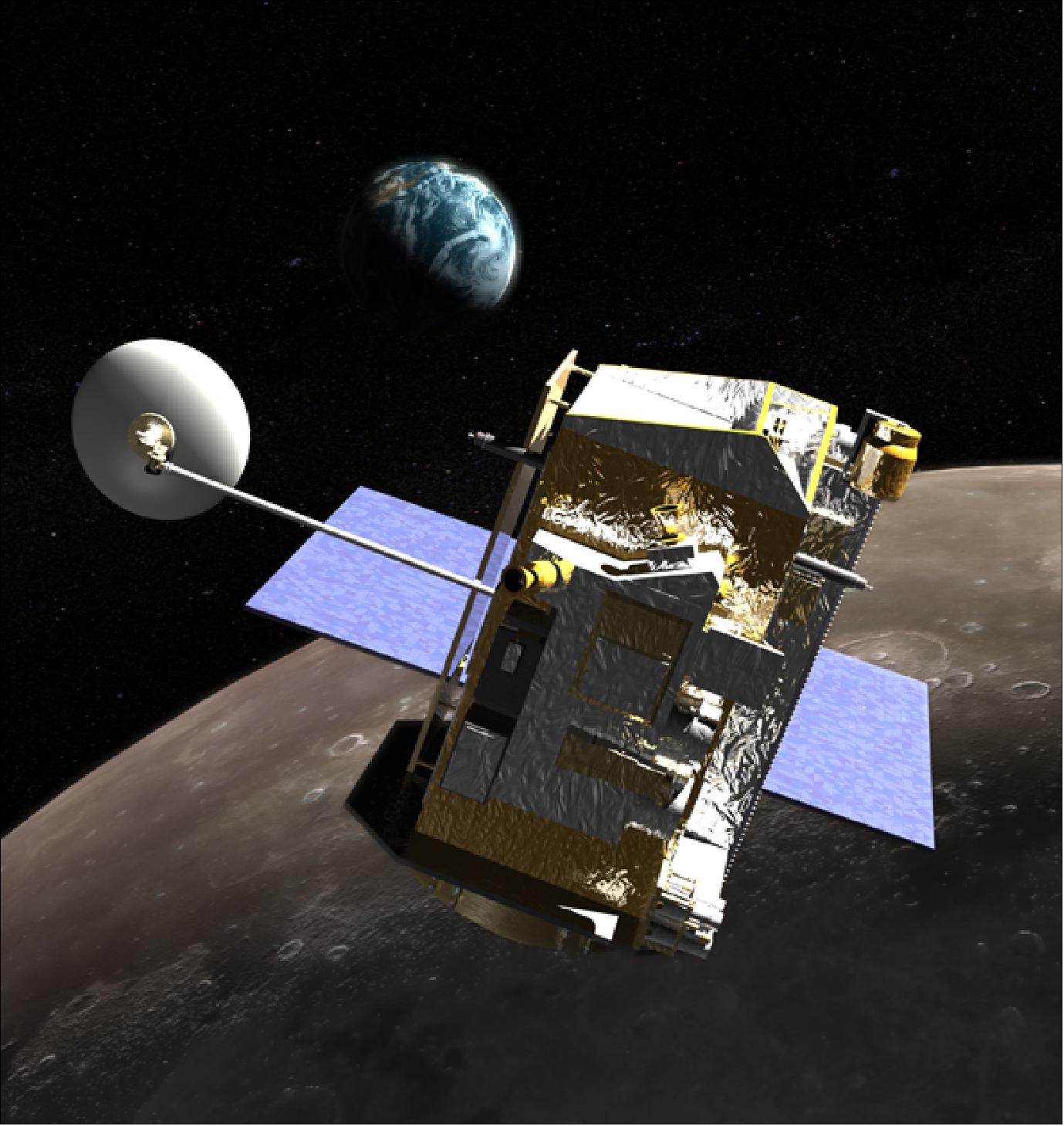
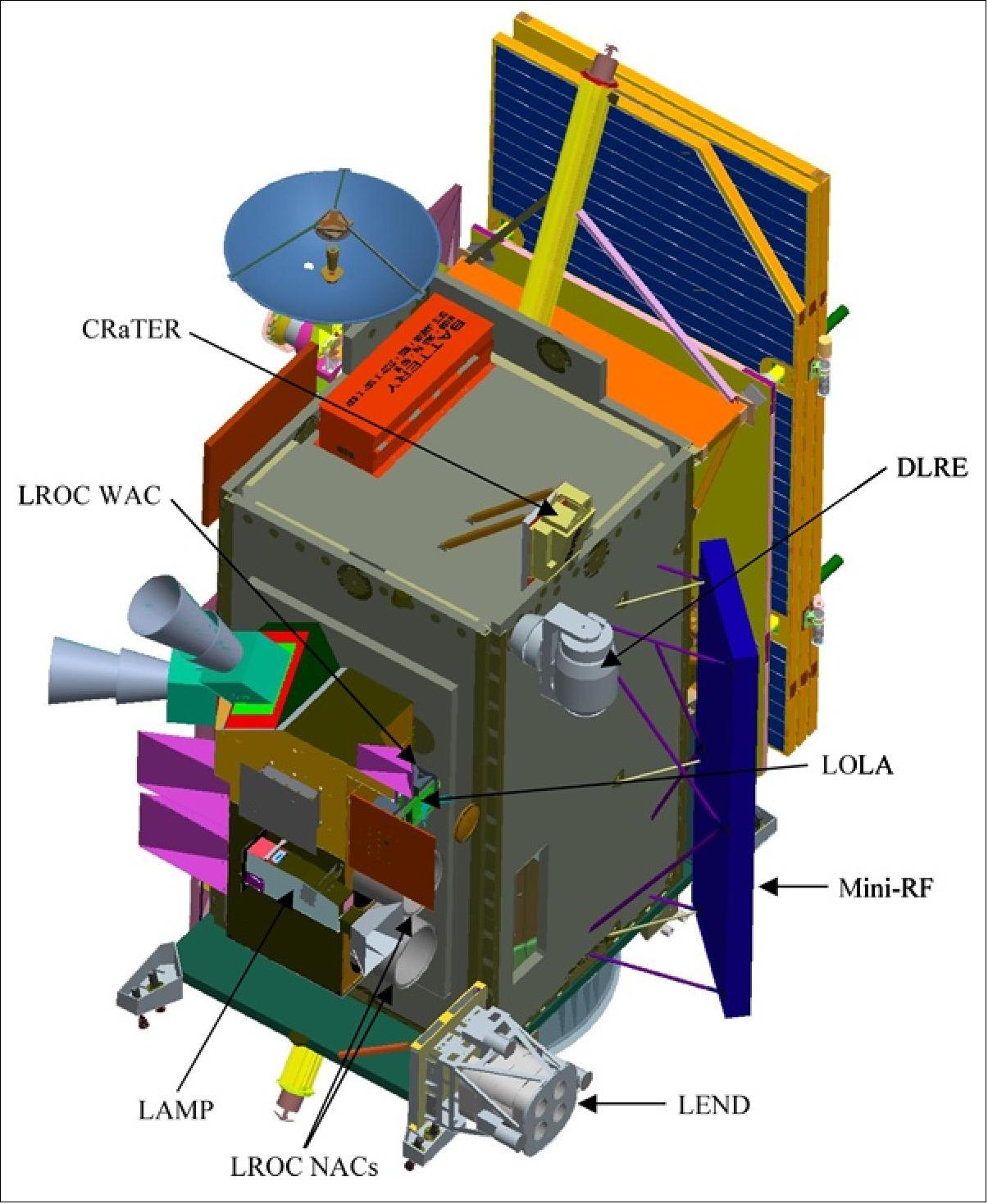
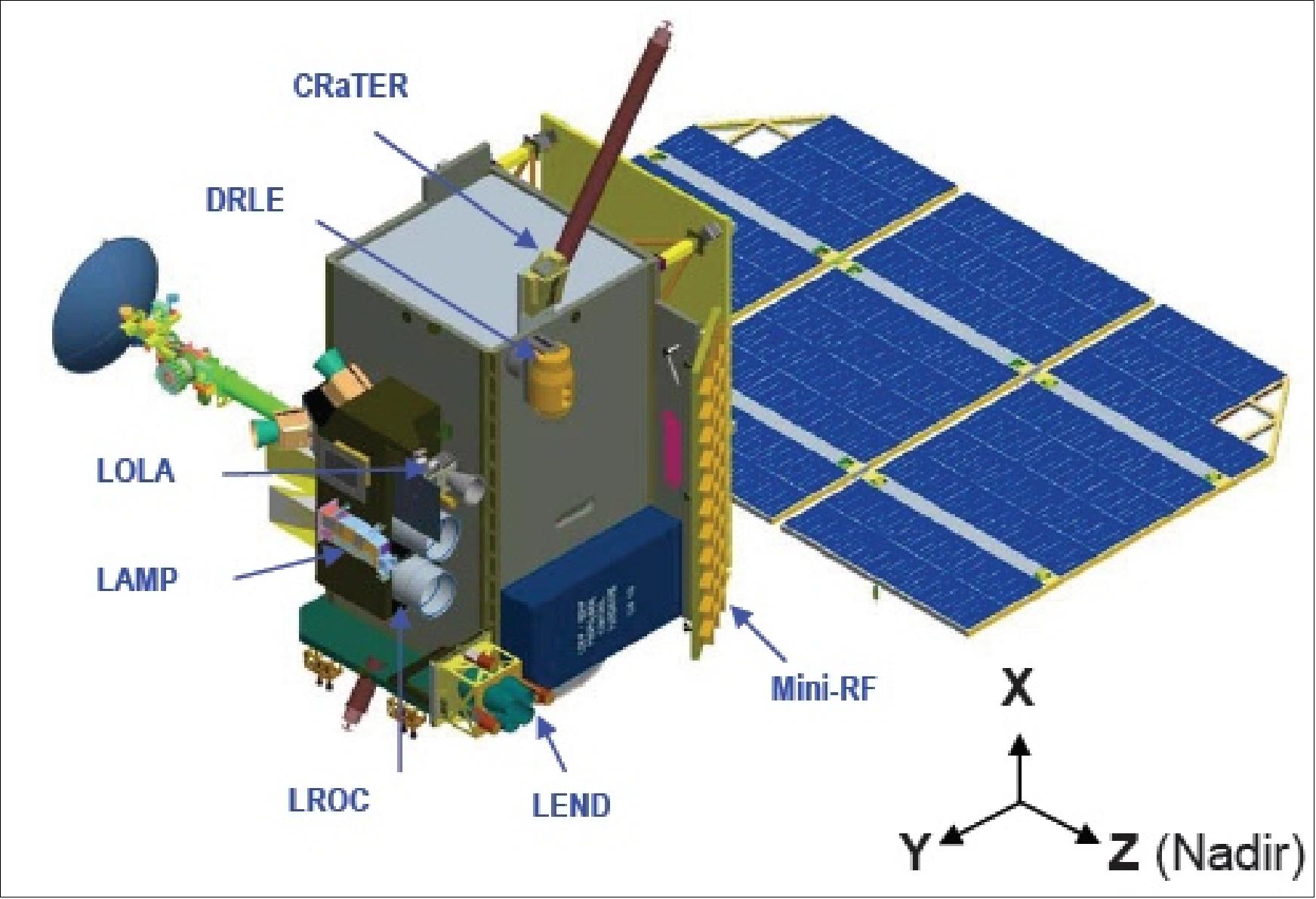
The spacecraft is being built and integrated at NASA/GSFC (inhouse development), Greenbelt, MD. The spacecraft architecture emphasizes modularity through the use of standard interfaces. LRO is a 3-axis stabilized, nadir pointed spacecraft designed to operate continuously during the primary mission.
The ACS (Attitude Control Subsystem) consists of the following components: 10 CSS (Coarse Sun Sensors), 4 RW (Reaction Wheels), 2 A-STR (Autonomous Star Trackers), and a RLG (Ring Laser Gyroscope) of Honeywell, referred to as MIMU (Miniature Inertial Measurement Unit). MIMU provides attitude rate information up to 18 º/s and attitude rate polarity from 18º/s up to 60 rpm. The reaction wheels are specifically designed to provide very quiet, smooth changes in pointing of the spacecraft. Once in observing mode, the reaction wheels keep the boresight of the instruments pointing continuously at the surface of the moon. The 2 A-STR, built by SELEX Galileo, provide a spacecraft attitude quaternion in the J2000 ECI (Earth Centered Inertial) reference frame.
The ACS hardware is controlled by ACS flight software (FSW) resident on the SBC (Single Board Computer). This software also includes some FDC (Failure Detection and Correction) algorithms used in safing. Part of the ACS FSW function is to provide commands to the SA (Solar Array) and the HGA (High Gain Antenna). Attitude and momentum control functions are performed in ACS control modes that process sensor data and generate appropriate actuator commands. 6) 7)
EPS (Electric Power Subsystem): The EPS is comprised of an articulated solar array (1 wing, 2-axis tracking), a Li-ion battery of ABSL (UK), and a DET system (21-35 V). Battery mass of 35 kg, and a capacity of 126 Ah.
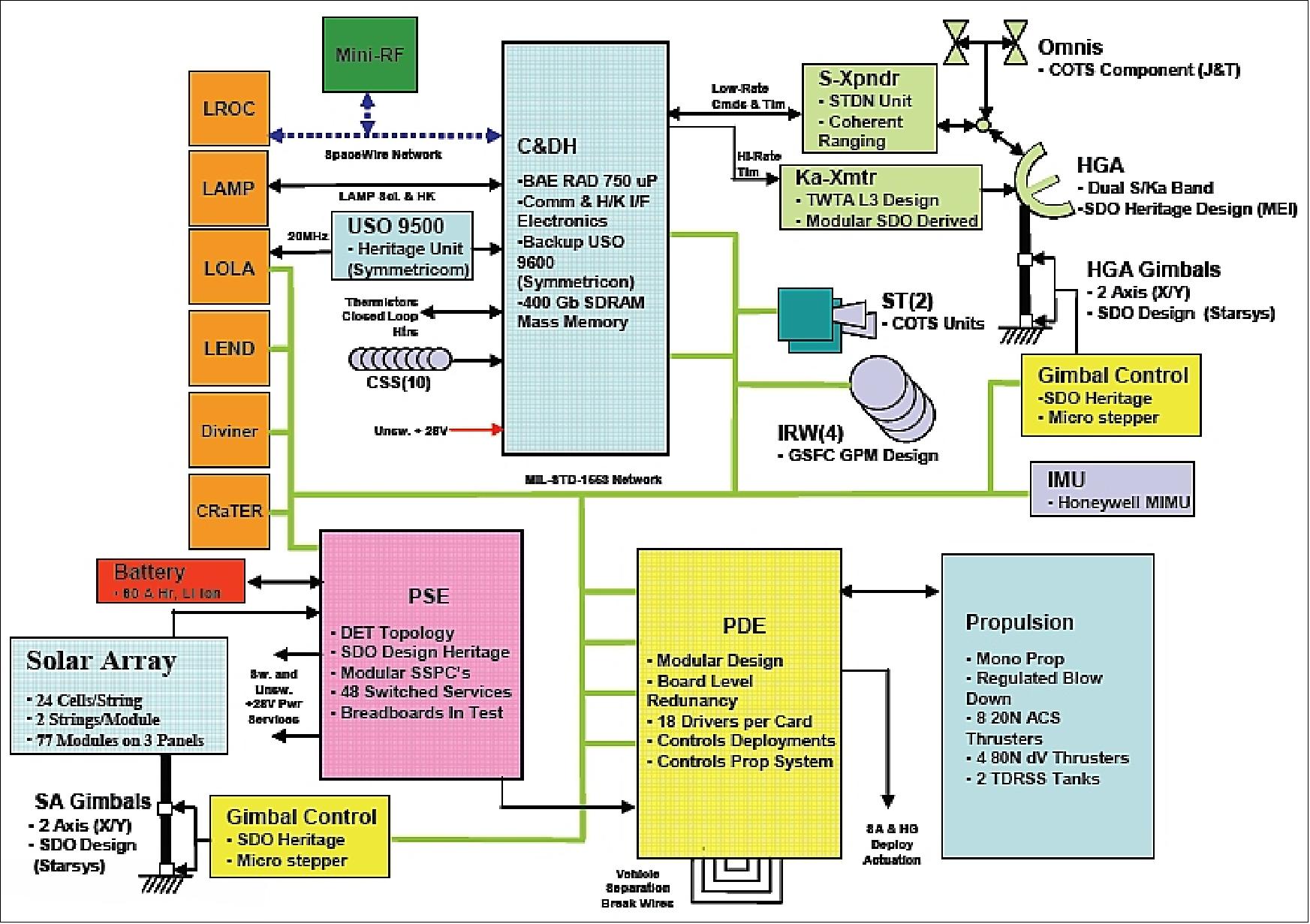
The C&DH (Command and Data Handling) subsystem comprises a radiation hardened SBC (Single Board Computer) for flight software, telemetry and command handling functions, system clock, and interfaces to all instruments. Data storage is provided by four DSB (Data Storage Board) devices. The onboard system architecture uses the SpaceWire bus in support of high-speed interfaces (LROC, Mini-RF, HK, UART, and LAMP), while the MIL-STD-1553B low-speed bus is used for LEND, DLRE, CRaTER, LOLA, ACS (Attitude Control Subsystem), PSE (Power System Electronics), and the propulsion subsystem.
Mass budget | 1846 kg (total), dry mass of 949 kg,, fuel mass of 897 kg |
Articulated solar array | Tri-panel solar array assembly of size 10.7 m2 |
Orbit power, power storage | 824 W (average), 1.5 kW (peak) |
Power storage | Li-ion battery, 84 parallel strings of 8 cells each, capacity of > 80 Ah (BOL) |
Data volume, max downlink data rate | 572 Gbit/day, 100 Mbit/s |
Spacecraft pointing accuracy, knowledge | 60 arcsec, 30 arcsec |
Flight computer | RAD-750 processor executing at 133 MHz |
C&DH (Command and Data Handling) subsystem | MIL-STD-1553, RS 422, & High Speed Serial Service |
Onboard data storage | Two 100 GByte recorders for science data playback to Earth |
Thrusters | 4 insertion thrusters deliver a total force of ~350 N |
Table 1: Overview of LRO spacecraft parameters
A one year primary mission is planned in ~50 km polar orbit, possible extended mission in communication relay/south pole observing, low-maintenance orbit. 8)
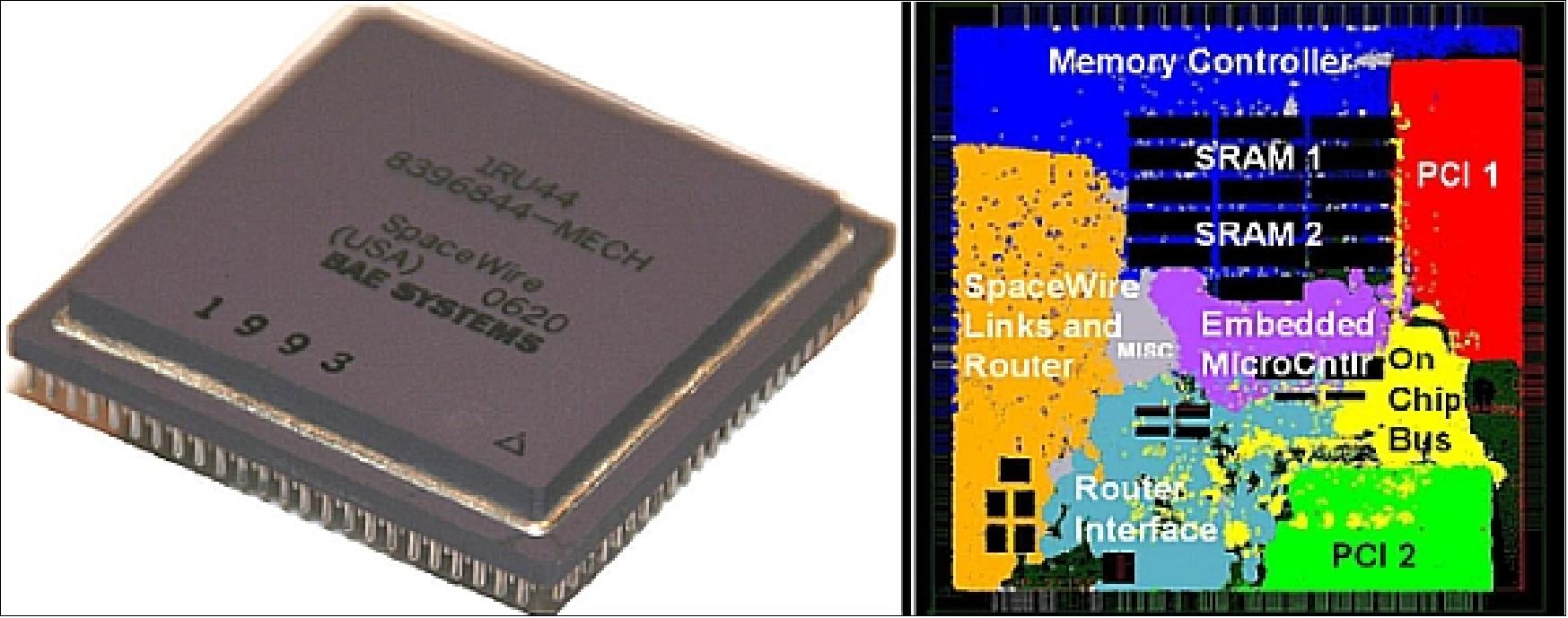
The spacecraft payload includes seven instruments, two of which are connected to the Command and Data Handling (C&DH) unit developed by NASA Goddard Space Flight Center via the SpaceWire network, as shown in Figure 4. The Mini-RF instrument is connected to the SpaceWire network through the SpaceWire ASIC. of BAE Systems (Manassas, VA). Within the C&DH unit, the RAD750 flight computer communicates with the instruments and other boards via three interfaces: a four-port SpaceWire router, a 32 bit, 33 MHz PCI bus, and a redundant MIL-STD-1553 bus. 9) 10) 11)
The SpaceWire router is implemented in the SpaceWire ASIC that is in turn connected to the RAD750 microprocessor via the PCI bus and the second generation enhanced Power PCI bridge ASIC. Both the Ka-band and S-band communications boards include SpaceWire interfaces with routers, implemented in Actel FPGAs. The LROC instrument is connected directly to one of the processor board’s SpaceWire links, while the Mini-RF connects to the Housekeeping and Input/Output (HK/IO) board that also implements a SpaceWire router using an Actel FPGA and is then routed to the processor board across the SpaceWire bus via the FPGA that implements another SpaceWire router. The 400 Gb LRO mass memory is implemented in synchronous DRAM that is interfaced to the RAD750 computer via the PCI bus on a custom C&DH backplane.
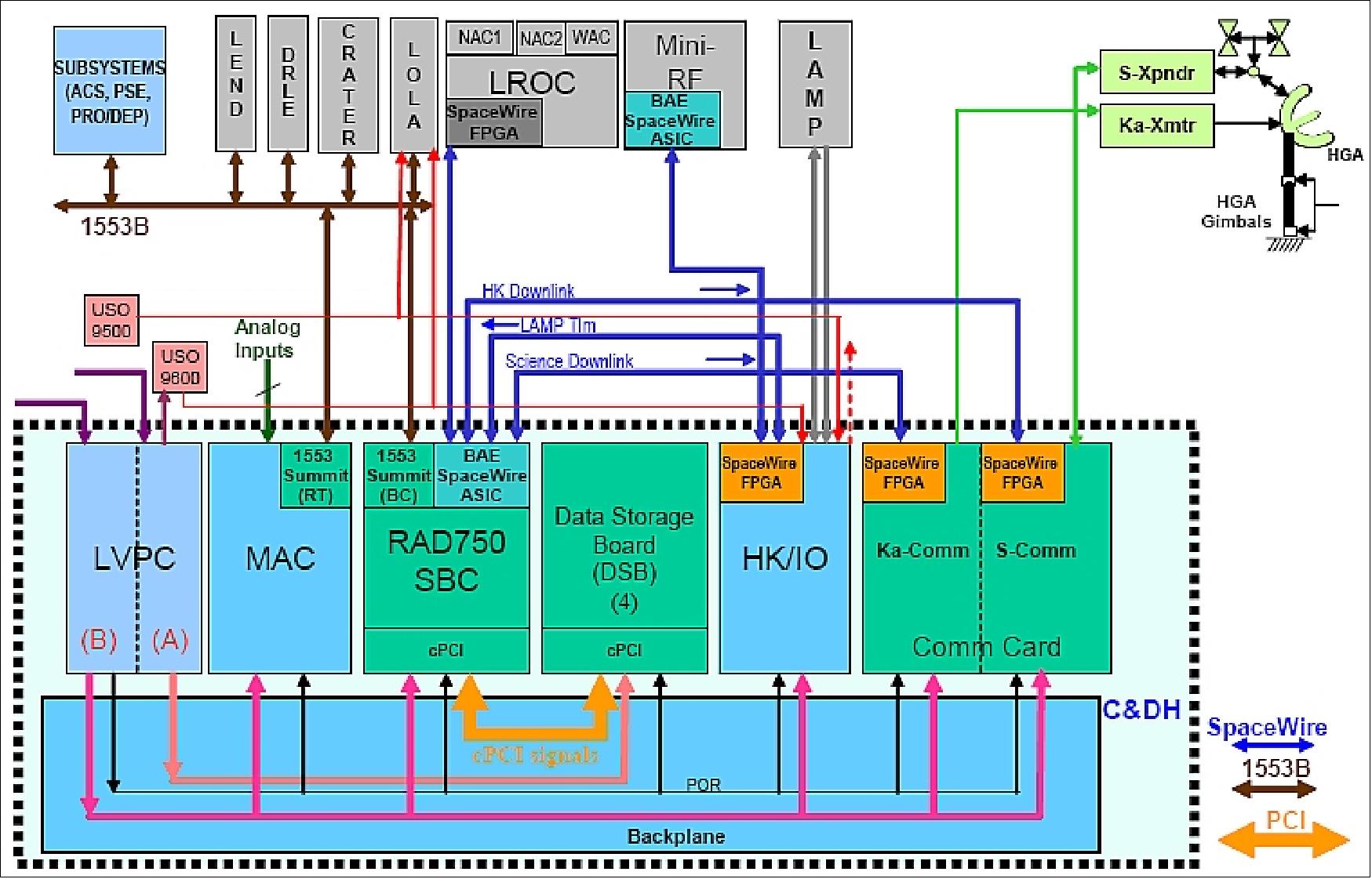
The RAD750 SBC (Single Board Computer) is a Compact PCI 6U-220 card with two printed wiring boards (PWBs). The RAD750 microprocessor operates at 132 MHz with a 66 MHz bus to I/O and memory, both of which are accessed through the enhanced Power PCI bridge ASIC. A total of 36 MB of radiation hardened SRAM is available to the RAD750, along with 4 MB of EEPROM and 64 KB of Start-up ROM, all provided with additional bits for error correction code (ECC).
The SpaceWire ASIC, shown in Figure 3 is based on BAE Systems' reusable core architecture. Its primary function is to perform routing of data using the SpaceWire protocol via a router with four external links and two internal connections to the SoC (System-on-a-Chip) bus, the standard cross-bar switch connection medium of the reusable core architecture. The SpaceWire ASIC software is included in the RAD750 Board Support Package (BSP). The BSP is designed for operation with the VxWorks (versions 5.4, 5.5, and 6.2) RTOS (Real Time Operating System).
Two 16 kB blocks of on-chip scratchpad memory are provided, as well as a 32-bit RISC processor called the EMC (Embedded Microcontroller). The EMC performs housekeeping functions as well as providing support for the SpaceWire router. A PLL (Phase Locked Loop) is provided for the SpaceWire link interface, which is capable of 280 MHz operation.
Software support for the CCSDS (Consultative Committee for Space Data Systems) File Delivery Protocol (CDFP) is split between the RAD750 CPU and the EMC within the SpaceWire ASIC. The function of the software executing within the SpaceWire ASIC is to assist in CDFP download to maximize downlink throughput by sending batches of CDFP data packets, known as Protocol Data Units (PDU), over the SpaceWire interface to the Ka-band communications link.
Launch
The LRO and the companion LCROSS spacecraft were launched on June 18, 2009 on an Atlas V 401 launch vehicle from the Air Force Station at Cape Canaveral, FLA. LRO safely separated from LCROSS 45 minutes after launch. 12) 13)
LCROSS then was powered-up, and the mission operations team at NASA's Ames Research Center at Moffett Field, CA, performed system checks that confirmed the spacecraft is fully functional. LCROSS and its attached Centaur upper stage rocket separately impacted on the moon on Oct. 9, 2009, creating a pair of debris plumes that will be analyzed for the presence of water ice or water vapor, hydrocarbons and hydrated materials. The spacecraft and Centaur are tentatively targeted to impact the moon's south pole near the Cabeus region. The exact target crater will be identified 30 days before impact, after considering information collected by LRO, other spacecraft orbiting the moon, and observatories on Earth.
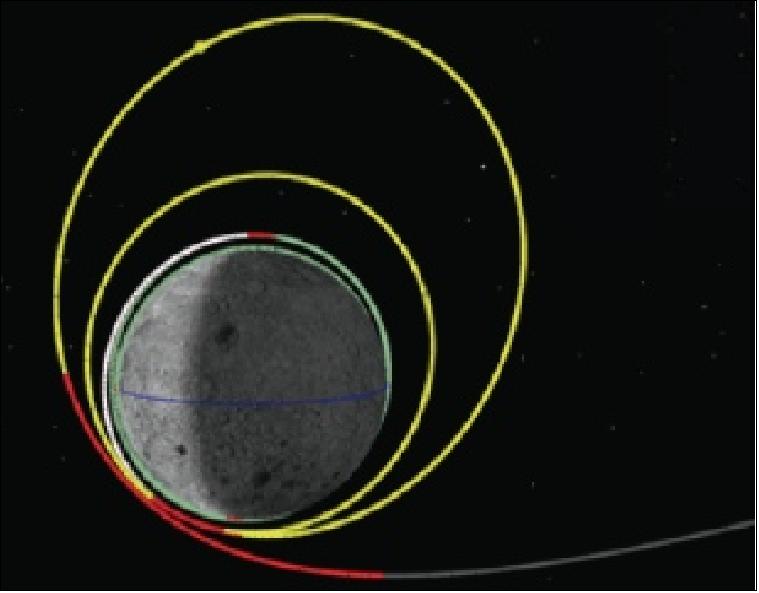
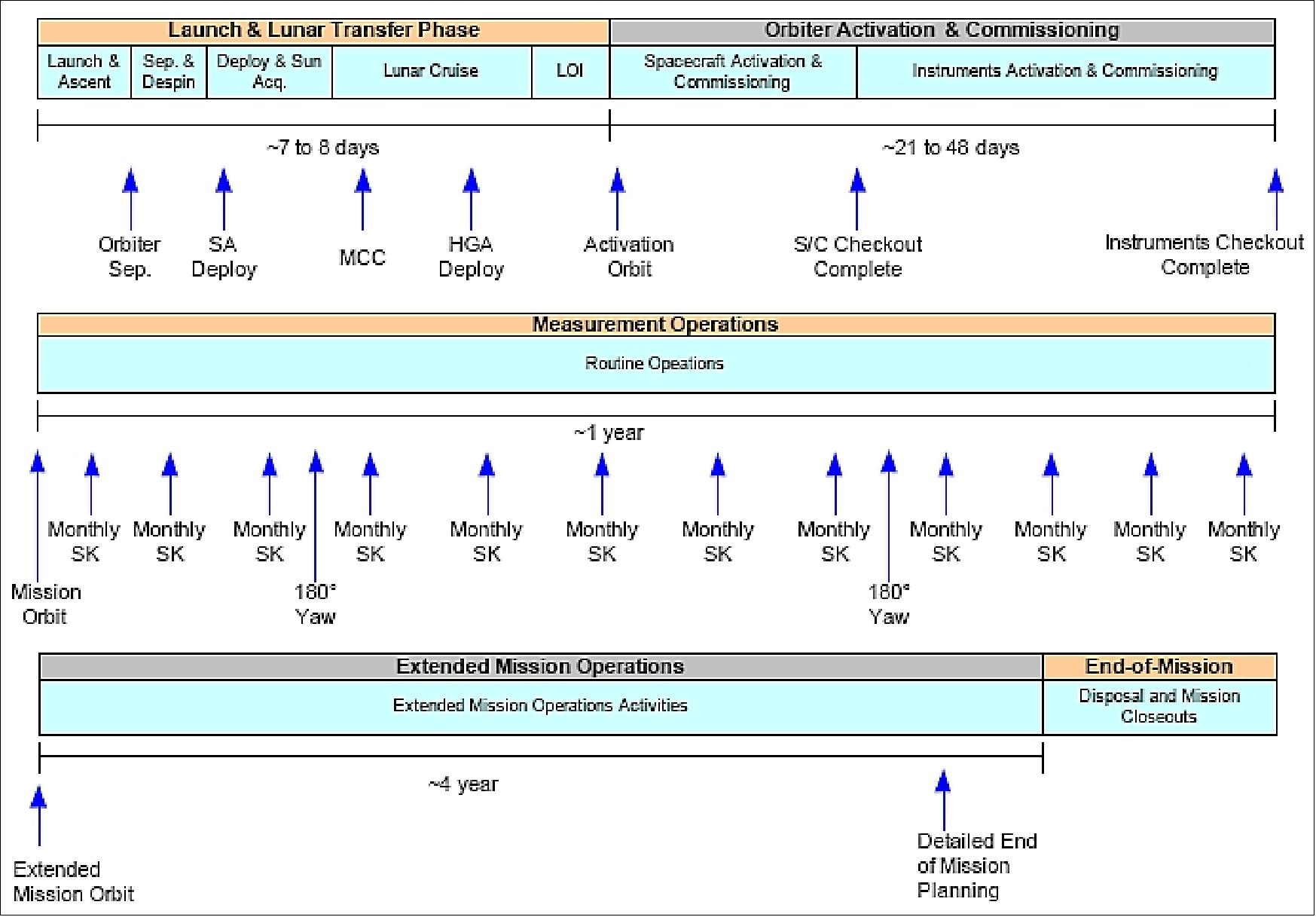
Orbit: Direct insertion orbit of LRO to the moon. 14)
• Minimum energy lunar transfer orbit (~ 4 days). The launch vehicle will inject LRO into a cis-lunar transfer orbit.
• Lunar orbit insertion sequence (4 maneuvers, 2-4 days, use of onboard propulsion system)
• Commissioning phase in lunar orbit: altitude of 30 km x 216 km, quasi-frozen orbit, up to 60 days
• Polar mapping phase for a duration of at least 1 year. The LRO orbit is nominally 50 km circular and polar, with a period of ~ 113 minutes. The orbital velocity is 1.6 km/s. LRO stays on near side of moon ~ 1 hour out of every two.
Viewing conditions of LRO from Earth for operations support:
• Communication/ranging (SLR) with the LRO spacecraft is possible during the near-side orbital phase of the moon
• Twice a month, LRO's orbit will be in full view of the Earth for roughly 2 days
• Twice a month, LRO will perform a momentum management maneuver while the ground has complete coverage
• Once a month, LRO will perform a station-keeping maneuver while the ground has complete coverage
• Twice a year, LRO's orbit will be in full view of the sun for roughly one month
• During the eclipse season, LRO will have a maximum lunar occultation of 48 minutes
• Twice a year, LRO will perform a 180º yaw maneuver
• Twice a year, the moon will pass through the Earth's shadow (lunar eclipse).
RF-communications: 15)
The S-band is used for TT&C (Telemetry, Tracking & Command) data. Proximity relay is planned to enable mission cross-support at S-band.
- Frequency: Transmit: 2271.2 MHz ±2.5 MHz; Receive: 2091.3967 MHz ±2.5 MHz
- Modulated RF (at the transponder output): 39.1±0.3 dBm (7.58 -8.71 W)
- Acquisition threshold: -121 dBm (receiver ON at all times)
- Modulation: BPSK
• Ranging:
- Coherent downlink ranging generation
- Compatible with STDN and DSN ranging modes
- 1.7 MHz downlink subcarrier; 16 kHz uplink subcarrier
• Data rates in S-band: Uplink:4 kbps uplink capability; Downlink: 0.125, 2, 16, 32, 64, 128, 256 kbit/s (with/without ranging) and 1.093 Mbit/s (direct modulation)
• Control and status interface: UART (Universal Asynchronous Receive Transmit) serial port
• DC Power: ≤ 45 W (full mode): ≤ 10 W (receive only)
The Ka-band is used for the downlink of instrument data (40 W transmitter and high-gain antenna).
- Frequency: 25.65 GHz
- Bandwidth: 300 MHz (±150 MHz)
- Modulation: OQPSK
- DC power: ≤ 30 W
- I/Q channel data inputs: LVDS interface, I and Q staggered by half of a symbol bit
• Symbol rate inputs (after rate ½, K=7 Convolutional and R/S encoding done by C&DH):
- 228.7 Msps (Mega samples per second, normal operations)
- 114.3 Msps or 57.2 Msps (contingency operations)
Mission Status
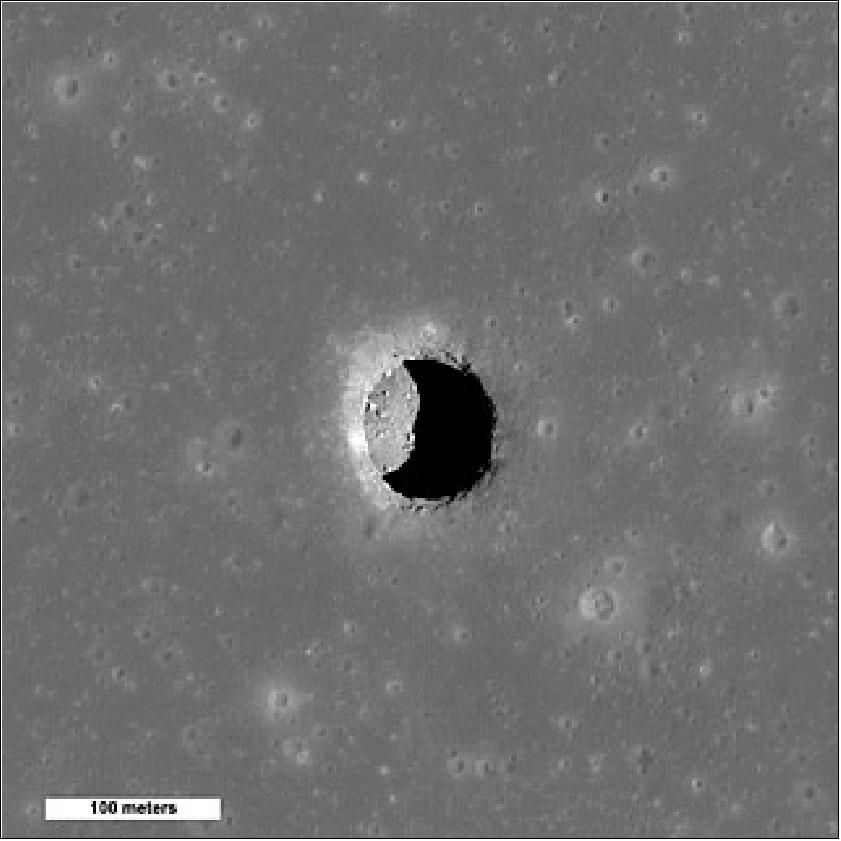
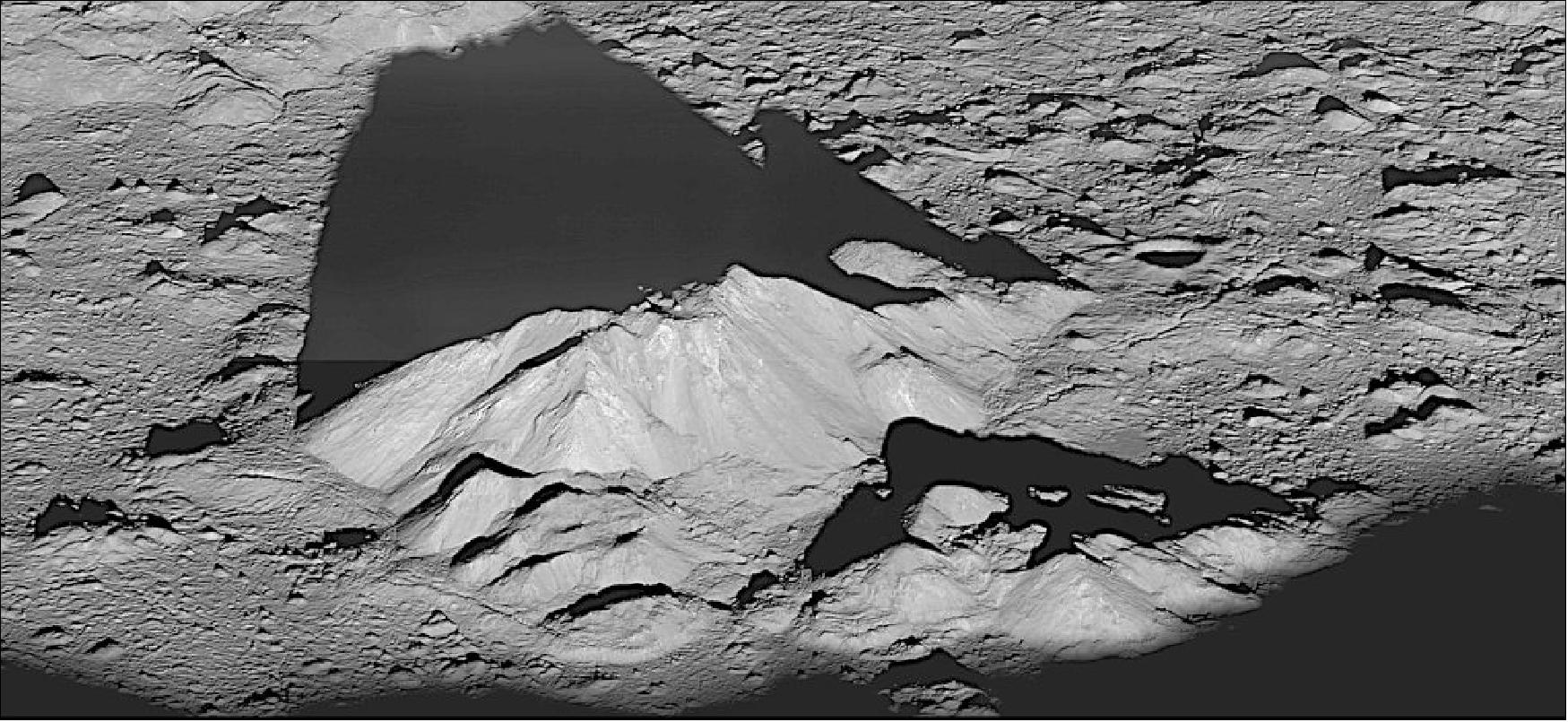
• July 26, 2022: NASA-funded scientists have discovered shaded locations within pits on the Moon that always hover around a comfortable 63 F (about 17 C) using data from NASA’s Lunar Reconnaissance Orbiter (LRO) spacecraft and computer modeling. 17)
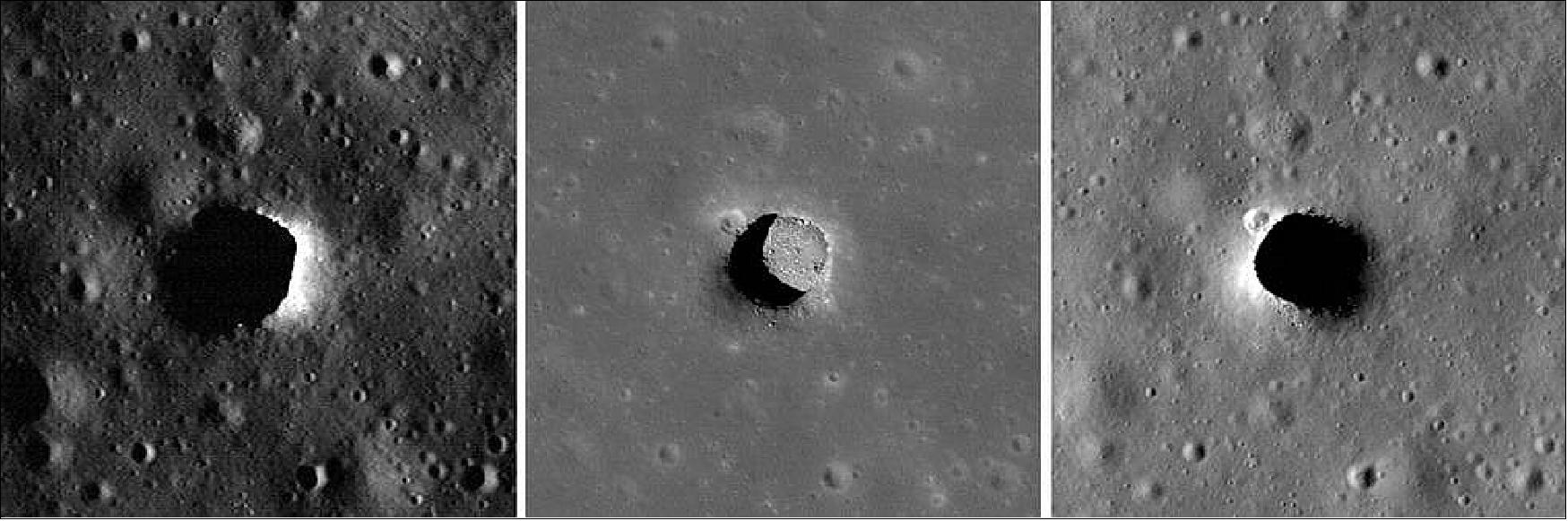
- Pits were first discovered on the Moon in 2009, and since then, scientists have wondered if they led to caves that could be explored or used as shelters. The pits or caves would also offer some protection from cosmic rays, solar radiation and micrometeorites.
- “About 16 of the more than 200 pits are probably collapsed lava tubes,” said Tyler Horvath, a doctoral student in planetary science at the University of California, Los Angeles, who led the new research, recently published in the journal Geophysical Research Letters. 18)
- Lava tubes, also found on Earth, form when molten lava flows beneath a field of cooled lava or a crust forms over a river of lava, leaving a long, hollow tunnel. If the ceiling of a solidified lava tube collapses, it opens a pit that can lead into the rest of the cave-like tube.
- Two of the most prominent pits have visible overhangs that clearly lead to caves or voids, and there is strong evidence that another’s overhang may also lead to a large cave.
- “Humans evolved living in caves, and to caves we might return when we live on the Moon,” said David Paige, a co-author of the paper who leads the Diviner Lunar Radiometer Experiment aboard LRO that made the temperature measurements used in the study.
- Horvath processed data from Diviner – a thermal camera – to find out if the temperature within the pits diverged from those on the surface.
- Focusing on a roughly cylindrical 328-foot (100-meter)–deep depression about the length and width of a football field in an area of the Moon known as the Mare Tranquillitatis, Horvath and his colleagues used computer modeling to analyze the thermal properties of the rock and lunar dust and to chart the pit’s temperatures over time.
- The results revealed that temperatures within the permanently shadowed reaches of the pit fluctuate only slightly throughout the lunar day, remaining at around 63 F or 17 C. If a cave extends from the bottom of the pit, as images taken by LRO’s Lunar Reconnaissance Orbiter Camera suggest, it too would have this relatively comfortable temperature.
- The team, which included UCLA professor of planetary science David Paige and Paul Hayne of the University of Colorado Boulder, believes the shadowing overhang is responsible for the steady temperature, limiting how hot things gets during the day and preventing heat from radiating away at night.
- A day on the Moon lasts about 15 Earth days, during which the surface is constantly bombarded by sunlight and is frequently hot enough to boil water. Brutally cold nights also last about 15 Earth days.
- The research was funded by NASA’s Lunar Reconnaissance Orbiter project, Extended Mission 4. LRO is managed by NASA's Goddard Space Flight Center in Greenbelt, Maryland, for the Science Mission Directorate at NASA Headquarters in Washington. Launched on June 18, 2009, LRO has collected a treasure trove of data with its seven powerful instruments, making an invaluable contribution to our knowledge about the Moon. Diviner was built and developed by the University of California, Los Angeles, and NASA's Jet Propulsion Laboratory in Pasadena, California.
- NASA is returning to the Moon with commercial and international partners to expand human presence in space and bring back new knowledge and opportunities.
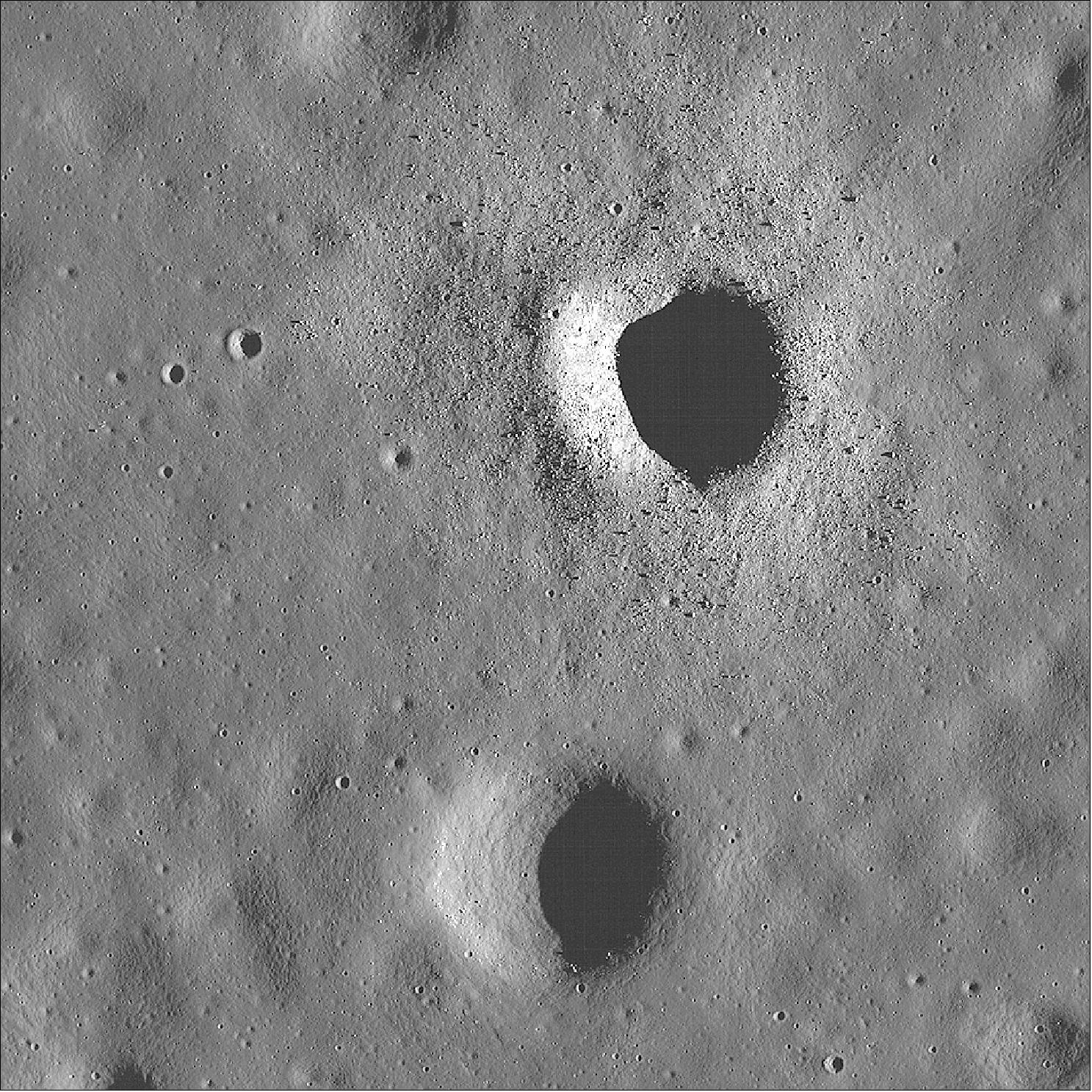
• June 24, 2022: Astronomers discovered a rocket body heading toward a lunar collision late last year. Impact occurred March 4, with NASA's Lunar Reconnaissance Orbiter later spotting the resulting crater. Surprisingly the crater is actually two craters, an eastern crater (18-meter diameter, about 19.5 yards) superimposed on a western crater (16-meter diameter, about 17.5 yards). 19)

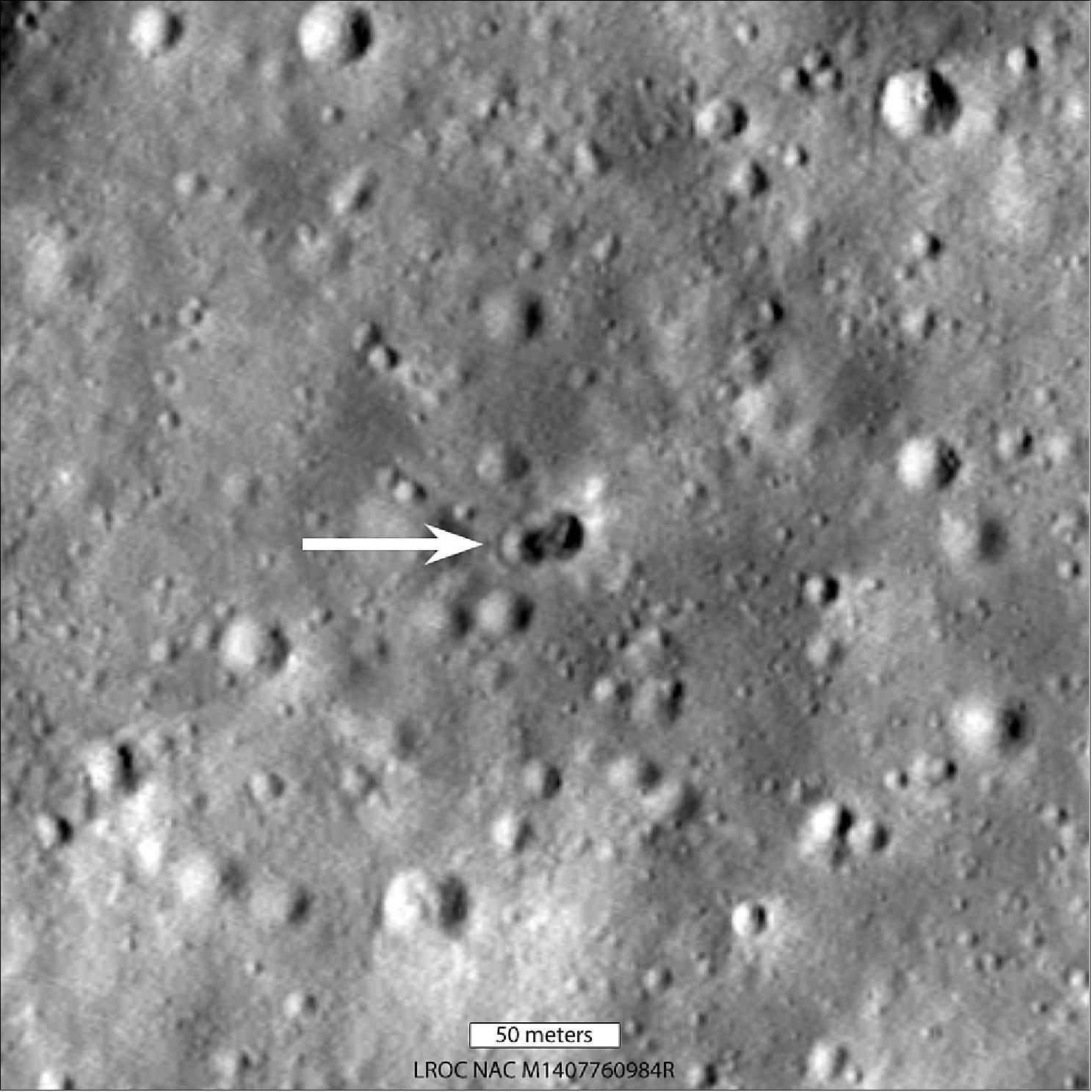
- The double crater was unexpected and may indicate that the rocket body had large masses at each end. Typically a spent rocket has mass concentrated at the motor end; the rest of the rocket stage mainly consists of an empty fuel tank. Since the origin of the rocket body remains uncertain, the double nature of the crater may indicate its identity.
- LRO is managed by NASA's Goddard Space Flight Center in Greenbelt, Maryland, for the Science Mission Directorate at NASA Headquarters in Washington. Launched on June 18, 2009, LRO has collected a treasure trove of data with its seven powerful instruments, making an invaluable contribution to our knowledge about the Moon. NASA is returning to the Moon with commercial and international partners to expand human presence in space and bring back new knowledge and opportunities.
• April 25, 2022: Following a thorough evaluation, NASA has extended the planetary science missions of eight of its spacecraft due to their scientific productivity and potential to deepen our knowledge and understanding of the solar system and beyond. 20)
- The missions – Mars Odyssey, Mars Reconnaissance Orbiter, MAVEN, Mars Science Laboratory (Curiosity rover), InSight lander, Lunar Reconnaissance Orbiter (LRO), OSIRIS-REx, and New Horizons – have been selected for continuation, assuming their spacecraft remain healthy. Most of the missions will be extended for three years; however, OSIRIS-REx will be continued for nine years in order to reach a new destination, and InSight will be continued until the end of 2022, unless the spacecraft’s electrical power allows for longer operations.
- Each extended mission proposal was reviewed by a panel of independent experts drawn from academia, industry, and NASA. In total, more than 50 reviewers evaluated the scientific return of the respective proposals. Two independent review chairs oversaw the process and, based on the panel evaluations, validated that these eight science missions hold substantial potential to continue bringing new discoveries and addressing compelling new science questions.
- Beyond providing important programmatic benefit to NASA, several of these missions promise multi-divisional science benefits across NASA’s entire Science Mission Directorate (SMD), including their use as data relays for Mars surface landers and rovers, as well as to support other NASA initiatives such as the Commercial Lunar Payload Services (CLPS).
- “Extended missions provide us with the opportunity to leverage NASA’s large investments in exploration, allowing continued science operations at a cost far lower than developing a new mission,” said Lori Glaze, director of the Planetary Science Division at NASA’s Headquarters in Washington. “Maximizing taxpayer dollars in this way allows missions to obtain valuable new science data, and in some cases, allows NASA to explore new targets with totally new science goals.”
- Lunar Reconnaissance Orbiter (LRO) (Project Scientist: Dr. Noah Petro, GSFC): LRO will continue to study the surface and geology of the Moon. The evolution of LRO’s orbit will allow it to study new regions away from the poles in unprecedented detail, including the Permanently Shadowed Regions (PSRs) near the poles where water ice may be found. LRO will also provide important programmatic support for NASA’s efforts to return to the Moon.
• February 11, 2021: NASA’s Lunar Reconnaissance Orbiter (LRO) spacecraft has far exceeded its planned mission duration, revealing that the Moon holds surprises: ice deposits that could be used to support future lunar exploration, the coldest places in the solar system in permanently shadowed regions at the lunar poles, and that it is an active world that is shrinking, generating moonquakes and changing in front of our eyes. LRO has mapped the surface in exquisite detail, returning millions of images of a starkly beautiful lunar landscape and paving the way for future human missions under NASA’s Artemis program. 21)
- In the Spring of 2018, LRO’s Miniature Inertial Measurement Unit (MIMU), a critical sensor used to help point the spacecraft’s instruments, was powered off to preserve its remaining life after exhibiting signs of decline due to natural aging in the harsh environment of space. The MIMU is like a speedometer. It measures LRO’s speed of rotation. Without it, LRO was forced to rely only on data from star trackers - video cameras with image processing software that infers orientation based on star maps - to point and reorient the spacecraft. “This limited the ability to reorient (slew) the spacecraft for science purposes,” said Julie Halverson, Lead Systems Engineer in Space Science Mission Operations at NASA’s Goddard Space Flight Center in Greenbelt, Maryland.
- “Reorienting the spacecraft to get side-view data is valuable for scientists as it allows us to measure how light reflects off the Moon differently, depending on the view of the instrument,” said Noah Petro, Project Scientist for LRO at NASA Goddard. “This is called the photometry of the surface. Additionally, the camera takes side-view images to build 3D images of the surface and to collect the perspective views of the Moon that help dis-entangle geologic relationships.” To get LRO slewing again, NASA engineers developed a new algorithm that can estimate LRO’s speed of rotation by fusing star-tracker measurements together with other information available from LRO’s flight computer.
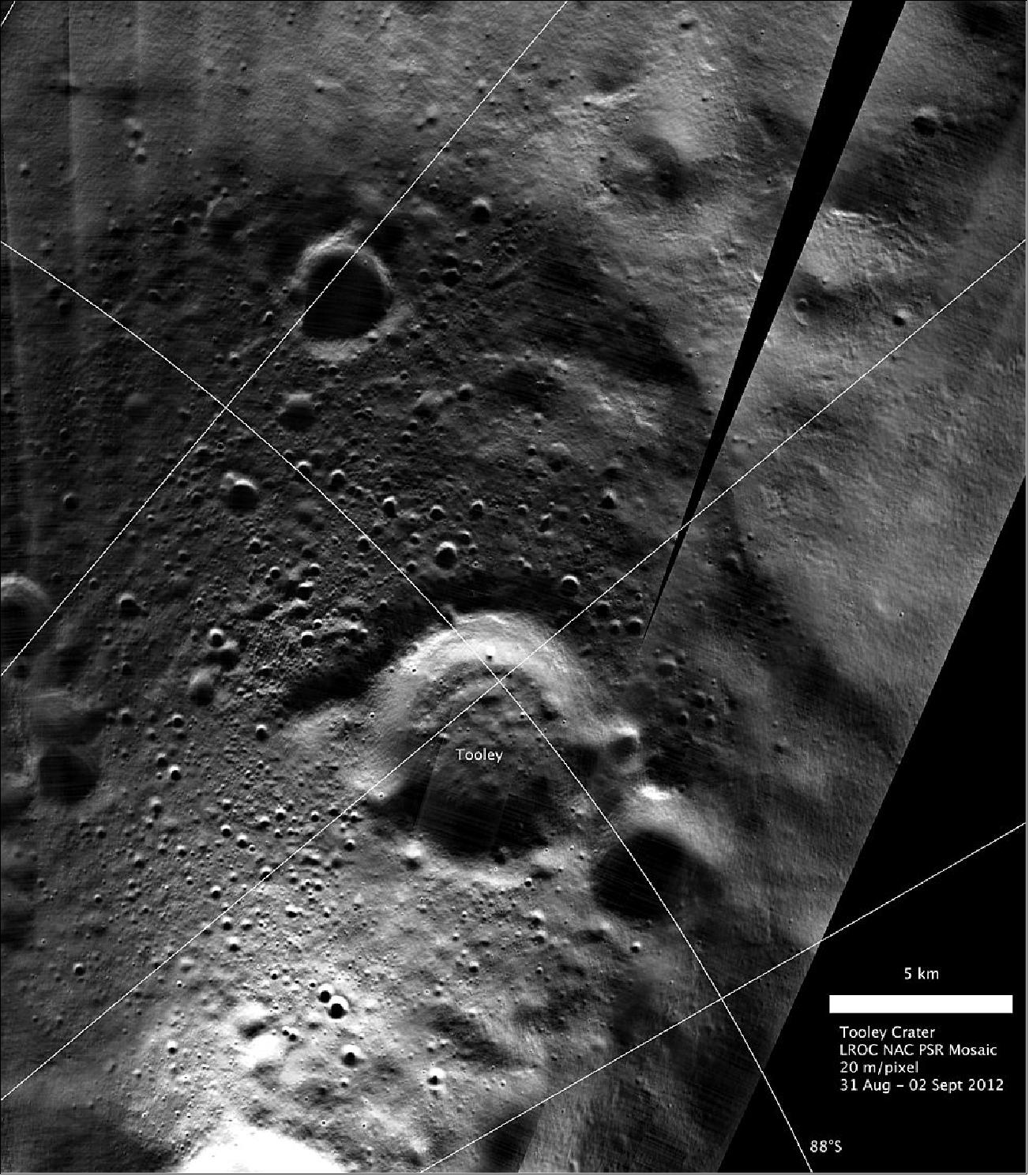
• January 26, 2021: Like Einstein, Galileo, and Copernicus, former NASA program manager Craig Tooley now has a place on the Moon named in his honor. Tooley crater is a 7 km crater in a permanently shadowed region of Shoemaker crater near the lunar south pole. The new crater designation is official and can be used in journal articles and other publications. 22)
How do you feel about Craig having a crater named after him?
- “First of all, it is a great honor. It makes me very proud of my brother and warms my heart every night when I look up at the Moon and think about his crater and his achievements. I am in constant awe of the impact that Craig had at NASA and the lengths that everyone at NASA and in the space sciences community have gone to honor his memory.” – Matt Tooley
- This act pays homage to the numerous accomplishments and indelible contributions Tooley made to NASA’s exploration community during his 34 years of service. After Tooley’s passing in September, 2017, members of NASA’s Lunar Reconnaissance Orbiter (LRO team) wanted to memorialize Tooley by having a lunar crater named after him. They petitioned the International Astronomical Union Working Group for Planetary System Nomenclature, which approved their request to name a lunar crater after Tooley, the former LRO project manager from NASA’s Goddard Space Flight Center in Greenbelt, Maryland.
What would Craig think about having a crater named after him?
- “He didn't care much about the physical markers or awards, though he certainly got a lot of them. This is different — it's very meaningful, and he would have loved it. He probably would have said something about how none of the achievements would have been possible without the great teams he worked with, and that this was just the culmination of many different people's work. But also, he would have been so touched.” –Terri Rutledge (Craig’s widow)
- Tooley oversaw LRO’s successful launch in 2009, and the mission continues to make groundbreaking discoveries of Earth’s closest celestial neighbor. He transitioned into the same position for the Magnetospheric Multiscale (MMS) mission, a quartet of spacecraft launched in 2015 to study our planet’s magnetosphere and provide insight into the phenomenon of magnetic reconnection.
- Tooley came to Goddard in 1983 after receiving his bachelor’s in mechanical engineering from the University of Evansville in Indiana. He later earned a master’s in the same field from the University of Maryland, College Park, in 1990. He joined the Flight Projects Directorate in 1996. In doing so, he built a reputation as the go-to guy for some of NASA’s highest-profile missions, leveraging years of technical experience to become the consummate project manager.
- Tooley became Deputy Project Manager for the Triana mission, laying the groundwork for the climate observation mission which would later be resurrected as DSCOVR. He helped develop procedures and train astronauts for the Hubble Space Telescope’s fourth servicing mission in 2002. He then headed Hubble’s Instrument Development Office, overseeing the development of instruments that were installed during the fifth and final servicing mission in 2009.
- In his most recent position as Applied Engineering and Technology Directorate Deputy Director, Tooley used the knowledge he acquired over the years to push Goddard’s capabilities forward, championing new and emerging technologies such as advanced electronics systems, CubeSats, and SmallSats.
- “Craig grew up watching Apollo missions, reading science fiction, and launching model rockets. So, for Craig, working at NASA was like a dream come true. Even though he worked very hard, and when needed took things very seriously, working at NASA for him was always fun. He believed in NASA's mission, and liked being a part of it.” – Matt Tooley.
- His accomplishments as an engineer enabling science and exploration go well beyond LRO. He served as the mission manager and mechanical lead for five successful Spartan 201 heliophysics missions deployed during space shuttle missions flown on STS-56, STS-64, STS-69, STS-87, and STS-95. LRO, DSCOVR, and MMS are still in operation today.
- He was the recipient of numerous awards, most notably two NASA Outstanding Leadership Medals – among the Agency’s highest honors – for his work on the LRO and MMS missions.
- Tooley’s memory will be forever etched into space exploration with the naming of one of the MMS spacecrafts as “Craig.” His most enduring legacy to Goddard, however, will be the many teams and individuals he impacted both personally and professionally, all embodying his spirit of discovery and innovation. Tooley exhibited an infectious optimism for spaceflight, and as a manager, he always advocated for inclusive leadership and open communication. His passion for and approach to NASA work produced many dedicated teams and successful missions throughout his career.
What did working for NASA mean to him?
- “It was his life's passion, besides his family — he loved his work and he inspired others to love it as well. He also fiercely loved mentoring younger folks, especially women and folks of color who haven't traditionally been represented in these kinds of careers. He would get so excited telling stories of how those he had mentored were successful. Even if space exploration wasn't someone's particular passion, he was a role model for loving your work.
- "He also embodied lifelong learning: we would talk about how he had read up on some specific statistics or modeling approach to better understand the complexities one section of his team was currently facing. Even when he was sick and in between hospital visits, he set out to learn to program in Python and proudly showed us how he had made a simple Graphical User Interface to calculate orbital trajectories with his newfound skills.” – Terri Rutledge.
What were some of Craig’s hobbies?
- “He loved hiking, camping, and being outdoors — growing up, we heard stories of our parents' backpacking adventures, and the acquisition of a 1971 VW camper bus after we were born brought even more fun. He also inculcated a love for reading, particularly science fiction, in us, which was surely intertwined with his passion for space; we grew up reading Issac Asimov, Robert Heinlein, and other classics.” –Ursula & Maia Tooley (Craig’s daughters).
- Tooley’s legacy and crater will serve as “True North” for his wife Terri, their daughters Ursula and Maia, his NASA colleagues, and other members of his family and friends. — Goddard's remembrance service for Tooley in 2017.
• October 26, 2020: Small shadowed cold traps scattered across the lunar polar regions could contain up to 20 percent of the frozen water on the Moon, making accessing water sources easier for lunar visitors. 23)

- “Future lunar rovers may have a hard time driving into a large dark crater with extremely low temperatures. Small cold traps are far more accessible,” PSI (Planetary Science Institute) Senior Scientist Norbert Schörghofer said. “Approximately 10 to 20% of the permanent cold-trap area for water is found to be contained in these micro cold traps. In terms of numbers, most cold traps are smaller than 1 meter.”
- Schörghofer coauthored the new paper “Micro cold traps on the Moon” that appears in Nature Astronomy. Assistant Professor Paul O. Hayne of the Laboratory for Atmospheric & Space Physics, and Astrophysical & Planetary Sciences Department, University of Colorado is lead author. Oded Aharonson, a Professor at the Weizmann Institute of Science and PSI Senior Scientist, is also a coauthor. 24)
- “I think the way this changes our perspective of water on the Moon is that until now, our efforts were focused on the largest reservoirs situated within the broadest and deepest craters at high latitudes. But we now understand that we expect a large number of much smaller reservoirs of water,” Aharonson said. “The smaller deposits should be more accessible for at least two reasons: the distance to the nearest one from a hypothetical landing site might be shorter; and the deposit would not be surrounded by imposing tall crater rims, but rather much gentler slopes.”
- The team used theoretical models and diverse data from NASA’s Lunar Reconnaissance Orbiter to study shaded areas where water ice could exist on the Moon’s surface.
- “Spacecraft that orbit the Moon provide us with snapshots of the surface at a limited spatial resolution. Anything smaller than that has to be inferred statistically. The closer you look the more cold traps you see,” Schörghofer said. “This study combines a suite of data sets with a suite of extrapolation techniques to estimate the actual number and total area of cold traps and permanently shadowed regions over the entire surface of the Moon.”
- For example, the team calculated how the instantaneous shadow in a crater for a given height of the Sun above the horizon is related to the extent of the truly permanent shadow in that crater. They then measured the extent of shadows in thousands of images of the lunar surface for various Sun elevations, and combined the measurements with the geometric factors to estimate the total area in permanent shadow. They also calculated the temperatures of these areas to predict in which one’s ice can accumulate.
- “Accessing water ice deposits on the Moon is enticing for scientific as well as practical reasons: we wish to investigate the chemistry and history of this important material, and we hope to mine it for human utilization. Together with energy from the Sun or another source, frozen ice may be converted to liquid water or even to hydrogen fuel,” Aharonson said.
- PSI work was funded by grants from NASA’s Lunar Reconnaissance Orbiter mission as well as the Solar System Exploration Research Virtual Institute TREX project.
• July 1, 2020: What started out as a hunt for ice lurking in polar lunar craters turned into an unexpected finding that could help clear some muddy history about the Moon’s formation. 25)
- Team members of the Miniature Radio Frequency (Mini-RF) instrument on NASA’s Lunar Reconnaissance Orbiter (LRO) spacecraft found new evidence that the Moon’s subsurface might be richer in metals, like iron and titanium, than researchers thought. That finding, published July 1 in Earth and Planetary Science Letters, could aid in drawing a clearer connection between Earth and the Moon.
- “The LRO mission and its radar instrument continue to surprise us with new insights about the origins and complexity of our nearest neighbor,” said Wes Patterson, Mini-RF principal investigator from the Johns Hopkins Applied Physics Laboratory (APL) in Laurel, Maryland, and a study coauthor.
- Substantial evidence points to the Moon as the product of a collision between a Mars-sized protoplanet and young Earth, forming from the gravitational collapse of the remaining cloud of debris. Consequently, the Moon’s bulk chemical composition closely resembles that of Earth.
- Look in detail at the Moon’s chemical composition, however, and that story turns murky. For example, in the bright plains of the Moon’s surface, called the lunar highlands, rocks contain smaller amounts of metal-bearing minerals relative to Earth. That finding might be explained if Earth had fully differentiated into a core, mantle and crust before the impact, leaving the Moon largely metal-poor. But turn to the Moon’s maria — the large, darker plains — and the metal abundance becomes richer than that of many rocks on Earth.
- This discrepancy has puzzled scientists, leading to numerous questions and hypotheses regarding how much the impacting protoplanet may have contributed to the differences. The Mini-RF team found a curious pattern that could lead to an answer.
- Using Mini-RF, the researchers sought to measure an electrical property within lunar soil piled on crater floors in the Moon’s northern hemisphere. This electrical property is known as the dielectric constant, a number that compares the relative abilities of a material and the vacuum of space to transmit electric fields, and could help locate ice lurking in the crater shadows. The team, however, noticed this property increasing with crater size.
- For craters approximately 1 to 3 miles (2 to 5 kilometers) wide, the dielectric constant of the material steadily increased as the craters grew larger, but for craters 3 to 12 miles (5 to 20 kilometers) wide, the property remained constant.
- “It was a surprising relationship that we had no reason to believe would exist,” said Essam Heggy, co-investigator of the Mini-RF experiments from the University of Southern California in Los Angeles and lead author of the published paper. 26)
- Discovery of this pattern opened a door to a new possibility. Because meteors that form larger craters also dig deeper into the Moon’s subsurface, the team reasoned that the increasing dielectric constant of the dust in larger craters could be the result of meteors excavating iron and titanium oxides that lie below the surface. Dielectric properties are directly linked to the concentration of these metal minerals.
- If their hypothesis were true, it would mean only the first few hundred meters of the Moon’s surface is scant in iron and titanium oxides, but below the surface, there’s a steady increase to a rich and unexpected bonanza.
- Comparing crater floor radar images from Mini-RF with metal oxide maps from the LRO Wide-Angle Camera, Japan’s Kaguya mission and NASA’s Lunar Prospector spacecraft, the team found exactly what it had suspected. The larger craters, with their increased dielectric material, were also richer in metals, suggesting that more iron and titanium oxides had been excavated from the depths of 0.3 to 1 mile (0.5 to 2 kilometers) than from the upper 0.1 to 0.3 miles (0.2 to 0.5 kilometers) of the lunar subsurface.
- “This exciting result from Mini-RF shows that even after 11 years in operation at the Moon, we are still making new discoveries about the ancient history of our nearest neighbor,” said Noah Petro, the LRO project scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. “The MINI-RF data is incredibly valuable for telling us about the properties of the lunar surface, but we use that data to infer what was happening over 4.5 billion years ago!”
- These results follow recent evidence from NASA’s Gravity Recovery and Interior Laboratory (GRAIL) mission that suggests a significant mass of dense material exists just a few tens to hundreds of kilometers beneath the Moon’s enormous South Pole-Aitken basin, indicating that dense materials aren’t uniformly distributed in the Moon’s subsurface.

- The team emphasizes that the new study can’t directly answer the outstanding questions about the Moon’s formation, but it does reduce the uncertainty in the distribution of iron and titanium oxides in the lunar subsurface and provide critical evidence needed to better understand the Moon’s formation and its connection to Earth.
- “It really raises the question of what this means for our previous formation hypotheses,” Heggy said.
- Anxious to uncover more, the researchers have already started examining crater floors in the Moon’s southern hemisphere to see if the same trends exist there.
- LRO is managed by NASA’s Goddard Space Flight Center in Greenbelt, Maryland for the Science Mission Directorate at NASA Headquarters in Washington. Mini-RF was designed, built and tested by a team led by APL, Naval Air Warfare Center, Sandia National Laboratories, Raytheon and Northrop Grumman.
• April 30, 2020: Strange spots scattered across the Moon’s nearside where bedrock is conspicuously exposed are evidence of seismic activity set in motion 4.3 billion years ago that could be ongoing today, the researchers say. 27)
- Researchers have discovered a system of ridges spread across the nearside of the Moon topped with freshly exposed boulders. The ridges could be evidence of active lunar tectonic processes, the researchers say, possibly the echo of a long-ago impact that nearly tore the Moon apart.
- “There’s this assumption that the Moon is long dead, but we keep finding that that’s not the case,” said Peter Schultz, a professor in Brown University’s Department of Earth, Environmental and Planetary Sciences and co-author of the research, which is published in the journal Geology. “From this paper it appears that the Moon may still be creaking and cracking — potentially in the present day — and we can see the evidence on these ridges.” 28)
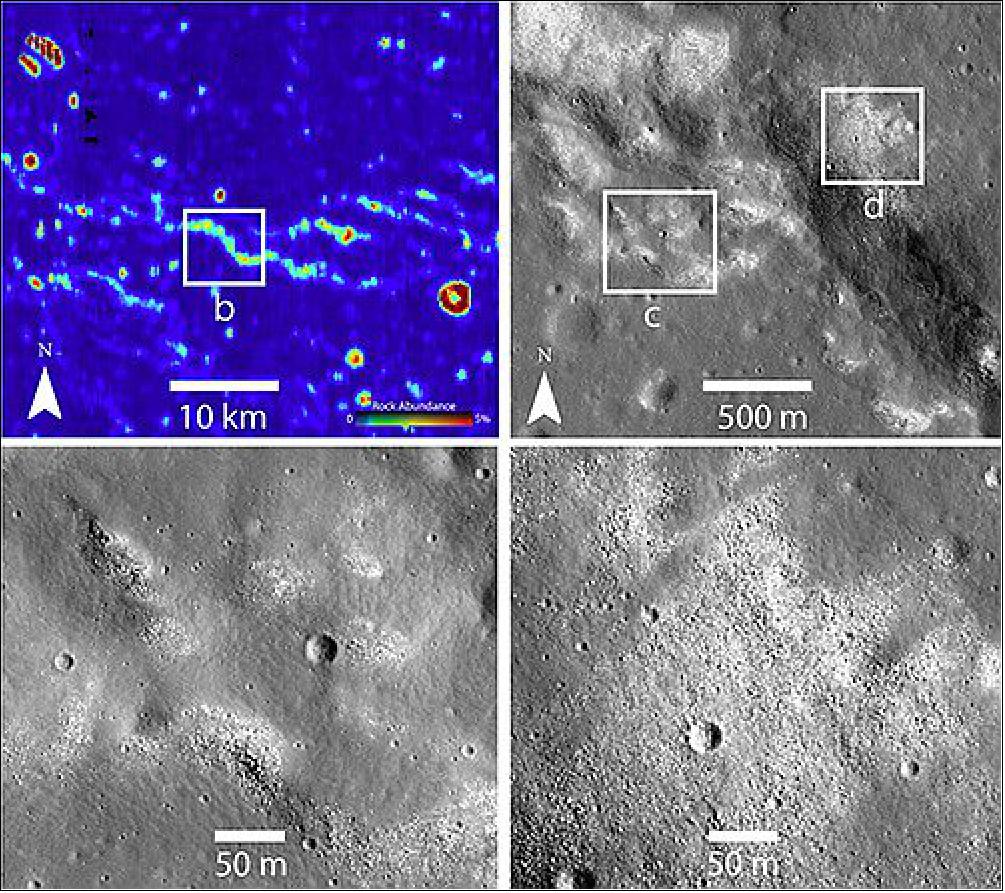
- Most of the Moon’s surface is covered by regolith, a powdery blanket of ground-up rock created by the constant bombardment of tiny meteorites and other impactors. Areas free of regolith where the Moon’s bedrock is exposed are vanishingly rare. But Adomas Valantinas, a graduate student at the University of Bern who led the research while a visiting scholar at Brown, used data from NASA’s Lunar Reconnaissance Orbiter (LRO) to spot strange bare spots within and surrounding the lunar maria, the large dark patches on the Moon’s nearside.
- “Exposed blocks on the surface have a relatively short lifetime because the regolith buildup is happening constantly,” Schultz said. “So when we see them, there needs to be some explanation for how and why they were exposed in certain locations.”
- For the study, Valantinas used the LRO’s Diviner instrument, which measures the temperature of the lunar surface. Just as concrete-covered cities on Earth retain more heat than the countryside, exposed bedrock and blocky surfaces on the Moon stays warmer through the lunar night than regolith-covered surfaces. Using nighttime observations from Diviner, Valantinas turned up more than 500 patches of exposed bedrock on narrow ridges following a pattern across the lunar nearside maria.
- A few ridges topped with exposed bedrock had been seen before, Schultz says. But those ridges were on the edges of ancient lava-filled impact basins and could be explained by continued sagging in response to weight caused by the lava fill. But this new study discovered that the most active ridges are related to a mysterious system of tectonic features (ridges and faults) on the lunar nearside, unrelated to both lava-filled basins and other young faults that crisscross the highlands.
- “The distribution that we found here begs for a different explanation,” Schultz said.
- Valantinas and Schultz mapped out all of the exposures revealed in the Diviner data and found an interesting correlation. In 2014, NASA’s GRAIL mission found a network of ancient cracks in the Moon’s crust. Those cracks became channels through which magma flowed to the Moon’s surface to form deep intrusions. Valantinas and Schultz showed that the blocky ridges seemed to line up just about perfectly with the deep intrusions revealed by GRAIL.
- “It’s almost a one-to-one correlation,” Schultz said. “That makes us think that what we’re seeing is an ongoing process driven by things happening in the Moon’s interior.”
- Schultz and Valantinas suggest that the ridges above these ancient intrusions are still heaving upward. The upward movement breaks the surface and enables regolith to drain into cracks and voids, leaving the blocks exposed. Because bare spots on the Moon get covered over fairly quickly, this cracking must be quite recent, possibly even ongoing today. They refer to what they’ve found as ANTS (Active Nearside Tectonic System).
- The researchers believe that the ANTS was actually set in motion billions of years ago with a giant impact on the Moon’s farside. In previous studies, Schultz and a co-worker proposed this impact, which formed the 1500-mile South Pole Aitken Basin, shattered the interior on the opposite side, the nearside facing the Earth. Magma then filled these cracks and controlled the pattern of dikes detected in the GRAIL mission. The blocky ridges comprising the ANTS now trace the continuing adjustments along these ancient weaknesses.
- “This looks like the ridges responded to something that happened 4.3 billion years ago,” Schultz said. “Giant impacts have long lasting effects. The Moon has a long memory. What we’re seeing on the surface today is testimony to its long memory and secrets it still holds.”
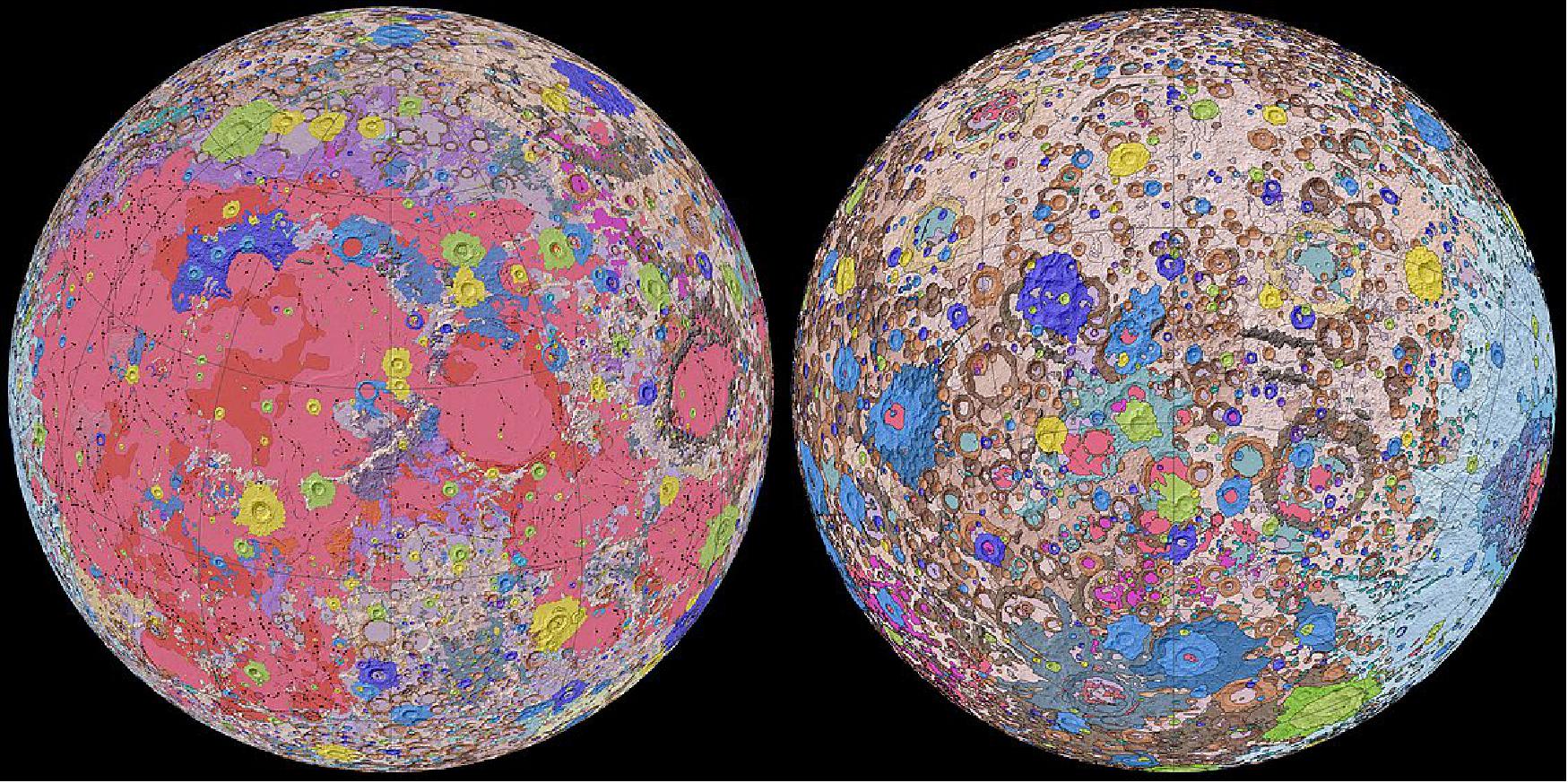
• April 20, 2020: Have you ever wondered what kind of rocks make up those bright and dark splotches on the moon? Well, the USGS (United States Geological Survey) has just released a new authoritative map to help explain the 4.5-billion-year-old history of our nearest neighbor in space. 29)
- For the first time, th entire lunar surface has been completely mapped and uniformly classified by scientists from the USGS Astrogeology Science Center, in collaboration with NASA and the Lunar Planetary Institute.
- The lunar map, called the “Unified Geologic Map of the Moon,” will serve as the definitive blueprint of the moon’s surface geology for future human missions and will be invaluable for the international scientific community, educators and the public-at-large. The digital map is available online now and shows the moon’s geology in incredible detail (1:5,000,000 scale).
- "People have always been fascinated by the moon and when we might return," said current USGS Director and former NASA astronaut Jim Reilly. “So, it’s wonderful to see USGS create a resource that can help NASA with their planning for future missions.”
- To create the new digital map, scientists used information from six Apollo-era regional maps along with updated information from recent satellite missions to the moon. The existing historical maps were redrawn to align them with the modern data sets, thus preserving previous observations and interpretations. Along with merging new and old data, USGS researchers also developed a unified description of the stratigraphy, or rock layers, of the moon. This resolved issues from previous maps where rock names, descriptions and ages were sometimes inconsistent.
- “This map is a culmination of a decades-long project,” said Corey Fortezzo, USGS geologist and lead author. “It provides vital information for new scientific studies by connecting the exploration of specific sites on the moon with the rest of the lunar surface.”
- Elevation data for the moon’s equatorial region came from stereo observations collected by the Terrain Camera on the recent SELENE (Selenological and Engineering Explorer) mission led by JAXA (Japan Aerospace Exploration Agency). Topography for the north and south poles was supplemented with NASA’s LOLA (Lunar Orbiter Laser Altimeter) data on NASA's LRO (Lunar Reconnaissance Orbiter) mission.
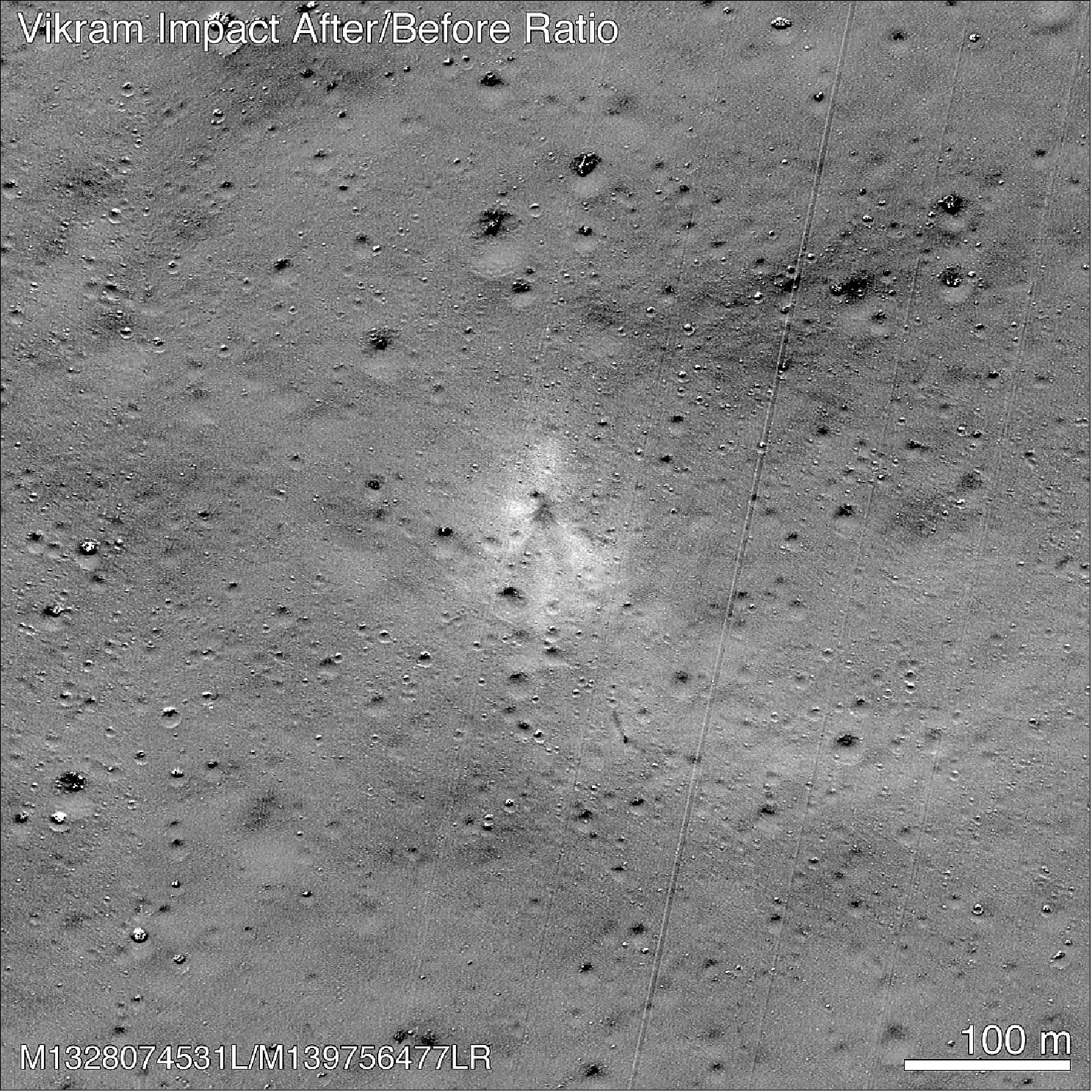
• December 2, 2019: The Chandrayaan-2 Vikram lander of ISRO (Indian Space Research Organization) was targeted for a highland smooth plain about 600 kilometers from the south pole; unfortunately ISRO lost contact with their lander shortly before the scheduled touchdown (Sept. 7 in India, Sept. 6 in the United States). Despite the loss, getting that close to the surface was an amazing achievement. The LROC (Lunar Reconnaissance Orbiter Camera) team released the first mosaic (acquired Sept. 17) of the site on Sept. 26 and many people have downloaded the mosaic to search for signs of Vikram. Shanmuga Subramanian contacted the LRO project with a positive identification of debris. After receiving this tip, the LROC team confirmed the identification by comparing before and after images. When the images for the first mosaic were acquired the impact point was poorly illuminated and thus not easily identifiable. Two subsequent image sequences were acquired on Oct. 14 and 15, and Nov. 11. The LROC team scoured the surrounding area in these new mosaics and found the impact site (70.8810°S, 22.7840°E, 834 m elevation) and associated debris field. The November mosaic had the best pixel scale (0.7 meter) and lighting conditions (72° incidence angle). 30)
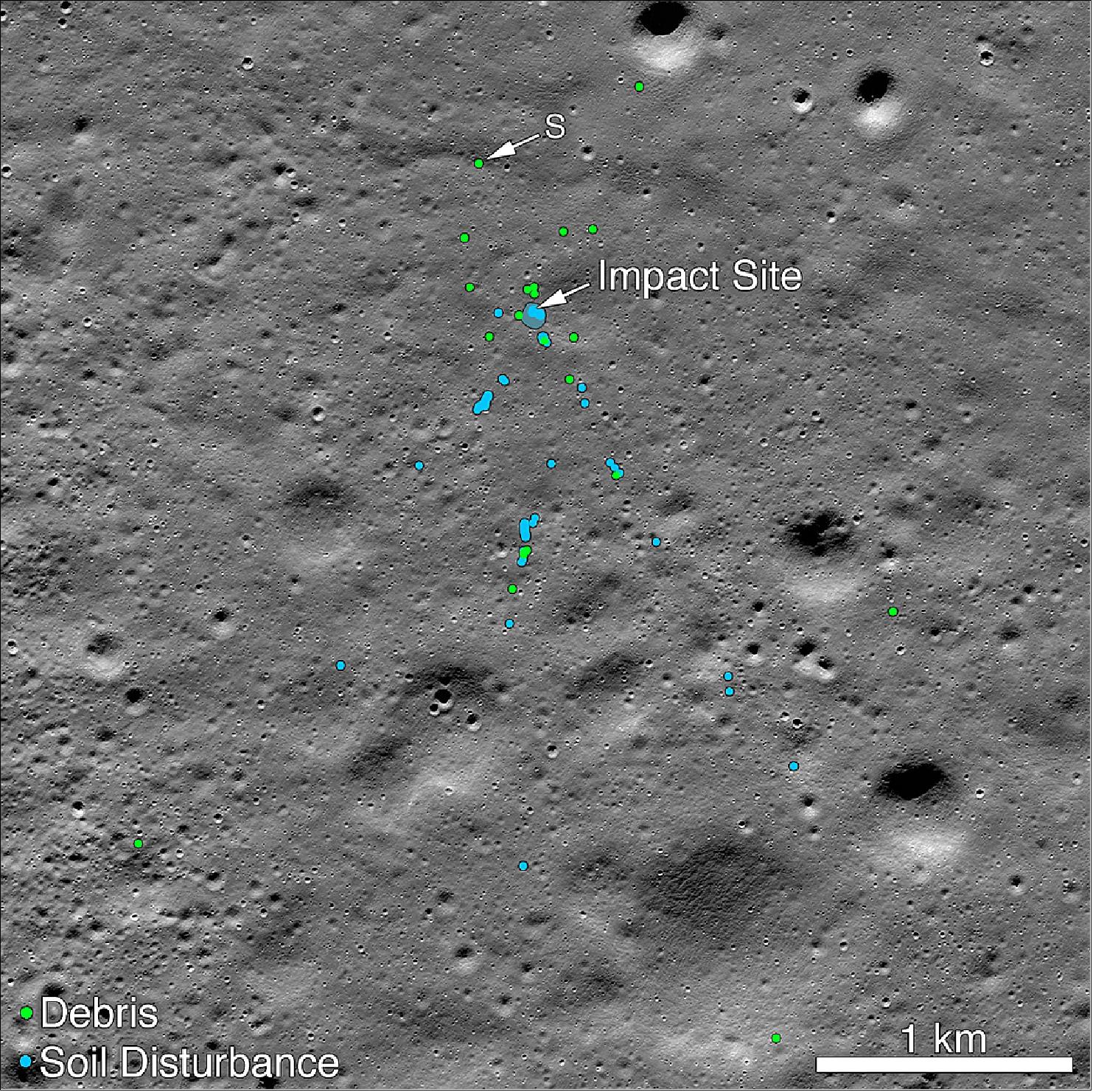
- The debris first located by Shanmuga is about 750 meters northwest of the main crash site and was a single bright pixel identification in that first mosaic (1.3 meter pixels, 84° incidence angle). The November mosaic shows best the impact crater, ray and extensive debris field. The three largest pieces of debris are each about 2 x 2 pixels and cast a one pixel shadow.
• June 18, 2019: As of today, the LRO mission was launched 10 years ago. NASA's Lunar Reconnaissance Orbiter (LRO) was the first U.S. mission to the Moon in over 10 years. LRO’s primary goal was to make a 3D map of the Moon’s surface from lunar polar orbit. LRO continues to orbit the Moon.
In Depth: Lunar Reconnaissance Orbiter 31)
The Lunar Reconnaissance Orbiter (LRO) was launched with the Lunar Crater Observation and Sensing Satellite (LCROSS) on the first U.S. mission to the Moon in over 10 years. Both were part of NASA’s now-canceled Lunar Precursor Robotic Program.
LRO’s primary goal was to make a 3D map of the Moon’s surface from lunar polar orbit as part of a high-resolution mapping program to identify landing sites and potential resources, to investigate the radiation environment, and to prove new technologies in anticipation of future automated and human missions to the surface of the Moon.
The Centaur upper stage boosted both LRO and LCROSS into high apogee orbits soon after launch. At 11:27 UT June 23, 2009, LRO successfully entered orbit around the Moon, having fired its rocket motor on the far side of the Moon. Initial orbital parameters were roughly 19 x 134 miles (30 x 216 km).
A series of four engine firings over the next four days left LRO in its optimal orbit—roughly circular at 50 km—allowing the satellite to begin its primary mission Sept. 25, 2009. The primary mission was expected to last one year and was overseen by NASA’s Exploration Systems Mission Directorate (ESMD).
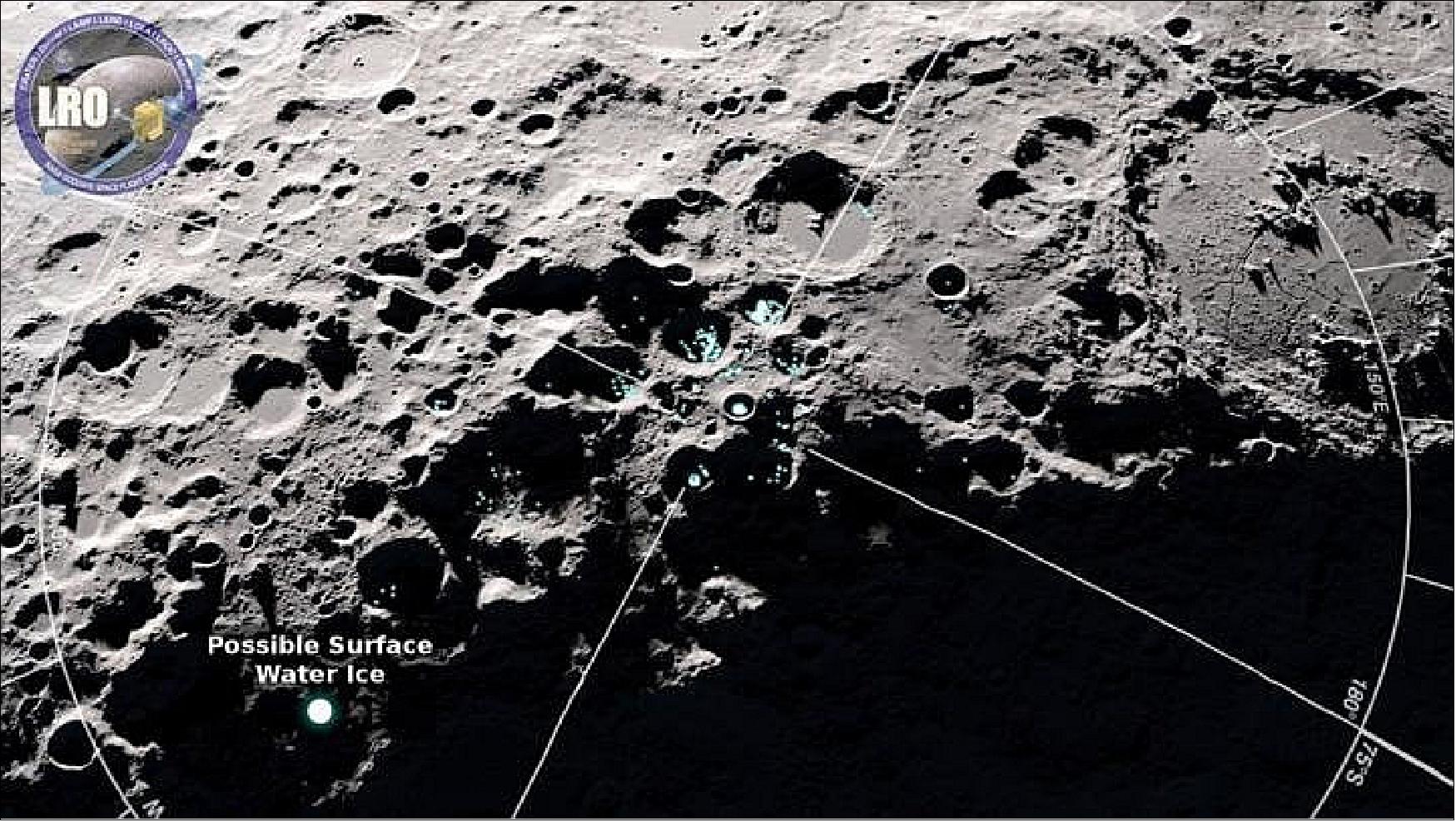
LRO gathered information on day-night temperature maps, contributed data for a global geodetic grid, and conducted high-resolution imaging. The spacecraft paid particular emphasis to the Moon’s polar regions where scientists suspected there might be water in the permanently shadowed areas. (In 2018 a team of scientists directly observed definitive evidence of water ice on the Moon’s surface. At the southern pole, most of the ice is concentrated at lunar craters, while the northern pole’s ice is more widely, but sparsely spread.)
In September 2010, LRO operations were handed over to NASA’s Science Mission Directorate (SMD) to continue the science phase of the mission (rather than activities purely related to exploration and future missions) for another five years.
Among LRO’s achievements was to take extremely high-resolution photographs of landing sites of several older lunar landers and impact vehicles, such as landing sites from all of the Apollo landing missions (plus Surveyor III near the Apollo 12 site) and the Apollo 13, 14, 15 and 17 Saturn IVB upper stages. Other targets included the later Ranger impact probes, and the Soviet Luna 16, 17, 20, 23 and 24 soft-landers, and China’s Chang’e 3 and Chang’e 4 landers and rovers.
In November 2011, NASA released the highest resolution near-topographical map of the Moon ever created, showing surface features over nearly the entire Moon. An interactive mosaic of the lunar north pole was published in March 2014.
LRO also carried out the first demonstration of laser communication with a lunar satellite when, in January 2013, NASA scientists beamed an image of the Mona Lisa from the Next Generation Satellite Laser Ranging (NGSLR) station at NASA’s Goddard Space Flight Center in Greenbelt, Maryland, to the lunar orbiter laser altimeter (LOLA) on LRO.
One of the LRO instruments, the mini-RF partially failed in January 2011, although fortunately, it had already completed its primary science objectives by that time.
On May 4, 2015, controllers at Goddard Space Flight Center sent commands to LRO to fire its engines twice to change its orbit, taking it closer to the Moon than before—a polar orbit of about 20 x 165 km. Perilune, the point at which the spacecraft was closest to the Moon, was near the lunar south pole.
The new orbit allowed LRO’s LOLA instrument to produce better return signals and also allowed it to better measure specific regions near the south pole that have unique illumination conditions.
One of LRO’s more interesting finds was its identification, in December 2015, of the hitherto unknown impact site of Apollo 16’s S-IVB upper stage that was deliberately impacted on the lunar surface in 1972.
During the total solar eclipse Aug. 21, 2017, LRO, captured an image of the Moon’s shadow over a large region of the U.S., centered just north of Nashville, Tennessee.
In May 2018, due to evidence that LRO’s inertial measurement unit (IMU) was nearing the end of its life, the LRO team powered down the unit to reserve its remaining life for highly critical events, such as lunar eclipses and safe mode entries. The IMU contains a set of three ring laser gyroscopes which are used to measure the rotation of the spacecraft in each of three axes.
In March 2019, scientists reported they had used LRO’s Lyman-Alpha mapping project (LAMP) to observe water molecules moving around the dayside of the Moon. The measurements helped characterize lunar hydration changes over the course of a day.
Firsts
• Provided data for the highest resolution near-topographical map of the Moon to date
• Carried out the first demonstration of laser communication with a lunar satellite
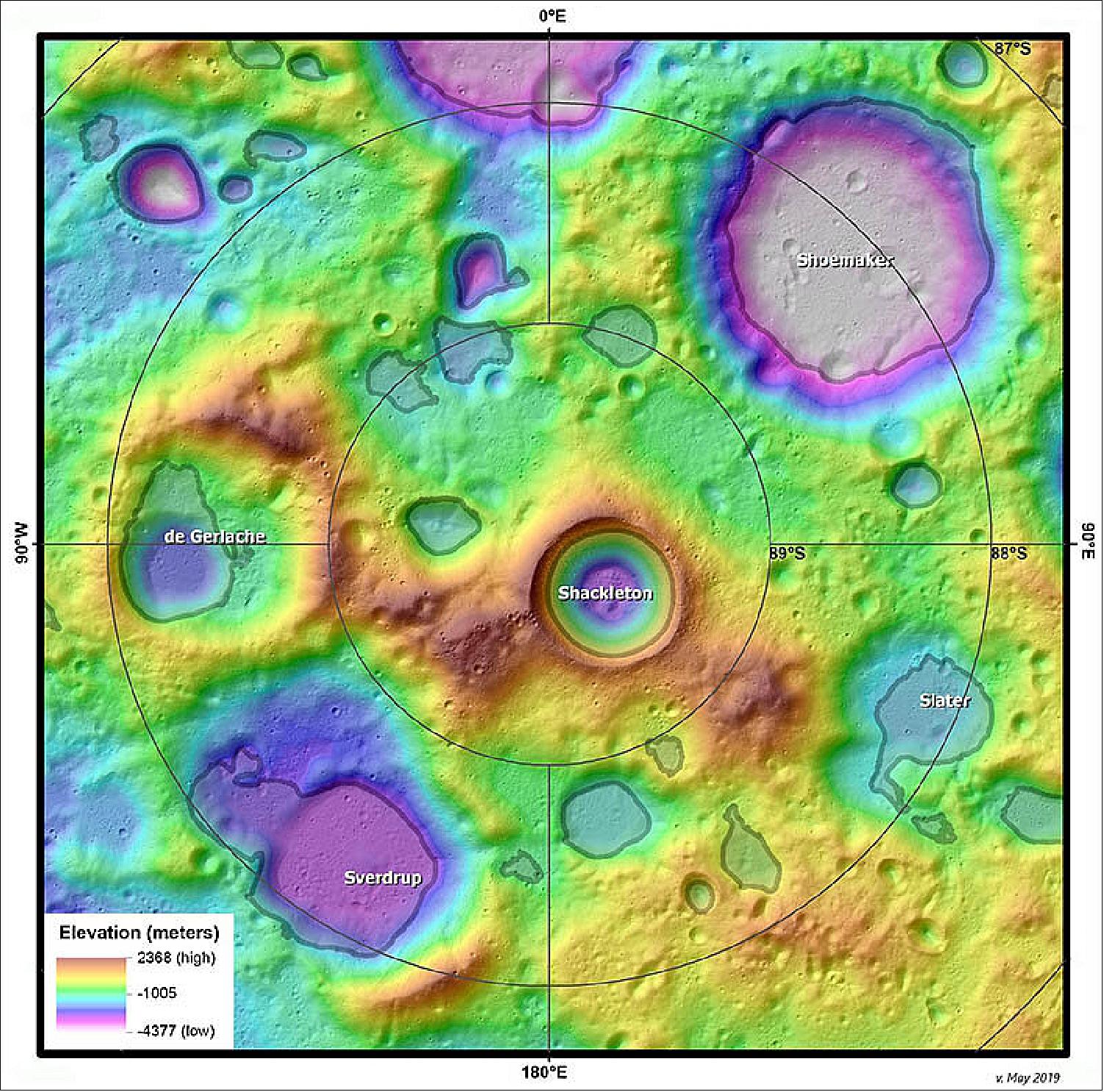
• May 17, 2019: The Lunar and Planetary Institute (LPI), managed by Universities Space Research Association (USRA), has compiled and made available an atlas of the Moon's south pole. Given NASA's recent direction to implement Space Policy Directive-1 landing astronauts at the south pole by 2024, the LPI has compiled a series of maps, images, and illustrations designed to provide context and reference for those interested in exploring this area. 32) 33)
- The highlight of the new online atlas is a set of 14 topographic maps derived from Lunar Reconnaissance Orbiter (LRO) data. Dr. Julie D. Stopar, USRA staff scientist and director of the Regional Planetary Image Facility (RPIF) at the LPI, utilized these data to generate a series of south pole maps that can be used to visualize the terrain near the south pole.
- "There are many exciting places to explore on the Moon, but the south pole has long held promise for a sustainable human presence," says Dr. Stopar. "This collection can assist mission planners in this new era of south pole exploration."
- LRO has been in orbit collecting data since late June 2009—almost a decade. LRO is in a polar orbit, meaning that it passes near the poles multiple times each day, resulting in many opportunities to study the south pole over the entire mission. As a result, there is an abundance of topographic data and images already available from the poles, including several digital elevation models derived from LRO's Lunar Orbiter Laser Altimeter (LOLA) instrument. These data are freely available in NASA's Planetary Data System.
- The temperatures and illumination conditions at the lunar poles are dependent on local topography. At the poles, the Sun never rises much beyond a degree from the horizon, creating long shadows cast from topographically elevated areas. Over the course of a year, the Sun will appear to move around the lunar horizon, changing the angle and extent of the shadows. However, some areas near the poles, particularly those in low topographic areas are always in shadow, never receiving direct sunlight. These areas are permanently shadowed and very cold – so cold that volatiles like water-ice become trapped there. Water-ice trapped near the lunar poles is particularly of interest for future explorers, as it may serve as a ready source of breathable air, drinkable water, and spacecraft propellant. The new south pole maps can be used to identify and characterize topographically elevated (and illuminated) areas as well as permanently shadowed areas.
- Other content in the new atlas is drawn from the LPI's RPIF collection of lunar images and maps, and LPI's library of classroom illustrations. Links to additional data products derived from recent and ongoing planetary missions are also included.
• May 13, 2019: Billions of years ago, Earth's Moon formed vast basins called "mare" (pronounced MAR-ay). Scientists have long assumed these basins were dead, still places where the last geologic activity occurred long before dinosaurs roamed Earth. 34)
- But a survey of more than 12,000 images reveals that at least one lunar mare has been cracking and shifting as much as other parts of the Moon - and may even be doing so today. The study adds to a growing understanding that the Moon is an actively changing world.
- Taken by NASA's Lunar Reconnaissance Orbiter Camera (LROC), the images reveal "wrinkle ridges" - curved hills and shallow trenches created by a lunar surface that is contracting as the Moon loses heat and shrinks. The features are described in a study published in Icarus on March 7, 2019, and led by Nathan Williams, a post-doctoral researcher at NASA's Jet Propulsion Laboratory in Pasadena, California.
- Previous research has found similar surface features in the Moon's highlands, but wrinkle ridges have never been seen in basins before now. For this study, Williams and his co-authors focused on a region near the Moon's north pole called Mare Frigoris, or the Cold Sea.
- The study estimates that some of the ridges emerged in the last billion years, while others may be no older than 40 million years old. That's relatively fresh in geologic terms; previous studies have estimated these basins all stopped contracting about 1.2 billion years ago.
- Both Earth and its Moon experience what's known as tectonics, processes that push up mountains, rip apart land masses and create quakes. On Earth, these processes occur constantly as the planet's mantle causes pieces of crust, called plates, to shift against one another. The Moon doesn't have tectonic plates; instead, its tectonic action occurs as the Moon slowly loses heat from when it was formed nearly 4.5 billion years ago. The heat loss causes its interior to shrink, crinkling the surface and creating distinctive features like those identified in the study.
- "The Moon is still quaking and shaking from its own internal processes," Williams said. "It's been losing heat over billions of years, shrinking and becoming denser."
- The effect is similar to a car tire in winter: As the temperature drops, air inside the tire contracts and creates a squishier surface.
Evidence of a Shrinking Moon
- The Moon's tectonic action is especially visible in Mare Frigoris. By poring over more than 12,000 images taken by LRO's camera, Williams and his co-authors identified thousands of tectonically created features.
- As the ground under Mare Frigoris shifts, it pushes up wrinkle ridges, which typically snake along the ground for several miles. The longest ones stretch about 250 miles (400 km) - greater than the distance between New York City and Washington, D.C. - and rise as much as 1,000 feet (333 m). Tectonic pushing and pulling of the lunar crust also sculpt curved hills called lobate scarps and shallow trenches known as graben.
- Geologists can date them by studying another common lunar feature: impact craters. The longer a surface is struck by meteors, the more debris gets flung up from the impacts and covers nearby terrain, altering the landscape in a process called "impact gardening."
- Craters collect more debris the longer they are around. The smaller they are, the less time they take to fill: Craters smaller than the size of a football field would typically fill to the brim in under a billion years. LROC's images revealed crisp tectonic features like the wrinkle ridges that formed after - and cut through - small, unfilled craters. That allowed Williams and his co-authors to deduce that the ridges emerged within the past billion years or so.
From Moonquakes to Marsquakes
- Studying seismic activity on the Moon isn't new. The Apollo astronauts brought several seismometers to the lunar surface, which recorded thousands of moonquakes between 1969 and 1977. The vast majority were quakes that occurred deep in the Moon's interior; a smaller number were determined to be of shallow depth, occurring in the lunar crust.
- A new paper in Nature Geoscience takes another look at these shallow moonquakes and establishes connections to some very young surface features called lobate thrust fault scarps. This opens the door to looking for similar connections with young wrinkle ridges described in the Icarus study. 35)
- Scientists - including Williams - now hope to glean similar science from Mars. NASA's InSight lander recently detected what is likely its first marsquake, along with several other seismic signals. The way a quake's seismic waves travel inside a planet can tell geologists about how rocky bodies are layered. That, in turn, can deepen our understanding of how Earth, its Moon and Mars first formed.

• March 8, 2019: Using the LAMP (Lyman Alpha Mapping Project) instrument of SwRI aboard NASA's LRO mission, scientists have observed water molecules moving around the dayside of the Moon. A paper published in Geophysical Research Letters describes how LAMP measurements of the sparse layer of molecules temporarily stuck to the surface helped characterize lunar hydration changes over the course of a day. 36) 37)
- Up until the last decade or so, scientists thought the Moon was arid, with any water existing mainly as pockets of ice in permanently shaded craters near the poles. More recently, scientists have identified surface water in sparse populations of molecules bound to the lunar soil, or regolith. The amount and locations vary based on the time of day. This water is more common at higher latitudes and tends to hop around as the surface heats up.
- “This is an important new result about lunar water, a hot topic as our nation’s space program returns to a focus on lunar exploration,” said SwRI’s Dr. Kurt Retherford, the principal investigator of the LRO LAMP instrument. “We recently converted the LAMP’s light collection mode to measure reflected signals on the lunar dayside with more precision, allowing us to track more accurately where the water is and how much is present.”
- Water molecules remain tightly bound to the regolith until surface temperatures peak near lunar noon. Then, molecules thermally desorb and can bounce to a nearby location that is cold enough for the molecule to stick or populate the Moon's extremely tenuous atmosphere, or "exosphere," until temperatures drop and the molecules return to the surface. SwRI's Dr. Michael Poston, now a research scientist on the LAMP team, had previously conducted extensive experiments with water and lunar samples collected by the Apollo missions. This research revealed the amount of energy needed to remove water molecules from lunar materials, helping scientists understand how water is bound to surface materials.
- "Lunar hydration is tricky to measure from orbit, due to the complex way that light reflects off of the lunar surface," Poston said. "Previous research reported quantities of hopping water molecules that were too large to explain with known physical processes. I'm excited about these latest results because the amount of water interpreted here is consistent with what lab measurements indicate is possible. More work is needed to fully account for the complexities of the lunar surface, but the present results show that work is definitely worth doing!"
- Scientists have hypothesized that hydrogen ions in the solar wind may be the source of most of the Moon's surface water. With that in mind, when the Moon passes behind the Earth and is shielded from the solar wind, the "water spigot" should essentially turn off. However, the water observed by LAMP does not decrease when the Moon is shielded by the Earth and the region influenced by its magnetic field, suggesting water builds up over time, rather than "raining" down directly from the solar wind.
- "These results aid in understanding the lunar water cycle and will ultimately help us learn about accessibility of water that can be used by humans in future missions to the Moon," said Amanda Hendrix, a senior scientist at the PSI (Planetary Science Institute) and lead author of the paper. "A source of water on the Moon could help make future crewed missions more sustainable and affordable. Lunar water can potentially be used by humans to make fuel or to use for radiation shielding or thermal management; if these materials do not need to be launched from Earth, that makes these future missions more affordable."
- The funding for this research came from NASA Goddard Space Flight Center's LRO program office, including an LRO LAMP subcontract between SwRI and PSI, and the team received additional support from a NASA Solar System Exploration Research Virtual Institute (SSERVI) cooperative agreement.
• January 17, 2019: By looking at the Moon, the most complete and accessible chronicle of the asteroid collisions that carved our young solar system, a group of scientists is challenging our understanding of a part of Earth’s history. 38)
- The number of asteroid impacts to the Moon and Earth increased by two to three times starting around 290 million years ago, researchers reported in a paper in the journal Science. 39)
- They could tell by creating the first comprehensive timeline of large craters on the Moon formed in the last billion years by using images and thermal data collected by NASA’s LRO (Lunar Reconnaissance Orbiter). When the scientists compared those to the timeline of Earth’s craters, they found the two bodies had recorded the same history of asteroid bombardment—one that contradicts theories about Earth’s impact rate.
- For decades, scientists have tried to understand the rate that asteroids hit the Earth by carefully studying impact craters on continents and by using radiometric dating of the rocks around them to determine the ages of the largest, and thus most intact, ones. The problem is that many experts assumed that early Earth craters have been worn away by wind, storms, and other geologic processes. This idea explained why Earth has fewer older craters than expected compared to other bodies in the solar system, but it made it difficult to find an accurate impact rate and to determine whether it had changed over time.
- A way to sidestep this problem is to examine the Moon. Earth and the Moon are hit in the same proportions over time. In general, because of its larger size and higher gravity, about twenty asteroids strike Earth for every one that strikes the Moon, though large impacts on either body are rare. But even though large lunar craters have experienced little erosion over billions of years, and thus offer scientists a valuable record, there was no way to determine their ages until the Lunar Reconnaissance Orbiter started circling the Moon a decade ago and studying its surface.
- “We’ve known since the Apollo exploration of the Moon 50 years ago that understanding the lunar surface is critical to revealing the history of the solar system,” said Noah Petro, an LRO project scientist based at NASA Goddard Space Flight Center in Greenbelt, Maryland. LRO, along with new commercial robotic landers under development with NASA, said Petro, will inform the development and deployment of future landers and other exploration systems needed for humans to return to the Moon's surface and to help prepare the agency to send astronauts to explore Mars. Achieving NASA’s exploration goals is dependent on the agency’s science efforts, which will contribute to the capabilities and knowledge that will enable America’s Moon to Mars exploration approach now and in the future.
- “LRO has proved an invaluable science tool," said Petro. "One thing its instruments have allowed us to do is peer back in time at the forces that shaped the Moon; as we can see with the asteroid impact revelation, this has led to groundbreaking discoveries that have changed our view of Earth.”
The Moon as Earth's Mirror
- LRO's thermal radiometer, called Diviner, has taught scientists how much heat is radiating off the Moon’s surface, a critical factor in determining crater ages. By looking at this radiated heat during the lunar night, scientists can calculate how much of the surface is covered by large, warm rocks, versus cooler, fine-grained regolith, also known as lunar soil.
- Large craters formed by asteroid impacts in the last billion years are covered by boulders and rocks, while older craters have few rocks, Diviner data showed. This happens because impacts excavate lunar boulders that are ground into soil over tens to hundreds of millions of years by a constant rain of tiny meteorites.
- Paper co-author Rebecca Ghent, a planetary scientist at University of Toronto and the Planetary Science Institute in Tucson, Arizona, calculated in 2014 the rate at which Moon rocks break down into soil. Her work thus revealed a relationship between an abundance of large rocks near a crater and the crater’s age. Using Ghent’s technique, the team assembled a list of ages of all lunar craters younger than about a billion years.
- “It was a painstaking task, at first, to look through all of these data and map the craters out without knowing whether we would get anywhere or not,” said Sara Mazrouei, the lead author of the Science paper who collected and analyzed all the data for this project while a Ph.D. student at the University of Toronto.
- The work paid off, returning several unexpected findings. First, the team discovered that the rate of large crater formation on the Moon has been two to three times higher over approximately the last 290 million years than it had been over the previous 700 million years. The reason for this jump in the impact rate is unknown. It might be related to large collisions taking place more than 300 million years ago in the main asteroid belt between the orbits of Mars and Jupiter, the researchers noted. Such events can create debris that can reach the inner solar system.
- The second surprise came from comparing the ages of large craters on the Moon to those on Earth. Their similar number and ages challenges the theory that Earth had lost so many craters through erosion that an impact rate could not be calculated.
- “The Earth has fewer older craters on its most stable regions not because of erosion, but because the impact rate was lower about 290 million years ago,” said William Bottke, an asteroid expert at the Southwest Research Institute in Boulder, Colorado and a co-author of the paper. “This meant the answer to Earth’s impact rate was staring everyone right in the face.”
- Proving that fewer craters meant fewer impacts—rather than loss through erosion—posed a formidable challenge. Yet the scientists found strong supporting evidence for their findings through a collaboration with Thomas Gernon, an Earth scientist based at the University of Southampton in England who works on a terrestrial feature called kimberlite pipes.
- These underground pipes are long-extinct volcanoes that stretch, in a carrot shape, a couple of kilometers below the surface. Scientists know a lot about the ages and rate of erosion of kimberlite pipes because they are widely mined for diamonds. They also are located on some of the least eroded regions of Earth, the same places we find preserved impact craters.
- Gernon showed that kimberlite pipes formed since about 650 million years ago had not experienced much erosion, indicating that the large impact craters younger than this on stable terrains must also be intact. “So that's how we know those craters represent a near-complete record,” Ghent said.
- Ghent’s team, which also included Southwest Research Institute planetary astronomer Alex Parker, wasn’t the first to propose that the rate of asteroid strikes to Earth has fluctuated over the past billion years. But it was the first to show it statistically and to quantify the rate. Now the team’s technique can be used to study the surfaces of other planets to find out if they might also show more impacts.
- The team’s findings related to Earth, meanwhile, may have implications for the history of life, which is punctuated by extinction events and rapid evolution of new species. Though the forces driving these events are complicated and may include other geologic causes, such as large volcanic eruptions, combined with biological factors, the team points out that asteroid impacts have surely played a role in this ongoing saga. The question is whether the predicted change in asteroid impacts can be directly linked to events that occurred long ago on Earth.
- This research was funded in part by NASA’s Solar System Exploration Research Virtual Institute (SSERVI). Researchers at the Southwest Research Institute are part of 13 teams within SSERVI, based and managed at NASA’s Ames Research Center in California’s Silicon Valley. SSERVI is funded by the Science Mission Directorate and Human Exploration and Operations Mission Directorate at NASA Headquarters in Washington, DC.

• December 10, 2018: The LRO spacecraft is operational and has about 20 kg of fuel left on board, Noah Petro, LRO project scientist, said at a meeting of the Lunar Exploration Analysis Group (LEAG) Nov. 15. “That may not seem like a lot, but we don’t go through much fuel on an annual basis,” he said, primarily to manage the spacecraft’s momentum and make minor orbit adjustments. 40)
- “All told, we have approximately seven years of fuel remaining,” he said. That could decrease, he said, if the spacecraft performs additional maneuvers, such as to phase its orbit to observe specific activities like lunar landings.
- Petro said that LRO will receive funding in fiscal year 2019 from the Commercial Lunar Payload Services (CLPS) program, where NASA will buy payload space on commercially developed landers. NASA announced on 29 November that it awarded contracts to nine companies working on such landers, although those companies will later have to compete for task orders to fly specific payloads, such as scientific instruments.
- NASA is offering LRO to assist those future commercial landers. “The LRO team is standing ready to help,” said Barbara Cohen, LRO associate project scientist, at the 29 November announcement. That can include identifying sites close to potential resources or have high scientific value while also being safe locations for spacecraft landings.
- That can include observations of the landing themselves. “We are working with some upcoming missions to try to pick landing dates that have favorable viewing geometries” that would allow LRO to observe the landings as they happen, she said. “We want to observe the plumes as the landers land and kick up dust and disturb the environment.”
- LRO is also supporting other lunar missions outside of the CLPS program. At the LEAG meeting, John Keller, deputy project scientist for LRO, noted that the mission is helping international missions, including imaging sites for proposed future missions by Europe, India, Japan and Russia.
- This includes two upcoming missions scheduled to attempt lunar landings next year. Keller said LRO is studying options of observing the landing of SpaceIL’s lander, developed by an Israeli team that competed in the now-defunct Google Lunar X Prize, and India’s Chandrayaan-2 lander, both targeting landings between March and May 2019.
- For future commercial missions, Keller said that LRO planned to be “proactive” and reach out to the individual companies. “We will go out and say, ‘Look, let us help you understand the LRO data set, how to use it and how it can it can help you be successful,’” he said. That could lead to discussions on how to further support those missions.
• April 11, 2018: Images from NASA's LRO are not only helping planners with future human missions to the moon, but they are also revealing new information about the moon's evolution and structure. 41)
- LRO has been circling the moon since 2009 and has made a range of discoveries at Earth's closest large celestial neighbor.
- The orbiter has found regions of possible ice in permanently shadowed regions of the moon, inside sheltered craters and caves. It provides elevation data and mineralogical mapping to help scientists better understand the age of craters, lava basins and other features on the moon. And it also acts as a scout for future human missions. That role came into focus late in 2017, when the Trump administration tasked NASA with heading back to the moon before journeying to Mars.
- Future landing missions could take advantage of mountain peaks or crater rims at the moon's north pole, the video's narrator explains during the lunar tour. LRO scientists have modeled the sunlight in these regions across centuries of time. By zooming in on the spots with consistent sun exposure, mission planners can put solar panels there to support future human missions.
• March 15, 2018: It might sound like something from a science fiction plot – astronauts traveling into deep space being bombarded by cosmic rays – but radiation exposure is science fact. As future missions look to travel back to the moon or even to Mars, new research from the University of New Hampshire's Space Science Center cautions that the exposure to radiation is much higher than previously thought and could have serious implications on both astronauts and satellite technology. *42)
- "The radiation dose rates from measurements obtained over the last four years exceeded trends from previous solar cycles by at least 30 percent, showing that the radiation environment is getting far more intense," said Nathan Schwadron, professor of physics and lead author of the study. "These particle radiation conditions present important environmental factors for space travel and space weather, and must be carefully studied and accounted for in the planning and design of future missions to the moon, Mars, asteroids and beyond."
- In their study, recently published in the journal Space Weather, the researchers found that large fluxes in GRCs (Galactic Cosmic Rays) are rising faster and are on path to exceed any other recorded time in the space age. They also point out that one of the most significant SEP (Solar Energetic Particle) events happened in September 2017 releasing large doses of radiation that could pose significant risk to both humans and satellites. Unshielded astronauts could experience acute effects like radiation sickness or more serious long-term health issues like cancer and organ damage, including to the heart, brain, and central nervous system. 43)
- In 2014, Schwadron and his team predicted around a 20 percent increase in radiation dose rates from one solar minimum to the next. Four years later, their newest research shows current conditions exceed their predictions by about 10 percent, showing the radiation environment is worsening even more than expected. ”We now know that the radiation environment of deep space that we could send human crews into at this point is quite different compared to that of previous crewed missions to the moon," says Schwadron.
- The authors used data from CRaTER on NASA's LRO (Lunar Reconnaissance Orbiter). Lunar observations (and other space-based observations) show that GCR radiation doses are rising faster than previously thought. Researchers point to the abnormally long period of the recent quieting of solar activity. In contrast, an active sun has frequent sunspots, which can intensify the sun's magnetic field. That magnetic field is then dragged out through the solar system by the solar wind and deflects galactic cosmic rays away from the solar system – and from any astronauts in transit.
- For most of the space age, the sun's activity ebbed and flowed like clockwork in 11-year cycles, with six- to eight-year lulls in activity, called solar minimum, followed by two- to three-year periods when the sun is more active. However, starting around 2006, scientists observed the longest solar minimum and weakest solar activity observed during the space age.
- Despite this overall reduction, the September 2017 solar eruptions produced episodes of significant Solar Particle Events and associated radiation caused by particle acceleration by successive, magnetically well-connected coronal mass ejections. The researchers conclude that the radiation environment continues to pose significant hazards associated both with historically large galactic cosmic ray fluxes and large but isolated SEP events, which still challenge space weather prediction capabilities.
• February 23, 2018: A new analysis of data from two lunar missions finds evidence that the Moon’s water is widely distributed across the surface and is not confined to a particular region or type of terrain. The water appears to be present day and night, though it’s not necessarily easily accessible. 44)
- The findings could help researchers understand the origin of the Moon’s water and how easy it would be to use as a resource. If the Moon has enough water, and if it’s reasonably convenient to access, future explorers might be able to use it as drinking water or to convert it into hydrogen and oxygen for rocket fuel or oxygen to breathe.
- “We find that it doesn’t matter what time of day or which latitude we look at, the signal indicating water always seems to be present,” said Joshua Bandfield, a senior research scientist with the Space Science Institute in Boulder, Colorado, and lead author of the new study published in Nature Geoscience. “The presence of water doesn’t appear to depend on the composition of the surface, and the water sticks around.” 45)
- Analyses of data from the M3 (Moon Mineralogy Mapper) spectrometer onboard the Chandrayaan-1 spacecraft have suggested that OH/H2O is recycled on diurnal timescales and persists only at high latitudes. However, the spatial distribution and temporal variability of the OH/H2O, as well as its source, remain uncertain.
- The results contradict some earlier studies, which had suggested that more water was detected at the Moon’s polar latitudes and that the strength of the water signal waxes and wanes according to the lunar day (29.5 Earth days). Taking these together, some researchers proposed that water molecules can “hop” across the lunar surface until they enter cold traps in the dark reaches of craters near the north and south poles. In planetary science, a cold trap is a region that’s so cold, the water vapor and other volatiles which come into contact with the surface will remain stable for an extended period of time, perhaps up to several billion years.
- The debates continue because of the subtleties of how the detection has been achieved so far. The main evidence has come from remote-sensing instruments that measured the strength of sunlight reflected off the lunar surface. When water is present, instruments like these pick up a spectral fingerprint at wavelengths near 3 micrometers, which lies beyond visible light and in the realm of infrared radiation.
- But the surface of the Moon also can get hot enough to “glow,” or emit its own light, in the infrared region of the spectrum. The challenge is to disentangle this mixture of reflected and emitted light. To tease the two apart, researchers need to have very accurate temperature information.
- Bandfield and colleagues came up with a new way to incorporate temperature information, creating a detailed model from measurements made by the Diviner instrument on NASA’s LRO (Lunar Reconnaissance Orbiter). The team applied this temperature model to data gathered earlier by the M3 (Moon Mineralogy Mapper), a visible and infrared spectrometer that NASA’s Jet Propulsion Laboratory in Pasadena, California, provided for India’s Chandrayaan-1 orbiter.
- The new finding of widespread and relatively immobile water suggests that it may be present primarily as OH, a more reactive relative of H2O that is made of one oxygen atom and one hydrogen atom. OH, also called hydroxyl, doesn’t stay on its own for long, preferring to attack molecules or attach itself chemically to them. Hydroxyl would therefore have to be extracted from minerals in order to be used.
- The research also suggests that any H2O present on the Moon isn’t loosely attached to the surface.
- “By putting some limits on how mobile the water or the OH on the surface is, we can help constrain how much water could reach the cold traps in the polar regions,” said Michael Poston of the SwRI (Southwest Research Institute) in San Antonio, Texas.
- Sorting out what happens on the Moon could also help researchers understand the sources of water and its long-term storage on other rocky bodies throughout the solar system.
- The researchers are still discussing what the findings tell them about the source of the Moon’s water. The results point toward OH and/or H2O being created by the solar wind hitting the lunar surface, though the team didn’t rule out that OH and/or H2O could come from the Moon itself, slowly released from deep inside minerals where it has been locked since the Moon was formed.
- “Some of these scientific problems are very, very difficult, and it’s only by drawing on multiple resources from different missions that are we able to hone in on an answer,” said LRO project scientist John Keller of NASA’s Goddard Space Flight Center in Greenbelt, Maryland.

• May 26, 2017: Something very strange happened to the camera aboard NASA’s LRO (Lunar Reconnaissance Orbiter) on October 13, 2014. LROC (Lunar Reconnaissance Orbiter Camera), which normally produces beautifully clear images of the lunar surface, produced an image that was wild and jittery. From the sudden and jagged pattern apparent in the image (Figure 33), the LROC team determined that the camera must have been hit by a tiny meteoroid, a small natural object in space. 46)
- LROC is a system of three cameras mounted on the LRO spacecraft. Two NACs (Narrow Angle Cameras) capture high resolution black and white images. The third WAC (Wide Angle Camera) captures moderate resolution images using filters to provide information about the properties and color of the lunar surface.
- The NAC works by building an image one line at a time. The first line is captured, then the orbit of the spacecraft moves the camera relative to the surface, and then the next line is captured, and so on, as thousands of lines are compiled into a full image.
- According to Mark Robinson, professor and principal investigator of LROC at ASU’s School of Earth and Space Exploration, the jittery appearance of the image captured is the result of a sudden and extreme cross-track oscillation of the camera. LROC researchers concluded that there must have been a brief violent movement of the left Narrow Angle Camera.
- There were no spacecraft events like solar panel movements or antenna tracking that might have caused spacecraft jitter during this period. “Even if there had been, the resulting jitter would have affected both cameras identically,” says Robinson. “The only logical explanation is that the NAC was hit by a meteoroid.”
How big was the meteoroid?
During LROC’s development, a detailed computer model was made to insure the NAC would not fail during the severe vibrations caused by the launch of the spacecraft. The computer model was tested before launch by attaching the NAC to a vibration table that simulated launch. The camera passed the test with flying colors, proving its stability.
Using this detailed computer model, the LROC team ran simulations to see if they could reproduce the distortions seen on the Oct. 13 image and determine the size of the meteoroid that hit the camera. They estimate the impacting meteoroid would have been about half the size of a pinhead (0.8 mm), assuming a velocity of about7 km/s and a density of an ordinary chondrite meteorite (2.7 gram/cm3).
“The meteoroid was traveling much faster than a speeding bullet,” says Robinson. “In this case, LROC did not dodge a speeding bullet, but rather survived a speeding bullet!”
How rare is it that the effects of an event like this were captured on camera? Very rare, according to Robinson. LROC typically only captures images during daylight and then only about 10 percent of the day, so for the camera to be hit by a meteor during the time that it was also capturing images is statistically unlikely. “LROC was struck and survived to keep exploring the moon,” says Robinson, “thanks to Malin Space Science Systems’ robust camera design.”
“Since the impact presented no technical problems for the health and safety of the instrument, the team is only now announcing this event as a fascinating example of how engineering data can be used, in ways not previously anticipated, to understand what is happening to the spacecraft over 380,000 km from the Earth," said John Keller, LRO project scientist from NASA’s Goddard Space Flight Center in Greenbelt, Maryland.
Launched on June 18, 2009, LRO has collected a treasure trove of data with its seven powerful instruments, making an invaluable contribution to our knowledge about the moon.
“A meteoroid impact on the LROC NAC reminds us that LRO is constantly exposed to the hazards of space,” says Noah Petro, deputy project scientist from NASA Goddard. “And as we continue to explore the moon, it reminds us of the precious nature of the data being returned.”
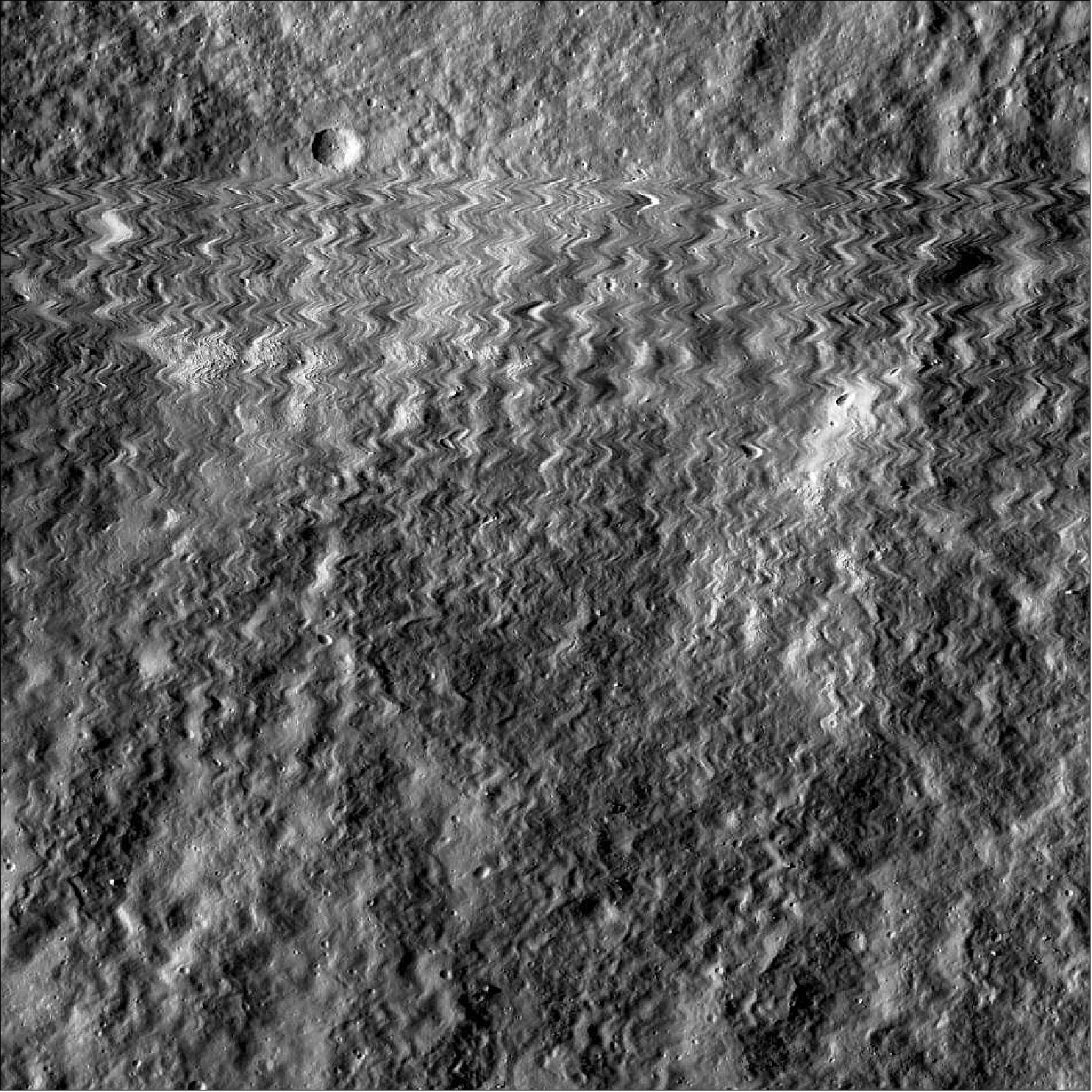
• January 28, 2017: LRO is currently in its third extended mission, which lasts until October 2018, at which point the project will have proposed to extend the mission for two more years. Having launched in June 2009, LRO has orbited the Moon longer than any other operational mission. This extended baseline of measurements by its seven instruments allows for unprecedented measurements of the lunar surface and environment and their variability. 47)
• January 6, 2017: Powerful solar storms can charge up the soil in frigid, permanently shadowed regions near the lunar poles, and may possibly produce "sparks" that could vaporize and melt the soil, perhaps as much as meteoroid impacts, according to NASA-funded research. This alteration may become evident when analyzing future samples from these regions that could hold the key to understanding the history of the moon and solar system. 48)
- The moon has almost no atmosphere, so its surface is exposed to the harsh space environment. Impacts from small meteoroids constantly churn or "garden" the top layer of the dust and rock, called regolith, on the moon. "About 10 percent of this gardened layer has been melted or vaporized by meteoroid impacts," said Andrew Jordan of the University of New Hampshire, Durham. "We found that in the moon’s permanently shadowed regions, sparks from solar storms could melt or vaporize a similar percentage." Jordan is lead author of a paper on this research published online in Icarus August 31, 2016. 49)
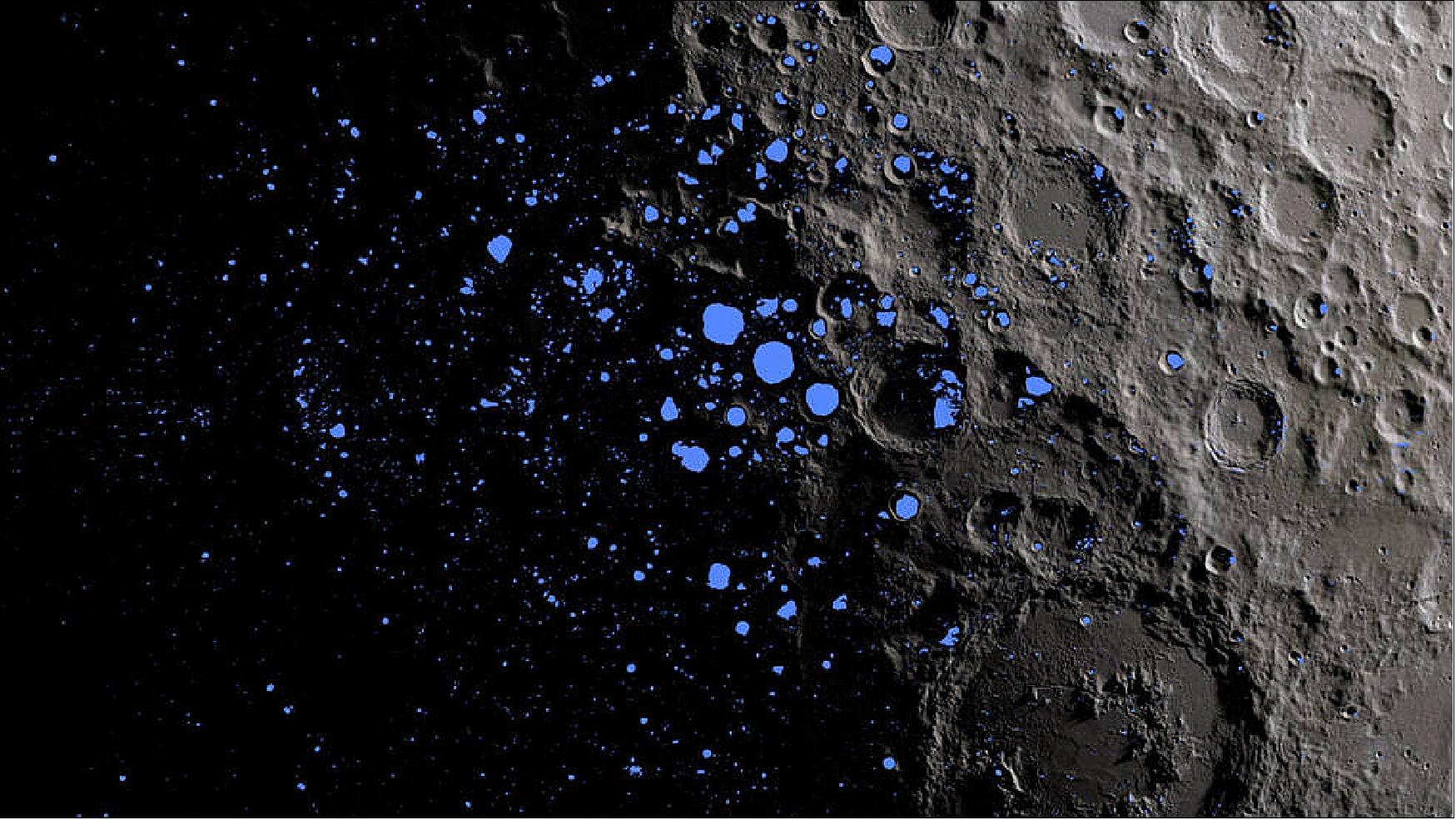
- Explosive solar activity, like flares and coronal mass ejections, blasts highly energetic, electrically charged particles into space. Earth's atmosphere shields us from most of this radiation, but on the moon, these particles — ions and electrons — slam directly into the surface. They accumulate in two layers beneath the surface; the bulky ions can't penetrate deeply because they are more likely to hit atoms in the regolith, so they form a layer closer to the surface while the tiny electrons slip through and form a deeper layer. The ions have positive charge while the electrons carry negative charge. Since opposite charges attract, normally these charges flow towards each other and balance out.
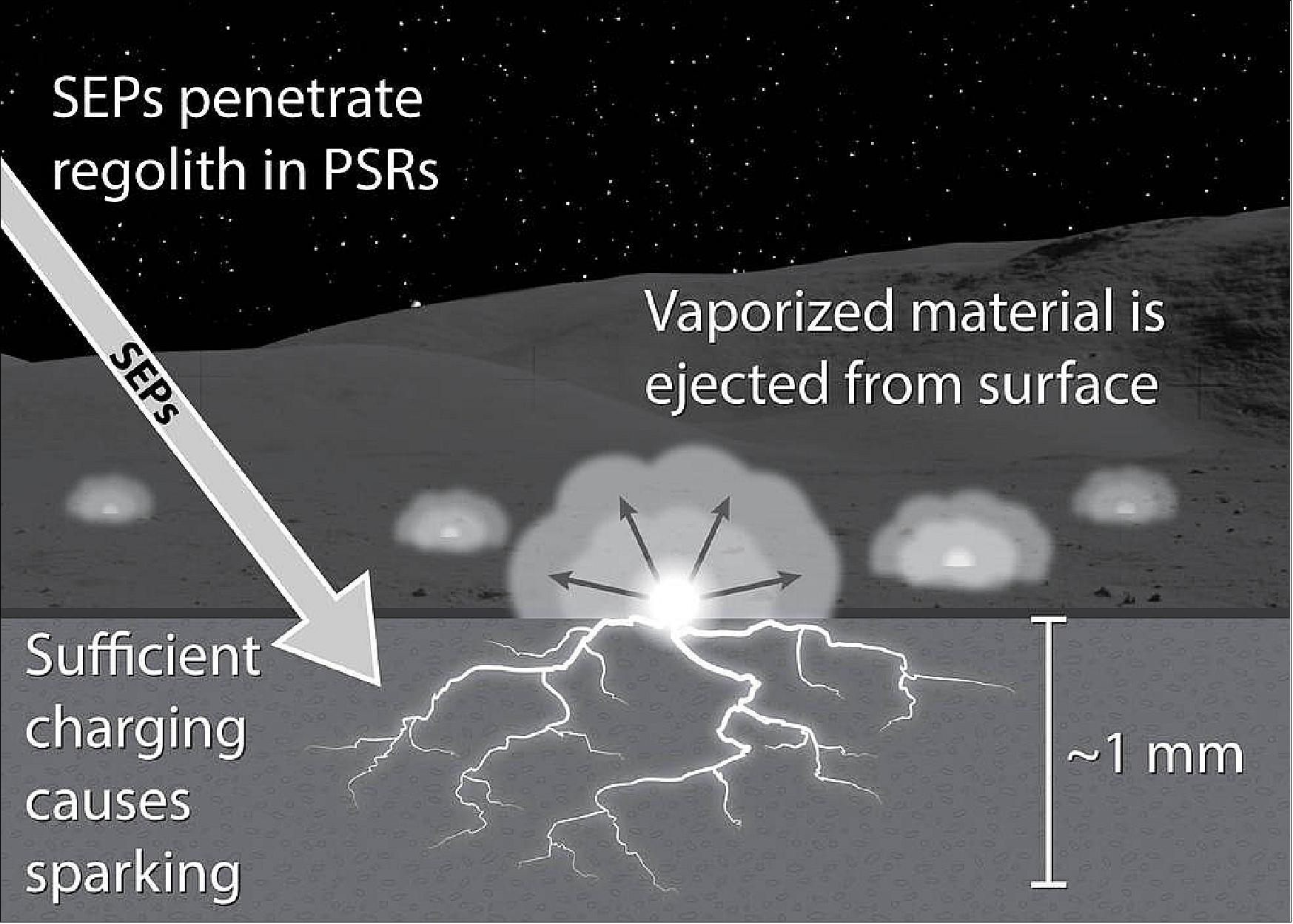
- In August 2014, Jordan's team published simulation results predicting that strong solar storms would cause the regolith in the moon's PSRs (Permanently Shadowed Regions) to accumulate charge in these two layers until explosively released, like a miniature lightning strike. The PSRs are so frigid that regolith becomes an extremely poor conductor of electricity. Therefore, during intense solar storms, the regolith is expected to dissipate the build-up of charge too slowly to avoid the destructive effects of a sudden electric discharge, called dielectric breakdown. The research estimates the extent that this process can alter the regolith.
- "This process isn't completely new to space science — electrostatic discharges can occur in any poorly conducting (dielectric) material exposed to intense space radiation, and is actually the leading cause of spacecraft anomalies," said Timothy Stubbs of NASA/GSFC, a co-author of the paper. The team's analysis was based on this experience. From spacecraft studies and analysis of samples from NASA's Apollo lunar missions, the researchers knew how often large solar storms occur. From previous lunar research, they estimated that the top millimeter of regolith would be buried by meteoroid impacts after about a million years, so it would be too deep to be subject to electric charging during solar storms. Then they estimated the energy that would be deposited over a million years by both meteoroid impacts and dielectric breakdown driven by solar storms, and found that each process releases enough energy to alter the regolith by a similar amount.
- "Lab experiments show that dielectric breakdown is an explosive process on a tiny scale," said Jordan. "During breakdown, channels could be melted and vaporized through the grains of soil. Some of the grains may even be blown apart by the tiny explosion. The PSRs are important locations on the moon, because they contain clues to the moon's history, such as the role that easily vaporized material like water has played. But to decipher that history, we need to know in what ways PSRs are not pristine; that is, how they have been weathered by the space environment, including solar storms and meteoroid impacts."
- The next step is to search for evidence of dielectric breakdown in PSRs and determine if it could happen in other areas on the moon. Observations from NASA's Lunar Reconnaissance Orbiter spacecraft indicate that the soil in PSRs is more porous or "fluffy" than other areas, which might be expected if breakdown was blasting apart some of the soil grains there. However, experiments, some already underway, are needed to confirm that breakdown is responsible for this. Also, the lunar night is long — about two weeks — so it can become cold enough for breakdown to occur in other areas on the moon, according to the team. There may even be "sparked" material in the Apollo samples, but the difficulty would be determining if this material was altered by breakdown or a meteoroid impact. The team is working with scientists at the Johns Hopkins University Applied Physics Laboratory on experiments to see how breakdown affects the regolith and to look for any tell-tale signatures that could distinguish it from the effects of meteoroid impacts.
• March 23, 2016: New NASA-funded research provides evidence that the spin axis of Earth’s moon shifted by about five degrees roughly three billion years ago. The evidence of this motion is recorded in the distribution of ancient lunar ice, evidence of delivery of water to the early solar system. 50) 51)
- “The same face of the moon has not always pointed towards Earth,” said Matthew Siegler of the Planetary Science Institute in Tucson, Arizona, lead author of a paper in today’s journal Nature. “As the axis moved, so did the face of the ‘man in the moon.’ He sort of turned his nose up at the Earth.” This interdisciplinary research was conducted across multiple institutions as part of NASA’s SSERVI (Solar System Exploration Research Virtual Institute) based at NASA/ARC (Ames Research Center) in Moffett Field, California.
- Water ice can exist on Earth’s moon in areas of permanent shadow. If ice on the moon is exposed to direct sunlight it evaporates into space. Authors of the Nature article show evidence that a shift of the lunar spin axis billions of years ago enabled sunlight to creep into areas that were once shadowed and likely previously contained ice. The researchers found that the ice that survived this shift effectively “paints” a path along which the axis moved. They matched the path with models predicting where the ice could remain stable and inferred the moon’s axis had moved by approximately five degrees. This is the first physical evidence that the moon underwent such a dramatic change in orientation and implies that much of the polar ice on the moon is billions of years old.
- “The new findings are a compelling view of the moon’s dynamic past,” said Dr. Yvonne Pendleton, director of SSERVI, which supports lunar and planetary science research to advance human exploration of the solar system through scientific discovery. “It is wonderful to see the results of several missions pointing to these insights.” - The authors analyzed data from several NASA missions, including Lunar Prospector, LRO (Lunar Reconnaissance Orbiter), LCROSS (Lunar Crater and Observation Sensing Satellite), and GRAIL (Gravity Recovery and Interior Laboratory), to build the case for a change in the moon’s orientation. Topography from the LOLA ( Lunar Orbiter Laser Altimeter) and thermal measurements from the Diviner lunar radiometer – both on LRO – are used to aid the interpretation of Lunar Prospector neutron data that support the polar wander hypothesis.
- Siegler noticed that the distribution of ice observed at each of the lunar poles appeared to be more related to each other than previously thought. Upon further investigation, Siegler – and co-author Richard Miller of the University of Alabama at Huntsville – discovered that ice concentrations were displaced from each pole by the same distance, but in exactly opposite directions, suggesting the spin axis in the past was tilted from what we see today. A change in the tilt means that some of the ice deposited long ago has since evaporated as it was exposed to sunlight, but those areas that remain in permanent shadow between the old orientation and the new one retain their ice, and thus indicate what happened.
- A planetary body can shift on its axis when there is a very large change in mass distribution. Co-author James Keane, of the University of Arizona in Tucson, modeled the way changes in the lunar interior would have affected the moon’s spin and tilt. In doing so, he found the Procellarum region on the lunar near-side was the only feature that could match the direction and amount of change in the axis indicated by the ice distributions near the poles. Furthermore, concentrations of radioactive material in the Procellarum region are sufficient to have heated a portion of the lunar mantle, causing a density change significant enough to reorient the moon.
- Some of this heated mantle material melted and came to the surface to form the visible dark patches that fill large lunar basins known as mare. It’s these mare patches that give the man in the moon his “face.”
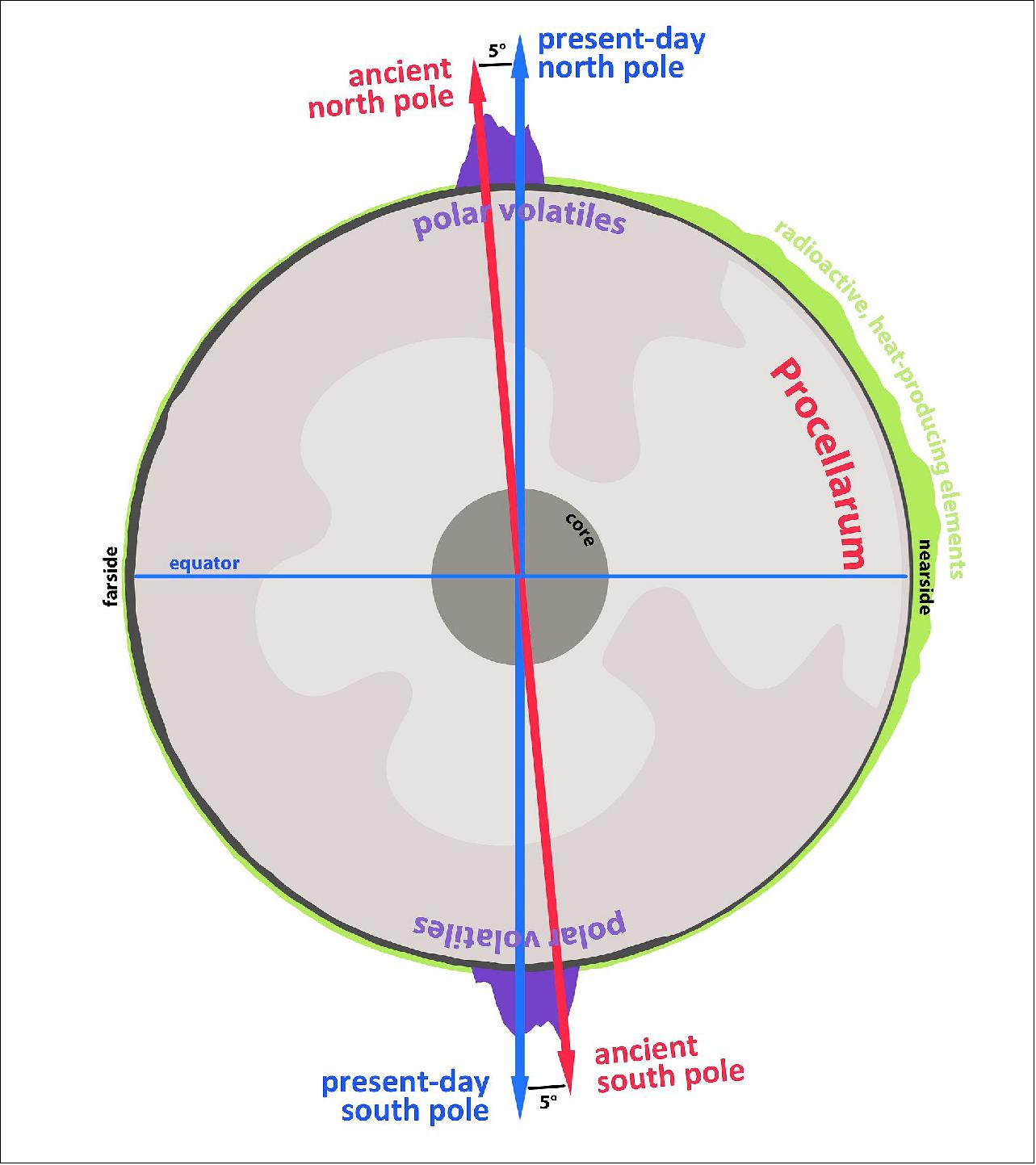
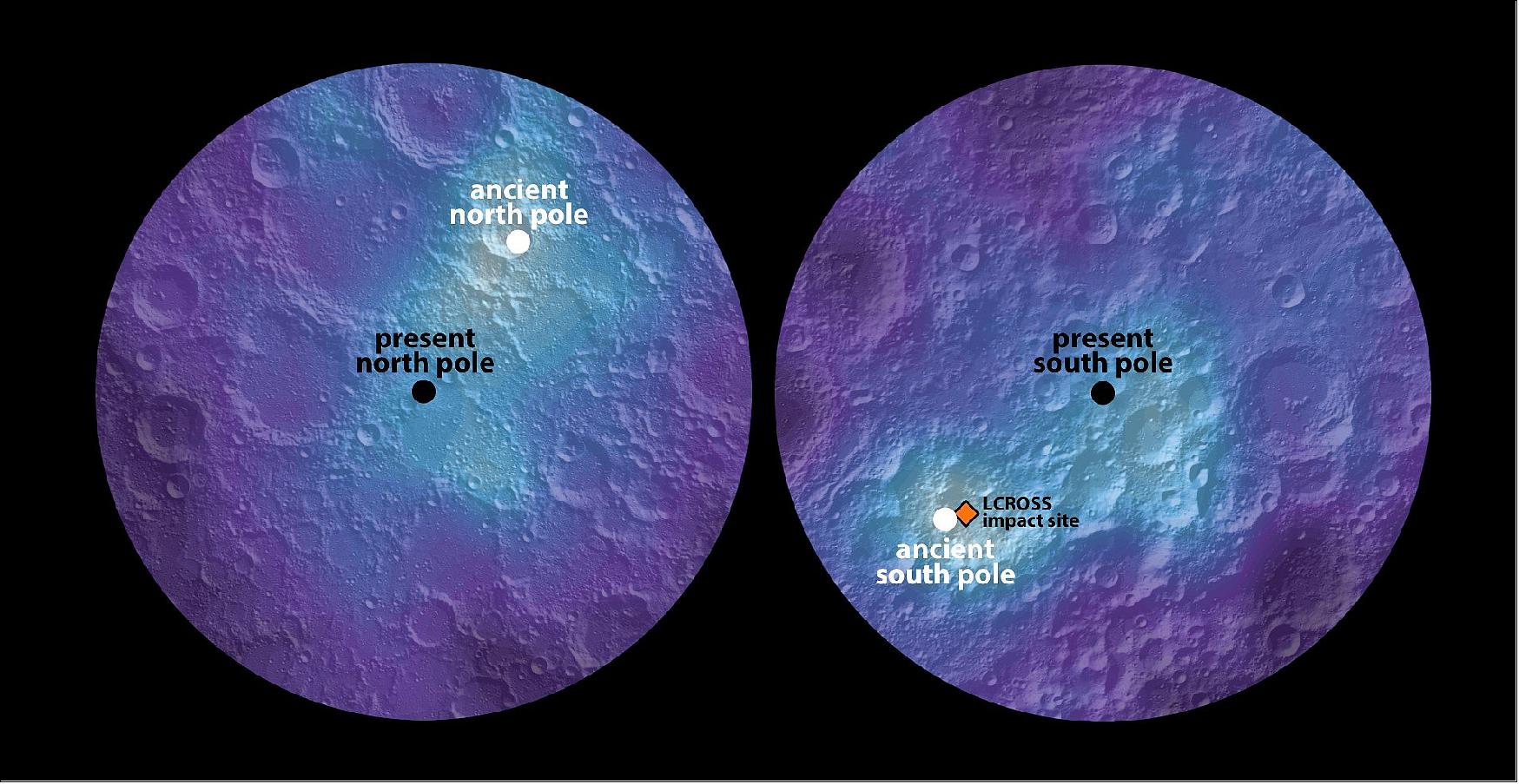
• Dec. 18, 2015: LRO recently captured a unique view of Earth from the spacecraft's vantage point in orbit around the moon (Figure 38). "The image is simply stunning," said Noah Petro, Deputy Project Scientist for LRO at NASA's Goddard Space Flight Center in Greenbelt, Maryland. "The image of the Earth evokes the famous 'Blue Marble' image taken by Astronaut Harrison Schmitt during Apollo 17, 43 years ago (1972), which also showed Africa prominently in the picture." 52) 53)
- LRO was launched on June 18, 2009, and has collected a treasure trove of data with its seven powerful instruments, making an invaluable contribution to our knowledge about the moon. LRO experiences 12 Earthrises every day; however the spacecraft is almost always busy imaging the lunar surface so only rarely does an opportunity arise such that its camera instrument can capture a view of Earth. Occasionally LRO points off into space to acquire observations of the extremely thin lunar atmosphere and perform instrument calibration measurements. During these movements sometimes Earth (and other planets) pass through the camera's field of view and dramatic images such as the one shown here are acquired.
- "From the Earth, the daily moonrise and moonset are always inspiring moments," said Mark Robinson of Arizona State University in Tempe, principal investigator for LROC. "However, lunar astronauts will see something very different: viewed from the lunar surface, the Earth never rises or sets. Since the moon is tidally locked, Earth is always in the same spot above the horizon, varying only a small amount with the slight wobble of the moon. The Earth may not move across the 'sky', but the view is not static. Future astronauts will see the continents rotate in and out of view and the ever-changing pattern of clouds will always catch one's eye, at least on the nearside. The Earth is never visible from the farside; imagine a sky with no Earth or moon - what will farside explorers think with no Earth overhead?"
- NASA's first Earthrise image was taken with the Lunar Orbiter 1 spacecraft in 1966. Perhaps NASA's most iconic Earthrise photo was taken by the crew of the Apollo 8 mission as the spacecraft entered lunar orbit on Christmas Eve Dec. 24, 1968. That evening, the astronauts — Commander Frank Borman, Command Module Pilot Jim Lovell, and Lunar Module Pilot William Anders — held a live broadcast from lunar orbit, in which they showed pictures of the Earth and moon as seen from their spacecraft. Said Lovell, "The vast loneliness is awe-inspiring and it makes you realize just what you have back there on Earth."

Legend to Figure 38: This image was composed from a series of images taken Oct. 12, 2015 when LRO was about 134 km above the moon's farside crater Compton. Capturing an image of the Earth and moon with LRO's LROC (Lunar Reconnaissance Orbiter Camera) instrument is a complicated task. First the spacecraft must be rolled to the side (in this case 67 º), then the spacecraft slews with the direction of travel to maximize the width of the lunar horizon in LROC's NAC (Narrow Angle Camera) image. All this takes place while LRO is traveling faster than 5760 km/hr (over 1,600 m/s) relative to the lunar surface below the spacecraft!
The high-resolution NAC of LROC takes black-and-white images, while the lower resolution WAC (Wide Angle Camera) takes color images, so you might wonder how we got a high-resolution picture of the Earth in color. Since the spacecraft, Earth, and moon are all in motion, we had to do some special processing to create an image that represents the view of the Earth and moon at one particular time. The final Earth image contains both WAC and NAC information. WAC provides the color, and the NAC provides the high-resolution detail.
• September 15, 2015: Earth's gravity has influenced the orientation of thousands of faults that form in the lunar surface as the moon shrinks, according to new results from NASA's LRO (Lunar Reconnaissance Orbiter) spacecraft (Figure 39). 54)
- In August, 2010, researchers using images from LRO's NAC (Narrow Angle Camera) reported the discovery of 14 cliffs known as "lobate scarps" on the moon's surface (Figure 40), in addition to about 70 previously known from the limited high-resolution Apollo Panoramic Camera photographs. Due largely to their random distribution across the surface, the science team concluded that the moon is shrinking.
- These small faults are typically less than10 km long and only tens of meters high. They are most likely formed by global contraction resulting from cooling of the moon's still hot interior. As the interior cools and portions of the liquid outer core solidify, the volume decreases; thus the moon shrinks and the solid crust buckles.
- Now, after more than six years in orbit, the LROC (Lunar Reconnaissance Orbiter Camera) has imaged nearly three-fourths of the lunar surface at high resolution, allowing the discovery of over 3,000 more of these features (Figure 41). These globally distributed faults have emerged as the most common tectonic landform on the moon. An analysis of the orientations of these small scarps yielded a surprising result: the faults created as the moon shrinks are being influenced by an unexpected source—gravitational tidal forces from Earth.
- Global contraction alone should generate an array of thrust faults with no particular pattern in the orientations of the faults, because the contracting forces have equal magnitude in all directions. "This is not what we found," says Smithsonian senior scientist Thomas Watters of the National Air and Space Museum in Washington. "There is a pattern in the orientations of the thousands of faults and it suggests something else is influencing their formation, something that's also acting on a global scale — 'massaging' and realigning them." Watters is lead author of the paper describing this research published in the October issue of the journal Geology.
- The other forces acting on the moon come not from its interior, but from Earth. These are tidal forces. When the tidal forces are superimposed on the global contraction, the combined stresses should cause predictable orientations of the fault scarps from region to region. "The agreement between the mapped fault orientations and the fault orientations predicted by the modeled tidal and contractional forces is pretty striking," says Watters.
- "The discovery of so many previously undetected tectonic features as the LROC high-resolution image coverage continues to grow is truly remarkable," said Mark Robinson of Arizona State University, coauthor and LROC principal investigator. "Early on in the mission we suspected that tidal forces played a role in the formation of tectonic features, but we did not have enough coverage to make any conclusive statements. Now that NAC images are available with appropriate lighting for more than half of the moon, structural patterns are starting to come into focus."
- The fault scarps are very young – so young that they are likely still actively forming today. The team's modeling shows that the peak stresses are reached when the moon is farthest from Earth in its orbit (at apogee). If the faults are still active, the occurrence of shallow moonquakes related to slip events on the faults may be most frequent when the moon is at apogee. This hypothesis can be tested with a long-lived lunar seismic network.
- "With LRO we've been able to study the moon globally in detail not yet possible with any other body in the solar system beyond Earth, and the LRO data set enables us to tease out subtle but important processes that would otherwise remain hidden," said John Keller, LRO Project Scientist at NASA's Goddard Space Flight Center, Greenbelt, Maryland.
- Launched on June 18, 2009, LRO has collected a treasure trove of data with its seven powerful instruments, making an invaluable contribution to our knowledge about the moon. LRO is managed by NASA's Goddard Space Flight Center in Greenbelt, Maryland, under the Discovery Program, managed by NASA's Marshall Space Flight Center in Huntsville for the Science Mission Directorate at NASA Headquarters in Washington, DC.
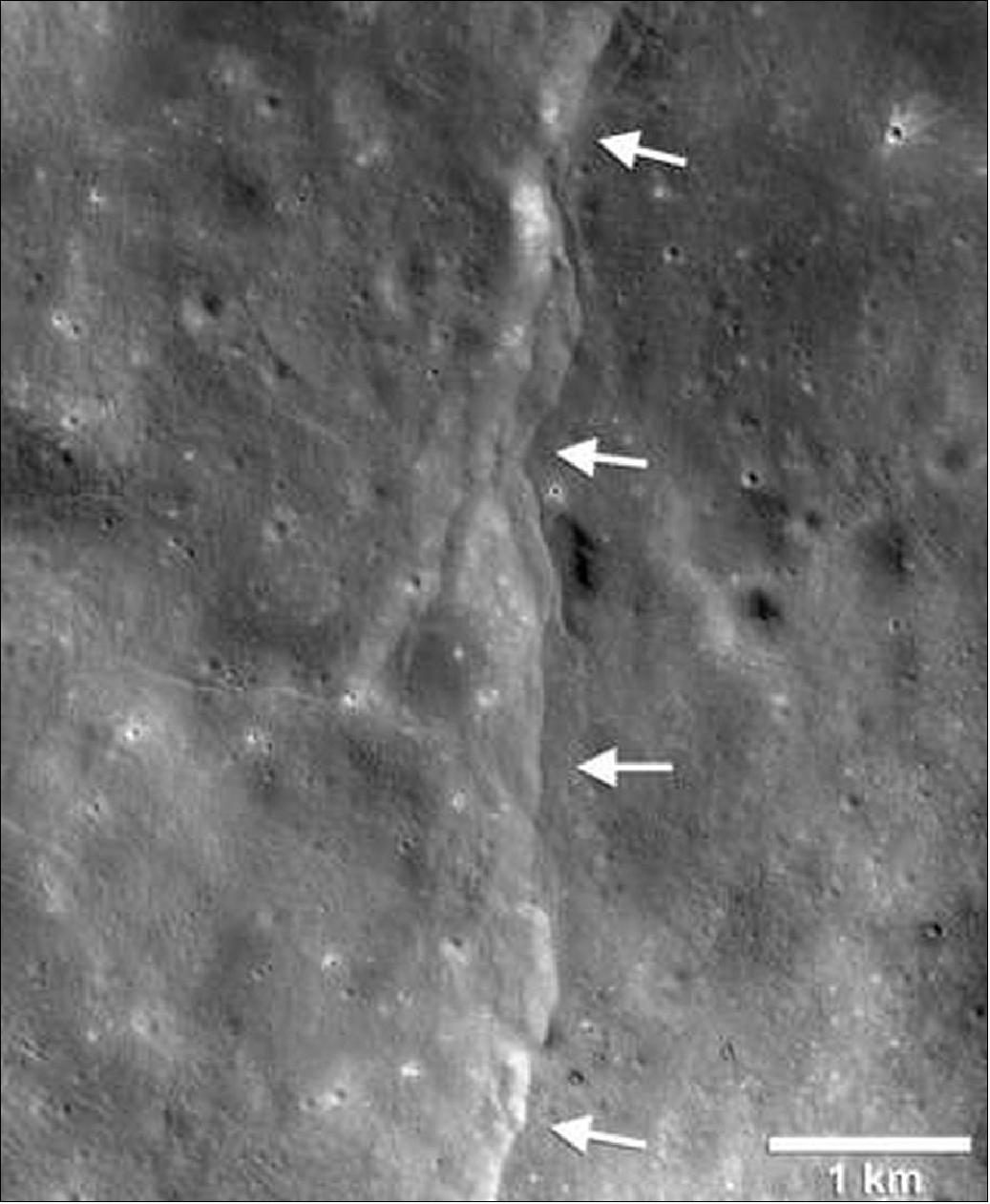
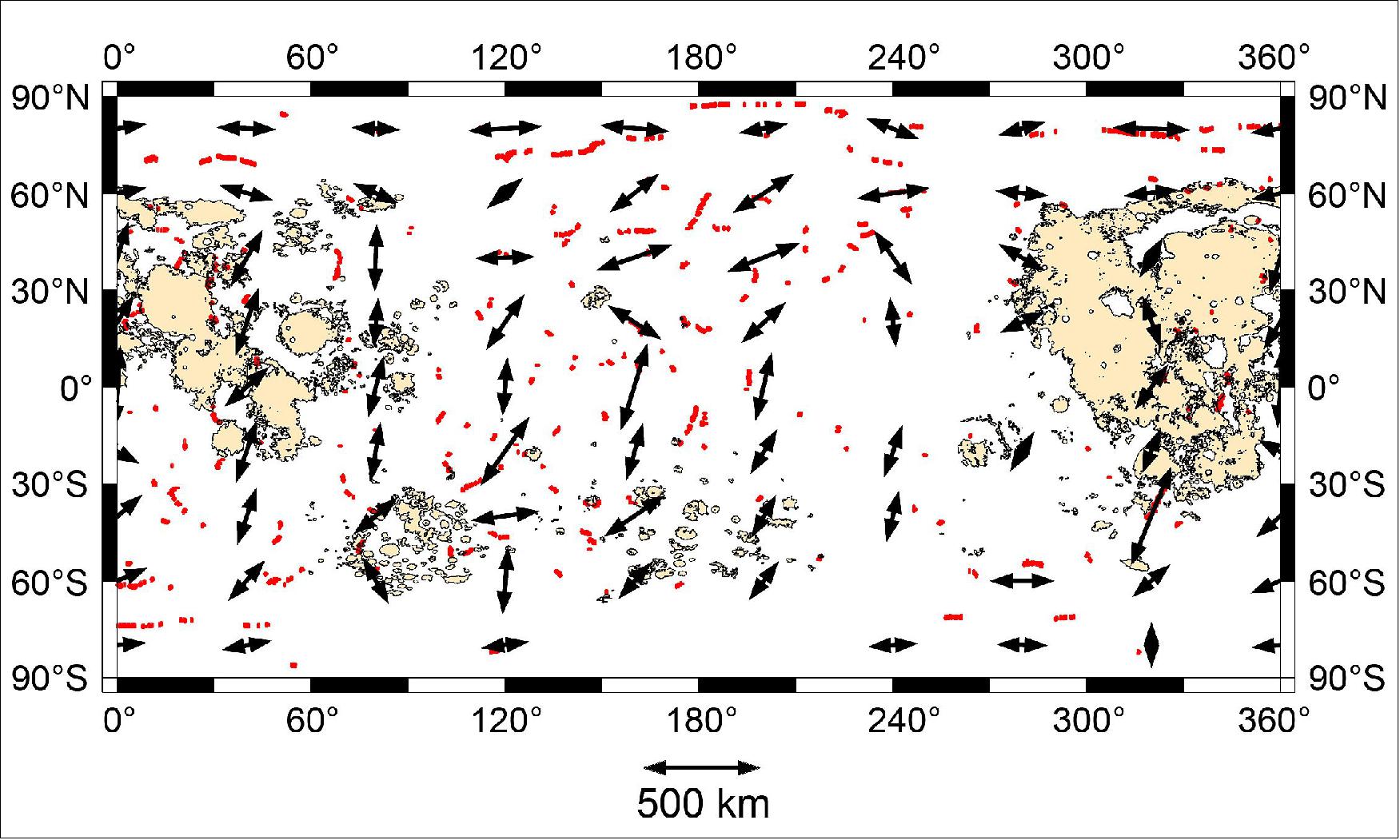
• On May 4, 2015, flight controllers at NASA/GSFC performed two station keeping burns to change LRO’s orbit. The new orbit allows LRO to pass within 20 km of the South Pole and 165 km over the North Pole. To optimize science return, team members made the decision to change the orbit after determining that the new orbit configuration poses no danger to the spacecraft. LRO can operate for many years at this orbit. 55)
- The new orbit enables exciting new science and will see improved measurements near the South Pole. Two of the instruments benefit significantly from the orbit change. The return signal from the LOLA (Lunar Orbiter Laser Altimeter) laser shots will become stronger, producing a better signal. LOLA will obtain better measurements of specific regions near the South Pole that have unique illumination conditions. The Diviner radiometer will be able to see smaller lunar features through the collection of higher resolution data.
- “The lunar poles are still places of mystery where the inside of some craters never see direct sunlight and the coldest temperatures in the solar system have been recorded,” said John Keller, LRO project scientist at NASA Goddard. “By lowering the orbit over the South Pole, we are essentially magnifying the sensitivity of the LRO instruments which will help us understand the mechanisms by which water or other volatiles might be trapped there.”
• March 2015: The Diviner Lunar Radiometer Experiment on board the LRO (Lunar Reconnaissance Orbiter) is currently mapping multispectral thermal emission from the lunar surface . These data provide key insights into the surface composition of the Moon, primarily from the three narrow channels centered near 8 µm. This is the location of the Christiansen Feature (CF), the position of which changes as a function of silicate composition. Diviner also maps the lunar surface at longer thermal wavelengths (23-400 µm) which have not generally been used in mineralogical analyses. 56)
- In previous work the team found that emissivity of the long wavelength channels varies as a function of solar incidence angle. A correction has been developed for the 8 µm channels that normalizes all Diviner daytime data to 0º incidence angles at the equator. Here the team describes the current correction for the thermal wavelengths that adopts a similar normalization method.
- The correction assumes that the data measured at an incidence angle of 0º are ideal and emissivity values measured under these conditions are close to true. Thus, we examined several relatively homogenous locations within the equatorial region of the Moon to determine the variation of emissivity with incidence angle (the equatorial zone has the most variation in incidence angle, Figure 42). The team plotted the spectra for each location, and compared the emissivity change with incidence angle for each channel. Because we assume that 0º incidence measurements are ideal, all emissivities were divided by the emissivity at 0º to develop a calibration curve for each channel (Figure 43). The team then applied the calibrations to their respective channel across the global data set to correct the emissivity values for higher incidence angle measurements.
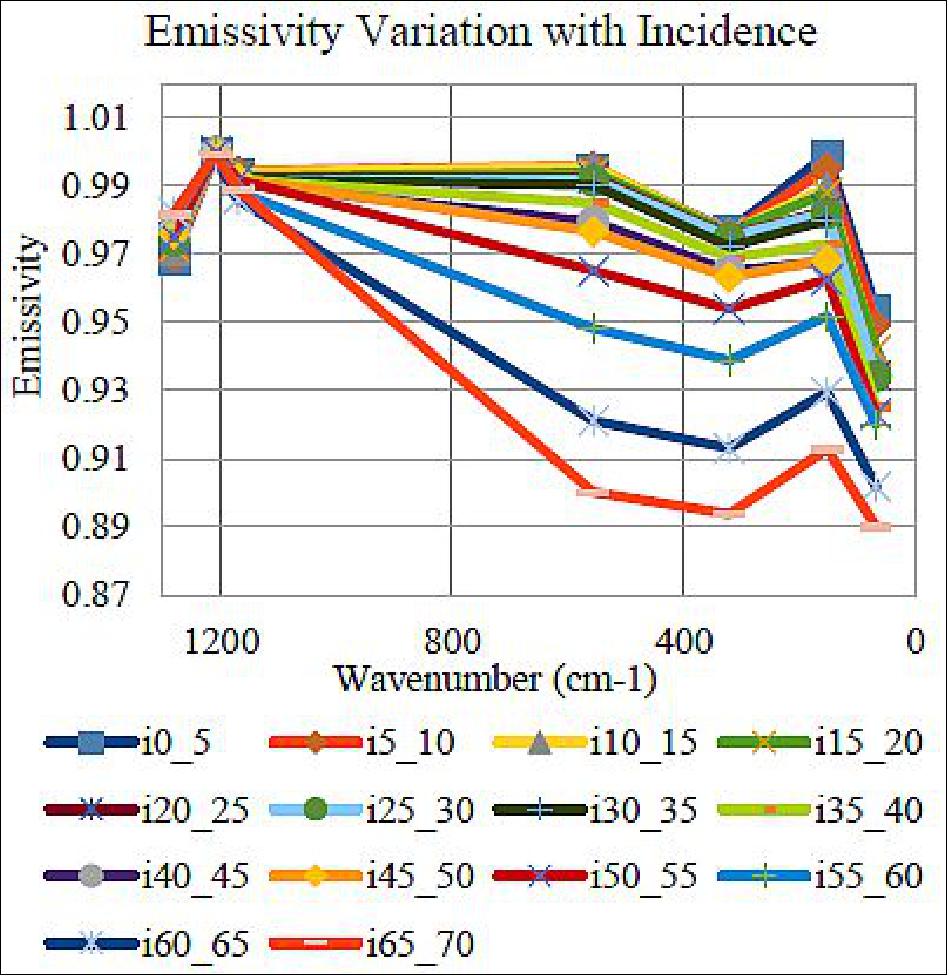
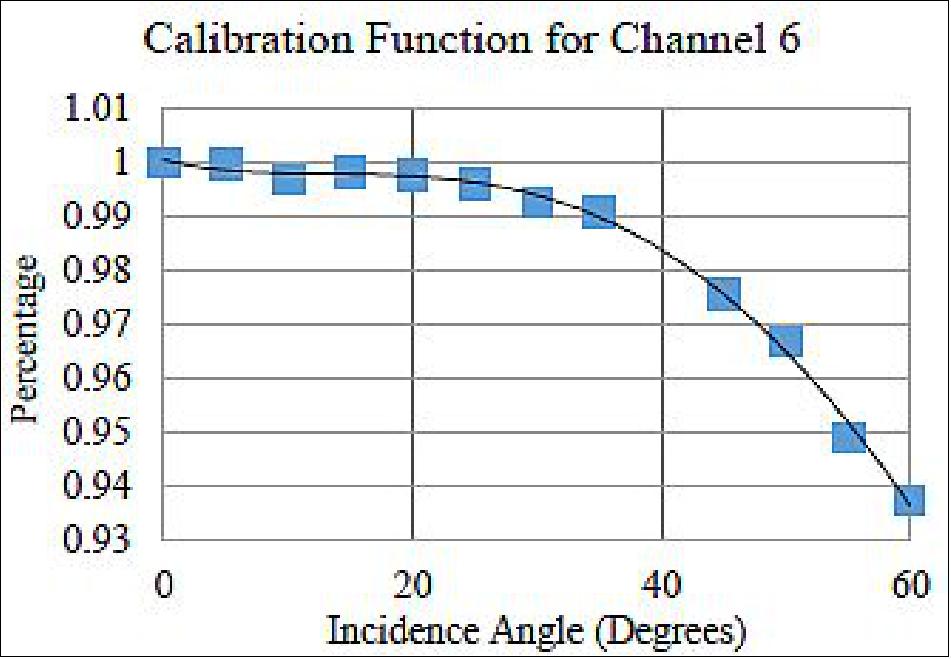
- Results: The applied correction normalized the data and consistently increased the emissivity for the higher incidence angle measurements (Figure 44), bringing them closer to the emissivity values measured at 0º incidence. The spectra are still not exactly the same for the same location, but are more consistent than the uncorrected data. In some areas, we saw a bit of overcorrection, and the emissivity for channel 8 was always above 1.0.
Additionally, a global map of each of the thermal channels shows that the correction improves the consistency of the data set at different incidence angles. Figure 45 compares the global data set for several incidence angle bins with and without the correction for channel 6.
The current correction normalizes the data as a function of incidence angle, which increases the spectral signal, and allows for reliable interpretation of the emissivity data measured at varying incidence angles. This improves our ability to use data collected in the thermal wavelengths and allows the team to use this data to augment our interpretation of the lunar surface composition.
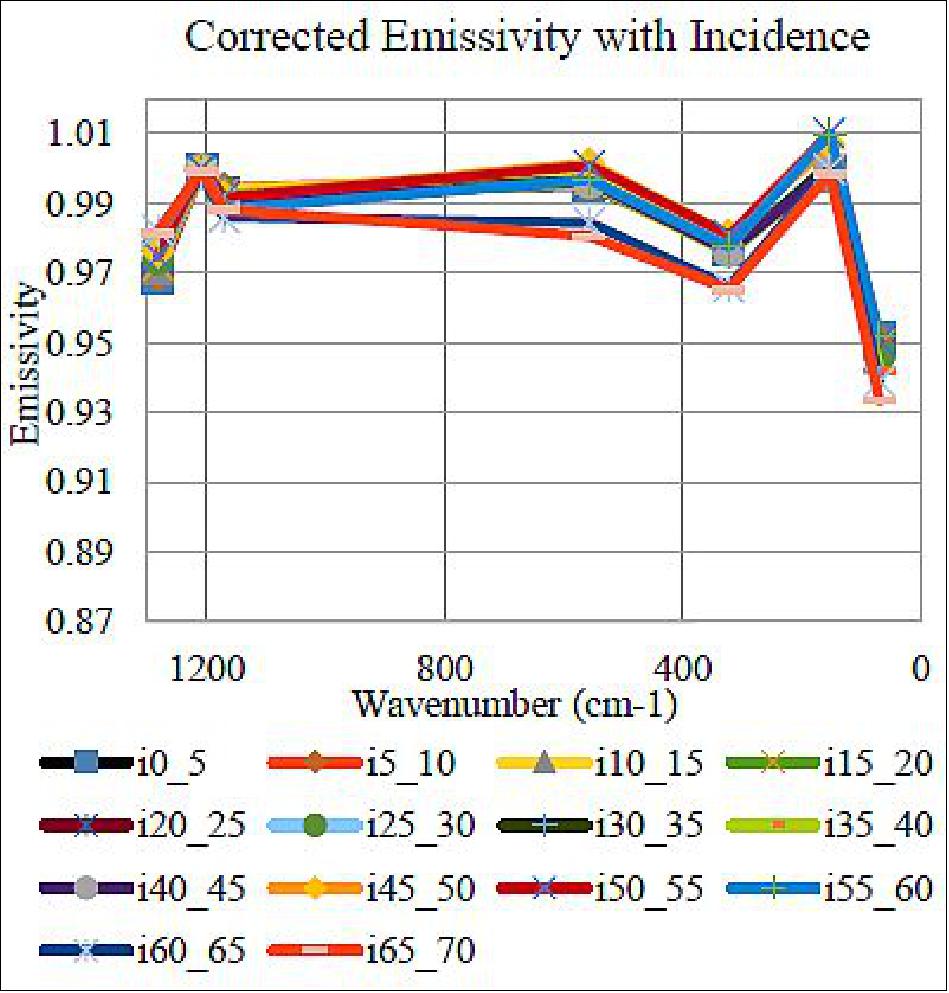
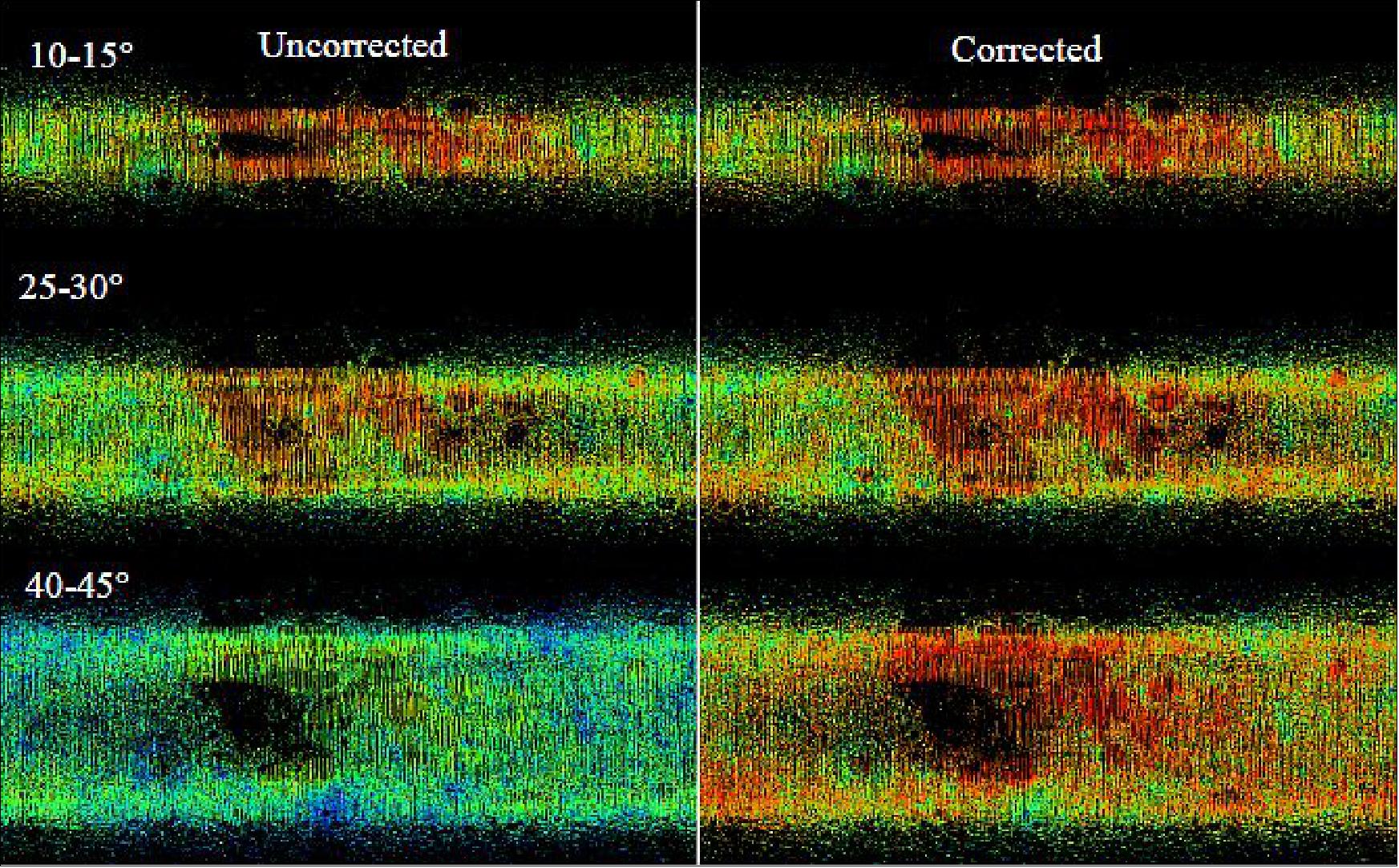
• Feb. 4, 2015: The recent discovery of hydrogen-bearing molecules, possibly including water, on the moon has explorers excited because these deposits could be mined if they are sufficiently abundant, sparing the considerable expense of bringing water from Earth. Lunar water could be used for drinking or its components – hydrogen and oxygen – could be used to manufacture important products on the surface that future visitors to the moon will need, like rocket fuel and breathable air. 57)
- Recent observations by NASA's Lunar Reconnaissance Orbiter (LRO) spacecraft indicate these deposits may be slightly more abundant on crater slopes in the southern hemisphere that face the lunar South Pole. "There’s an average of about 23 parts-per-million-by-weight (ppmw) more hydrogen on the Pole-Facing Slopes (PFS) than on the Equator-Facing Slopes (EFS)," according to Timothy McClanahan of NASA/GSFC in Greenbelt, Maryland. - This is the first time a widespread geochemical difference in hydrogen abundance between PFS and EFS on the moon has been detected. It is equal to a 1% difference in the neutron signal detected by LRO's LEND (Lunar Exploration Neutron Detector) instrument.
- The hydrogen-bearing material is volatile (easily vaporized), and may be in the form of water molecules (two hydrogen atoms bound to an oxygen atom) or hydroxyl molecules (an oxygen bound to a hydrogen) that are loosely bound to the lunar surface. The cause of the discrepancy between PFS and EFS may be similar to how the Sun mobilizes or redistributes frozen water from warmer to colder places on the surface of the Earth, according to McClanahan.
- The team observed the greater hydrogen abundance on PFS in the topography of the moon's southern hemisphere, beginning at between 50 and 60º south latitude. Slopes closer to the South Pole show a larger hydrogen concentration difference. Also, hydrogen was detected in greater concentrations on the larger PFS, about 45 ppmw near the poles. Spatially broader slopes provide more detectable signals than smaller slopes. The result indicates that PFS have greater hydrogen concentrations than their surrounding regions. Also, the LEND measurements over the larger EFS don't contrast with their surrounding regions, which indicates EFS have hydrogen concentrations that are equal to their surroundings, according to McClanahan. The team thinks more hydrogen may be found on PFS in northern hemisphere craters as well, but they are still gathering and analyzing LEND data for this region.
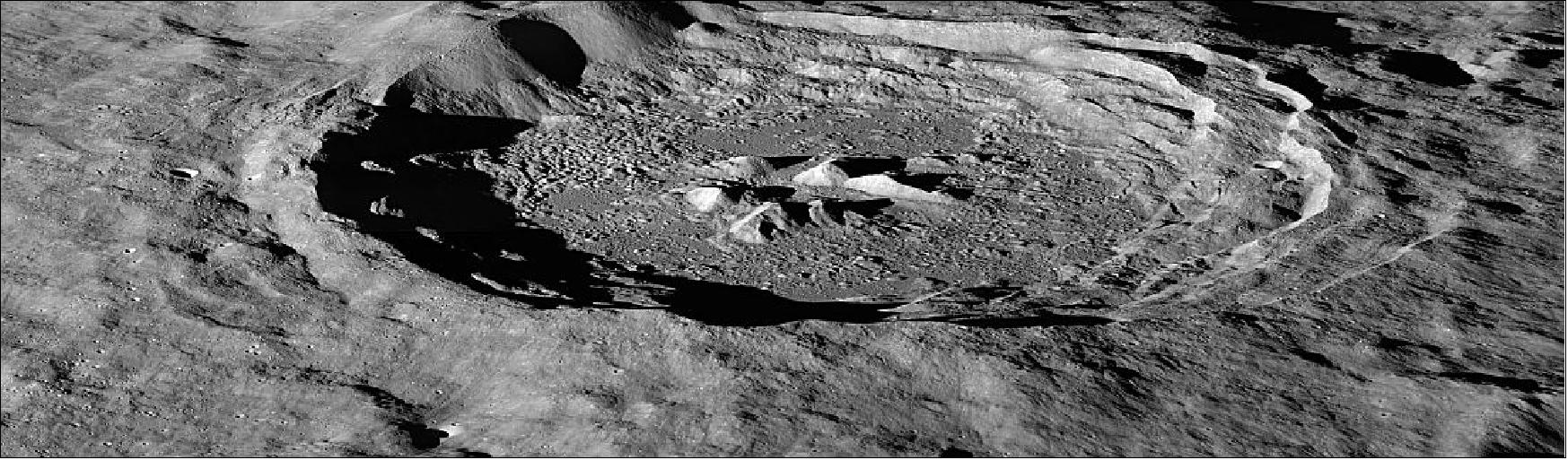
• October 12, 2014: The LRO mission has provided researchers strong evidence the moon’s volcanic activity slowed gradually instead of stopping abruptly a billion years ago. Scores of distinctive rock deposits observed by LRO are estimated to be less than 100 million years old. This time period corresponds to Earth’s Cretaceous period, the heyday of dinosaurs. Some areas may be less than 50 million years old. 58) 59) 60)
The deposits are scattered across the moon’s dark volcanic plains and are characterized by a mixture of smooth, rounded, shallow mounds next to patches of rough, blocky terrain. Because of this combination of textures, the researchers refer to these unusual areas as irregular mare patches. The features are too small to be seen from Earth, averaging less than 500 m across in their largest dimension. One of the largest, a well-studied area called Ina, was imaged from lunar orbit by Apollo 15 astronauts.
Ina appeared to be a one-of-a-kind feature until researchers from Arizona State University in Tempe and Westfälische Wilhelms-Universität Münster in Germany, spotted many similar regions in high-resolution images taken by the two Narrow Angle Cameras that are part of the LROC (Lunar Reconnaissance Orbiter Camera). The team identified a total of 70 irregular mare patches on the near side of the moon.
Several earlier studies suggested that Ina was quite young and might have formed due to localized volcanic activity. However, in the absence of other similar features, Ina was not considered an indication of widespread volcanism. — The findings have major implications for how warm the moon’s interior is thought to be.
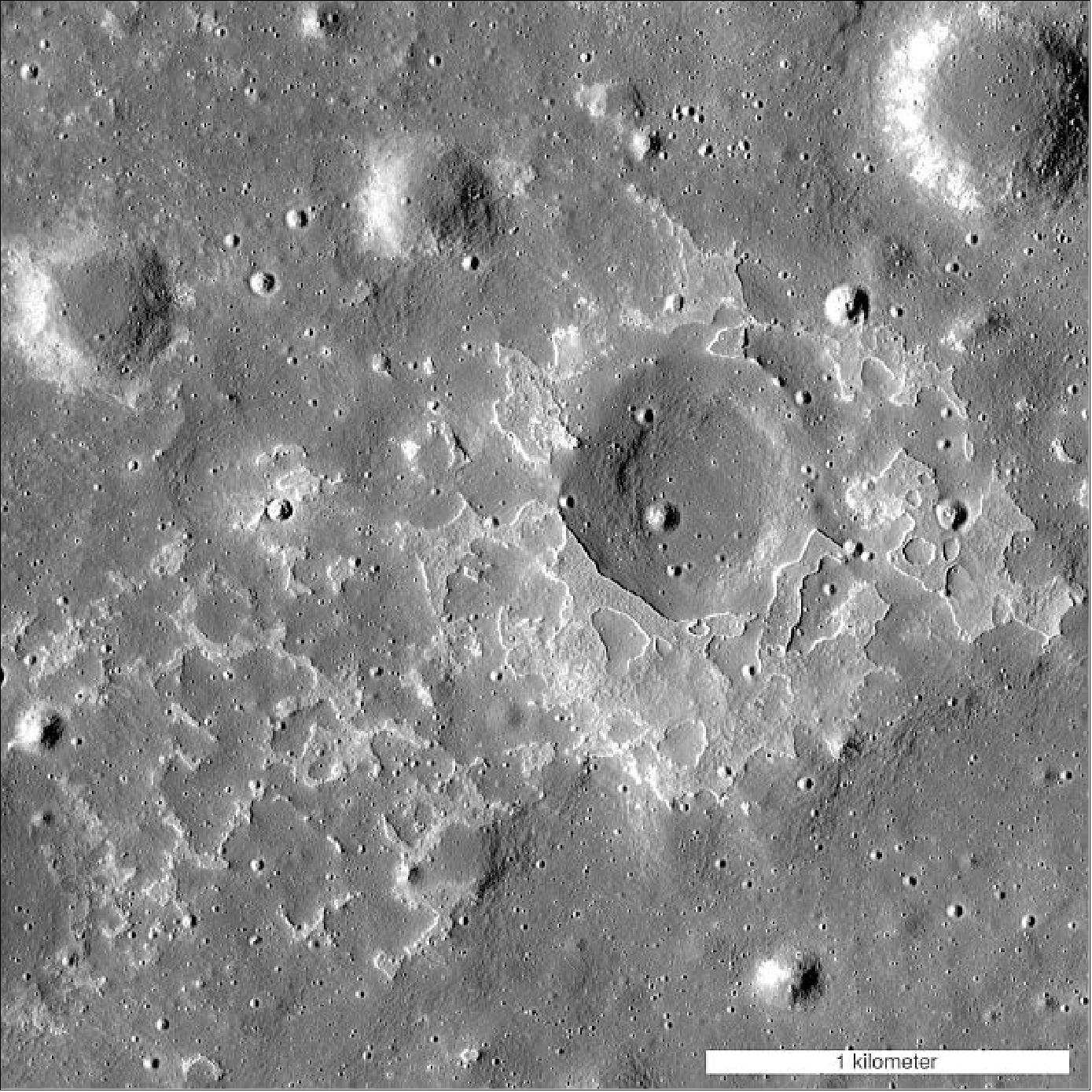
• On June 18, 2014, the LRO mission celebrated its 5th anniversary in space. After a four-day journey, the orbiter successfully entered lunar orbit on June 23, 2009. LRO has continued to shape our view of our nearest celestial neighbor. LRO data has shown us the tracks and equipment left behind from the Apollo astronauts, created the most precise map of the lunar surface, discovered the coldest known temperatures in the solar system, mapped the distribution of hydrogen and possibly water mixed in the lunar soil, identified craters and many other exciting science discoveries.
- In honor of the fifth anniversary, the LRO project kicked off the Moon as Art Campaign. The public was asked to select a favorite orbiter image of the moon for the cover of a special image collection. After two weeks of voting, the public has selected the image of Tycho central peak (Figure 48) as its favorite moon image. The stunningly beautiful Tycho central peak rests inside an impact crater and has a boulder over 100 m wide at its summit. It showcases a breathtaking view of the lunar landscape. 61)
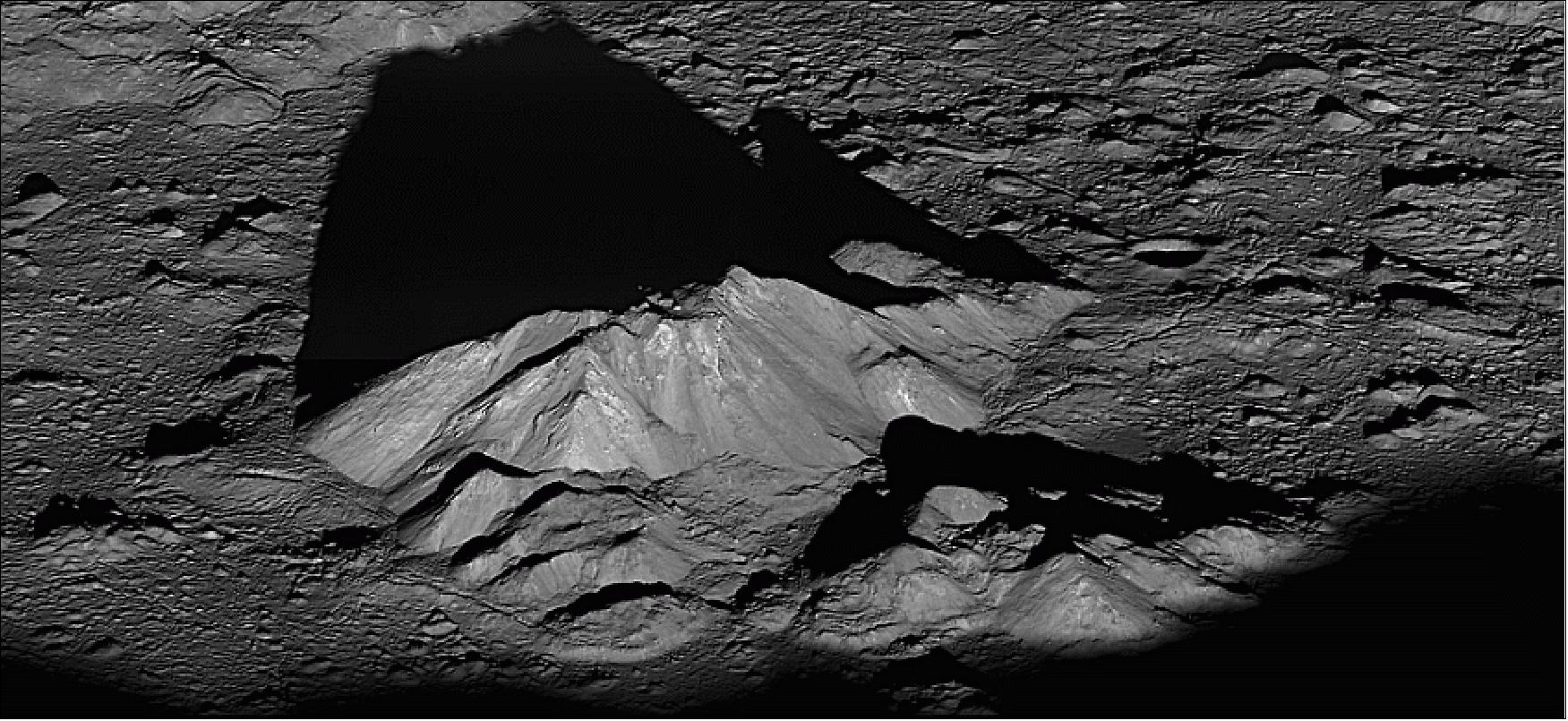
Legend to Figure 48: On June 10, 2011, NASA's Lunar Reconnaissance Orbiter spacecraft pointed the LRO NAC (Narrow Angle Camera) to capture a dramatic sunrise view of Tycho crater. The Tycho crater's central peak complex, shown here, is about 15 km wide, left to right (southeast to northwest in this view). 62)
• May 29, 2014: A team od scientists combined observations from two NASA missions to check out the moon’s lopsided shape and how it changes under Earth’s sway – a response not seen from orbit before. The team drew on studies by NASA’s LRO (Lunar Reconnaissance Orbiter), which has been investigating the moon since 2009, and by NASA’s GRAIL (Gravity Recovery and Interior Laboratory) mission. Because orbiting spacecraft gathered the data, the scientists were able to take the entire moon into account, not just the side that can be observed from Earth. 63)
The lopsided shape of the moon is one result of its gravitational tug-of-war with Earth. The mutual pulling of the two bodies is powerful enough to stretch them both, so they wind up shaped a little like two eggs with their ends pointing toward one another. On Earth, the tension has an especially strong effect on the oceans, because water moves so freely, and is the driving force behind tides.
Earth’s distorting effect on the moon, called the lunar body tide, is more difficult to detect, because the moon is solid except for its small core. Even so, there is enough force to raise a bulge about 51 cm high on the near side of the moon and a similar one on the far side. The position of the bulge actually shifts a few cm over time. Although the same side of the moon constantly faces Earth, because of the tilt and shape of the moon’s orbit, the side facing Earth appears to wobble. From the moon’s viewpoint, Earth doesn’t sit motionless but moves around within a small patch of sky. The bulge responds to Earth’s movements like a dance partner, following wherever the lead goes.
A few studies of these subtle changes were conducted previously from Earth. But not until LRO and GRAIL did satellites provide enough resolution to see the lunar tide from orbit. To search for the tide’s signature, the scientists turned to data taken by LRO’s LOLA (Lunar Orbiter Laser Altimeter), which is mapping the height of features on the moon’s surface. The team chose spots that the spacecraft has passed over more than once, each time approaching along a different flight path. More than 350,000 locations were selected, covering areas on the near and far sides of the moon.
The researchers precisely matched measurements taken at the same spot and calculated whether the height had risen or fallen from one satellite pass to the next; a change indicated a shift in the location of the bulge. A crucial step in the process was to pinpoint exactly how far above the surface LRO was located for each measurement. To reconstruct the spacecraft’s orbit with sufficient accuracy, the researchers needed the detailed map of the moon’s gravity field provided by the GRAIL mission.
• March 2014: The LROC team assembled 10,581 LROC/NAC (Narrow Angle Camera) images, collected over 4 years, into a spectacular northern polar mosaic (Figure 49). A polar stereographic projection was used in order to limit mapping distortions when creating the 2-D map. In addition, the LROC team used improved ephemeris provide by the LOLA and GRAIL teams and an improved camera pointing model to enable accurate projection of each image in the mosaic to within 20 m. 64)
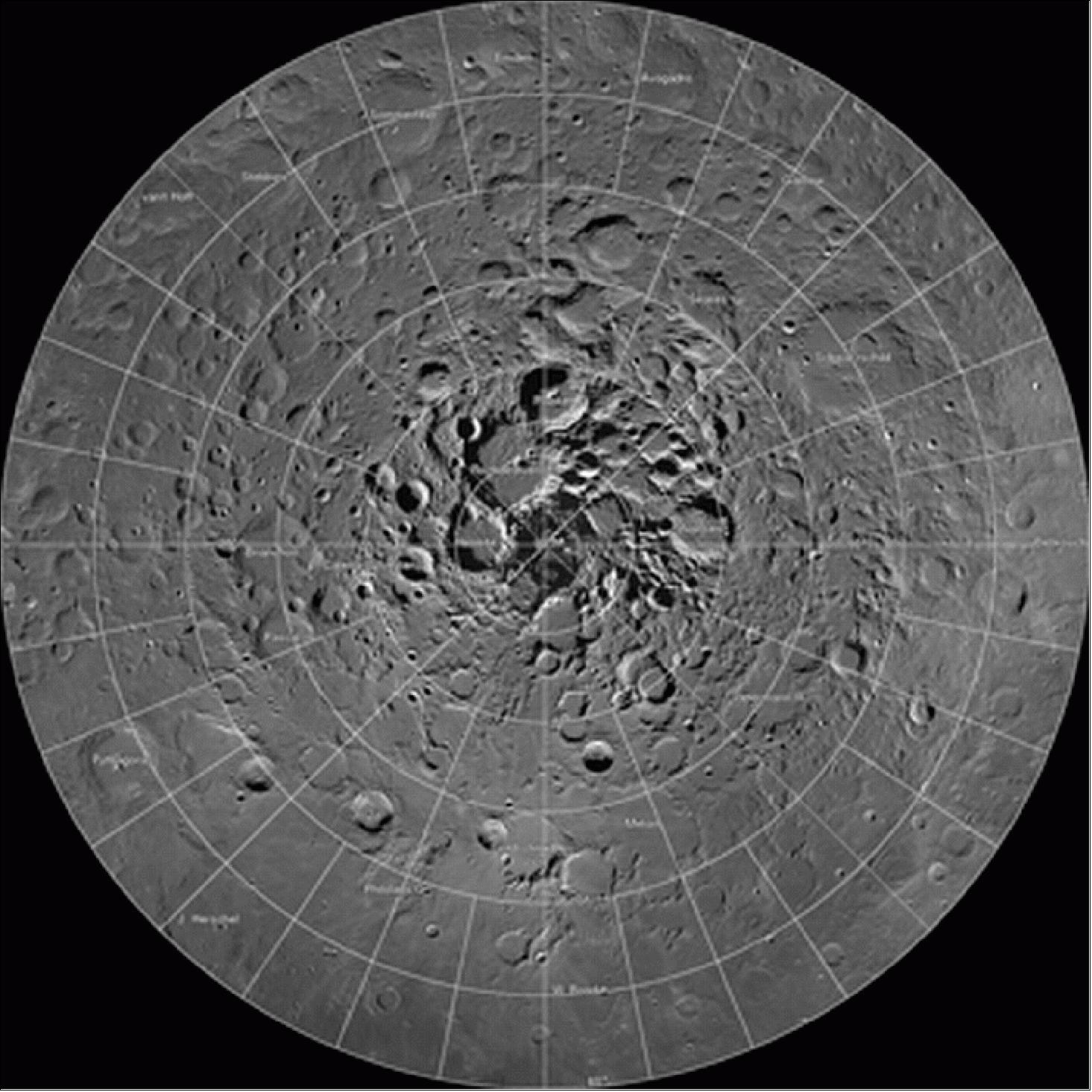
Legend to Figure 49: The interactive masaic can be obtained by clicking onto the link of Ref. 64).
• January 2014: With precise timing, the camera aboard NASA's Lunar Reconnaissance Orbiter (LRO) was able to take a picture of NASA's LADEE (Lunar Atmosphere and Dust Environment Explorer) spacecraft as it orbited our nearest celestial neighbor. The LROC (Lunar Reconnaissance Orbiter Camera) operations team worked with their LADEE and LRO operations counterparts to make the imaging possible. LADEE is in an equatorial orbit (east-to-west) while LRO is in a polar orbit (south-to-north). The two spacecraft are occasionally very close and on Jan. 15, 2014, the two came within 9 km of each other. Since LROC is a pushbroom imager, it builds up an image one line at a time, thus catching a target as small and fast as LADEE is tricky! Both spacecraft are orbiting the Moon with velocities near 1600 m/s, so timing and pointing of LRO needs to be nearly perfect to capture LADEE in an LROC image. 65) 66)
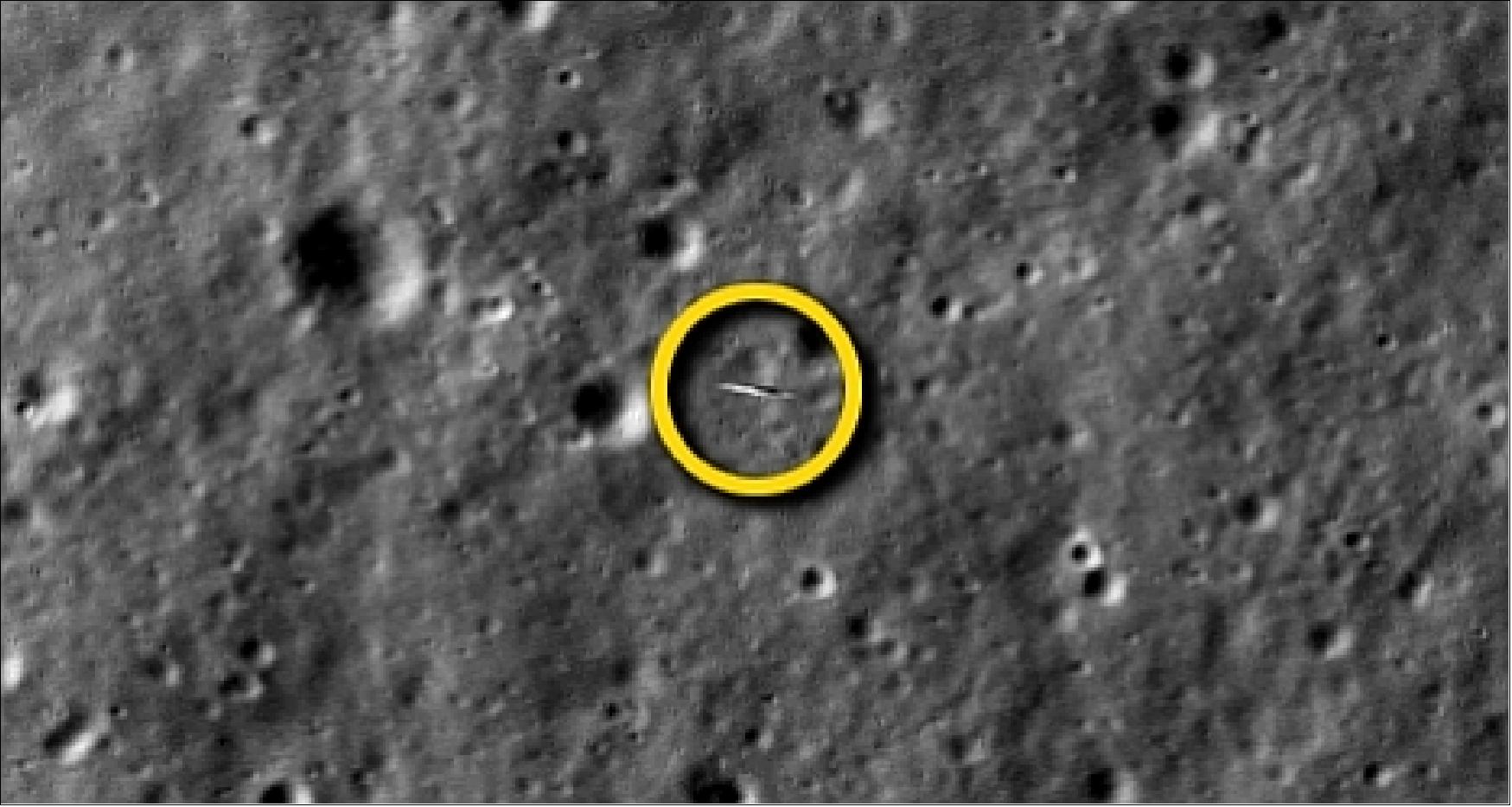
• In November 2013, new findings of the CRaTER (Cosmic Ray Telescope for the Effects of Radiation) instrument project at UNH (University of New Hampshire) were published in the journal Space Weather, documenting the different effects and instrument responses with some of the best long-term measurements ever made of radiation in deep space. 67) 68)
Radiation in deep space comes from cosmic rays, from the solar wind and from solar energetic particles emanated during a solar storm. Particles from these sources rocket through space. Many can pass right through matter, such as our bodies. So-called ionizing radiation knocks electrons off of atoms within our bodies, creating highly reactive ions. Within Earth's protective atmosphere and magnetic field, we receive low doses of background radiation every day. The radiation hazards astronauts face are serious, yet manageable thanks to research endeavors such as the CRaTER instrument.
CRaTER measures realistic human radiation doses at the moon using a unique material called TEP (Tissue-Equivalent Plastic). Two pieces of this plastic, roughly 5 cm and 2.5 cm thick, respectively, are separated by silicon radiation detectors. The TEP-detector combo measures how much radiation may actually reach human organs, which may be less than the amount that reaches the spacecraft.
The LRO spacecraft launched as an exploration mission, a forerunner for humanity's return to the moon. But after completing its primary mission in 2010, LRO has become a powerful instrument for lunar and planetary science. CRaTER is an active participant in this scientific study, discovering a previously unmeasured source of hazardous radiation emanating from the moon itself.
This radiation comes from the partial reflection, also called an albedo, of galactic cosmic rays off the moon's surface. Galactic cosmic ray protons penetrate as much as a meter into the lunar surface, bombarding the material within and creating a spray of secondary radiation and a mix of high-energy particles that flies back out into space. This galactic cosmic ray albedo, which may interact differently with various chemical structures, could provide another method to remotely map the minerals present at the moon's surface.
According to the study, CRaTER directly measured the proton component of the moon's radiation albedo for the first time. The TEP radiation detector measures various components of radiation separately, which enables CRaTER to unfold the energy spectrum of the radiation albedo.
• Sept. 25, 2013: Repeat imaging of anthropogenic (human-made) targets on the Moon remains a Lunar Reconnaissance Orbiter Camera (LROC) priority as the LRO Extended Science Mission continues. These continuing observations of historic hardware and impact craters are not just interesting from a historical standpoint - each image adds to our knowledge of lunar science and engineering, particularly cartography, geology, and photometry. 69)
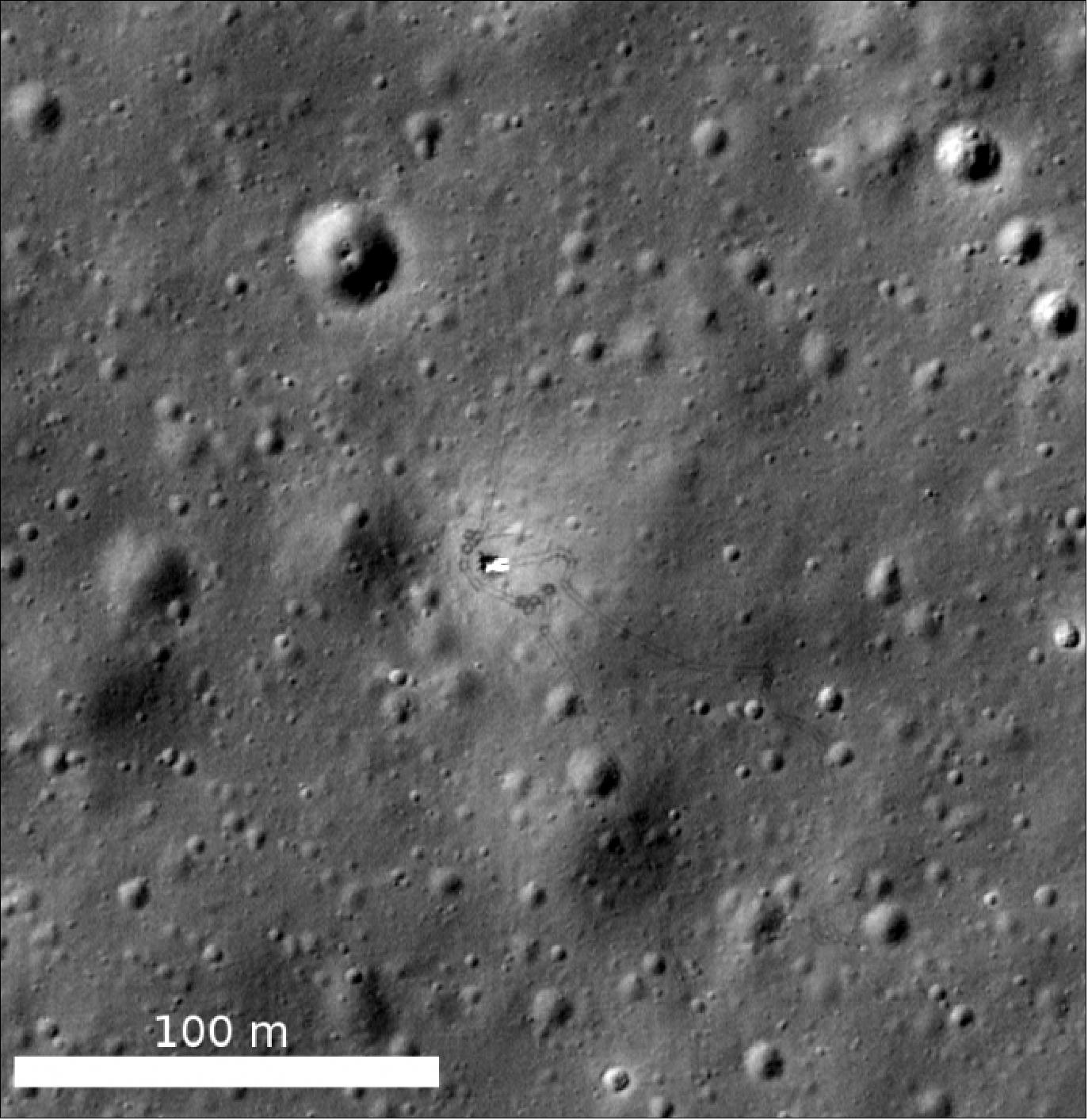
• On June 18, 2013, NASA's LRO (Lunar Reconnaissance Orbiter) was 4 years on orbit. Not only has LRO delivered all the information that is needed for future human and robotic explorers, but it has also revealed that the moon is a more complex and dynamic world than was expected. 70)
• January 2013: As part of the first demonstration of laser communication with a satellite orbiting the moon, scientists with NASA's LRO beamed an image of the Mona Lisa to the spacecraft from Earth. 71)
The image was transmitted in digital form from the NGSLR (Next Generation Satellite Laser Ranging) station at NASA/GSFC in Greenbelt, MD, to the LOLA (Lunar Orbiter Laser Altimeter) instrument on the spacecraft. By transmitting the image piggyback on laser pulses that are routinely sent to track LOLA's position, the team achieved simultaneous laser communication and tracking. This is the first time anyone has achieved one-way laser communication at planetary distances.
Precise timing was the key to transmitting the image. The Mona Lisa image was divided into an array of 152 x 200 pixels. Every pixel was converted into a shade of gray, represented by a number between zero and 4,095. Each pixel was transmitted by a laser pulse, with the pulse being fired in one of 4,096 possible time slots during a brief time window allotted for laser tracking. The complete image was transmitted at a data rate of about 300 bit/s (use of Reed-Solomon coding). LOLA reconstructed the image in the order the pixels were transmitted. The image was then sent back to Earth using radio waves.
This pathfinding achievement sets the stage for the LLCD (Lunar Laser Communications Demonstration), a high data rate laser-communication demonstrations that will be a central feature of NASA's next moon mission, the LADEE (Lunar Atmosphere and Dust Environment Explorer), a launch of LADEE is scheduled for the fall 2013.
LRO Science Objectives and Accomplishments
The science objectives for the LRO Science Mission addressed five specific themes.
1) The bombardment history of the Moon.
Developed an improved understanding of the ancient impactor populations that affected all the planets in the inner Solar System, through analysis of global high-resolution topography. Improved the age dating of landforms by using crater counts from the new high-resolution images with Sun angles and illumination geometry optimized for morphology.
2) Lunar geologic processes.
Discovered the global population of small-scale, relatively young compressional structures that show the Moon is in a general state of relatively recent contraction. Characterized volcanic complexes, such as Ina, which appear to result from inflated lava flows.
3) The processes that have shaped the global lunar regolith.
Determined the global distribution of regolith surface temperature and rock abundance. Discovered that impact melt occurs as pools in lunar craters as small as 170 m, and that rough subsurface melt may extend beyond the visible surface melt.
4) Characterization of the volatiles on the Moon with emphasis on the polar regions.
Discovered significant subsurface hydrogen deposits in sunlit areas as well as in some, but not all, permanently shadowed regions.
Measured surprising amounts of several volatiles (e.g. CO, H2, and Hg) in the gaseous cloud released from Cabeus by the LCROSS impact.
5) The Moon’s interaction with its external space environment.
Measured galactic cosmic ray interactions with the Moon during a period with the largest space age cosmic ray intensities. Created the first cosmic ray albedo proton map of the Moon.
• On Dec. 17, 2012, the LRO spacecraft witnessed the impact of the two GRAIL (Gravity Recovery and Interior Laboratory) spacecraft of NASA when they were intentionally crashed into a mountain near the moon's north pole. With just three weeks notice, the LRO team scrambled to get LRO in the right place at the right time to witness GRAIL's fiery finale. 73)
• August 2012: Scientists using the LAMP (Lyman Alpha Mapping Project) spectrometer on LRO, have made the first spectroscopic observations of the noble gas helium in the very rare atmosphere surrounding the moon. LAMP uses a novel method to peer into the perpetual darkness of the moon's so-called permanently shadowed regions. LAMP "sees" the lunar surface using the ultraviolet light from nearby space and stars, which bathes all bodies in space in a soft glow of ultraviolet light. -These remote-sensing observations complement in situ measurements taken in 1972 by the LACE (Lunar Atmosphere Composition Experiment) instrument deployed by Apollo 17. 74)
Although designed to map the lunar surface, the LAMP team expanded its science investigation to examine the far ultraviolet emissions visible in the tenuous atmosphere above the lunar surface, detecting helium over a campaign spanning more than 50 orbits. Because helium also resides in the interplanetary background, several techniques were applied to remove signal contributions from the background helium and determine the amount of helium native to the moon.
Overview of mission phases: LRO flexible mission operations enabled new discoveries 75)
• LRO was launched on June 18, 2009
- Spacecraft and instruments commissioned in a 30 x 200 km elliptical orbit
• Exploration Mission: 9/16/2009 - 9/16/2010
- a one-year mapping of the Moon to search for resources, identify safe landing sites, and measure the radiation environment
- quasi-circular polar orbit (50 ± 15km)
• Science Mission: 9/17/2010 - 9/16/2012
- more flexible operations for Planetary Science objectives
- quasi-circular orbit (50 ± 15km) until December, 2012
- in the summer of 2012 in a 30 x 200 km orbit
- through June 2012, LRO has delivered 325 TB of data into the PDS (Planetary Data System)
• Extended Science Mission: 9/17/2012 - 9/16/2014 (proposed)
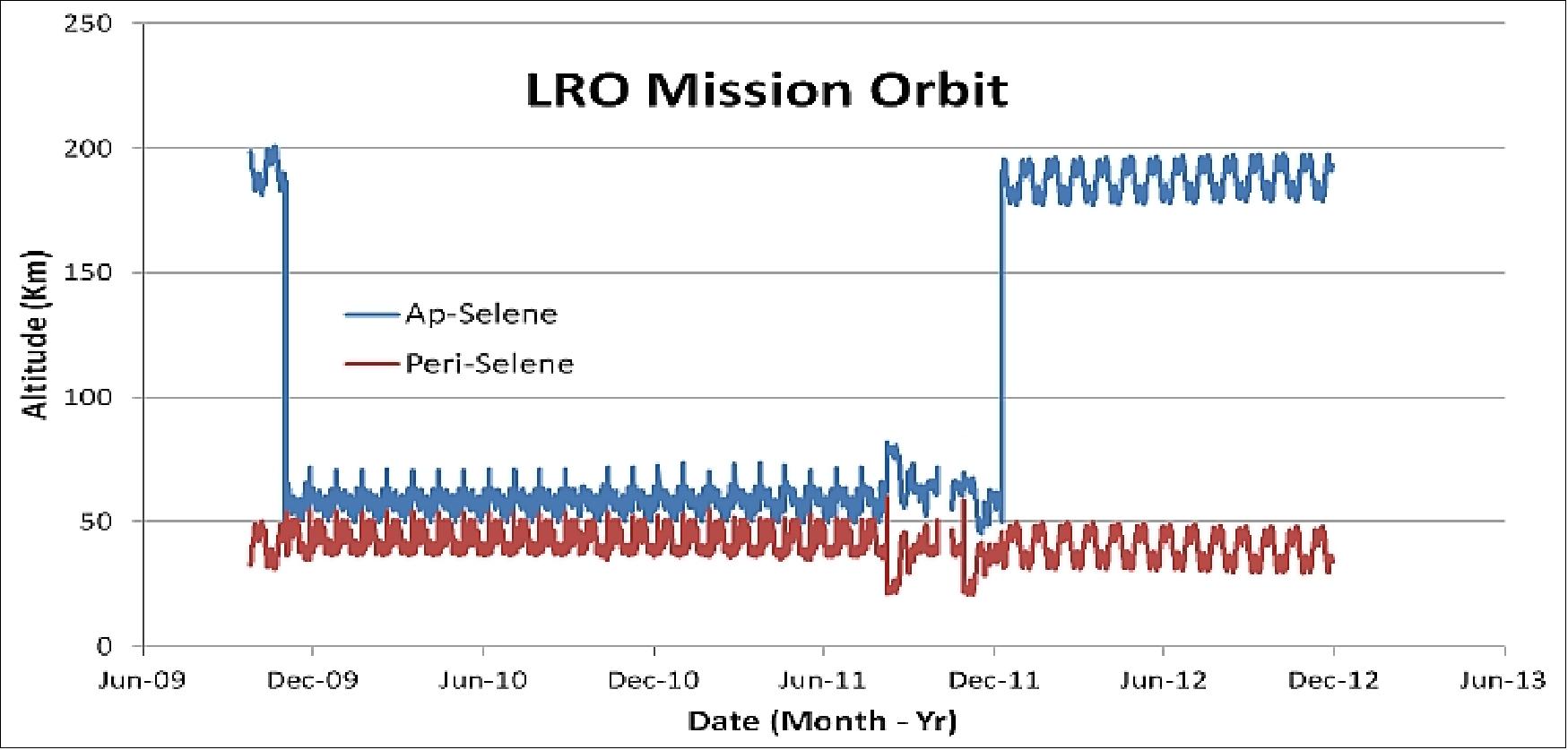
• June 2012: According to data from NASA's LRO mission, ice may make up as much as 22% of the surface material in the Shackleton crater located near the Moon's south pole. The huge crater, named after the Antarctic explorer Ernest Shackleton, is ~ 4 km deep and 21.5 km in diameter. The small tilt of the lunar spin axis means Shackleton's interior is permanently dark and very cold. Researchers have long thought that ice might collect there. 76) 77) 78)
When a team of NASA and university scientists used LOLA (Lunar Orbiter Laser Altimeter) data to examine the floor of the Shackleton crater, they found it to be brighter than the floors of other nearby craters around the South Pole. This is consistent with the presence of small amounts of reflective ice preserved by cold and darkness.
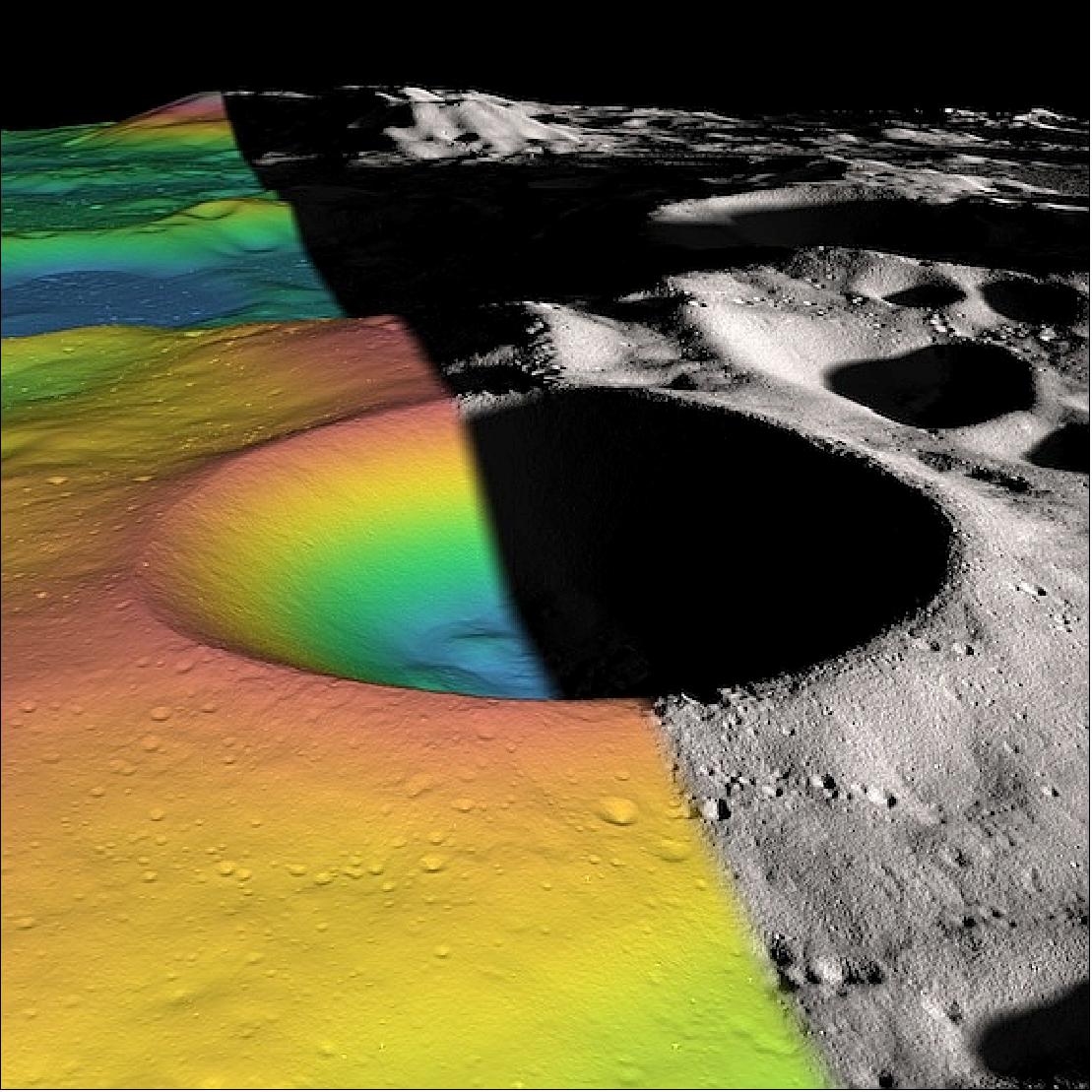
Legend to Figure 53: The structure of the crater's interior was revealed by a digital elevation model constructed from over 5 million elevation measurements from LOLA.
The LRO team was able to map the crater’s elevations and brightness in extreme detail, thanks in part to LRO’s path: The spacecraft orbits the moon from pole to pole as the moon rotates underneath. With each orbit, LOLA maps a different slice of the moon, with each slice containing measurements of both poles. The upshot is that any terrain at the poles — Shackleton crater in particular — is densely recorded. Zuber and her colleagues took advantage of the spacecraft’s orbit to obtain more than 5 million measurements of the polar crater from more than 5,000 orbital tracks. 79) 80)
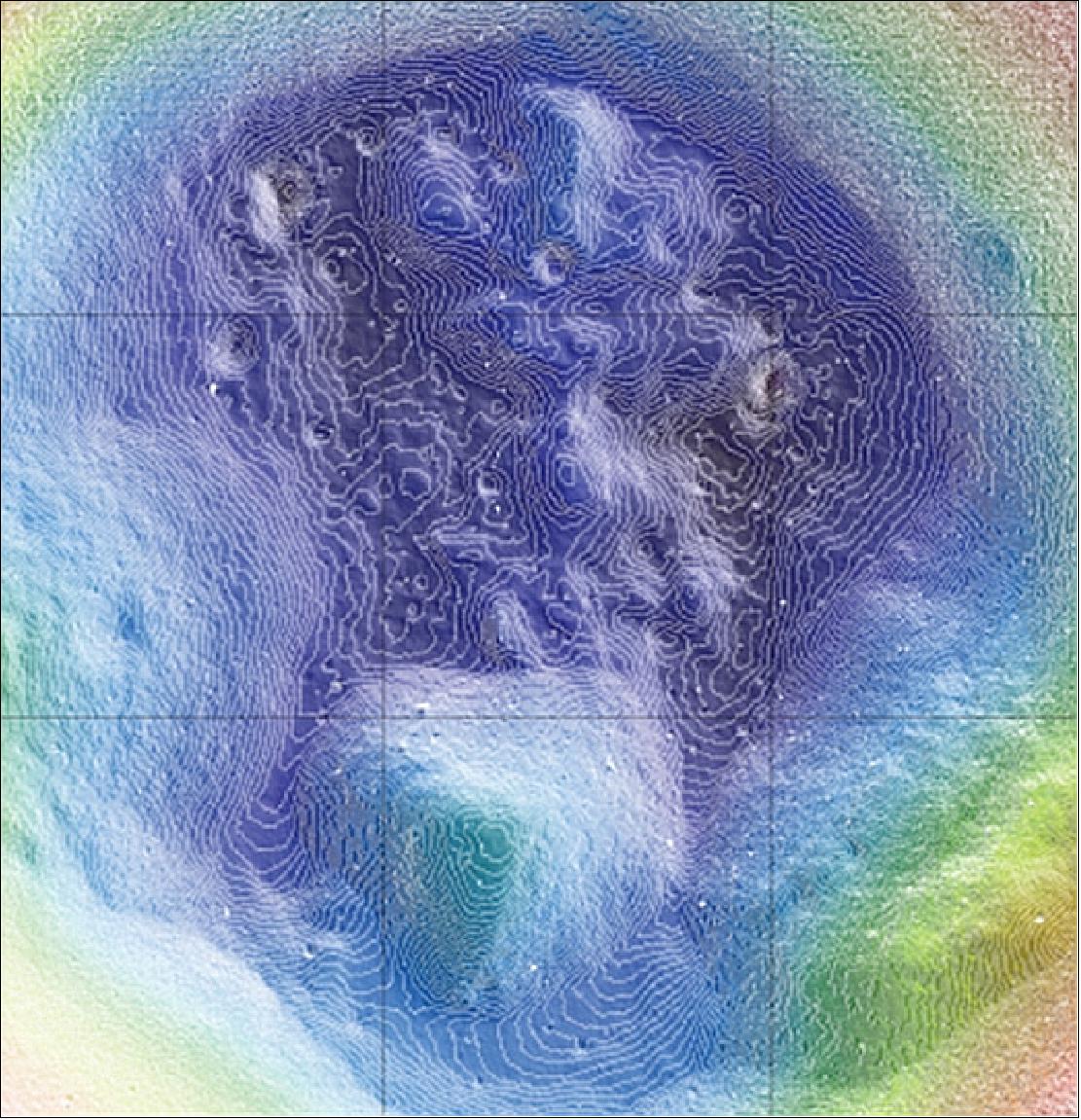
Legend to Figure 54: The contours of elevation are plotted every 5 m. The colors show relative elevation with purple lowest and yellow highest. The crater is 4.1 km deep. The spatial resolution of the topography is 10 m and the radial accuracy is < 1 m.
• The LRO spacecraft and its payload are operating nominally in 2012. The mission has been successfully transitioned from NASA's ESMD (Exploration Systems Mission Directorate), it will continue to perform science and measurements throughout 2012.
- New images acquired by the LRO spacecraft show that the Moon’s crust is pulling apart – at least in some small areas. The high-resolution images from LROC (Lunar Reconnaissance Orbiter Camera) provide evidence that the Moon has experienced relatively recent geologic activity (Figure 55). A team of researchers discovered small, narrow trenches typically only hundreds to a few thousand meters long and tens to hundreds of meters wide, indicating the lunar crust is being pulled apart at these locations. These linear troughs or valleys, known as “graben”, are formed when crust is stretched, breaks and drops down along two bounding faults. A handful of these graben systems have been found across the lunar surface. The team proposes that the geologic activity that created the graben occurred less than 50 million years ago (very recent compared to the Moon’s current age of over 4.5 billion years). 81) 82)
- On March 14, 2012, LRO was 1000 days in lunar orbit. 83)
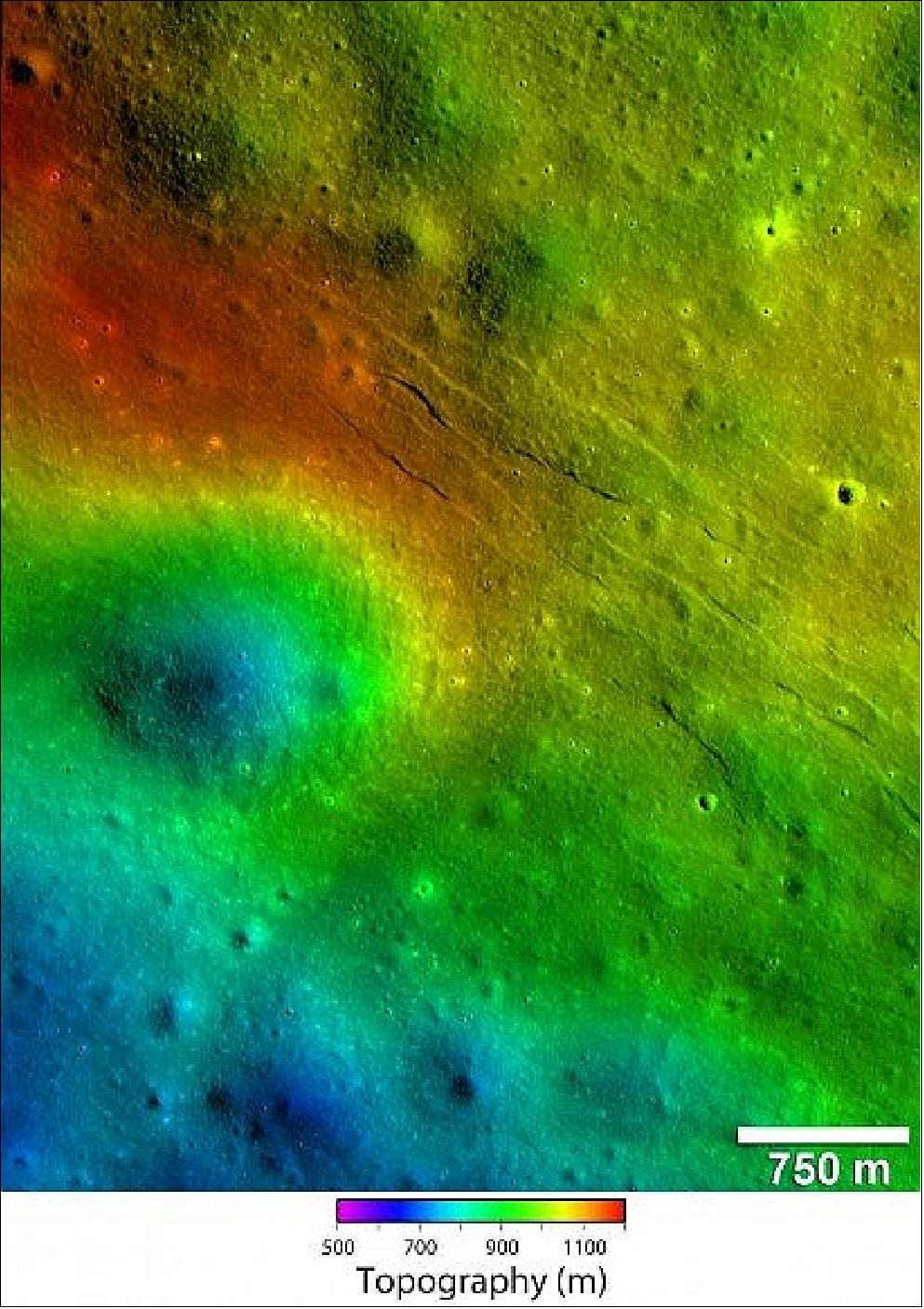
Legend to Figure 55: The graben are located on a topographic rise with several hundred meters of relief revealed in topography derived from LROC stereo images.
• In November 2011, the science team of NASA's LRO mission released the highest resolution near-global topographic map of the moon's farside ever created. 84) 85) 86)
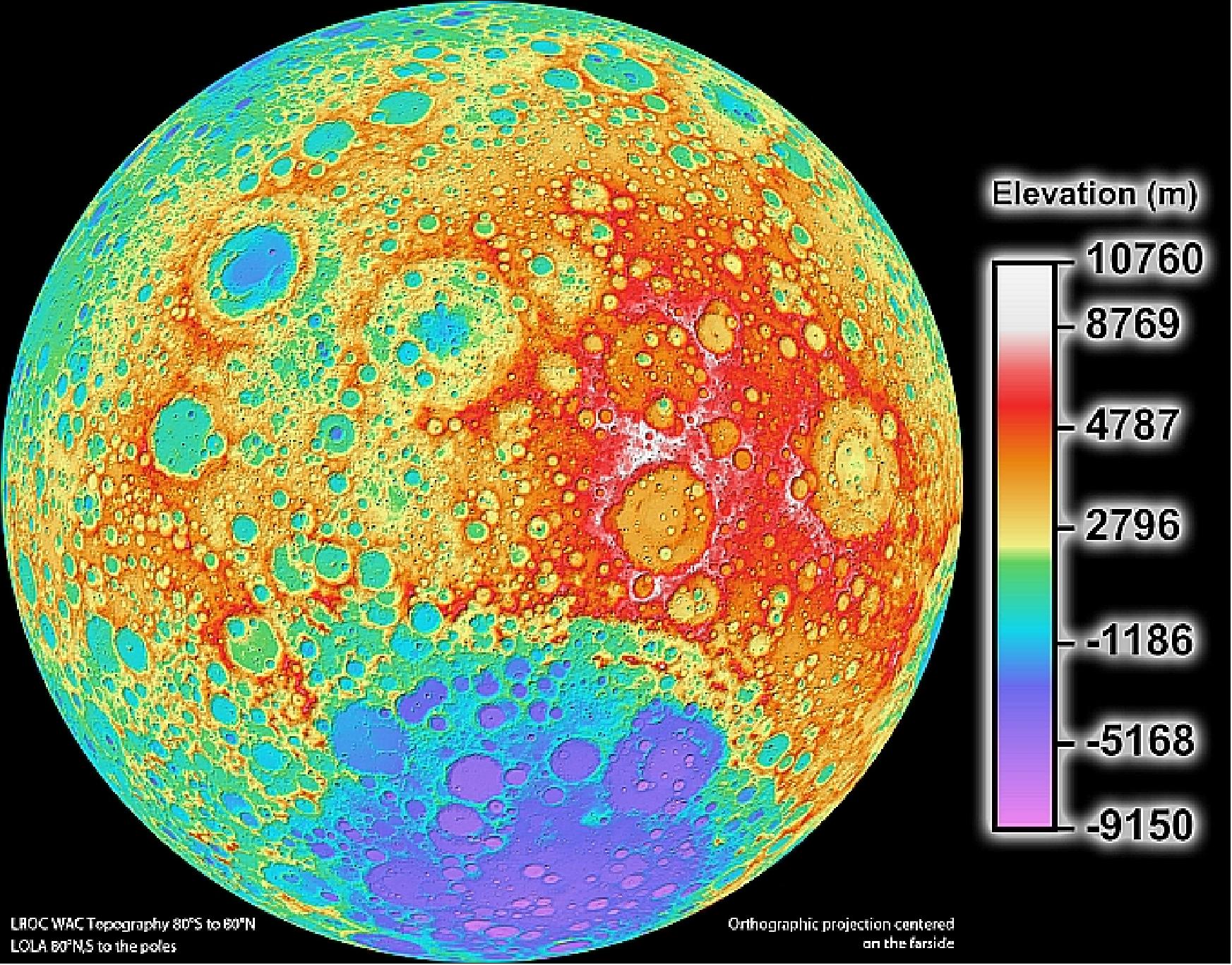
Legend to Figure 56: This new topographic map, from Arizona State University in Tempe, shows the surface shape and features over nearly the entire moon with a pixel scale close to 100 m. Called the Global Lunar DTM 100 m topographic model (GLD100), this map was created based on data acquired by LRO's WAC (Wide Angle Camera), which is part of the LROC imaging system.
During the period Aug. 10 to Sept. 6, 2011, the LRO orbit was adjusted by making it more elliptical. Two station-keeping maneuvers on Aug. 10 lowered LRO from its nominal altitude of ~50 km to an altitude that dipped as low as nearly 21 km (periapsis) as it passed over the moon's surface. The spacecraft remained in this elliptical orbit for 28 days, long enough for the moon to completely rotate. This allowed full coverage of the surface by LROC's WAC (Wide Angle Camera). At the end of the cycle (Sept. 6, 2011), the spacecraft returned to its nominal 50 ±15 km near-circular orbit with another set of station-keeping maneuvers. The main goal of the low-orbit lunar month was to obtain WAC coverage of the nearside mare at an average pixel scale of 50 m (or better). At the lowest altitudes, the LROC WAC pixel size decreases to < 40 m from the usual 75 m. High resolution imagery was also obtained by the NAC (Narrow Angle Camera) of LROC. The higher resolution imagery permitted also to examine three Apollo landing sites (Apollo 12, 14 and 17). Nominally the LRO orbits the Moon in a 50 km altitude, near-circular, polar orbit. The orbit is “near”-circular, as LRO’s altitude can vary between its lowest altitude (periapsis) of 35 km and its highest altitude (apoapsis) of 65 km over a twenty eight day period. |
Table 5: Low-altitude LRO orbit for higher resolution imagery 87) 88)
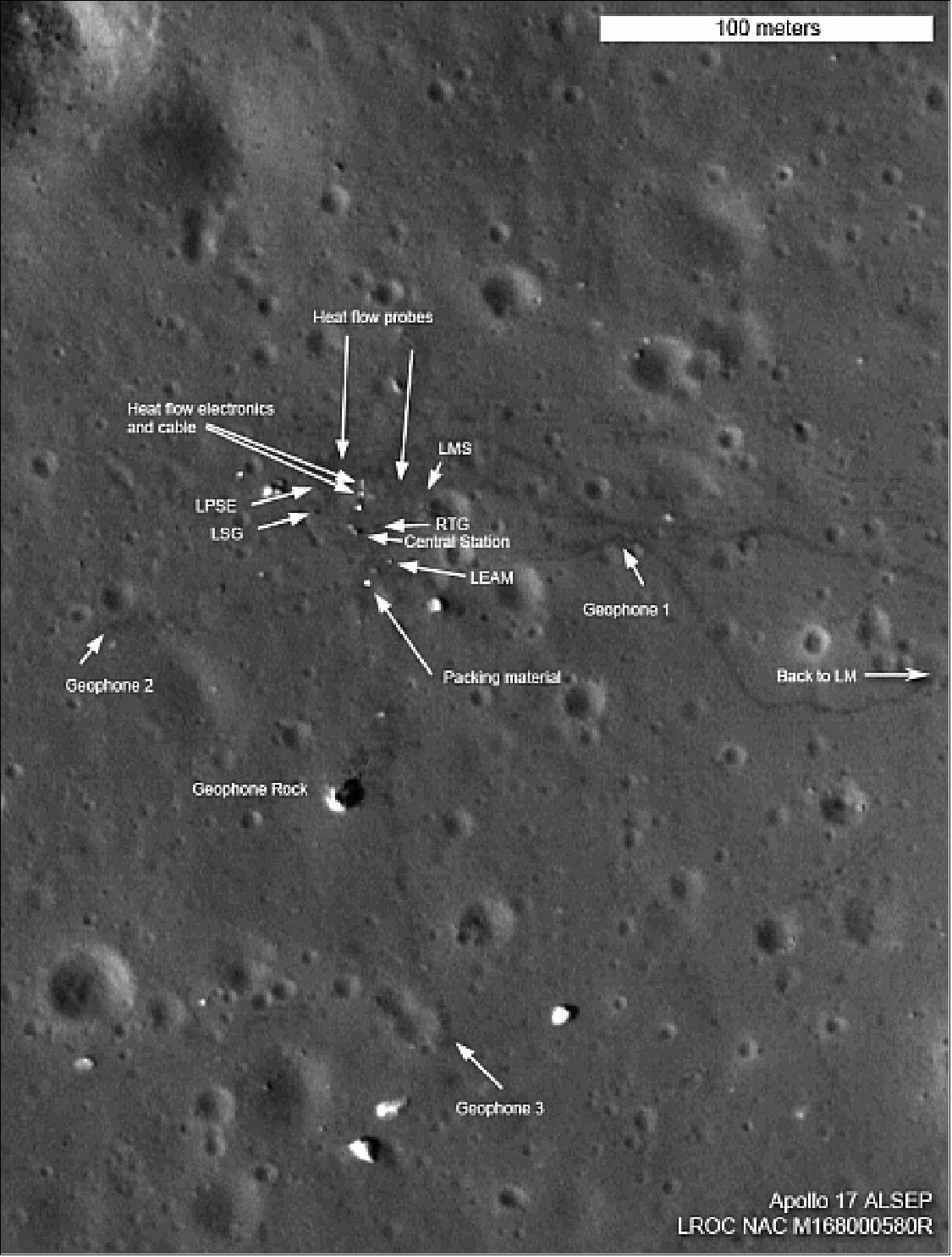
Legend: ALSEP (Apollo Lunar Surface Experiments Package), a portable scientific lab.
• In June 2011, NASA has declared full mission success for LRO after operating the spacecraft and its instruments for a one-year mission phase. Now that the final data from the instruments have been added to the agency's Planetary Data System, the mission has completed the full success requirements. The rich new portrait rendered by LRO's seven instruments is the result of more than 192 TB of data, images and maps, the equivalent of nearly 41,000 typical DVDs. 89)
- The LRO mission is ongoing with near continuous acquisition of science data.
- While studying the Hermite crater near the moon's north pole, LRO's Diviner Lunar Radiometer Experiment (DLRE) found the coldest spot in the solar system, with a temperature of 25 K.
• In May 2011, the following LR (Laser Ranging) results were presented at the 17th International Workshop on Laser Ranging, Bad Kötzting, Germany: (Ref. 127)
- One-way (uplink only) laser transponders have now been proven to work operationally (currently going on 2 years of operations)
- Two-way asynchronous transponders have been successfully demonstrated at planetary distances
- LRO-LR has been very successful thanks to support of ILRS
- LRO will be moved from 50 km circular mission orbit to reduced maintenance elliptical orbit late in 2011. LR is expected to continue at least through FY12.
• In April 2011, the PI of the Mini-RF instrument, Ben Bussey, is reporting that the anomaly of the instrument transmitter could not be fixed. Hence, the project was not able in collecting science data with the instrument anymore since the beginning of 2011.
- However, the rest of the Mini-RF is functioning nominally, and the project is investigating opportunities to conduct interesting science using Mini-RF in a “receive only” mode. One possibility is to conduct bistatic experiments, using the Arecibo Radio Telescope in Puerto Rico as the transmitter.
- Since entering lunar orbit in June 2009, Mini-RF has imaged over two thirds of the lunar surface, including more than 98% of both polar regions. 90)
• On March 15, 2011, the LRO team released the final set of data from the mission's exploration phase along with the first measurements from its new life as a science satellite. - Note: the science mission started after the exploration mission on Sept. 16, 2010 and is projected for two years. 91) 92)
- Among the latest products is a global map with a resolution of 100 m/pixel from the LROC (Lunar Reconnaissance Orbiter Camera). To enhance the topography of the moon, this map was made from images collected when the sun angle was low on the horizon. Armchair astronauts can zoom in to full resolution with any of the mosaics—quite a feat considering that each is 34,748 pixels by 34,748 pixels, or approximately 1.1 GByte.
- The complete data set contains the raw information and high-level products such as mosaic images and maps. The data set also includes more than 300,000 calibrated data records released by LROC. All of the final records from the exploration phase, which lasted from Sept. 15, 2009 through Sept. 15, 2010, are available through several of the Planetary Data System nodes and the LROC website.
• On Jan. 4, 2011, the Mini-RF instrument team for LRO found that the Mini-RF radar had suffered an anomaly and is not currently producing useful science data. Preliminary analysis indicates a possible fault in the Mini-RF radar transmitter. Mini-RF has suspended normal operations until analysis of the situation is completed. 93)
• In December 2010, NASA presented a most precise and complete map to date of the moon's complex, heavily cratered landscape. The digital elevation map was compiled with a dataset of LOLA (Lunar Orbiter Laser Altimeter). This dataset is being used to make digital elevation and terrain maps that will be a fundamental reference for future scientific and human exploration missions to the moon. While the current maps contain ~ 3 billion data points of LOLA so far, the project expects to continue these measurements for the next two years of the mission's science phase and beyond. 94)
The positional errors of image mosaics of the lunar far side, where direct spacecraft tracking (the most accurate) is unavailable, have been 1-10 km in the past. The LRO project is reducing these dimensions to a level of ≤ 30 m in the horizontal and to ≤ 1 m in the vertical plane. At the poles, where illumination rarely provides more than a glimpse of the topography below the crater peaks, the LRO project found systematic horizontal errors of hundreds of meters as well.
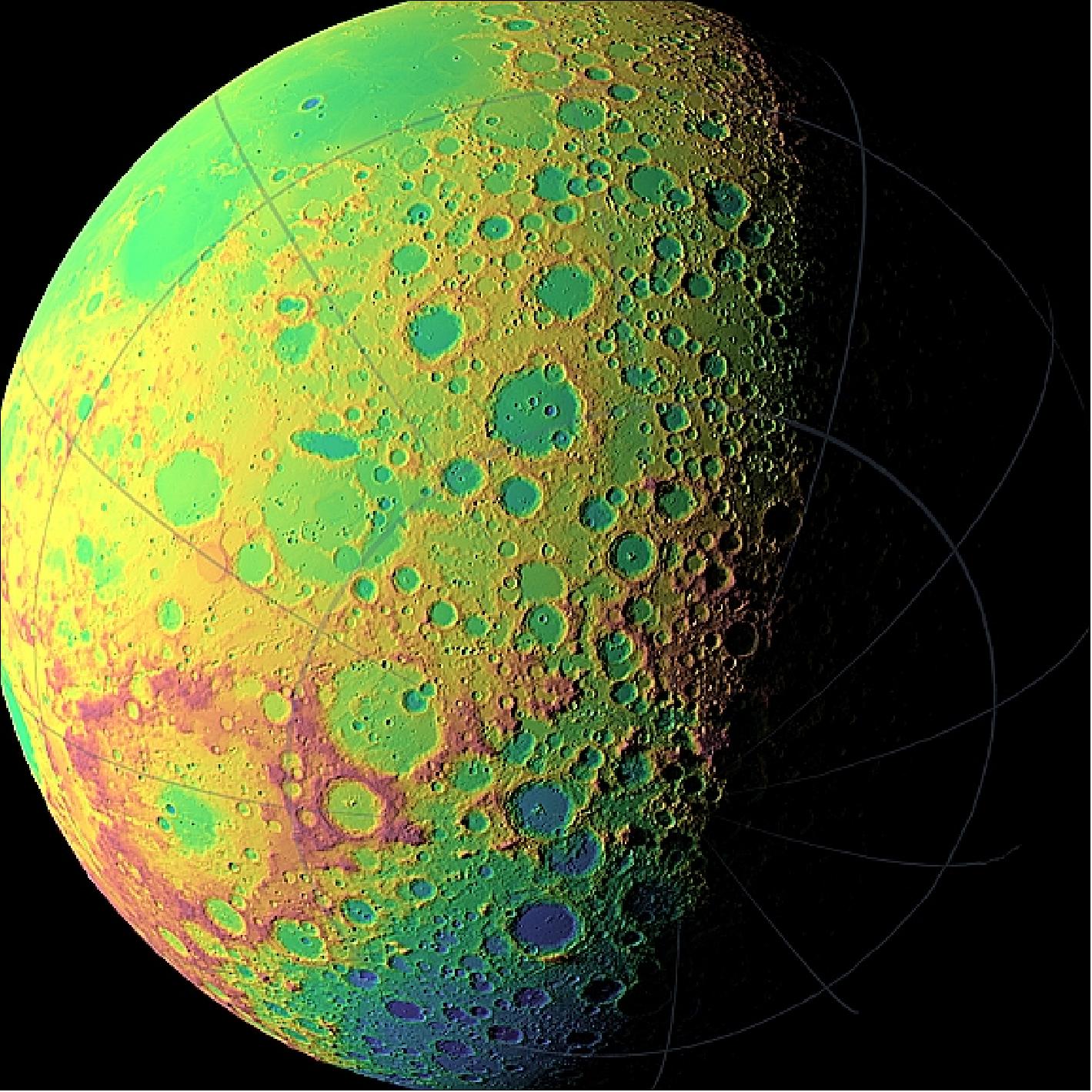
• The first 2-year extended mission phase of LRO started in mid-September 2010 for additional lunar science measurements supported by NASA’s Science Mission Directorate (SMD).
• The one-year “exploration phase” of the LRO mission was completed on Sept. 16, 2010, meeting all objectives. It produced a comprehensive map of the lunar surface in unprecedented detail; searched for resources and safe landing sites for potential future missions to the moon; and measured lunar temperatures and radiation levels.
The mission is now turning its attention from exploration objectives to scientific research.
• In the summer months of 2010, the Mini-RF instrument of LRO is about half way through its first high-resolution polar-mapping campaign. It is imaging within 20º latitude of both poles using its S-zoom mode. Recently, Mini-RF imaged a potentially ice-rich crater near the north pole of the moon. Located at 84ºN, 157ºW, this permanently shadowed crater, about 8 km in diameter, lies on the floor of the larger, more degraded crater Rozhdestvensky (177 km in diameter). With no sunlight to warm the crater floor and walls, ice brought to the moon by comets or formed through interactions with the solar wind could potentially collect here. 95) 96)
The crater was first identified as a region of interest with Mini-SAR, a NASA instrument flown on the Chandrayaan-1 mission of ISRO in 2009, when it was seen to exhibit unusual radar properties consistent with the presence of ice. But with a Mini-RF resolution 10 times better than the radar (Mini-SAR) aboard the Chandrayaan-1 spacecraft, Mini-RF allows the project to see details of the crater’s interior. In particular, the CPR (Circular Polarization Ratio) measures the polarization characteristics of the radar echoes, which give clues to the nature of the surface materials. The inset image in Figure 59 shows a "same-sense" radar image of the crater (left) next to a colorized CPR image of the crater. Red pixels have CPR values greater than 1.2. The CPR values inside the crater are almost all greater than 1, whereas the CPR values outside the crater are generally low (much less than 1). Regions with CPR greater than 1 are relatively rare in nature, but are commonly seen in regions with thick deposits of ice (such as the Martian polar caps, or the icy Galilean satellites). They are also seen in rough, blocky ejecta around fresh, young craters, but in that occurrence, scientists also observe high CPR outside the crater rim. This feature has high CPR inside its rim, but low CPR outside. The Mini-RF team plans to examine data from the other LRO instruments, particularly temperature and topographic measurements, to better characterize the environment and setting of these unusual features near the poles of the moon.
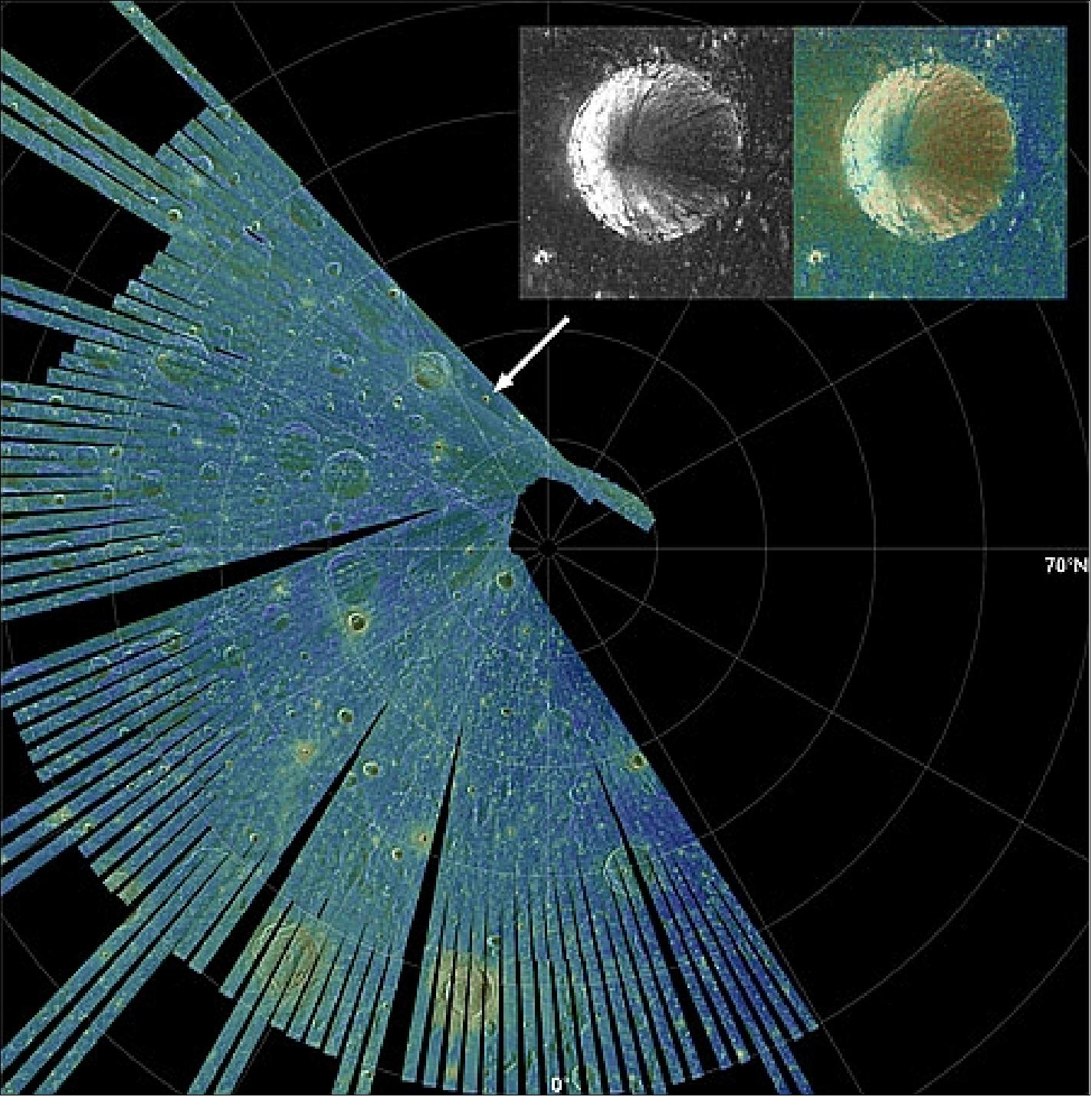
Using data from the NASA Mini-SAR instrument on the Chandrayaan-1 spacecraft of ISRO, scientists have detected ice deposits near the moon's north pole. Mini-SAR found more than 40 small craters with water ice (Figure 60). The craters range in size from 2 - 15 km in diameter. Although the total amount of ice depends on its thickness in each crater, it is estimated there could be at least 600 million metric tons of water ice. 97)
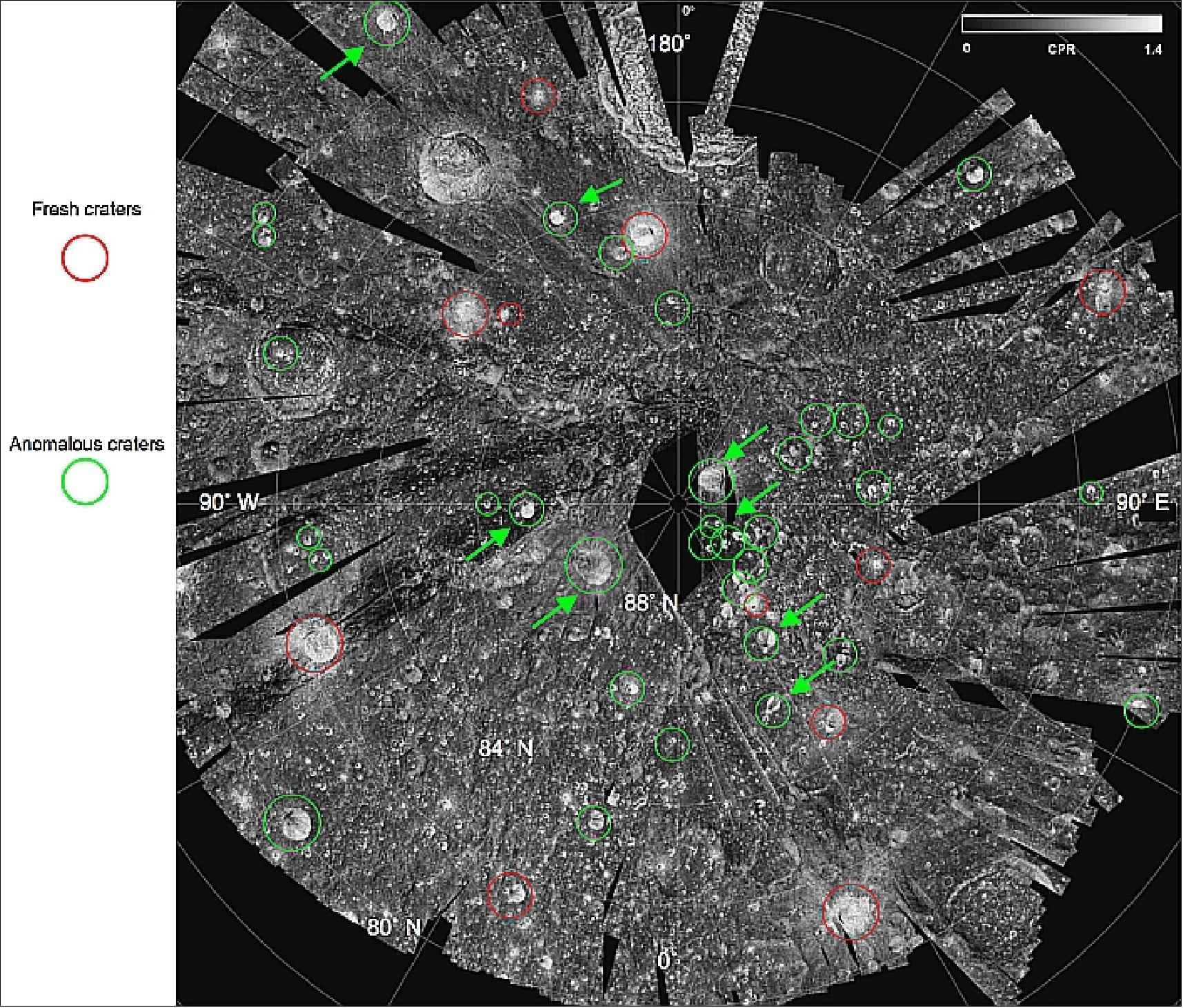
• On June 23, 2010, LRO has been one full year in lunar orbit. In this timeframe of the mission, LRO has gathered more digital information than any previous planetary mission in history. To celebrate one year in orbit, NASA provided a list of 10 cool things already observed by LRO. Among these items - the Diviner instrument of LRO measured a temperature of -248º C (or 35 K) in the floor of the moon's Hermite Crater. This represents the coldest place measured anywhere in the solar system. 98)
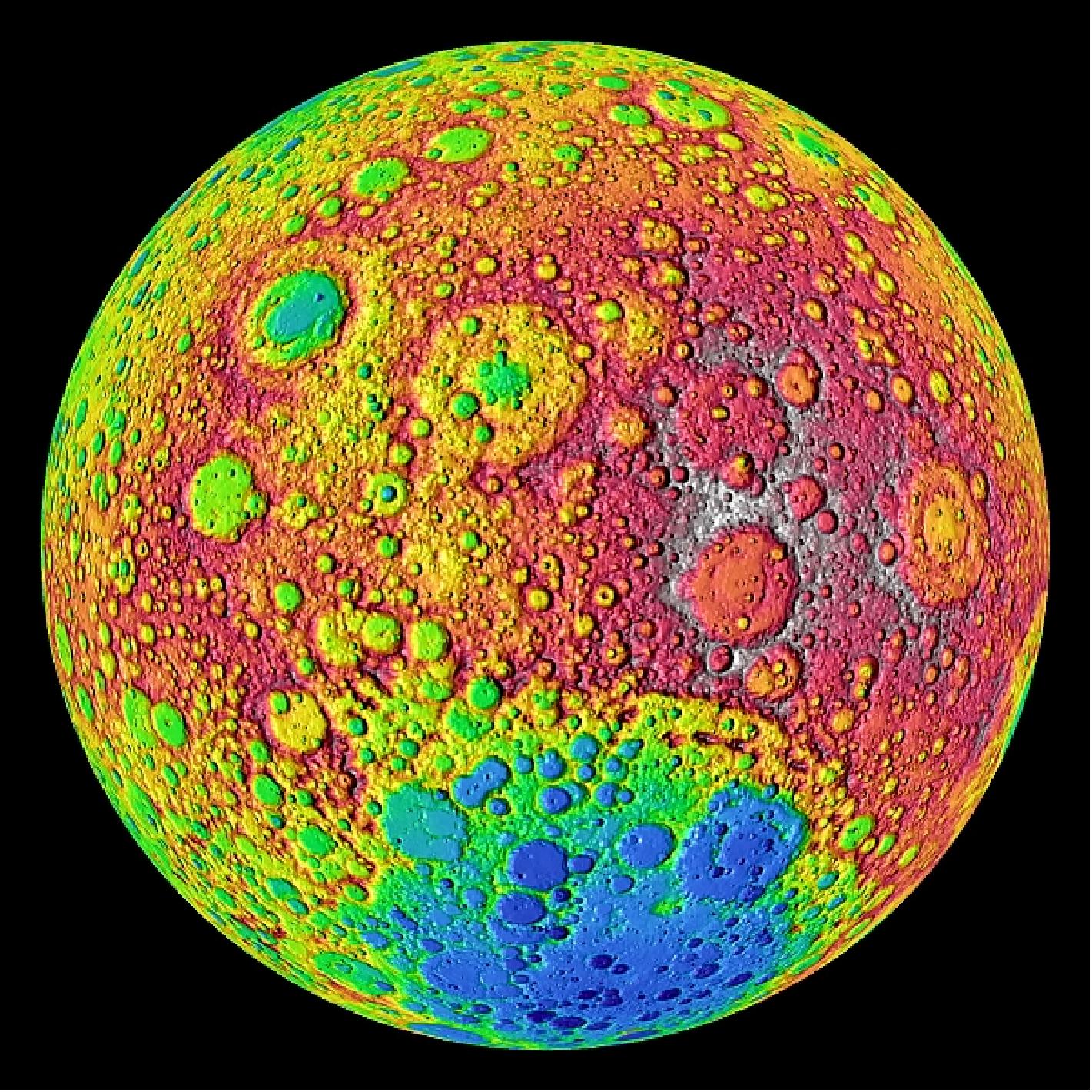
• The LRO spacecraft and its payload are operating nominally in 2010 in lunar orbit. LRO will have approximately 210 m/s of ΔV remaining after the 1-year nominal mapping mission is completed in mid-September of 2010. These reserves will be available for extended mission operations (Ref. 14).
• Rediscovery of the Russian Lunokhod-1 and -2 retroreflectors locations on the lunar surface (Luna 17 landed on the moon on Nov.17, 1970 releasing Lunokhod-1): Using LRO's mapping data, researchers at the UCSD (University of California San Diego) successfully pinpointed the location of a long lost light reflector on the lunar surface by bouncing laser signals from Earth to the Russian Lunokhod 1 retroreflector. The initial imaging of the two Russian rover locations, Lunokhod-1 and -2 were made in early 2010 by the LROC (Lunar Reconnaissance Orbiter Camera) team, led by Mark Robinson from Arizona State University in Tempe, AZ. 99) 100)
On April 22, 2010, Tom Murphy from UCSD and his team sent pulses of laser light from the 3.5 m telescope at the Apache Point Observatory in New Mexico, zeroing in on the target coordinates provided by the LROC images and altitudes provided by the LOLA (Lunar Orbiter Laser Altimeter). The new locations of Lunokhod-1 and -2 were quickly verified by the signal response from the retroreflectors.
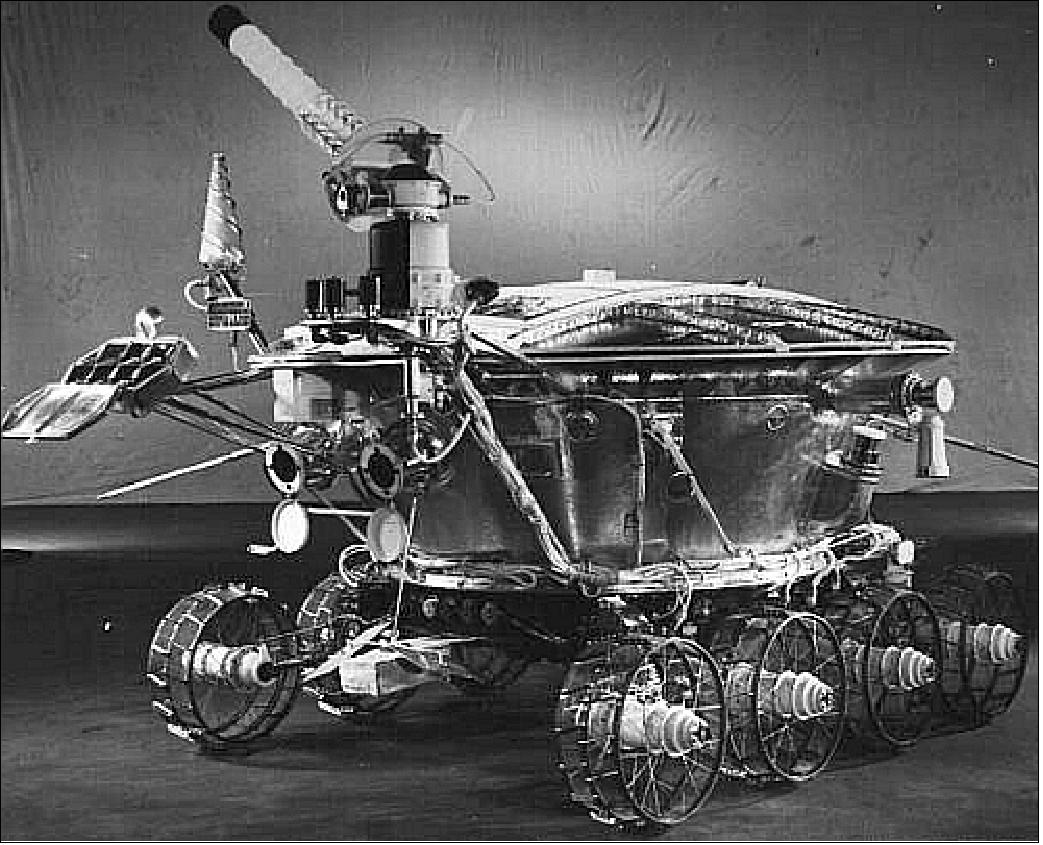
• At the end of 2009, LROC (Lunar Reconnaissance Orbiter Camera) has mapped in high resolution all the Apollo landing sites and 50 sites that were identified by NASA's Constellation Program to be representative of the wide range of terrains present on the moon (Figure 64). 101)
• The LRO mission played a major role in the support of the Oct. 9, 2009 LCROSS impact experiment. The role of LRO is to make detailed observations before, during, and after the LCROSS impact in a permanently shadowed crater near the lunar South Pole. The impact will occur within the highlands impact crater Cabeus on October 9, 2009. LRO has made detailed observations to support the LCROSS selection of this crater for the impact. The LRO team used laser altimetry data from both the LRO LOLA and JAXA Kaguya laser altimeters to determine regions of permanent shadows that would be the most likely regions to harbor frozen volatiles, if any are preserved in significant concentrations. The topography measurements also identified regions within the polar impact craters where the local slope is sufficiently small to maximize the transfer of kinetic energy from LCROSS impact into the lunar regolith target. LRO’s LEND neutron spectrometer provided maps of enhanced hydrogen concentrations that could indicate water ice embedded in the upper meter of the lunar regolith. LRO Diviner temperature measurements of the South Polar region were used to reveal the extremely low temperatures of cold traps that can potentially preserve volatiles in ice form. Mini-RF dual-frequency radar polarization imaging provided information that indicates the blockiness of the impact site and which can be used to further test for the presence of significant water ice on the basis of anomalous scattering behavior. These combinations of LRO measurements as well as other factors led the LCROSS team to choose the south polar crater Cabeus for its impact target. Before the impact occurs the Cabeus target area will be exhaustively observed by the LRO LROC, LOLA, and Mini-RF instruments in detail to characterize the pre-impact geology. 102)
• NASA has successfully completed its testing and calibration phase and entered its mapping orbit of the moon on Sept. 17, 2009. The spacecraft already has made significant progress toward creating the most detailed atlas of the moon's south pole to date. Scientists released preliminary images and data from LRO's seven instruments. 103) 104)
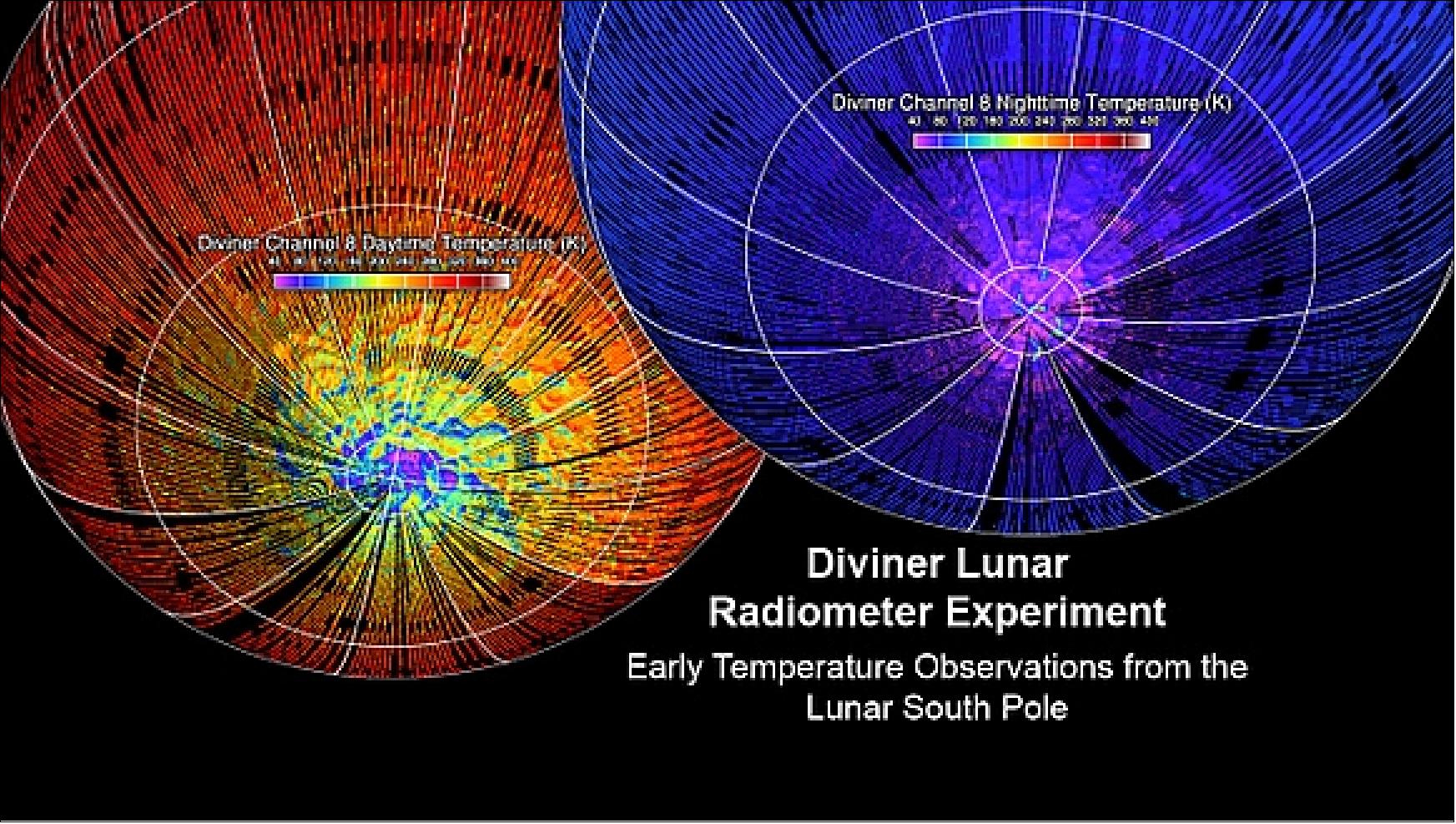
• On Sept. 15, 2009 the LRO orbiter spacecraft was moved into a polar-inclination of 89.7º circular 50 km mean altitude orbit for a planned one-year duration to execute its baseline ESMD (Exploration Systems Mission Directorate) mission phase, the so-called “Exploration Mission”. The orbital period is typically 113 minutes. This polar orbit allows repetitive measurements at high latitudes, producing a dense net of observations. Since the Moon rotates once each sidereal month, successive groundtracks are separated by about 31 km at the equator. Observations accumulated during the one-year Exploration Mission result in complete global coverage.
LRO has already proved its keen eyes, imaging fine details of the Apollo landing sites in August with the LROC (Lunar Reconnaissance Orbiter Camera) imager. - During the nominal mission phase, the Maneuver Team designed maneuvers to allow for the successful viewing of the LCROSS impact on October 9, 2009. Maneuvering LRO for the LCROSS impact viewing included many iterations and re-plans to adapt to changing requirements for viewing the impact (Ref. 14).
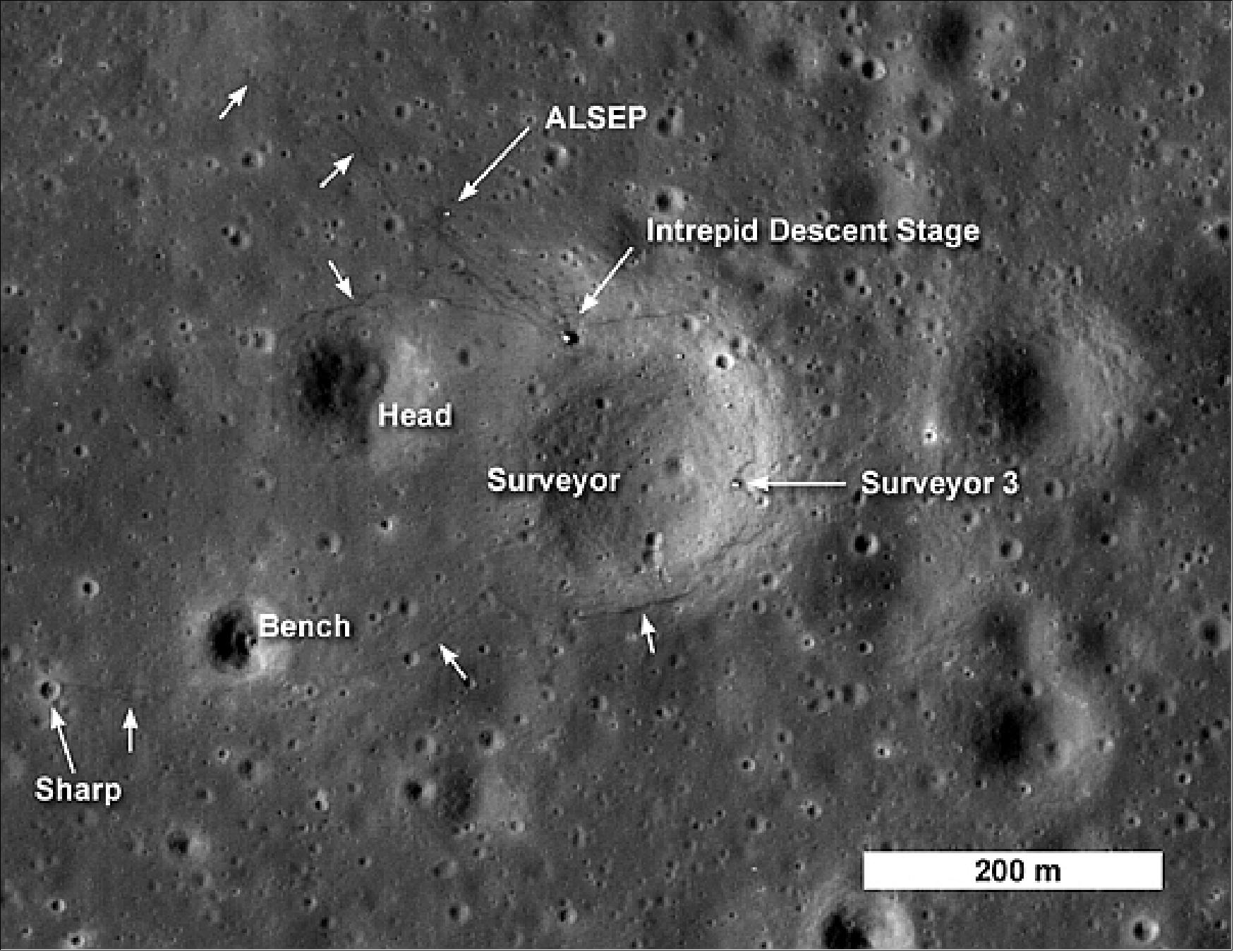
Legend: Figure 64 of LROC (Lunar Reconnaissance Orbiter Camera) shows the spacecraft's first look at the Apollo 12 landing site (Apollo-12 was launched in Nov. 1969). The Intrepid lunar module descent stage, the experiment package ALSEP (Apollo Lunar Surface Experiment Package), and Surveyor 3 spacecraft are all visible. Astronaut footpaths are marked with unlabeled arrows. This image is 824 m in width. 106)
• During the commissioning phase, it was determined that LRO could perform coordinated observations with the ISRO (Indian Science Research Organization’) spacecraft Chandrayaan-1 (launched on October 22, 2008). As part of its instrument suite, Chandrayaan-1 carried the MiniSAR instrument – a synthetic aperture radar and sister instrument to LRO’s Mini-RF instrument. The goal for the coordinated observation was to perform a bistatic SAR experiment whereby Chandrayaan-1 would transmit from MiniSAR into a lunar South Pole crater and both Chandrayaan-1 and LRO would attempt to receive the return signal with their sister instruments. The experiment would attempt to find water ice in Erlanger Crater (Longitude: 29.16º, Latitude: -87.01º), one of the permanently shadowed craters at the lunar South Pole.
The experiment took place on August 20, 2009 with the corresponding instruments’ sensor footprints overlapping over the Erlanger crater for roughly 35 seconds. The close approach between the satellites was approximately 22.5 km, a majority of the difference being in the radial direction. After analyzing the encounter data, ISRO determined that, due to deteriorating spacecraft hardware, Chandrayaan-1 was not pointing at the Erlanger Crater during the experiment time. - A second attempt using a different crater was being investigated when communications were lost with Chandrayaan-1 on August 29, 2009 and the Chandrayaan-1 mission was terminated (Ref. 14).
• The first two successful SLR passes between a terrestrial ground station and a spacecraft orbiting the moon were obtained on July 1, and July 2, 2009 between the NGSLR station at Greenbelt, Maryland, USA, and the LRO (Lunar Reconnaissance Orbiter).
• On June 30, 2009 the LROC NAC and WAC cameras were activated. The cameras are working well and have returned first images of a region a few kilometers east of Hell E crater in the lunar highlands south of Mare Nubium. 107)
• On June 23, 2009, 4 1/2 days after launch, LRO has successfully entered orbit around the moon. During transit to the moon, engineers performed a mid-course correction to get the spacecraft in the proper position to reach its lunar destination. 108)
Sensor Complement
The spacecraft payload consists of six instruments and one technology demonstration to perform investigations specifically targeted for preparing for future human exploration. The instruments are provided by various organizations in the United States, one is from Russia. 109)
Instrument | Mass allocation (kg) | Power orbit average allocation (W) |
CRaTER | 6.4 | 5.9 |
Table 2: Summary of LRO instrument mass and power allocations
Instrument name | Instrument type | Characteristic range | Characteristic resolution | Spatial resolution from 50 km orbit | Spatial coverage | Data rate (Gbit/day) |
LOLA | Laser altimeter | Range window 20-70 km | 10 cm vertical | Five 5 m laser spots, 25 m spacing | Polar grid 0.001º latitude, 0.04º longitude | 1.4 |
LROC NAC | High resolution camera | Broadband centered at 550 nm | ±150 nm | 50 cm/pixel | Targeted >10% lunar surface, 100% > 85.5º lat. | 515 |
LROC WAC | Multispectral camera | 315-680 nm | Spectral filters centered at 315 nm 360 nm, 415 nm, 560 nm, 600 nm, 640 nm, 680 nm | 100 m/pixel VIS | Full lunar surface at each wavelength and various lighting angles | 41 |
LEND | Neutron detector | Thermal to 15 MeV | Four bands | Epithermal 10 km | Full lunar surface and deep space | 0.26 |
DLRE | Radiometer | 30-400 K | 5 K | 400 m | Full lunar surface day/night temperatures | 3.5 |
LAMP | UV imaging spectrograph | 52 to 187 nm | 3.5 nm | 260 m | Full lunar surface | 2 |
CRaTER | Primary and albedo cosmic ray sensor | LET spectra 0.2 keV/µm to 7 MeV/µm | <3% | 77 km | Full lunar surface and deep space | 7.8 (peak) |
Mini-RF | X- and S-band SAR | 4 cm (X-band) | Sensitivity: -30 dB (S), -25 dB (X) | 75 m/pixel, 7.5 m/pixel (zoom) | Limited during the nominal mission | 7.7 (for 4 min observations) |
Table 3: Overview of the LRO instrument complement
CRaTER (Cosmic Ray Telescope for the Effects of Radiation):
CRaTER PI: Harlan E. Spence, UNH (University of New Hampshire), Durham, NH. The primary goal is to characterize the global lunar radiation environment and its biological impacts. The instrument consists of a single, integrated sensor and electronics box with simple electronic and mechanical interfaces to the spacecraft. The CRaTER sensor frontend design is based on standard stacked-detector, cosmic ray telescope systems. 110)
The objective of CRaTER is to measure LET (Linear Energy Transfer) spectra produced by incident galactic cosmic rays (GCRs) and solar energetic protons (SEPs). GCRs and SEPs with energies >10 MeV have sufficient energy to penetrate even moderate shielding. CRaTER is designed to return the following required data products:
• Measure and characterize that aspect of the deep space radiation environment, LET spectra of galactic and solar cosmic rays (particularly above 10 MeV), most critically important to the engineering and modeling communities to assure safe, long-term, human presence in space.
• Investigate the effects of shielding by measuring LET spectra behind different amounts and types of areal density, including tissue-equivalent plastic.
The CRaTER telescope consists of five ion-implanted silicon detectors (red areas in Figure 67), mounted on four detector boards (green areas), and separated by three pieces of tissue-equivalent plastic, hereinafter referred to as TEP (tan areas). All five of the silicon detectors are 2 cm in diameter. 111) 112) 113)
Low LET (Light Emitting Transistor) detectors | 9.6 cm2 circular, 1000 µm thick. 0.2 MeV threshold |
High LET detectors | 9.6 cm2 circular, 140 µm thick. 2 MeV threshold |
TEP (Tissue-Equivalent Plastic) absorber 1 | 5.4 cm cylinder |
TEP absorber 2 | 2.7 cm cylinder |
Zenith FOV (Field of View) | 35º, 6 detector coincidence |
Nadir FOV | 75º, for D3D4D5D6 coincidence |
Geometric factor | 0.1 cm2 sr (D1D2 events) |
LET range | 0.2 - 7 MeV/µm (Si) |
Incident particle energy range | > 20 MeV (H), > 87 MeV/nucleon (Fe) |
Table 8: Parameters of CRaTER
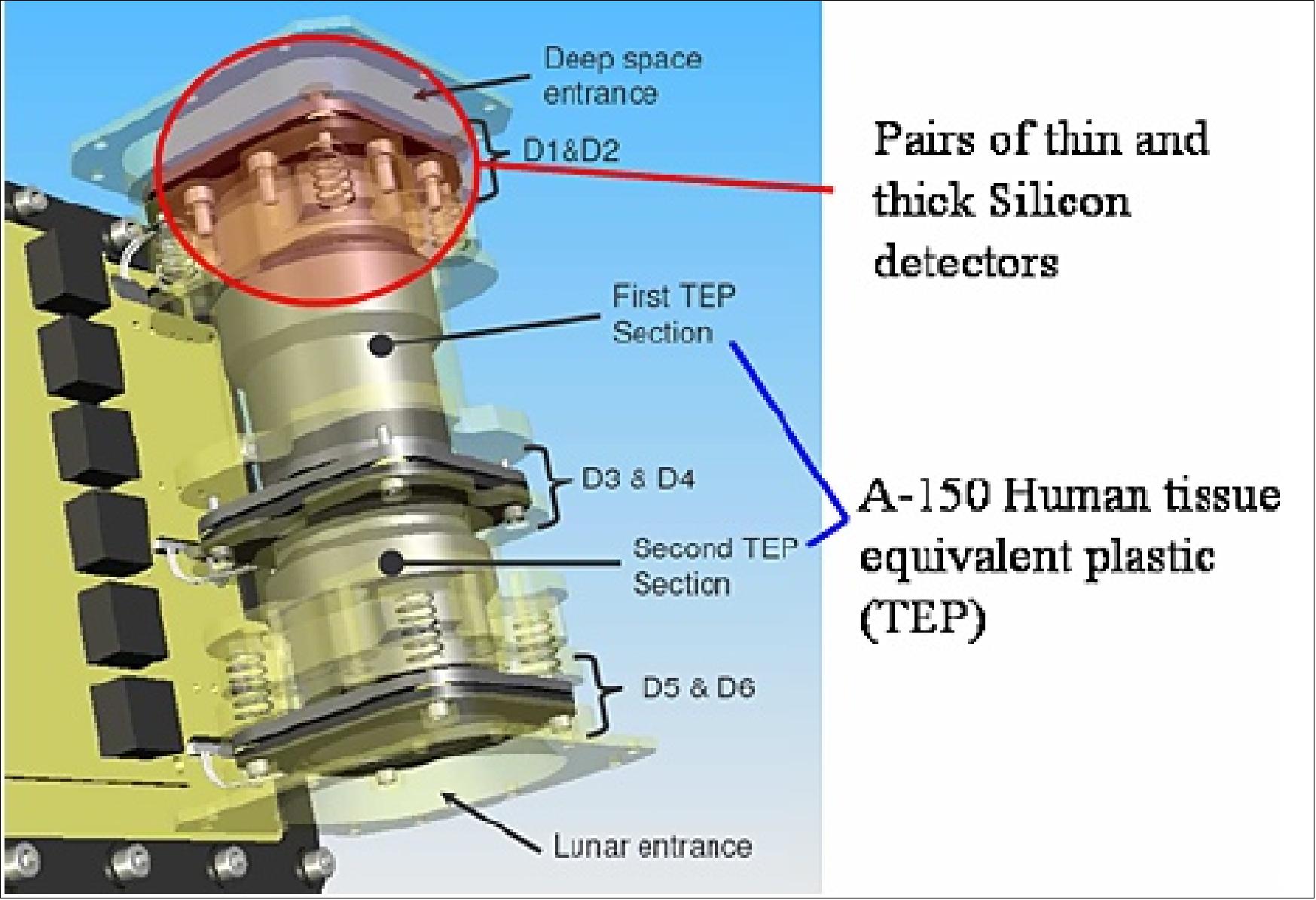
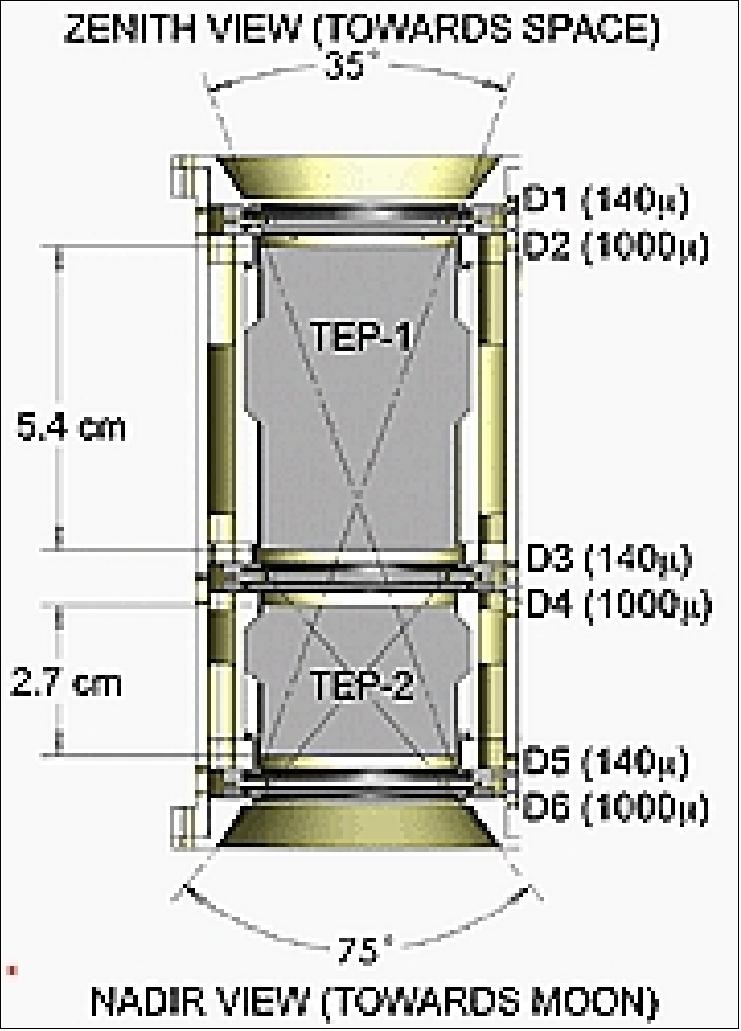
Legend to Figure 66: The detectors (D1-D6) are made of silicon, the TEPs are composed of hydrogen, carbon, nitrogen, oxygen, fluorine, and calcium, in a tissue-equivalent mixture (A-150 plastic). The end caps are made of aluminum.
CRaTER is composed of three sets of detectors. The first set of detectors consists of thin silicon (140 µm thick) followed by a second, thicker detector (1000 µm thick). Thin detectors primarily detect particles with a high LET while thick detectors primarily detect low LET particles. Sandwiched between each of the three pairs of detectors is a slab of A-150 tissue-equivalent plastic (TEP). The first silicon detector pair D1 and D2 is on the zenith end, which faces away from the lunar surface out into deep space.
Then there is a 5.4 cm long section of TEP, followed by another detector pair D3 and D4, followed by 2.7 cm long section of TEP, and the final detector pair D5 and D6.
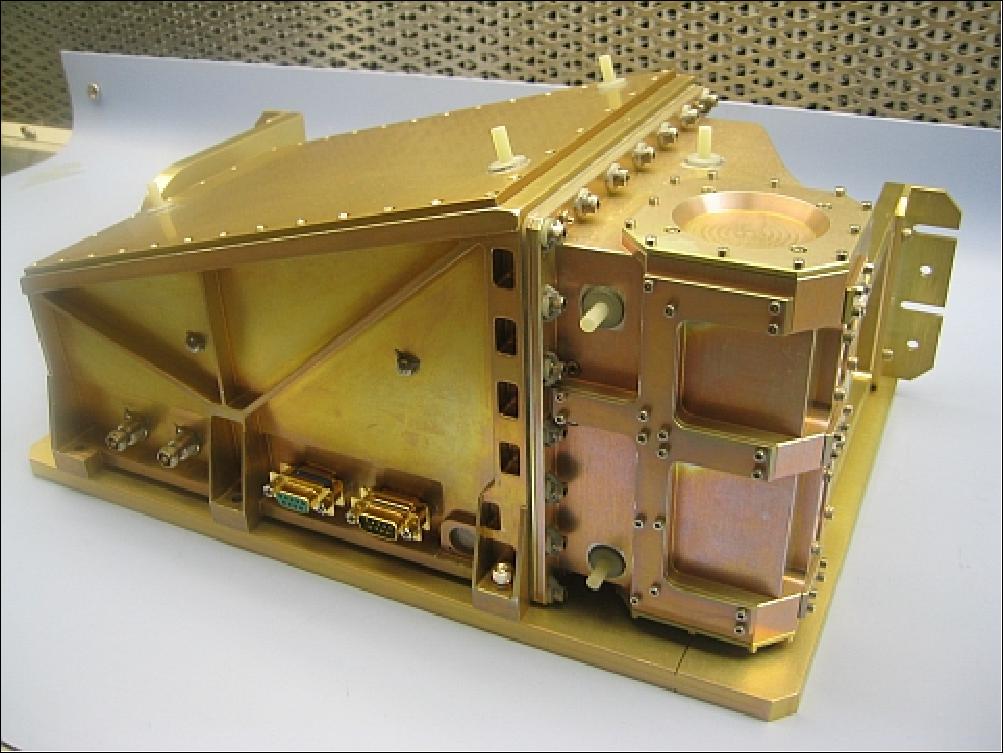
DLRE (Diviner Lunar Radiometer Experiment):
DLRE PI: D. Paige, UCLA. The overall objective is to measure the lunar surface thermal environment (temperatures) at scales that provide essential information for future surface operations and exploration (resolution 300 m). DLRE is a a multi-channel (9 channels) solar reflectance and infrared filter radiometer utilizing uncooled thermopile detector arrays. DLRE's spectral channels are distributed between two identical, boresighted telescopes, and an articulated elevation/azimuth mount allows the telescopes to view the lunar surface, space, and calibration targets. The IFOV response of each channel is defined by a linear, 21-element, thermopile detector array at the telescope focal plane, and its spectral response is defined by a focal plane bandpass filter.
The DLRE structure consists of an instrument optics bench assembly (OBA), an elevation/azimuth yoke, and an instrument mount. The OBA contains all of the instrument optical subassemblies, and is suspended from the yoke. Elevation and azimuth motors mounted on the yoke drive instrument articulation. The OBA is temperature controlled, and internal temperature gradients are minimized by design. Radiometric calibration is provided by views of blackbody and solar targets mounted on the yoke. The electronics subassemblies control signal processing, instrument operation and articulation, command processing, and data processing and are distributed between the OBA and the yoke. 115)
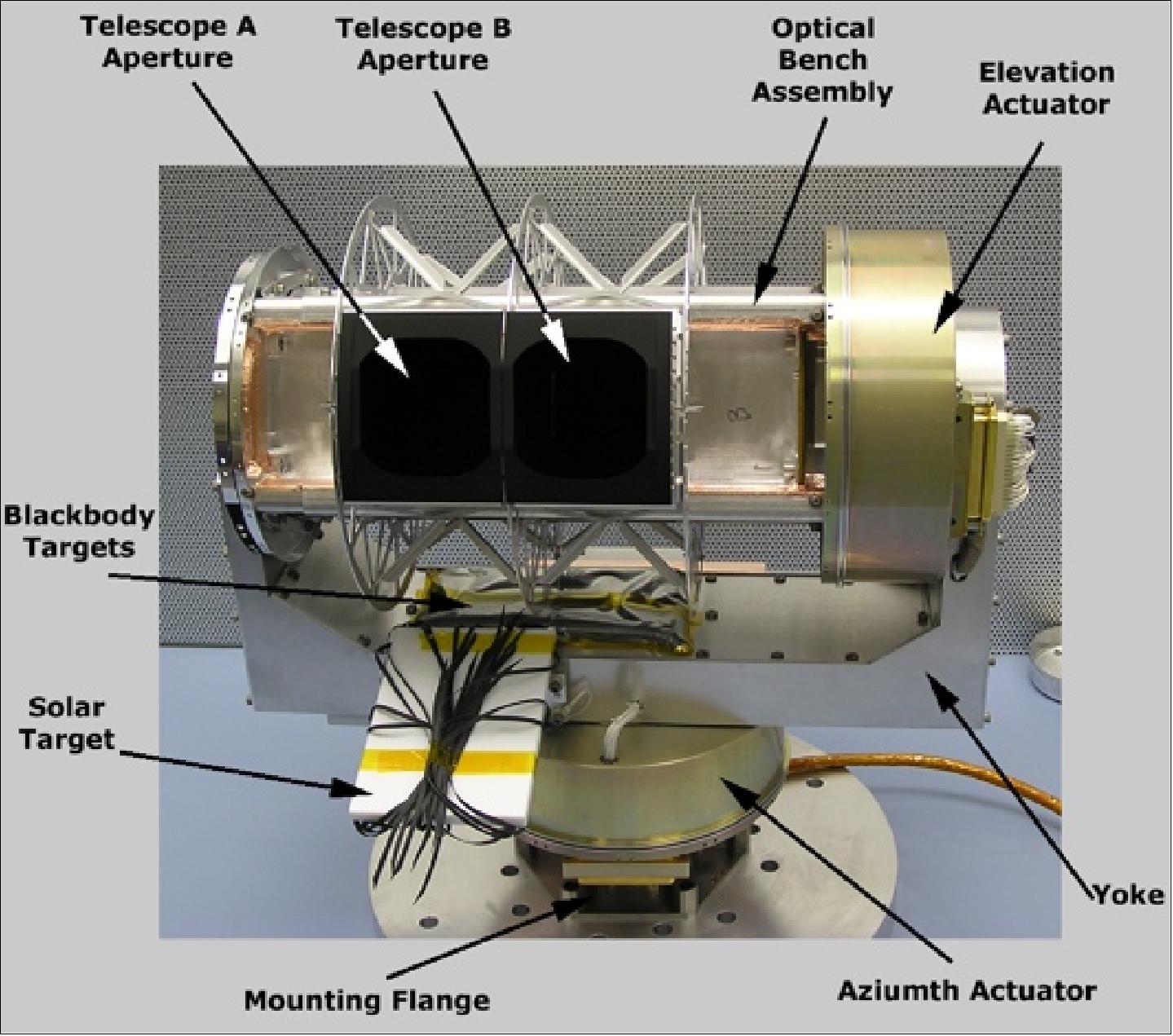
The operation of DLRE is continuously in nadir pushbroom mapping mode using 21 detectors cross-track for each of its nine spectral channels. The FOV of each detector is 3.6 mrad cross track, yielding a resolution of 180 m on the lunar surface at an orbital altitude of 50 km. To facilitate spatial registration of DLRE's surface footprints in multiple spectral bands, and to reduce along-track smear, the integration period will be 0.128 seconds. The mapped data products will generally be at a resolution of ~500 m/pixel to increase the SNR (Signal-to-Noise Ratio), and to allow for anticipated errors in the reconstruction of the position and pointing of the LRO spacecraft.
Telescope | Channel No | Minimum wavelength (µm) | Maximum wavelength (µm) | Purpose of observation | Minimum detectable signal |
A | 1 | 0.3 | 3 | Solar reflectance in permanently shadowed regions | 40 K* |
| 2 | 0.3 | 3 | Solar reflectance in sunlit regions | 55 K* | |
| 3 | 7.88 | 8.13 | Thermal emission near Christiansen feature | 160 K | |
| 4 | 8.13 | 8.38 | Thermal emission near Christiansen feature | 160 K | |
| 5 | 8.38 | 8.63 | Thermal emission near Christiansen feature | 160 K | |
| 6 | 12.5 | 25 | Thermal mapping | 75 K | |
B | 7 | 25 | 50 | Thermal mapping | 45 K |
| 8 | 50 | 100 | Thermal mapping | 32 K | |
9 | 100 | 200 | Thermal mapping | 30K |
Table 9: Spectral channel parameters of the DLRE instrument
Note: * is the intensity of reflected radiation from an isotropic reflector with broadband solar albedo of 0.1 in thermal equilibrium at the quoted temperature.
LAMP (Lyman-Alpha Mapping Project):
LAMP PI: A. Stern, SwRI (Southwest Research Institute), San Antonio, TX. The LAMP instrument is an imaging UV spectrometer. The objectives of LAMP are: 116)
• LAMP will be used to identify and localize exposed water frost in PSRs (Permanently Shadowed Regions)
• Provision of landform mapping (using Lyman-α albedos) in and around the PSRs of the lunar surface
• Demonstrate the feasibility of using starlight and UV sky-glow for future night time and PSR surface mission applications
• Assay the lunar atmosphere and its variability.
Viewing in the nadir direction from LRO, LAMP measures the signal reflected from the nightside lunar surface and PSR (Permanently Shadowed Regions) using Lyman-α skyglow and UV starlight as a light source. The LAMP data are taken entirely in pixel list (i.e., time tagged) mode, allowing mapping at a variety of resolutions. The reflectance data yield albedo maps of PSRs, the spectra of PSRs yield exposed water frost abundances, and the atmospheric spectra yield species abundances and variability.
Instrument mass, power | 5.0 kg, 4.3 W (each with reserves) |
Heritage | Pluto-ALICE UV Spectrograph, no new technologies |
Lifetime | 2 year (required), 5 year (goal) |
Passband | 1200-1800 Å |
Effective area | 0.4 cm2 @ 1216 Å (Lyman-α) |
IFOV (Slit FOV) | 0.2º x 6º |
Spectral resolution | < 20 Å FWHM (Full Width Half Maximum) across passband |
Spatial resolution | <1º (Nyquist sampled,PSF) |
Filled slit spectral resolution | < 40 Å FWHM average across passband |
Stray light | < 10-5 at 7º off-axis |
Maximum count rate | > 15 kHz (~50% deadtime loss) |
Dark count rate | < 50 counts/s (total array) |
Detector output | Continuous pixel list |
Table 10: Summary of the LAMP instrument parameters
The LAMP instrument is of ALICE heritage flown on the Rosetta mission of ESA and the New Horizon mission of NASA. LAMP is comprised of a telescope and Rowland-circle spectrograph. LAMP has a single 40×40 mm2 entrance aperture that feeds light to the telescope section of the instrument. Entering light is collected and focused by an f/3 off-axis paraboloidal (OAP) primary mirror at the back end of the telescope section onto the instrument's entrance slit. After passing through the entrance slit, the light falls onto a toroidal holographic diffraction grating, which disperses the light onto a double-delay line (DDL) microchannel plate (MCP) detector. The 2D pixel format detector (1024 x 32) is coated by a CsI solar-blind photocathode and has a cylindrically curved MCP stack that matches the Rowland-circle. LAMP is controlled by an Intel 8052 compatible microcontroller, and utilizes lightweight, compact, surface mount electronics to support the science detector, as well as the instrument support and interface electronics.
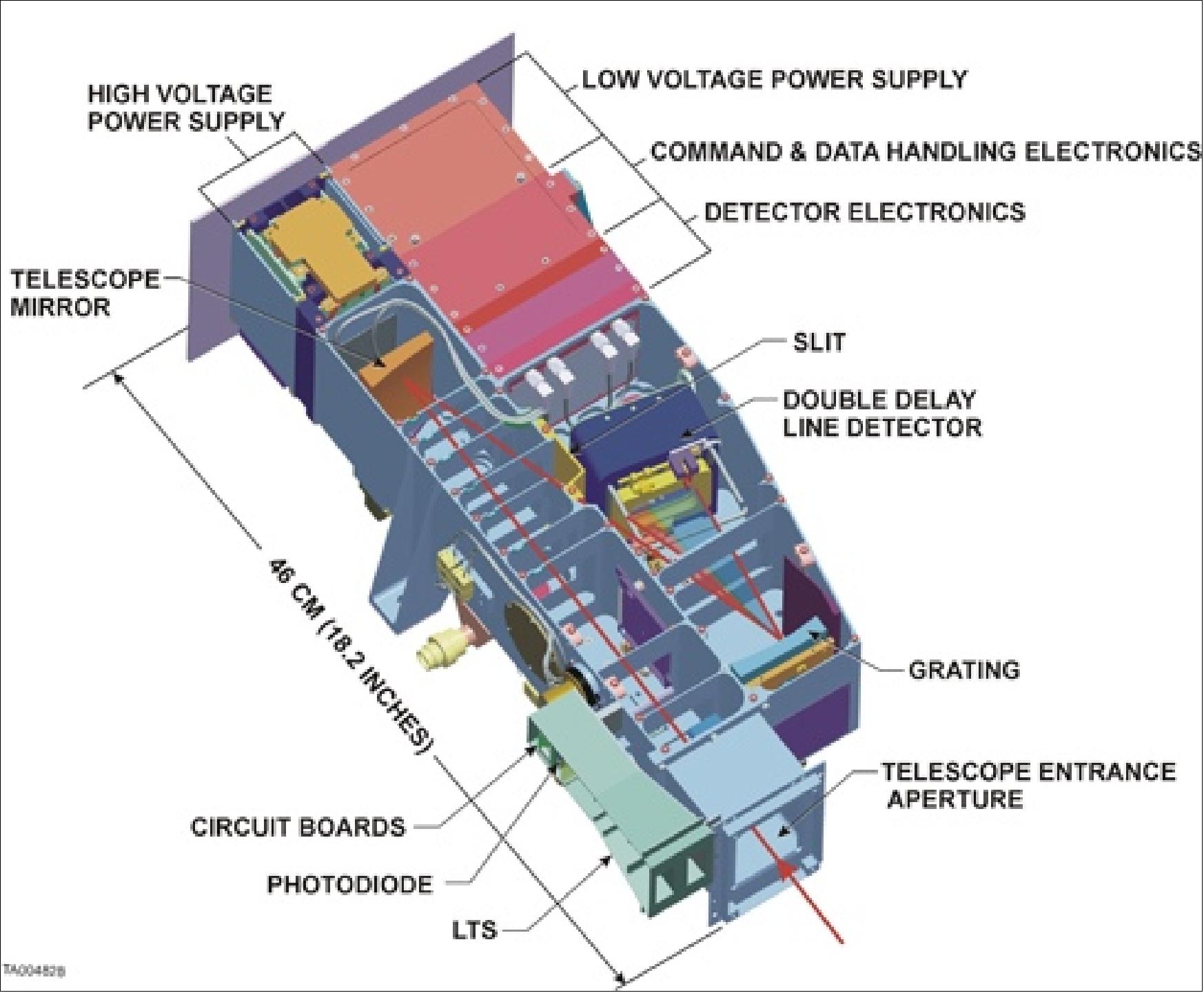
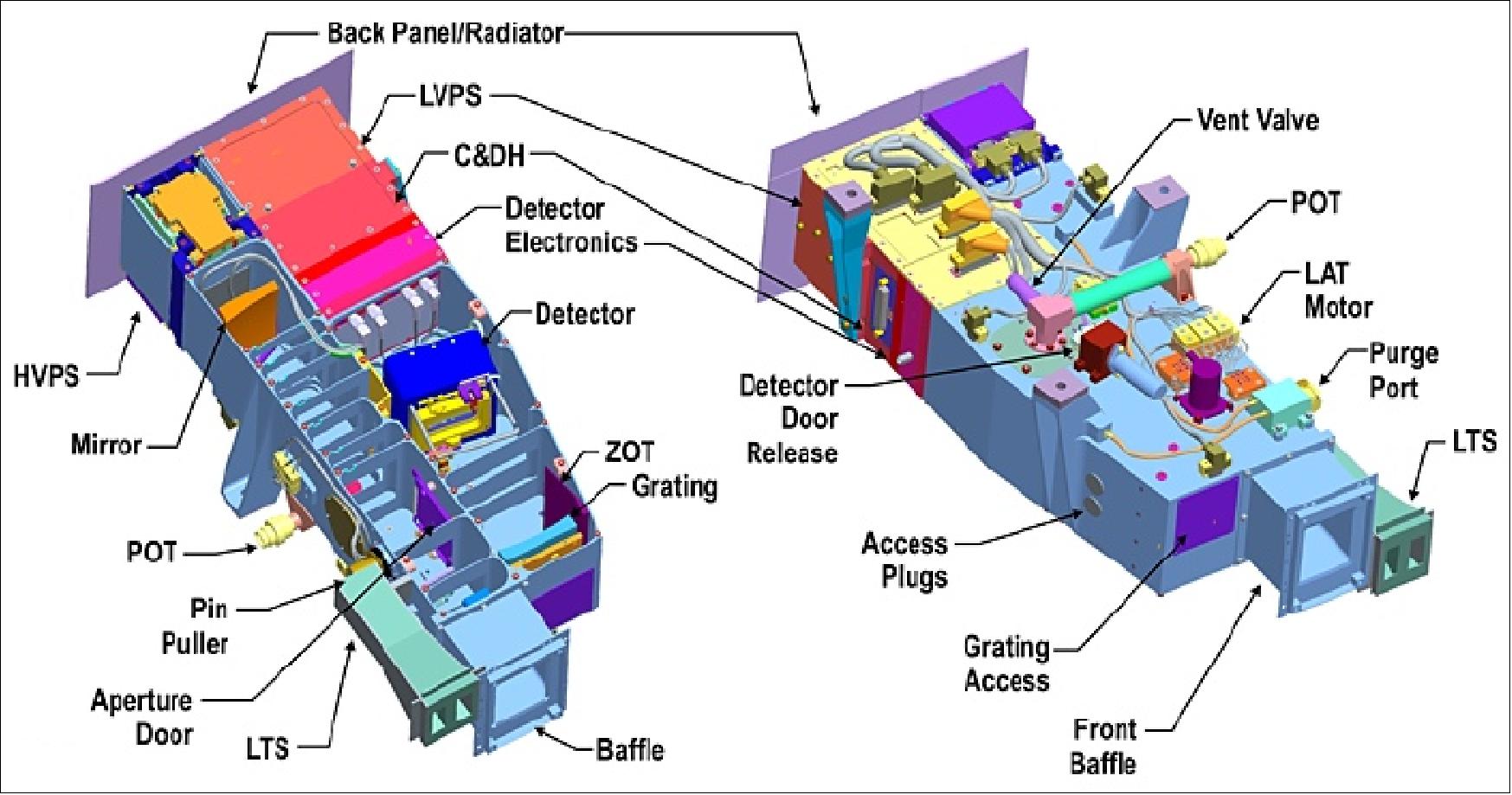
LEND (Lunar Exploration Neutron Detector):
LEND is a contributed instrument of the Federal Space Agency of Russia (Roskosmos). In addition, there are many collaborators in the project from inside and outside of Russia. The LEND instrument PI is Igor Mitrofanov of IKI (Space Research Institute), Moscow. The LEND investigations are based on the detection of the moon's neutron albedo. Specific objectives are to provide: 117) 118) 119) 120)
• High resolution hydrogen distribution maps with sensitivity of about 100 ppm of hydrogen weight and a horizontal spatial resolution of 5 km
• Characterization of surface distribution and column density of possible near-surface water ice deposits in the moon's polar cold traps
• Creation of a global model of neutron component of space radiation at altitude of 30-50 km above moon's surface with spatial resolution of 20-50 km at the spectral range from thermal energies up to 15 MeV.
LEND is capable of providing high spatial resolution mapping of epithermal neutrons with collimated epithermal neutron detectors. LEND is able to detect a hydrogen-rich spot at one of the lunar poles with as little as 100 ppm of hydrogen and a spatial resolution of 10 km (pixel diameter), and to produce global measurements of the hydrogen content with a resolution of 5–20 km. If the hydrogen is associated with water, a detection limit of 100 ppm hydrogen corresponds to ~ 0.1% weight water ice in the regolith. High energy neutron data from another LEND sensor could help to distinguish between areas in which hydrogen was implanted by solar wind and potential water ice deposits.
LEND features a full set of sensors for thermal (STN 1-3), epithermal (SETN) and high energy neutrons (SHEN) to provide data for neutron components of radiation environment in the broad range of more than 9 decades of energy. The LEND instrument design is based on the Russian HEND (High Energy Neutron Detector), which continues to perform well in its fifth year of science measurements onboard NASA's Mars Odyssey mission.
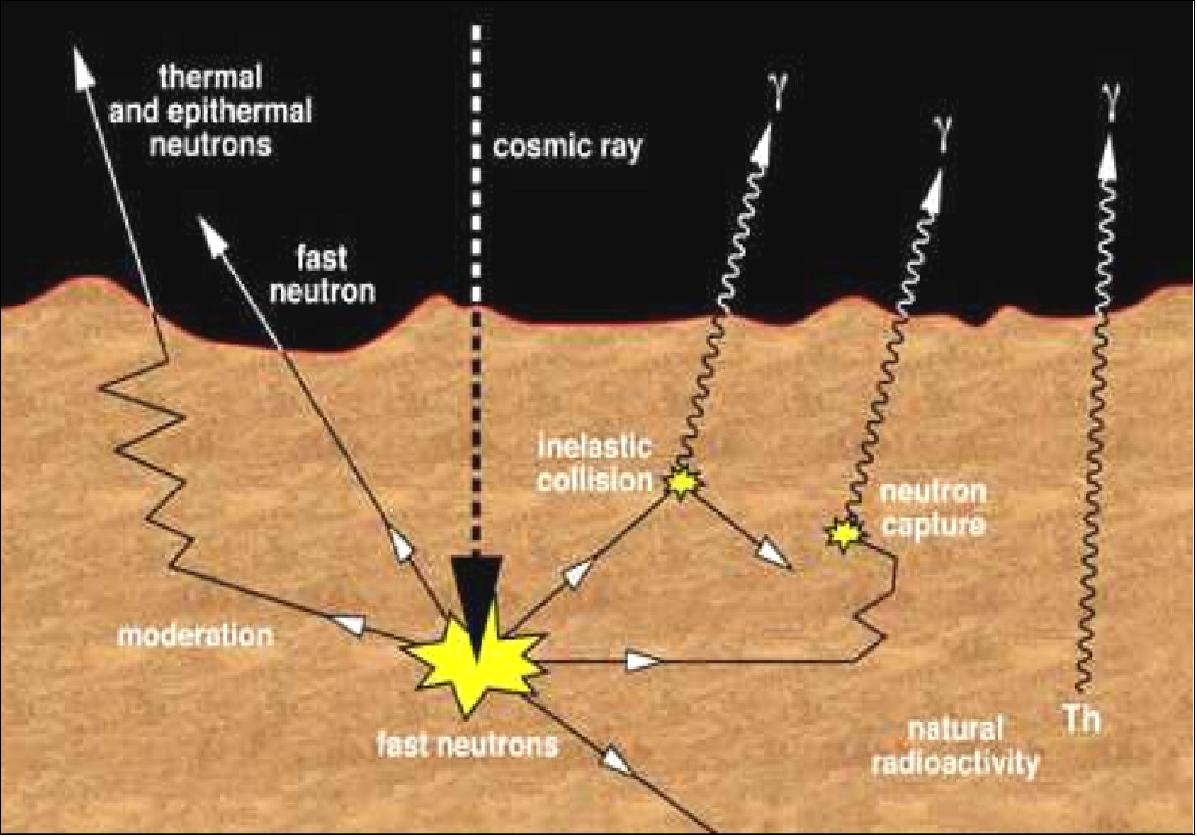
LEND's primary sensor type is the 3He counter, used for the detectors CSETN 1-4, STN 1-3, and SETN. The 3He counter produces an electrical pulse proportional to the number of ions formed. The major difference between LEND and HEND, is the collimation of neutron flux before detection. Collimating modules around the 3He counters of CSETN 1-4 effectively absorb neutrons that have large angles with respect to the normal on the moon's surface, leading to spatial resolution of 10 km full width at half maximum signal from the nominal 50 km orbit.
The LEND collimators of neutrons provide very high spatial resolution maps of neutron emission at the lunar surface. No other neutron instrument with this imaging capability has ever flown in space. LEND has a total of nine neutron sensors:
+ A - 4 3He collimated counters CSETN1-4 for epithermal neutrons >0.4 eV
+ B - 2 3He counters of Doppler filter STN1-2 for thermal neutrons
+ C - 3He counter STN-3 for thermal neutrons
+ D - 3He counter SETN for epithermal neutrons
+ E - stylbene scintillation sensor SHEN with 16 energy channels from 0.3 up to > 15 MeV (the stylbene scintillation spectrometer is being used for the detection of fast neutrons).
- Four of the 3He counters are collimated with a combination of polyethylene and 10B powder.
- Collimated detectors are also surrounded by Cd shields to filter out thermal neutrons with energies below ~0.4 eV so they are primarily sensitive to epithermal neutrons.
These detectors are also surrounded by Cd shields to filter out thermal neutrons with energies below ~0.4 eV so they are primarily sensitive to epithermal neutrons. The epithermal neutron flux is very sensitive to the presence of hydrogen in the lunar regolith and the collimated LEND 3He counters will provide detection of hydrogen near the poles to levels of 100 ppm or better with spatial resolution of 5 km (Half Width Half Maximum). If the hydrogen is associated with water, a detection limit of 100 ppm of hydrogen corresponds to ~0.1 wt% of water ice homogeneously distributed in the regolith. Over the course of the one-year LRO mission, LEND will be able to produce global maps of hydrogen content with resolutions of 5-20 km.
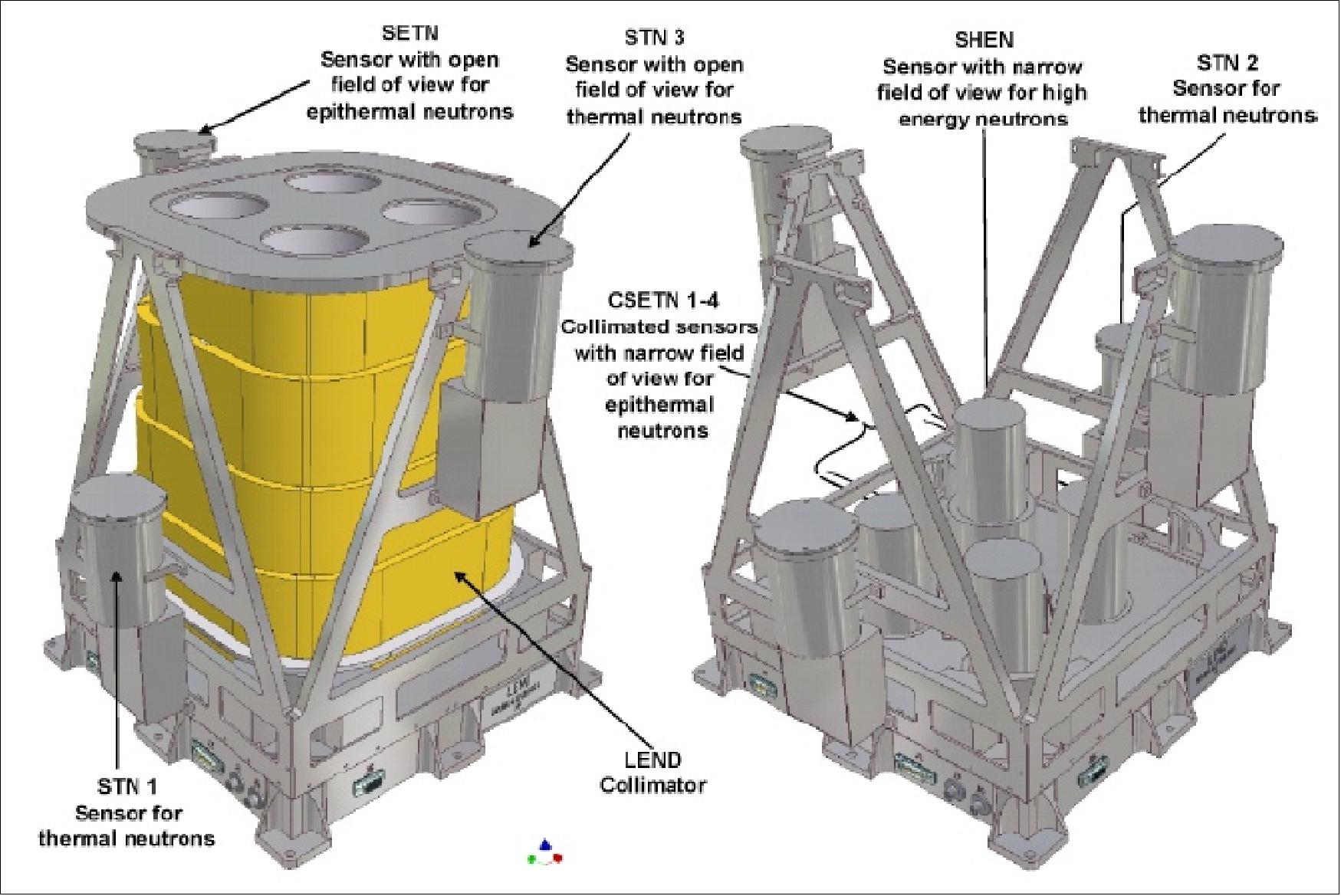
A numerical simulation of LEND performance showed that the instrument, with the optimal shaping of the collimators of sensors CSETN 1-4, may provide a detection limit (3σ) of hydrogen of about 82 ppm for a polar spot with a diameter of 10 km (FWHM), given a baseline 1 year mapping mission from a 50 km polar orbit. This detection sensitivity increases for larger spots, and decreases for locations more distant from the pole.
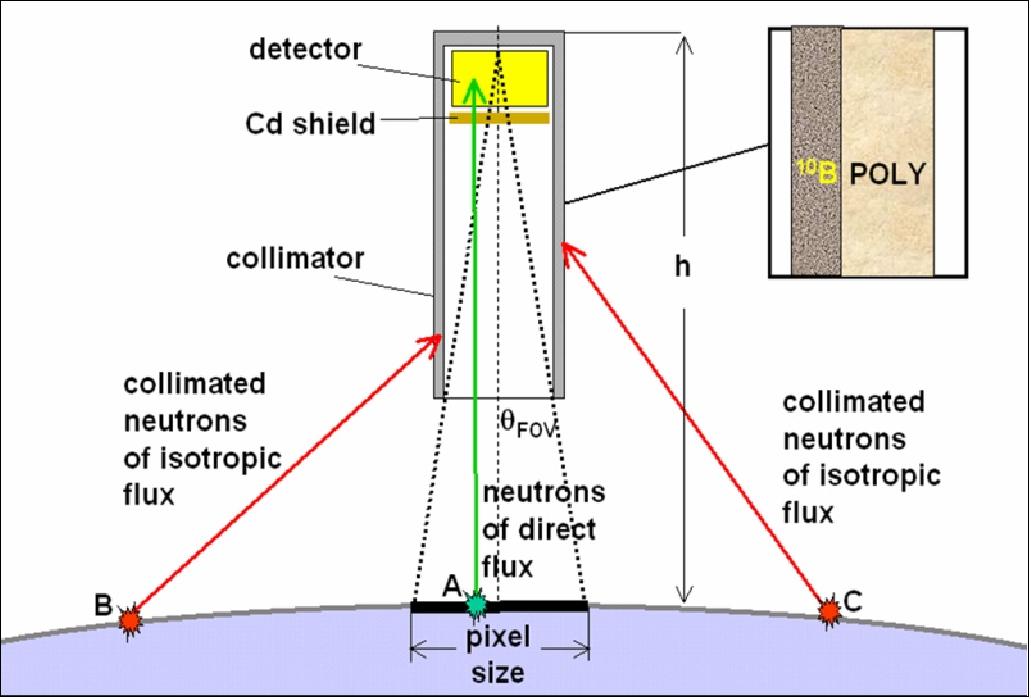
Instrument mass, power | 23.7 kg, 13 W |
Instrument size | 372 mm x 344 mm x 327 mm |
Instrument type | Collimated neutron spectrometer |
Energy range | From thermal energies up to 15 MeV |
Time resolution | Variable, > 1 s |
Spatial resolution on the lunar surface | 5 km from the 50 km orbit |
Spatial resolution inside the subsurface | 1-2 m |
Working range of temperature | From -20ºC up to +50ºC |
Telemetry data volume | 250 MB per day |
Instrument design life | 5 years |
Table 11: Overview of some performance parameters of the LEND instrument

LOLA (Lunar Orbiter Laser Altimeter):
LOLA PI: D. E. Smith, NASA/GSFC. The objectives are to provide a precise global lunar topographic model and geodetic grid that will serve as the foundation of this essential understanding. Topography at scales from local to global is necessary for landing safely and, in addition; it preserves the record of the evolution of the surface which contributes to decisions as to where to explore.
LOLA is a “geodetic tool” to derive a precise positioning of observed features with a framework (grid) for all LRO measurements: 122) 123) 124) 125)
- Topography of the moon to an accuracy ±1 m and 0.1 m precision
- Surface slopes in 2 directions to better than 0.5º on a 50 m scale
- Surface roughness to 0.3 m
- Surface reflectance of the moon at 1064 nm to ~ 5%
- Establish a global lunar “geodetic” coordinate system
- Improve knowledge of the lunar gravity field.
• LOLA is a 70 m wide swath altimeter (includes field of view of detectors) providing 5 profiles
- Along-track sampling in latitude of 25 m
- Cross-track sampling in longitude 0.04º (~25 m above latitude 85º and ~1.2 km at the equator), after 1 year of operation.
• LOLA characterizes the swath in elevation, slope and surface roughness, and brightness
• Knowledge of pixel locations determines map resolution.
Instrumentation: The LOLA instrument pulses a single laser through a DOE (Diffractive Optical Element) device to produce five beams that illuminate the lunar surface. For each beam, LOLA measures time of flight (range), pulse spreading (surface roughness), and transmit/return energy (surface reflectance). With its two-dimensional spot pattern, LOLA unambiguously determines slopes along and across the orbit track.
The LOLA instrument design is of MOLA (Mars Orbiter Laser Altimeter) and of MLA (Mercury Laser Altimeter) heritage. However, LOLA has five laser beams and five receiver channels. LOLA's laser transmitter consists of a single stage diode-pumped and Q-switched Nd:YAG laser with a 1064 nm wavelength, a 2.7 mJ pulse energy, a 6 ns pulse, a 28 Hz pulse rate, and a 100 µrad beam divergence angle. A diffractive optics element made of fused silica with an etched-in diffraction pattern is used to split the single incident laser beam into five off-pointed beams, creating the 50 m diameter 5-spot cross-pattern on the lunar surface. The reflected signal is collected by a 14 cm diameter telescope with a 5-optical-fiber array at the focal plane. Each of the five optical fibers collects the reflected signal from one of the five laser spots on the lunar surface, and delivers it to one of the five avalanche photodiodes.
The transmitted laser pulse and the five received laser pulses are time stamped with respect to the spacecraft mission elapsed time using a set of time-to-digital converters at < 0.5 ns precision. In addition, LOLA measures the transmitted and received pulse by integrating the pulse waveforms. The on-board science algorithm, running on an embedded microprocessor, autonomously adjusts the receiver detection threshold levels and detector gain to keep the range window tracking the lunar surface returns.
Laser | Pulse energy | 2.7 ± 0.3 mJ |
Receiver optics | Receiver aperture | Atel = 0.015 m2 (Ø = 0.14 m) |
Photodetector/preamplifier | Detector type | 5 Si-APD |
Timing electronics | Timing resolution | < 0.5 ns < 3 ms |
LOLA instrument mass, power | 12.6 kg, 34 W | |
Dimensions | 35 cm x 35 cm x 29 cm | |
Data rate | 28 kbit/s | |
Table 12: Parameter specification of the LOLA instrument
LOLA is a pulse detection time-off-light altimeter that incorporates a five-spot pattern that measures the precise distance to the lunar surface at 5 spots simultaneously, thus providing 5 profiles across the lunar surface. Each spot within the five-spot pattern has a diameter of 5 m; the spots are 25 m apart, and form a cross pattern (Figure 76). The 5-spot pattern enables the surface slope to be derived in the along-track and cross-track directions; the pattern is rotated approximately 26º to provide five adjacent profiles, 10 to 12 m apart over a 50 to 60 m swath, with combined measurements in the along track direction every 10 to 12 m.
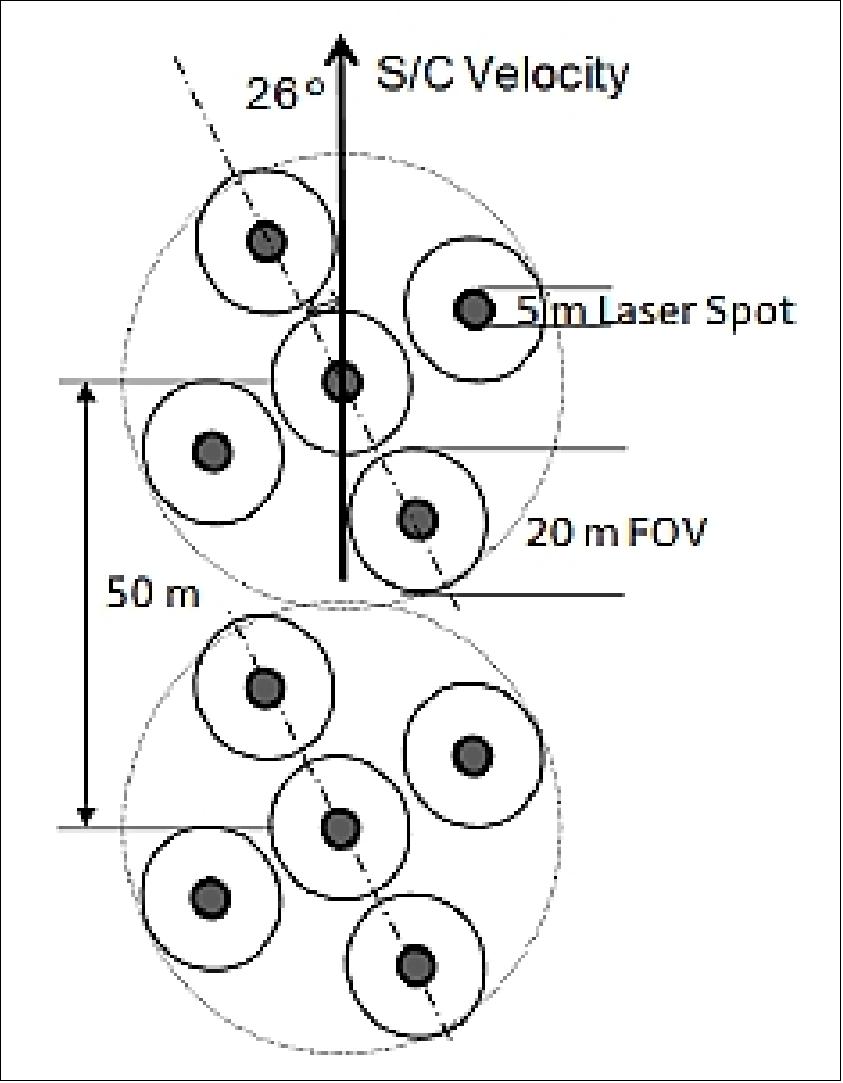
Since LOLA provides global observations, the LOLA altimetry data can be used to improve the spacecraft orbit, and the knowledge of far side lunar gravity - which is currently extremely poorly known but is required for precise landing and low-altitude navigation.
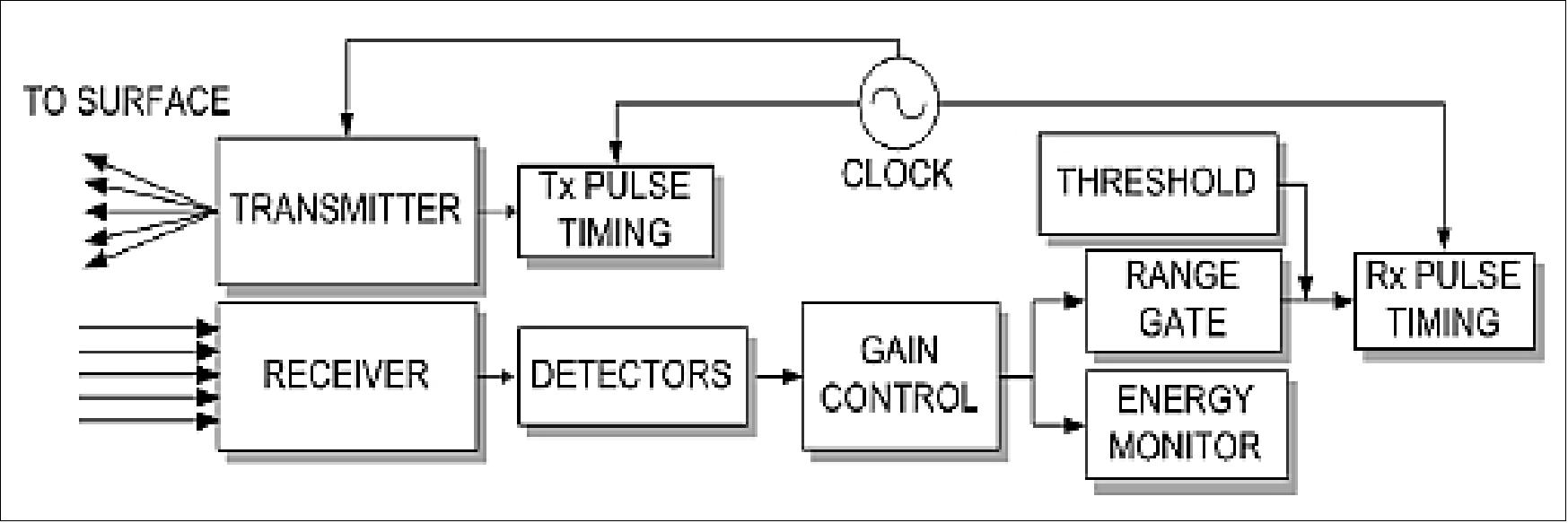
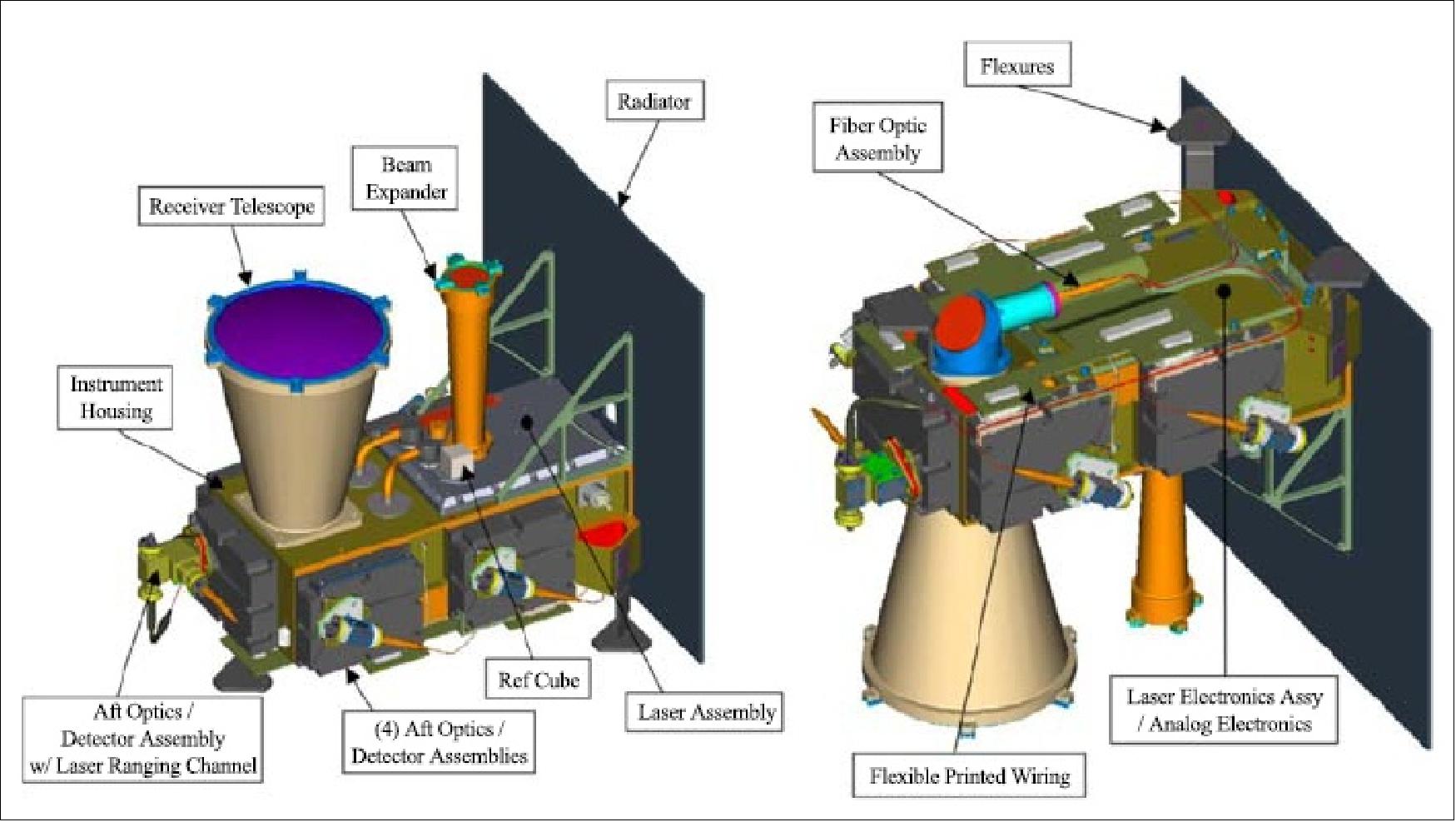
LOLA (and other LRO instruments) require accurate orbits of LRO
- high quality tracking
- improvement in the lunar gravity field
• Baseline tracking of LRO is S-band Doppler at 1 mm/s at 5 second rate from White Sands (NM), and 8 mm/s from other S-band systems enabling 24 hours/day, 7 days/week coverage (when LRO is visible)
• Simulations of the LRO mission show S-band tracking will not provide enough information to precisely determine the lunar gravity field.
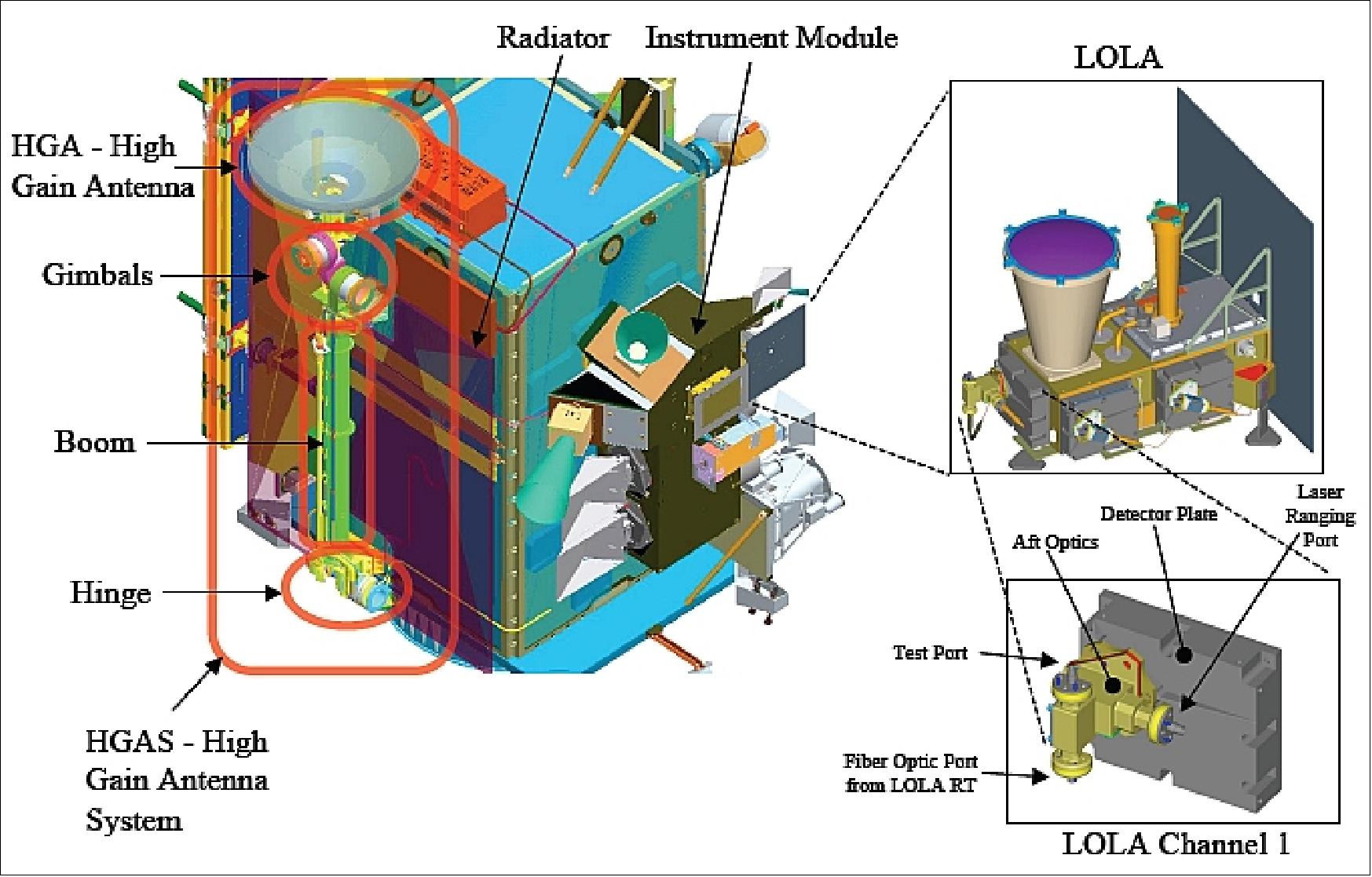
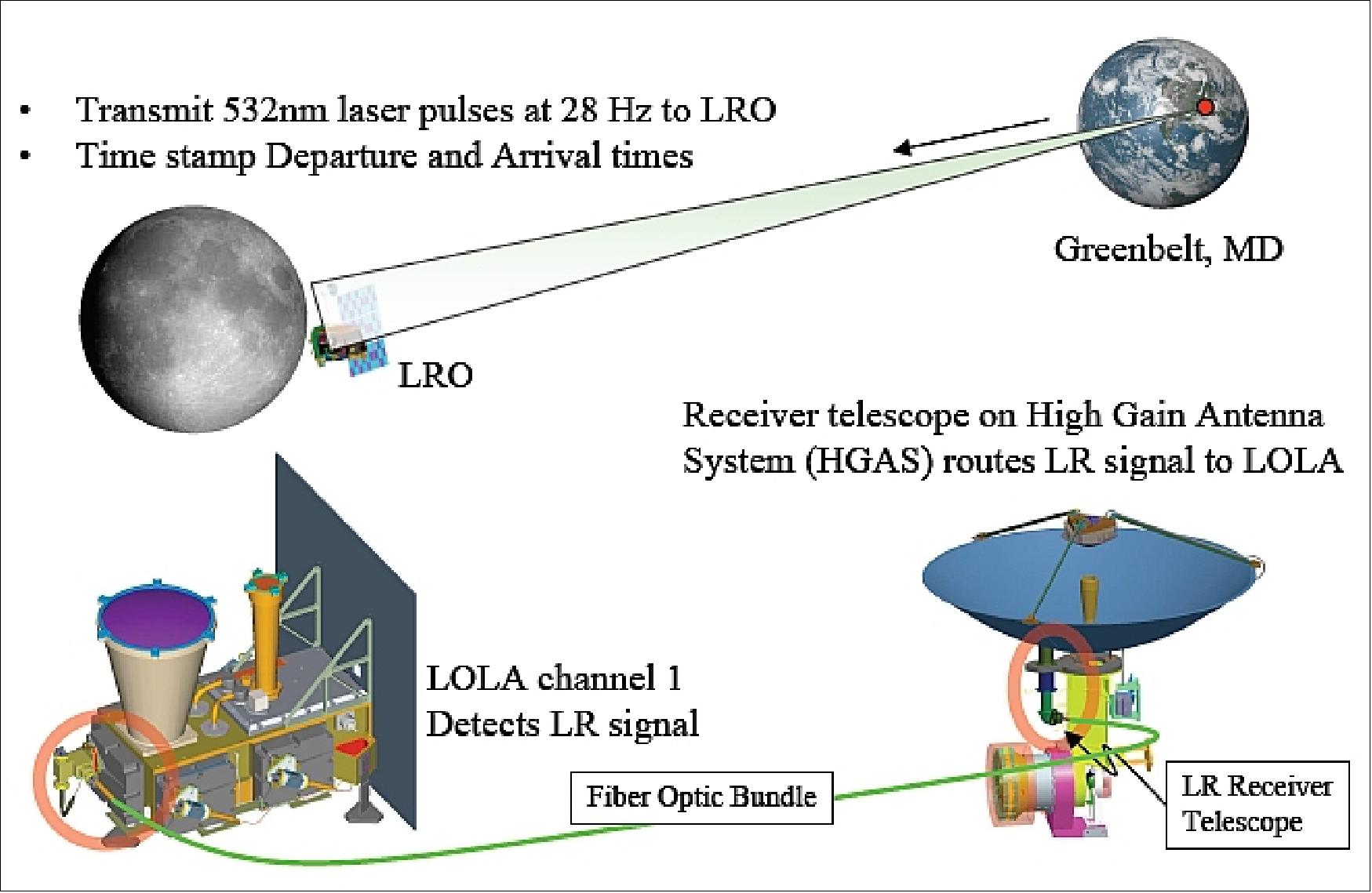
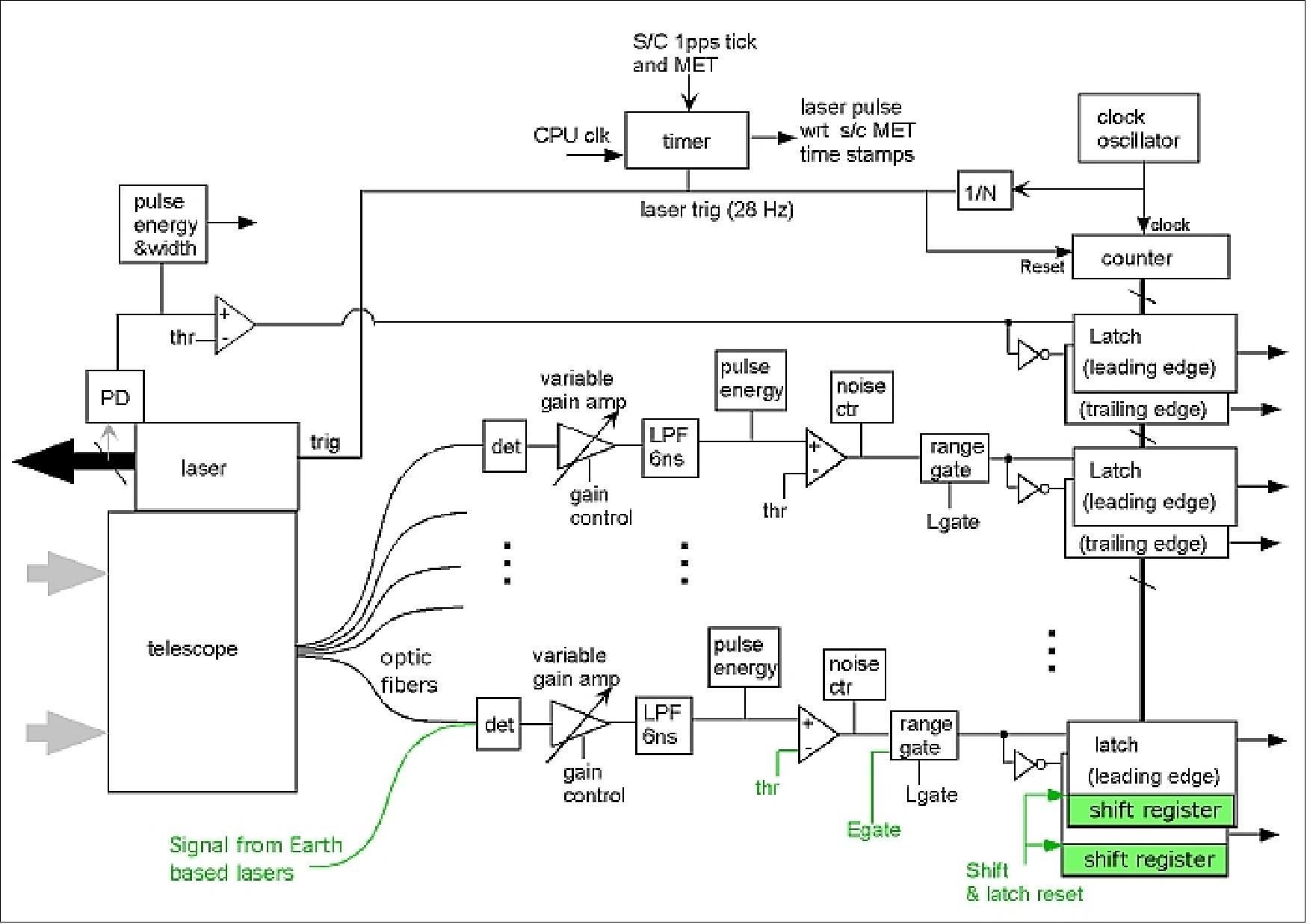
Resulting products:
6) Relative range measurements to LRO spacecraft at <10 cm precision at 1 Hz
7) Gravity model with sufficient accuracy to calculate knowledge of spacecraft position to within 50 m along-track, 50 m cross-track, and 1 m radial.
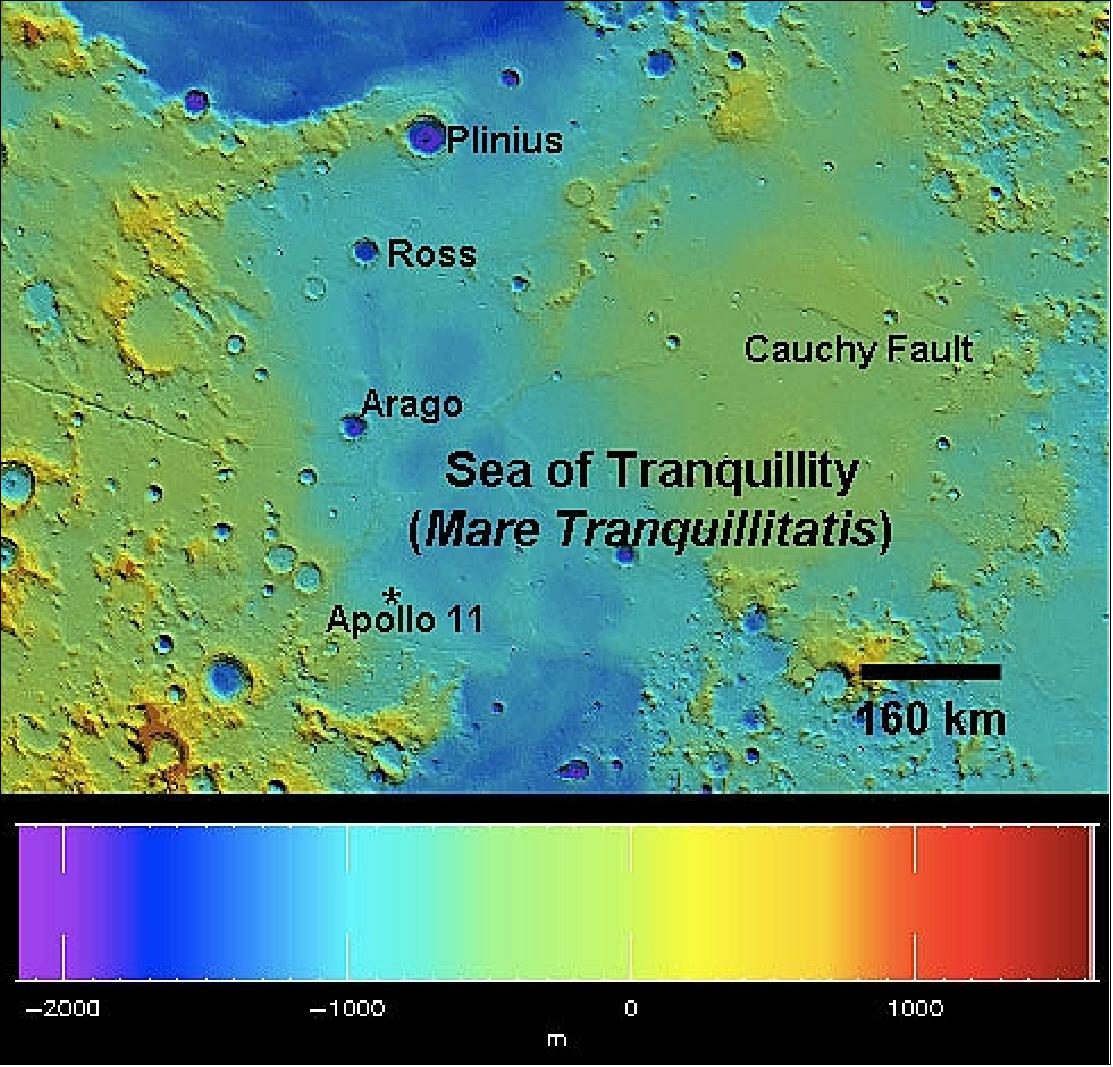
LRO-LR (Lunar Reconnaissance Orbiter-Laser Ranging)
LRO-LR is the first mission for the ILRS (International Laser Ranging Service) whose primary laser tracking method is transponder ranging. LRO-LR is a one-way (uplink only) ranging technique where the Earth laser station measures the fire times of its outgoing laser pulses and LOLA (Lunar Orbiter Laser Altimeter) measures the receive times. The range gate for the Earth received pulses in LOLA’s detector #1 is called the Earth Window. During this window the detector is gated on to receive Earth events. LOLA performs signal processing on the received Earth events and provides the signal processing results to the ground via its housekeeping packets.
These housekeeping packets are routed through the LRO Mission Operations Center (MOC) to the LOLA Science Operations Center (SOC) where the relevant data is extracted and put into a real-time website which is displayed from the Crustal Dynamics Data Information System (CDDIS) server. This real-time LRO-LR website provides feedback to all participating stations while they are ranging to LRO. Unlike two-way ranging where the laser light returns to the station and provides the feedback, this website is the only feedback that the stations have while they are ranging to LRO. The latency of the website is nominally 10 to 20 seconds, but has been observed to be as long as several minutes. 126) 127)
There are ten stations supporting laser ranging to LRO. These stations are shown in Table 13 along with their first successful ranges and their system characteristics.
Four of the participating stations are NASA MOBLAS systems. These systems were modified to permit ranging to LRO. A new Windows computer with a Guidetech timing card (model GT658) was added to each system to provide the precision needed for the fires, and the systems were all modified to fire their laser at 10 Hz.
Station | Location | Sync to LOLA | Fire rate (Hz) | Max #/s in LOLA window | Expected energy at LRO (FJ/cm2) | Station | Date of first successful ranging to LRO | LR status |
NGSLR | Maryland, USA | Yes | 28 | 28 | 1 to 5 | Maser (18-Oct-2010) | 30-June-2009 | Operational |
MLRS, | Texas, USA | No | 10 | 2 to 4 | 1 to 10 | Cesium | 02-July-2009 | Operational |
MOBLAS-7, Greenbelt | Maryland, USA | No | 10 | 2 to 4 | 1 to 3 | Maser (18-Oct-2010) | 02-July-2009 | Operational |
Herstmonceux | Great Britain | Yes | 14 | 14 | 1 to 3 | Maser (13 May- 2010) | 13-July-2009 | Operational |
Zimmerwald | Switzerland | Yes | 14 | 14 | 1 to 3 | Oversized crystal oscillator | 20-July-2009 | Operational |
Wettzell | Germany | No | 7 | 7 | 1 to 10 | Cesium | 30-Oct-2009 | Operational |
MOBLAS-6, Hartebeesthoek | South Africa | No | 10 | 2 to 4 | 1 to 3 | Maser | 05-Dec-2009 | Operational |
MOBLAS-5, | Australia | No | 10 | 2 to 4 | 1 to 3 | Maser (14-May-2010) | 25-Jan-2010 | Operational |
MOBLAS-4, Monument Peak | California, USA | No | 10 | 2 to 4 | 1 to 3 | GPS steered Rubidium | 03-Feb-2010 | Operational |
Grasse/MEO | France | No | 10 | 2 to 4 | 1 to 10 | Cesium | 18-May-2010 | Operational |
Table 13: Participating ILRS stations and their characteristics
Some of the participating ground stations control their laser fires to ensure the pulses arrive when the LOLA Earth Window is open. These systems are referred to as synchronous ranging stations. NGSLR, Herstmonceux and Zimmerwald are all synchronous stations. All other systems are asynchronous. The MOBLAS systems and Grasse all fire at 10 Hz. MLRS fires at approximately 10 Hz. Systems that fire at 10 Hz get two pulses per second into the LOLA Earth Window most of the time, and occasionally they will get four pulses per second into the Window. Wettzell fires at 7 Hz and they tune their fire frequency to match the range-rate.

LR results: As of May 2011, there were over 1000 hours of Laser Ranging data collected from all of the stations. NGSLR has over 45% of the global data collected since launch, with Yarragadee at 18%, Monument Peak at 15%, and MLRS at 13%. The global data rate appears to be increasing as shown in the plot of Figure 84.
In the early months after launch only a single station was scheduled to range to LRO at any time. This was to give the stations some experience in using the real-time LRO-LR website for feedback. Simultaneous ranging to LRO by two or more stations allows comparison of station ranging and biases. Three-way simultaneous ranging can potentially provide a geometric solution of the spacecraft location. Simultaneous ranging opportunities are now scheduled for all NGSLR, MLRS, MOBLAS-7 (Greenbelt), and MOBLAS-4 (Monument Peak) passes. In addition Grasse and Zimmerwald are also always scheduled for simultaneous ranging opportunities. More stations will be simultaneously scheduled in the near future.
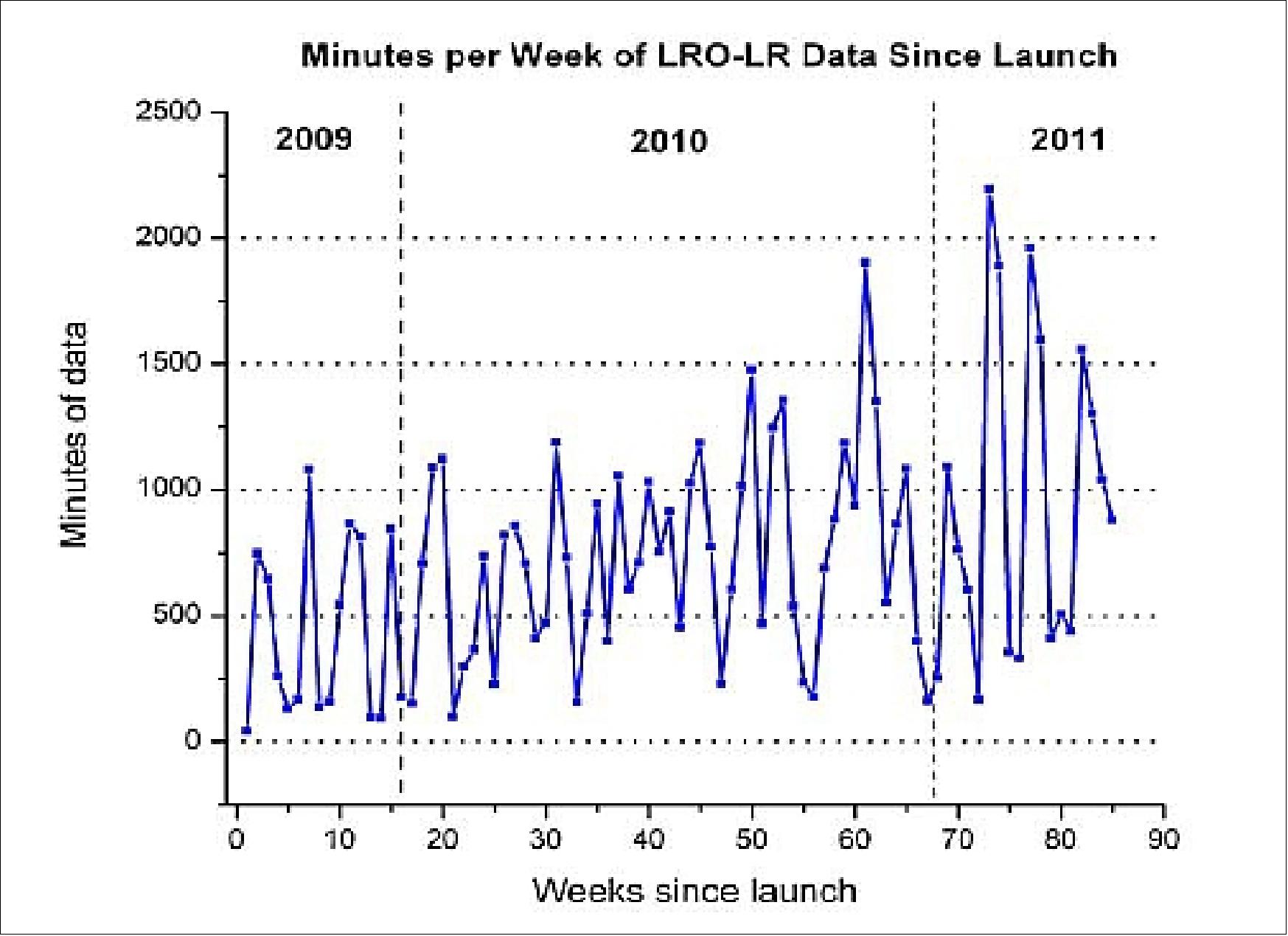
With LRO-LR entering year 3 of successful operations, one-way (uplink only) laser transponders have now been proven to work operationally. Thanks to the support of the ILRS and the participating stations, over 1000 hours of LR data has been collected and used to determine spacecraft time to UTC, and will be used to provide more precise orbits. In addition time transfer between ground stations using LRO will be attempted later in 2011, initially between Wettzell and NGSLR.
In 2013, orbit determination for LRO is accomplished by utilizing Doppler and altimetric crossover data with an uncertainty in spacecraft positioning of only ~12 m. By incorporating the high-precision LR measurements into this solution, the positioning accuracy is expected to improve, enabling more accurate orbital mapping products. To facilitate the incorporation of the LR data into the orbit solutions, the project is now focusing on the precise referencing of MET (Mission Elapsed Time) to TDB (Barycentric Dynamical Time) times. This shall be achieved by developing an improved clock model that includes effects of relativity as well as other effects. The project expects that the clock calibration and referencing (MET to TDB) is more accurate than the standard conversions provided by the SCLK (Spacecraft Clock Kernel). The data may enable improvements in orbit determination and gravity field modeling. While excellent gravity field data are available from the GRAIL mission, it will be interesting to analyze the benefits of the LR data. The accurate GRAIL fields provide a basis for quantitatively evaluating improvements in –pre-GRAIL models. 128)
LROC (Lunar Reconnaissance Orbiter Camera)
LROC PI: M. Robinson, of ASU (Arizona State University), Tempe, AZ, USA. The LROC Science Team includes participants from Brown University, Washington University, and the University of Arizona. The objectives of LROC are to address two requirements: 1) landing site certification and 2) polar illumination. Specific mission goals are: 129) 130) 131) 132)
- Landing site identification and certification, with unambiguous identification of meter-scale hazards
- Unambiguous mapping of permanent shadows and sunlit regions
- Meter-scale mapping of polar regions with continuous illumination
- Overlapping observations to enable derivation of meter-scale topography
- Global multispectral imaging to map ilmenite and other minerals
- Determine current impact hazard by reimaging 1-2 m/pixel Apollo images
- Global morphology base map
- Characterize regolith properties.
Instrumentation: LROC is a modified version of CTX (ConTeXt Camera) and MARCI (MARs Color Imager) flown on the MRO (Mars Reconnaissance Orbiter) mission. The LROC is comprised of two NACs (Narrow-Angle Cameras), a WAC (Wide-Angle Camera), and the SCS (Sequence and Compressor System). The total mass of LROC is 16 kg. The instrument is being developed by MSSS (Malin Space Science Systems) in San Diego, CA.
• Each NAC uses a Ritchey-Chretien telescope with a focal length of 700 mm that images onto a 5000 pixel CCD line array, providing a cross-track FOV of 2.86º. The NAC readout noise is better than 100 e-, and the data are sampled at 12 bit, then compressed to 8 bit, square root encoded values prior to downlink. The NAC internal buffer holds 256 MB of uncompressed data, enough for a full swath image 25 km long or a 2 x 2 binned image 100 km long.
• The WAC has two short focal length lenses imaging onto the same 1000 x 1000 pixel, electronically shuttered CCD area array, one imaging in the visible/near infrared (EFL = 6.0 mm), and the other in the UV range (EFL = 4.5 mm). The optical systems have a cross-track FOV of 90º and 60º respectively. From the nominal 50 km orbit, the WAC will provide a nadir, ground sample distance of 100 m/pixel in the visible, and a swath width of ~100 km. The seven band color capability of the WAC is provided by a color filter array mounted directly over the detector, providing different sections of the CCD with different filters acquiring data in the seven channels in a “pushframe” mode. Continuous coverage in any one color is provided by repeated imaging at a rate such that each of the narrow framelets of each color band overlap.
Spatial resolution, IFOV (Instantaneous Field of View) | 0.5 m, 10 mrad |
FOV | 2.86º (0.05 radian) per NAC |
Maximum image size | 2.5 km x 25 km |
Optics | f/3.59 Cassegrain (Ritchey-Chretien) |
Effective focal length | 700 mm |
Primary mirror diameter | 195 mm |
MTF (Modulation Transfer Function) at Nyquist frequency | > 0.20 |
Structure + baffle | graphite-cyanide composite |
Detector | Kodak KLI-5001G |
Pixel format | 1 x 5,000 |
Noise | 100 e- |
A/D converter | Honeywell ADC9225 |
FPGA (Floating Point Gate Array) | Actel RT54SX32-S |
Volume, power | 70 cm x 26 cm diameter, 10 W (peak), 6 W (average) |
Spectral range | 400-750 nm |
Instrument mass | 5.4 kg (each device) |
Table 14: Specification of the NAC devices
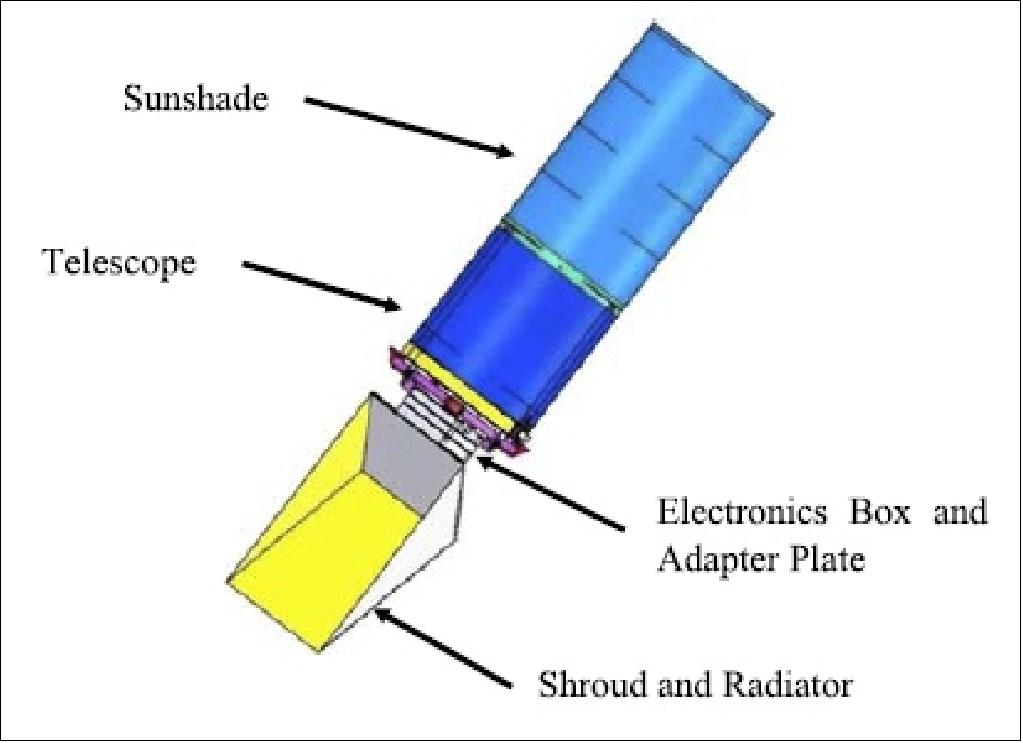

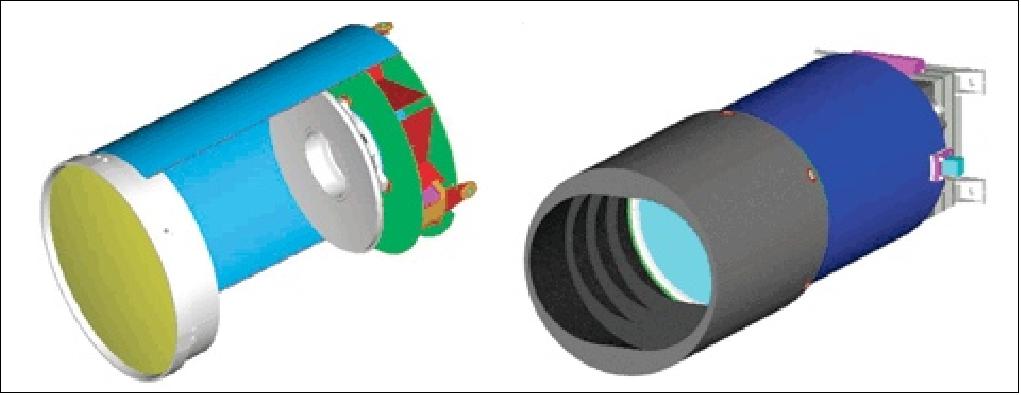
Imager type | Pushbroom multispectral camera |
Image format | 1024 x 16 pixels monochrome |
Spectral bands (center frequency) | No 1: 315 nm |
Spatial resolution | 1.5 mrad, 75 m/pixel at nadir (visible) |
Swath width (from a 50 km lunar orbit) | 105 km (visible monochrome) |
FOV (Field of View) | 90º (visible) |
Optics | f/5.1 (visible) |
Effective focal length | 6.0 mm (visible), 4.6 mm (UV) |
Entrance pupil diameter | 1.19 mm (visible), 0.85 mm (UV) |
System MTF (Nyquist) | > 0.2 |
Detector | Kodak KLI-1001 |
Pixel format | 1024 x 1024 |
Noise | 50 e- |
Instrument volume, power | 14.5 cm x 9.2 cm x 7.6 cm, 4 W |
Instrument mass | 0.6 kg |
Table 15: Parameters of the WAC instrument
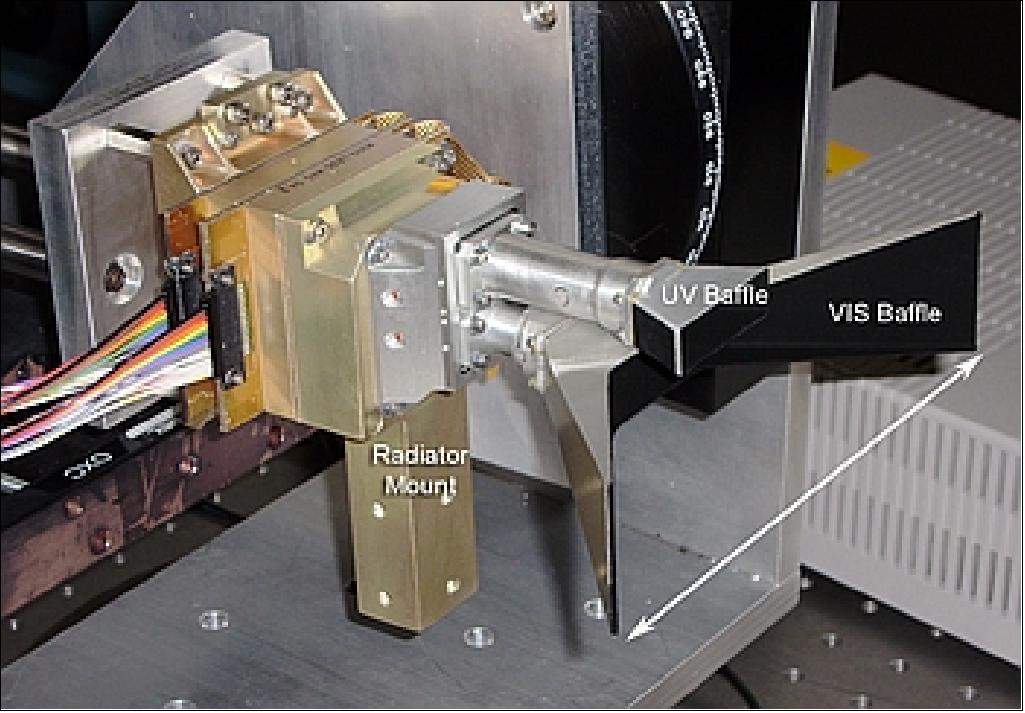
The NACs and WAC interface with the SCS (Sequence and Compressor System), the third element of the LROC. The SCS commands individual image acquisition by the NACs and WAC from a stored sequence, and applies lossless compression to the NAC and WAC data as they are read out and passed to the spacecraft data system. The SCS provides a single command and data interface between the LROC and the LRO spacecraft data system.
FPGA | Xilinx XQR2V3000 |
Interfaces | SpaceWire, LVDS |
Power supply | Interpoint SMSA2805S |
Power consumption | ~3 W (idle), ~4 W (peak) |
Volume | 11.4 cm x 16.5 cm x 3.8 cm |
Instrument mass | 0.6 kg |
Table 16: Parameters of SCS (Sequence and Compressor System)
Mini-RF (Miniature Radio Frequency) instrument - a technology demonstration
Mini-RF was developed by an JHU/APL (Johns Hopkins University/Applied Physics Laboratory) and Navy team (PI: Benjamin J. Bussey). Mini-RF represents a significant step forward in spaceborne RF technology and architecture. It combines SAR (Synthetic Aperture Radar) at two wavelengths (S-band and X-band) and two resolutions (150 m and 30 m) with interferometric and communications functionality in one lightweight (14 kg) package. 133) 134)
Previous radar observations (Earth-based, and one bistatic data set from Clementine) of the permanently shadowed regions of the lunar poles seem to indicate areas of high CPR (Circular Polarization Ratio) consistent with volume scattering from volatile deposits (e.g. water ice) buried at shallow (0.1–1 m) depth, but only at unfavorable viewing geometries, and with inconclusive results. The LRO Mini-RF utilizes new wideband hybrid polarization architecture to measure the Stokes parameters of the reflected signal. These data will help to differentiate “true” volumetric ice reflections from “false” returns due to angular surface regolith. Additional lunar science investigations (e.g. pyroclastic deposit characterization) will also be attempted during the LRO extended mission.
The objectives of the Mini-RF instrument are:
1) Flight verification of an advanced lightweight RF technology for future NASA and DoD (Department of Defense) communications applications
2) Demonstration of a hybrid-polarity SAR (Synthetic Aperture Radar) architecture
3) Obtaining measurements of the lunar surface as a function of radar band (S and X) and resolution (150 m, 30 m) which could identify water ice deposits in the permanently shadowed polar regions
4) Production of topographic data using interferometry (S-band) and SAR stereo techniques
5) Mapping of areas of interest identified by the Chandrayaan-1 forerunner Mini-SAR experiment and other lunar instruments. Coordinated, bistatic imaging in S-band, to be compatible with the Chandrayaan-1 and the LRO spacecraft, can unambiguously resolve ice deposits on the moon.
Background: The Mini-RF payload will address key science questions during the LRO primary and extended missions. These include exploring the permanently shadowed polar regions and probing the lunar regolith in other areas of scientific interest (e.g. pyroclastic deposits). The nature and distribution of the permanently shadowed polar terrain of the moon has been the subject of considerable controversy.
The Mini-RF hardware is based on DoD communications technology and methodology. Precursor Mini-RF technology was flight-tested by NRL (Naval Research Laboratory) in the low Earth orbit on the USAF MightySat-2 and XSS-10 missions as a Space Ground Link System (SGLS).
In 2004, the DoD and NASA initiated the Mini-RF program to develop and flight-test advanced lightweight radar and communication systems and NASA elected to apply the technology to lunar exploration by building two payloads. The first, “Forerunner” Mini-SAR (Miniature SAR) instrument, was developed and integrated into the ISRO (Indian Space Research Organization) Chandrayaan-1 mission to the moon (launch Oct. 22, 2008) as a NASA guest payload and the second, on the LRO spacecraft as a technology demonstration. The Mini-SAR assembly had to operate in the lunar thermal and radiation environment, yet was simpler in design and operation, providing significant experience and reduction of risk for the more advanced LRO Mini-RF system.
In May 2006, ISRO and NASA signed a MOU in Bangalore on the inclusion of two US instruments, namely Mini-SAR and M3 (Moon Mineralogy Mapper), to be flown on the Chandrayaan-1 mission.
The LRO Mini-RF affords NASA and the DoD an opportunity to flight-qualify lightweight technology for a range of applications, including deep space communications. The flexibility, reconfigurability, and capability of Mini-RF will be demonstrated by a communications and radar mode utilizing the same hardware. The constraints of a lunar mission (range, limited duty cycle over the poles) and the low mass of advanced lightweight RF technology allows a technology demonstration which met the payload constraints of both the Chandrayaan-1 and LRO spacecraft, and provided an opportunity to collect unique and valuable lunar science data. The new technologies being qualified on LRO Mini-RF include: MPM (Microwave Power Module) based multi-frequency transmitter, wideband dual-frequency panel antenna, all digital receiver and waveform synthesizer incorporating FPGA (Field Programmable Gate Array) and analog-to-digital conversion at 1 GHz sampling.
The Mini-RF parts qualification program, which included commercial technology, allowed innovative components to gain space qualification. A comparison of the Mini-RF radar and communications performance with existing and previously flown technology, illustrating mass and performance improvements, is shown in Table 17.
Mission/ | SAR instrument mass | DC power input | RF power | Frequency band | Spacecraft | Orbital altitude | Launch date |
SEASAT, SAR |
|
| 1 kW | L-band | 2300 kg | 800 km | June 27, 1978 |
Magellan (Venus Radar Mapper) | 154 kg | 1 kW | 325 W | S-band | 1035 kg | 249 km x 8543 km | May 4, 1989 |
SIR-C | 11,000 kg | 3-9 kW |
| L, C, X | Shuttle | 225 km | Apr. 9, 1994 |
Chandrayaan-1 | 8.1 kg | < 100 W | 15 W | S-band | 525 kg | 100 km | Oct. 22, 2008 |
LRO | 13.9 kg | ~150 W | 25 W | S-band, | < 1000 kg | 50 km | June 18, 2009 |
Table 17: Performance comparison of various SAR missions
Mini-RF instrument investigation and description:
The Mini-RF instrument features a new hybrid-polarity architecture, a dual-polarized system with a linearly-polarized antenna - leading to a simpler yet more capable radar. The essential feature of the hybrid-polarity architecture is: transmit circular polarization (by driving the orthogonal linear feeds simultaneously by two identical waveforms, 90º out of phase), and receive H and V linear polarizations, coherently (measurement of the 2 x 2 covariance matrix of the backscattered field). Once calibrated, the H and V single-look complex amplitude data are sufficient to form all four Stokes parameters, from which the circular-polarization ratio may be found, along with several other quantitative characterizations in the image domain. 135) 136) 137) 138) 139)
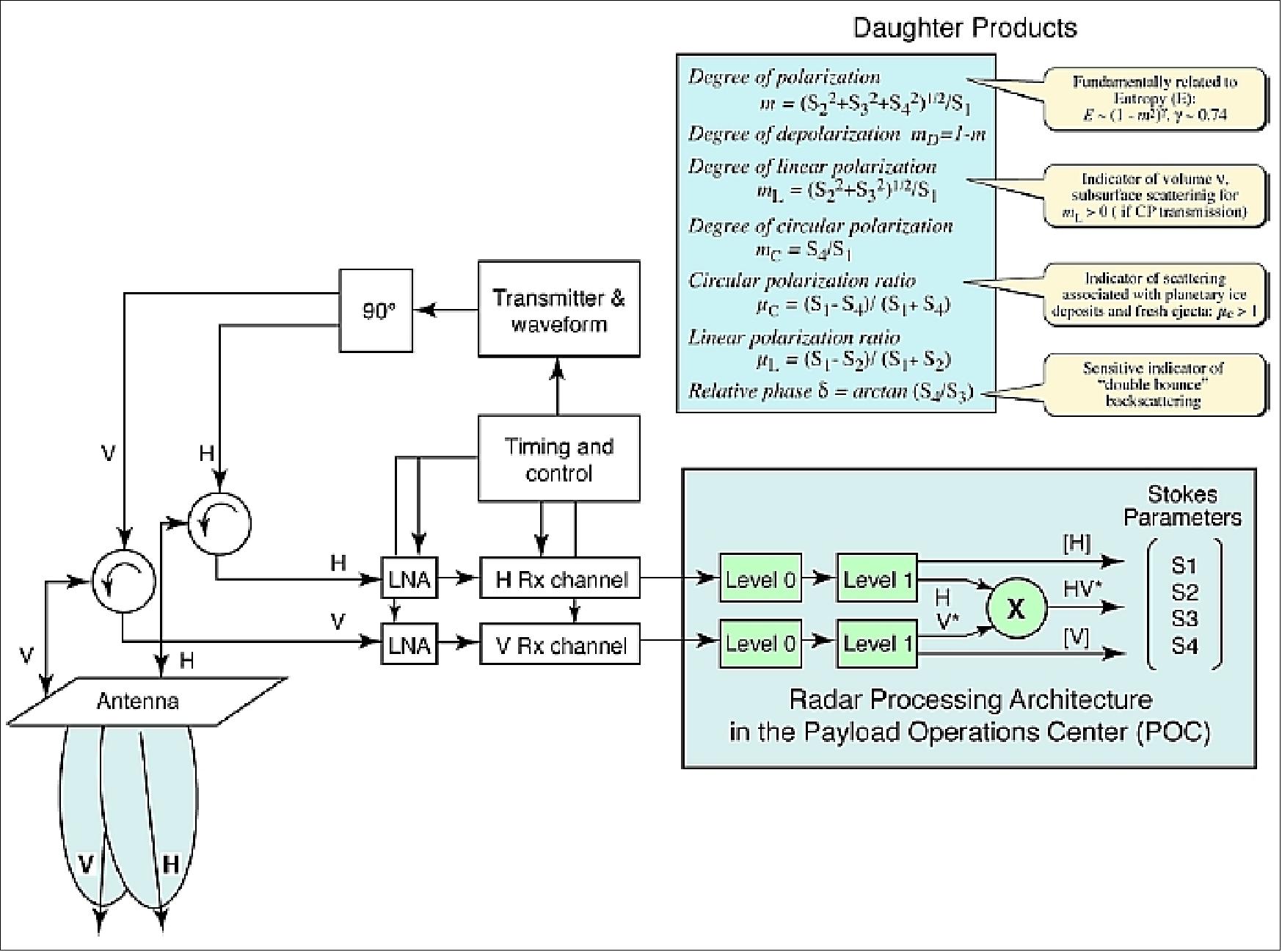
As the Mini-RF system probes the lunar regolith at two frequencies (S-band and X-band) it will provide additional information on the physical properties of the upper 1-2 m of the lunar surface. Under the proposed observational constraints, Mini-RF can identify areas of high CPR (~1), which could be caused by ice deposits. Areas that do show high CPR can be analyzed with greater sensitivity through their backscattering features. It is hypothesized that “ice” and “regolith” will have differentiable characteristics as seen through their respective Stokes parameters at two wavelengths. When supported by Chandrayaan-1 and other LRO data (e.g. neutron spectroscopy, shadow and lighting, roughness and surface texture, thermal environment), the LRO Mini-RF measurements should provide more conclusive evidence as to the likelihood that ice deposits occur in permanently shadowed areas.
Parameter | Requirements | Performance |
Frequency bands | S-band (12.6 cm wavelength) and | 2380 MHz (±10 MHz) and |
Instrument mass | ≤ 16 kg | 13.9 kg total; 8.5 kg electronics; 5.4 kg antenna |
Radiation tolerance | 20 kRad, SEU/SEL 75 MeV | Selective wavers |
Thermal environment | -20ºC, –30ºC |
|
DC current | < 4.8 A transmitter; < 4.7 A remainder | 5.2 A transmitter; 1.7 A at 27 V |
RF transmitter power |
| 42.6 dBm S-band; 41.1 dBm X-band |
Operating time (duty cycle) | 3 min on, 50 min off; | 10 min on, 20 min off, |
Transmit polarization | Circular polarization | Circular polarization |
Polarization isolation | 1.7 dB axial ratio | ≤ 2.0 dB axial ratio, (to be verified in flight) |
Receive polarization | H and V | ≥ 40 dB isolation |
Channel to channel power | ±1 dB “knowledge” | ±0.2 dB S-band |
Calibration | -0.1 dB X-band | ±0.2 dB X-band |
S-band baseline resolution | 150 m azimuth x range | 150 m x 150 m |
S-band Noise Equivalent | -30 dB at 50 km altitude | -33.6 dB |
Radar cross section |
|
|
Number of looks | 16 | 16 |
Range of swaths | 6 km in S-band, 4 km in X-band | 6 km in S-band, 4 km in X-band |
S-band zoom capability | 15 m x 30 m | 15 m x 30 m |
X-band baseline resolution | 150 m | 150 m x 150 m |
X-band Noise Equivalent | -24 dB at 50 km altitude | -26.3 dB |
Radar cross section |
|
|
Number of looks | 16 | 16 |
PRF (Pulse repetition Frequency) | -18 dB | -18 dB |
X-band zoom capability | 30 m | 15 x 30 m |
Radiometric stability | ±0.5 dB | ±0.5 dB |
Communications demonstration | S-band | 2380 MHz |
Mode | Half duplex | Half duplex |
Transmit | Modulated signal | BPSK, Manchester, Variable data rate and modulation index |
Received signal | Digitize signal | Continuous 500 kbit/s |
Table 18: Mini-RF instrument requirements and performance (Ref. 133)
Technology demonstrations: The Mini-RF observations are made possible within the mass and power constraints imposed by LRO via application of a number of technologies. Two key technologies are a wideband MPM (Microwave Power Module) based transmitter and a lightweight broadband antenna and polarization design. The Mini-RF also has an S-band-only interferometric mode with 3.5 km wide strips with ±15 m mapping accuracy to measure lunar topography. This will be the first demonstration of interferometric SAR techniques in a planetary mission. The Mini-RF antenna architecture is shown in Figure 89. The H and V right circular polarization components are transmitted coherently, which are then reconstructed as Stokes’ parameters during the data processing step.
Both the communications and the radar astronomical objectives impose a requirement for circular polarization on the transmitted field. Conventional radar that would measure CPR (Circular Polarization Ratio) then would have to be dual-circularly polarized on receiver. The hybrid-polarity approach provides weight savings by eliminating circulator elements in the receiver paths, which reduces mass, increases RF efficiency, and minimizes cross-talk and other self-noise aspects of the received data. The H and V signals are passed directly to the ground-based processor. It is well known that the Stokes parameters comprise a full characterization of the backscattered field.
The values of the four Stokes parameters do not depend on the choice of receiver polarization, so this architecture minimizes hardware while maintaining full science value. The result provides significant advantages over the conventional “CPR-measuring” dual-circular-polarized approach, yet the radar is simpler. The use of possible Stokes parameter-based products (e.g. CPR, degree-of-depolarization, degree-of-linear-polarization, phase “double bounce”) have a number of significant advantages over traditional radar systems: less hardware is needed, resulting in fewer losses and a “cleaner,” simpler flight instrument. The signal levels are comparable (within ~2 dB) in both channels allowing relatively relaxed specifications on channel-to-channel cross-talk and more robust phase and amplitude calibration. The processor has a direct view through the entire receiver chain; including the antenna receives patterns and other radar parameters (e.g., gain and phase). These parameters are applied in processing “Levels” (Level 0, 1) which correspond to successive data processing stages, as shown in Figure 89.
The design allows selective Doppler weighting to maximize channel–channel coherence (e.g., reduce the H & V beam mismatch). As CPR is less sensitive to channel imbalance by at least a factor of 2 with respect to explicit RCP/LCP, Stokes parameter-based backscatter decomposition strategies can help distinguish “false” from “true” high CPR areas (e.g., analysis of “m-δ” feature space (Ref. 135).
Mini-RF instrument: The Mini-RF Instrument is comprised of the following elements: (1) antenna, (2) transmitter, (3) digital receiver/quadrature detector waveform synthesizer, (4) analog RF receiver, (5) Control Processor, (6) interconnection module, and (7) supporting harness, RF cabling, and structures. The functional block diagram is shown in Figure 90 while its layout is shown in Figure 91.
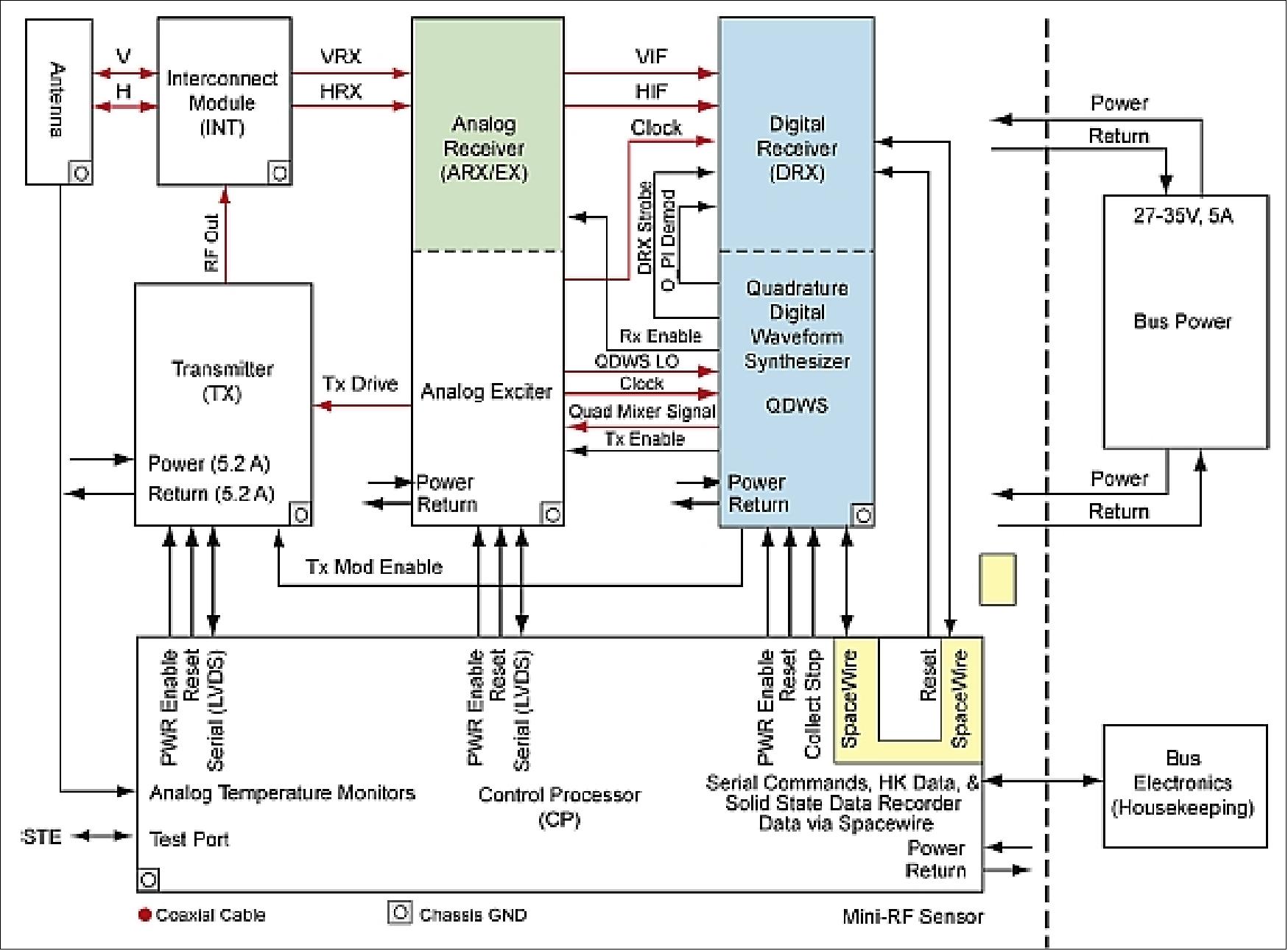
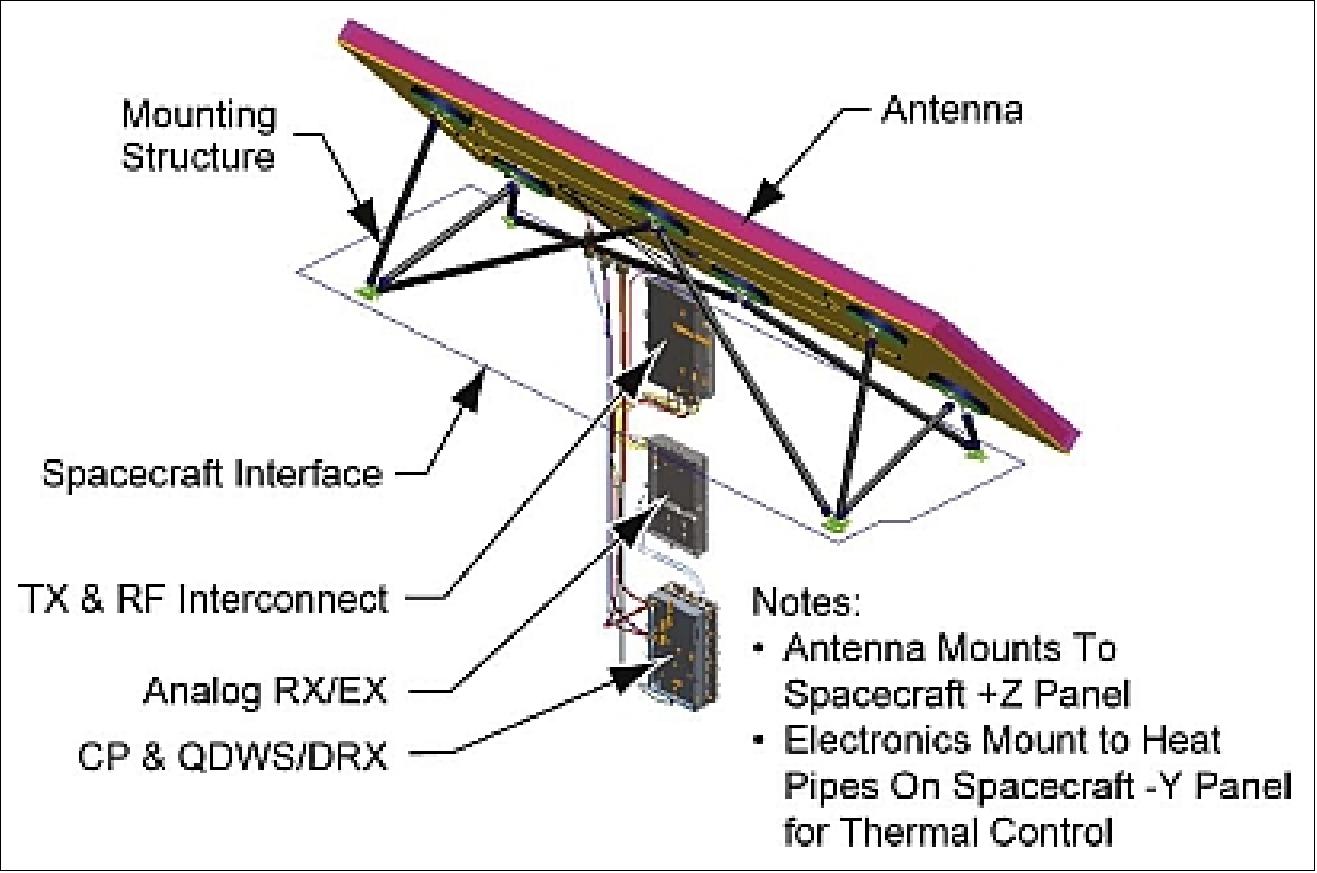
Antenna: An “egg crate” antenna (Figure 92) allows a broadband, dual-frequency design with a single antenna panel, without any deployable mechanisms (e.g. feeds) while also meeting stringent weight and volume constraints. The elements are sized to allow a 3:1 frequency range. Each element incorporates radiators and physical phasing combines their power. The thermal design, materials selection, manufacturing, and test qualification heritage of the single-frequency Chandrayaan-1 Mini-SAR antenna was applied to the dual frequency LRO Mini-RF unit. Because of this heritage, the Mini-RF antenna is robust and lightweight (4 kg) while satisfying all technical requirements.
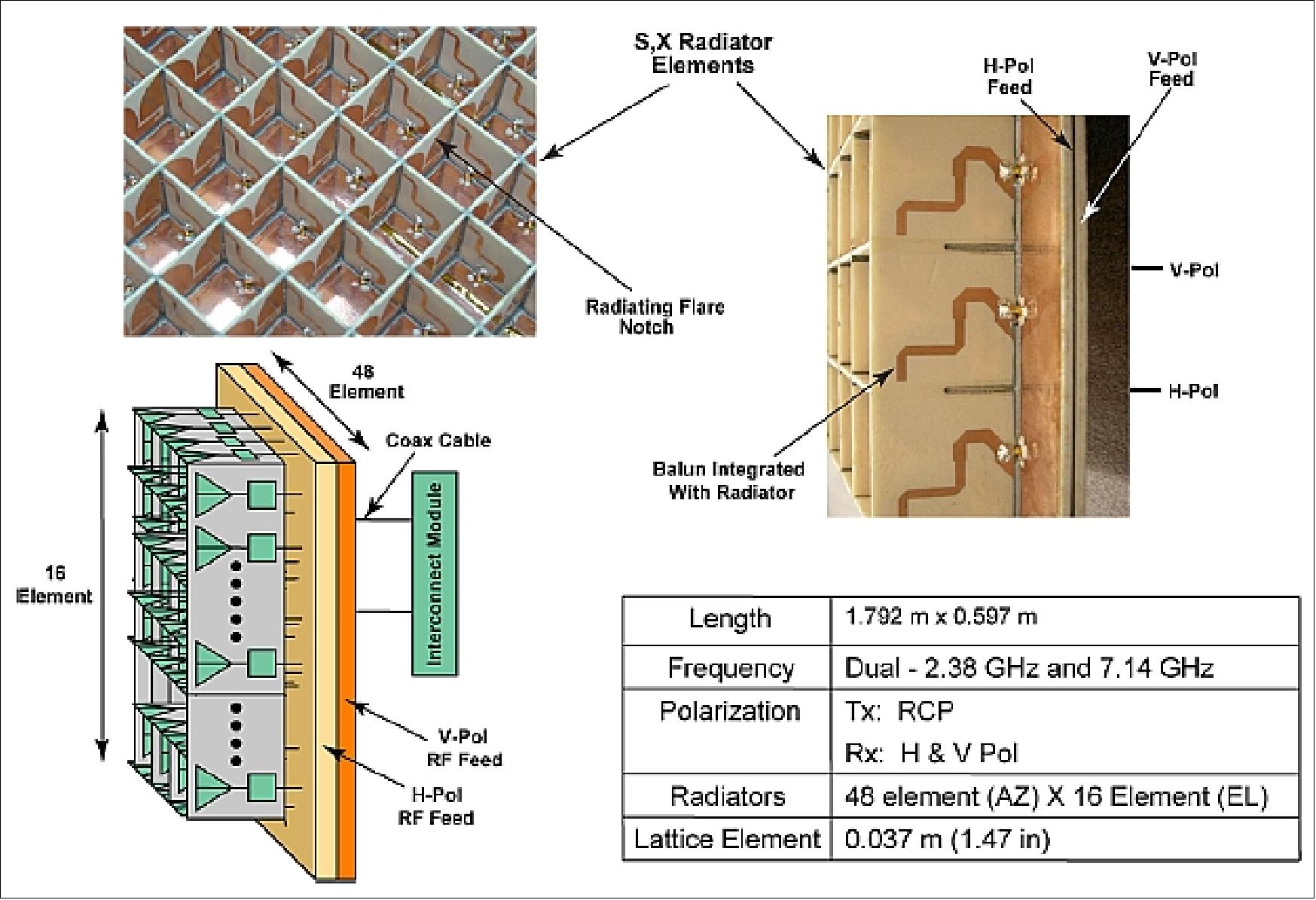
Transmitter: The LRO Mini-RF transmitter (Figures 93, 94) takes full advantage of the capabilities of the wideband antenna. The transmitter is the first implementation of the MPM (Microwave Power Module) technology on a long-duration spaceflight, which affords a significant breakthrough in available bandwidth and power efficiency with reduced mass as compared to previous TWT (Traveling Wave Tube) systems. The MPM combines a solid state RF driver/preamplifier with a traveling wave tube amplifier, a hybrid approach combining the advantages of both solid state and vacuum electronic technology. Flight-testing the MPM technology is a major goal of the Mini-RF demonstration. The MPM is enabling in giving Mini-RF its dual-band capability within the challenging mass, power, and volume constraints of the LRO spacecraft (Ref. 133).
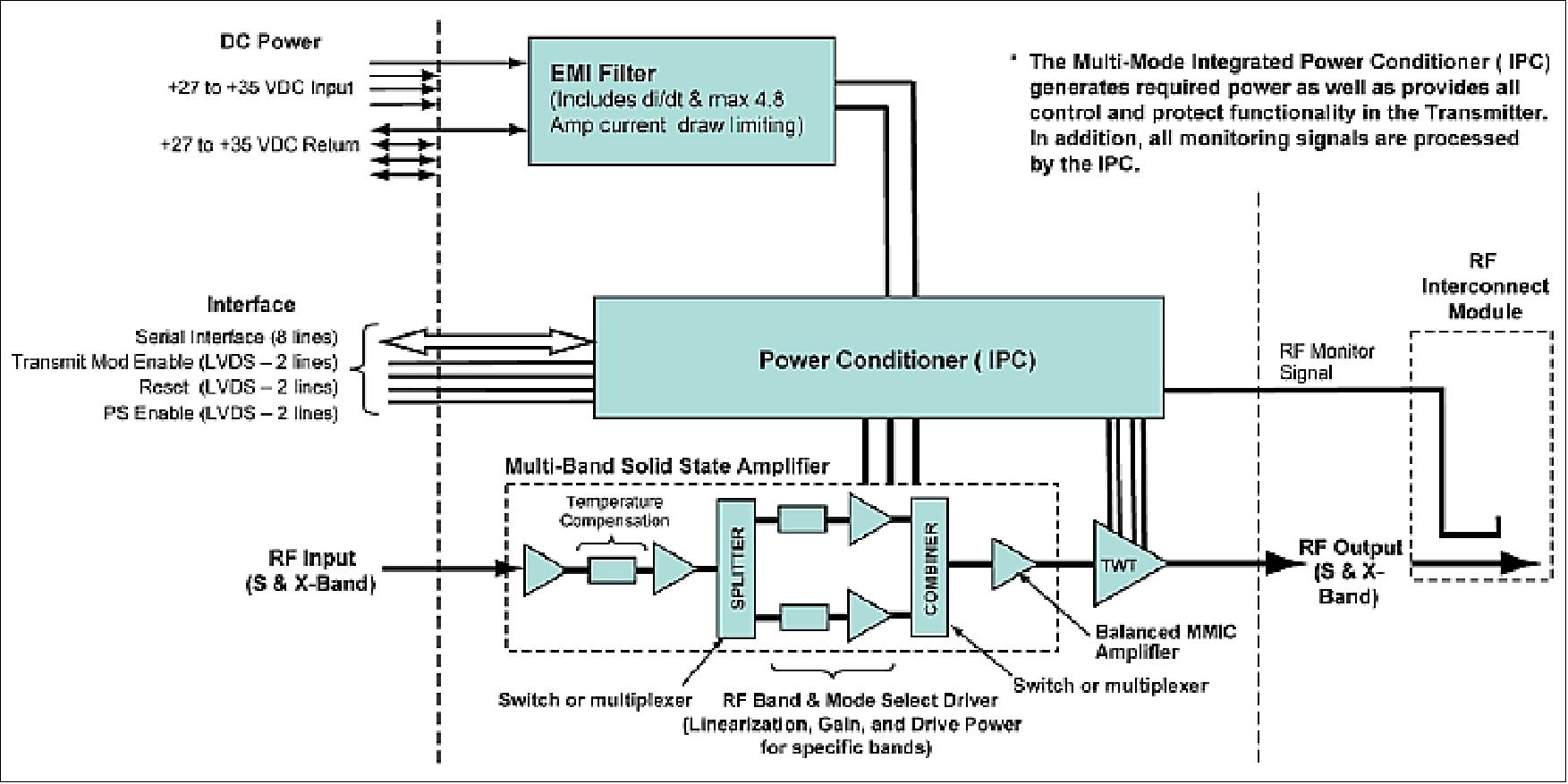
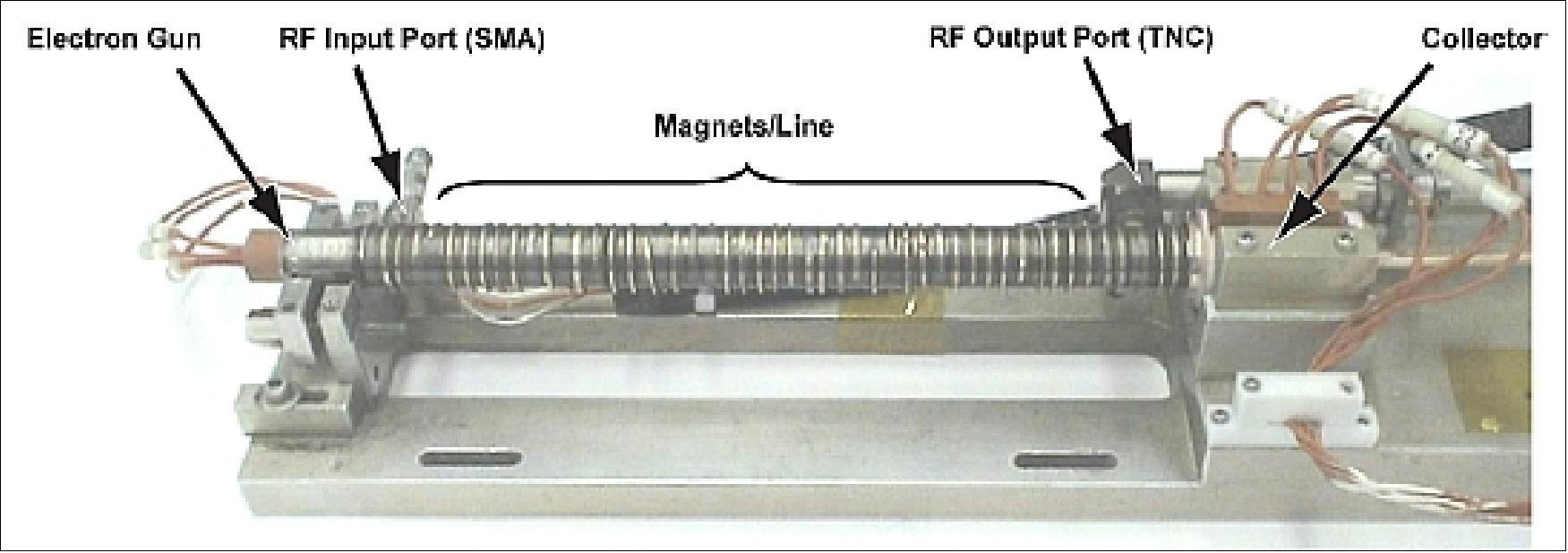
IM (Interconnect Module): The IM combines and splits the RF energy and serves as the interface between the transmitter, receiver, and antenna. Its design specifically handles issues such as multipaction using selected materials and geometry.
Mini-RF calibration: Laboratory calibration data was acquired during spacecraft integration and test. The overarching goal of these activities was to insure production of a calibrated instrument. All waveforms in the waveform table were tested on brassboard hardware while selected waveforms were tested on flight hardware. This waveform testing is inherent in the overall Mini-RF integration and test program. Additional waveform testing was conducted on the flight instrument during thermal vacuum temperature ramp cycles. Internal calibration data are acquired every time that Mini-RF takes a data collect; a chirp, noise, and tone calibration is done both immediately before and immediately after a data collect. No end-to-end range tests were possible during integration and test, which necessitated the use of in-flight external calibration.
External calibration is planned in-flight by in conjunction with ground-based assets at the Greenbank and the Arecibo Radio Telescopes. These measurements will include polarization purity or axial ratio and antenna pattern. A transmitted signal from the LRO Mini-RF is received by Greenbank while the antenna pattern is scanned over a range of angles. Specifically, the scan will be ±12º from boresight in both elevation and azimuth, sampling at 0.5º increments. At each orientation, mini-RF will transmit for approximately 40 ms. Subsequently, each axis (azimuth or elevation) of the antenna will be parallel to the Earth’s equator, with the boresight pointed towards Greenbank. The antenna will then be scanned parallel to the Earth’s equator, at 0.4º/s 12º in one direction, then back to boresight, then 12º in the other direction, then back to boresight. During scanning, Mini-RF will transmit for 40 ms every 1.25 seconds, corresponding to an angle change between transmits of 0.5º. The scan should take approximately two minutes to complete. An S-band received calibration will also be conducted using signals transmitted from Arecibo following the same geometry as the transmit calibration.

Changing operational requirements for Mini-RF during the mission:
The Mini-RF instrument data has proved to be extremely useful to the project - resulting in requests for considerably more operational time during the mission than was originally planned. In fact, the total data volume for the primary LRO mission increased three hundred-fold from 200 GB to 60 TB - causing in particular operational problems for the POC (Payload Operations Center) at JHU/APL to scale up to the increased demand for science data. The success of the operations team has enabled Mini-RF to support LCROSS targeting and to continue mapping large portions of the Moon at both the polar and equatorial regions. More than 40 TB of Mini-RF science data have been delivered to the PDS (Planetary Data System) as of December 2010.
The Mini-RF team is currently (2011) supporting the LRO two-year extended mission that began on September 15, 2010, throughout which it will continue to gather data, publish results, and support the Lunar Reconnaissance Orbiter.The Mini-RF project anticipates future PDS archive deliveries to be at the same approximate rate while LRO continues to operate in its elliptical orbit. Mini-RF will continue taking non-polar data until the LRO solar arrays are parked due to the high Sun angle. During those semi-annual periods, Mini-RF will renew intense campaigns to collect polar data on every orbit, and add non-polar data when downlink capacity permits. 140)
The two high-data-rate instruments onboard LRO are the LROC (LRO Camera) and Mini-RF. Since Mini-RF was baselined as a technology demonstration with minimal observing time, the spacecraft design connected both instruments to the same SpaceWire bus to send data to the SSDR (Solid State Data Recorder). The design of the light software that managed data on the bus precludes both instruments from operating simultaneously. This was not anticipated to be an issue due to the limited operational time of Mini-RF in the mission baseline plan.
LROC acquires less data during the nighttime portion of the orbits, while Mini-RF radar can operate in the dark. This situation, along with the fact that the high data rate downlink capacity exceeds that required by LROC and the other instruments, allows Mini-RF to collect data at night. This is only done during orbits that include a high data rate downlink using LRO’s White Sands ground station Ka-band capability.
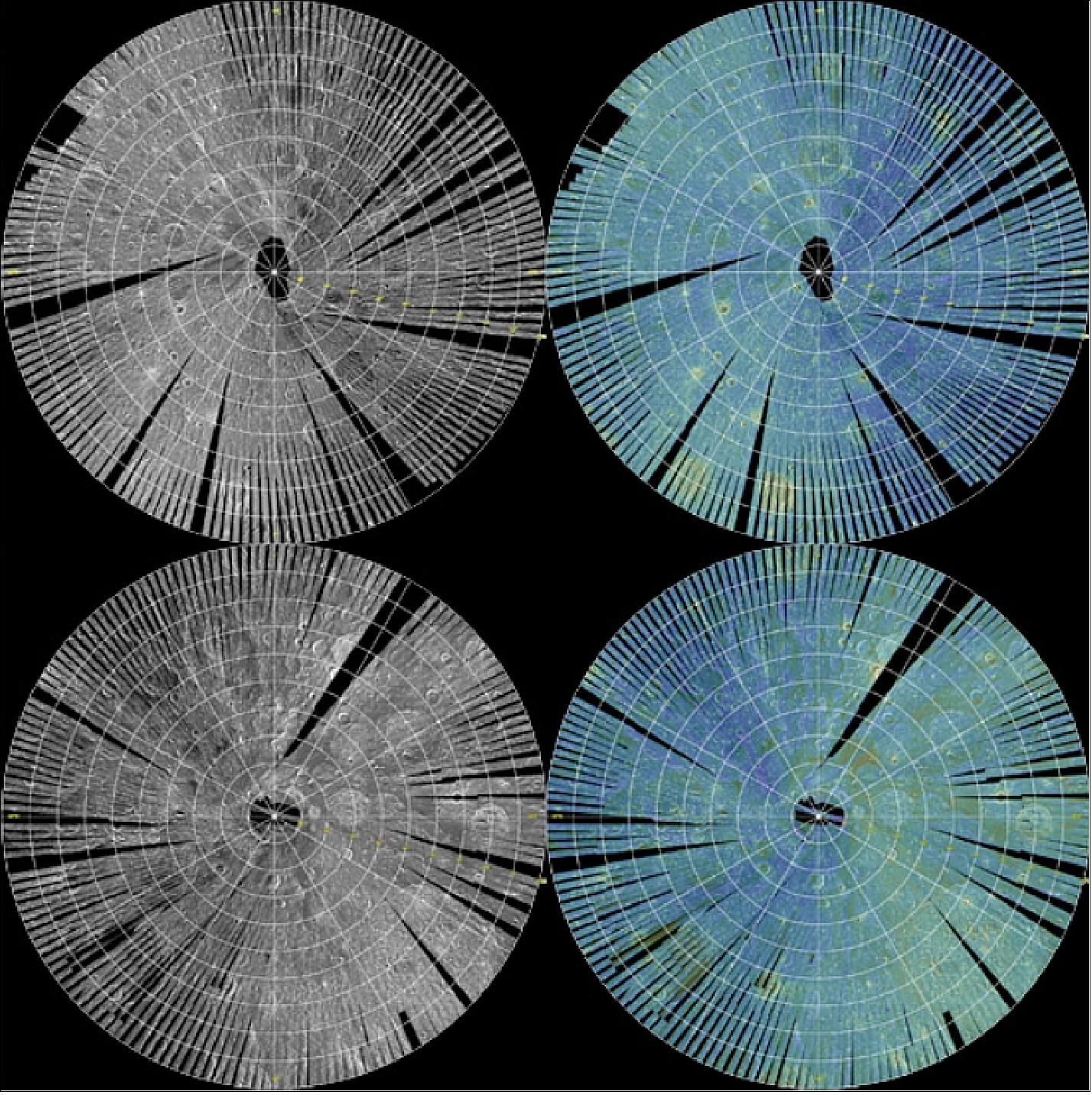
Figure 97 shows some of the images collected by Mini-RF from the LRO spacecraft. These mosaics cover from 70º to the pole for both the north (top) and south (bottom) polar regions. The left-hand images show radar brightness while the right-hand color images also show the circular polarization ratio. Over 500 images collected during the June 2010 portion of the polar campaign are combined into the mosaics shown.
LCROSS (Lunar CRater Observation and Sensing Satellite)
LCROSS is a separate secondary payload spacecraft of NASA/ARC which will be launched on the same Atlas-Centaur rocket (Atlas V 4001) as LRO. After the orbiter (LRO) separates from the Atlas V launch vehicle for its own mission, the LCROSS system will use the spent Centaur upper stage of the rocket as a 2,300 kg lunar impactor, targeting a permanently shadowed crater near the lunar South Pole.
The LCROSS concept was selected for flight by NASA in April 2006 (critical design review in Feb. 2007). The objective of LCROSS is to advance the Vision for Space Exploration (VSE) by identifying, with a high probability of success, the presence of water ice at the moon's south pole. LCROSS carries a 2,300 kg Kinetic Impactor that creates nearly a 1000 metric ton plume of lunar ejecta on impact. This powerful impact is achieved by steering the entire launch vehicle's spent Earth Departure Upper Stage (EDUS) into a crater at the lunar south pole. According to estimates, the Centaur's collision with the moon will excavate about 220 tons of material from the lunar surface. 141) 142) 143) 144)
The scientific basis for the LCROSS mission had roots in the Clementine (1994) and Lunar Prospector (1998) missions which performed complementary forms of resource mapping. This mapping led the lunar science community to conclude that there might be water-ice trapped in permanently-shadowed craters on the moon.
If successful, the LCROSS mission would conduct the first in-situ study of a pristine, permanently shadowed lunar crater and would:
• Confirm the presence of water ice in a permanently shadowed region
• Determine the nature of hydrogen signatures detected at the lunar poles on the previous lunar missions, Clementine and Lunar Prospector
• Determine the amount of water, if present, in the lunar regolith or soil
• Determine the composition of the lunar regolith.
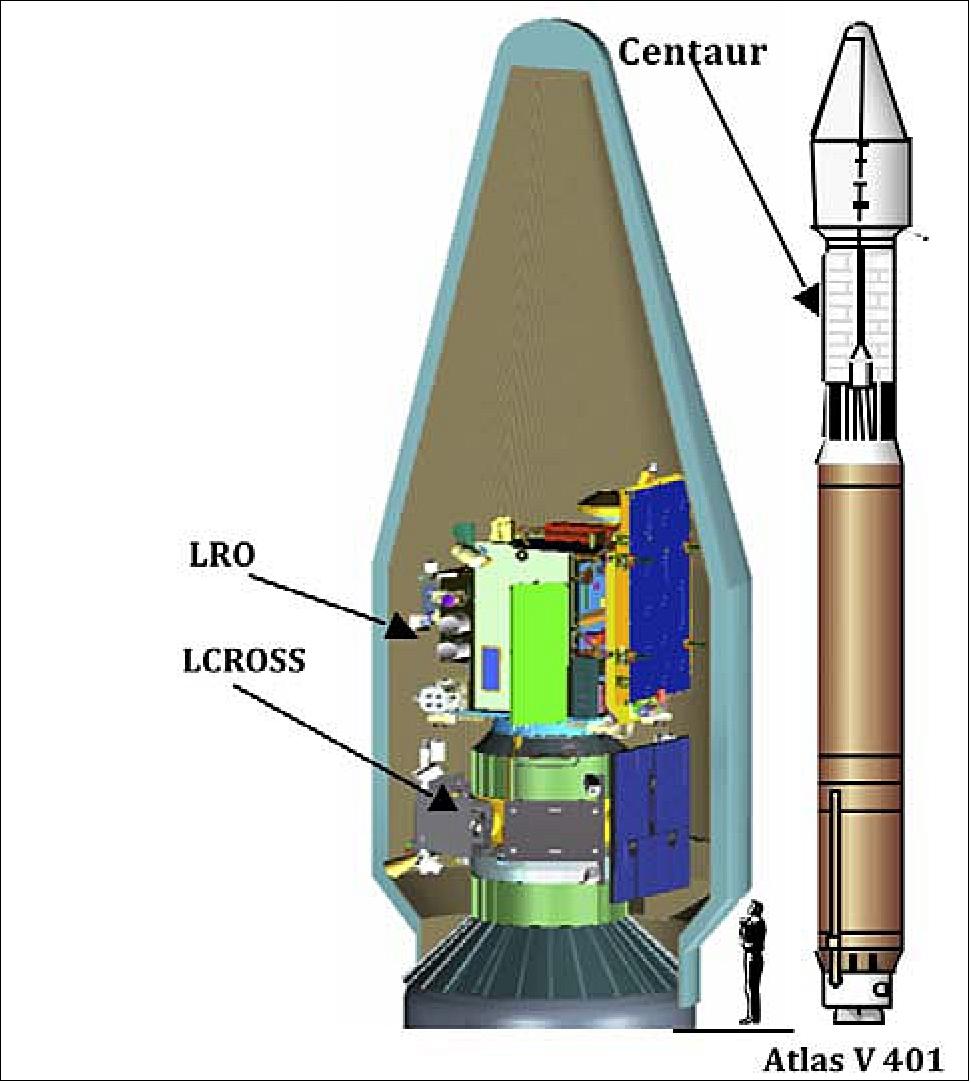
Spacecraft:
LCROSS is a bare-bones spacecraft designed to use cameras and spectrometers to watch its 2200 kg upper stage slam into hydrogen-rich Shackleton Crater. The LCROSS Probe, is referred to as S-S/C (Shepherding Spacecraft) with a mass of about 700 kg. On approach to the moon, the Shepherding Spacecraft will position the upper stage for a precision impact, then separate and perform a braking maneuver in order to observe the upper stage's impact into the moon. Sensors will observe and monitor the debris plume, searching for water ice or vapor. Shortly after the Centaur impact, the Shepherding Spacecraft will also impact the moon, creating a second smaller plume. 145) 146) 147)
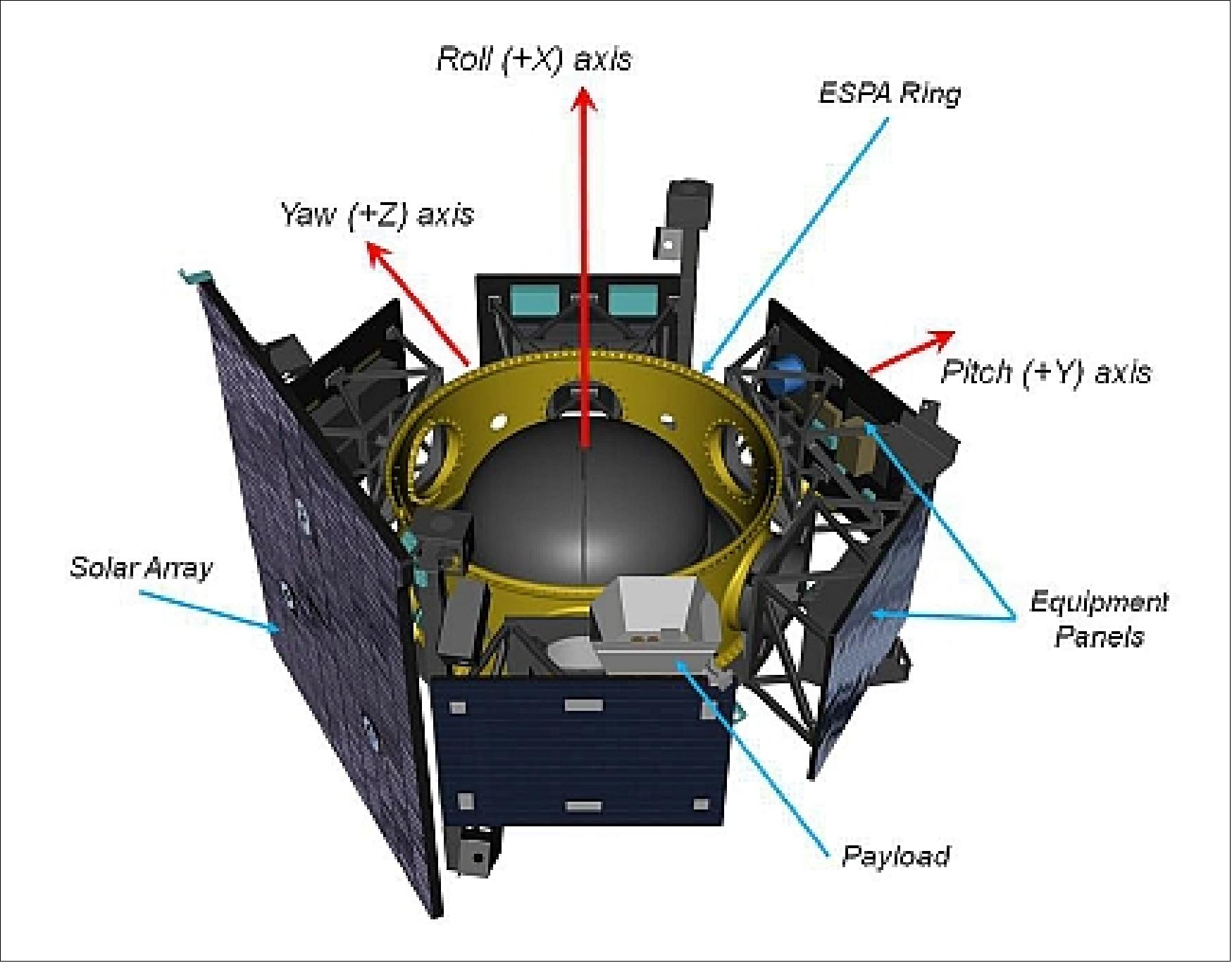
LCROSS is a rapid response mission (26 months to delivery), the NASA/ARC contract for the spacecraft was awarded to NGC (Northrop Grumman Corporation) in 2006. Since LCROSS is a secondary payload to LRO, an ESPA (EELV Secondary Payload Adapter) ring is being used as the interface to the EELV upper stage and the primary payload, LRO. In effect, the ESPA ring serves as the LCROSS spacecraft structure (Figures 99 and 101). The ESPA ring functions as a multifunctional integrating element which supports the LRO adapter; contains an independent set of avionics; a small 344 kg capacity monopropellant-propulsion system, a single-panel body mounted solar array and battery; and mounts for the impact observation instruments, two S-band omni antennas, and 2 medium-gain horns.
The body-mounted solar array is structurally designed to be extremely high frequency and uses a large, 12.5 cm thick honeycomb, ESPA-ring mount. The solar array is sized to provide 650 W with the S-S/C and Centaur stack pointed in a ± 10º ACS (Attitude Control System) dead band to the sun. Standard 28% multi-junction solar cells are used in the array. With the instruments on and transmitting telemetry, the battery system (four 20 Ah batteries) provides nearly 2 hours of operation without charging from the solar array.
The ACS consists of a STA (Star Tracker Assembly), MIMU (Miniature Inertial Measurement Unit), a CSSA (Coarse Sun Sensor Assembly), and the PDE (Propulsion & Deployment Electronics). The ACS is based primarily on LRO hardware and software in the same single strung arrangement. Actuation was provided by a set of eight monopropellant 5 N thrusters. Two additional 22 N thrusters provided orbit maneuvering capability. The ACS featured twelve control mode/submode combinations, six tailored for specific operations while attached to the Centaur, and a second set for use after Centaur separation. The LCROSS propellant tank contained just over 305 kg of hydrazine for both attitude control and orbit maneuvering.
Use of a RAD750-based single-board computer, communications card, and power and thruster control electronics. Onboard communications employ mixed SpaceWire and MIL-STD 1553 buses. The LCROSS flight software is derived heavily from software on previous programs, including EO-1 and WMAP.
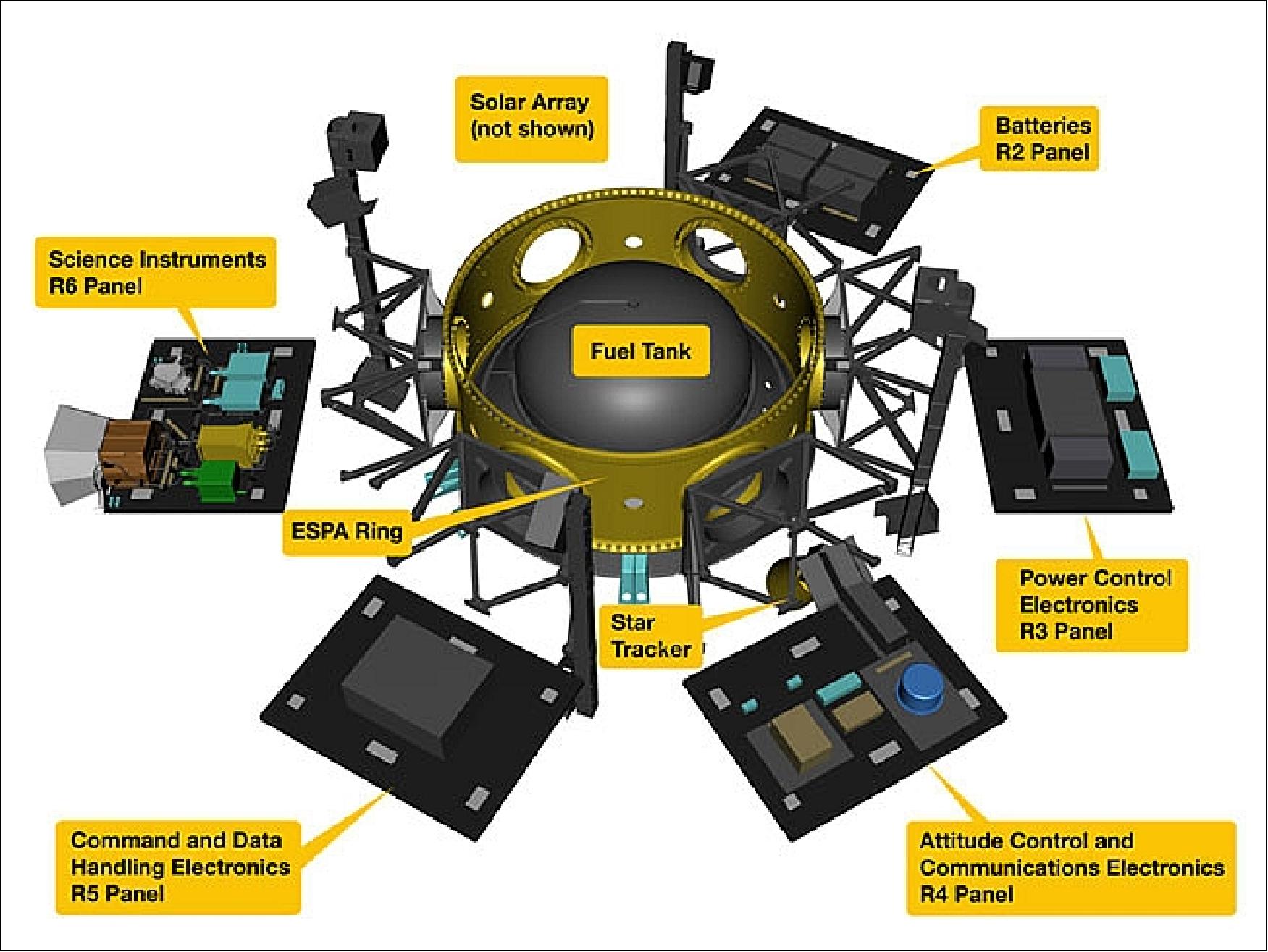
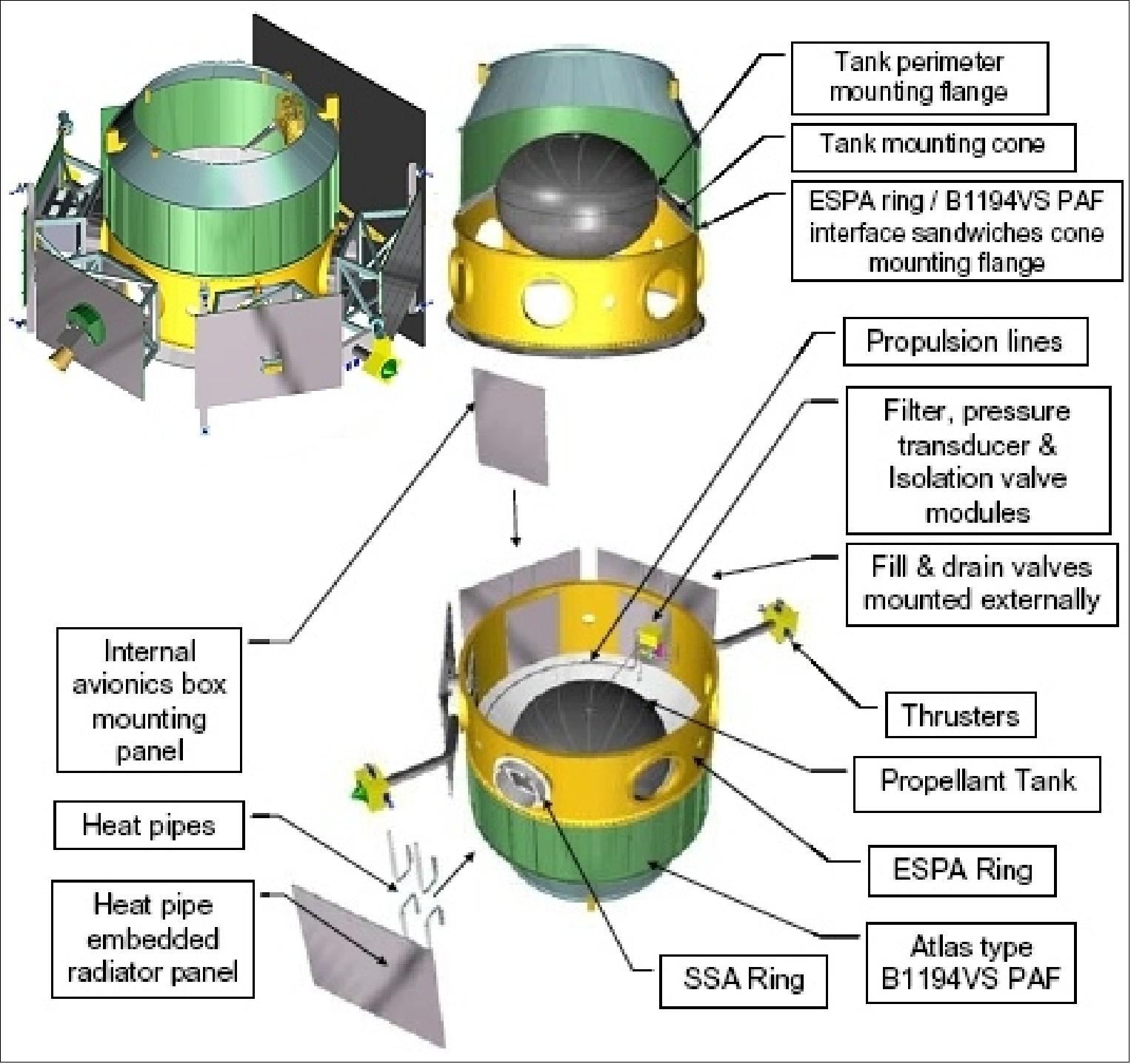
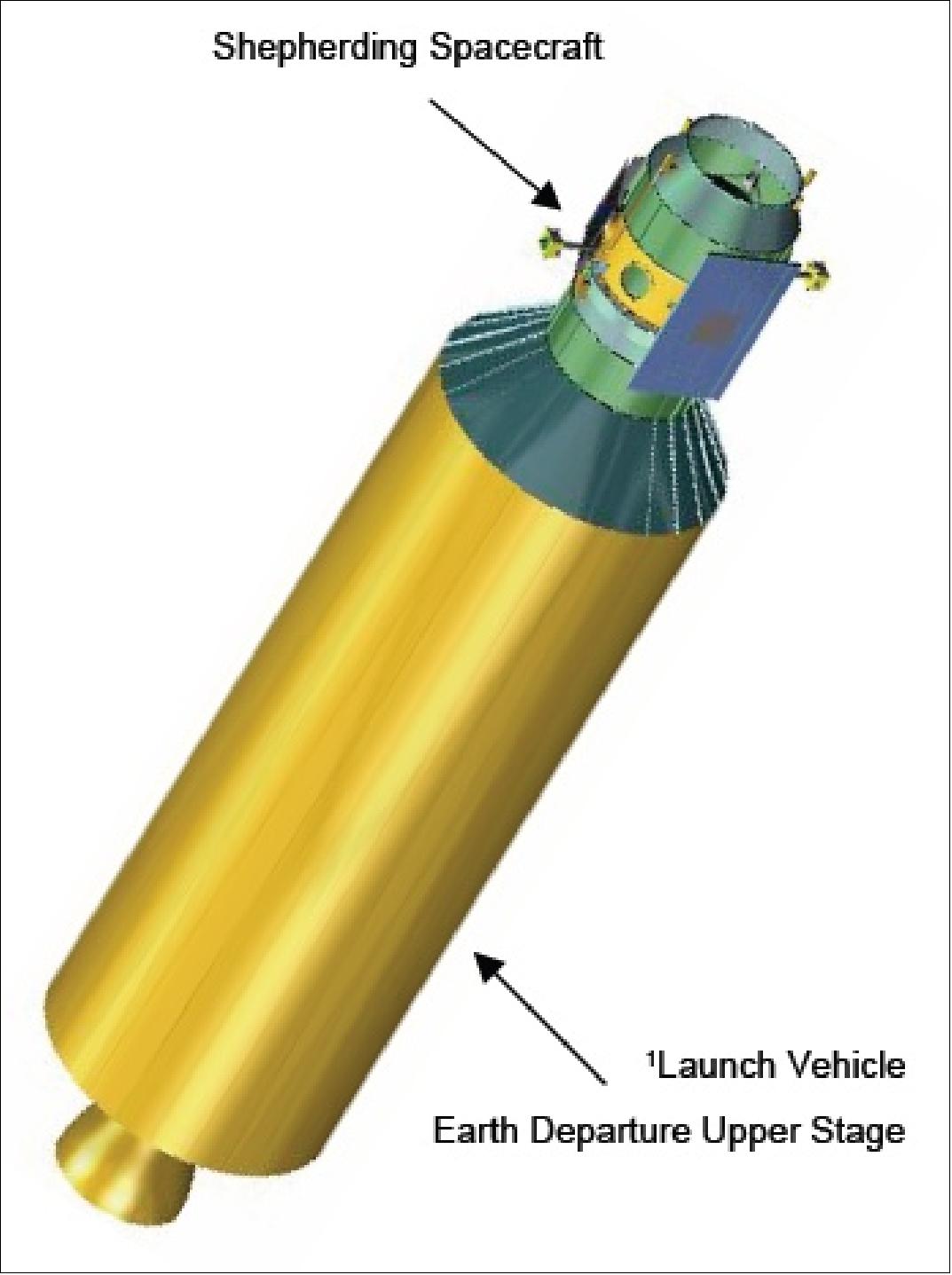
RF communications: The LCROSS communication baseline system (S-band) is single-strung (two omnidirectional antennas and two medium-gain antennas) and can deliver 1.5 Mbit/s real-time data from the moon to the DSN (Deep Space Network) 70 m dish using one of the two medium gain horn antennas, or can deliver 40 kbit/s using one of the two omni antennas, pointed ±30º from Earth. The S-S/C uses the existing LRO transponder (along with other LRO passive microwave components). At least one of the three DSN sites has visibility to the spacecraft at all times.
Instruments of S-S/C:
The LCROSS science payload, developed at NASA ARC, combined processing and control electronics DHU (Data Handling Unit) with nine instruments to aid in water detection. The DHU accommodated all sensor interfaces, all digital video system functionality and all interfaces with the S-S/C avionics. The instrument package comprised 5 cameras (1 visible, 2 NIR, 2 Mid IR), 3 spectrometers (1 visible, 2 NIR) and one photometer with a total mass of 12.4 kg, a power consumption of 27 W, and a total data rate of 554.5 kbit/s.
Eight of nine instruments were co-aligned along the S-S/C longitudinal axis and provided nadir-pointed sensing during the Centaur impact event. One of two near-infrared spectrometers was side-pointed to provide spectra of sunlit material rising in the Centaur ejecta plume. A spring-loaded cover protected the nadir-looking instruments from direct sun exposure during launch and through the early part of the mission.
• Visible and NIR (Near Infrared) cameras (3). The objective is to: 1) observe the impact of EDUS, and 2) observe ejecta cloud morphology and evolution. For the visible sensor, a high-end broadcast-quality CCD video camera is being used outputting PAL format (752 H x 582 V pixels). FOV= 6º, resolution < 0.5 km.
• Mid-IR imagers (2). The objective of these two cameras (in 2 wavelengths: 7 and 12.3 µm) is to look down on the permanently shadowed lunar surface to map pre-impact terrain (warmer vs cooler = rocks vs regolith), thermal evolution of plume (dependent upon H2O vapor concentration in plume), ejecta blanket, and freshly exposed regolith. The baseline mid-IR sensors will be a flight-proven alpha-silicon uncooled micro-bolometer, most sensitive in the 7-14 µm spectral range, the data output is in PAL format (384 H x 288 V pixels).
• NIR spectrometers (2 COTS instruments). The objective is to monitor spectral bands (every second) associated with water vapor, ice, and hydrated minerals in NIR (1.35-2.45 µm, ~0.01 µm spectral resolution) covering the first overtones of H2O ice (band is free of interference, more brightly illuminated by sunlight than fundamentals near 3 µm).
The regions near 1.4 and 1.9 µm (usually obscured by Earth's atmosphere) also provide sensitive indication of water vapor from ice, shape of band may provide info regarding nature of ice crystals and mineral hydrate. Broad minima at 1.5 and 2.0 µm are indicative of water ice. Resolution: 1 km. The two identical NIR spectrometers are being coupled with fiber optics to telescopes, one focused along the impactor trajectory, the second aimed laterally through the plume towards the limb during the last ten seconds before S-S/C impact.

• Visible total luminance diode (1). Broadband from 0.4 - 0.9 µm, sample rate >100 Hz, power: < nW NEP @ 100 Hz. The goal is to observe the impact flash.
- Light flash due to thermal heating and vaporization
- Shape of the flash's light curve can be used to determine certain initial conditions of the impact
- Flash peak intensity depends on impact velocity angle, target & projectile types.
Sequence of events:
• After launch, the LCROSS spacecraft will arrive in the lunar vicinity independent of the LRO satellite. On the way to the moon, the LCROSS spacecraft's two main parts, the S-S/C and the Centaur Upper Stage, will remain coupled.
• As the spacecraft approaches the moon's south pole, the Centaur (EDUS) will separate, and then will impact a crater in the moon's polar region. The impact speed is estimated to be ~2.5 km/s, and a resulting moon crater of size 30 m in diameter and 4.8 m in depth is expected - tossing up about 200 tons of lunar debris.
• A plume from the Centaur crash will develop as the S-S/C heads in towards the moon. The S-S/C (mass of 700 kg) will fly through the plume, and six instruments (cameras and spectrometers) on the spacecraft will analyze the cloud to look for signs of water and other compounds.
• About 15 minutes after the upper stage booster's impact the S-S/C will also crash into the crater floor of the moon
• In addition, spaceborne and earth-based instruments will be pointed to the moon's south pole to study the huge plume, which scientists expect to be larger than 200 metric tons.
LCROSS mission status:
• LCROSS was cast as a Class D mission, which means it can accept more technical risk than other mission types in NASA. So why have “freeboard”, a.k.a. Extra technical margin? One of the ways that LCROSS kept its risk in check was by keeping complexity as low as possible while satisfying project requirements. To address the remaining complexity in the design, having technical performance measures which have a fair amount of margin could be invaluable. This extra margin is a commodity that can be used in many different and sometimes unplanned ways during the mission. Extra fuel, power, thermal, or RF link can provide operational degrees of freedom when anomalies are encountered. 148)
LCROSS programmatic summary (Ref. 144)
The key to capabilities-driven, cost capped missions like LCROSS is to keep it simple and to manage the risk. It is not about eliminating risk, which is very costly. It is about managing risk to a level commensurate with project programmatic constraints. LCROSS did this by making use of existing investments by the Agency, existing commercial hardware, and being sufficiently creative to see opportunities to buy-down risk.
Ultimately, LCROSS succeeded because the individuals and organizations in the LCROSS team walked and shared road on a mission to the moon and worked together to make it succeed. Each party on this team had both mutual and self-interests for why they wanted to participate. The Agency wanted to show there was an effective way to make use of excess launch capability and to work cheaply; NASA/ARC wanted to show it was able to run small, fast-paced, light-weight missions; NG (Northrop Grumman) wanted to show that it could be nimble and carve out a new market for itself; and the commercial sector found an onramp to space and lunar applications which could propel their businesses into a new market. One of the great successes of LCROSS was aligning each the team member’s needs into a common purpose which benefited everyone in a win-win-win scenario.
• In Nov. 2009, preliminary data of LCROSS indicate that the mission successfully uncovered water during the Oct. 9, 2009 impacts into the permanently shadowed region of Cabeus crater near the moon’s south pole. 149)
• On October 9, 2009, the LCROSS spacecraft was slammed into a crater near the lunar south pole. No light flash was visible in the thermal images broadcast on NASA television, as the 2.3 ton rocket impacted the Cabeus crater at 11:31 UTC. A second shepherding spacecraft flew through the debris plume, collecting and relaying key data back to Earth before it too plowed into the lunar surface, according to NASA. The LCROSS mission is hoping to uncover whether there is water or ice below the moon's surface that could be used by astronauts on future space missions. 150) 151)
Even without big explosions or bright plumes of ejecta, for all intents and purposes it appears LCROSS's impact on the moon was a smashing success. While the mainstream media and the public seemed disappointed in the lack of visual data, mission managers said the mission has garnered plenty of spectroscopic data, and that's where the real science can be found.
• Centaur separation was performed successfully 9 hours 40 minutes prior to Centaur impact (Ref. 145). One minute following separation, the S-S/C flipped 180º to point the payload at the receding Centaur. The spacecraft payload was activated to transmit imagery of the Centaur for 15 minutes (via 70 m DSN antenna), to determine whether the separation had caused the Centaur to tumble. Forty minutes after separation, the S-S/C performed the Braking Burn, a ΔV maneuver used to induce a four-minute delay between the Centaur and S-S/C impact events (598 km range at Centaur impact).
• On Sept. 9, NASA selected the target crater for lunar impact. LCROSS is racing toward a double-impact on the moon at 7:30 am EDT on Oct. 9, 2009. The target crater is Cabeus A. It was selected after an extensive review of the best places to excavate frozen water at the lunar south pole. 152) 153)
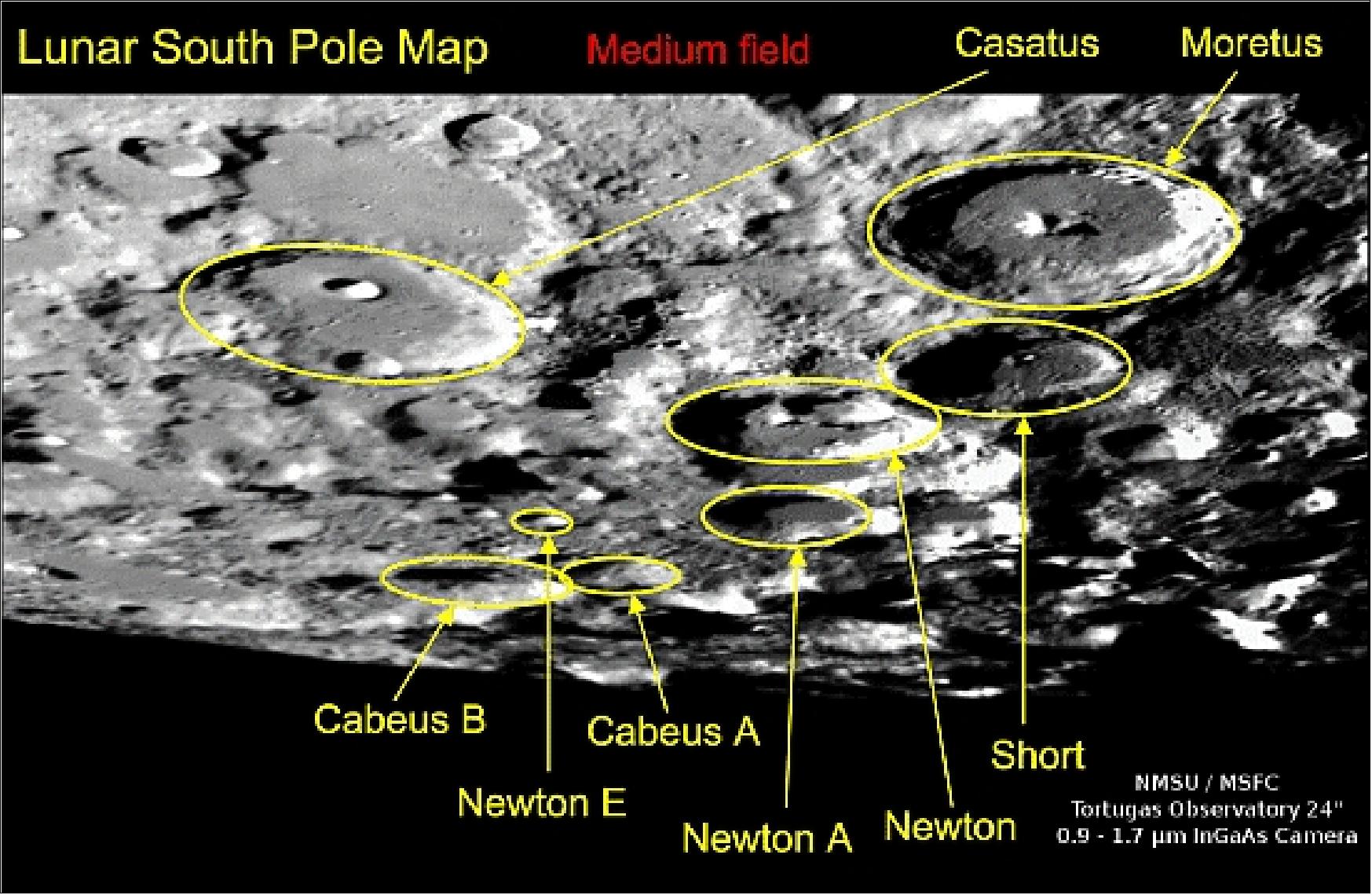
• On June 23, 2009, LCROSS successfully completed its most significant early mission milestone with a lunar swingby and calibration of its science instruments. With the assist of the moon's gravity, LCROSS and its attached Centaur booster rocket successfully entered into polar Earth orbit. The maneuver puts the spacecraft and Centaur on course for a pair of impacts near the moon's south pole on Oct. 9, 2009. 154)

LRO ground segment:
LRO’s routine support requirements include: 155) 156)
• 30 minutes of S-band tracking per 113 minute lunar orbit
- Range and range rate measurements
- Commanding
- Realtime housekeeping telemetry
• 600 Gbit per day of Ka-band downloads
- Recorded science data
- Recorded housekeeping telemetry
- CCSDS CFDP protocol with loop closed via S-band
The LRO ground segment is comprised of the following elements:
• Mission Operations Center & Flight Dynamics Facility at GSFC
• Primary Ground Station at White Sands (Ka-band and S-band)
• Global S-band TT&C provided by NASA GN & SN
• SOC (Science Operations Centers) at PI institutions
• S-band tracking augmented by laser ranging system to improve accuracy.
Routine Operations Network:
The WS1 (White Sands 1) station will provide the Ka-band download service as well as S-band coverage for all of the LRO orbits visible from White Sands (approximately 45% of all LRO orbits).
Note: In Nov. 2007, NASA/GSFC showcased the new operational 18 m near-Earth Ka-band antenna network (a three antenna network), the first in NASA history, during a ribbon cutting ceremony (Nov. 8 2007) at the White Sands Complex, N.M. White Sands was chosen as the location for the new antennas because of the existing infrastructure available there, making it a cost effective option. Two of the three antennas will be used to accommodate the continuous high volume data stream of SDO (Solar Dynamics Observatory). The third antenna will be used for LRO and will have the highest data volume stream ever received from a lunar spacecraft. 157)
A five station network (WS1, Dongara, Weilheim, Kiruna, and Hawaii) provides nearly complete S-band coverage above 5º elevation with 81% multistation coverage for scheduling flexibility.
• LRO S-band support consists of alternating 56 minute view / no view periods for TT&C functions.
• Ka-band support consists of at least four 56 minute views per day from WS1. Ka-band utilization is approximately 61% of capacity.
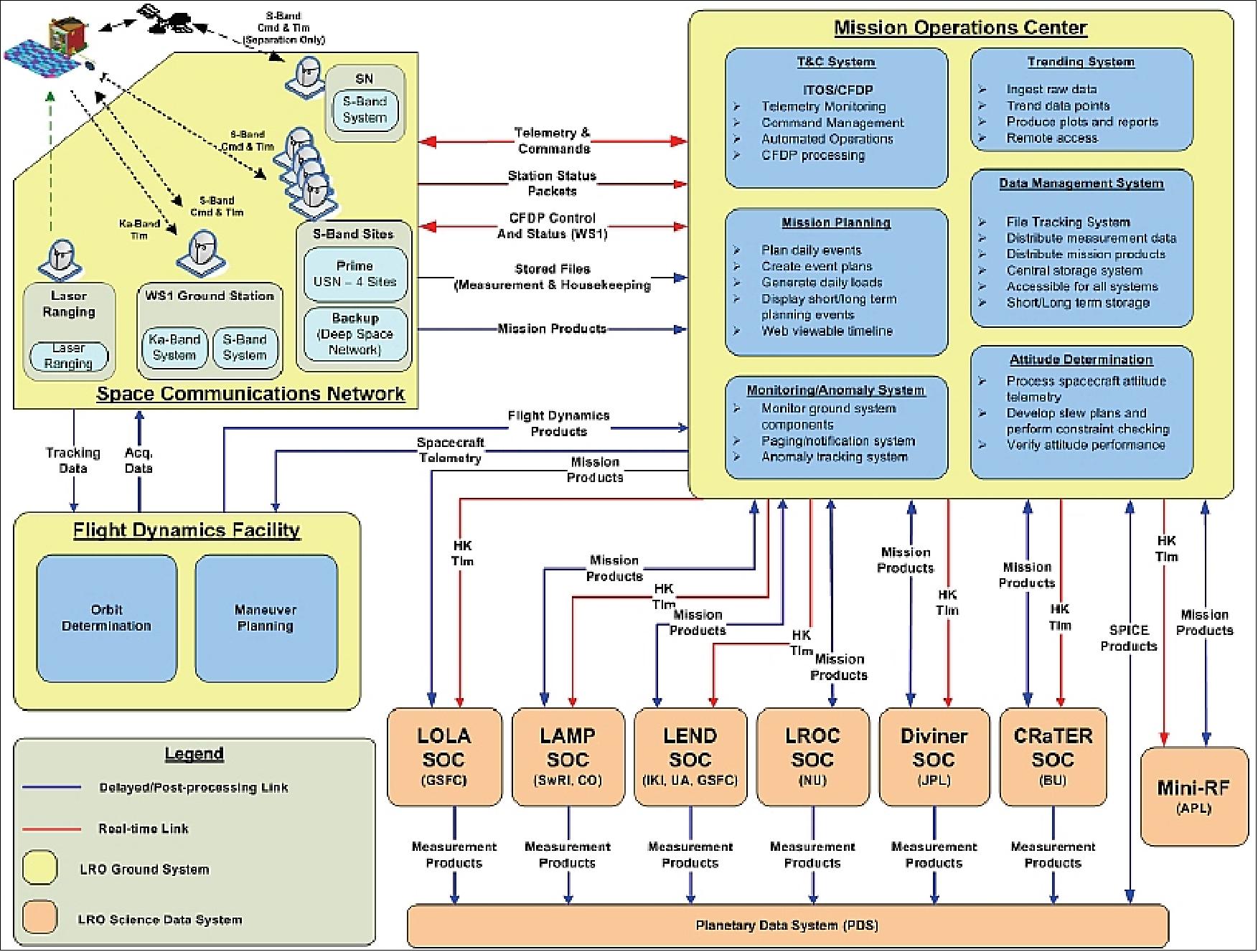
To make the LRO observations accessible to both human exploration planners as well as the science community, calibrated LRO data will be rapidly deposited into the PDS (Planetary Data System) by each instrument SOC (Science Operations Center). Figure 111 illustrates the locations where the various LRO observational data and data products will be located. Each instrument team is required to submit to the PDS several types of data products. Typically Level 0 data products are raw data in the form of counts accumulated during specific time intervals of measurements, with orbital information and engineering parameters. Higher level data products consist generally of count rates converted into physical units and projected onto the lunar surface as maps of geophysical quantities.
Each instrument SOC is required to deliver validated and calibrated data to the PDS every three months, starting six months after the beginning of the primary Exploration Mission (i.e., March 15, 2010). The initial delivery will include all measurements made from the time of launch through the first three months of the primary orbit (e.g., June 18 to December 15, 2009). Subsequent deliveries will be made every three months after the first delivery and will include all data that is no more than three months old. After the Exploration Mission ends, some investigations plan to reprocess data and develop higher level composite data products. These will be delivered to the PDS no later than six months after end of the Exploration Mission.
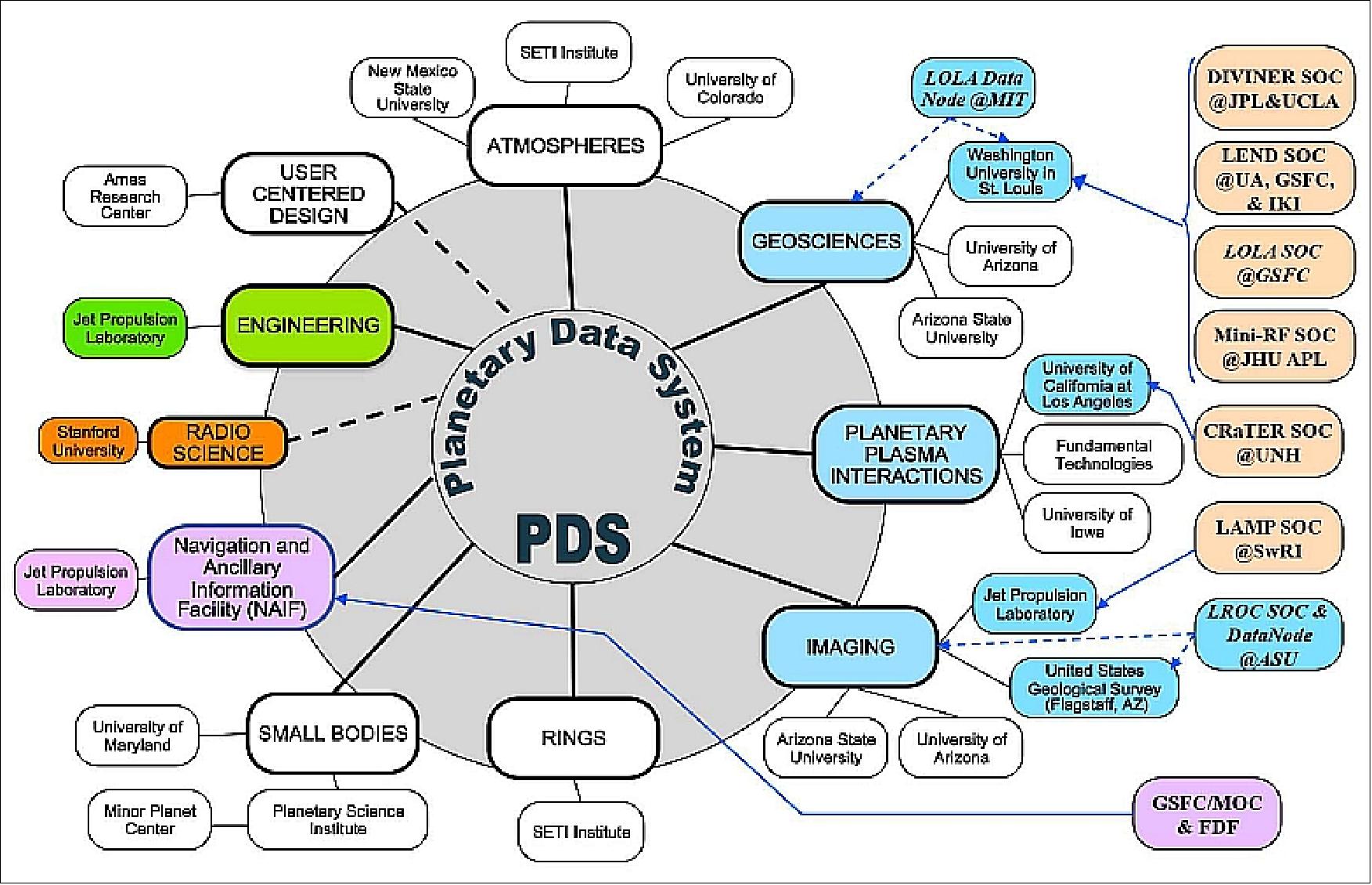
References
1) http://lunar.gsfc.nasa.gov/
2) C. Tooley, “Lunar Reconnaissance Orbiter - Project Overview & Status,” Dec. 3, 2006, URL: http://lunar.gsfc.nasa.gov/library/LRO_Plenary_Session.pdf
3) G. Chin. S. Brylow, M. Foote, J. Garvin, J. Kasper, J. Keller , M. Litvak, I. Mitrofanov, D. Paige, K. Raney, M. Robinson, A. Sanin, D. Smith, H. Spence, P. Spudis, S. Alan Stern, M. Zuber, “Lunar Reconnaissance Orbiter Overview: The Instrument Suite and Mission,” Space Science Reviews, Vol. 129, No 4, April 2007, pp. 391-419, URL: http://lunar.gsfc.nasa.gov/library/LRO_Space_Science_Paper.pdf
4) http://www.nasa.gov/mission_pages/LRO/main/index.html
5) Benjamin Neumann, “Commercial Development Summit,” May 13, 2008, URL: http://commercialspace.pbwiki.com/f/Public+LRO-LCROSS.pdf
6) Stephen F. Andrews, Mar tin Houghton, Rick Saylor, “Building Fault Tolerance into NASA's Linar Reconnaissance Orbiter,” Proceedings of the AAS Guidance and Control Conference, Breckenridge, CO, USA, Feb. 1-6, 2008, AAS 08-036
7) Jim Simpson, Jason Badgley, Ken McCaughey, Kristen Brown, Philip Calhoun, Edward Davis, Joseph Garrick, Nathaniel Gill, Oscar Hsu, Noble Jones, Gerardo Ortiz-Cruz, Juan Raymond, Russell Roder, Neerav Shah, John Wilson, “Integration and Testing of the Lunar Reconnaissance Orbiter Attitude Control System,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011,
8) C. Tooley, “Lunar Reconnaissance Orbiter Spacecraft & Objectives,” AIAA Annual Technical Symposium, Houston, TX, USA, May 19, 2006, URL: http://lunar.gsfc.nasa.gov/library/tooley-scobjectives-51906.pdf
9) R. Berger, A. Dennis, D. Eckhardt, S. Miller, J. Robertson, D. Saridakis, D. Stanley, M. Vancampen, Q Nguyen, “RAD750TM SpaceWire-Enabled Flight Computer for Lunar Reconnaissance Orbiter,” International SpaceWire Conference 2007, Dundee, Scotland, UK, Sept. 17-19, 2007, URL: http://www.spacewire.computing.dundee.ac.uk/proceedings/Papers/Onboard%20Equipment%20and%20Software/berger.pdf
10) Stephen F. Andrews, Martin Houghton, Rick Saylor, “Building Fault Tolerance into NASA's Lunar Reconnaissance Orbiter,” Proceedings of the AAS Guidance and Control Conference, Breckenridge, CO, USA, Feb. 1-6, 2008, paper: AAS 08-036
11) Steve Parkes, Yuriy Sheynin, Masaharu Nomachi, “SpaceWire Missions and Architectures,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B2.6.2
12) “NASA launches two probes to the moon,” Moon Daily, June 18, 2009, URL: http://www.moondaily.com/reports/NASA_launches_two_probes_to_the_moon_999.html
13) NASA Press Kit , June 2009, “Lunar Reconnaissance Orbiter (LRO): Leading NASA’s Way Back to the Moon; Lunar Crater Observation and Sensing Satellite (LCROSS): NASA’s Mission to Search for Water on the Moon,” URL: http://www.nasa.gov/pdf/360020main_LRO_LCROSS_presskit2.pdf
14) Michael Mesarch, Mark Beckman, David Folta, Rivers Lamb, Karen Richon, “Maneuver Operations Results from the Lunar Reconnaissance Orbiter (LRO) Mission,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: 2010-1985
15) A. Rodríguez-Arroyo, “Lunar Reconnaissance Orbiter Critical Design Review RF Communications, Nov. 6-9, 2006
16) Rick Saylor, “LRO Mission Operations Concept,” NASA,GSFC, URL: http://snebulos.mit.edu/projects/crater/docs/presentations/tim-050414/r-Operations.pdf
17) Bill Steigerwald, ”NASA’s LRO Finds Lunar Pits Harbor Comfortable Temperatures,” NASA Feature, 26 July 2022, URL: https://www.nasa.gov/feature/goddard/2022/lro-lunar-pits-comfortable
18) Tyler Horvath, Paul O. Hayne, David A. Paige, ”Thermal and Illumination Environments of Lunar Pits and Caves: Models and Observations From the Diviner Lunar Radiometer Experiment,” Geophysical Research Letters, Volume49, Issue14, Published: 28 July 2022, e2022GL099710, https://doi.org/10.1029/2022GL099710, URL: https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2022GL099710
19) Mark Robinson, Rob Garner, ”NASA's Lunar Reconnaissance Orbiter Spots Rocket Impact Site on Moon,” NASA Feature, 24 June 2022, URL: https://www.nasa.gov/feature/goddard/2022/nasas-lunar-reconnaissance-orbiter-spots-rocket-impact-site-on-moon
20) ”NASA Extends Exploration for 8 Planetary Science Missions,” NASA Feature, 25 April 2022, URL: https://www.nasa.gov/feature/nasa-extends-exploration-for-8-planetary-science-missions
21) Bill Steigerwald, ”Teaching an Old Spacecraft New Tricks to Continue Exploring the Moon,” NASA Feature, 11 February 2021, URL: https://www.nasa.gov/feature/goddard/2021/lro-new-tricks
22) Vickie Johnson, ”The Naming of Tooley Crater,” NASA Feature, 26 January 2021, URL: https://www.nasa.gov/feature/goddard/2021/the-naming-of-tooley-crater
23) ”Small Water Ice Reservoirs Dot the Lunar Surface,” PSI (Planetary Science Institute) Tuscon, AZ, 26 October 2020, https://psi.edu/news/lunarcoldtraps
24) P. O. Hayne, O. Aharonson & N. Schörghofer, ”Micro cold traps on the Moon,” Nature Astronomy, Published: 26 October 2020, https://doi.org/10.1038/s41550-020-1198-9
25) Jeremy Rehm, Nancy Neal Jones, ”Radar Points to Moon Being More Metallic Than Researchers Thought,” NASA Feature, 1 July 2020, URL: https://www.nasa.gov/feature/goddard/2020/moon-more-metallic-than-thought
26) E. Heggy, E. M. Palmer, T. W. Thompson, B. J. Thomson, G. W. Patterson, ”Bulk composition of regolith fines on lunar crater floors: Initial investigation by LRO/Mini-RF,” Earth and Planetary Science Letters, Volume 541, 1 July 2020, 116274, https://doi.org/10.1016/j.epsl.2020.116274
27) ”Research reveals possibly active tectonic system on the Moon,” Brown University, 30 April 2020, URL: https://www.brown.edu/news/2020-04-30/tectonics
28) A. Valantinas, P. H. Schultz, ”The origin of neotectonics on the lunar nearside,” Geology, Published: 13 April 2020, https://doi.org/10.1130/G47202.1
29) ”USGS Releases First-Ever Comprehensive Geologic Map of the Moon,” USGS News Release, 20 April 2020, URL: https://www.usgs.gov/news/usgs-releases-first-ever-comprehensive-geologic-map-moon
30) Karl Hille, ”Vikram Lander Found,” NASA, 2 December 2019, URL: https://www.nasa.gov/image-feature/goddard/2019/vikram-lander-found
31) ”Lunar Reconnaissance Orbiter,” NASA, 11 July 2019, URL: https://solarsystem.nasa.gov/missions/lro/in-depth/
32) ”Lunar South Pole Atlas—a new online reference for mission planners,” Phys.org, 17 May 2019, URL: https://phys.org/news/2019-05-lunar-south-pole-atlasa-online.html
33) ”Lunar Images and Maps,” USRA, 2019, URL: https://www.lpi.usra.edu/lunar/lunar_images/
34) ”Study Finds New Wrinkles on Earth's Moon,” NASA/JPL News, 13 May 2019, URL: https://www.jpl.nasa.gov/news/news.php?release=2019-086
35) Thomas R. Watters, Renee C. Weber, Geoffrey C. Collins, Ian J. Howley, Nicholas C. Schmerr & Catherine L. Johnson, ”Shallow seismic activity and young thrust faults on the Moon,” Nature GeoScience, Published: 13 May 2019, https://doi.org/10.1038/s41561-019-0362-2
36) ”LAMP instrument sheds light on lunar water movement, Moon's dayside water molecules migrate over the course of a day,” Science Daily, 8 March 2019, URL: https://www.sciencedaily.com/releases/2019/03/190308133352.htm
37) Amanda R. Hendrix, Dana M. Hurley, William M. Farrell, Benjamin T. Greenhagen, Paul O. Hayne, Kurt D. Retherford, Faith Vilas, Joshua T. S. Cahill, Michael J. Poston, Yang Liu, ”Diurnally-Migrating Lunar Water: Evidence from Ultraviolet Data,” Geophysical Research Letters, First published 21 February2019, https://doi.org/10.1029/2018GL081821
38) Lonnie Shekhtman, ”NASA's Moon Data Sheds Light on Earth’s Asteroid Impact History,” NASA, 17 January 2019, URL: https://www.nasa.gov/feature/goddard/2019/scientists-find-increase-in-asteroid-impacts-on-ancient-earth-by-studying-the-moon
39) Sara Mazrouei, Rebecca R. Ghent, William F. Bottke, Alex H. Parker, Thomas M. Gernon, ”Earth and Moon impact flux increased at the end of the Paleozoic,” Science: Volume 363, Issue 6424, pp: 253-257, 18 January 2019, DOI: 10.1126/science.aar4058
40) Jeff Foust, ”NASA lunar orbiter now supporting commercial and international missions,” Space News, 10 December 2019, URL: https://spacenews.com/nasa-lunar-orbiter-now-supporting-commercial-and-international-missions/
41) Elizabeth Howell, ”This NASA Video Tour of the Moon in 4K Is Simply Breathtaking,” Space.com, 11 April 2018, URL: https://www.space.com/40274-nasa-moon-in-4k-video-tour.html
42) Robbin Ray, ”UNH Researchers find space radiation is increasingly more hazardous,”University of New Hampshire Newsroom, 15 March 2018, URL: https://www.unh.edu/unhtoday/news/release/2018/03/15/unh-researchers-find-space-radiation-increasingly-more-hazardous
43) N. A. Schwadron, F. Rahmanifard, J. Wilson, A. P. Jordan, H. E. Spence, C. J. Joyce, J. B. Blake, A. W. Case, W. de Wet, W. M. Farrell, J. C. Kasper, M. D. Looper, N. Lugaz, L. Mays, J. E. Mazur, J. Niehof, N. Petro, C. W. Smith, L. W. Townsend, R. Winslow, C. Zeitlin, ”Update on the worsening particle radiation environment observed by CRaTER and implications for future human deep-space exploration,” Space Weather, 22 Feb. 2018, URL of abstract: http://onlinelibrary.wiley.com/doi/10.1002/2017SW001803/abstract
44) Elizabeth Zubritsky, ”On Second Thought, the Moon's Water May Be Widespread and Immobile,” NASA/GSFC, 23 Feb. 2018, URL: https://www.nasa.gov/feature/goddard/2018/on-second-thought-the-moons-water-may-be-widespread-and-immobile
45) Joshua L. Bandfield, Michael J. Poston, Rachel L. Klima, Christopher S. Edwards, ”Widespread distribution of OH/H2O on the lunar surface inferred from spectral data,” Nature Geoscience, doi:10.1038/s41561-018-0065-0, Published online: 12 February 2018, URL of Abstract: https://www.nature.com/articles/s41561-018-0065-0
46) Nancy Neal Jones, ”Camera on NASA’s Lunar Orbiter Survived 2014 Meteoroid Hit,” NASA, May 26, 2017, URL: https://www.nasa.gov/feature/goddard/2017/camera-on-nasas-lunar-orbiter-survived-2014-meteoroid-hit
47) Information provided by Noah Petro, LRO deputy project scientist of NASA/GSFC, Greenbelt, MD.
48) Bill Steigerwald, ”NASA Study Finds Solar Storms Could Spark Soils at Moon's Poles,” NASA, Jan. 6, 2017, URL: https://www.nasa.gov/feature/goddard/2017/solar-storms-charge-lunar-soil
49) A. P. Jordan , T. J. Stubbs, J. K. Wilson, N. A. Schwadron, H. E. Spence, ”The rate of dielectric breakdown weathering of lunar regolith in permanently shadowed regions,” Icarus, Aug. 31, 2016, DOI: 10.1016/j.icarus.2016.08.027, Vol. 283, pp: 352-358, Feb. 2017
50) Kimberly Williams, ”Ancient Polar Ice Reveals Tilting of Earth’s Moon,” NASA, March 23, 2016, URL: http://www.nasa.gov/ames/feature/lunar-polar-ice-reveals-tilting-axis-of-earth-s-moon
51) M. A. Siegler, R. S. Miller, J. T. Keane, M. Laneuville, D. A. Paige, I. Matsuyama, D. J. Lawrence, A. Crotts, M. J. Poston, ”Lunar true polar wander inferred from polar hydrogen,” Nature Letter, Vol. 531, pp: 480-482, March 24, 2016, doi:10.1038/nature17166, Published online on 23 March 2016, URL of abstract: http://www.nature.com/nature/journal/v531/n7595/full/nature17166.html
52) Bill Steigerwald, ”NASA Releases New High-Resolution Earthrise Image,” NASA, Dec. 18, 2015, URL: http://www.nasa.gov/image-feature/goddard/lro-earthrise-2015
53) Mark Robinson, ”Looking Over The Limb,” ASU (Arizona State University), Dec. 18, 2015, URL: http://lroc.sese.asu.edu/posts/895
54) Nancy Neal-Jones, William Steigerwald, “NASA's LRO Discovers Earth's Pull is 'Massaging' our Moon,” NASA, Press Release 15-34, Sept. 15, 2015, URL: https://www.nasa.gov/press-release/goddard/shrinking-moon-tides
55) Nancy Neal Jones, “NASA's LRO Moves Closer to the Lunar Surface,” NASA, May 5, 2015, URL: http://www.nasa.gov/feature/goddard/nasas-lro-moves-closer-to-the-lunar-surface
56) K. A. Shirley, T. D. Glotch, B. T. Greenhagen, M. White and the Diviner Science Team, “A multiplicative approach to correcting the thermal channels for the Diviner Lunar Radiometer Experiment,” 46th LPSC (Lunar and Planetary Science Conference), The Woodlands, TX, USA, March 16-20, 2015, paper: 1992, URL: http://www.hou.usra.edu/meetings/lpsc2015/pdf/1992.pdf
57) Bill Steigerwald, “NASA's LRO Discovers Lunar Hydrogen More Abundant on Moon's Pole-Facing Slopes,” NASA, Feb. 4, 2015, URL: http://www.nasa.gov/content/goddard/lro-lunar-hydrogen/
58) Dwayne Brown, Nancy Neal-Jones, Elizabeth Zubritsky, “NASA Mission Finds Widespread Evidence of Young Lunar Volcanism,” NASA News Release 14-284, URL: http://www.nasa.gov/press/2014/october/nasa-mission-finds-widespread-evidence-of-young-lunar-volcanism/#.VDttihZvj_W
59) Tony Phillips, “Evidence for Young Lunar Volcanism,” NASA Science News, Oct. 13, 2014, URL: http://science.nasa.gov/science-news/science-at-nasa/2014/13oct_moonvolcano/
60) S. E. Braden, J. D. Stopar, M. S. Robinson, S. J. Lawrence, C. H. van der Bogert, H. Hiesinger, “Evidence for basaltic volcanism on the Moon within the past 100 million years,” Nature Geoscience, Oct. 12,2014, doi:10.1038/ngeo2252
61) Nancy N. Jones, “NASA LRO's Moon As Art Collection Is Revealed,” June 18, 2014, URL: http://www.nasa.gov/content/goddard/nasa-lro-s-moon-as-art-collection-is-revealed/
62) “Sunrise View of Tycho Crater's Peak,” NASA, June 30, 2011, URL: http://www.nasa.gov/mission_pages/LRO/news/lro-tycho.html
63) Elizabeth Zubritsky, “NASA Missions Let Scientists See Moon’s Dancing Tide From Orbit,” NASA/GSFC, May 29, 2014, URL: http://www.nasa.gov/content/goddard/nasa-missions-let-scientists-see-moon-s-dancing-tide-from-orbit/
64) Dwayne Brown, Nancy Neal-Jones, “NASA Releases First Interactive Mosaic of Lunar North Pole,” NASA Release 14-079, March 18, 2014, URL: http://www.nasa.gov/press/2014/march/nasa-releases-first-interactive-mosaic-of-lunar-north-pole/#.UylfjM52H5o
65) Nancy Neal-Jones, “NASA's LRO Snaps a Picture of NASA's LADEE Spacecraft,” NASA, Jan. 29, 2014, URL: http://www.nasa.gov/content/goddard/nasas-lro-snaps-a-picture-of-nasas-ladee-spacecraft/#.Uu8whPvnNeM
66) Marc Robinson, “Close Encounter,” Arizona State University, Jan. 29, 2014, URL: [web source no longer available]
67) “NASA Instrument Determines Hazards of Deep-Space Radiation,” NASA News, Nov. 18, 2013, URL: http://www.nasa.gov/content/goddard/nasa-instrument-determines-hazards-of-deep-space-radiation/#.UpLcQCfgy9w
68) Nathan Schwadron,Chris Bancroft, Peter Bloser, Jason Legere, James Ryan, Sonya Smith, Harlan Spence, Joe Mazur, Cary Zeitlin, “Dose spectra from energetic particles and neutrons,” Space Weather, Vol. 11, Issue 10, Oct. 2013, pp. 547-556, doi:10.1002/swe.20095
69) “LROC Coordinates of Robotic Spacecraft 2013 Update,” NASA, Sept. 25, 2013, URL: http://www.nasa.gov/content/lroc-coordinates-of-robotic-spacecraft-2013-update/#.UoTs_Cfgy9w
70) “NASA's LRO: Four Years in Orbit,” NASA, June 18, 2013, URL: http://www.nasa.gov/mission_pages/LRO/news/4th-anniv.html
71) Nancy Neal-Jones, Elizabeth Zubritsky, “NASA Beams Mona Lisa to Lunar Reconnaissance Orbiter at the Moon,” NASA, Jan. 17, 2013, URL: http://www.nasa.gov/mission_pages/LRO/news/mona-lisa.html
72) Richard R. Vondrak, “Introduction to special section on Results of the Lunar Reconnaissance Orbiter Mission,” Journal of Geophysical Research, Vol. 17, Issue E12, Dec. 15, 2012, E00H01, doi:10.1029/2012JE004298, URL: http://onlinelibrary.wiley.com/doi/10.1029/2012JE004298/pdf
73) Nancy Neal-Jones , Bill Steigerwald, “NASA's LRO Sees GRAIL's Explosive Farewell,” NASA, March 19, 2013, URL: http://www.nasa.gov/mission_pages/LRO/news/grail-results.html
74) Bill Steigerwald, Nancy Neil Jones, “Lunar Reconnaissance Orbiter Spectrometer Detects Helium in Moon's Atmosphere,” NASA, Aug. 15, 2012, URL: http://www.nasa.gov/mission_pages/LRO/news/helium-detected.html
75) Richard Vondrak, John Keller, Gordon Chin, Noah Petro, Jim Garvin, James Rice, “Lunar Reconnaissance Orbiter: Status, Recent Science Results, and Plans for the Extended Science Mission,” Lunar Science Forum, NASA/ARC, Moffett Field, CA, July 17-19, 2012, URL: http://lunarscience.nasa.gov/wp-content/uploads/2012/08/06_LROforLSF_7-121.pdf
76) Tony Phillips, “Evidence mounts for ice in Shackleton Crater,” NASA, June 21, 2012, URL: http://science.nasa.gov/science-news/science-at-nasa/2012/20jun_shackleton/
77) “Researchers Estimate Ice Content of Crater at Moon's South Pole,” Science Daily, June 20, 2012, URL: http://www.sciencedaily.com/releases/2012/06/120620141159.htm?utm_source=feedburner&utm_medium=feed&utm_campaign=Feed%3A+sciencedaily+%28ScienceDaily%3A+Latest+Science+News%29
78) Bill Steigerwald, “Researchers Estimate Ice Content of Crater at Moon's South Pole,” NASA, June 20, 2012, URL: http://www.nasa.gov/mission_pages/LRO/news/crater-ice.html
79) Jennifer Chu, MIT, “Researchers find evidence of ice content at the moon’s south pole,” MIT News, June 20, 2012, URL: http://web.mit.edu/newsoffice/2012/shackletons-crater-0620.html#
80) Maria T. Zuber, James W. Head, David E. Smith, Gregory A. Neumann, Erwan Mazarico, Mark H. Torrence, Oded Aharonson, Alexander R. Tye, Caleb I. Fassett, Margaret A. Rosenburg, H. Jay Melosh, “Constraints on the volatile distribution within Shackleton crater at the lunar south pole," Nature, Vol. 486 , June 21, 2012, pp. 378-381, DOI: 10.1038/nature11216, URL: http://www.nature.com/nature/journal/v486/n7403/full/nature11216.html
81) “NASA Spacecraft Reveals Recent Geological Activity on the Moon,” NASA, Feb. 20, 2012, URL: http://www.nasa.gov/mission_pages/LRO/news/lunar-graben.html
82) “Moon images show crust pulling apart,” ASU (Arizona State University), Feb. 20, 2012, URL: https://asunews.asu.edu/20120220_lunartectonics
83) Nancy Neal Jones, “Two New NASA LRO Videos: See Moon's Evolution, Take a Tour,” NASA, March 14, 2012, URL: http://www.nasa.gov/mission_pages/LRO/news/vid-tour.html
84) “LRO Camera Team Releases High Resolution Global Topographic Map of Moon,” NASA, Nov. 16, 2011, URL: http://www.nasa.gov/mission_pages/LRO/news/lro-topo.html
85) Lunar Topography - As Never Seen Before!,” ASU, Nov. 16, 2011, URL: http://lroc.sese.asu.edu/news/?archives/484-Lunar-Topography--As-Never-Seen-Before!.html
86) “Flying over the three-dimensional Moon,” DLR, Nov. 24, 2011, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-2065/year-2011/
87) Mark Robinson, “Skimming the Moon,” URL: http://lroc.sese.asu.edu/news/?archives/454-Skimming-the-Moon.html
88) “NASA Spacecraft Images Offer Sharper Views of Apollo Landing Sites,” NASA, Sept. 6, 2011, URL: http://www.nasa.gov/mission_pages/LRO/news/apollo-sites.html
89) “NASA Details Achievements Of Lunar Spacecraft ,” Release: 11-192, URL: http://www.nasa.gov/home/hqnews/2011/jun/HQ_11-192_LRO_Success.html
90) Information provided by Ben Bussey of JHU/APL, Laurel, MD, USA
91) “NASA Lunar Reconnaissance Orbiter Delivers Treasure Trove of Data,” NASA, March 15, 2011, URL: http://www.nasa.gov/mission_pages/LRO/news/terabytes.html
92) David F. Everett, “Engineering a Successful Mission: Lessons from the Lunar Reconnaissance Orbiter,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011,
93) “LRO Instrument Status Update - 01.11.11,” NASA, URL: http://www.nasa.gov/mission_pages/LRO/main/index.html
94) “NASA's LRO Creating Unprecedented Topographic Map of Moon,” NASA, Dec. 17, 2010, URL: http://www.nasa.gov/mission_pages/LRO/news/lola-topo-map.html
95) “A Cool Look at a Lunar Crater,” July 1, 2010, URL: http://www.nasa.gov/mission_pages/Mini-RF/multimedia/featured_image_ice_rich_crater.html
96) http://www.nasa.gov/mission_pages/Mini-RF/main/index.html
97) “NASA Radar Finds Ice Deposits at Moon's North Pole,” NASA, March 2, 2010, URL: http://www.nasa.gov/mission_pages/Mini-RF/multimedia/feature_ice_like_deposits.html
98) “Ten Cool Things Seen in the First Year of LRO,” NASA, June 23, 2010, URL: http://www.nasa.gov/mission_pages/LRO/news/first-year.html
99) “NASA's LRO Team Helps Track Laser Signals to Russian Rover Mirror,” NASA, April 26, 2010, URL: http://www.nasa.gov/mission_pages/LRO/news/lro-20100426.html
100) “LRO Team Helps Track Laser Signals To Russian Rover Mirror,” Space Travel, April 27, 2010, URL: http://www.space-travel.com/reports/LRO_Team_Helps_Track_Laser_Signals_To_Russian_Rover_Mirror_999.html
101) “NASA Unveils Latest Results From Lunar Mission, Helps Prepare for Next Stage of Scientific Discovery,” Dec. 15, 2009, URL: http://www.nasa.gov/mission_pages/LRO/news/agu-results-2009.html
102) Richard Vondrak, John Keller , Gordon Chin, James Garvin. “Lunar Reconnaissance Orbiter (LRO): Observations for Lunar Exploration and Science,” Space Science Review (2010) 150: 7–22, DOI 10.1007/s11214-010-9631-5
103) Grey Hautaluoma, “NASA Lunar Satellite Begins Detailed Mapping of Moon's South Pole,” Sept. 17, 2009, URL: http://www.nasa.gov/home/hqnews/2009/sep/HQ_09-215_LRO_First_Light.html
104) http://www.lpi.usra.edu/meetings/leag2009/presentations/Day-2%20AM/09-00_Vondrak.pdf
105) Nancy Atkinson, “First Science Data from LRO; 'Tantalizing' Hints of Water,” Universe Today, Sept. 18, 2009, URL: http://www.universetoday.com/2009/09/18/first-science-data-from-lro-tantalizing-hints-of-water/
106) http://www.nasa.gov/mission_pages/LRO/multimedia/lroimages/lroc_20090903_apollo12.html
107) “LRO Sends First Lunar Images To Earth,” Moon Daily, July 3, 2009, URL: http://www.moondaily.com/reports/LRO_Sends_First_Lunar_Images_To_Earth_999.html
108) “LRO Enters Orbit Around the Moon,” NASA, June 23, 2009, URL:http://www.nasa.gov/mission_pages/LRO/main/index.html
109) J. Keller, “LRO Instrument Suite and Measurements,” AIAA ATS (Annual Technical Symposium), May 19, 2006, Houston, TX, USA
110) http://crater.sr.unh.edu/
111) Jastin Kasper, “Cosmic Ray Telescope for the Effects of Radiation (CRaTER) Instrument Requirements,” URL: http://snebulos.mit.edu/projects/crater/docs/presentations/CRaTER-SRR-Aug05.pdf
112) Harlan E. Spence and the CraTER Science Team, “ Cosmic Ray Telescope for the Effects of Radiation (C Ra TER),” Space Weather Week, Boulder, CO, April 28, 2006, URL: http://www.scribd.com/doc/18849006/LRO-CRaTER-Cosmic-Ray-Telescope-for-the-Effects-of-Radiation
113) Jamie A. Anderson, Youssef M. Charara, Lawrence W. Townsend, “LET Estimate Improvements for the CRaTER Instrument using HETC-HEDS,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
114) Jamie A. Anderson, Youssef M. Charara, Lawrence W. Townsend, “Linear Energy Transfer Estimates for the CRaTER Instrument on LRO,” Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, March 6-13, 2010
115) Bruno M. Jau, “The Diviner Lunar Radiometer a Mechanical Description,” Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, March 6-13, 2010
116) The Lyman-Alpha Mapping Project (LAMP), URL: http://www.boulder.swri.edu/lamp/LAMPfactsheet.pdf
117) I. G. Mitrofanov, R. D. Starr, and the LEND/LRO Instrument Team, “Lunar Exploration Neutron Detector Evaluation of Potential LCROSS Impact Sites,” LCROSS Site Selection Workshop, Oct. 16, 2006, NASA/ARC, Moffett Field, CA, USA, URL: http://www.lpi.usra.edu/meetings/lcross2006/pdf/9003.pdf
118) I. Mitrofanov, “LRO System Requirements Review -Lunar Exploration Neutron Detector (LEND), Requirements & Implementation,” URL: http://snebulos.mit.edu/projects/crater/locker/GSFC/SRR-DryRun/10%20-%20LEND4.ppt
119) http://lunar.gsfc.nasa.gov/lend.html
120) A. B. Sanin, W. Boynton, L. Evans, K. Harshman, A. Kozyrev, M. Litvak, A. Malakhov, G. Milikh, I. Mitrofanov, M. Mokrousov, R. Sagdeev, V. Shevchenko, V. Schvetsov, R. Starr, J. Trombka, A. Vostrukhin, “Lunar Exploration Neutron Detector (LEND) for NASA Lunar Reconnaissance Orbiter,” 38th Lunar and Planetary Science Conference, Houston, TX, USA, March 12-16, 2007, URL: http://www.lpi.usra.edu/meetings/lpsc2007/pdf/1648.pdf
121) W. V. Boynton, G. F. Droege, I. G. Mitrofanov, T. P. McClanahan, A. B. Sanin, M. L. Litvak, M. Schaffner, G. Chin, L. G. Evans, J. B. Garvin, K. Harshman, A. Malakhov, G. Milikh, R. Sagdeev, R. Starr, “High spatial resolution studies of epithermal neutron emission from the lunar poles: Constraints on hydrogen mobility,” Journal of Geophysical Research, Vol. 17, Issue E12, Dec. 15, 2012, E00H33, doi:10.1029/2011JE003979, URL: http://onlinelibrary.wiley.com/doi/10.1029/2011JE003979/pdf
122) David Smith, Maria Zuber, Mark Torrence, Jan McGarry, Michael Pearlman, “Laser Ranging to the Lunar Reconnaissance Orbiter (LRO),” 15th International Laser Ranging Workshop, Canberra, Australia, Oct 16-20, 2006, URL: http://lrolr.gsfc.nasa.gov/docs/LRO-LR-McGarry-Canberra2006_v4.pdf
123) Melanie N. Ott, Robert Switzer, Richard Chuska, Frank LaRocca, William Joe Thomes, Lance W. Day, Shawn Macmurphy, “The Optical Fiber Array Bundle Assemblies for the NASA Lunar Reconnaissance Orbiter; Evaluation Lessons Learned for Flight Implementation from the NASA Electronic Parts and Packaging Program,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
124) Jan McGarry, Tom Zagwodzki, Ron Zellar, Carey Noll, Greg Neumann, Mark Torrence, Julie Horvath, Bart Clarke, Randy Ricklefs, Mike Pearlman, “Laser Ranging to the Lunar Reconnaissance Orbiter (LRO): a Global Network Effort,” 2008, URL: http://www.astro.amu.edu.pl/ILRS_Workshop_2008/presentations/2_tue/sess3/5_McGarry.ppt
125) H. Riris, J. Cavanaugh,. X. Sun, P. Liiva, M. Rodriguez, G. Neuman, “The Lunar Orbiter Laser Altimeter (LOLA) on NASA's Lunar Reconnaissance Orbiter (LRO) Mission,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/ICSO/Papers/Session%203a/FCXNL-10A02-1985954-1-Riris_icso_paper_LOLA.pdf
126) Jan McGarry, Christopher Clarke, Julie Horvath, Dandan Mao, Mark Torrence, “The First ILRS Laser Transponder Mission: Laser Ranging to NASA’s Lunar Reconnaissance Orbiter,” Proceedings of the 17th International Workshop on Laser Ranging, Bad Kötzting, Germany, May 16-20, 2011, URL: http://cddis.gsfc.nasa.gov/lw17/docs/papers/session13/01c-McGarry_LRO-LR_Kotzting2011_paper_FINAL.pdf
127) Jan McGarry, Mark Torrence, Dandan Mao, David Skillman, Christopher Clarke, July Horvath, David E. Smith, Maria Zuber, Xiaoli Sun, Gregory Neumann, “The First ILRS Laser Transponder Mission: Laser Ranging to NASA's Lunar Reconnaissance Orbiter (LRO),” Proceedings of the 17th International Workshop on Laser Ranging, Bad Kötzting, Germany, May 16-20, 2011, URL: http://cddis.gsfc.nasa.gov/lw17/docs/presentations/session13/01c-McGarry_LRO-LR_Results.pdf
128) S. Bauer, J. Oberst, H. Hussmann, P. Gläser, U. Schreiber, D. Mao, G. A. Neumann, E. Mazarico, M. H. Torrence, J. F. McGarry, D. E. Smith, M. T. Zuber, “Reduction and analysis of one-way laser ranging data from ILRS ground stations to LRO,” Proceedings of TTC 2013, 6th International Workshop on Tracking Telemetry and Command Systems for Space Applications, Darmstadt, Germany, Sept. 10-13, 2013
129) http://lroc.sese.asu.edu/
130) http://www.msss.com/lro/lroc/index.html
131) M. S. Robinson, E. M. Eliason, H. Hiesinger, B. L. Jolliff, A. S. McEwen, M. C. Malin, M. A. Ravine, D. Roberts, P. C. Thomas, E. P. Turtle, “LROC - Lunar Reconnaissance Orbiter Camera,” Lunar and Planetary Science XXXVI, 2006, URL: http://www.lpi.usra.edu/meetings/lpsc2005/pdf/1576.pdf
132) http://lroc.sese.asu.edu/news/index.php?/archives/341-Nearside-Spectacular!.html
133) Stewart Nozette, Paul Spudis, Ben Bussey, Robert Jensen, Keith Raney, Helene Winters, Christopher L. Lichtenberg,·William Marinelli, Jason Crusan, Michele Gates, Mark Robinson, “The Lunar Reconnaissance Orbiter Miniature Radio Frequency (Mini-RF) Technology Demonstration,” Space Science Review, Vol. 150, 2010, pp. 285-302, DOI 10.1007/s11214-009-9607-5, URL: http://www.spudislunarresources.com/Bibliography/p/97.pdf
134) http://lunar.gsfc.nasa.gov/mini-rf.html
135) R. K. Raney, “Comments on Hybrid-Polarity SAR Architecture,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
136) R. K. Raney, “Hybrid-Polarity SAR Architecture,” Proceedings of IGARSS ( IEEE International and Geoscience Remote Sensing Symposium), Denver, CO, July 31-Aug. 4, 2006
137) R. K. Raney, ”On dual-polarized SARs and the Stokes parameters,” Proceedings of EUSAR 2006. Dresden, Germany, May 16-18, 2006.
138) Ben Bussey, Paul Spudis, Stu Nozette, Chris Lichtenberg, Keith Raney, Bill Marinelli, Helene Winters, “Mini-RF: Imaging Radars for Exploring the Lunar Poles,” ILEWG 9th International Conference on Exploration and Utilization of the Moon, ICEUM9/ILC2007, Oct. 22-26, 2007, Sorrento, Italy, URL: http://sci.esa.int/science-e/www/object/doc.cfm?fobjectid=41683
139) Paul Spudis, Stewart Nozette, Ben Bussey, Keith Raney, Helene Winters, Christopher L. Lichtenberg, William Marinelli, Jason C. Crusan, Michele M. Gates, “Mini-SAR: an imaging radar experiment for the Chandrayaan-1 mission to the Moon,” Current Science, Vol. 96, No 4, Feb. 25, 2009, pp. 533-539, URL: http://www.spudislunarresources.com/Bibliography/p/94.pdf
140) David B. LaVallee, Joseph P. Skura, D. Benjamin J. Bussey, Helene L. Winters, “Miniature Radar Operations Challenges,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
141) J. L. Heldmann, “Slamming Rockets into the Moon: An Overview of the LCROSS Mission at NASA Ames!,” June 27, 2006, URL: http://www.docstoc.com/docs/53070205/Slamming-Rockets-into-the-Moon-An-Overview-of-the
142) http://lcross.arc.nasa.gov/
143) “New NASA Ames Spacecraft to Look for Ice at One of Moon's Poles,” Aug. 14, 2006, URL:http://www.nasa.gov/centers/ames/multimedia/images/2006/lunarorbiter.html
144) Daniel Andrews, “LCROSS: A High-Return, Small Satellite Mission,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
145) Paul D. Tompkins, Rusty Hunt, Matt D’Ortenzio, James Strong, Ken Galal, John L. Bresina, Darin Foreman, Robert Barber, Mark Shirley, James Munger, Eric Drucker, “Flight Operations for the LCROSS Lunar Impactor Mission,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-1986
146) Paul D. Tompkins, Rusty Hunt, John L. Bresina, Ken Galal, Mark Shirley, James Munger, Scott Sawyer, “Flight Team Development in Support of LCROSS – a Class D Mission,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2223
147) Haley Stephenson, Matthew Kohut, “Moon Mission on a Shoestring,” NASA ASK Magazine, Issue 39, Summer 2010, URL: http://www.nasa.gov/pdf/469427main_ASK_39s_moon.pdf
148) Daniel Lunar Impactor - Lessons Learned from a Small Satellite Mission,” Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-VI-6
149) “LCROSS Impact Data Indicates Water on Moon,” NASA, Nov. 13, 2009, URL: http://www.nasa.gov/mission_pages/LCROSS/main/prelim_water_results.html
150) Grey Hautaluoma/Ashley Edwards, Jonas Dino, “NASA Spacecraft Impacts Lunar Crater in Search for Water Ice,” NASA, Oct. 9, 2009, URL: http://www.nasa.gov/centers/ames/news/releases/2009/09-131AR.html
151) “NASA blasts moon with rocket in search for water,” Moon Daily, Oct. 9, 2009, URL: http://www.moondaily.com/reports/NASA_blasts_moon_with_rocket_in_search_for_water_999.html
152) “NASA Selects Target Crater for Lunar Impact,” Sept. 9, 2009, URL: http://science.nasa.gov/headlines/y2009/11sep_lcrosstarget.htm?list1291671
153) Nancy Atkinson, “LCROSS (and the Moon) Up Close,” October 8, 2009, URL: http://www.universetoday.com/2009/10/08/lcross-and-the-moon-up-close/
154) “NASA Moon Impactor Completes Lunar Maneuver,” URL: http://www.nasa.gov/mission_pages/LCROSS/main/index.html
155) Stephen F. Currier, Roger N. Clason, Marco M. Midon, Bruce R. Schupler and Michael L. Anderson, “NASA Ground Network Support of the Lunar Reconnaissance Orbiter,” 2006, URL: http://csse.usc.edu/gsaw/gsaw2007/s6/schupler.pdf
156) Stephen F. Currier, Roger N. Clason, “NASA Ground Network Support of the Lunar Reconnaissance Orbiter,” 9th International Conference on Space Operations “SpaceOps 2006, Rome, Italy, June 19, 23, 2006, paper: AIAA 2006-5819
157) “NASA unveils new high volume antenna network,” NASA/GSFC, Nov. 13, 2007, URL: http://www.moontoday.net/news/viewpr.html?pid=24017
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).