Lunar Flashlight
Non-EO
NASA
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
Lunar Flashlight Mission
The Lunar Flashlight mission was selected by NASA’s Advanced Exploration Systems Division as a secondary payload to fly aboard the SLS (Space Launch System’s) Artemis-1 mission (formerly EM-1). Lunar Flashlight, led by a team from the Jet Propulsion Laboratory and Marshall Space Flight Center, will map the lunar south pole for volatiles and demonstrate several technological firsts, including being the first CubeSat to reach the moon, the first planetary CubeSat mission to use green propulsion, and the first mission to use lasers to look for water ice. 1)
Locating ice deposits in the moon’s permanently shadowed craters addresses one of NASA’s Strategic Knowledge Gaps (SKGs) to detect composition, quantity, distribution, form of water/H species and other volatiles associated with lunar cold traps. The scientific and economic importance of lunar volatiles extends far beyond the question “is there water on the moon?” Volatile materials including water come from sources central to NASA’s strategic plans, including comets, asteroids, interplanetary dust particles, interstellar molecular clouds, solar wind, and lunar volcanic and radiogenic gases. The volatile inventory, distribution, and state (bound or free, evenly distributed or blocky, on the surface or at depth, etc.) are crucial for understanding how these molecules interact with the lunar surface, and for utilization potential.
Previous investigations have revealed evidence for ice at the lunar poles, but have been unable to determine its form or quantify its abundance with a high degree of certainty. For example, the LAMP (Lyman-α Mapping Project) instrument onboard the Lunar Reconnaissance Orbiter (LRO) detected the presence of ~1 wt% to 10 wt% of water within most South polar cold traps, but these data could not uniquely distinguish water ice from adsorbed H2O or OH molecules. 2)
The Lunar Flashlight mission spacecraft maneuvers to its lunar polar orbit and uses its near infrared lasers to shine light into the shaded polar regions, while the on-board spectrometer measures surface reflection and composition. The Lunar Flashlight 6U spacecraft has heritage elements from predecessor systems including JPL’s INSPIRE and JPL’s experience with imaging spectrometers, including the Moon Mineralogy Mapper (M3). The mission will demonstrate a path where 6U CubeSats could, at dramatically lower cost than previously thought possible, explore, locate and estimate size and composition of ice deposits on the moon. It is a game-changing capability for expanded human exploration, planetary science, heliophysics, and other relevant instrument applications.
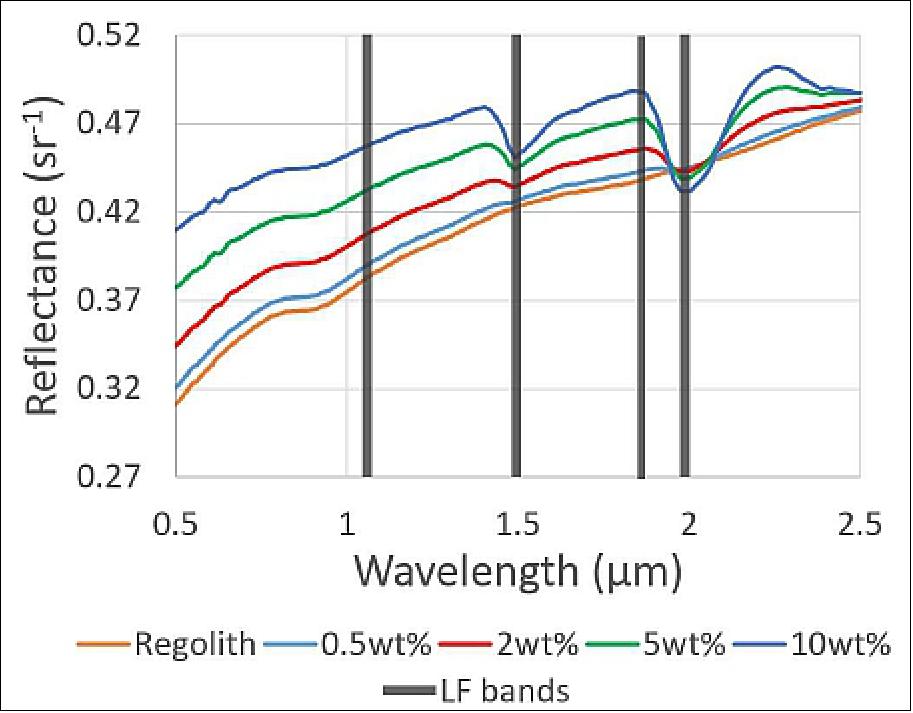
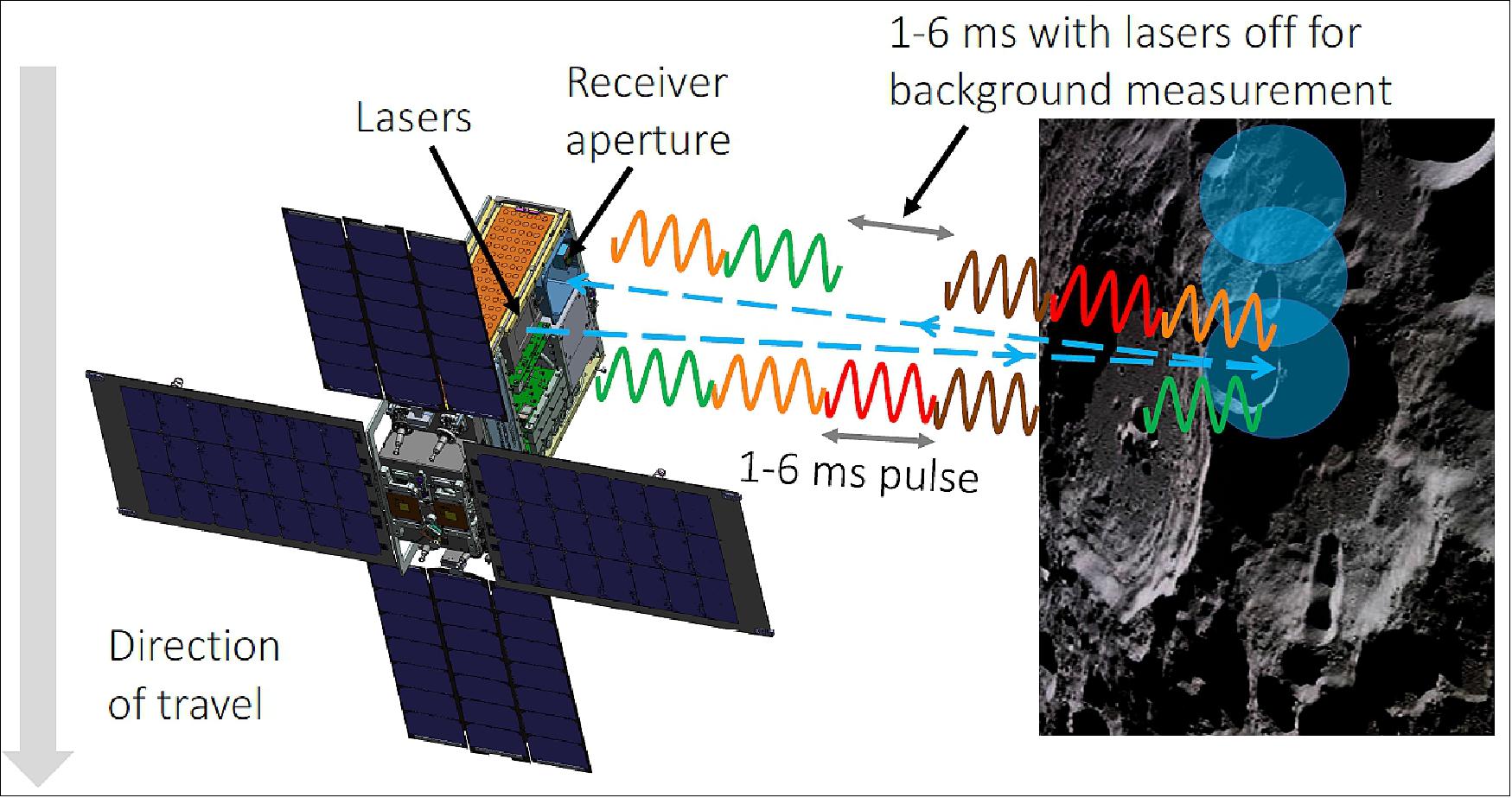
The LF (Lunar Flashlight) instrument is a multi-band reflectometer based on an optical receiver aligned with four lasers, each emitting in a different wavelength in the shortwave infrared (SWIR) spectral region. As illustrated in Figure 4, these wavelengths correspond to peak absorption for water ice (1.495 and 1.99 µm) and nearby continuum (1.064 and 1.850 µm). The 1.064 µm band has been chosen to enable comparison with data acquired by the LOLA (Lunar Orbiter Laser Altimeter). The lasers fire sequentially in a repeating sequence for 1 ms each, followed by 1 ms with all lasers off. The optical receiver collects and measures a portion of the light reflected from the lunar surface. The measurement with all lasers off quantifies the background, which is the sum of detector dark current, receiver thermal emission incident on the Science detector, and stray solar illumination reflected from the lunar surface towards the instrument. The instrument background is subtracted in post-processing from the measured signals. 3)
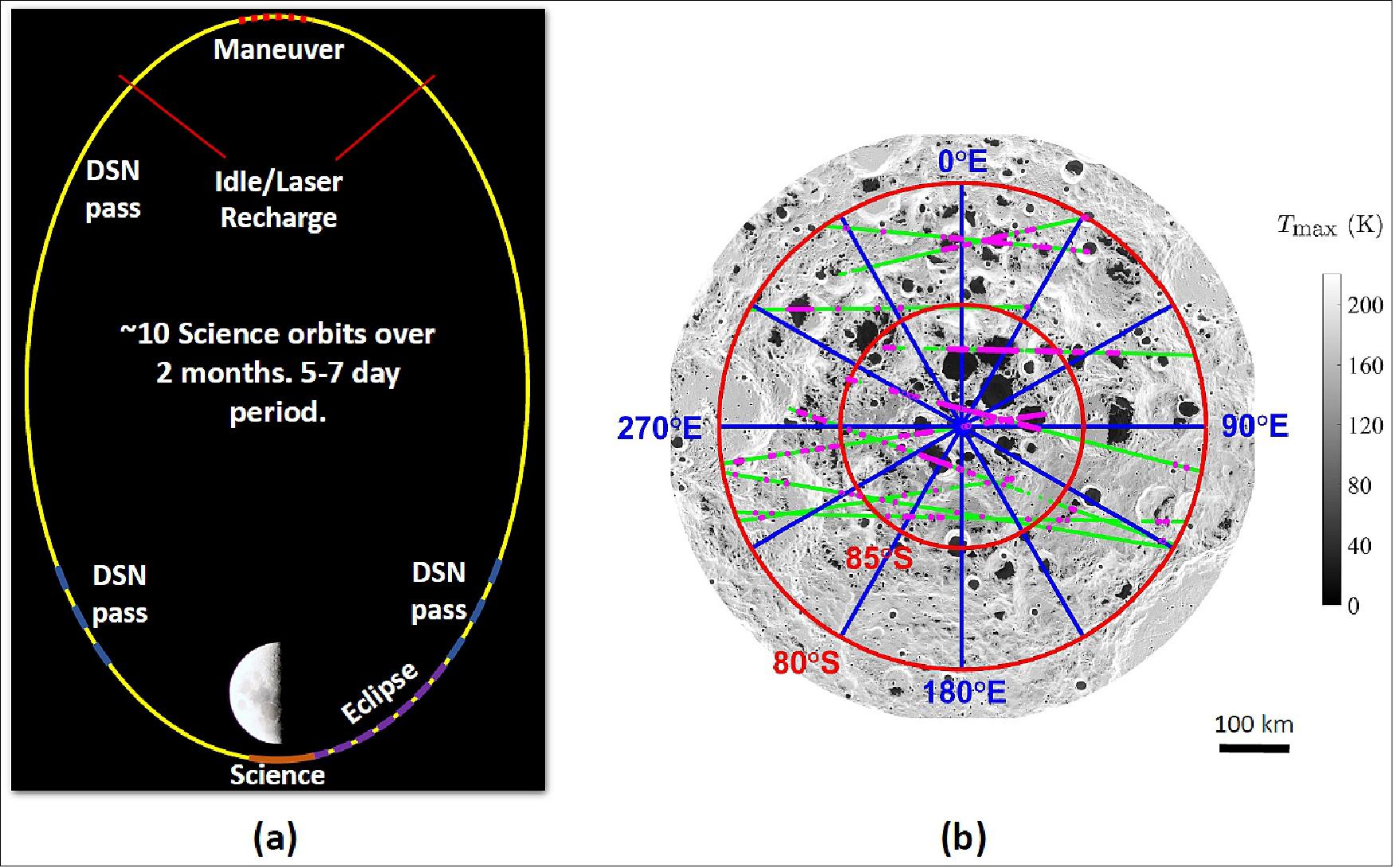
In order to increase the SNR (Signal to Noise Ratio), the measurements are averaged for each of the spectral bands over the time in which the laser-illuminated FOV (Field of View) moves a distance on the lunar surface corresponding to the desired mapping resolution of lunar water ice. We derive the reflectance of the lunar surface at each of the four wavelengths and absorption band depths are then analyzed to quantify the weight percent of water ice (wt%) in the illuminated FOV. The science goal is to identify locations where water ice may be present at concentrations ≥ 0.5 wt% (0.5 weight %) on the lunar surface with a mapping resolution of 1-2 km (10 km for the minimum success criteria). During the planned 2-month primary mission, LF will pulse the lasers for several minutes from each of 11 near-rectilinear orbits, at altitudes of 12.6-52.4 km within 10º latitude of the lunar south pole.
Spacecraft
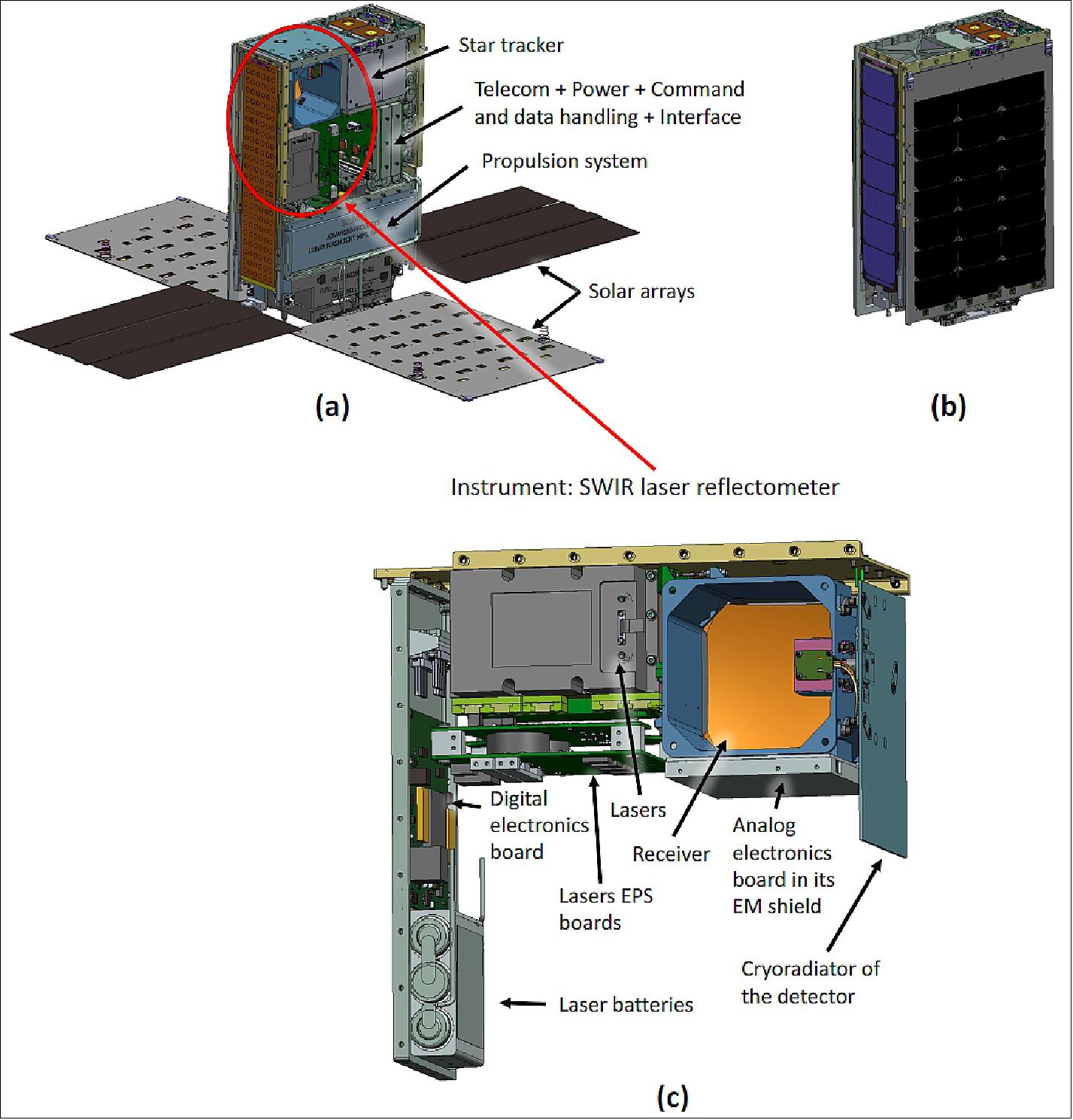
The LF CubeSat will inherit the compact form factor of the 6U CubeSat canisterized satellite dispenser standard with some slight modifications to accommodate a maximum mass of 14 kg for a form factor of 116.2 x 239.4 x 366 mm (Tyvak Nano-Satellite Systems Inc. dispenser specifications). As is common with CubeSats, LF will employ commercial off-the-shelf (COTS) components that have been screened for use in space applications, and will have limited fault redundancy. The LF spacecraft propulsion system is a novel technology developed by VACCO Industries, Inc. and will use “green” monopropellant. 5)
The transfer of the raw measurements and the remote control of the spacecraft will be achieved by a miniaturized radio called “Iris”, 6) which has recently been used by Mars Cube One (MarCO) CubeSats launched to Mars in May 2018. After the ejection of the LF spacecraft from the dispenser, four solar panels deployed in the configuration shown in Figure 2(a) will supply the electrical power to charge the spacecraft batteries. Figure 2(b) illustrates the stowed configuration of the LF spacecraft. 7)
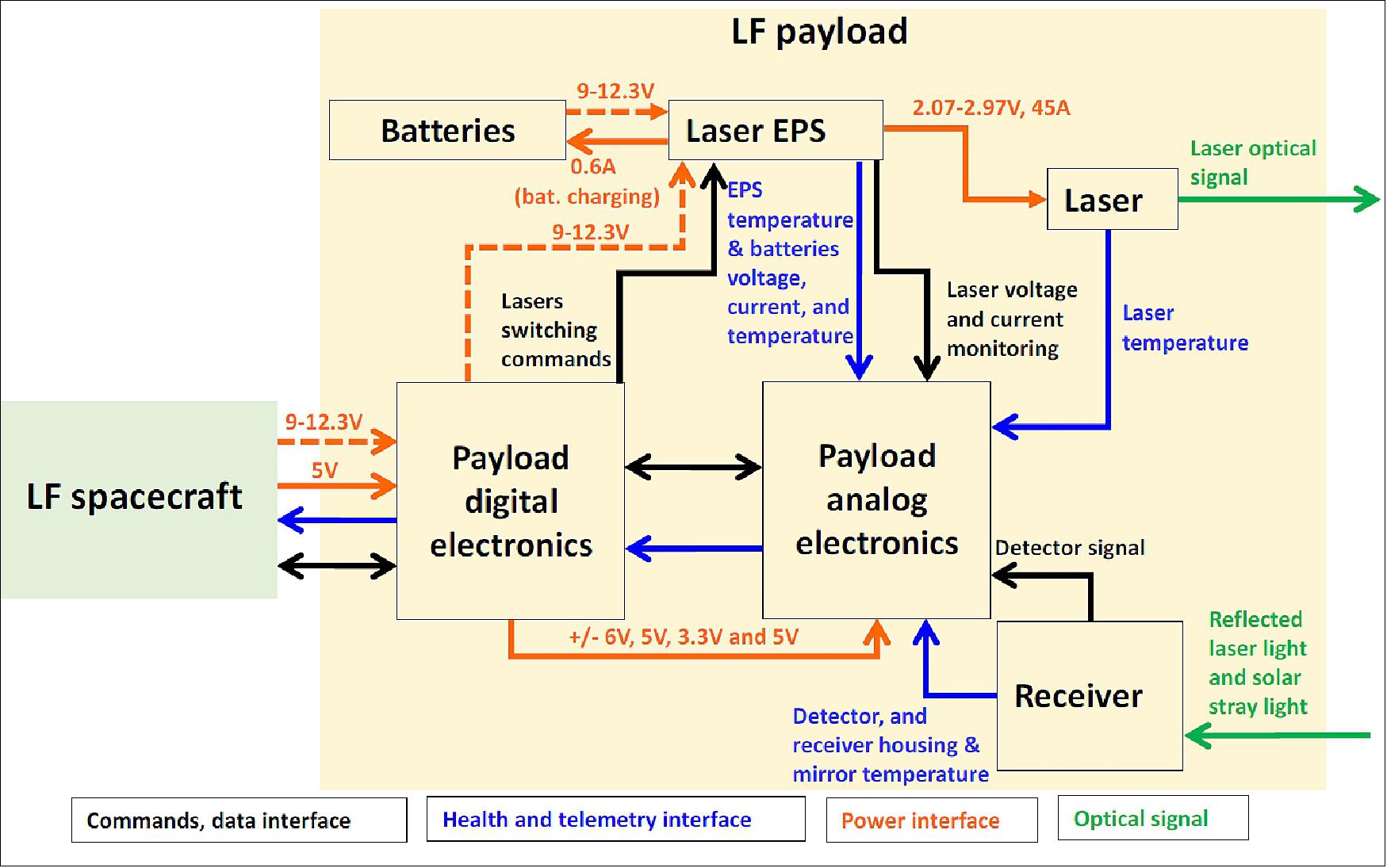
The LF instrument, depicted in Figure 2(c), occupies 2U of the 6U spacecraft. It is a multi-band reflectometer based on an optical receiver that is aligned with four high-power diode lasers (procured from Coherent DILAS Inc.), each emitting in a different wavelength in the SWIR spectral region. These wavelengths, which are obtained by customized epitaxy, correspond to peak absorption for water ice (1.495 µm and 1.99 µm) and the nearby continuum (1.064 µm and 1.85 µm). The diode lasers are pumped at 45 A with voltage ranging from ~2.07 V to ~2.97 V (~2.97 V at 1.064 µm, ~2.07 V at 1.495 µm, and ~2.9 V at 1.85 µm and 1.99 µm), which is supplied by the laser electrical power system (EPS) board and laser Lithium ion (Li-ion) batteries. The laser optical powers (peak powers) at 45-A pump current are as follows: ~73 W at 1.064 µm, ~30 W at 1.495 µm, and ~15 W at 1.85 µm and 1.99 µm.
In order to dissipate the thermal power from the lasers, the laser module is thermally coupled to a phase-change material (PCM). More than 99% of the emitted optical energy by each of the lasers is encircled within a full angle of 17 mrad. The receiver is based on an off-axis bare aluminum paraboloidal mirror that collects the incoming light onto a single-pixel indium gallium arsenide (InGaAs) detector with a 2 mm diameter, and has been designed to obtain a uniform 20 mrad field of view (FOV). In order to cool the InGaAs detector down to 208 K during science data passes, the instrument uses a cryoradiator that is thermally coupled to the detector and stabilized by aPID (Proportional Integral Derivative) regulator controlling a heater mounted on the cryoradiator. An analog electronic board reads and amplifies the detector output current. This signal is then digitized at 100 kHz by the digital electronics board.
Development Status
• April 27, 2020: As astronauts explore the Moon during the Artemis program, they may need to make use of the resources that already exist on the lunar surface. Take water, for instance: Because it's a heavy and therefore expensive resource to launch from Earth, our future explorers might have to seek out ice to mine. Once excavated, it can be melted and purified for drinking and used for rocket fuel. But how much water is there on the Moon, and where might we find it? 8)
- This is where NASA's Lunar Flashlight comes in. About the size of a briefcase, the small satellite - also known as a CubeSat - aims to detect naturally occurring surface ice believed to be at the bottom of craters on the Moon that have never seen sunlight.
- "Although we have a pretty good idea there's ice inside the coldest and darkest craters on the Moon, previous measurements have been a little bit ambiguous," said Barbara Cohen, principal investigator of the mission at NASA's Goddard Space Flight Center in Greenbelt, Maryland. "Scientifically, that's fine, but if we're planning on sending astronauts there to dig up the ice and drink it, we have to be sure it exists."
- Managed by NASA's Jet Propulsion Laboratory in Southern California, the spacecraft is a technology demonstration: It will seek to achieve several technological firsts, including being the first mission to look for water ice using lasers. It will also be the first planetary spacecraft to use a "green" propellant, a new kind of fuel that is safer to transport and store than the commonly used spacecraft propellant hydrazine.
- "A technology demonstration mission like Lunar Flashlight, which is lower cost and fills a specific gap in our knowledge, can help us better prepare for an extended NASA presence on the Moon as well as test key technologies that may be used in future missions," said John Baker, Lunar Flashlight project manager at JPL.
Peering into the Shadows
- Over the course of two months, Lunar Flashlight will swoop low over the Moon's South Pole to shine its lasers into permanently shadowed regions and probe for surface ice. Found near the North and South Poles, these dark craters are thought to be "cold traps" that accumulate molecules of different ices, including water ice. The molecules may have come from comet and asteroid material impacting the lunar surface and from solar wind interactions with the lunar soil.
- "The Sun moves around the crater horizon but never actually shines into the crater," said Cohen, whose team includes scientists at the University of California, Los Angeles, John Hopkins Applied Physics Laboratory and the University of Colorado. "Because these craters are so cold, these molecules never receive enough energy to escape, so they become trapped and accumulate over billions of years."
- Lunar Flashlight's four-laser reflectometer will use near-infrared wavelengths that are readily absorbed by water to identify any accumulations of ice on the surface. Should the lasers hit bare rock as they shine into the South Pole's permanently shadowed regions, their light will reflect back to the spacecraft, signaling a lack of ice. But if the light is absorbed, it would mean these dark pockets do indeed contain ice. The greater the absorption, the more widespread ice may be at the surface.
- While the CubeSat can provide information only about the presence of ice on the surface, and not below it, Lunar Flashlight seeks to fill a critical gap in our understanding of how much water ice these regions possess. "We will also be able to compare the Lunar Flashlight data with the great data that we already have from other Moon-orbiting missions to see if there are correlations in signatures of water ice, thereby giving us a global view of surface ice distribution," added Cohen.
- The mission is detailed in a new paper published in the April 2020 issue of IEEE Aerospace and Electronic Systems Magazine. 9)
- Lunar Flashlight is funded by the Small Spacecraft Technology program within NASA's Space Technology Mission Directorate. The program is based at NASA's Ames Research Center in California's Silicon Valley. It will be one of 13 secondary payloads aboard the Artemis I mission, the first integrated flight test of NASA's Deep Space Exploration Systems, including the Orion spacecraft and Space Launch System (SLS) rocket launching from the newly upgraded Exploration Ground Systems at Kennedy Space Center in Florida.
- Under the Artemis program, astronauts and robots will explore more of the Moon than ever before. Robotic missions begin with commercial lunar deliveries in 2021, humans return in 2024, and the agency will establish sustainable lunar exploration by the end of the decade. We will use what we learn on the Moon to prepare to send astronauts to Mars.
Launch: The Lunar Flashlight 6U CubeSat will fly as a secondary payload on the NASA Artemis-1 mission, originally known as the Orion EM-1 (Exploration Mission) using the SLS (Space Launch System), with a planned launch in 2021.
Mission Complement
Measurement Goals: The measurement goal of Lunar Flashlight is to identify locations where water ice is present at the surface of the Moon as a frost. To accomplish this goal, the spacecraft will measure surface reflectance band ratios with a spatial resolution of 10 km or better with multiple measurements in permanently shadowed and occasionally sunlit regions poleward of 80º S latitude. The payload is designed to measure the surface abundance of water ice with concentrations of 5 wt% or less, down to as little as 0.5 wt%. This percentage of water ice concentration (0.5 wt%) corresponds to the minimum quantity that has been defined as useful for in situ resource utilization. 10)
As depicted in Figure 4, two of the four wavelengths (~1.495 µm and ~1.990 µm) correspond to overtone vibrational absorption features for water ice, while the two other wavelengths (~1.064 µm and ~1.850 µm) correspond to nearby continua. The measurements will ratio the reflectance value in the absorption features to the continuum in order to determine the water ice abundance.
Mission design: LF will be placed in near-rectilinear orbit around the Moon for two months. The instrument will target PSRs (Permanently Shadowed Regions) from altitudes of 12.6 to 52.4 km within 10º of latitude from the lunar South Pole from 10 of the orbits; see Figure 4a. Figure 4b shows the achievable PSR coverage map based on the available spacecraft propulsion resources.
Principle of Operation: The lasers fire sequentially with a pulse width of 1 to 6 ms each (6 ms nominally), followed by a pause of 1 to 6 ms (6 ms nominally) with all of the lasers off to measure the background. The flight electronics have been designed to be able to change the laser pulse width and the firing sequence. The goal is to be able to take more than one dark frame measurement per laser firing sequence during science data paths in case of unexpected background fluctuations. The optical receiver measures a portion of the light reflected from the lunar surface within its solid angle. The background consists of the sum of the detector dark current, the detected thermal emission of the receiver, and the detected solar illumination reflected from the lunar surface to the receiver inside and outside of its FOV. Theoretically, there will not be any dark current, because the detector is operated at zero bias. However, dark current can be present in the case of a small parasitic bias introduced by the electronics reading the detector. The instrument background is subtracted in post-processing from the measured signals. In order to improve the signal-to-noise ratio (SNR), for each spectral band, the measurements are averaged over the time in which the laser-illuminated area on the lunar surface moves a distance corresponding to the desired mapping resolution of water ice (10 km or less).
As a result, the Lunar Flashlight will actually measure the average water ice concentration over distances a maximum of 10 km long. The laser spot speed on the Moon surface during science data paths varies from 2.22 to 2.33 km/s. Considering an average laser spot speed of 2.28 km/s, a mapping resolution of 1 km corresponds to 1/2.28=0.44 second of integration time, and a mapping resolution of 10 km corresponds to 10/2.28=4.4 seconds of integration time. From the measurements of the reflected laser light in each of the four spectral bands, the continuum/absorption reflectance band ratios are then calculated and analyzed to derive the water ice content within the illuminated area by the lasers. During the planned two-month primary mission, LF will pulse the lasers for a maximum time of 2 to 3 minutes per orbit (due to the thermal dissipation constraints of the instrument) toward the PSRs and occasionally sunlit regions (when in eclipse during the measurements) of the lunar South Pole (Figure 5). The instrument operation concept is depicted in Figure 6.
Note that LF chose a design using temporal multiplexing and a common receiver for all of the spectral channels instead of a simultaneous acquisition on four spectrally filtered detectors. Given the very demanding mass and volume resources of a CubeSat mission, this payload design is the result of a challenging system engineering effort that maximizes the overall instrument SNR while allowing a simple receiver optical design.
Receiver Optomechanical Design
Receiver Optical Design: This subsection describes the final optical design of the LF receiver completed by Photon Engineering Inc. using the FRED software package, with updated information compared to that given in Ref. 12). Given the volume and mass constraints of a CubeSat, the receiver design is constrained to be as simple as possible. The optical system consists in a 70 x 70 mm off-axis aluminum paraboloidal mirror with a single-pixel detector located at the focal position of the mirror. The LF receiver’s InGaAs detector is not sensitive to the total ionizing dose (TID), but it is mainly sensitive to displacement damages. No detector radiation test was performed. However, the LF mission will only last approximately eight months (six months to go to the Moon, and two months of operation), and the probability of having any issue related to displacement damages is insignificant. The receiver occupies 1U of volume (approximately 10 x 10 x 10 cm) out of the 2U of volume allocated to the instrument. We define the receiver FOV as the incident angle range within which the detection efficiency is maximal and sufficiently uniform (<3.7% non-uniformity within 100% of the FOV; <1.3% non-uniformity within 95% of the FOV). The divergence profiles of the laser beams drive the requirements for the receiver FOV. In the LF laser module design, greater than 99% of the emitted energy is encircled within a full-angle of 17 mrad. The measured far-field normalized laser divergence profiles are depicted in Figure 7.
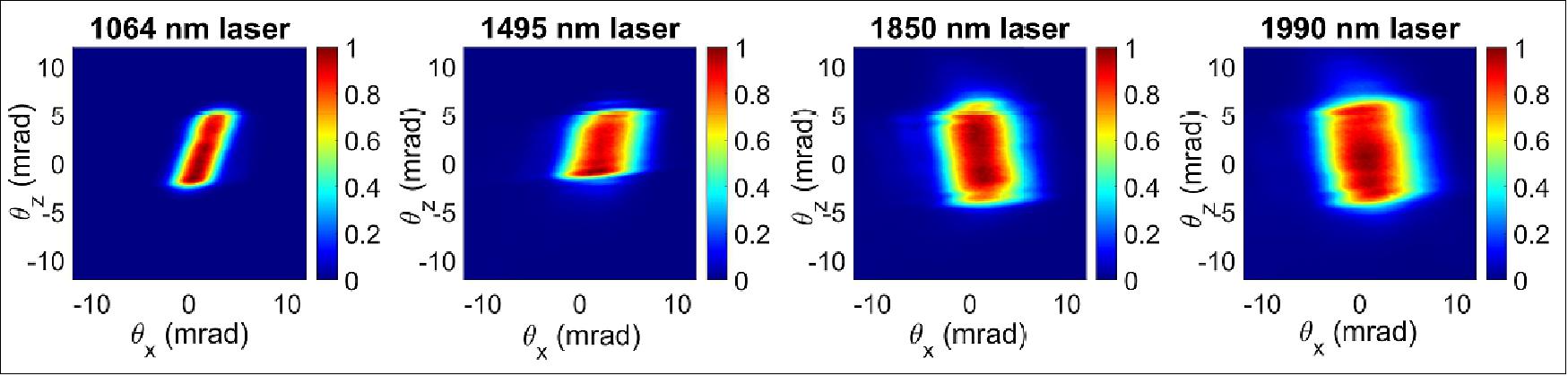
The receiver FOV has to be large enough to cover the divergence profile of the lasers, and some margins are necessary to accommodate the alignment budget between the lasers and the receiver. However, the FOV cannot be too large in order to minimize the detected solar stray light that would saturate the detector electronics (Ref. 11). We designed the receiver to provide a uniform FOV of 20 mrad. Since the focal ratio of the LF receiver is very fast (f <100 mm due to volume constraints), the optical system suffers from large aberrations.
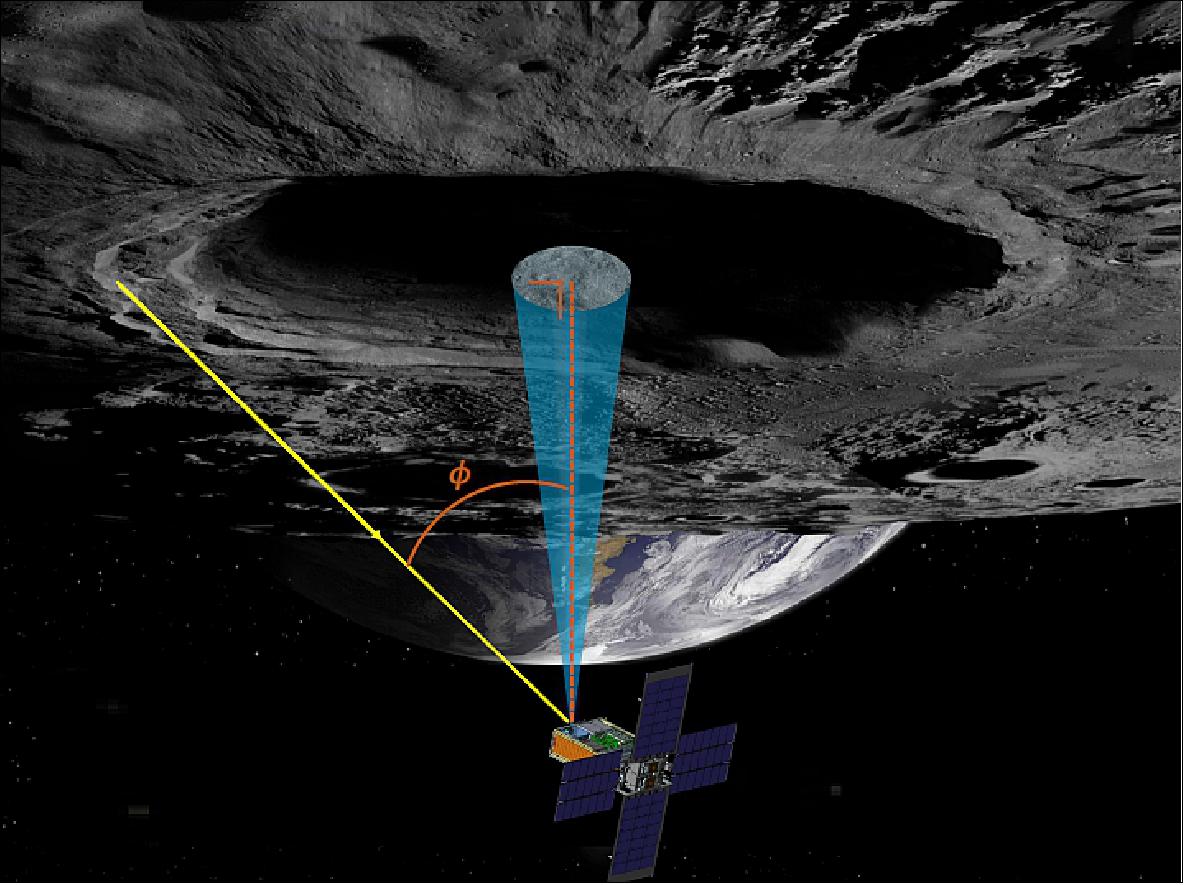
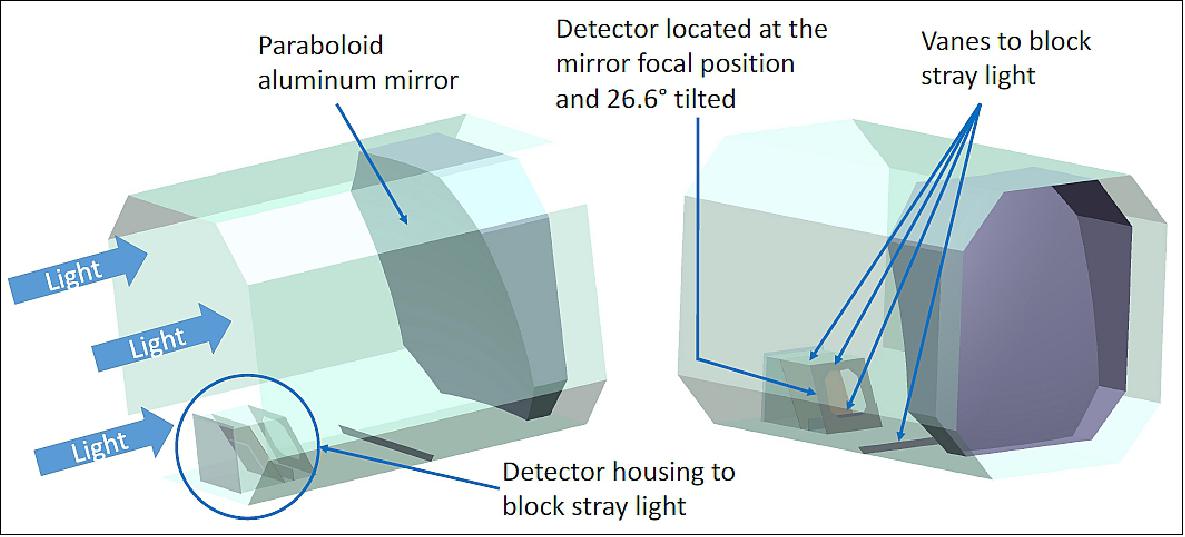
The optical design has also been optimized for solar stray light rejection. Solar stray light is the sunlight reflected from the lunar surface toward the instrument and scattered onto the detector active area from outside the receiver FOV. Such a situation is depicted in Figure 7.
The stray light scattering model of the FRED software uses the Harvey–Shack surface scatter theory. 13) We performed the simulations considering all of the internal surfaces painted in black, with a mirror roughness set to 30 Å and a cleanliness level equal to CL600.
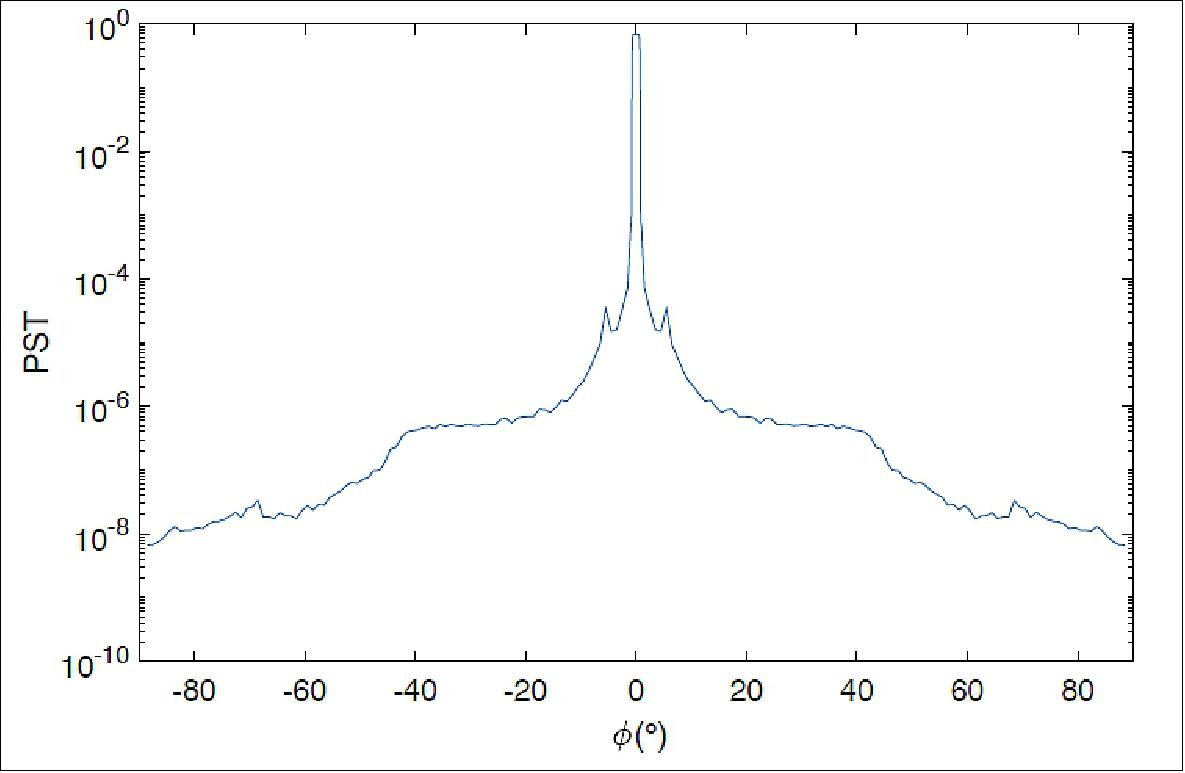
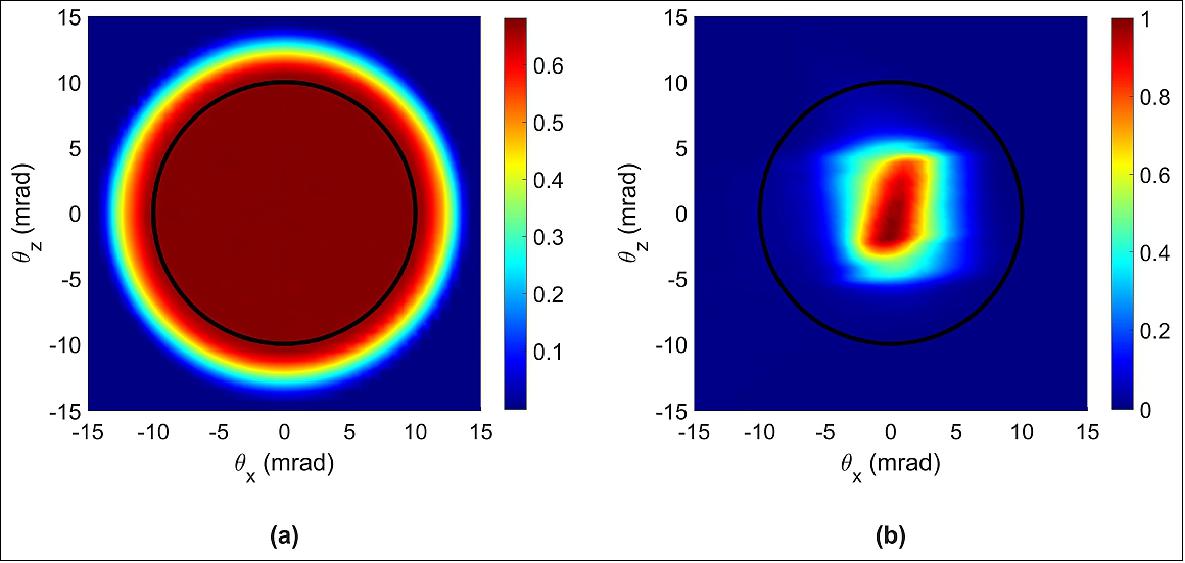
In order to estimate the LF science performance based on the predicted orbits and lunar surface illumination (Ref. 11), our model uses the receiver point source transmittance (PST) function calculated in FRED. The PST function represents the receiver detection efficiency as a function of the θx and θz incident field angles, where qx and qz are respectively the rotation angles around axis X and Z. The XZ plane is perpendicular to the receiver optical axis. We define the receiver detection efficiency as the fraction of the photon flux passing through the receiver aperture that reaches the detector active area. The optimal vane configuration obtained with FRED, which minimizes the PST function outside the receiver FOV, is depicted in Figure 9. Figure 10 shows the rotational average of the simulated PST function corresponding to the final receiver mechanical design. Figure 11 represents the two-dimensional (2D) PST function for small θx and θz incident angles to illustrate the receiver FOV, as well as the comparison of the uniform 20 mrad receiver FOV with the averaged laser beam divergence profiles. Table 1 lists the principal technical specifications of the receiver design.
Receiver dimensions | ~80 x 80 x 95 mm |
Receiver aperture | ~75 x 75 mm |
Mirror surface requirements | - 70 x 70 mm bare aluminum off-axis paraboloidal mirror, post-polished |
Science detector | - 2.4-m cutoff InGaAs Teledyne Judson with a 2-mm diameter detector in a C11 package, unbiased |
Temperature sensors | - Model: “DT-670” from Lake Shore Cryotronics, Inc. |
Responsivity requirements | - >0.47 A/W at 1064 nm |
Dark current requirement | <2 nA (detector dark current at a detector temperature of 208 K and detected thermal emission from the receiver at a temperature of 248 K for the mirror) |
Field of view requirement | 20 mrad with <3.7% non-uniformity within 100% of the FOV and <1.3% non-uniformity within 95% of the FOV |
Boresight alignment requirement | <1 mrad (this corresponds to a maximum laser signal loss <0.35% based on the measured laser divergence profiles |
Receiver Thermal and Mechanical Designs: The optical design defines only the dimensions and the relative positions of the front surface of the mirror, the detector, and the stray light control elements (receiver housing, baffles, vanes). The mechanical and thermal design defines all the remaining dimensions, materials, and processes to support the fabrication of the complete receiver. This subsection describes the final thermal and mechanical designs of the LF receiver created by Sierra Lobo Inc., with updated information compared to the ones given in Ref. 12).
The LF instrument assembly depicted in Figure 12 includes three subsystems: the laser module, the receiver module, and a part of the LF thermal subsystem. The laser module consists of multiple laser diodes, collimation lenses, and the related electrical and mechanical hardware contained in an enclosure with a copper heatsink, which is bolted to an aluminum-alloy chassis containing the PCM. The PCM module not only dissipates the thermal power emitted by the lasers during operation, but it also forms the mechanical structure to which the receiver module is attached.
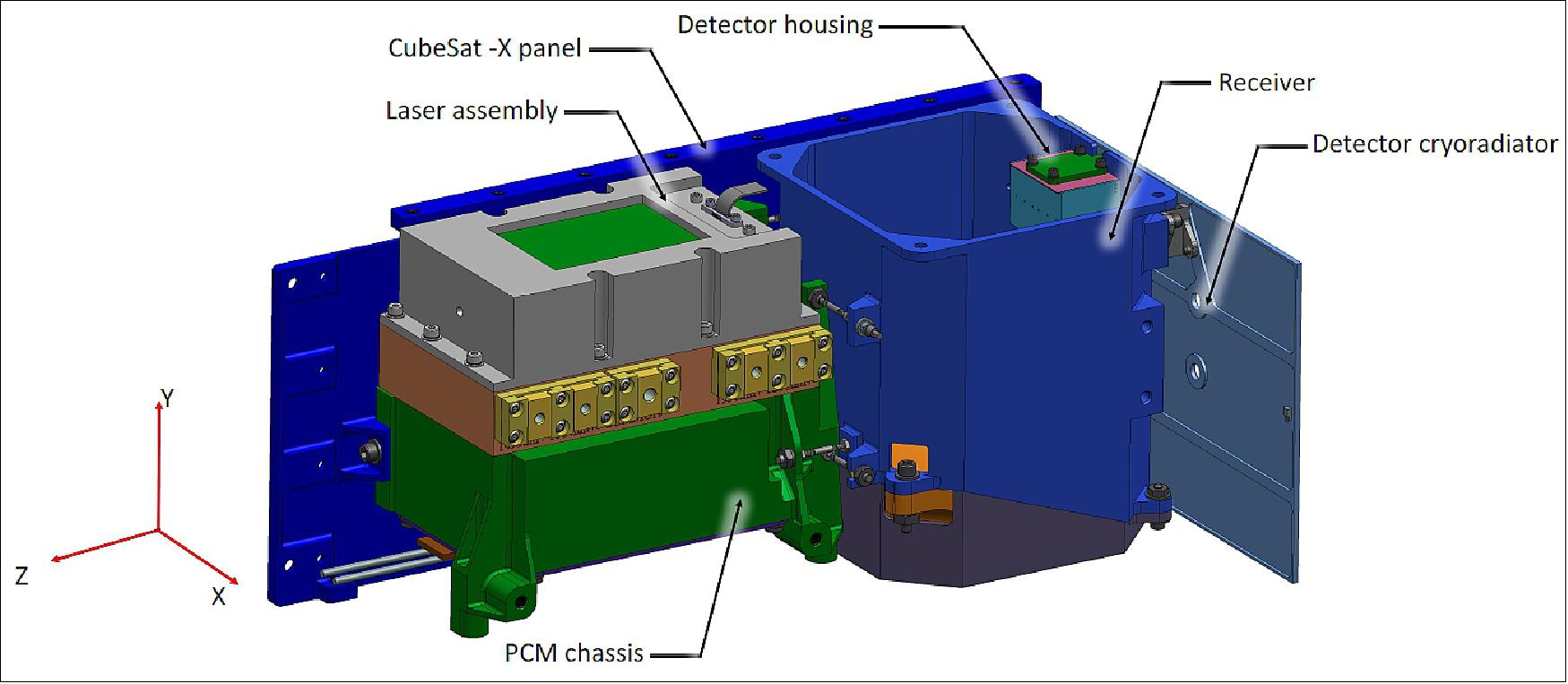
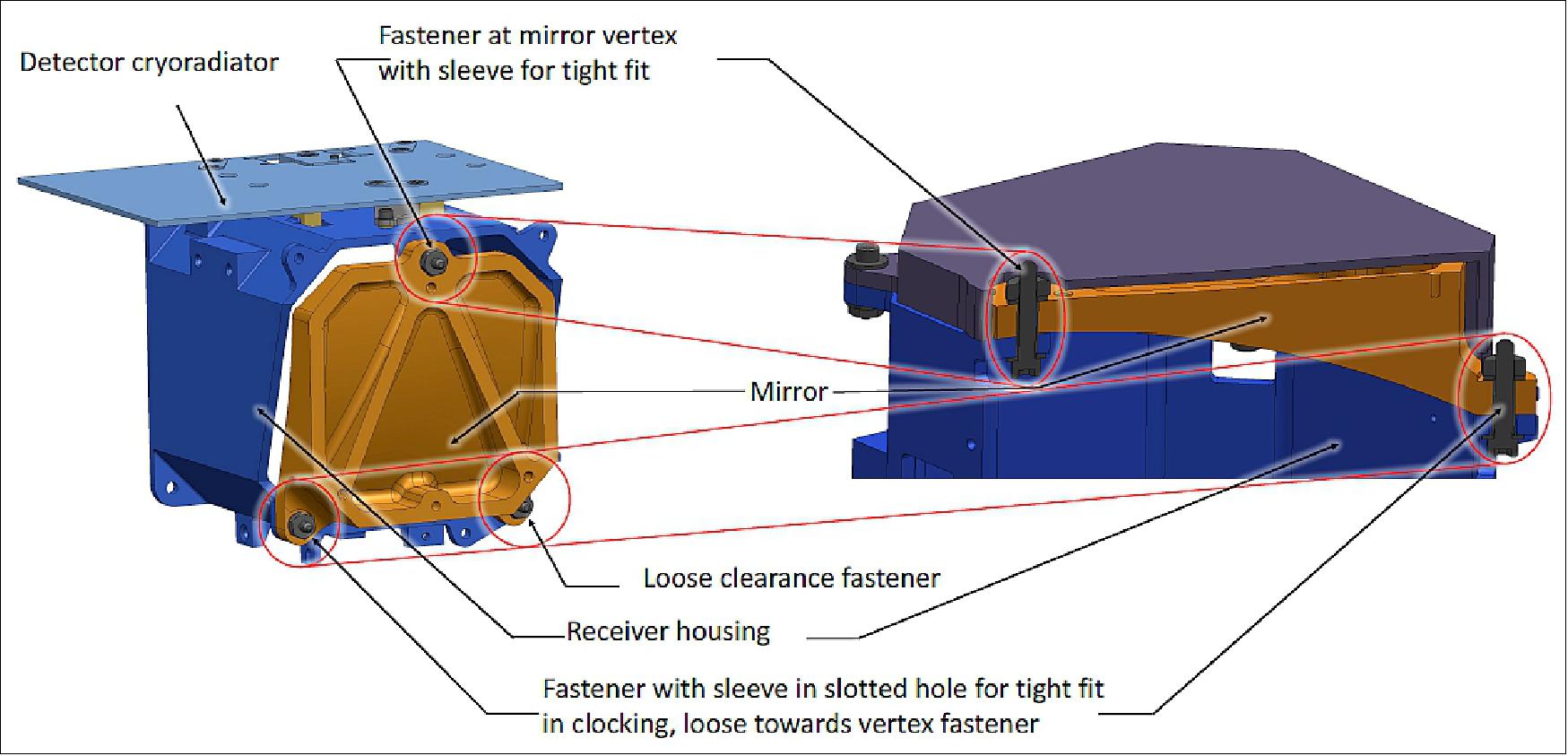
The receiver module comprises essentially four major components: an off-axis paraboloidal (OAP) mirror, the receiver housing, a detector subassembly, and a cryoradiator. The OAP is machined from rapidly solidified aluminum (RSA) alloy RSA-6061, using conventional machining for the mirror blank, single-point diamond turning (SPDT) to achieve the surface figure, and post-polishing to reduce surface scatter. Three integral mounting pads on the OAP are cut via SPDT in the same pass as the optical surface to provide a precision datum to the Al alloy 6061-T6 receiver housing. Similarly, the mounting feature that is used to define the axis of the OAP on the SPDT lathe is utilized as a mounting feature to the receiver housing.
This design paradigm provides the basis of a “snap-together” optomechanical system (Figure 13). The intent was to have the mating features placed in a final step using SPDT, although schedule constraints prevented this approach. Instead, the final mounting of the OAP to the conventionally machined housing used an epoxy bed of Stycast 2850FT to mitigate differences in flatness and coplanarity at the faying surface. The radial position of the OAP to the housing was controlled to high precision through a close-fitting sleeve between the aforementioned axial tooling feature on the OAP, and a similar feature on the housing. A secondary sleeve at one of the remaining mounting pads provides a clocking constraint to the housing with a radial slot. OAP to housing athermalization is achieved through use of similar materials. The external surfaces of the receiver housing are electroplated with gold to provide passive cooling.
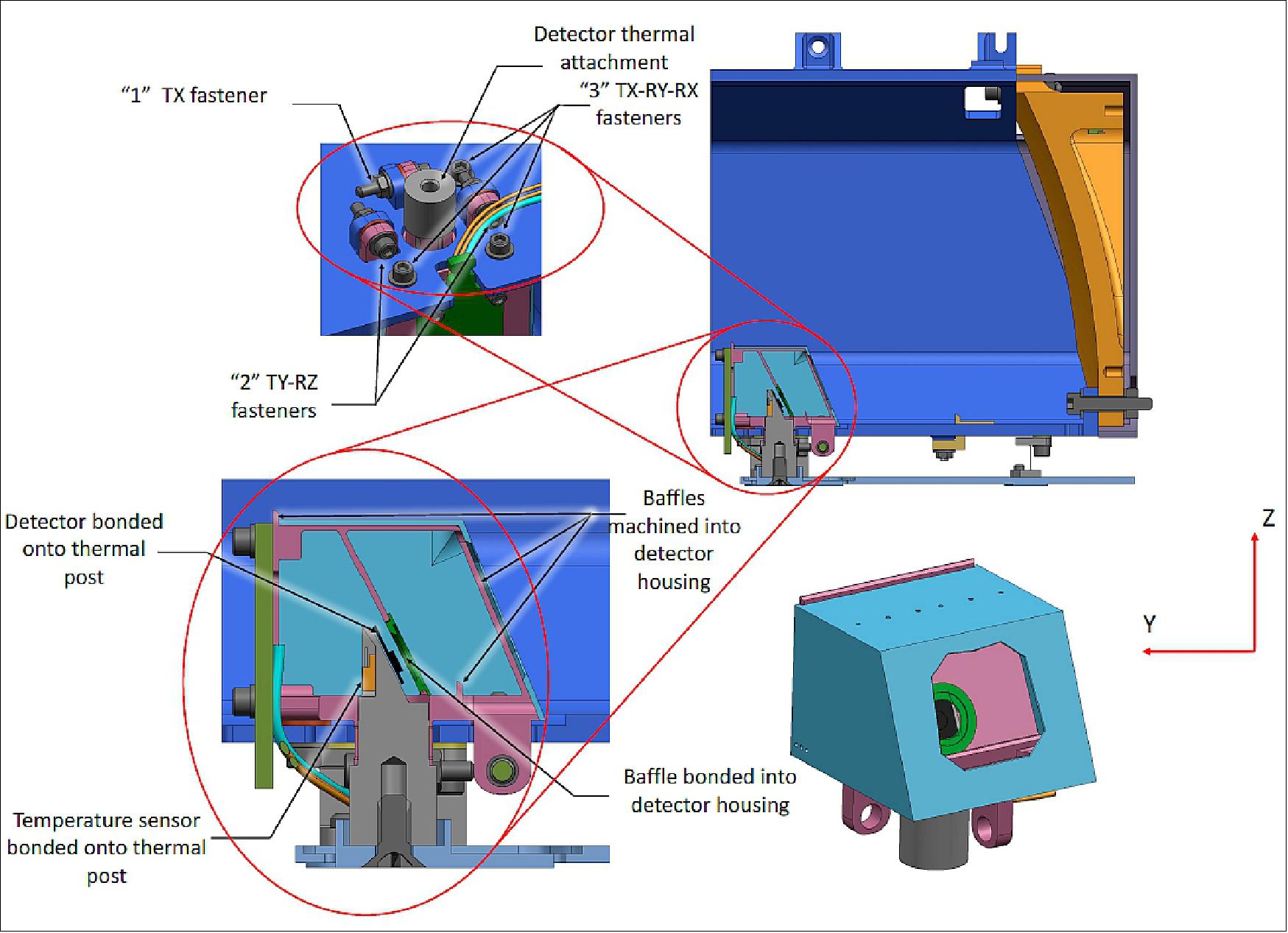
The third member of the receiver module, the detector subassembly, provides mechanical mounting for the InGaAs detector, stray light baffling, thermal isolation from the receiver housing, and thermal connection to the cryoradiator. Additionally, the electromechanical packaging of the detector and detector temperature sensor are provided by this subassembly. Materials for this subassembly were chosen to be of a similar coefficient of thermal expansion (CTE) to the ceramic detector package. The detector is bonded to a titanium–zirconium–molybdenum (TZM) alloy post. This provides the mechanical and thermal connection to the detector housing and cryoradiator, respectively. This post is, in turn, bonded to a titanium alloy detector housing. The detector housing has mounting features at its base for attachment to the receiver housing with conventional screw fasteners, and precision shims for positioning. They are arranged in a 3–2–1, semi-kinematic configuration with the mounting planes crossing at the intersection of the TZM detector post and the Al alloy receiver housing (Figure 14). This symmetry affords some degree of athermalization of the detector position through the interface between the receiver housing and detector subassembly CTEs.
The complex aperture shapes and edge profiles of the baffles resulting from the stray light analysis dictated a multiple-piece detector housing. The detector housing base has baffle features, and forms the optomechanical structure for the detector subassembly. It is machined, both conventionally and with wire electrical discharge machining (EDM) to achieve the necessary form and precision. A turned circular baffle with the prescribed internal diameter and edge profile is epoxy bonded into a mating feature in the housing base. Closeout of the detector subassembly is with a cover that has yet another baffle of the correct shape and edge profile using the same techniques as the detector housing base. All of the pieces are painted internally and externally with Aeroglaze Z-306 flat black paint.
The detector is cooled via the cryoradiator machined from Al alloy 6061-T6. It is affixed to the detector post with a single fastener with interface thermal conductivity augmented by wet-mounting with a conductive polymeric: either Stycast 2850FT or Nusil CV 2942. Thermal isolation between the radiator and the receiver housing is provided by three Ti alloy flexures arranged such that their complicate direction is pointed at the detector post. This allows the radiator to contract relative to the rest of the receiver module without affecting the alignment. The CTE of the Ti flexures is similar enough to the TZM detector post to avoid the excessive stress that is normal to the cryoradiator, although flexure cuts in the radiator provide additional compliance.
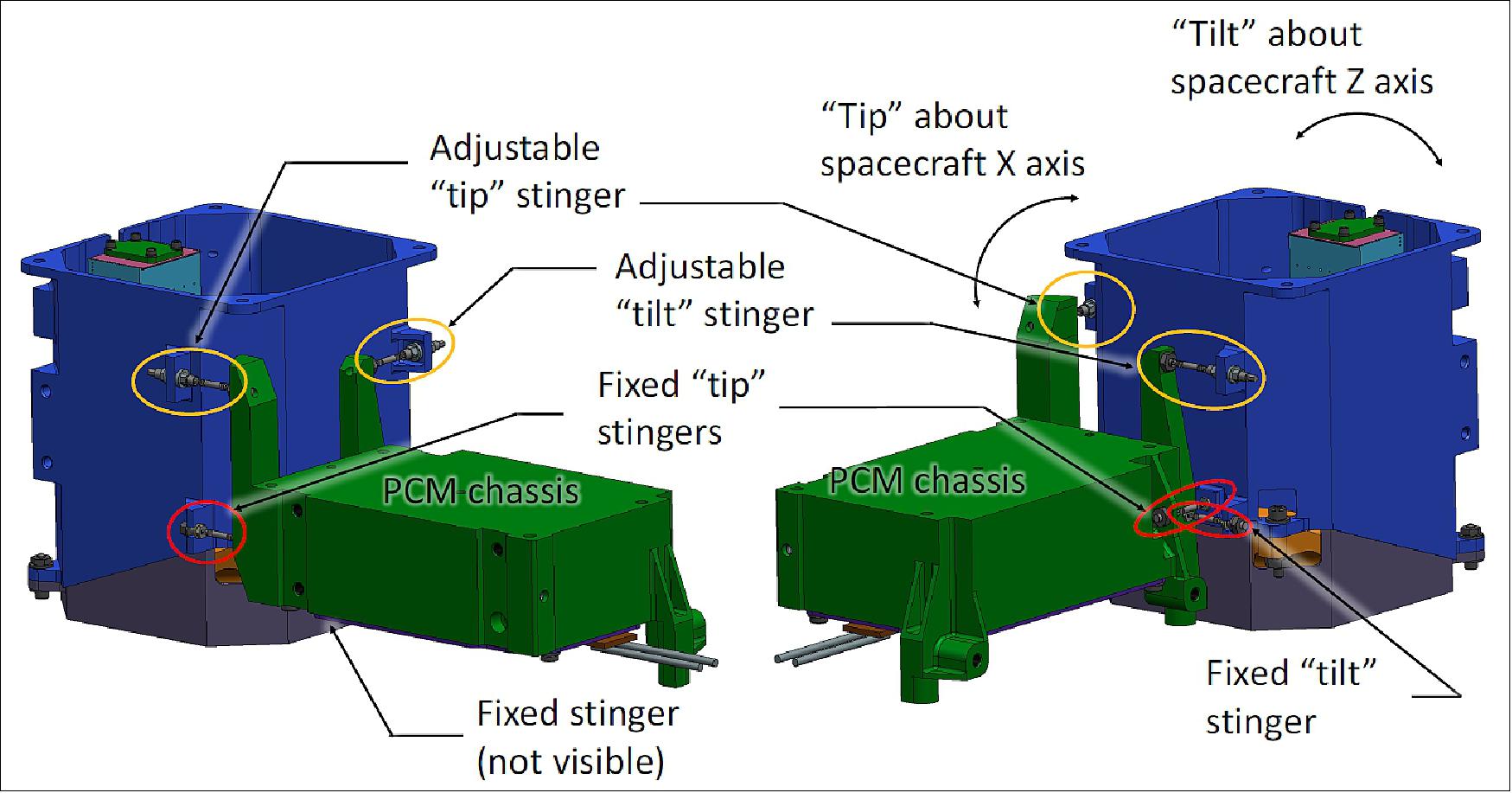
The receiver and laser modules are mechanically coupled using six titanium-alloy rod flexures (Figure 15). These “stingers” maintain boresight alignment while also providing thermal isolation between the laser and receiver. Coarse relative pointing adjustment is achieved by differential shimming between seats machined into the receiver housing, the PCM chassis, and the stingers. Fine tip–tilt adjustment is achieved through two of the six stingers, which are fitted with fine screw threads. These are mated to opposing conical seats in the receiver housing with opposing nuts with ogive faces. When micron-level resolution metrology is actively employed during alignment, 0.05-mrad pointing adjustments are achievable.
Receiver Characterization
Flight Hardware Inspection after Delivery to the Jet Propulsion Laboratory. Figure 16 presents the flight LF reflectometer optomechanical assembly. The assembly mass was 1.57 kg, including a ~20 cm ground support equipment (GSE) coaxial cable with its Bayonet Neill–Concelman (BNC) connector. Measurements of the receiver dimensions are presented in Figure 17.
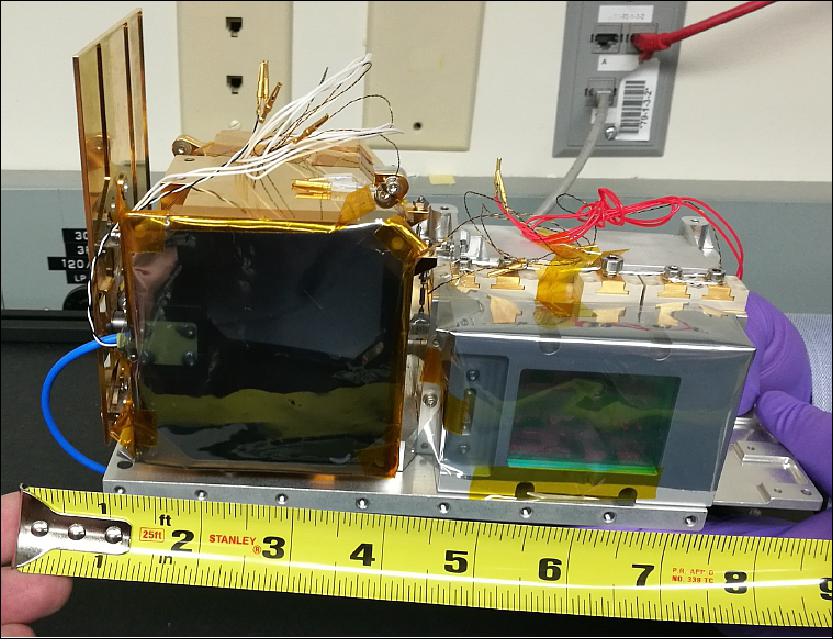
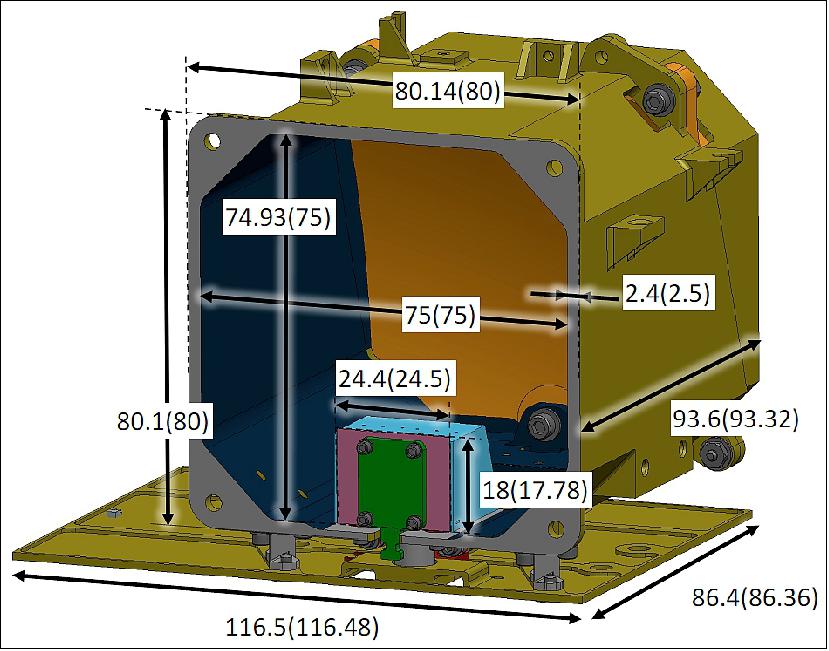
The mirror roughness has been measured to 36 Å on average (15 to 20 Å for most of the surface, except for a band of ~5 mm that hugs the edges of the mirror, which is ~40 Å), and the mirror figure to1.74 λ at 632.8 nm. This is close enough to the baseline design (Table 1) to not significantly affect the receiver performance. Indeed, the total integrated scattering (TIS) is roughly proportional to the square of the RMS surface roughness for smooth surfaces (when the RMS surface roughness << λ). 14)
Thus, increasing the RMS surface from 30 Å to 36 Å would roughly increase the TIS (Total Integrated Scattering) by 44%. A higher TIS means more scattered solar stray light (which increases the shot noise on the measurements) and more scattered laser light (which decreases the detected laser signal). The shot noise related to the detected solar stray light is insignificant in the instrument SNR budget for most of the observations of PSRs and regions in eclipse (Ref. 11), so the slight increase of the detected solar stray light due to the RMS surface roughness on the instrument SNR can be disregarded. The maximum TIS of the mirror at a surface roughness of 30 Å, corresponding to a wavelength of 1 µm and an incident angle of 0º (we will never experience such an incident angle for the laser light, so the analysis is conservative), is equal to 0.14% according to the database used by FRED; 44% of 0.14% is equal to 0.06%. This very conservative analysis means that increasing the RMS surface from 30 Å to 36 Å would decrease the instrument SNR by less than 0.06%, which is insignificant.
During the integration of the receiver, the internal surfaces of the detector housing shell were left unpainted (Figure 14, lower right, turquoise part) with Aeroglaze Z-306 black. These surfaces consist of unpolished titanium with BR127 primer applied. FRED simulations have shown that these unpainted surfaces do not lead to any significant degradation of the receiver stray light rejection performance.
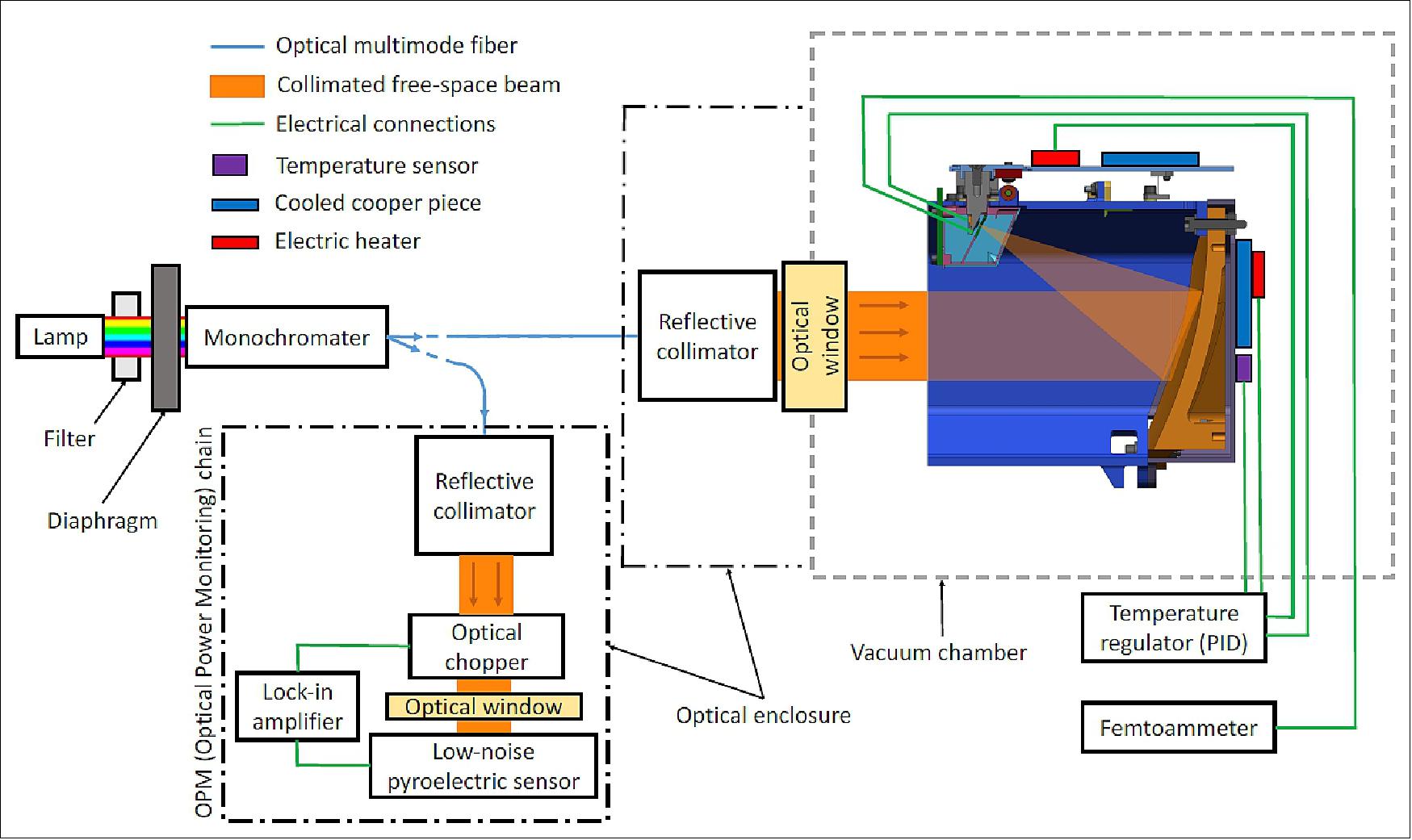
Spectral Characterization of the Receiver: We measured the responsivity of the receiver at ± 5% uncertainty (2σ confidence level) in the center of the four bands to verify the compliance with the responsivity requirements used in our mission-level performance model. To do so, the receiver housing and the mirror were stabilized at 228 K in a vacuum chamber (pressure: <3 x10-5 Torr), while the detector was stabilized at 208 K. The 228 K value corresponds to the middle of the operational temperature range [208, 248] K of the receiver housing and the mirror. The spectral responsivity was also tested at a mirror temperature of 208 K and 248 K, with no noticeable change in measurements.
During operation, the output current of the detector due to detected laser photons will vary from 10 to 344 pA, depending on the wavelength and the altitude for the current proposed lunar orbits. The current range of the flight electronics that is used to read the detector output current is equal to 0 to 10 nA to accommodate for the detected background with margins. The detector is linear up to at least 1 mW of optical power. To spectrally characterize the receiver, the center of the receiver FOV was illuminated through a vacuum chamber optical window with a collimated beam (divergence <1.8 mrad; diameter ~12 mm) of optical power from 160 to 520 nW, depending on the wavelength. In order to maximize the measurement precision and accuracy of the receiver responsivity, the optical output power of the characterization setup has not been attenuated down to the one predicted during the mission. This is not a problem as long as the receiver operates in its linear regime. The light source was a fiber-coupled monochromator aligned with a tungsten lamp, and the other end of the fiber was plugged into a “plug and play” silver-coated reflective collimator.
After reading the output current of the detector, the fiber was plugged into another silver-coated reflective collimator to illuminate a low noise (NEP=5 nW/√Hz) pyroelectric sensor (diameter of the detector: 5 mm; diameter of the beam on the active surface area: ~4 mm) in order to measure the optical power that was sent to the receiver. An identical optical window to the one used in the vacuum chamber was inserted before the pyroelectric sensor. Both reflective collimators that were used were mounted on a kinematic mount to finely adjust the pointing of the beam. A diaphragm was used to cut off the optical signal emitted by the monochromator to take a dark frame measurement of both the pyroelectric sensor signal and science detector signal. Then, the measurements with the monochromator output light illuminating the receiver mirror were adjusted by subtracting the background. The spectral characterization bench is depicted in Figure 18.
Here is the technical description of the principal components that were used to build the spectral characterization bench depicted in Figure 18:
• 950 nm cut-on wavelength long-pass filter: “FEL0950” from Thorlabs.
• 1450 nm cut-on wavelength long-pass filter: “FEL1450” from Thorlabs.
• Temperature sensors: “DT-670” from Lake Shore Cryotronics, Inc.
• Monochromator: “SDMC1-06G #95 850-2.2u” monochromator from Optometrics aligned with a “TS-20 W” tungsten lamp and controlled by a “PCM-02 110V” stepping motor controller (7 nm spectral linewidth, spectral repeatability: ≤0.5 nm).
• Fiber: “FG200LEA” multimode fiber from Thorlabs, 0.22 numerical aperture, Low-OH, Ø 200 µm core, 400 to 2400 nm.
• Reflective collimators: “RC12SMA-P01” and “RC02SMA-P01” protected silver-coated collimator from Thorlabs.
• Pyroelectric sensor: “THZ5B-BL-DZ” from Gentec Inc.
• Digital lock-in amplifier: “T-rad THz module” from Gentec Inc.
• Optical chopper: “SDC-500” from Gentec Inc.
• Femtoammeter: “Keithley 6430” with its remote pre-amplifier; parasitic bias introduced on the detector by the active feedback loop: <1 mV.
• Optical window: “VPW42” 1.5” diameter uncoated fused silica optical window from Thorlabs; parallelism: ≤5 arcsec, transmitted wavefront distortion: λ/8 at 633 nm.
• The monochromator was spectrally calibrated (spectral linewidth and wavelength as a function of stepper motor position, repeatability characterization) using the two different optical spectrum analyzers: “HP 70950A” for the 1064 nm and 1495 nm wavelengths, and “Yokogawa AQ6376” for the 1850 nm and 1990 nm wavelengths.
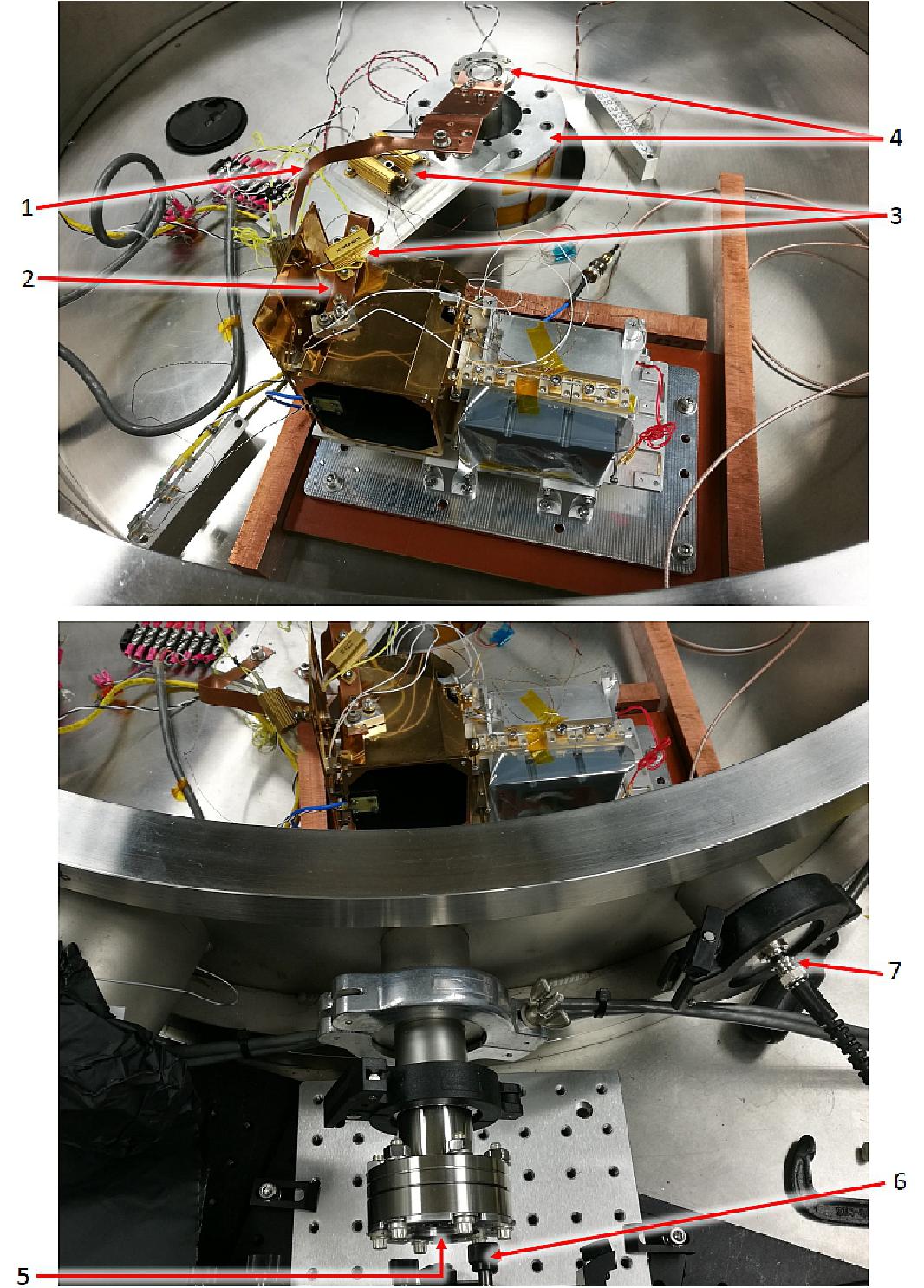
The required and measured responsivity in the center of the four operational wavelength bands are available in Table 2. As shown in Table 2, all of the measurements meet the requirements. Photographs of the flight hardware inside the vacuum chamber are shown in Figure 19.
Wavelength (nm) | Responsivity measurement (A/W) * | Responsivity requirement (A/W) |
1064 | 0.51 | >0.47 |
* Uncertainty: ± 5%, 2σ confidence level. The integration time of the femtoammeter and pyroelectric sensor was set to almost cancel the noise on the measurements (standard deviation on responsivity measurements <0.1%). The uncertainty on the measured responsivity comes from the calibration uncertainty of the equipment.
Characterization of the Dark Current and Detected Thermal Emission: While the receiver was in the vacuum chamber, the output current was measured with the diaphragm closed (Figure 18). This current is the sum of the detector dark current and the detected receiver thermal emission. A dark measurement of the current was taken with the receiver housing and mirror stabilized at 248 K, corresponding to the highest temperature during operation. If the detector is perfectly unbiased, the dark current of the detector should be null. However, the active feedback loop of the femtoammeter slightly biases the detector (bias <1 mV), which explains why a measurement of dark current in addition to the detected receiver thermal emission is necessary. The requirement was to measure a current <2 nA. A measurement of 0.38 nA was acquired, with an integration time set to get a standard deviation <1%. The goal of this measurement was to ensure that the receiver signal with no incoming light was below the requirement to prevent saturation of the electronics (the requirement for this dark measurement is <2 nA, and the current range of the flight electronics is 0 to 10 nA, so the requirement has been met with a large margin).
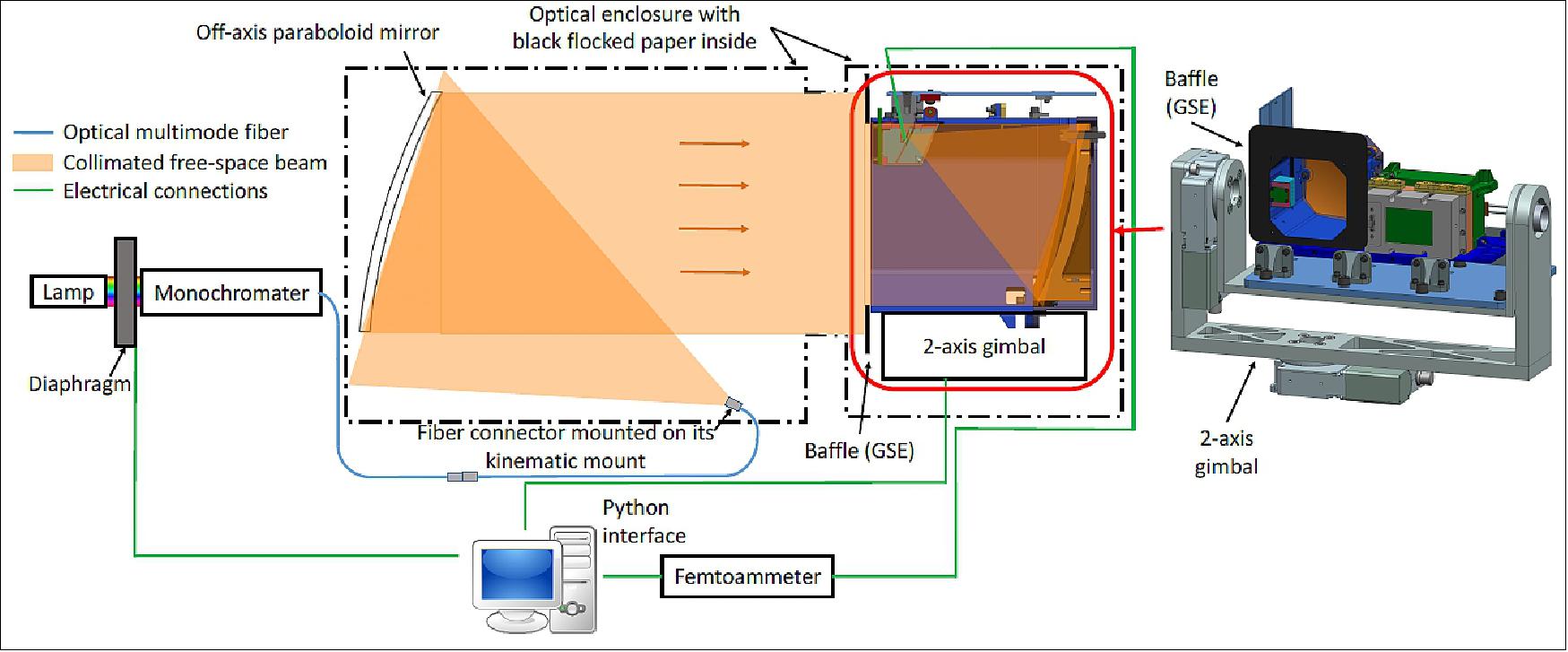
Characterization of the Receiver Field of View: The receiver FOV was characterized at room temperature using a motorized two-axis gimbal. The thermal design guarantees a negligible FOV difference between room temperature and the operational temperature. A collimated beam (full-angle divergence <0.35 mrad) illuminated the receiver aperture with a stable 1 to 2 µW optical output power beam, and the output current of the detector was measured for each angular position of the gimbal within an angular range of ±14 mrad, with 0.35 mrad resolution. The light source that was used was the same as that used for spectral characterization, with the monochromator grating positioned to output the zero-order diffraction, to maximize the output power coupled to the fiber. The FOV characterization bench was controlled by a computer with code written (in Python) to automatically take measurements. Each measurement was adjusted by subtracting the background. The FOV characterization bench is depicted in Figure 20, and the results are presented in Figure 21.
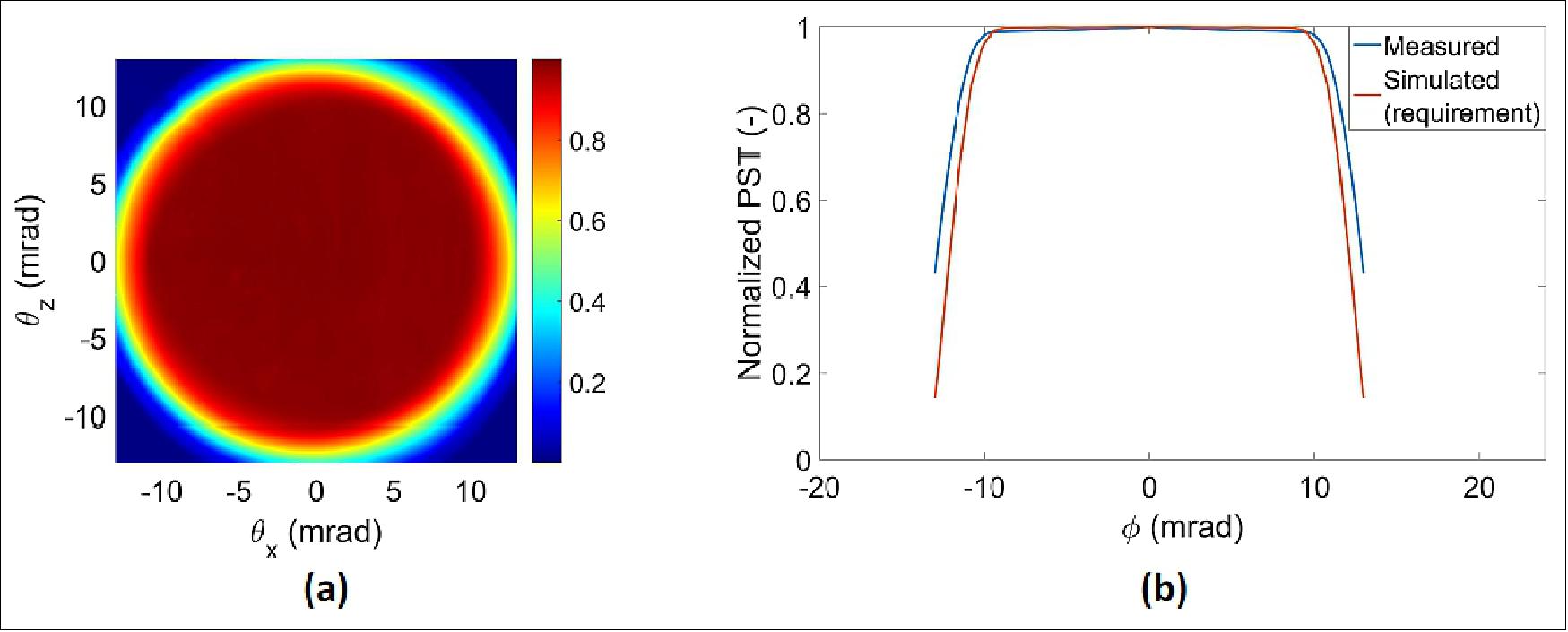
As shown in Figure 21b, the measured receiver FOV meets the requirement with some margin. Two factors can explain why the measured receiver FOV is slightly larger than the simulations:
• The fiber has been aligned with the large GSE off-axis paraboloidal mirror with a precision that guarantees a beam divergence <0.35 mrad. Thus, the beam illuminating the receiver aperture during the receiver FOV characterization is not perfectly collimated, and the PST measurement within ± 14 mrad corresponds to the convolution of the beam divergence profile with the actual receiver FOV. Thus, there is a small artifact introduced in the measurements that leads to measuring a slightly larger FOV.
• Simulations assumed a perfect 2 mm diameter for the detector active area diameter, while in practice, there is an out-of-area (OOA) response: this is a contribution to the response from the area outside the 2 mm optical size if the detector is overfilled with illumination, due to the standard product design. In our case, the OOA is between 2.08 mm (inner diameter) and 2.125 mm (outer diameter) per detector mask design, with a responsivity within the OOA that can reach 90% of the responsivity in the central region of the active area.
In summary, Lunar Flashlight is a technology demonstration mission whose goal is to show that useful measurements can be made within very demanding CubeSat resource limitations at a much lower cost than previously possible. LF’s measurement goal is to measure the surface abundance of water ice on the lunar South Pole with concentrations of 5 wt% or less, down to as little as 0.5 wt%, with a spatial resolution of 10 km or better. Regions of interest are permanently shadowed and occasionally sunlit regions poleward of 80º S latitude. Previous missions have already demonstrated the likely presence of H2O ice at the lunar poles, but have failed to accurately quantify its abundance and determine its form. Among the previous observations, the most relevant to LF are the surface reflectance variations measured by the LOLA 1064 nm laser altimeter [15)] and the ice-like reflectance spectra measured by M3. 16) These two observations verify that ice is likely present in sufficient quantities, such that Lunar Flashlight should be capable of detecting and quantifying ice abundance on the Moon’s surface.
References
1) ”Lunar Flashlight Selected to Fly as Secondary Payload on Exploration Mission-1,” NASA, 7 Feb. 2018 (update), URL: https://web.archive.org/web/20230113212450/https://www.nasa.gov/feature/lunar-flashlight-selected-to-fly-as-secondary-payload-on-exploration-mission-1/
2) P. O. Hayne, A. Hendrix, E. Sefton-Nash, M. A. Siegler, P. G. Lucey, K. D. Retherford, J. P. Williams, B. T. Greenhagen, D. A. Paige, ”Evidence for exposed water ice in the Moon’s south polar regions from Lunar Reconnaissance Orbiter ultraviolet albedo and temperature measurements,” Icarus, 15 July 2015, Vol. 255, pp: 58–69, https://doi.org/10.1016/j.icarus.2015.03.032
3) Q. Vinckier, P. O. Hayne, J.M. Martinez-Camacho, C. Paine, B. A. Cohen, U. J. Wehmeier, R. G. Sellar, ”System performance modeling of the Lunar Flashlight CubeSat Instrument,” 49th Lunar and Planetary Science Conference 2018 (LPI Contribution No. 2083), The Woodlands, Texas, USA, March 19-23, 2018, URL: https://www.hou.usra.edu/meetings/lpsc2018/pdf/1030.pdf
4) ”Lunar Flashlight CubeSat Mission,” NASA/JPL, URL: https://www.jpl.nasa.gov/cubesat/missions/lunar_flashlight.php
5) ”Lunar Flashlight Propulsion System,” VACCO,URL: https://www.cubesat-propulsion.com
/wp-content/uploads/2017/08/X16029000-01-data-sheet-080217.pdf
6) M. Michael Kobayashi, ”Iris Deep-Space Transponder for SLS EM-1 CubeSat Missions,” Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 5-10, 2017, paper: SSC17-II-04, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3603&context=smallsat
7) Quentin Vinckier, Luke Hardy, Megan Gibson, Christopher Smith, Philip Putman, Paul O. Hayne and R. Glenn Sellar, ”Design and Characterization of the Multi-Band SWIR Receiver for the Lunar Flashlight CubeSat Mission,” Remote Sensing, Vol. 11, Issue 4, https://doi.org/10.3390/rs11040440, Published: 20 February 2019, URL: https://media.proquest.com
/media/hms/PFT/1/AphqB?_s=aHbAfCkiNWUcmQaTUZjTwuGUkeo%3D
8) ”NASA CubeSat Will Shine a Laser Light on the Moon's Darkest Craters,” NASA/JPL, 27 April 2020, URL: https://www.jpl.nasa.gov/news/news.php?feature=7647
9) Barbara A. Cohen, Paul O. Hayne, Benjamin Greenhagen, David A. Paige, Calina Seybold, John Baker, ”Lunar Flashlight: Illuminating the Lunar South Pole,” IEEE Aerospace and Electronic Systems Magazine, Volume 35, Issue 3, https://doi.org/10.1109/MAES.2019.2950746, 1 March 2020, URL: https://web.archive.org/web/20211203142743/https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9076196
10) P. O. Hayne, D. A. Paige, A. P. Ingersoll, M. A. Judd, O. Aharonson, L. Alkali, S. Byrne,B. Cohen, A. Colaprete, J. P. Combe, et al., ”New Approaches to Lunar Ice Detection and Mapping: Study Overview and Results of the First Workshop,” Proceedings of the Annual Meeting of the Lunar Exploration Analysis Group, 14–16 October 2013; Volume 1748, p. 7043
11) Udo Wehmeier, Quentin Vinckier, R. Glenn Sellar, Christopher G. Paine, Paul O. Hayne, Mahmood Bagheri, Mina Rais-Zadeh, Siamak Forouhar, Jessica Loveland, Jacob Shelton, ”The Lunar Flashlight CubeSat instrument: A compact SWIR laser reflectometer to quantify and map water ice on the surface of the Moon,” Proceedings of SPIE, Vol. 10769, Optical Engineering + Application conference—'CubeSats and NanoSats for Remote Sensing II', San Diego, CA, USA, 21–22 August 2018
12) Quentin Vinckier, Karlton Crabtree, Megan Gibson, Christopher Smith, Udo Wehmeier, Paul O. Hayne, R. Glenn Sellar, ”Optical and mechanical designs of the multi-band SWIR receiver for the Lunar Flashlight CubeSat mission,” Proceedings of SPIE, Volume 10690, 'Optical Design and Engineering VII', 106901I, Frankfurt, Germany, 5 June2018, https://doi.org/10.1117/12.2302914
13) James E. Harvey, ”Light Scattering Characteristics of Optical Surfaces,” Ph.D. Thesis, University of Arizona, Tucson, AZ, USA, 1976
14) James E. Harvey, Narak Choi, Sven Schroeder, and Angela Duparré "Total integrated scatter from surfaces with arbitrary roughness, correlation widths, and incident angles," Optical Engineering Volume 51(1), 013402, Published:6 February 2012, https://doi.org/10.1117/1.OE.51.1.013402
15) Elizabeth A. Fisher, Paul G. Lucey, Myriam Lemelin, Benjamin T. Greenhagen, Matthew A. Siegler, Erwan Mazarico, Oded Aharonson, Jean-Pierre Williams, Paul O. Hayne, Gregory A. Neumann, David A. Paige, David E. Smith, Maria T. Zuber, ”Evidence for surface water ice in the lunar polar regions using reflectance measurements from the Lunar Orbiter Laser Altimeter and temperature measurements from the Diviner Lunar Radiometer Experiment ,” Icarus, Volume 292, August 2017, Pages 74-85, https://doi.org/10.1016/j.icarus.2017.03.023
16) Shuai Li, Paul G. Lucey, Ralph E. Milliken, Paul O. Hayne, Elizabeth Fisher, Jean-Pierre Williams, Dana M. Hurley, and Richard C. Elphic,”Direct evidence of surface exposed water ice in the lunar polar regions,” PNAS (Proceedings of the National Academy of Sciences if the United States of America), September 4, 2018, Volume 115 (36), pp: 8907-8912, URL: https://www.pnas.org/content/pnas/115/36/8907.full.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).