MarCO (Mars Cube One)
Non-EO
NASA
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
| Launch date | 05 May 2018 |
MarCO (Mars Cube One)
Spacecraft Launch Mission Status After Separation References
Background: For a space mission intended to land on the surface of another planet for scientific exploration, the mission phase called EDL (Entry, Descent, and Landing) is the most risky of all mission phases. NASA has landed several spacecraft on the surface of Mars using different EDL technologies from Viking’s entry from orbit to Curiosity’s direct entry. For each case, the spacecraft arrives at high speed to the top of Martian atmosphere marking the end of the cruise phase and the start of EDL phase, where the speed is significantly reduced and a complex sequence of events follows until touch down. Due to the long round-trip light time between the spacecraft and ground controllers, mission teams rely on pre-programmed sequence execution without human interference and only monitor the resulting actions. Such monitoring requires near real-time communications from the landing vehicle to the ground stations either via a relay to an over-head orbiter, directly to Earth, or both. The DTE (Direct-To-Earth) method branches into two different techniques, telemetry and carrier-only.
CubeSat Relay Concept And the MarCO Mission: 1) 2)
When preparing for the InSight (Interior Exploration using Seismic Investigations, Geodesy and Heat Transport) mission EDL at Mars, originally planned to occur in 2016 and is currently planned for 2018, the JPL team was called upon to implement a DTE best-efforts approach to pick up the UHF carrier as was done with Phoenix, since the InSight spacecraft bus is inherited from the Phoenix bus. Work proceeded to make arrangements with large radio telescopes as has been done in the past. This time, however, new ideas and technologies have evolved since the Curiosity EDL to create a new concept. The advent of CubeSats commonly utilized at universities and launched for short duration mission in the Earth environment was a big factor. CubeSats, however, have never been flown in deep space or towards planetary targets. Among other limitations to achieve sufficiently distant deep space missions was the communications system. A CubeSat-sized transponder had not existed and X-band antennas as well as power amplifiers were also too big. However, JPL had breakthroughs in these areas in recent years. JPL prototyped a CubeSat-specific transponder called Iris initially intended to fly on the INSPIRE mission. This opened up the possibility of exploring a Mars CubeSat mission. Our formulation team studied the concept and documented a feasible spacecraft for management to secure funding. The mission is named MarCO (Mars Cube One).
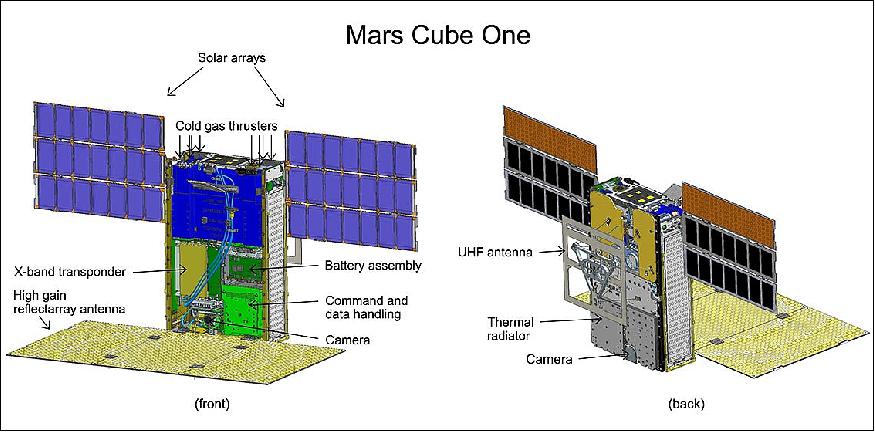
Spacecraft
When NASA launches its next mission on the journey to Mars – a stationary lander in 2018 – the flight will include two CubeSats. This will be the first time CubeSats have flown in deep space. If this flyby demonstration is successful, the technology will provide NASA the ability to quickly transmit status information about the main spacecraft after it lands on Mars. 3) 4) 5) 6) 7) 8)
The twin communications-relay CubeSats, being built by NASA/JPL (Jet Propulsion Laboratory), Pasadena, California, constitute a technology demonstration called Mars Cube One (MarCO). CubeSats are a class of spacecraft based on a standardized small size and modular use of off-the-shelf technologies. Many have been made by university students, and dozens have been launched into Earth orbit using extra payload mass available on launches of larger spacecraft.
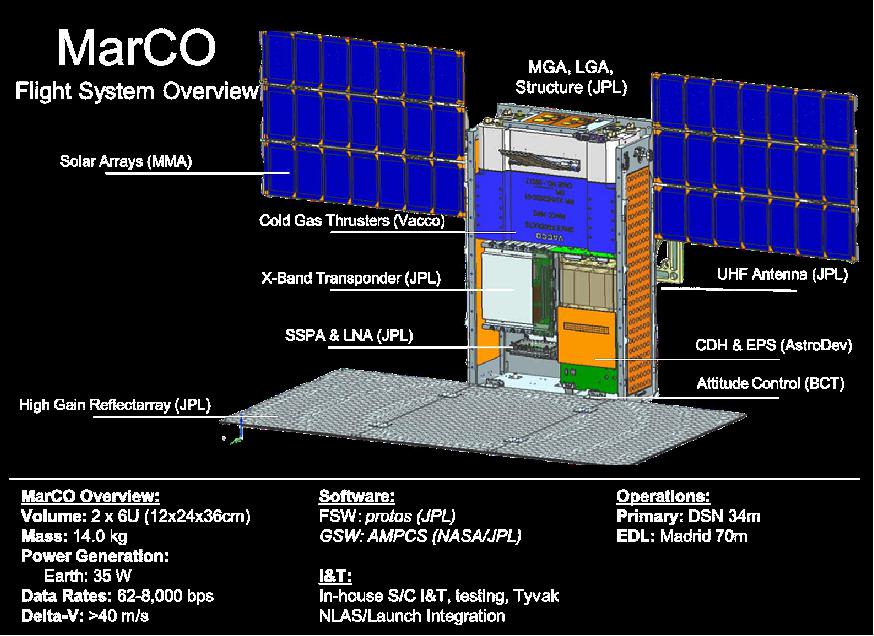
MarCO's design is a 6U CubeSat with a stowed size of about 36.6 cm x 24.3 cm x 11.8 cm. MarCO will launch in May 2018 from Vandenberg Air Force Base, California on the same United Launch Alliance Atlas V rocket as NASA’s InSight (Interior Exploration using Seismic Investigations, Geodesy and Heat Transport) lander. Insight is NASA’s first mission to understand the interior structure of the Red Planet. MarCO will fly by Mars while InSight is landing, in November2018.
Technology suppliers for MarCO include: Blue Canyon Technologies of Boulder, Colorado, for the attitude-control system; VACCO Industries of South El Monte, California, for the propulsion system; AstroDev of Ann Arbor, Michigan, for electronics; MMA Design LLC, also of Boulder, for solar arrays; and Tyvak NanoSatellite Systems Inc., a Terran Orbital Company in San Luis Obispo, California, for the CubeSat dispenser system.
C&DH (Command and Data Handling): AstroDev, LLC is providing an MSP430F2618 based Command and Data Handling board for the MarCO CubeSats. This board is based on modifications to the INSPIRE design, itself heritage from the RAX spacecraft. The C&DH has onboard non-volatile storage, a real-time clock, and cascaded watchdog system, and interfaces (SPI, I2C, UART, GPIO and RS-422) to all onboard subsystems.
A custom software, protos, was developed for INSPIRE and adapted for MarCO. This real-time operating system builds upon heritage from many previous JPL missions, yet fits within 128 kB of flash memory, and only 8 kB of RAM. The software allows for uploadable sequences, storage and transmission of real-time and historical telemetry, CCSDS packetizing for communications, and, most importantly, fault monitoring & response.
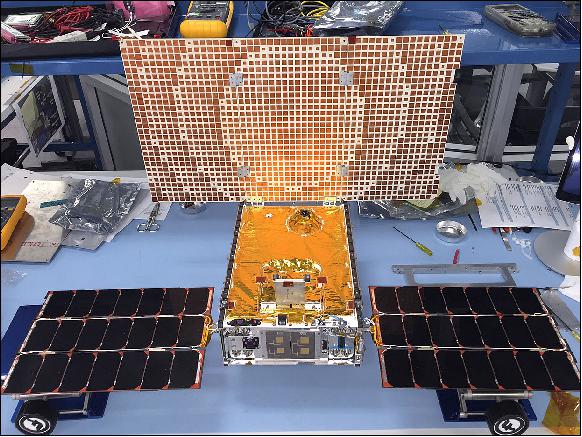
Power System: The MarCO CubeSats are powered by solar arrays, developed by MMA, LLC. These arrays fold to a single 3U panel for launch, but unfurl to reveal 42 solar cells, providing approximately 35 W of power (at 1AU). Each panel rotates upon deployment, but remains in a fixed position for the remainder of the flight.
The University of Michigan, under subcontract to AstroDev, provided the Electrical Power System for the MarCO CubeSats. The single set-point system allows of four channels of solar panel input, while regulating 5 V and 3.3 V buses (in addition to a battery bus). As MarCO utilizes a 3S4P Lithium Ion battery configuration, the power system was upgraded to an approximately 12 V battery bus. — The 18650B Lithium Ion batteries have been tested, screened, and assembled by the power systems section at JPL. A significant effort was made in matching cells and assuring good performance throughout the flight. These cells are protected by custom battery protection circuitry, and monitored by the C&DH subsystem.
RF communications: The heart of the MarCO CubeSats is the Iris V2 radio, customized for the MarCO mission to include a UHF receiver. This software-defined radio has up to 4 W RF output at X-band frequencies, is fully DSN compatible, and has 4 receive and 4 transmit ports. The Iris radio of JPL is capable of coherent 2-way Doppler, ranging, and DOR (Differential One-way Ranging) tones. To better accommodate mission communication and thermal requirements, the radio has an external solid-state power amplifier and low noise amplifier. In addition, the radio has been designed to be radiation tolerant. 9)
Each MarCO craft has a low-gain patch antenna for near-Earth communications with wide beamwidth, a medium gain patch array for safe-mode communications far from Earth, and a high-gain reflectarray antenna for high-speed data. The high gain antenna, paired with the Iris radio, can maintain an 8 kbit/s link from 1.05 AU. - In addition, a UHF loop antenna is deployed from the bottom of the spacecraft to receive data from the InSight lander during EDL (Entry, Descent, and Landing). 10)
Deep Space Transponder: The Iris radio was tested at the DSN Test Facility (DTF) to show RF compatibility and end-to-end dataflow. It is of utmost importance to provide final firmware/software within the radio to assure that measurements taken during the test may be trusted for flight operations, including receive threshold, power output, and expected data format. Much of this information is contained within the flightground interface control document. The flight mission operations center should be utilized for the end-to-end test to assure minimum risk to flight operations. 11)
The twin MarCO CubeSats are will be the first to travel into deep space, flying with NASA’s InSight lander when it launches in May. Arriving at the Red Planet in November, these CubeSats will help provide realtime communication between the lander and NASA’s DSN (Deep Space Network) here on Earth. They’ll be working alongside the MRO (Mars Reconnaissance Orbiter), which has been orbiting the planet since 2006.
Attitude Determination, Control, and Propulsion: Blue Canyon Technologies is providing the XACT (fleXible ADCS Cubesat Technology) attitude control unit, which includes a star tracker, gyro, coarse sun sensors, and 3-axis reaction wheels. Several modifications have been made to the base unit to include an additional coarse sun sensor and control of the thruster system. In addition, the software has been modified to account for deep space trajectories and related items.
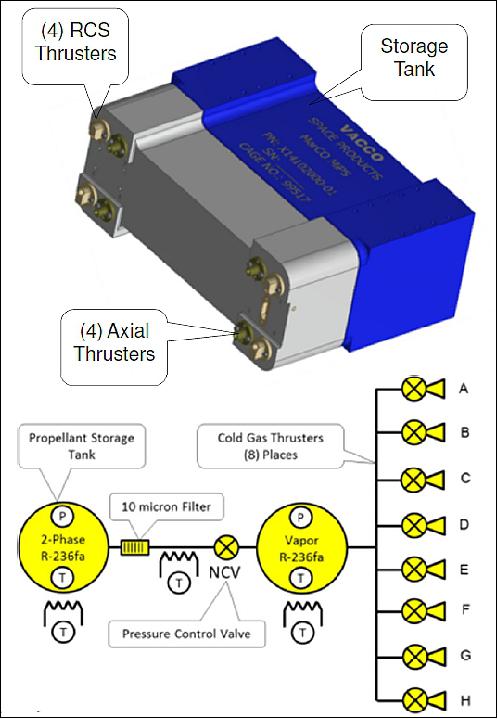
The onboard micro propulsion system, built by Vacco, contains 8 thrusters – 4 canted for attitude control, and 4 for TCMs (Trajectory Correction Maneuvers). Vacco’s single tank design houses all electronics, valves, and propellant. The propellant is R-236FA, a cold-gas propellant often used in fire extinguishers. MarCO uses a cold gas propulsion system with a capability of 755 Ns, providing in excess of 40 m/s of TCM ΔV, enough for what is needed for a Mars-bound mission. The thrusters will operate for trajectory adjustments and for desaturating the reaction wheels. -The XACT system commands the thrusters to fire both for reaction wheel desaturation, as well as for the TCMs. For safety, power control of the propulsion system is maintained by the C&DH.
Structure, Thermal and Harnessing: Both the structure and harnessing (cabling and interface boards) have been designed by engineers at JPL. The structure maintains compatibility with the 6U CubeSat standard.
The MarCO thermal design includes two discrete radiators, thermal blanketing, onboard heaters, and a myriad of temperature sensors throughout the vehicles. As the craft will significantly change their distance from the sun, the project has carefully balanced radiator sizing against subsystem “on” time, power usage, and replacement heater considerations. With the tightest thermal constraints, the batteries have a dedicated radiator to isolate them from larger swings in the overall vehicle temperature.

Launch
The two experimental MarCO CubeSats were launched on 5 May 2018 (11:05 UTC) as secondary payloads of the NASA InSight mission to Planet Mars. The Atlas V-401 vehicle of ULA was the launch vehicle and the launch site was VAFB, CA. 13) 14) 15)
The spring-loaded CubeSat deployment system for MarCO is on the aft bulkhead carrier of the Centaur upper stage of InSight's Atlas V launch vehicle. That is near the base of the Centaur, not inside the fairing that encloses the main spacecraft. At launch and until the Centaur upper stage separates from the first stage of the Atlas V, the aft bulkhead carrier is sheltered within an inter-stage adaptor between the launch vehicle and the second, or upper, stages. 16)
After the Centaur upper stage has released the InSight spacecraft on course toward Mars, it will do a short roll, then release MarCO-A, roll 180 degrees further and release MarCO-B.
Orbit of MarCO: The two CubeSats will separate from the Atlas V booster after launch and travel along their own trajectories to the Red Planet. After release from the launch vehicle, MarCO's first challenges are to deploy two radio antennas and two solar panels. The high-gain, X-band antenna is a flat panel engineered to direct radio waves the way a parabolic dish antenna does. MarCO will be navigated to Mars independently of the InSight spacecraft, with its own course adjustments on the way.
Mission Status
• August 2019: On November 26th, 2018, the MarCO spacecraft completed their journey to Mars, having flown 6.5 months and over 450 million kilometers. Both spacecraft encountered significant challenges during their journey, including safe-mode entries, a leaky thruster, and necessary software updates, but they successfully arrived to relay data for the InSight mission during its entry-descent-and-landing at Mars. 17)
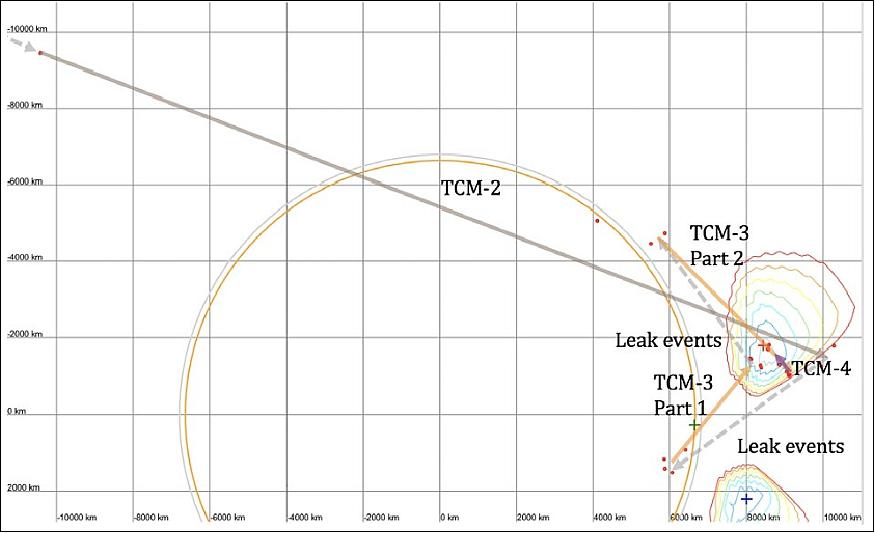
- Both MarCO spacecraft followed InSight to Mars in a loose formation for much of the cruise, separated by roughly 10,000 km. MarCO-A completed three trajectory correction maneuvers in May, August, and October in preparation for Mars flyby. MarCO-B performed an additional TCM (Trajectory Correction Maneuver) in November to better align for flyby.
- During cruise MarCO-B developed a propulsive leak, which required constant maintenance and monitoring. Prior to launch, the team observed a slight leak from the tank to the plenum chamber, but accepted the risk for flight (the observed leak filled the plenum chamber over approximately four days). In flight, a second leak developed through a thruster valve, causing a continuous moment on the spacecraft attitude.
- To handle the leak, the team altered the spacecraft behavior to empty the plenum every 15 to 30 minutes, significantly reducing the overall impulse, but causing a near continuous thrust(adjustments to TCMs were required to accommodate).The leak from the tank to the plenum continued to fluctuate over the course of the mission, leading to occasional periods of “high” leaks that tended to slow as the tank increased in temperature, over the course of a few days. Accommodation of the leak led to a continued effort to reduce usage of the prop system, most notably by successfully dumping momentum accumulated by the reaction wheels through solar radiation pressure moments on the large high gain antenna and solar panels. By experimenting with different orientations of the panels with respect to the sun, the team derived a set of attitudes that could transfer or reduce momentum from the wheels, negating the need for propulsive desaturations. This reduced the before-flight estimate of 1-2 propulsive desats per day to almost none across the entire mission and both spacecraft.
- Onboard behaviors were modified to handle the leak mitigation, including modifying safe-mode, nominal mode, fault detection, and even which telemetry points were recorded (the navigation team desired more insight into the propulsive events). The flight software ran eight independent sequence engines to execute up to eight sequences simultaneously, and could store up to another eight in onboard memory. Together, this led to significant flexibility of the system – even allowing for “brain-surgery” on the spacecraft without the need (or capability) to swap to an alternate processor.
Mars Encounter
- On November 25th, 2018, both spacecraft approached Mars. With only twenty-four hours until EDL (Entry Descent and Landing), MarCO-A reported in healthy, however MarCO-B missed a pass, with a likely entry into safe mode. InSight donated several uplink passes, however no signal was detected throughout the afternoon. Should the spacecraft have had a radio or attitude control issue, rather than a safe-mode entry, the command-loss timer would cause a safe-mode entry late night (the timer had been reduced to a several hours in anticipation that the team might need to recover from safe-mode quickly prior to EDL). Though half of the team worked late into the night, no signal was detected. This led to two paths – either MarCO-B would wake up according to the wake-up table Monday morning, or the spacecraft was in an unrecoverable state.
- At 6:05 am, Monday morning, November 26th, MarCO-B’s signal was received by the DSN. Telemetry indicated that several commands had been received the previous day by the broad MGA, however it was likely the spacecraft was off-pointed, so the narrow-beamed HGA transmit signal did not reach Earth. At the 6:30 am tagup, MarCO-A and MarCO-B were reported “GO” for EDL support.
- Just after 7:15 am, MarCO-A’s carrier signal rolled-off. With four and a half hours to EDL, MarCO-A was missing and MarCO-B had disappeared once in the last day.
- Telemetry indicated that the star tracker was likely being blinded by “Mars-shine”. At 11:14 and 11:16 am (Earth receive Pacific time) respectively, MarCO-B and MarCO-A signals were received by the DSN. Each spacecraft reported healthy telemetry, though MarCO-A’s star tracker was not yet in fine-tracking mode. Because of Mars-shine, the spacecraft was forced to propagate on gyros, causing the spacecraft attitude to slowly drift away from pointing at Earth. MarCO-B rotated to image Phobos at 11:16 and turned back at 11:31 am. MarCO-A’s again lost signal after telemetry indicated that the star tracker was still not in fine-pointing, but several minutes later, both MarCO-B and MarCO-A reported they had entered EDL mode, were at Bent-Pipe attitude, and had star trackers in lock – once the star trackers were “looking” past Mars, shine was no longer an issue.
- At 11:41 am, both spacecraft sent telemetry indicating UHF carrier had been detected. This was confirmed with the Earth-based UHF receivers which could receive the UHF carrier, but not decode data due to the low link margin. UHF telemetry began at 11:46 am, and both MarCO’s started the relay. Woven within the relay was the limited health, safety, and RF telemetry for mission support.
- InSight soon entered the period of expected plasma blackout. MarCO-B dropped the carrier for only 15 seconds, while MarCO-A lost 38 seconds of data. It then deployed its parachute at 11:51 am, indicated in the RF signal by a Doppler shift. Lander separation from the backshell occurred at 11:53 am, indicated by a brief change to carrier-only, and the lander touched down on Mars at 11:54 am, November 26th, 2018.
- Five minutes later, the InSight UHF signal turned off – in that time, the first image InSight took of Mars was relayed to Earth from the MarCO’s. All telemetry showed a healthy EDL with a spacecraft ready to extend its solar arrays and begin the science mission. Overall, MarCO-A sent 93% of all InSight EDL data. MarCO-B sent 97%.
- In the subsequent hours, MarCO-A performed a radio occultation experiment with it’s X-band signal being occluded by Mars to characterize the atmosphere. MarCO-B attempted photos of Mars and its moon Deimos. And both spacecraft repeated their transmissions of UHF data for redundancy – these were not needed, as no frames were lost in the initial transmission to Earth.
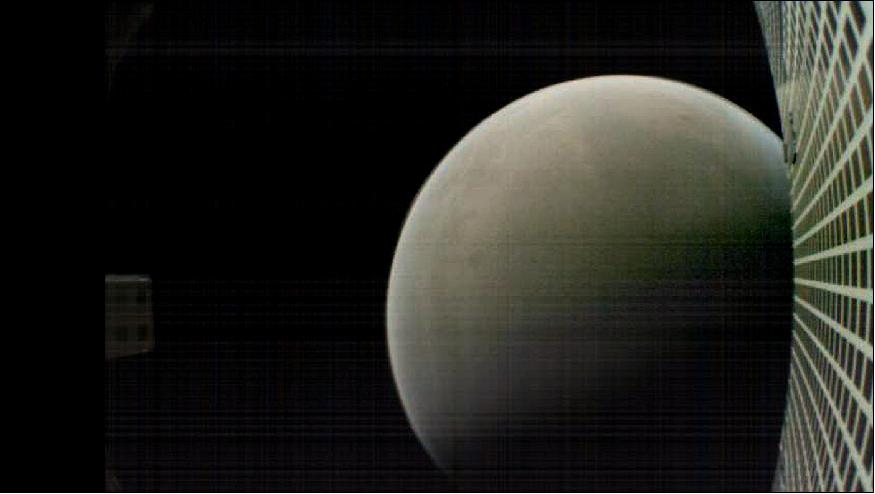
- Over the following days, MarCO-B transmitted several images of Mars taken by its wide field of view camera, including those showing Elysium Planetia, where InSight landed; the poles of Mars, white from the ice caps; several volcanoes; and even two dim and small images of Phobos. Unfortunately, most of the attempts to image Phobos and Deimos failed. Even so, the limited effort spent on the cameras paid off as the team was able to provide a “Farewell” image of Mars, with the MarCO high gain antenna and feed prominent in the view. MarCO’s primary mission was a success (see Figure 12).
Extended mission
- While MarCO’s primary objective was complete following InSight’s successful landing on Mars, as a technology demonstration mission, there was significant interest in further characterizing the hardware in each spacecraft. Both spacecraft remained healthy in the days after EDL. The first focus was on retrieving as much onboard data as possible for use in system characterization. This included onboard telemetry history, telemetry points not usually downlinked, and in-focus images taken before or after Mars.
- Prior to EDL, each MarCO took advantage of MSPA (multiple spacecraft per aperture) opportunities with InSight (and each other) to maximize the track time, with numerous downlink-only opportunities. After Mars, there was no InSight to partner with, and the two different flyby trajectories caused each MarCO to begin separation from the other. For the first time, tracks could not be shared between the vehicles.
- With three planned tracks per week, each spacecraft has limited communication opportunity. In addition, with the distance between the spacecraft and Earth quickly increasing, data rates begin to significantly decrease. While pre-launch datarates only included 62.5 bit/s, 1 kbit/s and 8 kbit/s downlink and 62.5 bit/s and 1 kbit/s uplink, further rates were tested and implemented during cruise. This allowed for a stepped decrease as range increased. By the end of December, 2018, the spacecraft were downlinking at 1 kbit/s and used a 500 bit/s uplink.
- In the months leading up to EDL, a small team examined possibly flyby targets once the vehicles had passed Mars. While numerous small body objects exist, few were accessible within the constraints of MarCO, most notably the limited propulsive capability. Though the flyby might have been altered to make use of a gravitational slingshot, this would have added significant constraints to InSight support, and was considered ill-advised. Once options were identified (and the list was re-evaluated following each maneuver), they were evaluated for propulsive feasibility, duration of journey, and orbit condition code (the certainty of the trajectory of the small body object). More targets were accessible to MarCO-B rather than MarCO-A.
- With EDL support complete, and potential extended mission under discussion, focus turned toward updating parameters onboard the two vehicles. On December 24th, MarCO-B began to indicate the return of mid-size leaks (larger plenum pressure measurements of approximately 400 Torr were taken between slow-blow events), and by December 28th, strong blowdowns with no significant plenum pressure drop, along with repeated automatic wheel desaturations showed that the vehicle was again in the strong blowdown regime. Due to the in-progress desaturations, parameter updates were postponed.
- On 2 January 2019, no transmissions were heard from MarCO-A. Previous contacts had shown a healthy spacecraft, with primary activities downlinking historical telemetry. There were some initial indications that the star tracker had occasional loss of lock, but no other adverse behavior.
- In follow-on scheduled passes, the DSN was unable to detect telemetry or carrier for either vehicle. Attempts to command-in-the-blind, specifically to reset the attitude control subsystem and put the radio in a low-data-rate mode were unsuccessful. By mid-January, both wake-up tables had run out, and the command-loss timer had expired, guaranteeing that each vehicle would be in safe mode, cycling through data rates and antennas, with periods of charge in between.
- Throughout the month of January, the team undertook parallel campaigns of command-in-the-blind along with long listening periods and examining downlinked telemetry. In addition to the usual 34 m apertures, 70 m dishes at high power levels were utilized to attempt to “break-in” to the spacecraft, even if the onboard attitude or antenna selection led to a low link margin. Of the last data downlinked, including historical data from the days preceding loss of contact, both spacecraft indicated occasional, but increasing, star tracker loss-of-lock. This corresponded with coarse sun sensor telemetry showing occasional inability to find the sun.
- The coarse sun sensors detect the sun by comparing the measured light value on each individual photodiode, assuring that the levels are above a pre-set threshold (intended to ignore reflections, glint, or other spurious light). Should light not be detected on any of the photodiodes, and the star tracker is not in lock, the system will propagate attitude knowledge based on the onboard gyro (which can cause significant drift with no absolute attitude reference). After a pre-set timeout, without star-tracker or sun detection, the ACS (attitude control system) will attempt to rotate the vehicle to perform a sky search and re-lock on the sun. Each commanded attitude change can be faster than the maximum rotation rate of the star tracker, decreasing the likelihood of lock. The frequent attitude changes also cause an increasing rate of momentum build-up in the reaction wheels due to inevitable friction within the system.
- In early January, analysis of coarse sun sensor telemetry indicated that the levels of sunlight on the craft were at the edge of the software-set threshold for spurious light protection. While the threshold had been predicted to be suitable for some months ahead, updated comparisons had not been performed. If the coarse sun sensors had been unable to find the sun, causing the vehicle to enter sun-search mode, the spacecraft would spend less time with solar panels charging, likely leading to the spacecraft entering a power-negative state, and the radio unable to appropriately point toward the Earth.
- Other scenarios might also have played out: MarCO-B was clearly in a high-leak state at the time of loss of contact and may have been unable to desaturate reaction wheels, eventually entering into a spin state accelerated by solar radiation pressure. Either vehicle might have had a failure of a single-string component due to radiation or a high-energy particle. Even a few corrupted bits within the CDH’s (Command and Data Handling) boot sector could have prevented a reboot or safe-mode entry. While these scenarios would lead to a sudden loss of contact, having both spacecraft lost within days of each other indicates a likely systemic failure.
- If the spacecraft were lost due to an incorrect coarse sun-sensor threshold, there is a chance the vehicles drained their batteries and are continuing along their elliptical trajectories powered off. Even with minimal power (the CDH only requires approximately 3.3 V to boot), both the radio and reaction wheels need voltages greater than 8V and significantly more current to power on. But as the trajectories will again bring the spacecraft closer to the sun, NASA may elect a short recontact campaign in the autumn of 2019 to attempt communications when more power is available to the vehicles and the coarse sun-sensors would detect the sun at levels that exceed the current threshold.
- Due to the loss of communication, the MarCO’s primary mission was declared complete on February 2nd, 2019, with any extended mission pending reestablishment of communications and subsequent approval.
- With the primary focus of the mission on technology demonstration and support of InSight, management and preparation of the extended mission was minimal. As the ACS parameters were working for both TCMs and flight, there was little appetite for the additional risk of altered onboard parameters prior to the flyby. The nature of low-cost small spacecraft requires focus on primary objectives given the relatively small team size. For MarCO, this also required a limitation in ongoing analyses and trending that might have identified a forthcoming threshold violation for the coarse sun sensors. It was a tradeoff accepted for MarCO’s mission that (likely) led to both primary mission success and eventual loss of communications.
- In summary, MarCO, the smallest spacecraft to ever complete an interplanetary mission, has enabled a new class of planetary exploration. With low cost and fast schedule, MarCO demonstrated the feasibility of a constraint-driven interplanetary small spacecraft. The technology developed for MarCO, including the critical Iris radio, modified commercial hardware, and the flight software, are all available for use from the mission partners and commercial entities. Continued investment from NASA, ESA, JAXA, and others implies a bright future for solar system exploration with small spacecraft, however, as with MarCO, significant challenges, setbacks, and failures will occur.
- MarCO was successful because of a narrow focus, an acceptance of risk, and significant support of lab and NASA leadership. It built upon technology developed over many missions, and was motivated directly from the success of the world-wide CubeSat community. While the mission was never required for InSight success, ultimately over seven million world-wide observers watched the near real-time descent of the lander through the seven-minutes of terror, with all telemetry relayed through the two MarCO spacecraft. Even InSight’s first image of Mars was sent via MarCO – subsequent media metrics showed more than five billion “impressions” from articles, interviews, social media postings and replays in the follow-on days.
- MarCO’s key lessons stem from the deliberate development of systems with excess capability that could be used in flight operations, and the use of a small multidisciplinary (and co-located team). A streamlined governance model served to oversee and understand the risks undertaken by the mission, mitigated through extensive end-to-end testing and multiple high-fidelity testbeds. The engineering model spacecraft, serving as a testbed, was critical to mission success, and ultimately was used in all aspects of mission operations – checkout, nominal cruise, failure recovery and EDL planning.
- It is our hope that MarCO is only the first of many new small spacecraft exploring the solar system. The choices made by the MarCO team can be traced back to previous missions like RAX, INSPIRE, and ASTERIA, through the testing and development of parts, the slow acceptance of risky choices, and the creation of operational procedures and behaviors. Some early choices, like RAX choosing to design a simplistic setpoint controller for its power system, directly led to the robustness of the MarCO design. Others ended up being constraining, like the eventual need to utilize 2.5 kg of tungsten ballast. Yet the evolution of the MarCO project shows that an in depth understanding of where design choices come from – not just the choice itself – leads to an opportunity for exploitation toward mission success.
• February 5, 2019: Before the pair of briefcase-sized spacecraft known collectively as MarCO launched last year, their success was measured by survival: If they were able to operate in deep space at all, they would be pushing the limits of experimental technology. 18)
- Now well past Mars, the daring twins seem to have reached their limit. It's been over a month since engineers have heard from MarCO, which followed NASA's InSight to the Red Planet. At this time, the mission team considers it unlikely they'll be heard from again.
- MarCO (Mars Cube One) was the first interplanetary mission to use a class of mini-spacecraft called CubeSats. The MarCOs - nicknamed EVE and WALL-E, after characters from a Pixar film - served as communications relays during InSight's landing, beaming back data at each stage of its descent to the Martian surface in near-real time, along with InSight's first image. WALL-E sent back stunning images of Mars as well, while EVE performed some simple radio science.
- All of this was achieved with experimental technology that cost a fraction of what most space missions do: $18.5 million provided by NASA's Jet Propulsion Laboratory in Pasadena, California, which built the CubeSats.
- WALL-E was last heard from on Dec. 29; EVE, on Jan. 4. Based on trajectory calculations, WALL-E is currently more than 1 million miles (1.6 million kilometers) past Mars; EVE is farther, almost 2 million miles (3.2 million kilometers) past Mars.
- The mission team has several theories for why they haven't been able to contact the pair. WALL-E has a leaky thruster. Attitude-control issues could be causing them to wobble and lose the ability to send and receive commands. The brightness sensors that allow the CubeSats to stay pointed at the Sun and recharge their batteries could be another factor. The MarCOs are in orbit around the Sun and will only get farther away as February wears on. The farther they are, the more precisely they need to point their antennas to communicate with Earth.
- The MarCOs won't start moving toward the Sun again until this summer. The team will reattempt to contact the CubeSats at that time, though it's anyone's guess whether their batteries and other parts will last that long.
- Even if they're never revived, the team considers MarCO a spectacular success.
- "This mission was always about pushing the limits of miniaturized technology and seeing just how far it could take us," said Andy Klesh, the mission's chief engineer at JPL. "We've put a stake in the ground. Future CubeSats might go even farther."
- A number of the critical spare parts for each MarCO will be used in other CubeSat missions. That includes their experimental radios, antennas and propulsion systems. Several of these systems were provided by commercial vendors, making it easier for other CubeSats to use them as well.
- More small spacecraft are on the way. NASA is set to launch a variety of new CubeSats in coming years.
- "There's big potential in these small packages," said John Baker, the MarCO program manager at JPL. "CubeSats - part of a larger group of spacecraft called SmallSats - are a new platform for space exploration that is affordable to more than just government agencies."
• November 27, 2018: NASA's MarCO mission was built to see whether two experimental, briefcase-sized spacecraft could survive the trip to deep space, and the two CubeSats proved more than able. After cruising along behind NASA's InSight for seven months, they successfully relayed data back down to Earth from the lander during its descent to the Martian surface on Monday, Nov. 26. 19)
- MarCO-A and MarCO-B (nicknamed "EVE" and "WALL-E") used experimental radios and antennas, providing an alternate way for engineers to monitor the landing. The CubeSats provided information to InSight's landing team in just 8 minutes - the time it took for radio signals to travel from Mars to Earth. That was much faster than waiting on NASA's Mars orbiters, which weren't positioned to be able to observe the entire event and send data back to Earth immediately.
- "WALL-E and EVE performed just as we expected them to," said MarCO chief engineer Andy Klesh of NASA's Jet Propulsion Laboratory in Pasadena, California, which built the CubeSats. "They were an excellent test of how CubeSats can serve as 'tag-alongs' on future missions, giving engineers up-to-the-minute feedback during a landing."
- Landing on Mars is exceptionally difficult: Before InSight, only about 40 percent of all attempts by various nations had succeeded. Even if a spacecraft doesn't survive landing, having a "black box" - or a pair of them, as with MarCO - to record the event can help engineers design better landing technology.
- Neither of the MarCO CubeSats carry science instruments, but that didn't stop the team from testing whether future CubeSats could perform useful science at Mars. As MarCO-A flew by, it conducted some impromptu radio science, transmitting signals through the edge of Mars' atmosphere. Interference from the Martian atmosphere changes the signal when received on Earth, allowing scientists to determine how much atmosphere is present and, to some degree, what it's made of.
- "CubeSats have incredible potential to carry cameras and science instruments out to deep space," said John Baker, JPL's program manager for small spacecraft. "They'll never replace the more capable spacecraft NASA is best known for developing. But they're low-cost ride-alongs that can allow us to explore in new ways."
- As a bonus, some consumer-grade cameras aboard MarCO provided "drive-by" images as the CubeSats sailed past Mars. MarCO-B was programmed to turn so that it could image the planet in a sequence of shots as it approached Mars (before launch, MarCO-A's cameras were found to be either non-functioning or too blurry to use).
- After the landing, MarCO-B turned backward to take a farewell shot of the Red Planet. It also attempted to snap some photos of Mars' moons, Phobos and Deimos.
- "WALL-E sent some great postcards from Mars!" said Cody Colley of JPL, MarCO's mission manager, who led the work to program each CubeSat to take images. "It's been exciting to see the view from almost 1,000 miles (1,600 km) above the surface."
- With the mission's objectives reached, the MarCO team will spend the next couple of weeks collecting additional data on each CubeSat. Of interest will be how much fuel is left in each CubeSat and detailed analyses of how their relay capability performed.
• One of the twin MarCO CubeSats snapped this image of Mars on Oct. 3 - the first image of the Red Planet ever produced by this class of tiny, low-cost spacecraft. The two CubeSats are officially called MarCO-A and MarCO-B but nicknamed "EVE" and "Wall-E" by their engineering team. 20)
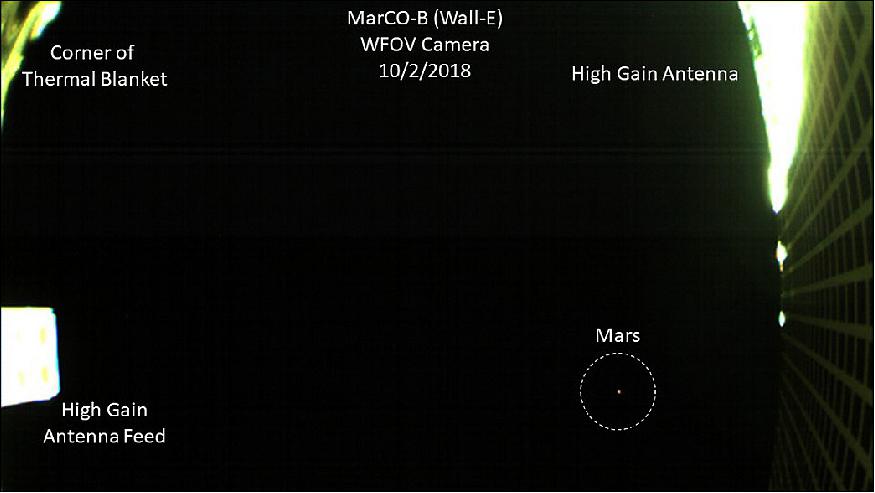
- A wide-angle camera on top of MarCO-B produced the image as a test of exposure settings. The MarCO mission, led by NASA's Jet Propulsion Laboratory in Pasadena, California, hopes to produce more images as the CubeSats approach Mars ahead of Nov. 26. That's when they'll demonstrate their communications capabilities while NASA's InSight spacecraft attempts to land on the Red Planet. (The InSight mission won't rely on them, however; NASA's Mars orbiters will be relaying the spacecraft's data back to Earth.)
- This image was taken from a distance of roughly 8 million miles (12.8 million km) from Mars. The MarCOs are "chasing" Mars, which is a moving target as it orbits the Sun. In order to be in place for InSight's landing, the CubeSats have to travel roughly 53 million miles (85 million km). They have already traveled 248 million miles (399 million km).
- MarCO-B's wide-angle camera looks straight out from the deck of the CubeSat. Parts related to the spacecraft's high-gain antenna are visible on either side of the image. Mars appears as a small red dot at the right of the image.
- To take the image, the MarCO team had to program the CubeSat to rotate in space so that the deck of its boxy "body" was pointing at Mars. After several test images, they were excited to see that clear, red pinprick.
- "We've been waiting six months to get to Mars," said Cody Colley, MarCO's mission manager at JPL. "The cruise phase of the mission is always difficult, so you take all the small wins when they come. Finally seeing the planet is definitely a big win for the team."
• August 2018: Mission Concept of Operations. 21)
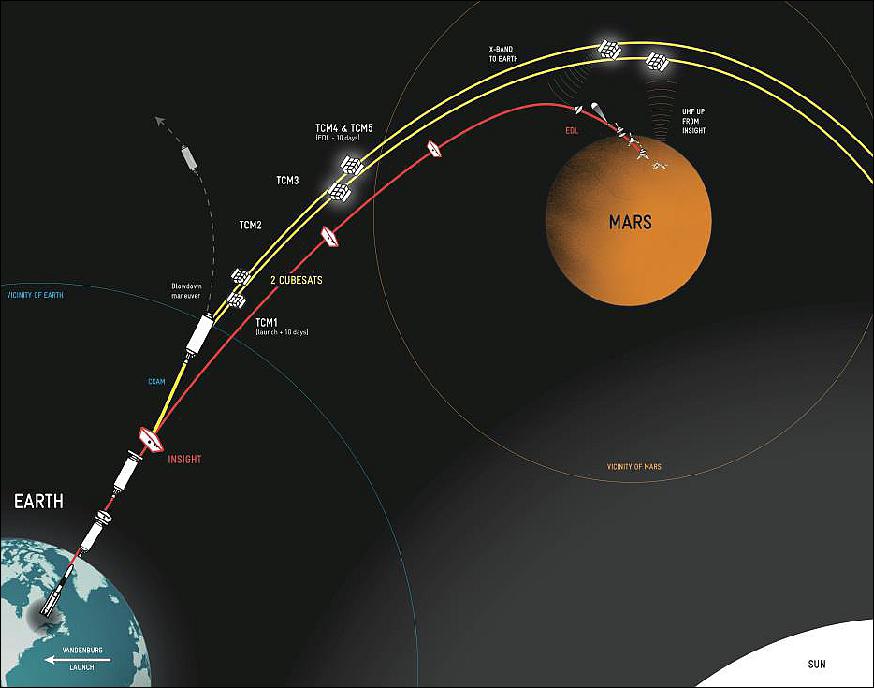
MarCO, like most Mars missions, launched on a trajectory that intentionally aimed away from Mars for planetary protection purposes (this avoids having to decontaminate the entirety of the launch vehicle’s upper stage, a likely impossible task as it is exposed to Earth’s atmosphere). Upon deployment, approximately 90 minutes after launch, and subsequent to InSight’s own launch vehicle separation, the two MarCO spacecraft powered on for the first time since completing dispenser stowage some two months prior.
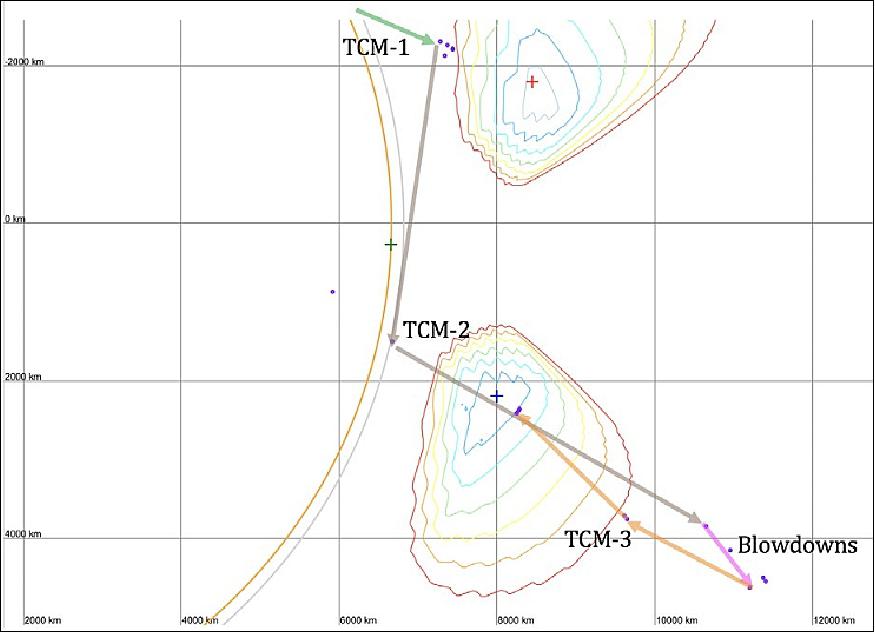
- Early planned mission operations consisted of spacecraft checkout and deployment of panels and antennas. Within several weeks of launch, both MarCO’s were scheduled to perform a TCM (Trajectory Correction Maneuver), steering the flight path toward Mars, and removing the launch vehicle bias. Follow-on TCMs (up to 4 additional) throughout the mission allow for minor correction of the final flyby trajectory.
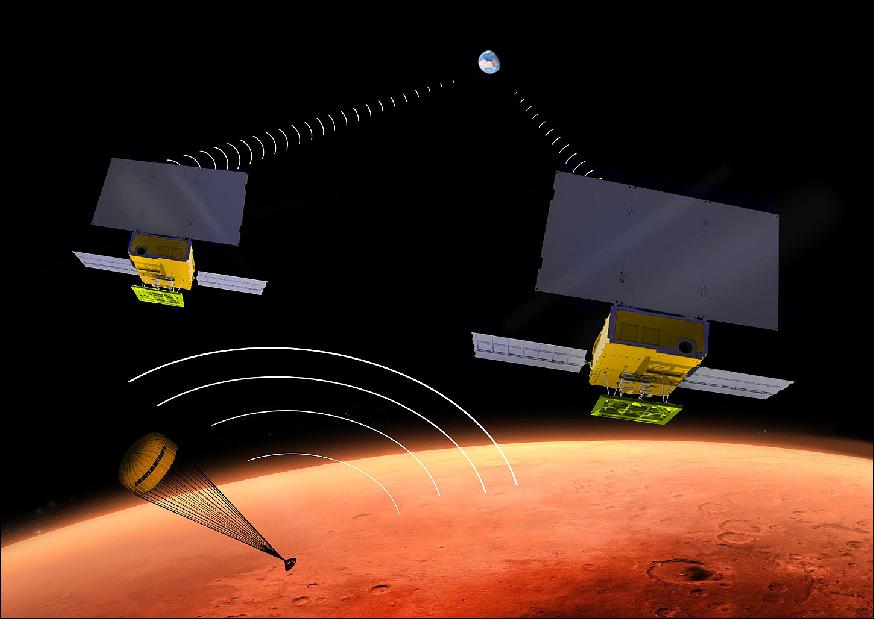
- Following a 6.5-month cruise, and arriving at Mars on November 26, 2018, the MarCO spacecraft are planned to relay telemetry data back from the InSight lander as it proceeds through EDL (Entry, Descent and Landing) to landing on Mars. The Mars Reconnaissance Orbiter will simultaneously record the broad InSight signal (including telemetry data) and will subsequently send this to Earth. During EDL, a UHF carrier tone will be received by Earth, providing limited insight into descent events. Though the MarCO spacecraft are not required for InSight mission success, their presence and operations allow for near-real-time telemetry downlink and health monitoring of the EDL process. - After EDL data relay, the MarCO spacecraft will complete their demonstration objectives and primary mission by mid-December.
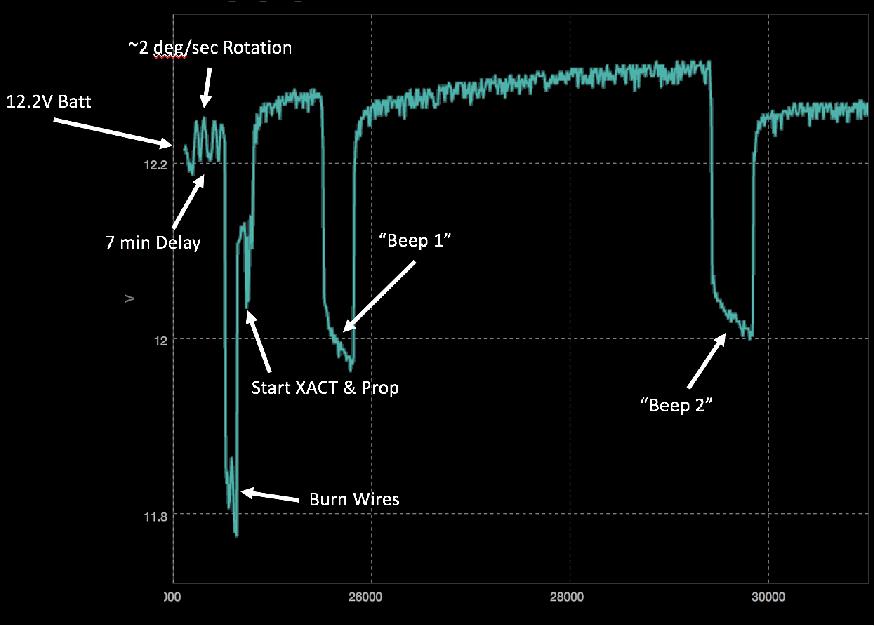
- Deployment: To avoid launch vehicle or primary spacecraft (InSight) interference, each MarCO was inhibited from opening panels or powering on the radio until verification of sun-light measured on the vehicle and at least 5 minutes following dispenser deployment. After this delay, the spacecraft energized each solar array burn-wire circuit three times (for redundancy), and subsequently turned on the attitude control system to despin and orient the spacecraft. Soon after, a scheduled “beep” mode was entered, where the radio began a short duration (5 min) receive-transmit sequence, allowing the ground to receive the first data from orbit. As the spacecraft was designed to enter a sun-pointing spin, it was unclear if the antennas would be pointed correctly during this time. Several minutes later, a second 7-minute “beep” was scheduled.
- Figure 14 best illustrates actual onboard events through annotation of battery bus voltage. Significant drops occur when large loads (such as energizing burn-wires) are applied. As part of the solar arrays are still exposed when stowed, initial tumble rates are also provided.
- Both MarCO-A and MarCO-B successfully completed the initial deployment sequence. MarCO-A had a tumble rate of less than 0.5º/s, while -B was slightly faster at approximately 2º/s. Each spacecraft remained warm from launch, with onboard internal temperatures around 18ºC. Solar panels were successfully actuated upon the first burn-circuit excitation, and initial telemetry indicates they fully deployed.
- Each spacecraft also communicated with ground control during each beep opportunity, providing a first look at the deployment sequence and spacecraft health. Batteries were nearly fully charged at deployment, and subsequent looks indicated a power-positive state. Wheel rates remained low, the star tracker showed good expected performance, and the spacecraft remained in a stable attitude.
- Trajectory Correction Maneuvers: MarCO is pioneering meeting planetary protection requirements within the framework of a CubeSat mission. Classified as a Planetary Protection Category III flyby mission, the project is required to address both impact constraints for launch vehicle elements and the potential for contaminating InSight. Meeting these requirements by adopting the contamination analysis and control architecture typically applied to Mars missions would limit the benefits of the low-cost, highly-adaptable CubeSat paradigm. Instead, a strategy comprising bioassays of specific hardware, conservative bioburden estimation, and worst-case vehicle breakup and burnup analyses was employed to ensure Planetary Protection compliance.
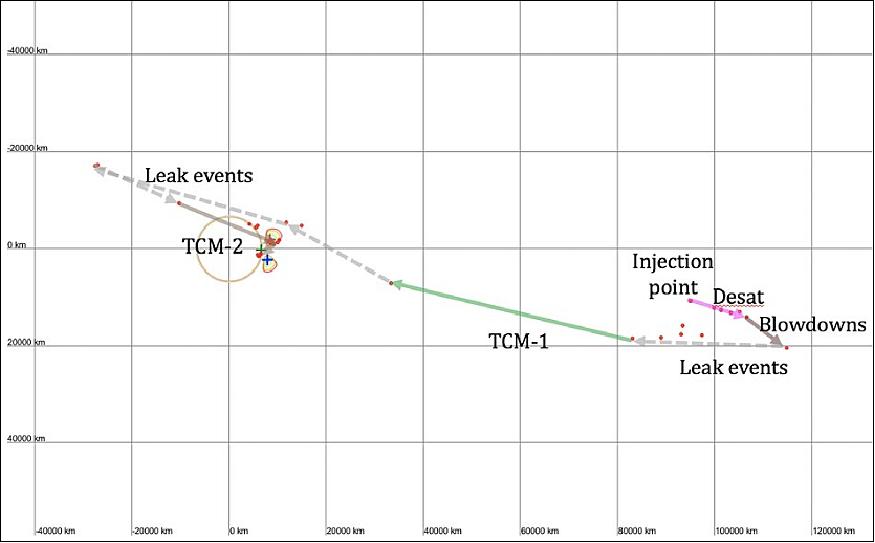
- Yet as the launch vehicle did not (and could not) meet the stringent cleanliness requirements of a Mars impacter, the mission was specifically launched to off-point from Mars. TCMs are used to re-align a spacecraft’s trajectory towards its destination – in this case, to establish MarCO on a heliocentric trajectory that was coincident with a Mars flyby at the time of InSight’s EDL.
- To achieve this goal, up to five TCMs are planned, spread throughout the mission, and biased late to allow for final small adjustment. Small maneuvers early in the mission can account for large changes at the end, so early uncertainty is corrected once additional navigation tracking has been accomplished. To maintain appropriate distance between InSight and the two MarCO spacecraft, the MarCO TCM-1 sequence was performed after InSight, essentially providing the primary spacecraft “first-pick” of preferred flight path. Each MarCO’s TCM was designed to best align for Mars flyby, to maintain the flight path within DSN coverage of InSight (which allows for multiple-spacecraft-per-aperture reception of MarCO data when InSight is being tracked), and to account for any uncertainty in thruster performance.
- The MarCO spacecraft each have an onboard cold-gas propulsion system, capable of achieving greater than 30 m/s of ΔV. Early characterization of this system, both during desaturation maneuvers and a blow-down sequence (to empty the plenum) showed good performance, though slow compared to traditional “burns”. Rather, the spacecraft perform closer to a low-thrust system, with multiple firings happening over minutes to achieve a desired ΔV. This has an inherent advantage, where tracking can occur between various stages, providing additional position estimation accuracy.
- The navigation team at JPL has made use of both ranging and Doppler tracking of the MarCO spacecraft to provide a position estimate. Later in the mission, ΔDOR (Delta-Differential One-way Ranging) tracking will be tested to refine this estimate. Over multiple days of simultaneous data downlink and ranging, each spacecraft’s position was refined.
- In summary, the MarCO spacecraft have now entered cruise phase and are performing well. Initial deployment showed two healthy vehicles at minimal attitude rates, ready for spacecraft checkout. Following checkout, the first TCM maneuver aligned both spacecraft toward Mars, even though MarCO-B continues to account for an ongoing slight propellant leak through a thruster. After a 6.5 month cruise, the MarCO spacecraft will be ready to support InSight during EDL.
- As a technology demonstration mission, the MarCO spacecraft are proving the capability of a low-cost mission to survive and thrive in the deep space environment, and training scientists and engineers in the sometimes difficult world of operations. The limited energy budget available to MarCO causes for short communication passes and careful planning for activities. This can affect how quickly a TCM can occur, how to plan for the downlink of historical data, and how often the thruster system can be utilized. By the time MarCO reaches Mars, the spacecraft will have reached distances half a million times further than most CubeSats to date.
- MarCO – the first interplanetary CubeSats – is blazing a trail for follow-on missions, and many additional lessons will come in the journey ahead.
• June 1, 2018: NASA has achieved a first for the class of tiny spacecraft known as CubeSats, which are opening new access to space. 22)
- Over the past week, two CubeSats called MarCO-A and MarCO-B have been firing their propulsion systems to guide themselves toward Mars. This process, called a trajectory correction maneuver, allows a spacecraft to refine its path to Mars following launch. Both CubeSats successfully completed this maneuver; NASA's InSight spacecraft just completed the same process on May 22.
- While MarCO-A corrected its course to Mars relatively smoothly, MarCO-B faced some unexpected challenges. Its maneuver was smaller due to a leaky thruster valve that engineers have been monitoring for the past several weeks. The leak creates small trajectory changes on its own. Engineers have factored in these nudges so that MarCO-B can still perform a trajectory correction maneuver. It will take several more weeks of tracking to refine these nudges so that MarCO-B can follow InSight on its cruise through space.
- "We're cautiously optimistic that MarCO-B can follow MarCO-A," said Joel Krajewski of JPL, MarCO's project manager. "But we wanted to take more time to understand the underlying issues before attempting the next course-correction maneuver."
- Once the MarCO team has analyzed data, they'll know the size of follow-on maneuvers. Several more course corrections will be needed to reach the Red Planet.
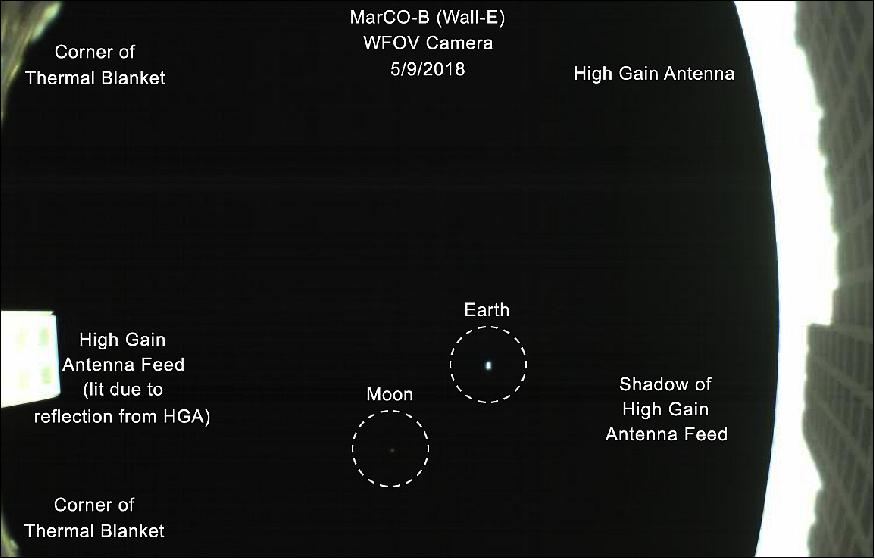
• May 15, 2018: NASA's Voyager 1 took a classic portrait of Earth from several billion miles away in 1990. Now a class of tiny, boxy spacecraft, known as CubeSats, have just taken their own version of a "pale blue dot" image, capturing Earth and its moon in one shot. 23)
- NASA set a new distance record for CubeSats on 8 May when a pair of CubeSats called MarCO (Mars Cube One), reached 1 million kilometers from Earth. One of the CubeSats, called MarCO-B (and affectionately known as "Wall-E" to the MarCO team), used a fisheye camera to snap its first photo on 9 May (Figure 15). That photo is part of the process used by the engineering team to confirm the spacecraft's high-gain antenna has properly unfolded.
- As a bonus, it captured Earth and its moon as tiny specks floating in space. "Consider it our homage to Voyager," said Andy Klesh, MarCO's chief engineer at NASA's Jet Propulsion Laboratory, Pasadena, California. JPL built the CubeSats and leads the MarCO mission. "CubeSats have never gone this far into space before, so it's a big milestone. Both our CubeSats are healthy and functioning properly. We're looking forward to seeing them travel even farther."
- If the MarCO CubeSats make the entire journey to Mars, they will attempt to relay data about InSight back to Earth as the lander enters the Martian atmosphere and lands. MarCO will not collect any science, but are intended purely as a technology demonstration. They could serve as a pathfinder for future CubeSat missions.
• May 05, 2018: NASA has received radio signals indicating that the first-ever CubeSats headed to deep space are alive and well. The first signal was received at 12:15 p.m. PST (3:15 p.m. EST) today; the second at 1:58 p.m. PST (4:58 p.m. EST). Engineers will now be performing a series of checks before both CubeSats enter their cruise to deep space. 24) 25)
After Separation (Ref. 16)
If all goes according to plan, within about 10 minutes after separation from the Centaur, each MarCO will begin to deploy its solar panels. Each MarCO generates electric power with a pair of photovoltaic panels, and each panel has an area of about 30 cm x 30 cm. Combined, these panels can provide each spacecraft about 35 watts when near Earth and 17 watts when near Mars. The power system also will use rechargeable lithium-ion battery cells, crucial for operations when spacecraft orientation for communication prevents the solar arrays from facing the Sun.
After the solar arrays are deployed, the MarCO control team will acquire radio contact with each CubeSat, one at a time, via NASA's Deep Space Network. Early tasks will be to establish that the spacecraft are healthy, stable and commandable.
During the flight to Mars, the MarCO twins will each attempt to deploy a high-gain X-band antenna that is a flat "reflectarray" panel engineered to direct radio waves the way a parabolic dish antenna does. This will allow MarCO to transmit data to Earth from as far away as Mars without needing much power, if the spacecraft works as planned. Two smaller X-band antennas on each spacecraft — one low-gain and one medium-gain — work without needing to be deployed. These will serve for transmissions earlier in the flight and will also receive radioed commands from Earth.
The other deployed antenna is for the MarCO ultra-high frequency (UHF) radio receiver. InSight will be transmitting in UHF during its descent through the Martian atmosphere and from the surface of Mars. Both of the deployed antennas on each MarCO will be in fixed positions after deployment, with the high-gain antenna and UHF antenna facing different directions 90 degrees apart. The MarCOs will also test new technology using a softball-size radio, called "Iris." This radio provides both UHF (receive only) and X-band (receive and transmit) functions capable of immediately relaying information received over UHF, at 8 kilobits per second.
A color wide-field engineering camera on each MarCO will be used to confirm high-gain antenna deployment. The wide-field camera has a 138-degree diagonal field of view. Each MarCO also carries a color narrow-field camera with a 6.8-degree diagonal field of view pointed in the direction of the UHF antenna (the opposite direction from the high-gain antenna). Both cameras can produce images 752 by 480 pixels in resolution.
The team will navigate MarCO-A and MarCO-B separately to Mars with course adjustments along the way. The first of five opportunities for MarCO trajectory correction maneuvers will come about a week after launch.
Each MarCO's attitude-control system combines a star tracker, Sun sensors, gyroscopes and three-axis reaction wheels for monitoring and adjusting orientation. Accelerating a reaction wheel rotates the spacecraft in the opposite direction from the direction the wheel is spinning.
“MarCO is an experimental capability that has been added to the InSight mission, but is not needed for mission success,” said Jim Green, director of NASA’s planetary science division at the agency’s headquarters in Washington. “MarCO will fly independently to Mars."
During InSight’s EDL (Entry, Descent and Landing) operations on Nov. 26, 2018, the lander will transmit information in the UHF radio band to NASA's MRO (Mars Reconnaissance Orbiter ) flying overhead. MRO will forward EDL information to Earth using a radio frequency in the X-band, but cannot simultaneously receive information over one band while transmitting on another. Confirmation of a successful landing could be received by the orbiter more than an hour before it’s relayed to Earth.
MarCO’s radio is about softball-size and provides both UHF (receive only) and X-band (receive and transmit) functions capable of immediately relaying information received over UHF.
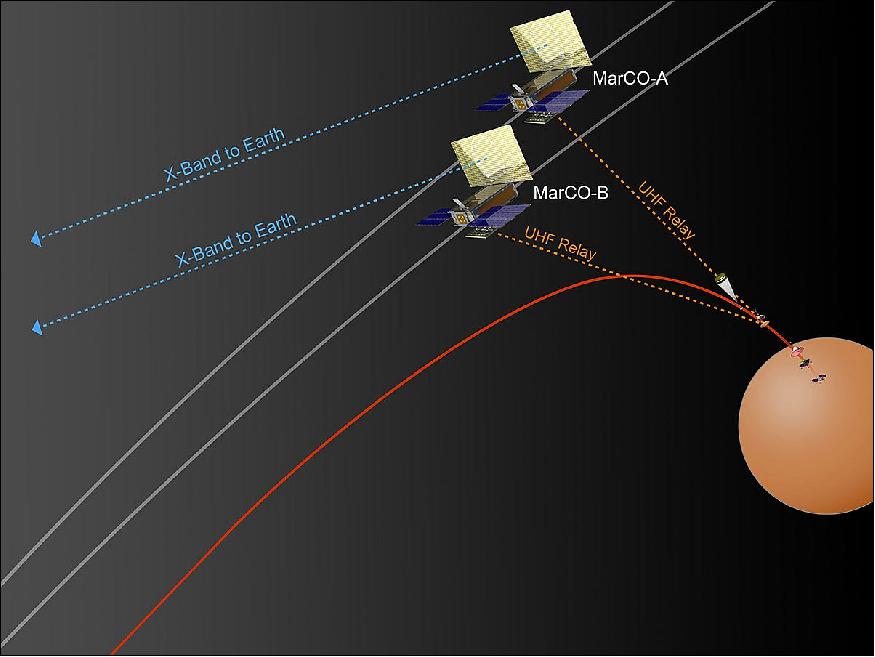
Each MarCO will maintain an orientation with the UHF antenna pointed down toward InSight as it lands on Mars, and the high-gain X-band antenna pointed back toward Earth. In this orientation, the solar panels will not face the Sun, so MarCO will be operating on battery power. InSight will be transmitting its status information at 8 kbit/s over UHF. Each MarCO will attempt to receive that data stream, format it and relay it Earthward in near-real-time to NASA’s Deep Space Network (Figure 19). Since MarCO adds formatting information, as well as a small amount of spacecraft information, to the datastream, the delay is expected to increase as more data are sent from InSight. The delay, however, is not expected to be more than a few minutes. Earth will be oriented so that the information relayed via MarCO will go to the Madrid, Spain, station of the Deep Space Network, from which it will be routed to the InSight mission operations team.
References
1) Sami Asmar, Steve Matousek, ”Mars Cube One (MarCO) Shifting the Paradigm in Relay Deep Space Operations,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, paper: AIAA 2016-2483, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2483
2) Andrew Klesh, Joel Krajewski, ”MarCO: CubeSats to Mars in 2016, Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-III-3, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3180&context=smallsat
3) Dwayne Brown, Guy Webster, “NASA Prepares for First Interplanetary CubeSats on Agency’s Next Mission to Mars,” NASA Release 15-122, June 12, 2015, URL: http://www.nasa.gov/press-release
/nasa-prepares-for-first-interplanetary-cubesats-on-agency-s-next-mission-to-mars
4) “MarCO Mission Overview,” NASA/JPL, URL: http://www.jpl.nasa.gov/cubesat/missions/marco.php
5) Ken Kremer, “First Interplanetary CubeSats to Launch on NASA’s 2016 InSight Mars Lander,” Universe Today, June 15, 2015, URL: http://www.universetoday.com/120837
/first-interplanetary-cubesats-to-launch-on-nasas-2016-insight-mars-lander/
6) ”Mars Cube One (MarCO), Mission Overview,” NASA/JPL, 2018, URL: https://www.jpl.nasa.gov/cubesat/missions/marco.php
7) Tomas J. Martin-Mur, Eric D. Gustafson, Brian T. Young, ”Interplanetary CubeSat Navigational Challenges, 25th ISSFD (International Symposium on Space Flight Dynamics), 19-23 Oct. 2015, Munich, Germany,” URL: http://issfd.org/2015/files/downloads/papers/008_Martin-Mur.pdf
8) Julie Castillo-Rogez, ”CubeSat for Planetary Science and Exploration - Breaking New Grounds,” 2015, URL: https://sites.nationalacademies.org
/cs/groups/ssbsite/documents/webpage/ssb_167850.pdf
9) Courtney Duncan, Amy Smith, ”Iris Deep Space CubeSat Transponder,” CubeSat Workshop #11, Cal Poly San Luis Obispo, 23 April 2014, URL: https://web.archive.org/web/20190716162524/http://mstl.atl.calpoly.edu:80/~bklofas/Presentations/DevelopersWorkshop2014/Duncan_Iris_Deep_Space_Transponder.pdf
10) Nacer E. Chahat, ”New Antennas Will Take CubeSats to Mars and Beyond,” IEEE Spectrum, 25 Jan. 2018, URL: https://spectrum.ieee.org/aerospace/satellites
/new-antennas-will-take-cubesats-to-mars-and-beyond
11) A. Klesh, J. Krajewski, ”MarCO: Mars Cube One – Lessons Learned from Readying the First Interplanetary Cubesats for Flight,” 49th LPSC (Lunar and Planetary Science Conference) 2018 (LPI Contribution No. 2083), paper: 2923.pdf, The Woodlands, Texas, March 19–23, 2018, URL: https://www.hou.usra.edu/meetings/lpsc2018/pdf/2923.pdf
12) ”VACCO ChEMS™ Micro Propulsion Systems,” CubeSat Developers’ Workshop 2015, Cal Poly, San Luis Obispo, April 2015, URL: http://www.cubesat-propulsion.com/wp-content/uploads/2015/10
/VACCO-CubeSat-Propulsion-Systems-Overview-pdf-for-download-page.pdf
13) ”NASA, ULA Launch Mission to Study How Mars Was Made,” NASA/JPL, 5 May 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-089
14) ”NASA Engineers Dream Big with Small Spacecraft,” NASA/JPL,19 April 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-077
15) ”Launch Vehicle,” NASA Mars InSight Mission, URL: https://mars.nasa.gov
/insight/mission/launch-vehicle/
16) ”Mars Cube One Demo - Technology Demonstration - After Separation,” NASA/JPL, 2018, URL: https://www.jpl.nasa.gov/news/press_kits/insight/appendix/mars-cube-one/
17) Andrew T. Klesh, John Baker, Joel Krajewski, ”MarCO: Flight Review and Lessons Learned,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-III-04, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4575&context=smallsat
18) ”Beyond Mars, the Mini MarCO Spacecraft Fall Silent,” NASA/JPL, 5 February 2019, URL: https://www.jpl.nasa.gov/news/news.php?release=2019-017
19) ”NASA Hears MarCO CubeSats Loud and Clear from Mars,” NASA/JPL, 27 November 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-277
20) ”NASA's First Image of Mars from a CubeSat,” NASA/JPL News, 22 October 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-243
21) Andrew Klesh, Brian Clement, Cody Colley, John Essmiller, Daniel Forgette, Joel Krajewski, Anne Marinan, Tomas Martin-Mur, Joel Steinkraus, David Sternberg, Thomas Werne, Brian Young, ”MarCO: Early Operations of the First CubeSats to Mars,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-WKIX-04, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4286&context=smallsat
22) ”NASA CubeSats Steer Toward Mars,” NASA/JPL News, 1 June 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-123
23) ”A Pale Blue Dot, As Seen by a CubeSat,” NASA/JPL News Feature 2018-099, 15 May 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-099
24) ”NASA's First Deep-Space CubeSats Say: 'Polo!',” NASA/JPL, 5 May 2018, URL: https://www.jpl.nasa.gov/news/news.php?release=2018-090
25) ”NASA Hears from MarCO CubeSats,” NASA Feature, 5 May 2018, URL: https://mars.nasa.gov/insight/news/8334
/nasas-first-deep-space-cubesats-say-polo
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status After Separation References Back to top