MiniCOR (Miniature Coronagraph for Interplanetary CubeSat)
Non-EO
NASA-JPL
US (NRL)
Space Weather
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA-JPL, US (NRL) |
MiniCOR (Miniature Coronagraph for Interplanetary CubeSat)
Overview Spacecraft Launch Sensor Complement References
Coronagraphs occupy a unique place in Heliophysics, critical to both NASA and NOAA programs. They are the primary means for the study of the extended solar corona and its short- and long-term activity. In addition, coronagraphs are the only instrument that can image CMEs (Coronal Mass Ejections) leaving the Sun, and thus they provide critical information for space weather forecasting. One of the highest priority recommendations of the recent NRC (National Research Council) Decadal Heliophysics study is to continue spaceborne coronagraphic observation beyond the lifetimes of the current missions with operating coronagraphs, namely SOHO (Solar and Heliospheric Observatory) with a launch on December 2, 1995, and STEREO (Solar-Terrestrial Relations Observatory) with a launch on October 26, 2006.
A U.S. MiniCOR Team, consisting of partners from NRL (Naval Research Laboratory), NASA/JPL, the University of Michigan, and JHU/APL (Johns Hopkins University/Applied Physics Laboratory), is developing a miniaturized coronagraph instrument for a 6U CubeSat mission to obtain observations of comparable quality to those presently obtained by the LASCO (Large Angle and Spectrometric Coronagraph Experiment) C3 coronagraph on SOHO. 1)
The design and mission operations scenario of MiniCOR were specifically tailored to address the requirements of the EM-1 (Exploration Mission-1) interplanetary space flight opportunity described in the NASA ROSES-2014 H-TIDeS (Heliophysics Technology and Instrument Development for Science) program and to meet two specific scientific objectives:
1) Improved measurements of CME kinematics and CME-shock standoff distance
2) Analysis of small-scale structures in the corona and solar wind.
A MiniCOR spacecraft placed at L1 (Lagrangian Point 1) could replace the current C3 coronagraph on SOHO/LASCO. A MiniCOR at L4 and L5 would allow optimal viewing of Earth-directed CMEs.
MiniCOR is a 6Unanosatellite with a tightly integrated, single-instrument interplanetary flight system optimized for science. A single observation will consist of summed images (typically four but up to ten) with on-board cosmic ray scrub, providing a SNR (Signal-to-Noise Ratio) improvement over SOHO of a factor of two to three. The APS (Active Pixel Sensor) will operate continuously using a rolling curtain shutter; images will be recorded onboard for later selection and transmission to the ground. Since MiniCOR is a single-instrument spacecraft, the operating cadence will be enhanced over that of SOHO/LASCO, which shared the data stream with multiple instruments. A minimal 3 months of operation will result in a unique data set to explore the inner heliosphere and provide ample opportunity to demonstrate the performance of the overall observatory. These advantages allow the MiniCOR Team to achieve the two major MiniCOR science objectives.
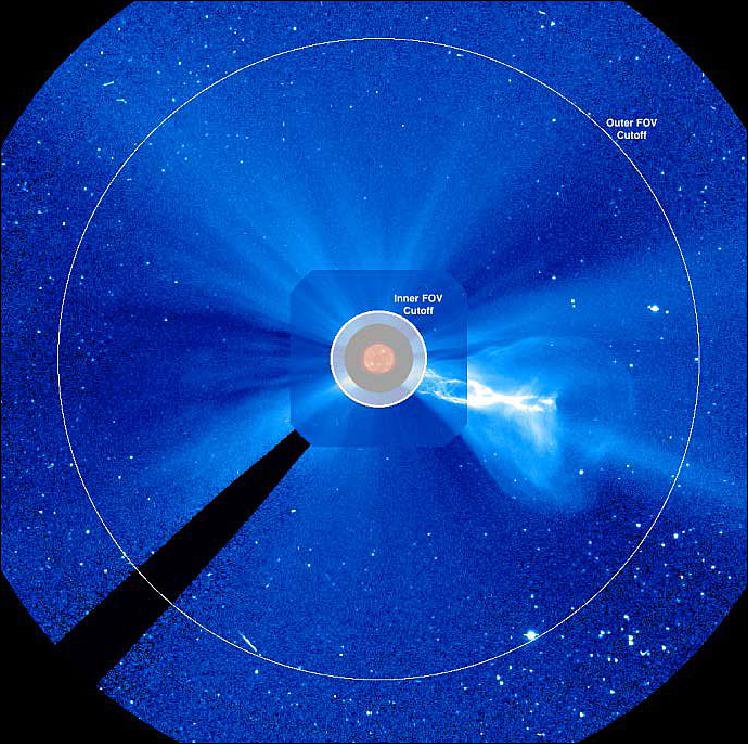
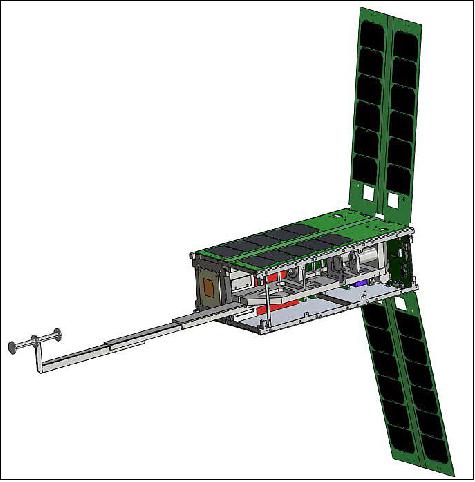
Figure 1 shows the MiniCOR FOV (Field of View) imposed on an image from the SOHO/LASCO coronagraphs C2 and C3 (Rs = solar radius). Figure 2 shows the 6U MiniCOR spacecraft with the solar panels and occulter boom deployed. The MiniCOR coronagraph in the stowed configuration occupies a volume of ~2U, dramatically less than the equivalent of the LASCO C2 and C3 coronagraphs combined volume of 73.4U. The projected mass of the MiniCOR instrument is <3.6 kg, much less than the STEREO COR2 coronagraph mass of ~13 kg. The expected performance of MiniCOR will deliver higher quality data, at a faster cadence (~5 images/hour for LASCO C3 vs. ~15 images/hour for MiniCOR) over 60% of the C3 FOV with a factor of ~10 smaller volume than LASCO C3.
Observing Programs
In Table 1, a set of baseline observing programs is outlined that will return enough science-grade data to satisfy the scientific and technical objectives of the proposed EM-1 mission. The cadences in this table are for the summed images; the observing programs are consistent with the orbit and data rates assumed in the EM-1 proposal. MiniCOR can meet its mission objectives under a variety of telemetry and orbital conditions using a flexible set of electronics.
The MiniCOR camera design is a direct derivative of the NRL (Naval Research Laboratory) WISPR (Wide-Field Imager for Solar Probe Plus) mission camera and has similar capabilities to the cameras of larger instruments, such as LASCO and SECCHI (Sun-Earth Connection Coronal and Heliospheric Investigation) as described in Table 2. To achieve a significant increase in the SNR over present coronagraphs, a typical image will be a sum of four 20 second exposures; onboard inter-comparison among the images will be used to eliminate the cosmic rays and solar energetic particle hits. This allows MiniCOR to overcome one limitation of LASCO when viewing CMEs directed at the spacecraft: the images can be swamped with energetic particle streaks. If pointing and observational considerations allow, the electronics has the capability to sum up to 10 images.
Objectives | Solar Wind Small Scale Structure | CME Kinematics & Standoff Distance | Extended Phase Operations |
Measurement | Power spectra, h-t(height-time) plots of solar wind blobs | h-t plots of CMEs and shocks | h-t plots of CMEs |
Image size (pixels) | 1920 x 2048 | 1920 x 2048 | 960 x 1024 |
Binning | 1 x 1 | 1 x 1 | 2 x 2 |
Compression | 7.6 | 7.6 | 7.6 |
Spatial resolution (arcsec/pixel) | 18 | 18 | 36 |
Cadence (minutes) | 4 | 10 | 15 |
Total daily data volume (MB) a) | 430 | 194 | 33 |
Average downlink rate (kbit/s) b) | 425 | 193 c) | 21 |
Data rate capability (kbit/s) b) | 400-3000 | 100 | >20 |
Mission days | 0-20 | 0-100 | 100-150 |
Legend to Table 1:
a) Includes 5% CCSDS packer overhead, housekeeping telemetry at 1 min cadence, and a 15% overall margin
b) Two 8-hr downlinks with a 34m DSN antenna per week
c) Required rate to downlink full weekly dataset. Only specific event data will be downloaded to fit the downlink capability
Technology Overview
To achieve MiniCOR's primary goal of operating a low-cost miniaturized science-grade coronagraph in deep space within the constraints of an EM-1 mission, we have designed a tightly integrated 6U sciencecraft that combines a science-grade 2U coronagraph with sophisticated miniaturized systems for attitude control, deep space communications and other subsystems.
To achieve world-class performance in a 2U package, the MiniCOR coronagraph design has excellent optical performance, a small deployable (60cm) boom and incorporates a next generation APS (Active Pixel Sensor) detector. A comparison of MiniCOR's coronagraph to previous instruments is given in Table 2.
MiniCOR will fully exploit the unique APS electronic shutter, the 16 GB memory storage and a superb spacecraft pointing capability to obtain an inner Heliospheric dataset with unprecedented sensitivity and temporal resolution. With a factor of 2.9 improvement in light gathering power over SOHO and quasi-continuous data collection, the MiniCOR observations will observe the slow solar wind, coronal mass ejections and shocks in the inner Heliosphere with sufficient SNR to open new windows on our understanding of the inner Heliosphere. Three months of operations would result in a unique data set to explore the inner Heliosphere and provide ample opportunity to demonstrate the performance of the overall observatory. The MiniCOR team uses the high heritage Iris radio from NASA/JPL ( Jet Propulsion Laboratory), combined with a fixed patch antenna and two eight- hour DSN passes per week, to meet the operational downlink and uplink requirements. A large 16 GB onboard data store allows storage and selective downlink of the nearly continuous coronagraph observations.
Coronagraph | SOHO C2 | SOHO C3 | STEREO SECCHI/COR2 | MiniCOR |
FOV (Field of View) Rs | 2.5-6 | 4-30 | 2.5-15 | 2.5-20 |
External occulter to objective lens distance (mm) | 821 | 320 | 600 | 600 |
A1 to detector distance (mm) | 714 | 570 | 635 | 378 |
Entrance aperture diameter (mm) | 19 | 9 | 34 | 20 |
Focal length (mm) | 388 | 77.6 | 120 | 115 |
Bandpass | C2 orange filter (540-640 nm) | C3 clear filter (400-850 nm) | 660-740 nm | 475 – 750 nm |
Plate scale (arcsec/pixel) | 11.6 | 58 | 14 | 19 |
Detector | Front side illuminated | Front side illuminated | Back side illuminated E2V 2048 x 2048 CCD | Front side illuminated SRI 1920 x 2048 APS |
Light gathering power relative to C3 incl. detector correction | 1.0 | 1.0 | 7.6 | 2.9 |
Standard Observing Program | Cadence: 12 min | Cadence:12 min | Cadence: 10 min | Cadence: 4, 10 min |
Spacecraft
The MiniCOR mission will leverage extensive heritage from previous successful missions with a team experienced in multiple CubeSat missions and launches. The ACS (Attitude Control Subsystem) is a key enabler for this mission. Two additional fundamental enablers are the communication subsystem, capable of deep space communications and tracking, and the propulsion subsystem for attitude control.
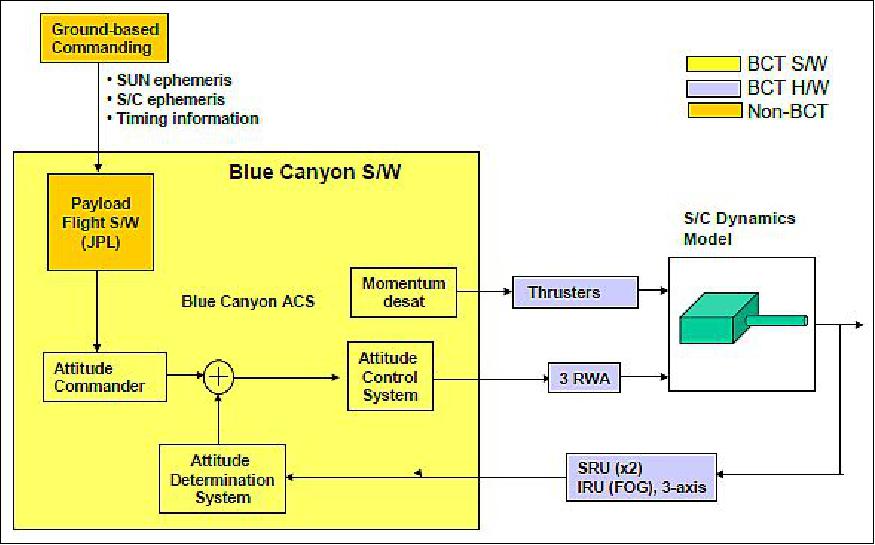
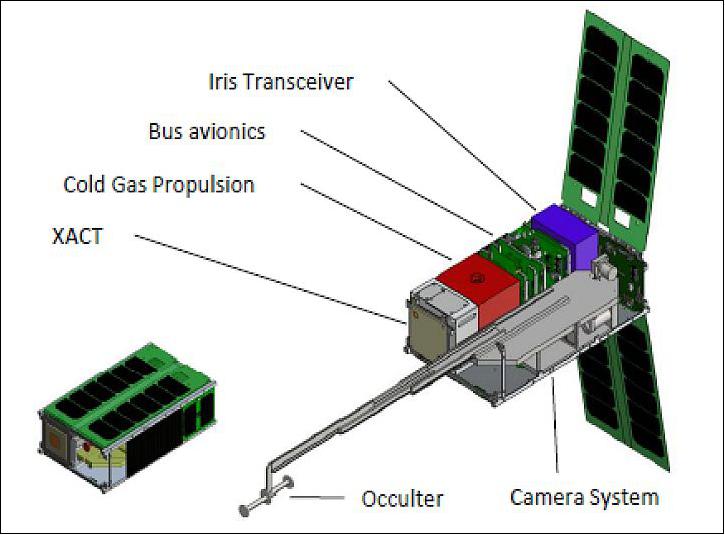
ACS: The ACS architecture for MiniCOR is based on a standard 3-axis control configuration shown in Figure 3. The ACS hardware and software are provided by BCT (Blue Canyon Technologies) with the BCT XACT (eXact Attitude Control Technology) package. The ACS hardware consists of two star trackers mounted orthogonally, a 3-axis gyro, and 3 reaction wheels. Each tracker (BCT nano-Star Tracker) is accurate to 6 arcsec with a NEA (Noise Equivalent Angle) of 3 arcsec. The MEMs gyro that comes standard with the BCT bus is replaced with a fiber-optic gyro, which has better bias and short-term stability. The short term stability of this fiber-optic gyro is absolutely critically to obtain the performance of the MiniCOR pointing system. Each of the 3 reaction wheels (BCT RWp15) has 15 mNms momentum storage and a torque of 0.6 mNm . Accumulated reaction wheel momentum is offloaded using a separate thruster-based system, which serves double-duty to remove tip-off rates. Expected pointing performance is summarized in Table 3.
The optical resolution of the instrument is <36 arcsec rms. The root sum square of the pointing expected performance contribute 0.33 arcsec to the overall point spread function. The pointing performance stability can substantially exceed the requirement (up to ~60 arcsec) and still maintain comparable imaging performance to LASCO C3.
Parameter | Requirements | Expected performance |
Accuracy | 60 arcseconds | 52 arcseconds |
Stability over 20 second exposure | 10 arcseconds | 4.96 arcseconds |
Table 3: MiniCOR ACS requirements and expected performance | ||
Pointing Stability: JPL has conducted extensive analysis of the pointing stability. The ADS stability is analyzed assuming that star trackers and gyros are combined using an optimized estimation filter. The filter is designed to offer the best balance of low- and high-frequency noise smoothing based on fast-observer theory. The LOS (Line-of-Sight) rotates at an attitude rate of about 1º/day due to orbital motion about the sun. The stability performance of the resulting ADS estimate is scored over an ACS bandwidth of 0.5 Hz, and over time windows of 20 s duration that is consistent with the intended exposure time. The reaction wheel disturbances produce most of the high-frequency errors. Due to the lack of detailed data on the Blue Canyon RWp15 reaction wheels, the pointing is analyzed using the comparable MAI-200 ADACS reaction wheels (CubeSatShop.com). The reaction wheel induced disturbances are scored over time windows of 20 s duration, consistent with the intended MiniCOR exposure time, and multiplied by a factor of 10 arcsec margin against unmodeled dynamics. A control error of 1 µrad is allocated to cover control errors in excess of the knowledge error. The results indicate that MiniCOR's stability requirement of 10 arcsec is met with a value of 4.96 arcsec, yielding a 49.6% margin.
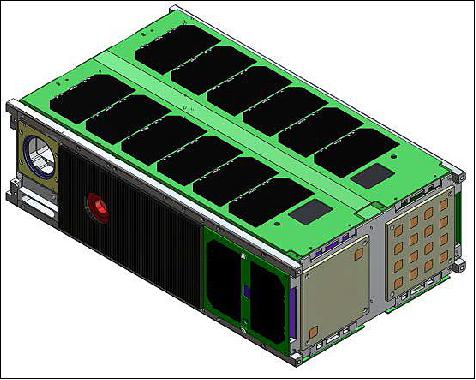
Structure: The 6U CubeSat structure is a modular 10 cm x 10 cm x 34 cm exoskeleton frame developed by the MXL (Michigan Exploration Laboratory). It is aluminum with hard anodized rails. 6U P-POD deployers are still in work and the structure will be adapted to the relevant launch mechanism used. Two rigid sidewalls have four P-POD interface railings that extend along the 34 cm edge. Modular rails connect the sidewalls to complete the exoskeleton. The frame provides standard mounting surfaces for the core bus technology as well as flexible payload mounting options.
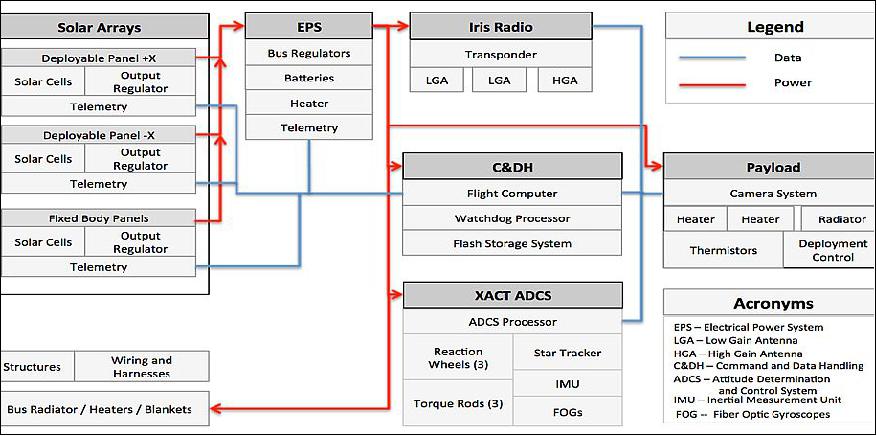
A block diagram of the proposed CubeSat hardware is shown in Figure 4. The deployed and stowed spacecraft configurations are shown in Figure 4. Table 3 gives the estimated mass and power of the major spacecraft subsystems with totals compared to capability. Ample mass and power margins allowed for considerable growth during the MiniCOR development program.
C&DH (Command and Data Handling): The C&DH subsystem of MXL provides the spacecraft with the necessary central processing and data storage capabilities, for both the flight system and science data. The C&DH data storage subsystem can handle >16 GB of data on discrete flash and SD-card based flash memory. MiniCOR can store up 28 days of continuous observations onboard.
The resources required for payload commanding are minimal. A specialized command set provides control of payload deployment and heaters. Low-level binary commands are passed to the payload for imaging configuration. Additional commands place the payload into flight mode, safe mode, test mode, and off mode. The C&DH has a combination of low-power embedded processors based on the Texas Instrument MSP430 and a high speed Atmel AT91SAM9G20 processor, running at 400 MHz with 128 MB of static random-access memory, and 512 MB of NAND flash memory. The C&DH communicates to other subsystems with inter-integrated circuits (I2C) buses, serial peripheral interface buses, and dedicated universal asynchronous receiver/transmitter connections.
An independent hardware "watchdog" system monitors the C&DH performance and power-cycles the flight system if necessary. It also can receive direct commands through the transceiver for power cycling. The watchdog system itself is periodically power-cycled by a HEF4521B timer to clear transient faults. Fault protection is also implemented with a redundant SD card and current-limiting hardware in the power subsystem and payload module.
The MXL flight software and procedures are derived from previous UM (University of Michigan) missions that have analogous hardware and payload interfaces such as M-Cubed and GRIFEX. About 50% of the software is directly inherited. The operating system is Linux (2 MB); the C&DH routines (6 MB) are a collection of C and scripted language applications that run the satellite. This flight software easily fits in the available storage in the C&DH. Modified code and executables can be uploaded to the satellite on orbit.
PIM (Payload Interface Module): The PIM provides a custom interface between the C&DH and the payload. The primary interface to the payload is a synchronous serial interface that enables 1–2 Mbit/s data and command transfers. Four analog voltage lines from the payload enable temperature monitoring by the C&DH through the PIM. The unregulated battery voltage, 3.3 V, and 5.0 V bus voltages are provided to the payload through current-limiting and current-monitoring switches. Supplemental voltages are provided for the detector electronics as required. The switches shut off during current spikes. This provides protection against transient single event upsets and the capability to completely power cycle the payload. Isolation circuitry (using standard Texas Instruments isolation chips) prevents improper current back flows and any voltage level shifting. This enables the payload to be powered off and electrically isolated from the bus (the grounds are still connected).
EPS (Electrical Power Subsystem): The EPS combines solar cells and batteries to provide power under worst-case conditions. Two deployable solar panels are released with a spring and hinge mechanism to a fixed angle set with a customized hinge- stopping bracket. The angle, the only design change between the two solar panels, is optimized prior to launch for the chosen orbit. There are four body-mounted panels as well to provide power during maneuvers and detumbling post launch. Each solar panel has twelve EMCORE third generation triple junction (ZTJ) cells with 29.5% efficiency strung in series on each side. The panels each have an independent buck regulator to provide power conversion to the bus voltage and track peak power production. A breakdown of the power budget is given in Table 4. During high current consumption modes (e.g., DSN contacts), a battery system provides supplemental power. Four Panasonic 18650 lithium ion cells store 6,200 mAh at 8 V. Power is distributed to the satellite through low-noise, low-ripple bus regulators at 3.3 V and 5.0 V. Voltages, currents, temperatures, and efficiencies of all regulators are monitored. Bus voltages are distributed to all subsystems and, as necessary, local point-of-load regulators. The buses and subsystems are switchable (on/off) and current-limited.
Subsystem | Mass (kg) | Power (W) |
Payload | 3,00 | 3.5 |
ADCS (XACT, FOG) | 0.78 | 0.66 |
Cabling/harness | 0.1 | 0 |
Propulsion | 1.1 | 0.53 |
EPS (Electrical Power Subsystem) | 0.28 | 0.2 |
Spacecraft structure | 0.48 | 0 |
TCS (Thermal Control Subsystem) | 0.15 | 2 |
Total | 7.49 | 13.9 |
Total with contingency | 8.83 | 18 |
Capability | 14.0 | 24 BOL (Beginning of Life) |
TCS (Thermal Control Subsystem): Thermal control is required for proper payload operation and heat management from the Iris radio. The payload requires an operating range of 0-40°C. A dedicated passive radiator is used to cool the APS (-55 to -75 °C) to its operating temperature. The present design includes active thin film payload structural heaters (2 W), detector trim (0.25 W) heaters and decontamination heaters (5 W). A radiator will dump excess heat from the payload. A 9 cm x 18 cm radiator will be attached as a thermal sink for the Iris radio. The 18 W of surplus heat will be removed from the satellite with the radiator to maintain nominal temperatures. Thin film heaters attached to the Iris radio enclosure will provide heat if necessary.
RF communication subsystem: The Iris radio from JPL, coupled to a high gain antenna and two low gain antennas, will provide high and low rate communication and tracking in the near Earth and deep space environment. A link budget with appropriate performance margins was developed.
Iris radio: The MiniCOR design incorporates the second-generation Iris radio from JPL which is deep-space and CubeSat compatible. The first version was developed for JPL's INSPIRE (Interplanetary NanoSpacecraft Pathfinder In a Relevant Environment) "First CubeSat to Deep Space" mission and delivered to that project, ready for flight, on June 30, 2014. DSN (Deep Space Network) compatibility was formally verified at the DSN Test Facility 21. This transponder operates on any channel in the deep space or near Earth X-band (downlink 8.4 – 8.5 GHz) providing an uplink at 1000 bit/s BPSK modulation on a 16 kHz subcarrier with FireCode (spacecraft reset) support and downlinks in the range 62.5 to 25,600 bit/s on subcarriers (nominal 25 kHz, others available) or direct on carrier, with or without residual carrier for navigation purposes. Iris provides navigation support through the Doppler data type, coherently reproducing the uplink frequency and phase at the standard X-band 880/749 turnaround ratio. It also supports the ranging data type by non-regeneratively transponding ranging tones or codes within a 1.5 MHz bandwidth. The Iris for INSPIRE was built with COTS (Commercial Off- the-Shelf ) parts for a nominal 90 day mission up to a few million km from Earth. Iris supports two sets of transmit and receive antennas and has a mass of 0.4 kg.
A significant revision of the Iris transponder is now under way to produce a "Version 2 (V2)" unit that is suitable for longer duration missions, up to 2.5 years, in deep space through radiation hardening, improved power input to radio power output efficiency, better thermal design, and additional signaling features such as Delta-DOR navigation support and a larger selection of uplink command rates. The resulting V2 transponder will put out 2 W of RF power and feature a receiver sensitivity of better than -125 dBm. The DC power input for full transponding will be 20 W or less with lower power receive-only modes available. The stack is approximately 0.4U (9.1 x 9.8 x 4.0 cm).
The Iris V2 transponder includes two LGA (Low Gain Antenna) boards with approximately hemispherical coverage that can be placed on diverse locations on the spacecraft exterior. Each LGA board has one "receive" and one "transmit" antenna. The two transmit and two receive paths can also be configured to be used with MiniCOR's HGA (High Gain Antenna). Figure 6 shows the HGA and one set of the hemispherical LG "receive" and "transmit" antennae.
High Gain Patch Antenna Array: A patch antenna array on the rear of the satellite will provide sufficient link margin for high rate communication at expected distances. The array is approximately a 100 cm2 patch 15 dB X-band antenna with 16 ~1 inch patches as shown in Figure 6. It will be provided by Antenna Development Corporation. During DSN passes, the high gain antenna would be pointed directly to Earth.
CGPS (Cold Gas Propulsion Subsystem): The momentum unloading system chosen for MiniCOR is a cold gas thruster that uses an additive manufacturing (3D printed) tank. The thruster is the same design that is being flown on JPL's INSPIRE mission (hereafter referred to as the INSPIRE thruster) which was developed at UTA (University of Texas at Austin). The propulsion system uses an inert liquid refrigerant as a propellant that provides simple, low cost, and safe operation. The 3D printed tank can be easily reconfigured into various shapes and volumes, making efficient use of the volume on CubeSats.
Launch
The MiniCOR nanosatellite has currently no identified launch opportunity. But the project is confident in obtaining a launch. The EM-1 (Exploration Mission-1) interplanetary space flight mission with the first SLS (Space Launch System) is planned for 2018 to fly to the Moon and beyond.
Sensor Complement
MiniCOR (Miniature Coronagraph)
The payload, namely the miniature coronagraph, has the same name as the mission. The MiniCOR optical layout follows the design principles successfully used in developing the previous NRL coronagraphs. The optical prescription most closely follows the SECCHI/ COR2 instrument layout as presented in Table 2. The optical layout is described in Figure 7. Two folding mirrors are required to meet the highly constrained volume requirements. The MiniCOR instrument FOV and the distance to the external occulter are nearly identical to those of SECCHI COR2. The project expects to reach similar or better stray light (~3 x 10-11 B/Bsun where B is brightness) in MiniCOR as achieved in the SECCHI instrument. The deployable boom design will closely follow the design of previous deployable booms constructed by NRL for the Solwind, OSO-7 and previous sounding rocket coronagraphs. The design is readily manufactured with modest tolerances for a reasonable cost.
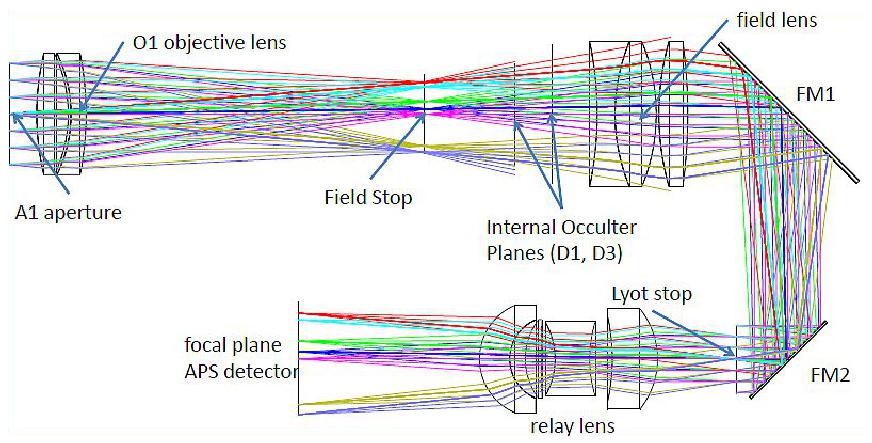
Legend to Figure 7: The residual diffracted radiation at the A1 edge remains a significant source of stray light. A field lens (O2) is placed directly behind the coronagraph field stop and internal occulter. O2 produces a high quality image of the A1 plane at the A3. The Lyot stop is placed in this plane to intercept the bright residual diffraction from the edges of the A1 aperture. If necessary, the MiniCOR team will intercept the doublet ghost (Lyot spot) at a point near this plane to maintain adequate stray light rejection. The relay lens (O3) re-images the coronal scene onto the APS detector. A combination of long pass and short pass filters will be incorporated into the relay lens to define the instrument bandpass of 475 to 750 nm. The expected MiniCOR image quality (~50 arcsec FWHM) is a significant improvement over the C3 Nyquist limit of 120 arcsec.
Expected stray light suppression: The MiniCOR design is a traditional externally occulted Lyot coronagraph extending from the inner limit at 2.5 Rs to the outer limit at 20 Rs. A coronagraph is a relatively simple telescope with the added complexity of several apertures and stops to eliminate sources of stray radiation. As shown in Figure 7, the MiniCOR optical design includes the necessary re-imaging of the EO (External Occulter) and the aperture A1 at the internal occulter and Lyot stop respectively, which allows removal of these instrumental stray light sources.
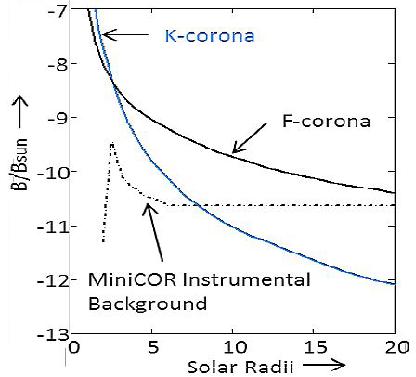
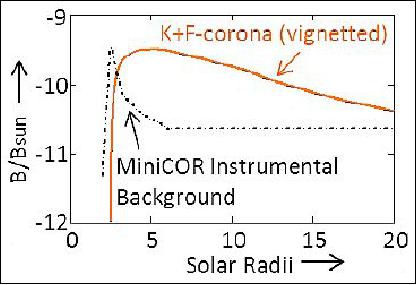
As shown in Figure 8, the detection of the K-corona (solar) signal in the visible region of the spectrum is background noise limited by the F-corona (dust) beyond 2.5 Rs. Externally occulted K-coronagraphs operating in the visible are designed to suppress the instrumental background below the unavoidable F-corona background. The instrumental background in the inner field of view is controlled primarily by the occultation subsystem. The MiniCOR and the SECCHI/COR2 solar occultation subsystems are comparable (Table 2), with the most critical subsystem parameter, the IFOVCO (Inner FOV CutOff), at 2.5 Rs for both sensors. Thus the MiniCOR inner field of view background should be comparable to COR2. The COR2 occultation background was measured pre-launch over the 2.0-6.0 Rs half field interval. The project used the measured COR2 background, corrected for EO-A1 separation, for the MiniCOR instrumental background prediction shown in Figure 8. At the focal plane, this level of stray light suppression is below the ambient K+F-corona and will not significantly affect the coronal observations as shown in Figure 9.
Boom description: The boom design follows the successful deployable boom used for the Solwind, OSO-7 (Orbiting Solar Observatory-7) satellites and rocket-borne coronagraphs. Release will be accomplished with a pin-pulling paraffin actuator driven by the spacecraft electronics system. Each section will be pulled into its appropriate position with a constant force spring. Precision hardened steel locating pins will position each stage precisely. The stages will be driven along lubricated (Braycote), hardened steel rails. Caged, linear roller bearings will provide the necessary transitioning. A total error build-up of <0.5 mm translation and <4 arcmin relative tilt have been allowed in the optical tolerance stack. A mechanical model will be constructed early in the program to retire residual risk.
APS (Active Pixel Sensor)
The MiniCOR detector will be a1920 x 2048 format, 10 µm pitch 5T scientific grade APS using a single die WISPR package. The detector die was fabricated in a dedicated lot run at the TowerJazz foundry for the SoloHI (Solar Orbiter Heliospheric Imager) and SPP/WISPR (Solar Probe Plus/ instruments, both under development at NRL. 2) - These detectors are ideally suited to the CubeSat application. The detector electronics require low operational power (<200 mW operational), drive voltages ranging from -0.5 to 3.3 V and the detectors include a built-in double correlated sample and hold capability. The devices are linear to within 1% over most of the 90,000 photoelectron dynamic range. The expected read noise is ~14 electrons (3σ) at high gain and will not affect the coronagraph data. The device MTF (Modulation Transfer Function) has been measured and is at the theoretical limit.
MCE (MiniCOR Camera Electronics)
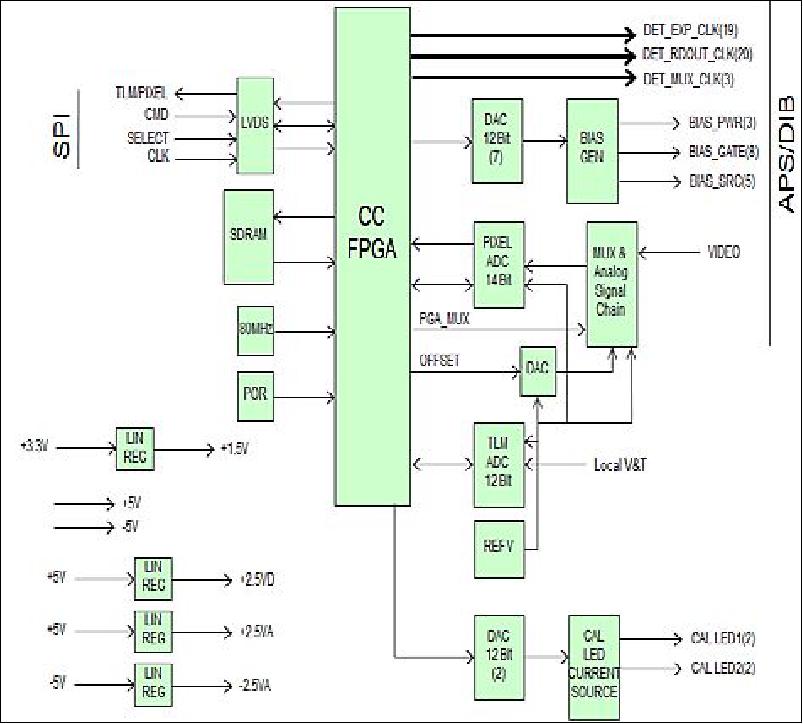
The MCE provide the functionality to read the 1920 x 2048 APS detector at 2 Mpixels/s, perform CRF (Cosmic Ray Filtering) on each image acquired, perform image summing of up 10 images, and provide image compression of the summed image. As shown in Figure 10, the MCE provides a straightforward power and digital communication interface (2 Mbit/s with SPI format) to the CubeSat bus and payload. The baseline approach is to use a H-compress algorithm implemented within the FPGA to do image compression using 64 x 64 pixel blocks. The MCE can also bin pixels within a scrubbed summed image. The MCE will consist of a FPGA with a LVDS SPI interface and +3.3 and ±5 V voltage supply interface to the CubeSat bus. Local supplies of +1.5 V and ±2.5V will be generated by the MCE.
The APS detector interface with the MCE baseline consists of using an existing rigid-flex DIB (Detector Interface Board) assembly. Micro-coded logic controls the readout timing of the APS detector clock signals and video digitization. A 14 bit ADC (Analog Digital Converter) will allow the dynamic range of the APS detector to be fully exploited. Micro-power DACs (Digital Analog Converters) provide programmability of bias APS detector bias levels, video signal chain offset and calibration LED levels. Local analog telemetry is acquired and provided to the spacecraft in response to received command. The overall design of this card is very similar to the camera electronics presently under development for WISPR and SoloHI. The expected dissipated power of the camera electronics card is <3.5 W.
In summary, the MiniCOR design shows that: (1) existing instrumentation for space weather can be miniaturized and still give performance comparable to previous instrumentation and, (2) capable interplanetary CubeSat platforms meeting rigorous performance requirements can be designed. If successfully demonstrated, there are significant implications for NASA's future research and mission strategies. Imaging telescopes could be accommodated on almost any conceivable spacecraft platform and mission design because their resource allocations (volume, power, mass) will be on par to those of in-situ instruments. The cost of instrument development may be significantly reduced, especially when the science objectives do not call for breakthroughs in spatial resolution or image cadence.
This would be particularly beneficial for operational or research-to-operations mission concepts. There exist several mission concepts where the new science relies on the unique vantage point (e.g., Solar Polar Imager or a mission to the L5 Lagrangian point) and not on high spatial resolution or cadence. On the other hand, such unique vantage points impose severe restrictions on instrument mass and power and therefore, instrument concepts such as MiniCOR can enable such missions.
A small spacecraft similar to MiniCOR could be part of a constellation of small satellites achieving the goals of existing larger mission concepts, such as the L5 Space Weather Sentinel Concept described in the report "Small Satellites: A Revolution in Space Science." 3) - Finally, operational applications of CubeSat and small satellite introduce the need for a family of commercial CubeSat components using a higher grade of parts, quality assurance and incorporating significant life testing.
References
1) Clarence Korendyke, Damien Chua, Russell Howard, Simon Plunkett, Dennis Socker, Arnaud Thernisien, Paulett Liewer, David Redding, James Cutler, James Forbes, Angelos Vourlidas, "MiniCOR: A Miniature Coronagraph for Interplanetary CubeSat," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-XII-6, URL of paper: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3246&context=smallsat , URL of presentation: http://digitalcommons.usu.edu/cgi/viewcontent-cgi?filename=0&article=3246&context=smallsat&type=additional
2) Clarence M. Korendyke, Angelos Vourlidas, Simon P. Plunkett, Russell A. Howard, Dennis Wang, Cheril J. Marshall, Augustyn Waczynski, James J. Janesick, Thomas Elliot, Samuel Tun, John R. Tower, Mark Grygon, David Keller, Gregory E. Clifford, "Development and Test of an Active Pixel Sensor Detector for Heliospheric Imager on Solar Orbiter and Solar Probe Plus," Proceedings of SPIE, Vol. 8862, Solar Physics and Space Weather Instrumentation V, San Diego, CA, USA, Oct. 7, 2013, doi:10.1117/12.2027655
3) "Small Satellites: A Revolution in Space Science," Keck Institute for Space Studies, July 2014, URL: http://www.kiss.caltech.edu/study/smallsat/KISS-SmallSat-FinalReport.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Sensor Complement References Back to Top