NEOSSat (Near-Earth Object Surveillance Satellite)
Non-EO
CSA
Space Situational Awareness
Quick facts
Overview
| Mission type | Non-EO |
| Agency | CSA |
| Launch date | 25 Feb 2013 |
NEOSSat (Near-Earth Object Surveillance Satellite)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
NEOSSat is a Canadian microsatellite mission, jointly funded by CSA (Canadian Space Agency) and by DND/DRDC (Department of National Defence/Defence Research and Development Canada). A 'Supporting Arrangement' between CSA and DND was signed on February 24, 2005. In addition, a JPO (Joint Project Office) was set up by DRDC and CSA to manage the NEOSSat design, construction and launch phases. The NEOSSat mission builds upon the demonstrated effectiveness and success of CSA's highly successful MOST (Microvariability and Oscillation of Stars) astronomy microsatellite mission, launched on June 30, 2003 and still in operation in 2011 after > 8 years on orbit, providing world-class science. 1)
The overall objectives of the mission are: 2) 3) 4) 5) 6) 7) 8) 9) 10)
1) To discover and determine the orbits of NEOs (Near-Earth Objects) that cannot be efficiently detected from the ground. After discovery of asteroids and/or comets, this involves in particular the monitoring of their trajectories.
2) To demonstrate the ability of a microsatellite to produce useful metric (position/time) data on man-made, Earth-orbiting objects in the altitude range of 15,000 and 40,000 km
3) To carry out a flight demonstration of the CSA's first MMMB (Multi-Mission Microsatellite Bus). The development of an affordable multi-mission bus for Canada is a stated goal of CSA.
The NEOSSat project was started in 2005 and has passed through a competitive bidding process that resulted in the NEOSSat Phase B/C/D development contract award in July 2007 to an industrial team led by MSCI (Microsat Systems Canada Inc), Mississauga, Ontario, a private company formed from the former Space Division of Dynacon. The CDR (Critical Design Review) was held in April 2009.
The NEOSSat spacecraft will deploy an optical telescope of 15 cm aperture, to detect objects down to 20th V magnitude.
The DND's basic interest is the surveillance of space mission debris in the MEO (Medium Earth Orbit) and GEO (Geostationary Earth Orbit) regions; this is referred to as HEOSS (High Earth Orbit Space Surveillance), while the CSA's asteroid tracking mission is referred to as NESS (Near Earth Space Surveillance). The NEOSSat mission will be used for 50% of its operating time to observe the inner portion of the solar system to discover, track and study asteroids. The other 50% of its operating time will be dedicated to tracking satellites and debris in high Earth orbit to update their orbit parameters.
NESS (Near Earth Space Surveillance) mission:
Earth orbits in a transient "cloud" of asteroids that have been perturbed from the Main Asteroid Belt. This population is estimated to be comprised of ~100,000 asteroids >140 m in diameter orbit, many of them on Earth-crossing orbits. Although most will impact the Sun or be ejected from the Solar System, a few percent of these objects will eventually impact the Earth.
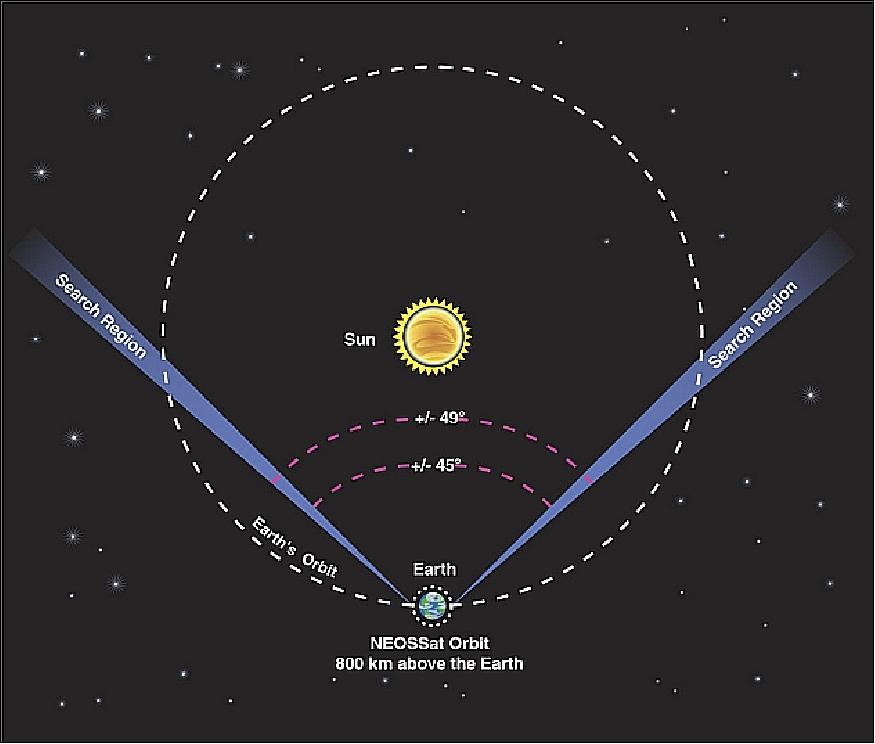
The NESS project will use NEOSSat to complement the international effort to discover this near-earth population by searching the sky as close to the Sun as its microsatellite custom baffle design allows (with minimal alterations to the Maksutov telescope design validated by the MOST spacecraft of CSA). The technological limit was judged to be a 45º solar elongation, and meeting this specification for stray light rejection has proven challenging for a microsatellite compatible baffle design. Deriving from this capability, NEOSSat will search an area from 45º to 55º solar elongation along the ecliptic plane and tentatively ± 40º in ecliptic latitude. The observation strategy will be optimized based upon recent models of the NEA (Near Earth Asteroid) population.
This solar elongation range is challenging for ground-based telescopes as observing capability decreases as air mass increases at low altitudes and only brief windows of observing opportunity exist near the Sun as the Earth rotates through 15º every hour. However, ground-based telescopes will be used when possible to do astrometric follow-up for orbit determination of the NEOSSat discovered objects (to free the NESS spacecraft observing time for discovery).
The near-Sun observing strategy is efficient at discovering the Aten orbital class (orbital semimajor axis < 1 AU (Astronomic Unit) and perihelion distance > 0.983 AU) of NEA's and is also efficient at discovering Apollo class (orbital semimajor axis >1 AU and perihelion distance < 1.017 AU) objects with long synodic periods. This observing strategy will also allow the NEOSSat spacecraft to characterize the population of asteroids that orbit entirely within earth's orbit, known as the Atira orbital class (orbital semimajor axis < 1 AU and aphelion distance < 0.983 AU).
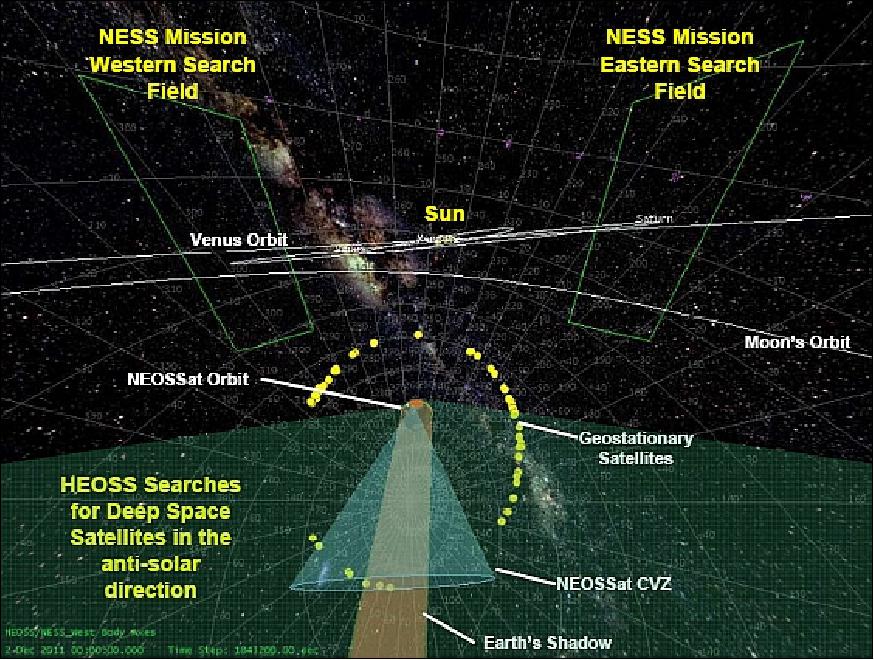
Legend to Figure 1: The NESS mission searches the East and West search fields ~45 degrees solar elongation. The HEOSS mission tracks satellites in the shaded anti-solar direction, towards Earth's shadow at larger solar elongations.
HEOSS (High Earth Orbit Space Surveillance) mission:
DND/DRDC's goal is to use NEOSSat to demonstrate the ability of microsatellites to perform a militarily useful mission. The mission in this case is to obtain satellite position/time data ("metrics") to assist in keeping the US Satellite catalog current ("catalog maintenance"). NEOSSat's optical telescope will be used to track RSOs (Resident Space Objects); these are Earth-orbiting satellites, rocket bodies and debris with altitudes > 15,000 km ("deep space").
Currently there are ~2500 objects in this category, including GNSS (Global Navigation Satellite System) constellations and Geostationary satellites. HEOSS is a two phase mission where the first year after spacecraft commissioning is dedicated to proving microsatellite based SofS (Surveillance of Space) experimentation. The subsequent years of the mission are planned to transition the HEOSS time allocation to an operational Space Surveillance role where taskings are controlled by the Canadian military.
NEOSSat is being designed such that it can detect objects having apparent brightness down to astronomical magnitudes Mv ~13.5, translating to a ~2 m RSO observed at a range of 40,000 km. NEOSSat will be able to track objects moving at angular rates up to 60 arcseconds/second (arcsec/s). This extremely high rate of motion of Earth orbiting objects causes the apparent sensitivity difference between the NESS and HEOSS missions. Asteroid integration dwell times per pixel are two orders of magnitude larger for a given image. During RSO observations, the sensor will be able to obtain full images at a rate of one image every ten seconds, with smaller portions of the CCD being available at faster rates. The metric accuracy goal of HEOSS is to produce measurements accurate to within 3 arcsec (~600 m in the plane of the sky at geostationary satellite ranges).
Spacecraft
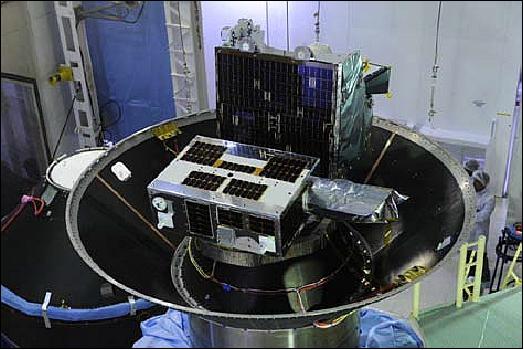
The microsatellite is being designed and manufactured by MSCI (Microsat Systems Canada Inc.) of Mississauga, Ontario as prime contractor, with support from Spectral Applied Research and Routes AstroEngineering. NEOSSat is a three-axis stabilized microsatellite, the first implementation of MMMB, with a launch mass of 72 kg and a bus size of 1.4 m x 0.8 m x 0.4 m. The mission requirements call for an operational life of 1 year (after the commissioning phase) with a goal of two years. The spacecraft is designed to have no death modes (i.e. modes where, in the absence of failures, the spacecraft ceases to operate or to respond to commands). 11) 12) 13)
The MMMB program was initially proposed by CSA in the timeframe 2003. The objective of the initiative is to develop a generic microsatellite bus, an enabling technology, to provide low-cost access for science and technology demonstration missions. The basic MMMB design is structured around a stacking tray concept over which exterior panels, solar cells, and deployables are attached. The bus features a core mechanical structure approach, adaptable to a wide variety of payloads, and a suite of optional bus components to meet a variety of mission requirements. The approach is in standardizing the MMMB architecture, rather than the technology, to permit the introduction of the latest advanced components.
MMMB-1: There are several key subsystems that comprise the MMMB-1 and obviously the payload is mission specific and not part of the MMMB-1. Also, due to different power requirements and some mission specific electronics and ACS sensor interfaces, the MMMB-1 does not include the solar panels, battery, and some mission-specific electronics. The MMMB-1 design is compatible with the following launch vehicles: Cosmos 3M, Delta-IV ESPA, Rockot, Dnepr, Falcon, Taurus, and PSLV.
Bus structure: The bus primary structure is the tray stack, to which all of the satellite's components and secondary structures are mounted. The tray stack is comprised of seven tray assemblies, and each tray houses components used by the subsystems. The trays are assembled with their open tops facing the floor of the next tray to create a sealed enclosure for each tray. The entire structure is held together by eight tie rods that pass through holes around the perimeter of each tray. Finally, the payload telescope and baffle are fastened to the bottom of the tray stack via brackets.
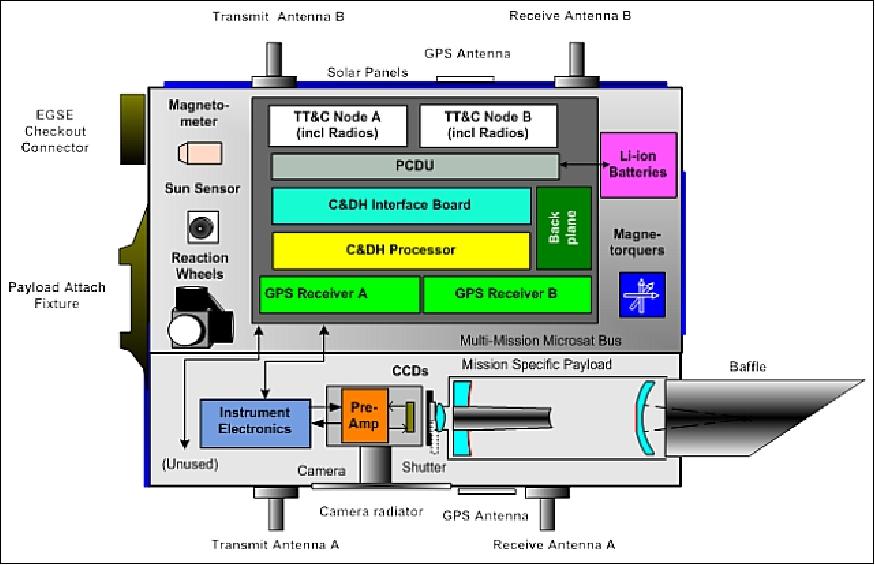
ADCS (Attitude Determination and Control Subsystem): The ADCS is based on a zero-momentum strategy; it is the cornerstone subsystem of NEOSSat and is in charge of performing the high accuracy inertial pointing and tracking of the satellite (along with its optical bore sight). Coarse sun sensors (solar cell current readings), a 3-axis magnetometer, 3 rate sensors and a star tracker form the sensor suite on NEOSSat. The sensor outputs are processed by an EKF (Extended Kalman Filter) which then sends control commands to 3 reaction wheels and 3 magnetorquers.
The ADCS is able to perform inertial pointing to an accuracy of better than 5'' (arcsec) for the pitch and yaw axes, and better than 20'' for the roll axis based on flight data obtained from the MOST microsatellite mission, which has the same ADCS sensors, actuators, and attitude determination and control algorithms. As for pointing stability performance, the ADCS achieves the following pointing performance in the modes:
- SSM (Star Stare Mode): a stunning 0.4'' for yaw, 0.5'' for pitch, and 4.4'' for roll in a 100 s exposure
- TRM (Track Rate Mode): 0.8'' for pitch, 1.2'' for yaw, and 19'' for roll in a 30 s exposure.
Other than the de-tumbling mode, occurring at launch separation, the primary modes of tracking are short slews and long slews.
- Short slews and fine pointing are the mode of tracking during observations to stabilize the camera optics aligned with the moving object in space. It relies on the star tracker that is sharing the optics and the read-out electronics of the payload.
- Long slews and coarse pointing occur to move from one object to another. They do not need accuracy and stability and rely only on the coarse rate gyros and sun sensors.
EPS (Electrical Power Subsystem): EPS generates electrical power with a bus voltage of 28 V from solar cells distributed around the 6 faces of the spacecraft. The faces are not evenly populated with solar cells and power generation is maximized on the 3 faces that will be facing towards the sun most of the time. Payload power usage is 9 W average, and the S/C bus usage is 23 W average.
Power storage is provided by Li-ion battery packs to handle peak current demands e.g. when the radio transmitter is turned on and during solar eclipses which occur seasonally for a fraction of a LEO sun-sync orbit.
It is possible to task the satellite with a power-negative balance of power generation for a short period of time when the battery charge state allows it. This case may occur for instance to track objects in opposition to the sun (e.g. anti-solar elongation of 180º).
The EPS is sized to handle an average of 60-80 minutes of downlink per day (equivalent to 6 daily ground passes of 10-12 minutes from a single station located at around 45º latitude).
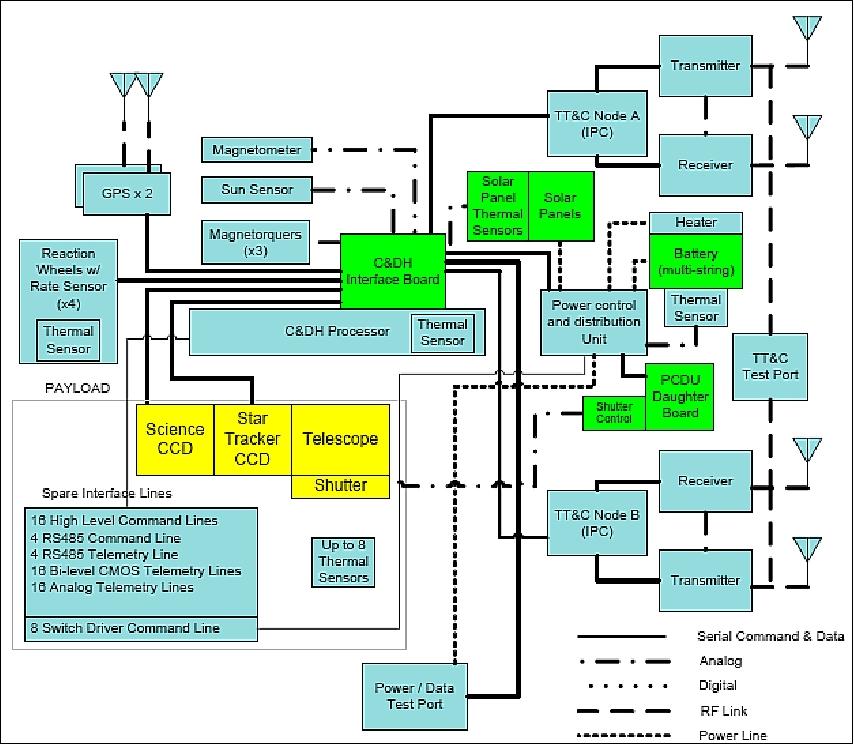
C&DH (Command and Data Handling): This subsystem supports the processing of real-time and time-tagged commands, generating telemetry and handling payload data outputs. There is limited data storage on the spacecraft implemented as a round-robin buffer. Although the buffer read pointer could be reset to any value, the buffer would achieve the full state after around 3 days of continuous observations at the rate of 300 images per day if not emptied during ground passes. In this case, overwriting will occur onboard starting with the oldest data.
TCS (Thermal Control Subsystem): A passive TCS is implemented. Radiative cooling is used to improve the signal-to-noise ratio of the payload imager. No active thermal control system exists except for the battery heater.
RF communications: Use of a dual string of S-band transmitters and receivers. Helix antennas are orthogonally opposed on the spacecraft providing good distribution of the radiation patterns. Turning on and off of the transmitter is accomplished either by time-tagged commands loaded on the C&DH scheduler or directly with manual commands sent from the MOC (Mission Operation Center) during a satellite pass over a ground station.
The spacecraft power system is sized to handle an average of 60-80 minutes of downlink/day (equivalent to 6 daily ground passes of 10-12 minutes from a single station located at around 45º latitude).
Launch
The NEOSSat spacecraft was launched as a secondary payload on Feb. 25, 2013. The launch vehicle was PLSV-C20 of ISRO, and the launch site was SDSC (Satish Dhawan Space Center), India. The primary payload on this flight was SARAL (Satellite with ARgos and ALtiKa), a collaborative mission of ISRO and CNES. 15) 16)
Secondary Payloads
• BRITE-Austria (CanX-3b) and UniBRITE (CanX-3a), both of Austria. UniBRITE and BRiTE-Austria are part of the BRITE Constellation, short for "BRIght-star Target Explorer Constellation", a group of 6.5 kg, 20 cm x 20 cm x 20 cm nanosatellites who purpose is to photometrically measure low-level oscillations and temperature variations in the sky's 286 stars brighter than visual magnitude 3.5.
• Sapphire (Space Surveillance Mission of Canada), a minisatellite with a mass of 148 kg. Sapphire performs catalog maintenance by responding to sensor tasking issued by the JSpOC (Joint Space Operations Center) via the Canadian Armed Forces SSOC (Sensor System Operations Center) located at Royal Canadian Air Force Base 22-Wing North Bay, Ontario.
• NEOSSat (Near-Earth Object Surveillance Satellite), a microsatellite of Canada with a mass of ~74 kg.
• AAUSat-3 (Aalborg University CubeSat-3), a student-developed nanosatellite (1U CubeSat) of AAU, Aalborg, Denmark. The project is sponsored by DaMSA (Danish Maritime Safety Organization).
• STRaND-1 (Surrey Training, Research and Nanosatellite Demonstrator), a 3U CubeSat (nanosatellite) of SSTL (Surrey Satellite Technology Limited) and the USSC (University of Surrey Space Centre), Guildford, UK. STRaND-1 has a mass of ~ 4.3 kg.
Orbit: Sun-synchronous near-circular dawn-dusk orbit, altitude of ~786 km, inclination of 98.55º, orbital period of 100.6 minutes, LTAN (Local Time on Ascending Node) = 6:00 hours.
Mission Status
• January 24, 2019: Canada's NEOSSat is the world's first space telescope for dual-mode space surveillance of near-Earth asteroids/comets and man-made resident space objects orbiting the Earth. Launched in February 2013 and jointly funded by the Canadian Space Agency (CSA) and Defence Research & Development Canada (DRDC) as a low-cost technology demonstration microsatellite with minimal redundancy, NEOSSat operations continue into its fifth year on-orbit. 18)
In summary, overcoming some early mission challenges, NEOSSat has been able to advance the state-of-the-art in space-based surveillance of both NEO and RSOs (Resident Space Objects). Some key achievements and innovations include:
- Track-rate imaging and metric observations of fast-moving LEO satellites/debris from a LEO platform at speeds up to 215 arcseconds/second
- Fine Point imaging of NEO survey fields and known asteroids/comets at low solar elongations, (under 15 degrees solar elongation during eclipse period)
- The key drivers enabling the success of the NEOSSat mission include its innovative narrow-field star tracker enabling high-precision attitude determination and its precision reaction wheels with integrated rate sensors. Together with an attitude control system design that minimizes jitter and induced vibrations, the system achieves a high degree of pointing and tracking accuracy at arbitrary targets throughout the celestial sky from a relatively low-cost microsatellite platform.
- NEOSSat's impressive performance at low solar elongations can also be attributed to the telescope's baffle, which successfully minimizes stray light from the Sun, Earth limb and Moon, enabling optical observations in regions generally inaccessible to ground telescopes.
NEO and RSO Surveillance Synergies
While the mission goals are different, there are several useful synergies between the NEO and RSO surveillance missions on NEOSSat. Both missions have benefited from NEOSSat's superior attitude control and baffle performance to image their targets at lower solar elongations than competing instruments. In addition, any developments done on image noise reduction, astrometric and photometric processing benefit both missions. While track-rate mode imaging operations were initially intended primarily for tracking fast-moving RSOs, they have been used routinely to track fast-moving asteroids as they make close approaches with the Earth. Similarly, the Fine Point operations intended primarily for the NEO survey operations have been used for imaging interesting RSO situations, such as close approaches, at key times. Shift&stack techniques for RSO tracklet detection and measurement are worth pursuing, as are star streak measurement techniques for NEO astrometry.
There are some areas where the requirements for RSO tracking and NEO survey differ. The NEO mission demands the best possible instrument focus to concentrate all the light from a faint target on a single pixel and maximize the achievable limiting magnitude. By contrast, the RSO surveillance mission benefits from a looser optical focus that spreads the same light over more pixels to provide sub-pixel accuracy on the metrics. Similarly, photometric applications benefit from slight de-focus to reduce the chances of pixel saturation and ensure that all light from a given object is measured.
Exoplanet Transit Photometry Application
Another exciting new development has been the recent utilization of NEOSSat for exoplanet transit photometry. The field of exoplanet astrophysics has seen an era of rapid discovery driven by thousands of confirmed planets discovered using photometric and spectroscopic techniques. Many transiting exoplanets were discovered with photometry from NASA's Kepler mission. Kepler exoplanet host stars have apparent visual magnitudes typically fainter than V~12. The latest exoplanet mission, NASA's Transiting Exoplanet Survey Satellite (TESS), targets brighter stars (V~5-12). While Kepler was able to observe the systems for four years, the typical TESS target is limited to a few weeks of observations. Thus, additional observations are needed to better refine orbital periods and the photometric transit shape. Photometric observations from NEOSSat can contribute to this task.
To prepare for precision photometry, new image cleaning techniques for overscan, bias and dark correction were developed. The acquired overscan region is used to correct for electronic interference and bias offset. Using a Fourier series to model the coherent and repeating noise source, the amplitudes of detectable coherent noise range from 1 to 10 counts of Analog-Digital Unit (ADU). For dark correction, a master dark - a median average of all overscan and bias corrected darks that are relatively free of cosmic ray hits - is created based on acquired dark images from the same day as observations. The master dark is then scaled using a robust linear fit to match the science images. The master dark was found to scale extremely well with temperature.
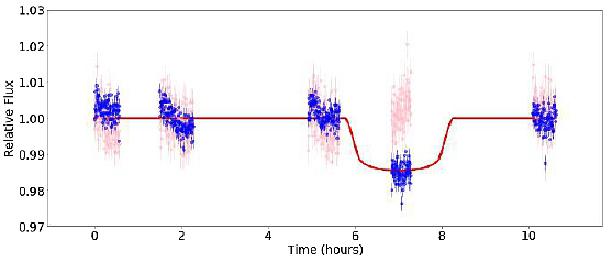
Photometry was extracted using small apertures centered on stars of interest. Photometric centroids were estimated based on flux-weighted average. Background levels are locally estimated based on medians of pixels free of stars. For stars brighter than V~10, it was found that photometric uncertainties are photon-limited. Thus, noise from dark-current, electronic noise and stray light are not significant contributors. Observations of the WASP-33 exoplanet host star (Figure 8) demonstrated a clear exoplanet transit detection and sub-milli-magnitude photometry based on short 1-second exposures. NEOSSat is currently collecting such follow-up light curves on a variety of TESS-detected transit candidates.
Five years after its launch, NEOSSat has become a unique platform to perform follow-up on candidate discoveries from other exoplanet hunting platforms. This work to develop advanced image cleaning techniques and precision photometry from NEOSSat will enable new possibilities for scientific investigations and characterization of RSO, NEO and other celestial objects.
• August 2018: NEOSSat presented a strong challenge to use available in-flight hardware as well as software modifications to compensate for a lost magnetometer. Building on existing literature with a couple of novel adaptations resulted in NEOSSat's GPS receiver being augmented to serve as an attitude sensor. Estimating the antenna's boresight in the inertial frame of reference and knowing the boresight's direction in the body frame by design, the algorithm creates a vector pair that feeds into the satellite's EKF, replacing the vector pair that had previously been provided by the magnetometer. Even in the presence of multipath effects, RMS errors of the GPS attitude sensor are typically 10 degrees or better. 19)
- While there is some novelty in the work presented, the key aspiration of this paper is to affirm that single-antenna GPS receivers, common on nanosatellites and microsatellites, can serve a dual purpose and therefore contribute to attitude determination in a meaningful way. For little work and cost that is entirely software based, complementary or back-up attitude sensing is made possible for satellites already on orbit and could become more commonly employed in the field. As noted earlier, a little hardware design work up front, in the form of keeping GPS antennas clear from nearby protrusions and or adding choke rings, would notably help reduce multipath effects and improve performance results.
- The main outcome and highlight of this work is that the NEOSSat mission, once jeopardized by unexpected unit failures – in the magnetometer and elsewhere as described by Abbasi (Ref. 20), has been successfully recovered and continues to operate well.
• June 2018: After suffering the failure of its magnetometer and all torque rods, the NEOSSat microsatellite has recovered operations through the use of novel attitude determination and control algorithms that utilize a minimal sensor and actuator suite. Following recovery, NEOSSat has regained the performance necessary to accomplish its near-Earth object space surveillance mission with only a modest duty cycle reduction and adjustments to spacecraft operation planning. 20)
- In 2016, NEOSSat suffered a permanent failure of its magnetometer, an anomaly attributed to the effects of the space environment. The magnetometer and coarse sun sensor had been the sensor pair providing coarse attitude determination, which was a prerequisite for star tracker acquisition and fine pointing operation. Prior to the failure, NEOSSat was able to routinely acquire its pointing targets, transitioning from coarse pointing to fine pointing as required to perform its tasked operations. With the failed magnetometer, the attitude determination system could no longer reliably solve for an attitude solution. Consequently, the failure resulted in a complete loss of attitude determination and control. Pointing attempts with bad attitude information failed and the satellite was in a lost and tumbling state.
- Attempts to reboot, recover or recalibrate the magnetometer all failed. Over time, it became clear the magnetometer could not be used. Attempting to perform any kind of pointing operation without reliable attitude determination would cause cascading problems. Firstly, the satellite's attempted correction slews would always be erroneous, pushing the satellite aimlessly in random directions and triggering numerous fail-safe conditions. Worse, onboard momentum would build up over time causing reaction wheel saturation. This occurred because desaturation with the torque rods requires sufficient attitude knowledge relative to the Earth's magnetic field to issue the proper torque rod commands for wheel desaturation. Without any reliable source of magnetic field measurement or estimate, the torque rods could not be used for desaturation and could even easily contribute to momentum build-up. The safest and most reliable option was to leave the satellite in a tumbling state and to stop all attempts at attitude control, including desaturation. By avoiding slews, at least the satellite's tumble would be relatively constant and momentum would dissipate naturally over time. Faced with this critical failure, all mission activities were halted and the focus shifted to maintaining satellite health while new solutions could be developed to work around the failure.
- Many ideas were considered to find a way to recover attitude determination that was lost with the failure of the magnetometer. Only flight software updates could be entertained as hardware servicing was not an option post-launch. Ideas included performing full attitude determination based on the functional sun sensors only, and using the star tracker for coarse attitude determination, either directly from tumbling, or after attitude stabilization using momentum transfer algorithms. Another innovative approach considered was to estimate the magnetic field vector in the satellite's Extended Kalman Filter (EKF) for attitude determination by measuring the dynamic effects of torque rods on the satellite's body rates.
- Ultimately, the recovery plan settled upon was to create a new GPS-based attitude sensor for use in the satellite's EKF for attitude determination. The failed magnetometer attitude vector pair would be replaced by a new GPS-based attitude vector pair derived from assembly-and-integration knowledge of the GPS antennas in the body frame and an estimated orientation of the GPS receivers in the inertial frame. Building on existing GPS literature, the chosen solution would estimate the GPS antenna's look direction in an inertial frame of reference using information on the GPS space vehicles (SV) being tracked by the receiver. Matched with the known GPS antenna vector in the body frame (from mounting), a vector pair could be created to replace the vector pair created from the measured magnetometer readings and reference magnetic field.
- This solution would require detailed information on the signal-to-noise ratio of all GPS signals being received and the inertial positions of all contributing GPS space vehicles. Additionally, the antenna gain pattern for NEOSSat's onboard GPS receiver was unknown, but needed to be calculated with reasonable accuracy to get an effective solution. Therefore, the flight software was updated in two phases: first, an interim software build would augment the GPS interface to collect advanced logs on the GPS space vehicles being tracked and provide a new control mode that would be able to stabilize the satellite sufficiently to collect the calibration data required to implement the GPS-based attitude sensor. This interim control mode, known as Sun-Point, also allowed NEOSSat to transition from the uncontrolled tumbling state to a new controlled attitude state that allowed stabilization and could maintain battery temperatures within safety limits using only the onboard coarse sun sensors and rate sensors.
- NEOSSat's second major hardware failure occurred in late 2016, several months after the magnetometer failure and before the GPS sensor solution was available for attitude determination. During this time, the Sun-Point control mode was being used to maintain relatively stable pointing and battery temperatures within the nominal range. The mode was supported by maintaining a constant open-loop dipole on the torque rods to counteract the body-fixed residual dipole disturbance torque, which enabled long-term stays in Sun-Point without causing wheel desaturation. It was during this state that a loss of communication anomaly developed on the STM32 microcontroller controlling the torque rods. This type of loss of communication failure between the main flight computer and the torque rod microcontroller had previously been encountered during the mission but unlike previous occurrences, the typical recovery approach of performing a power cycle of the microcontroller was unsuccessful. The STM32 microcontroller remained unresponsive. After a variety of unsuccessful recovery attempts, the unit was deemed failed permanently, resulting in the permanent loss of all three torque rods.
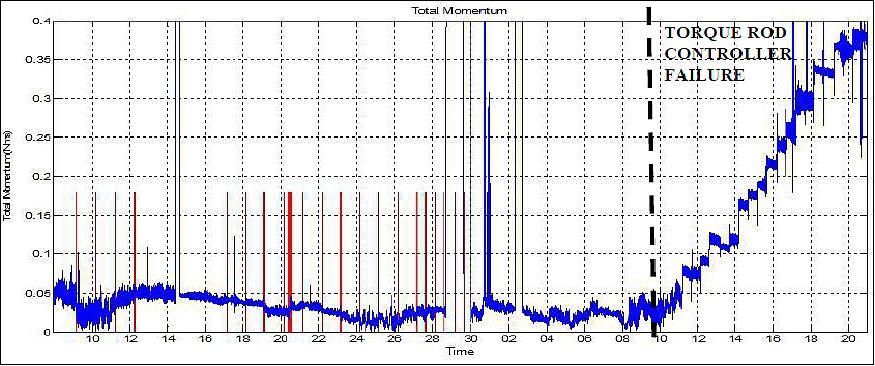
- The impact of this new failure was that, once again, NEOSSat lost the ability to desaturate its reaction wheels. The constants torques being applied by the torque rods to counteract the residual dipole could no longer be applied. These torques were necessary to prevent momentum buildup and wheel saturation. Without a desaturation strategy, the Sun-Point control mode would quickly build up momentum leading to wheel saturation and the inability to maintain Sun pointing. Figure 9 shows the rapid rise in total spacecraft momentum over a few days in Sun-Point without the torque rods applying the residual dipole compensation torque. A new concept of operations would be needed to maintain health and safety of the satellite while work continued on the GPS strategy to recover attitude determination.
- The operations team determined that the optimal strategy would be to idle the reaction wheels and allow the satellite to tumble as long as it was in a "safe" tumble from a thermal standpoint and use either Sun-Point or the open-loop "flip" maneuver whenever temperature and sun sensor telemetry would show a drift into an unsafe condition. The decision to use Sun-Point or "flip" would be based on available momentum. In low-momentum situations, there would be enough momentum headroom for closed-loop Sun-Point control and this would be used. In high-momentum situations, there may not be enough momentum headroom to perform the required Sun-Point slews and thus the open-loop "flip" maneuver would be preferred. Both approaches would reliably change the direction of the angular momentum and restore a safe power and thermal configuration. The use of Sun-Point would also raise onboard momentum and this was acceptable operationally as a stable spin would more predictable than a low-momentum drift. Over time, momentum would be naturally dissipated due to the various disturbance torques acting on the satellite and Sun-Point would be used to correct the Sun vector and raise the overall momentum, thus providing a more stable spin after exiting Sun-Point.
- This practice became the new baseline as the GPS attitude sensor was being finalized to recover attitude determination. But even if attitude determination and pointing ability were soon to be recovered, operations would be limited unless the attitude control system also had the ability to dump excess momentum as required. With NEOSSat's strong residual magnetic dipole, pointing operations can saturate the reaction wheels in a matter of hours and the inability to counter momentum buildup would be prohibitive to the mission. Now, a new desaturation strategy would also need to be developed. This strategy could not depend on the now-failed torque rods. For attitude determination without the magnetometer, some literature had been available on the topic and simulations of the GPS strategy had already given the team confidence that NEOSSat's attitude determination would soon be recovered. On the other hand, the requirement to perform desaturation without torque rods was a completely new problem, one for which the team could find no previous literature or heritage.
• February 2017: The NEOSSat microsatellite mission, now under the Satellite Operations branch of CSA, is fully operational. 21)
• September 2016: Canada has fielded spaceborne space surveillance capabilities by launching the Canadian Armed Forces' Sapphire satellite and the research microsatellite NEOSSat. Sapphire is an operational space surveillance capability which is now a contributing sensor to the US Space Surveillance Network transmitting more than 3000 observations/day to the JSpOC (Joint Space Operations Center). NEOSSat, with its dual mission of asteroid astronomy and SSA (Space Situational Awareness) experimentation, has produced space surveillance imagery suitable for its experimental mission, despite a prolonged commissioning and on-orbit calibration period after its launch. The SSA mission of NEOSSat, known as the HEOSS (High Earth Orbit Space Surveillance) mission, initiated its experimental activities in late 2015. 22)
- One of the HEOSS experiment objectives is to perform combined space surveillance observations with Sapphire to examine the practicalities of performing such observations. Sapphire and NEOSSat were not designed to be inherently interoperable with one another; however, using Canadian Armed Forces Sapphire operator know-how, and the research flexibility of the NEOSSat microsatellite, the sensors can be used to approximate combined observation operations.
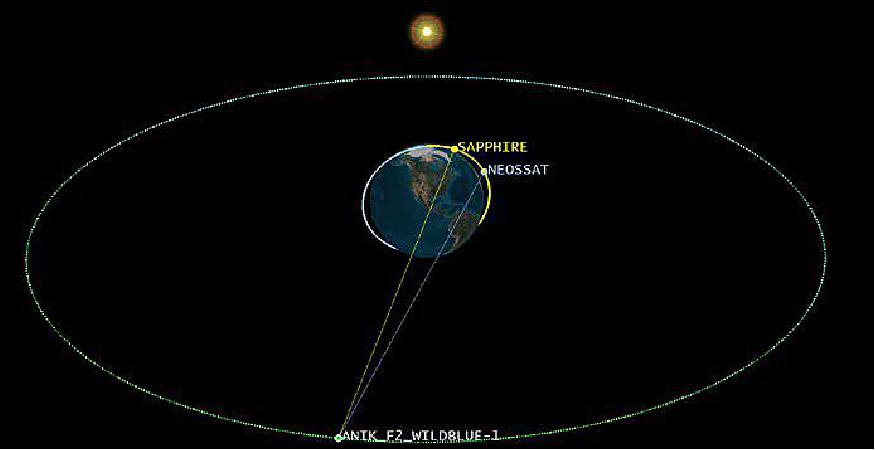
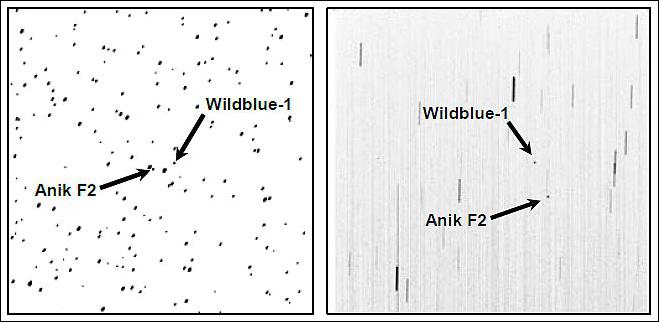
- Both NEOSSat and Sapphire follow nearly identical orbital trajectories. During the interval of 3-4 February 2016 when both sensors were performing this experiment, Sapphire was leading NEOSSat in orbit by approximately 4700 km (Figure 10). Both NEOSSat and Sapphire generally track objects in the antisolar direction to a) benefit from favorable illumination phase angles, and b) reduce the slewing demand such that the satellites work productively on orbit which reduces the slewing intervals for the satellites. Both NEOSSat and Sapphire generally track geostationary satellites in the anti-solar direction. For the tracks acquired on the Anik F2 cluster both spaceborne sensors detected the target RSOs (Resident Space Objects) simultaneously within the field of view of their instruments (Figure 11). This tracking approach reduces the amount of "step and stare" motions that the spacecraft need to perform to track the objects.
In summary, dual observers performing space surveillance measurements on geosynchronous objects can maintain orbit custody on geosynchronous space objects. The availability of the sensors, which is unaffected by weather, permits routine daily tracking of space objects enabling regular orbit updates. Spaceborne surveillance instruments are usually tasked to track objects on Earth's night side where phase angle geometry brightens the targeted space objects and lowers the slew demands on space surveillance sensors. After two tracks, in-track orbit uncertainties can be as low as 0.5 km for Sapphire and 5 km for NEOSSat. The anti-solar viewing geometry tends to reduce space-based space surveillance sensors' ability to detect maneuvers as orbit recovery can take up to two days.
While combining NEOSSat and Sapphire data in a fused scenario offered lessons in sensor coordination, the larger sensor noise of NEOSSat was less effective at estimating orbital tracks of Anik F2. One advantage of the NEOSSat sensor is its ability to track in regions of space that are not limited to the anti-solar direction. This offers a wider tracking arc of target orbital motion. This will be explored in the future as a means to increase orbit custody by performing high phase-angle observations of space objects and help to learn new ways to employ space telescopes to help ensure safety of flight in space.
• April 20, 2015: CSA has released a series of four images taken by the NEOSSat in early 2015.The released images provide a strong indication that initial difficulties relating to the roll out of the satellite during the 2013 - 2014 period are finally being overcome. 23)
- According to Ross Gillett of MSCI (Microsat Systems Canada Inc.), the images have been deemed by the CSA to be suitable to release "for educational purposes," and are expected to eventually end up in university level academic presentations related to NEOSSat operations and the various technologies and techniques used to assess and study space derived images.

• Nov. 24, 2014: With the two year anniversary of its launch coming up (in Feb. 2015), the NEOSSat is still only partially achieving its mission goals. The updated mission news is a mix of good and bad. NEOSSat, promoted as the "world's first experimental microsatellite designed to detect and track space objects, debris and satellites", has two primary missions. 24)
- The Department of National Defence's (DND) space surveillance mission monitors debris in the MEO (Medium Earth Orbit ) and GEO (Geostationary Earth Orbit) regions and is referred to as the HEOSS (High Earth Orbit Space Surveillance) mission. The Canadian Space Agency's (CSA) mission is to track asteroids and is referred to as the NESS (Near Earth Space Surveillance) mission.
- The project, now in its ninth year, faced long delays before it was launched almost two years ago. This included delays in the satellite launch by the launch service provider Antrix, the commercial space arm of ISRO (Indian Space Research Organization), and the "lack of capacity on the part of the prime contractor" according to a report published earlier this year by the CSA. For its part, the prime contractor, MSCI (Microsat Systems Canada Inc.), has stated that changes in the scope of the project resulted in many of the delays.
- The CSA report, Evaluation of the NEOSSat Project, outlined several problems with the satellite. Surprisingly the report states the satellite was launched "somewhat" prematurely. Why it was launched prematurely is not a question the report addresses. The CSA report also states the project, which cost $25 million, was underfunded by as much as 50%.
- The main problem with the satellite is that the computer programs, in particular the "fine pointing" software module which is required to take the necessary images of orbiting objects and asteroids wasn't ready at the time of launch. The solution was to upload updated software to fix the problem once on-orbit. Unfortunately, while some progress has been made, the problem with the fine pointing still exists.
- With respect to the images acquired by NEOSSat the report stated "the image quality does not at present meet the imagery requirements of the scientific aspects of the mission. NEOSSat is only taking engineering images and not scientific images. In December 2013, the science teams developed a post-processing technique that removes the pattern on short duration exposure images and imagery can be used for some mission objectives. A stable focus is needed in the imager in order to yield images of a scientific quality, due to the very low levels of light that are reflected off asteroids. Whether the intended production of 288 images per day can ever be achieved is a matter of concern."
- There is some good news though. The DND's HEOSS "has demonstrated the capability to pursue its research and development goals that relate to monitoring orbiting space objects" according to the Canadian Space Agency when SpaceRef contacted them last week.
- In addition, the CSA told SpaceRef that with respect to NESS "although significant progress has been made towards NEOSSat's ability to achieve its objectives with respect to the NESS (Near-Earth Space Surveillance) mission, its more stringent requirements with respect to this mission remain to be demonstrated. Further enhancements are planned in the coming months to reach maximum performance (image quality and sensitivity, attitude control system) and to meet the scientific objectives of the NESS mission."
• Feb. 2014: The NEOSSat on-orbit check-out is progressing. 25)
• June 14, 2013: The spacecraft is responsive and healthy. Testing of systems and software is ongoing.
• In mid-May 2013, the NEOSSat mission is still in the commissioning phase. 26)
Sensor Complement
NESSI (Near Earth Space Surveillance Imager)
Note: The name NESSI is preliminary, selected by myself since no instrument name was available at the time of this writing.
The objective of NESSI is to provide data for the first time about potentially hazardous situations in the near-Earth environment and to enhance the state of alert, while extending the response lead times. In addition to conducting a survey to discover and monitor NEOs (Near Earth Objects), NEAs (Near-Earth Asteroids) and comets approaching close to Earth, the NEOSSat spacecraft will also be used to increase awareness of man-made objects in orbit around the Earth, such as spacecraft and large pieces of space debris.
Apart from identifying potentially hazardous NEOs, NEOSSat data will be used by scientists to investigate:
• NEOs containing well-preserved evidence of conditions during the creation of our solar system, these being one of the best sources of information on its formation
• NEO data contributing to a comprehensive model of the physical and dynamical properties of the minor bodies in our solar system and of the specific differences and similarities between asteroid populations, and to an exploration of their relationships to each other
• Data needed to evaluate NEO populations for potential future investigations, sample return or in situ resource extraction missions enabled by their proximity to Earth.
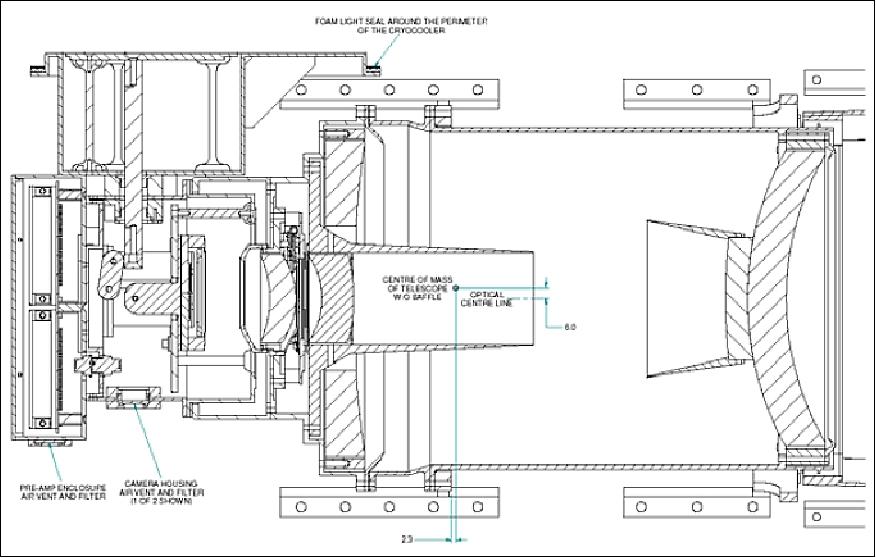
Optics: NESSI utilizes a Maksutov Cassegrain telescope of 15 cm aperture which shares design lineage with the MOST mission. The NEOSSat telescope is simplified from the MOST design and optimized for imaging by addition of field flattening optics. A sun safety shutter is also added to reduce risk of damage to the CCD array should the boresight be pointed toward the sun. The focal length of the optical system is 893 mm (f/5.7). The instrument has been designed and developed at Spectral Applied Research Inc., Richmond Hill, Ontario. 27)
Telescope | 15 cm diameter, F/6 Rumak-Maksutov (Cassegrain) |
Aperture diameter | 157 mm |
Central obstruction diameter | 89.4 mm |
Focal length | 893 mm (f/5.7) |
Effective aperture area | 131 cm2 |
Science FOV (Field of View) | 0.85º x 0.85º |
Detector | 2 CCD area arrays of 1024 x 1024 pixels, back illuminated E2V 47-20 |
Detector pitch | 13 µm |
Spectral range | 350 – 1050 nm |
PSF(Point Spread Function) | 1.1 pixel |
System QE (Quantum Efficiency), peak | 0.78 @ 600 nm |
Pointing knowledge | 1.2 arcmin (2σ) |

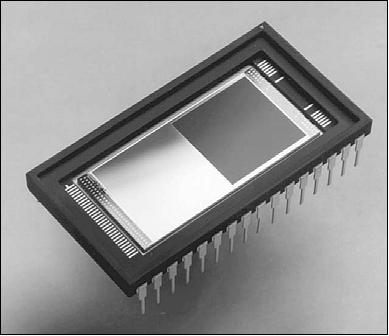
The detector of the imager consists of two, side abutted, E2V 47-20 mid-band coated frame transfer CCDs (Charge Coupled Devices) serving both the fine guidance and science functions of the NEOSSat microsatellite. The detector arrays are comprised of 1024 x 1024 pixels with a 13 µm pitch (Figure 15). The frame transfer area is covered so light from the optical system is not absorbed during CCD readout.
When the detector is receiving light from the telescope, a point source creates a PSF (Point Spread Function) with a non-Gaussian shape. Current estimates for the width of the PSF are a FWHM of ~1.1 pixel. This PSF and pixel scale corresponds to a ~62% ensquared energy deposition on the best pixel of the CCD array. This approach undersamples the point spread function on the imaging plane, but provides increased sensitivity to fainter objects, at the cost of reduced centroid accuracy for astrometry (Figure 16).
ROE (Read-Out Electronics): The ROE is a custom fabricated board to read out the CCD arrays after frame transfer has occurred. Noise control during readout must be maintained in order to produce images of high scientific quality. The ROE shifts and counts the charge collected on the CCD array in order to create images used by the science team and the ADCS star tracker.

The light suppression baffle of the telescope is designed to suppress stray light from entering the optical system and impinging onto the detector plane which diminishes signal to noise for faint object detection. The illuminated portion of the Earth, sunlight and the moon are some of the primary sources of light which can impede the science missions. For HEOSS observations the light suppression baffle primarily suppresses light from the illuminated sector of the Earth. During NESS observations the baffle suppresses bright sunlight from entering the optical system that would prevent the detection of faint asteroids.
Ground Segment
The NEOSSat ground segment is comprised of separate functional components:
• SOC/POC (Science/Payload Operations Center). The NESS SOC/POC is located at the University of Calgary, Alberta, while the HESS SOC/POC is located in Ottawa, Ontario.
• MOC (Mission Operations Center). The MOC is based on an existing facility responsible for operating all satellites operated by the CSA, located in St.-Hubert, Quebec. The MOC is responsible for commanding and controlling the satellite on-orbit operations by transmitting the payload tasking schedules, originating from the MPS, to the satellite and receiving the payload data products after execution. The MOC coordinates the different resources such as ground station access times, spacecraft pass schedules and spacecraft maintenance operations.
• MPS (Mission Planning System) located in Ottawa. The MPS is the interface between the SOC/POC and the MOC. The MPS evaluates the various payload task requests to produce the payload activity schedule. The MPS also acts as a repository of payload data products and will be made available to the users.
Two CSA ground stations, each a 10 m diameter antenna, are currently baselined as the primary system used throughout the life of the mission. The prime ground station is located in St-Hubert (Québec) and the co-prime is in Saskatoon (Saskatchewan). The use of these two facilities will allow for, on average, approximately 50 minutes of communications with NEOSSat per day. The DRDC ground station in Ottawa represents a third ground station that may be used during the life of the NEOSSat spacecraft. Due to its proximity to the St-Hubert ground station, the addition of the DRDC facility will not add contact times to what is already achievable with the CSA resources.
References
1) Siamak Tafazoli, Pascal Tremblay, Alan Hildebrand, "NEOSSat and M3MSat - Two Canadian Microsat Missions," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B4.2.9
2) Siamak Tafazoli, William Harvey, Alan Hildebrand, Robert Cardinal, Brad Wallace, Robert (Lauchie) Scott, "NEOSSat - World's First Dedicated Near Earth Object Surveillance Satellite," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
3) David Kendall, "The Canadian Near Earth Object Satellite Mission: NEOSSat," UNOOSA STSC2009 (Scientific and Technical Subcommittee), Feb. 9-20, 2009, Vienna, Austria, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2009/tech-26.pdf
4) Brad Wallace, Frank Pinkney, Robert Scott, Donald Bedard, Jim Rody, Aaron Spaans, Martin Levesque, Sylvie Buteau, Tom Racey, Doug Burrell, Alan Hildebrand, "The Near Earth Orbit Surveillance Satellite (NEOSSat)," 55th IAC (International Astronautical Congress) 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.5.12.1.02
5) Donald Bédard, Aaron Spaans, "Responsive Space for the Canadian Forces," 5th Responsive Space Conference, April 23–26, 2007, Los Angeles, CA, USA, URL: https://web.archive.org/web/20131213020218/http://www.responsivespace.com/Papers/RS5/SESSION%20PAPERS/SESSION%203/3004_BEDARD/3004P.pdf
6) William Harvey, Tony Morris, "NEOSSat : A Collaborative Microsatellite Project for Space Based Object Detection," Proceedings of the 22nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2008, SSC08-III-5, URL of paper: http://digitalcommons.usu.edu/cgi/viewcontent.cgi
?article=1367&context=smallsat, URL of presentation: http://digitalcommons.usu.edu/cgi/viewcontent.cg
i?filename=0&article=1367&context=smallsat&type=additional
7) H. Ngo, "NEOSSat's new NEO orbital model," Vol. 6, EPSC-DPS2011-284-1, 2011, URL: http://meetingorganizer.copernicus.org/EPSC-
DPS2011/EPSC-DPS2011-284-1.pdf
8) Donald Bédard, Lauchie Scott, Brad Wallace, Stefan Thorsteinson, William Harvey, Siamak Tafazoli, Michel Fortin, Jaymie Matthews, Rainer Kuschnig, Jason Rowe, "Risk Reduction Activities for the Near-Earth Object Surveillance Satellite Project," 2006, URL: http://www.amostech.com/TechnicalPapers/2006/Satellite_Metrics/Bedard.pdf
9) Denis Laurin, Alan Hildebrand, Rob Cardinal, William Harvey, Siamak Tafazoli, "NEOSSat – A Canadian small space telescope for near Earth asteroid detection," Proceedings of SPIE, Vol. 7010, 701013-2, 2008,'Space Telescopes and Instrumentation 2008: Optical, Infrared, and Millimeter,' edited by Jacobus M. Oschmann, Jr., Mattheus W. M. de Graauw, Howard A. MacEwen, URL: http://144.206.159.178/ft/CONF/16416993/16417026.pdf
10) Denis Laurin, William Harvey, Siamak Tafazoli, James Doherty, Alan Hildebrand, Rob Cardinal , Brad Wallace, Robert Scott, Michael Sale, "NEOSSat – the Canadian Near Earth Object Surveillance Satellite," ASTRO'12 16th ACSI Astronautics Conference, Québec City, Canada, April 23-26, 2012, URL: ftp://astroconference.ca/../ASTRO%20FULL%20PAPERS%202012/60_
NEOSSat_TheCanadianNearEarthObject_Laurin_Paper.pdf
11) http://www.mscinc.ca/heritage/neossat.html
12) http://www.mscinc.ca/products/neossat.html
13) "NESS (Near-Earth Space Surveillance)," URL: http://neossat.ca/links.html/
14) Luc Brûlé, Martin Bergeron, Gilles Brassard, CatherineCasgrain, Ralph Girard, Guennadi Kroupnik, Denis Laurin, "The Canadian Space Agency Microsatellite Program," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.4.12
15) "PSLV - C20 successfully launches Indo-French satellite SARAL and six other commercial payloads into the orbit," ISRO, Feb. 25, 2013, URL: http://www.isro.org/pslv-c20/c20-status.aspx
16) "NEOSSat: Canada's sentinel in the skies," CSA, Feb. 25, 2013, URL: http://www.asc-csa.gc.ca/eng/satellites/neossat/
18) V. Abbasi, S. Thorsteinson, D. Balam, J. Rowe, D. Laurin, L. Scott, M. Doyon, "The NEOSSat experience: 5 years in the life of Canada's Space Surveillance Telescope," Proceedings of the 1st NEO and Debris Detection Conference, Darmstadt, Germany, 22-24 January 2019, URL: https://conference.sdo.esoc.esa.int/proceedings/neosst1
/paper/494/NEOSST1-paper494.pdf
19) Stuart Eagleson, Viqar Abbasi, Natasha Jackson, Robert (Lauchie) Scott, Stefan Thorsteinson, "Single GPS Antenna Attitude Vector Pair – NEOSSat Recovery," Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-WKI-07, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4236&context=smallsat
20) Viqar Abbasi, Natasha Jackson, Michel Doyon, Ron Wessels, Pooya Sekhavat, Matthew Cannata, Ross Gillett, Stuart Eagleson, "NEOSSat Recovery Following Magnetometer and Torque Rod Failure," Proceedings of the SpaceOps Conference, Marseille, France, 28 May -1 June 2018, URL: https://arc.aiaa.org/doi/pdfplus/10.2514/6.2018-2664
21) Information provided by Siamak Tafazoli of CSA (Canadian Space Agency).
22) Robert Scott, Kevin Bernard, Stefan Thorsteinson, "Combined Space-Based Observations of Geostationary Satellites," Proceedings of the 17th AMOS (Advanced Maui Optical and Space Surveillance Technology Conference), Maui, Hawaii, USA, Sept. 20-23, 2016, URL: http://www.amostech.com/TechnicalPapers/2016/
Instrumentation_Optical-Surveillance/Scott.pdf
23) Chuck Black, "Four NEOSSat Images in Search of Respect," April 20, 2015, URL: http://acuriousguy.blogspot.de/2015/04/four-neossat
-images-in-search-of-respect.html
24) Marc Boucher, "The NEOSSat Satellite is Meeting Some of its Objectives But Still Has Issues to Resolve," Space Ref, Nov. 11, 2014, URL: http://spaceref.ca/missions-and-programs/canadian-space-
agency/the-neossat-satellite-is-meeting-some-of-its-objectives
-but-still-has-issues-to-resolve.html
25) David Kendall, "Advances in Canada's Contributions to Space Situational Awareness," Proceedings of the 51st Session of Scientific & Technical Subcommittee of UNCOPUOS, Vienna, Austria, Feb. 11-22, 2014, URL: http://www.unoosa.org/pdf/pres/stsc2014/tech-23E.pdf
26) Information provided by Siamak Tafazoli of CSA (Canadian Space Agency).
27) Spectral Applied Research, URL: http://www.spectral.ca/home/index.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top