OPAL (Orbiting Picosatellite Automatic Launcher)
Non-EO
Education
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 27 Jan 2000 |
OPAL (Orbiting Picosatellite Automatic Launcher)
OPAL is a student-designed microsatellite of SSDL (Space Systems Development Laboratory) at Stanford University, Stanford, CA. The objective is to test the feasibility of launching several picosatellites (daughterships) from a mothership microsatellite. The picosats and the mothership, OPAL, are instrumented with magnetometers to measure their attitude relative to the magnetic field. The intent is to simultaneously sample a volume of space for denser magnetic field measurements. OPAL uses a mechanical launching system to eject six hockey-puck sized picosats. OPAL's secondary payload consists of a suite of miniature accelerometers and a fluxgate magnetometer. The OPAL design was started in 1995 and was completed in May 1999. 1) 2) 3)

Spacecraft
The OPAL spacecraft structure resembles a hexagonal prism, consisting of 4 hexagonal horizontal trays connected by 4 vertical rods. The space between the trays is used by each subsystem to place its components. The components are mounted in aluminum boxes, the boxes are fastened to the trays. The trays are surrounded by 6 side panels, which double as structural members and solar array surfaces (GaAs and Ge). Solar cells are also mounted on the outside of the top and bottom trays. All panels and trays are made out of 6 mm aluminum honeycomb, except for the bottom tray, which is 12 mm thick to support the carrier attachment and to be able to handle the heavier launch loads.
Some spacecraft parameters: body height = 23.5 cm, radius = 21 cm, total mass = 25.5 kg. The on-board computer consists of a Motorola 68332 microcontroller (16 MHz, 1 MB RAM). Power storage is provided by NiCd batteries (1.2 V, 5 Ah). Power is regulated to 5V and 8V, the average power consumption is 2.4 W (12 W max). Secondary power is provided by NiCd batteries. Note: An attitude control system was not implemented since the mission objective did not require any attitude control. However, the attitude can be estimated from the magnetometer readings as well as from the solar panel currents.

RF communications: OPAL has four 1/4 wavelength monopole antennas (each about 17.5 cm) which are placed on the top and bottom panels (right-hand polarized). OPAL uses packet radio transmissions over amateur radio frequencies (uplink/downlink at 420-450 MHz, transmitter of 2.2 W, AX25 protocol, data rate = 9.6 kbit/s). The IP (Internet Protocol) is used between users and the OPAL ground system. 4)
Launch
A launch of OPAL as a secondary payload to JAWSAT on an OSC launch vehicle (maiden flight of Minotaur launcher) took place on Jan. 27, 2000 (UTC) from VAFB, CA. OPAL was attached to the multi-payload adapter of JAWSAT, built by OSSS (One Stop Satellite Solutions) of Ogden, UT. In addition to OPAL, three other free-flying satellites (ASUSat-1, OSCE, and FalconSat) were attached to the adapter and deployed within minutes of reaching orbital altitude.
Orbit: Sun-synchronous near-circular orbit, altitude = ~750 km, inclination = 97.5º, nodal crossing at 6 AM/6 PM.
Mission Status
OPAL achieved its primary mission goal, all six picosats were successfully deployed (ejection was confirmed by telemetry), the component testbeds are fully operational. Extended mission operations focus on long-term characterization of the bus and component (magnetometer) testbeds.
After launch and initial operation, OPAL has been designated as: OPAL OSCAR-38 (OO-38) by AMSAT, the Radio Amateur Satellite Corporation. OPAL remained fully operational for 29 months. In 2004, OPAL was still semi-operational. Operators were characterizing vehicle health and gathering data on the testbed payloads. Focus was on magnetometer measurements and characterization.
Sensor Complement
OPAL has three payloads: a) the Picosat Launcher and Payload as an end-to-end demonstration of a mothership / daughtership mission architecture and technology (the objective is to explore distributed sensing in space), b) the Accelerometer Testbed, and c) the Magnetometer Testbed. - OPAL mission operations are conducted from the SSDL ground station at Stanford University.
Background: The original OPAL mothership system was designed as an FFM (Free-Flying Magnetometer) mission, sponsored by JPL. In this version, the daughterships carried precision magnetometers and were similar in shape to a hockey puck. A lack of funding terminated this approach. - New sponsors were found for the picosatellite mission. The launcher was redesigned to suit the new requirements.
Picosat Launcher and Payload (research experiment and demonstration)
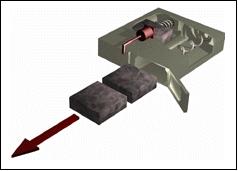
OPAL carried and ejected a total of six picosatellites: StenSat (1), PICOSAT1.0 (2), and Artemis (3) as well as three from Santa Clara University: Thelma, Louise, and JAK. The picosat launcher consists of a total of four picosat launch tubes. Each is capable of holding two short (7.5 cm x 10 cm x 2.5 cm) or one long (7.5 cm x 20 cm x 2.5 cm) picosat. Six picosat flew on OPAL, four short and two long.
A latched door with a dual-release mechanism was used to eject the picosats (single shot release and replacement of actuators). The firing was ground commandable.
Note: The three picosats are the main payload of OPAL, a technology demonstration project funded for JPL. The ultimate goal of this project is to be able to launch hundreds of picosatellites from a mothercraft in low Earth orbit - to obtain simultaneous measurements of the magnetic field over a large volume. Each picosat could measure the magnetic field and then transmit the data back to the mothercraft.
Accelerometer Testbed. Objective: Test of COTS instruments in space. Three accelerometer types, working on different measurement principles, are being tested, consisting of: a micromachined capacitor, piezoelectric crystal, and magnetic inductor.
• Capacitive sensor: The ADXL05 from Analog Devices measures changes in capacitance in a circuit etched on a silicon die.
• Piezoresistive sensor: The PCB 336M27 from PCB Piezotronics uses the piezoelectric properties of a quartz crystal to provide a measurement of acceleration (sensitivity of 1 mgal).
• Inductive sensor: The Geophones (GS-11D & GS-30CT) from GeoSpace Corporation use coil's motion with respect to a magnet to generate a signal.
Two accelerometers of each type were flown in the testbed. A stimulation source was provided to exercise the accelerometers. Characterization of the accelerometers is defined as determining short-term sensor degradation due to launch and initial exposure to the space environment.
Magnetometer Testbed. Objective: to measure OPAL's attitude (S/C alignment within 2º). A miniature 3-axis fluxgate magnetometer designed by Applied Physics Systems (model APS533). The magnetometer is enclosed in a fiberglass package and is very compact (19 mm diameter x 4 cm long cylinder, 18 grams of mass). It provides direction information to better than 0.1º, while consuming only 200 mW. It generates three voltages proportional to the magnetic field in three perpendicular directions, with an accuracy of ± 0.1%. Resolution of the magnetometer is limited by OPAL's 12 bit A/D conversion. The magnetometer can be read with a frequency of up to 1 kHz.
Characterization of the magnetometer is defined as determining short-term magnetometer degradation due to launch and initial exposure to the space environment. Also, determination of the long-term magnetometer performance degradation due to extended exposure. The magnetometer performance is measured by comparing the vector magnitude of the Earth's magnetic field as measured by the sensor to the predicted vector magnitude of standard geomagnetic modeling software.
StenSat
StenSat is a picosatellite (260 cm3 in volume, mass = 0.235 kg), developed by a group of amateur enthusiasts in the Washington DC area. The satellite structural components consist of an aluminum chassis (of size 10 cm x 7.5 cm x 2.5 cm), a magnet, top and bottom printed circuit board solar cell panels, two internal printed circuit boards (receiver/transmitter and controller), and black and white paint. One NdFeB disk magnet provides alignment and attitude control. The painting of different sides of one of the dipole antennas with black and white paint introduces a slow radiometric spin. Power is supplied by the top and bottom panel of six GaAs solar cells. Further subsystems are controller, sensors and antenna. 5)
The picosatellite is used by amateur radio operators world wide. It operates as a single channel mode ”J” FM voice repeater. The uplink frequency is 145.84 MHz and the downlink is 436.625 MHz. StenSat periodically transmits 1200 baud AX.25 for broadcasting telemetry. Additionally, amateur radio operators are able to “PING” the satellite by transmitting a six digit DTMF command to the receiver uplink.
Status: StenSat was released from the OPAL launcher on February 10th. Unfortunately, no confirmed signals have been received.
PICOSAT1.0
The PICOSAT1.0 mission of the USAF (sponsored by DARPA) was developed and built by the Aerospace Corporation, El Segundo, CA. PICOSAT1.0 is a free-flyer technology demonstration mission consisting of two tethered PICOSATs with the following objectives:
• To demonstrate the basic functional elements of a low-power LEO “swarm” or formation PICOSAT array
• To communicate from space using node-type radios and to report the results of MEMS-switched tests.
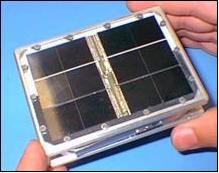
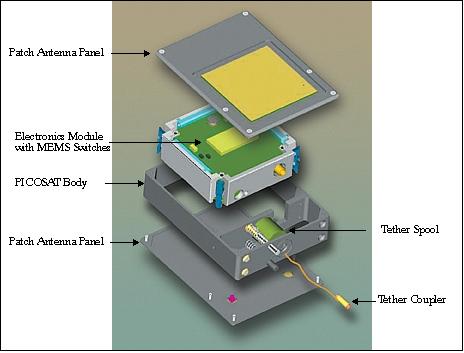
The two PICOSATs, tiny boxes of size: 25 mm x 75 mm x 100 mm, each with a mass of 0.275 kg, were ejected from OPAL's spring-loaded launcher on Feb. 6, 2000, in sight of the SRI (Menlo Park) ground station. Each PICOSAT uses a small, battery operated, very low power radio with a cross-link capability. The PICOSATs are referred to by their nodal names as PICO21 and PICO23. 6) 7)

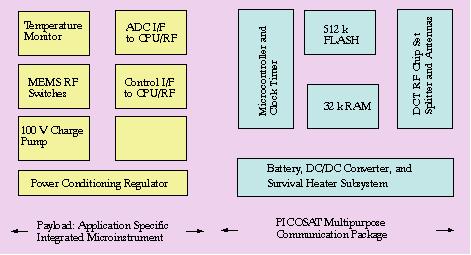
The communication system of each PICOSAT employes a receiver/transmitter system featuring: a) a spread-spectrum DCT (Digital Cordless Telephone) chip set, a COTS product of Conexant, b) a CPU/RF board design. The system is operated at 64 mW output transmit power. The store and forward communication protocol is a random-access packet system operating at a frequency of 915 MHz spread-spectrum (20 channels) with a data rate of 80 kbit/s. The satellite computer is a 6502 system (Rockwell Science Center, Thousand Oaks, CA) with a simple operating system for data collection , system management and the network protocol. Each PICOSAT is powered by three tiny Lithium Thionyl Chloride batteries with a capacity of 1 Ah each for a total of 3 Ah and a voltage of 3.65 V. The simplicity of the PICOSAT design does away with such standard spacecraft components as attitude sensors and a propulsion system.
The tether system of PICOSAT1.0, of 32 m in total length, uses a polyethylene 3-braid thread which contains 26 gold wire dipoles along its length, tuned to 430 MHz and 1 GHz. The tether was released from a tether spool right after the PICOSAT1.0 ejection from OPAL. The tether objectives are: a) to enhance system detection (the tether system serves as a dipole, enlarging the radar cross section of the assembly for a more distinctive signature and thus permitting ground detection), b) to keep the PICOSATs within range of each other (32 m max) for communication reasons (with each other and to the ground). A sensor board on each PICOSAT has a chip containing 4 MEMS RF switches (a 100 V charge pump on the sensor board is needed by the switches) that are operated in space after deployment. An A/D converter measures the resistance across each switch every time a switch occurred and records the results.
Status of PICOSAT1.0
In retrospect, the tether release mechanism worked nominally, communication was established between each PICOSAT and the ground. The ground station was able to call PICO21 or PICO23, upload instructions and download housekeeping data (temperature and MEMS switch test results). The crosslink capability was also tested, communicating from the ground indirectly with PICO23 via PICO21. Detection of the PICOSAT1.0 system from a ground-based radar system, referred to as SSN (Space Surveillance Network), was verified. The radar tracking provided also ephemeris data for orbit determination. The PICOSAT1.0 mission lasted until Feb. 9 when battery power decayed. 8)
Artemis
Artemis is a set of three picosatellites (Thelma, Louise, and JAK) provided by undergraduate engineering students of Santa Clara University, Santa Clara, CA. The mass of Artemis is < 1kg by utilizing a commercial microprocessor, transmitting on amateur radio frequencies from the picosatellite to ground, and using commercial off-the-shelf batteries to power the picosatellite. The primary mission of the OPAL picosatellite payload is to provide an end-to-end mission demonstration of mothership and daughtership technologies. 9) 10) 11)
The structure of two Artemis picosats is of size: 20 cm x 2.5 cm x 7.5 cm with a mass of 0.611 kg. The two picosats consist of the following subsystems:
• VLF (Very Low Frequency) Receiver. The VLF receiver board is the main payload aboard Artemis. The objective is to research the effects of lightning on the outer ionosphere. Measurements are taken by using the VLF radio signals traveling between the ground and the S/C. Lightning discharges and the effects on the Earth's near space environment can be recorded with the VLF receiver. The VLF receive frequency range is 0.1-12 kHz, with 5 kHz considered typical of a lightning strike. The two picosatellites have different VLF thresholds, namely 100 mV and 10 mV respectively. Measurements are taken simultaneously by both picosatellites. Comparison of the data permits the extraction of the occurrence and amplitudes of horizontal and vertical lightning.
• Power is provided by GaAs solar cells and two NiCd batteries, rated at 1.25 V and 800 mAh.
• A microcontroller provides the necessary functionality to check for adequate battery supply, read sensors, read and log pulses from the VLF receiver, transmit using FSK modulation, and receive commands sent from ground.
• Attitude is determined by four VNIR phototransistors, mounted perpendicular to each other. Rubber ferrite magnets are used as actuators to control the spin axis, aligning it relative to the Earth's magnetic field.
• The communications subsystems transmits and receives over amateur radio frequencies. The data rate is 1.2 kbit/s.
The third picosat, named JAK, was a simple beacon transmitter designed to test the ground reception ability of spaceborne picosat broadcasts.
Mission operations: The picosatellites deploy their communication and VLF antennas after ejection from the mothership OPAL. Both picosatellites broadcast their call-signs once per minute for tracking purposes. Upon a command reception, the CPU initiates the VLF experiment by enabling the VLF receiver. The experiment is carried out in one minute during which the CPU counts the number of pulses the receiver detects above the threshold voltage. The measured data are downlinked in the next (and follow-up) broadcast until the next command is received.
Status of Artemis
JAK was ejected with StenSat on Feb. 10 (both of them were stored in the same launch tube). No reception of JAK's beacon signals was confirmed. The limited battery life of JAK ended soon all communication attempts. The two VLF picosats (Thelma and Louise) were released on Feb. 12, 2000. However, no signals could be confirmed.
References
1) James Cutler, Greg Hutchins, Robert Twiggs, “OPAL: Smaller, Simpler, and Just Plain Luckier,” Proceedings of the 14th AIAA/USU Conference on Small Satellites, Logan UT, Aug. 21-24, 2000, SSC-VII-4, URL: http://www.space.aau.dk/cubesat/documents/pdf-docs-from-net/SmallSat2000-Opal.pdf
2) Dana S. Clarke, Michael T. Hicks, Alissa M. Fitzgerald, Jason J. Suchman, Robert J. Twiggs, J. Randolf, Thomas W. Kenny, “Picosat Free Flying Magnetometer Experiment,” Proceedings of the 10th Annual AIAA/USU Conference on Small Satellites, Sept. 16-19, 1996
3) Hank Heidt, Jordi Puig-Suari, Augustus S. Moore, Shinichi Nakasuka, Robert J. Twiggs, “CubeSat: A new Generation of Picosatellite for Education and Industry Low-Cost Space Experimentation,” Proceedings of the 14th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 8-11, 2005, paper: SSC00-V-5, URL: http://www.space.aau.dk/cubesat/documents/CubeSat_Paper.pdf
4) J. Cutler, G. Hutchins, C. Kitts, R. Twiggs, “Infrastructure for Internet-Based Operations,” Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 21-24, 2000, SSC00-IX-4
5) Hank Heidt, Kevin Doherty, StenSat Journal (Our Experience Building a Picosatellite),” URL: https://web.archive.org/web/20160304042850/http://www.stensat.org/Publications/stensat_Journal.pdf
6) “The Aerospace Corp.: Communications Established With Smallest Satellites Ever Placed Into Orbit,” Feb. 8, 2000, URL: : http://findarticles.com/p/articles/mi_m0EIN/is_2000_Feb_8/ai_59241795
7) David Hinkley, Siegfried Janson, “Building Miniature Spacecraft at The Aerospace Corporation,” Crosslink, Volume 10, No 1, Summer 2009, URL: http://www.aero.org/publications/crosslink/summer2009/06.html
8) Information provided by Ernest Y. Robinson and by David A. Hinkley of the Aerospace Corporation.
9) M. F. Breiling, C. Y. Hu, M. Breiling, A. Slaughterbeck, J. Ota, D. Haidi, T. Kuhlman, S. Lyons, “The ARTEMIS Project: Picosatellite-Based Missions to Study VLF Phenomenon,” Proceedings of the 13th AIAA/USU Conference on Small Satellites, Aug. 23-26, 1999, Logan UT, SSC99-VIII-3
10) https://web.archive.org/web/20190804232411/http://screem.engr.scu.edu:80/artemis/
11) A. Valdez, C. Hu, C. Kitts, et al., “The Artemis Project: Picosatellites and the Feasibility of Smaller, Faster, Cheaper Approach,” Proceedings of the IEEE Aerospace Conference, Snowmass, Co, March 6-13, 1999
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).