RemoveDebris Mission
Non-EO
On Orbit Servicing
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 02 Apr 2018 |
RemoveDebris Mission
Platform Launch Mission Status DebrisSats Payload Ground Segment References
RemoveDebris is an EU (European Union) Framework 7 (FP7) research project to develop and fly a low cost in-orbit demonstrator mission that aims to de-risk and verify technologies needed for future ADR (Active Debris Removal) missions. It is not an end-to-end demonstration of a full ADR mission. However, it will demonstrate the use, on-orbit, of some of the key aspects of a ‘real’ ADR mission. 1) 2)
RemoveDebris is aimed at performing key ADR technology demonstrations (e.g., capture, deorbiting) representative of an operational scenario during a low-cost mission using novel key technologies for ADR. The project is based on and aimed at contributing to global/European ADR roadmaps.
A microsatellite called here RemoveSAT, will release, capture and deorbit two space debris targets, called DebrisSats, in sequence using various rendezvous, capture and deorbiting technologies thus demonstrating in orbit, key ADR technologies for future missions in what promises to be the first ADR technology mission internationally. 3) 4) 5) 6) 7) 8)
The debris objects themselves in this case will be released by the main satellite with subsequent recapture. Although this is not a fully-edged ADR mission, the project is an important step towards a fully operational ADR mission. The ultimate goal of this activity is to protect space assets from space debris and to minimize the collision risk of current and future space missions as the FP7 call for space calls for.
Institution/Affiliation | Project Role |
University of Surrey – Surrey Space Centre (SSC), UK | Project coordinator, CubeSat development and de-orbit technology development, Dragsail, HTA (Harpoon Target Assembly) |
Surrey Satellite Technology Ltd (SSTL), UK | Satellite platform provider, satellite operations |
Airbus Defense and Space (AD&S), Germany, France, UK | Mission and System Engineering, Net development, VBN (Vision Based Navigation) development, HTA payload development |
Innovative Solutions in Space BV (ISIS), Delft, The Netherlands | CubeSat deployers and subsystems |
Suisse d'Electronique et de Microtechnique SA - Recherche et Development (CSEM), Switzerland | LiDAR camera |
Institut National de Recherche en Informatique et en Automatique (INRIA), France | VBN (Vision Based Navigation) algorithms |
Stellenbosch University – Electronic System Laboratory (ESL), South Africa | CubeSat ADCS hardware and software |
Some Background
One of the most active in the field of debris removal is ESA (European Space Agency). ESA has produced a range of CleanSpace roadmaps, two of which focus on (a) space debris mitigation and (b) technologies for space debris remediation. A main part of these roadmaps is e.Deorbit, a program spanning a host of phase studies examining removing a large ESA-owned object from space, namely Envisat. 9) 10)
This initiative started with ESA's SOADR (Service Orientated ADR) Phase 0 study involving the analysis of a mission that could remove very heavy debris from orbit examining both the technical challenges and the business aspects of multiple ADR missions. Progressing on, ESA has also now completed Phase A and Phase B1 studies, with several more mature designs now available. ESA's SSBB (Satellite Servicing Building Blocks) study originally examined remote maintenance of geostationary telecommunications satellites using a robotic arm. The French space agency, CNES, is also widely involved in debris removal and has funded studies such as OTV which traded-off different ADR mission scenarios.
Regarding the development of capture technologies, there are several on-going efforts. Airbus DS capture designs include the robotic arm, net, and harpoon demonstrators for use in space. The First European System for Active Debris Removal with Nets (ADR1EN) is testing net technologies on the ground with the aim of commercializing later on. A host of other capture technologies have also been proposed including: ion-beam shepherd, gecko adhesives and polyurethane foam. Aviospace have been involved with some ADR studies such as the CADET (Capture and De-orbiting Technologies) study which is examining attitude estimation and non-cooperative approach using a visual and infrared system and the HADR (Heavy Active Debris Removal) study that examined trade-offs for different ADR technologies, especially including flexible link capture systems.
Although recently there have been advances in relative space navigation, the complex application of fully uncooperative rendezvous for debris removal has not yet been attempted. VBN (Vision-Based relative Navigation) systems, which would be necessary for future debris removal missions are currently being developed and will be demonstrated on RemoveDebris. Other recent research specifically related to VBN for debris removal includes: TU Dresden, Thales, and Jena-Optronik.
Regarding rendezvous in space, the ATV (Autonomous Transfer Vehicle) of JAXA was one of the first times a spacecraft initiated and commenced a docking maneuver in space in a fully autonomous mode. The ETS-VII (Engineering Test Satellite VII) , alias KIKU-7, by JAXA in 1997 was one of the first missions to demonstrate robotic rendezvous using chaser and target satellites . The ADRV (AoLong-1 `Roaming Dragon' Vehicle) was also recently launched by CNSA (China National Space Administration) in 2016 in order to test target capture with a robotic arm; results are presently not available. Most recently JAXA's HTV-6 vehicle, which launched in early 2017, unsuccessfully attempted to deploy an electrodynamic tether under the KITE (Kounotori Integrated Tether Experiment. 11)
Upcoming missions to tackle debris removal include CleanSpace One by EPFL (Ecole Polytechnique Federale de Lausanne), Switzerland, which aims to use microsatellites with a grabber to demonstrate capture. 12) The mission is still under design and launch is not foreseen for a few years. As mentioned previously, ESA's e.Deorbit will likely result in a large scale mission and is currently proposed for 2023. Of interest is AstroScale, a company based in Singapore, aiming to launch a mission with thousands of `impact sensors' to build up knowledge of the magnitude of small fragments.
RemoveDebris mission overview
• The mission has as its primary aim, the raising of Technology Readiness Levels (TRL), and gaining on-orbit experience with:
- A debris capture system based on a Net
- A debris capture system based on a Harpoon
- Visual Based Navigation (VBN) using Optical, Infrared and LIDAR cameras
- Deployable drag augmentation devices (Sails)
• The core concept behind the mission, is to use a small-satellite (~100kg) as a ‘mothership’, on which the payloads are carried, and from which CubeSats (~3 kg) are released and used as ‘pseudo-debris’ targets
• Mission aims to launch in Q3 2016. Currently in detailed design phase, with advanced bread-boarding and engineering model testing underway.
• The “RemoveDebris” mission obviously does not want to produce any excess debris in orbit from its activities.
• The current mission baseline is therefore to fly the mission at low altitude (<400km) where orbital residence times for the different parts of the mission will be low (<3 years)
• Parts of the mission involving close proximity operations between the mothership and CubeSats have been designed to be passively safe (objects will naturally drift apart).
• The consortium is in discussions with several launch providers and no launch has been yet selected.
• One potential option is the US company NanoRacks to obtain a launch from the International Space Station (ISS).
In-orbit Demonstrations
1) Net experiment: The net scenario is shown in Figure 1 and is designed to help mature net capture technology in space. In this experiment, initially the first CubeSat (net), DSAT-1 (DebrisSat-1), is ejected by the platform at a low velocity (~ 0.05 m/s). DSAT-1 proceeds to inflate a balloon which, as well as acting as a deorbiting technology, provides a larger target area. A net from the platform is then ejected at the balloon. Once the net hits the target, deployment masses at the end of the net wrap around and entangle the target and motor driven winches reel in the neck of the net preventing re-opening of the net. The CubeSat is then left to deorbit at an accelerated rate due to the large surface area of the balloon.

2) Harpoon experiment: The harpoon scenario is shown in Figure 2. In this experiment, the second CubeSat (harpoon), DSAT-2, is ejected by the platform at a low velocity. Shortly after ejection, the CubeSat releases target panels to increase the target surface area. The platform GNC system aligns the harpoon with the center of the CubeSat then fires the harpoon. The harpoon is designed with a flip-out locking mechanism that prevents the tether from pulling out of the CubeSat. The CubeSat is then left to deorbit.

3) VBN experiment: The VBN experiment is shown in Figure 3. In this experiment, the third CubeSat (harpoon), DSAT-3, is ejected by the platform. The VBN system (including LiDAR) uses the previous net and harpoon experiments to calibrate itself. A series of maneuvers are then undertaken allowing the VBN system and supervision cameras to collect data and imagery which are later post-processed on ground.
Other Experiments: The RemoveDebris mission, in addition to performing the three primary experiments, also aims to test a few other developed technologies. These include the EP (Electric Propulsion) system and a 10 m2 dragsail. These experiments are to be performed after the primary experiments and are explained in further depth in the payload section.
Spacecraft
The RemoveDebris platform, RemoveSat, is a derivative of SSTL’s next generation small satellite platforms, the SSTL X50 series. The RemoveDebris mission provides an excellent opportunity to demonstrate the capabilities of this new platform. The X50 series platform is built on 30 years of experience and success in SSTL of breaking low cost barriers and delivering operational level performance in small satellite packages. The X50 architecture is based on a modular and expandable philosophy that utilizes common modules. This allows the system to be adaptable to varying mission applications and requirements.
Mass | ~100 kg |
Envelope | 0:65 m x 0:65 m x 0:72 m |
Downlink, uplink | 2 Mbit/s (S-band), 19.2 kbit/s |
Payload mass, payload power | ~40 kg, 8 W OAP (high peaks possible) |
Pointing knowledge | ~2.5º |
ΔV | Up to 6 m/s |
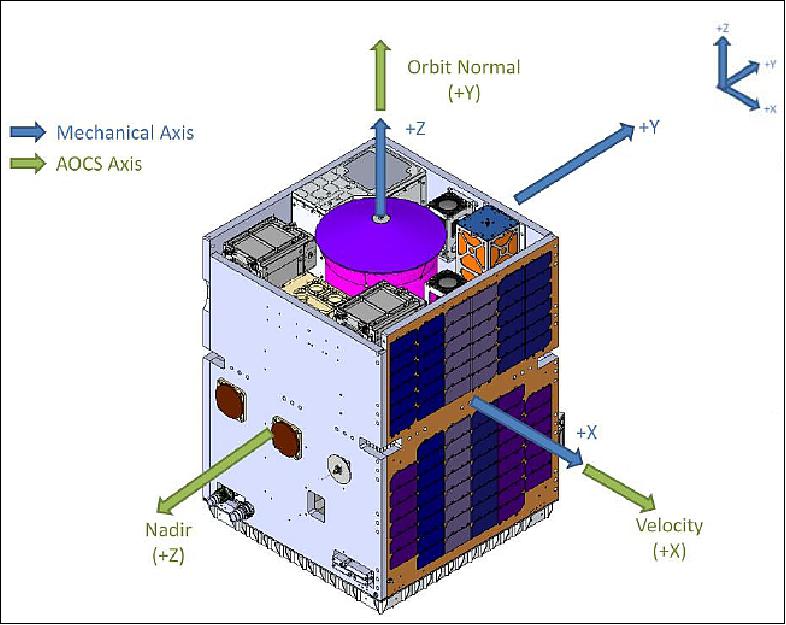
The platform, shown in Figure 4 and Figure 5, is based on four side panels, a payload panel, and a separation panel. The payloads are mounted either on the payload panel within the payload volume atop the avionics bay or along the side panels as required. The side and payload panels are made from aluminum honeycomb sandwich panels while the separation panel is made out of machined aluminum. Three of the four side panels are also populated with solar cells to provide power throughout the orbit. Below the payload panel is the platform avionics bay where the platform subsystems are housed. This includes items such as magnetometers, magnetorquers, reaction wheels, gyros, on-board computers, GPS receiver, X50 avionics stack, and batteries.
The X50 avionics system builds on the modular and expandable philosophy and also improves manufacturability, integration, and testing. The avionics system is based on a card-frame structure with backplane interconnections. This results in far less labor to interconnect the modules and also simplifies integration and module insertion and replacement. The new modules that have been developed for the X50 avionics include: PDM (Power Distribution Module), BCM (Battery Charge Module), STRx (S-band Transmitter/Receiver), PIU (Payload Interface Unit), CAN bridge, ADCS and data handling elements all accommodated in card format within a single card frame assembly. Redundancy of primary systems (transceiver, Power BC, OBC) is achieved through simple duplication of the relevant cards. The card frame assembly is completed by means of a card frame which provides interfaces and connections between all of the core avionics elements, whilst also reducing platform harness mass and complexity.
The remainder of the platform is made up of heritage SSTL subsystems and equipments. A full equipment list for the platform is included in Table 4.
Equipment | Quantity | Equipment | Quantity |
ADCS |
| GPS |
|
RF Communications (S-band) |
| Power |
|
Propulsion |
|
|
|
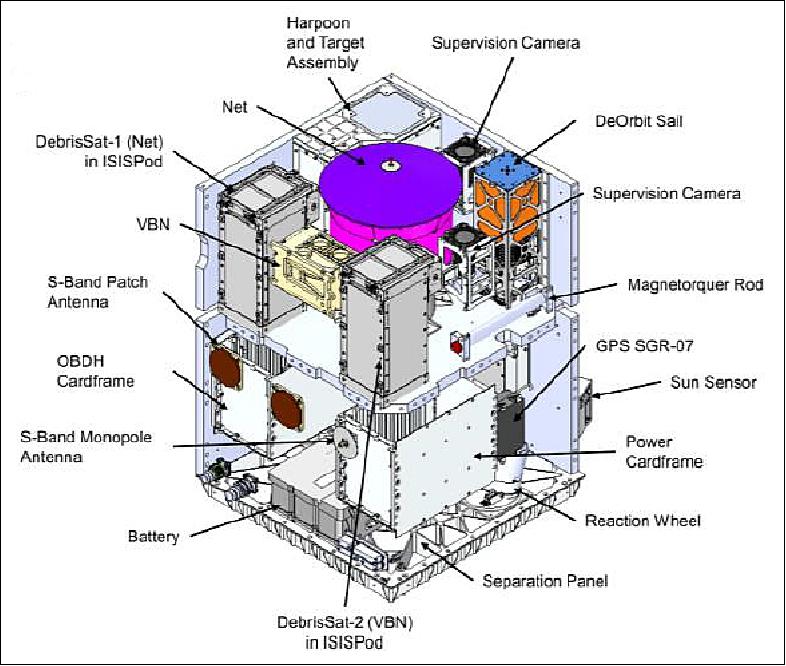
The RemoveDebris platform design accommodates the majority of the platform avionics and equipments in the lower half of the spacecraft, with the upper half of the spacecraft primarily dedicated to accommodating the RemoveDebris payloads. The spacecraft configuration can be seen in Figure 7.
Accommodation study: The RemoveDebris platform design accommodates the majority of the platform avionics and equipments in the lower half of the spacecraft, with the upper half of the spacecraft primarily dedicated to accommodating the RemoveDebris payloads. The upper bay of the platform accommodates all of the RemoveDebris payloads, in line with the mission profile and operations concept which essentially requires all payloads to be deployed in the same direction (and monitored in that direction).
Design principles and drivers: The X-Series platforms are being developed with some key drivers and principles in mind. These are a combination of (a) principles that SSTL have employed successfully in delivering small satellites in the last 25 years, and (b) new approaches that are enabled by SSTL’s evolution as a company in the last 10 years, specifically the recently developed in house capabilities for batch/mass production and automated test. These key drivers and principles can be summarized as follows:
• The use of mature, well developed non space specific protocols such as CAN (Controller Area Network)and LIN (Local Interconnect Network).
• On board autonomy, resulting in the elimination of the need for expensive, constantly manned ground segments.
• Robustness and redundancy; simple and robust operational modes that deliver competitive payload availability performance with multiple backup functionality and equipments on board to assure mission lifetime and guard against unforeseen and random outages and failures.
• The use of COTS (Commercial-off-the-Shelf) components and technologies building on over 25 years of successful implementation on operational missions.
• Modularity; investing the development of only a few key new systems that can be arranged in configurations to deliver a wide variety of performance and capacity variations depending on mission requirements.
• Low recurrent costs at unit level; maximizing the use of automated manufacture and test capabilities to reduce expensive manpower costs, thereby achieving an extremely low unit level cost.
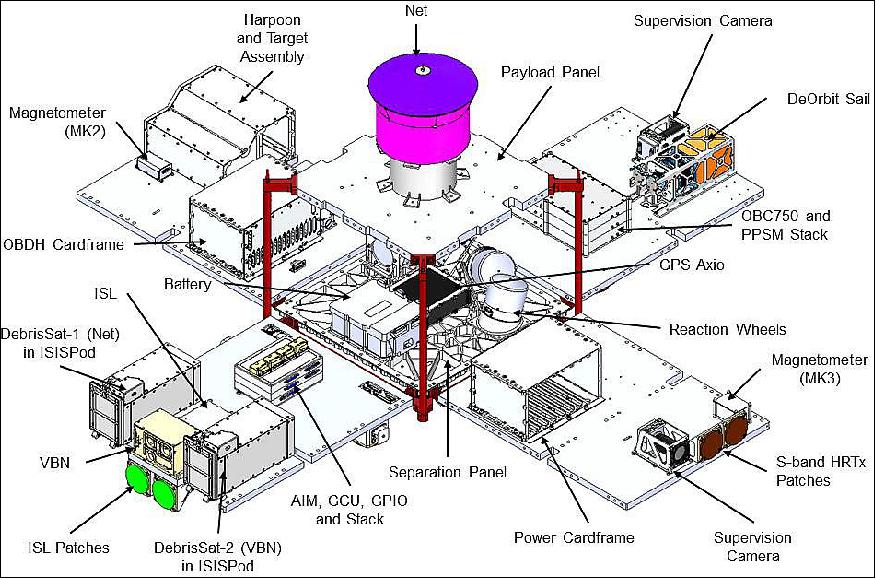
The main RemoveSat spacecraft uses the X50M variant structure, shown in Figure 7, and is based on the X50 platform and avionics, with modifications to meet the mission specific requirements. The core avionics comprises the systems required to support the payloads, including power system, communications, and data handling.
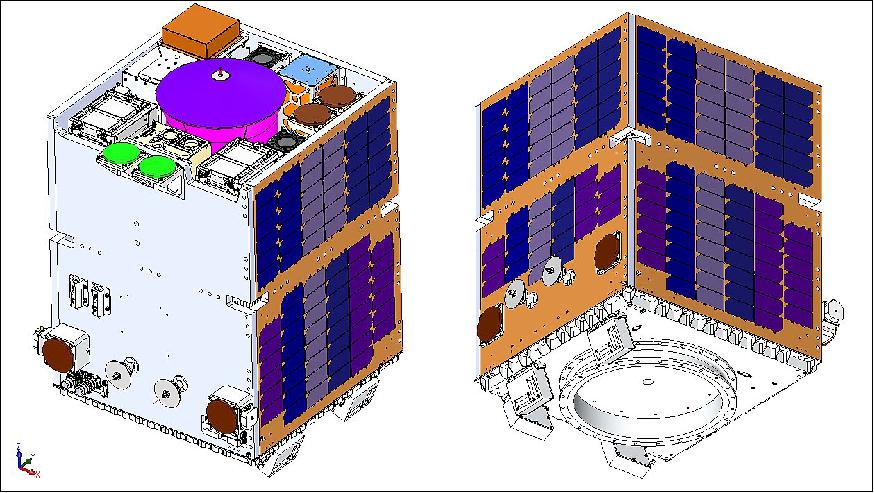
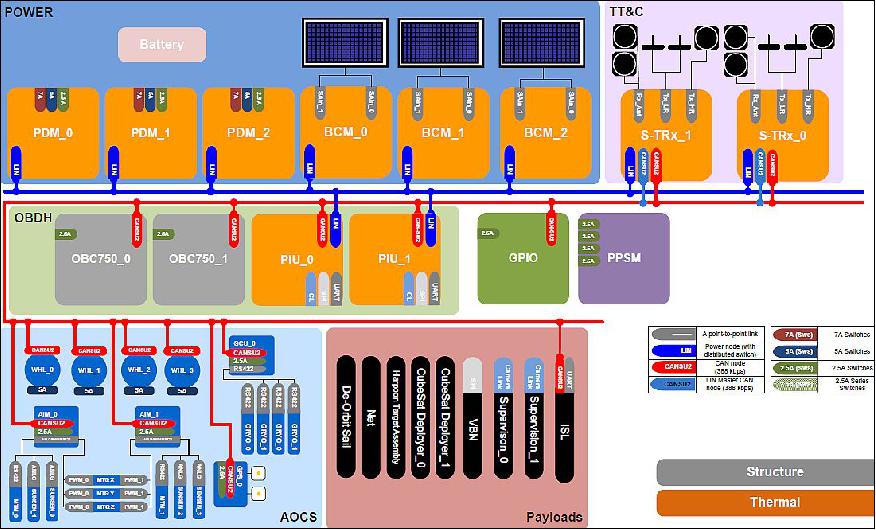
Figure 8 shows the system block diagram for RemoveDebris and shows the different subsystem elements and their interactions. The system block diagram uses the typical subsystem division used by SSTL. The different subsystems defined are:
Payloads:
• 2 x Payload Interface Unit
• 1 x Net capture system
• 1 x Harpoon capture system
• 2 x CubeSat Deployers
• 2 x CubeSats (DebrisSat 1 & DebrisSat 2)
• 1 x HTA (Harpoon Target Assembly)
• 1 x Intersatellite Link
• 1 x VBN (Visual Based Navigation) system – includes LiDAR and 2D camera
• 2 x Supervision cameras
Communications: Telemetry/Telecommand/Data for the platform
• 2 x S-band transceivers – includes receiver, low rate (38.4 kbit/s) and high rate (2-4 Mbit/s) transmitters
AOCS (Attitude and Orbit and Control Subsystem):
• 2 x AIM (AOCS Interface Modules)
• 3 x Magnetorquers (MTQ-5)
• 4 x Sun Sensors (SS)
• 2 x 3-axis Magnetometer (MTM)
• 4 x 10SP Reaction Wheels (RW)
• 1 x Space GPS Receivers (SGR-Axio)
• 1 x Gyro Control Unit (GCU)
• 4 x Gyros
OBDH (On-Board Data Handling):
• 2 x OBC750
• 1 x GPIO (General Purpose Input/Output) board
EPS (Electrical Power Subsystem):
• 3 x Battery Charge Modules
• 3 x Power Distribution Modules
• 3 x Solar panels
• 1 x Li-Ion Battery
• 2 x LIN bus
• 1 x PPSM (Payload Power Supply Module)
There is a CAN (Controller Area Network) bus that is distributed across the spacecraft and is used to transmit and receive data from other CAN connected elements. In addition to the CAN bus, the X50 avionics introduces a dual redundant LIN (Local Interconnect Network) bus used to communicate between the power system modules and distributed switches. The LIN master on the STRx card is used to bridge the telemetry and telecommands between the LIN and CAN buses.
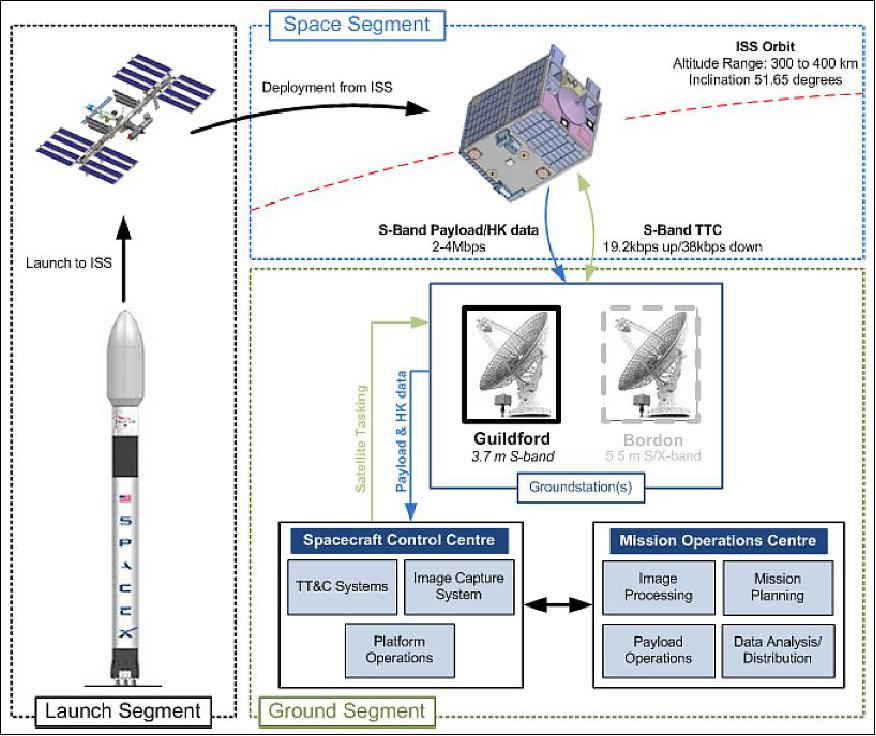
Payload and housekeeping data will be stored on board the satellite and will be transmitted to the ground via its S-band downlink antenna to the ground stations based in Guildford, UK. A larger ground station is also available either as a backup or as the main ground station in Bordon, UK. The 2-4 Mbit/s downlink rate is readily supported by the X50 S-band transceiver and the heritage ground station equipment. Telecommand and Telemetry uplink and downlink are via a low rate S-band system. LEOP and emergency communications are also performed using the low rate S-band system.
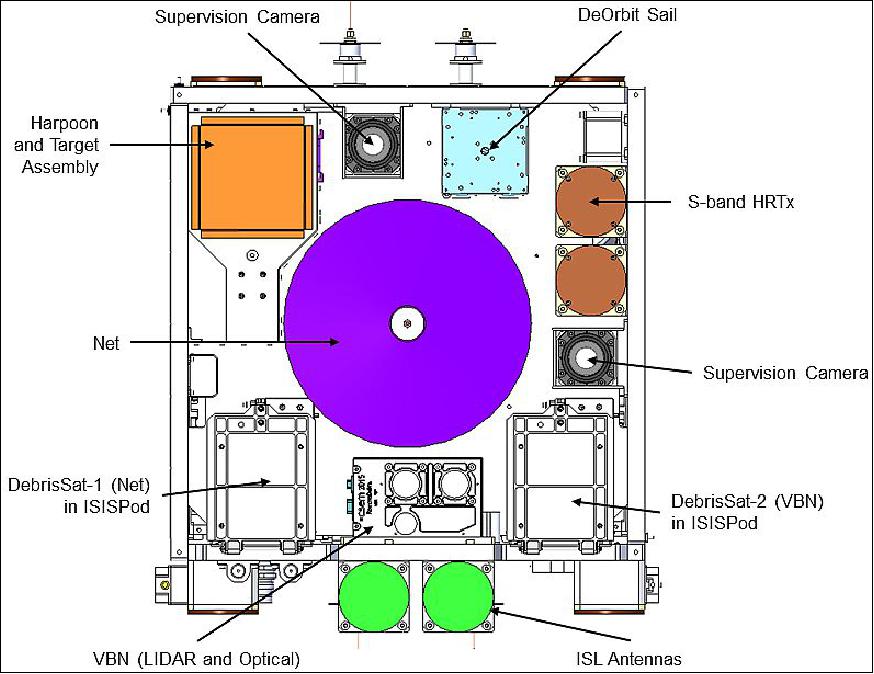
Payload Panel Layout: Most of the payloads are attached to the side panels above the payload panel (Figure 9). The net payload is attached to the payload panel via a cylindrical tube. The net is placed as close as possible along the CoG axis in order to reduce any rotation torques as it is deployed. The locations of the CubeSat deployers are placed in close proximity to the other payloads required for their respective demonstrations. For example, the CubeSat dedicated for the net demonstration is close to the net payload, while the VBN dedicated CubeSat is close the VBN sensor and ISL. The location and angle of attachment of the supervision cameras are optimized to provide the best possible view of all of the demonstrations.
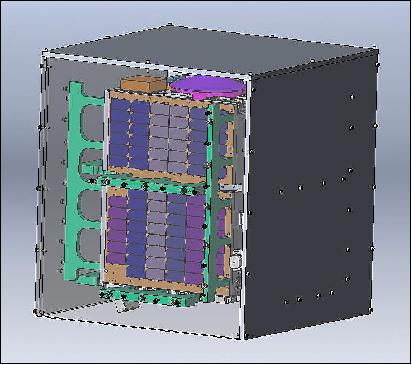
Platform Internal Configuration and AIT (Assembly, Integration and Test): Figure 10 shows the platform in an open configuration; this is how the platform will be built up in stages during the AIT phase. The first thing that gets brought to the integration table is the separation panel. The side panels then get attached, via hinges, to the separation panel and are supported by the integration table in an open “flower petal” configuration. Payload panel support rods (the red colored rods shown in Figure 10) are then attached to the separation panel. This allows the payload panel to be attached on top. With all the main structural panels in place, the subsystems and payloads can be integrated one-by-one to the spacecraft. In this configuration, the platform can be slowly soft-stacked allowing for fit checks, interface tests, and system end-to-end tests to be completed.
For the final hard-stack, all payload and subsystem bolt fixings to the structure are torqued to appropriate levels and head-staked. The side panels are then folded up and bolted to the payload panel one-by-one. The hinge joints and the payload panel support rods are removed from the structure. The final structural bolts are torqued and head-staked and the platform is ready for integration into the launch container ready for transport.
Development Status
• December 18, 2017: SSTL has shipped the RemoveDebris spacecraft to the Kennedy Space Center in Florida for launch to the ISS (International Space Station) inside a Dragon capsule on board the SpaceX CRS-14 resupply mission, a service provided through supply agent, NanoRacks. 13)

Launch
The RemoveDebris microsatellite was launched on 2 April 2018 (20:30 UTC) with the Falcon-9/Dragon vehicle of SpaceX CRS-14 (cargo delivery). The launch site was Cape Canaveral Air Force Station, FL. 14) 15) The flight is being conducted under the Commercial Resupply Services contract with NASA. 16)
This flight delivers scientific investigations looking at severe thunderstorms on Earth, the effects of microgravity on production of high-performance products from metal powders, and growing food in space. Dragon also carries cargo for research in the National Laboratory, operated by CASIS (Center for the Advancement of Science in Space), including testing the effects of the harsh space environment on materials, coatings and components; identifying potential pathogens aboard the station; and investigating an antibiotic-releasing wound patch.
Dragon is packed with 2625 kg of research, crew supplies and hardware to be delivered to the station:
ASIM (Atmosphere-Space Interactions Monitor), an ESA science instrument (314 kg) to be installed on the Columbus External Platform Facility (CEPF). ASIM surveys severe thunderstorms in Earth’s atmosphere and upper-atmospheric lightning, or transient luminous events. These include sprites, flashes caused by electrical break-down in the mesosphere; the blue jet, a discharge from cloud tops upward into the stratosphere; and ELVES, concentric rings of emissions caused by an electromagnetic pulse in the ionosphere.
RemoveDebris is an EU Framework 7 (FP7) funded research microsatellite (100 kg), low cost in-orbit demonstrator mission for future ADR (Active Debris Removal) missions. The project is a partnership of SSC (Surrey Space Center) and NanoRacks. SSC leads a consortium of partners [Airbus, Ariane Group, SSTL, ISIS (Netherlands), CSEM (Switzerland), Inria (France), Stellenbosch University (South Africa)]. This project will use the NanoRacks RemoveDEBRIS satellite platform to deploy two CubeSats as artificial debris targets to demonstrate four technologies for debris removal (net capture, harpoon capture, vision-based navigation). RemoveDebris will be deployed, via the NanoRacks Kaber system. Once in orbit the ADR experiments on board the spacecraft will be performed. 17)
MISSE-FF (Materials ISS Experiment Flight Facility) with MSCs (MISSE Sample Carriers) in the fully open position exposing samples/experiments to the harsh environment of space in LEO (Low Earth Orbit). Designed by Alpha Space and sponsored by CASIS, MISSE-FF provides a platform for testing how materials react to exposure to ultraviolet radiation, atomic oxygen, ionizing radiation, ultrahigh vacuum, charged particles, thermal cycles, electromagnetic radiation, and micro-meteoroids in the low-Earth orbit environment. MISSE-FF has a mass of ~435 kg.
The MSL SCA-GEDS-German (NASA Sample Cartridge Assembly-Gravitational Effects on Distortion in Sintering) experiment focuses on determining the underlying scientific principles to forecast density, size, shape, and properties for liquid phase sintered bodies over a broad range of compositions in Earth-gravity (1g) and microgravity (µg) conditions.
Wound Healing. NanoRacks Module 74 Wound Healing tests a patch containing an antimicrobial hydrogel that promotes healing of a wound while acting as a scaffold for regenerating tissue. Reduced fluid motion in microgravity allows more precise analysis of the hydrogel behavior and controlled release of the antibiotic from the patch.
The Canadian Space Agency’s study Bone Marrow Adipose Reaction: Red or White (MARROW) will look at the effects of microgravity on bone marrow and the blood cells it produces – an effect likened to that of long-term bed rest on Earth. The extent of this effect, and bone marrow’s ability to recover when back on Earth, are of interest to space researchers and healthcare providers alike.
Understanding how plants respond to microgravity also is important for future long-duration space missions and the crews that will need to grow their own food. The PONDS (Passive Orbital Nutrient Delivery System) arriving on Dragon uses a newly-developed passive nutrient delivery system and the Veggie plant growth facility currently aboard the space station to cultivate leafy greens. These greens will be harvested and eaten by the crew, with samples also being returned to Earth for analysis.
Additional CubeSat Missions of CRS-14
Irazú, a 1U CubeSat of ACAE and ITCR (Costa Rica Institute of Technology). Irazu is a technology demonstration mission (1 kg) of ITCR.
UBAKUSAT, a joint Turkish and Japanese 3U Cubesat (4 kg) technology demonstration mission, built by ITU (Istanbul Technical University), Istanbul, Turkey in cooperation with JPF (Japan Space Forum), and KIT (Kyushu Institute of Technology).
Overview-1A, a 3U CubeSat (4.2 kg) of SpaceVR (Space Virtual Reality), a crowd-funded mission based on a Pumpkin platform, USA. The goal is to allow users to ‘experience space firsthand’ using any mobile, desktop, or virtual reality device.
1KUNS-PF (1st Kenyan University NanoSatellite-Precursor Flight), a 1U CubeSat developed at the University of Nairobi, Kenya in collaboration with “La Sapienza” University of Rome and ASI (Italian Space Agency). A technology demonstration mission.
Orbit: Near-circular orbit, altitude = 400 km, inclination = 51.6º.
Originally, the RemoveDebris mission was intended to be flown on a traditional launcher into a higher SSO (Sun-Synchronous Orbit). However, the mission baseline has been revised to take into account feedback from international and national space policy providers in terms of risk and compliance and a potential launch option has been found: deployment from the ISS (International Space Station). Work is on-going with NanoRacks to define the details (Ref. 5).
To be deployed from the ISS, the satellite must first get there. This is done by loading the RemoveDebris platform onto a resupply mission to the ISS. The RemoveDebris satellite will be shipped in a launch box. The launch box serves two main purposes:
- Protect spacecraft during shipping, launch, and handling aboard the ISS
- Protect astronauts from protrusions and sharp edges during handling aboard the ISS.
The launch box will be wrapped in foam and affixed to the side walls in the cargo hold of the resupply mission via straps. It will then be launched to the ISS where it will be removed from the cargo hold by the astronauts and stored aboard the ISS until time for deployment.
SSTL is working with NanoRacks to define the launch box interface with the satellite. The X50 platform has been adapted to directly interface with the launch box via braces all along the satellite; see the green brackets in Figure 12. This is different from a traditional launch configuration where the platform is hard mounted to the launcher through one interface point (i.e. the deployment system) on the separation panel. This configuration allows the loads to be distributed across the spacecraft and reduces the interface loads seen by the payloads. The foam around the box during the launch will damp out any excess vibrations as well.
Deployer Accommodation: Once the launch box has been unpacked from the resupply vehicle, it will be stored on board the ISS until time of deployment. When the satellite is ready to be deployed, an astronaut will move the launch box into the JEM ( Japanese Experiment Module) of the ISS. Here the astronaut will position the launch box onto the small satellite deployment system, called Kaber, within the JEM airlock.
The Kaber is a self-contained satellite deployer system that provides an interface between the JEM airlock slide table and the ISS SPDM (Special Purpose Dextrous Manipulator). Kaber consists of the separation system mount plate and the avionics/drive mechanism compartment and adapter ring. The Kaber is stowed in the ISS for reuse for each small satellite deployment mission. 18)
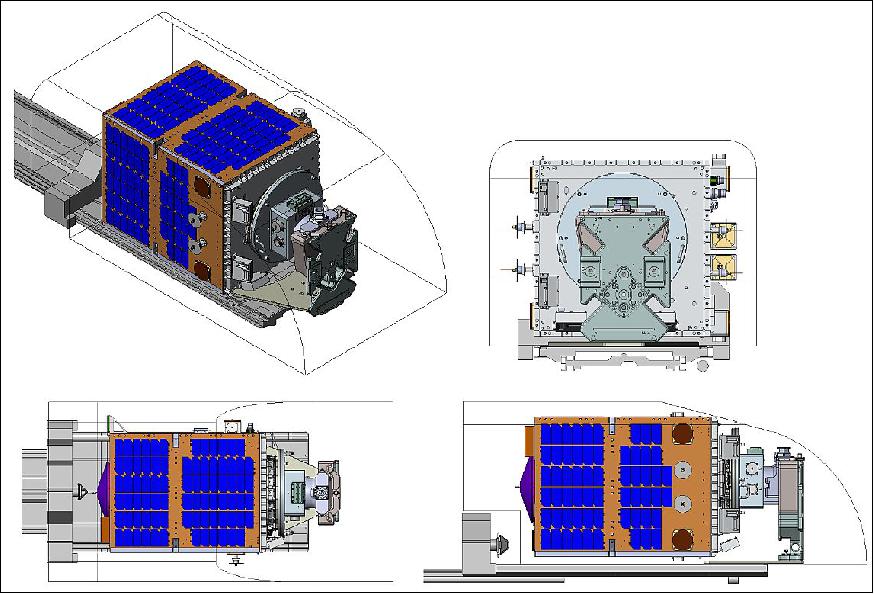
Once the platform is integrated to the slide table, the external launch box is fully disassembled and the support brackets are removed from the platform by the astronaut. The platform is then slit into the JEM fairing and the airlock closed behind it. Figure 13 shows a variant of the X50M platform (used for RemoveDebris) within the JEM fairing for a fit check. The platform had to be reduced in height and footprint in order to be able to fit within this fairing. This was done by reducing the thickness of the separation panel, reorganizing the sensors and antennas of the platform, and also reorganizing the payload panel accordingly.
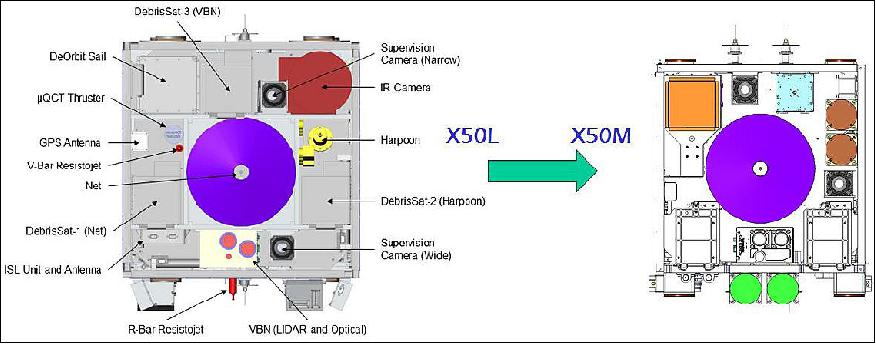
Volume reduction: The original platform envisioned for the RemoveDebris mission was the X50L variant. However, as the mission evolved, a smaller platform was required to be compliant with the launch opportunities available. The modularity and scalability of the X50 series meant that the platform was able to accommodate these changes late into the design cycle. The original X50L configuration had an overall dimension of 620 x 620 x 780 mm with a total mass of 150 kg, including all payloads and propellant. The revised baseline platform is 550 x 550 x 760 mm in overall dimension with a mass of approximately 100 kg. Figure 14 shows the change from the X50L baseline to the X50M baseline.
Mass reduction: In addition to the platform’s overall dimensions being scaled in order to comply with the ISS launch constraints, the mass also had to be reduced in order to be able to use the ISS deployment system. This was accomplished by reducing the payload manifest, simplifying some of the original demonstrations, and moving to smaller reaction wheels.
However, more mass reduction was required. This was done by a mass lightening exercise on the platform structure. The platform still had to keep the option open to be launched from various other launchers as well. The launch configurations from a traditional launch vehicle and a resupply vehicle to the ISS have completely different requirements. The traditional hard mounted launch configuration has higher loads that the platform structure has to be able to survive. This meant the platform structural panels, especially the separation panels, had to be made more robust and was therefore more bulky. However, this was not compatible with the ISS launch since it meant the platform was too tall and too heavy.
The mass lightening of the structure had to be done carefully and two options were arrived upon. One was to reduce the thickness of the separation panel (which was originally a webbed, machined aluminum panel, designed to withstand various launchers including a side launch configuration) to 30 mm with ISS deployment specific mounts. The thinner panel along with the mounting configuration in the launch box is sufficient to survive the launch loads expected in a soft ride to the ISS. However, if a more traditional launch emerges, it is possible to revert back to the thicker more robust separation panel without having to dismantle the whole spacecraft.
Changes in payload requirements: The platform had to be able to interface with multiple payloads mechanically, electrically, thermally, etc. The platform had to be designed to route harnessing to various locations in order to provide power and data connections. In addition, the platform had to have enough switches to account for all the payloads.
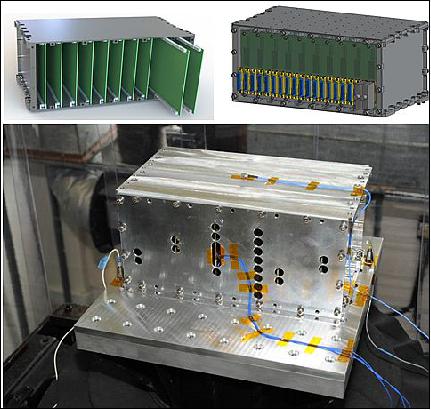
This was accommodated by the new avionics system. Since the power distribution modules in the X-Series avionics were on individual module cards, it was possible to increase (or decrease) the number of switches easily. In addition, the cardframe structure was grown and split into two separate units and sized to hold the exact number of cards that were needed for the mission (including some spares). The CAN bus provided a distributed data interface and allowed multiple payloads to be connected to it as well.
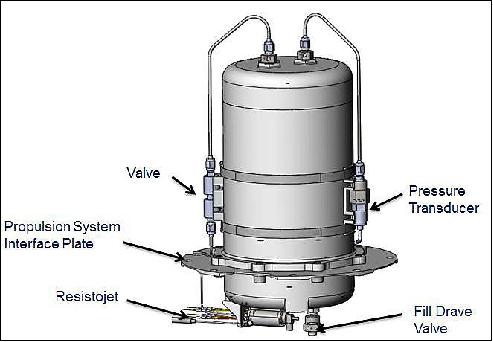
Removal of propulsion system: The original mission design included a butane cold gas propulsion system. The design of the platform allows the propulsion system, which was designed to be a standalone unit, to be integrated at the very end by sliding it through the opening in the bottom of the separation panel. However, the simplification of the demonstration requirements and reducing the operation orbit meant that a propulsion system was no longer required. This had the added bonus of reducing the mass for the ISS launch option and also has simplified the safety review process.
Drag Effects on the Launch Opportunity Selection: In a various range of space applications, the most significant orbital perturbations with respect to the Keplerian dynamics model are those due to the non-sphericity of the Earth’s gravitational potential, and especially to its first zonal coefficient J2. In our case however, we will pay specific attention to the drag effects since, contrarily to the gravitation perturbations, they do not affect the platform and the different CubeSats in the same way. Indeed the relative perturbations must be considered when dealing with formation flying or rendezvous applications, and in Low Earth Orbit the relative drag effects can be critical when the different orbited spacecrafts have dissymmetric features. It has been numerically verified with the Airbus DS in-house Mission Analysis simulation platform OSCAR that, given the demonstration scenario and the orbited objects properties, the impact of the Earth’s oblateness on the relative motion is insignificant as compared to the drag contribution.
Mission Status
• August 2019: The RemoveDebris mission has been the first ADR (Active Debris Removal) mission to give in orbit demonstrations of cost effective technologies that can be used to observe, capture and dispose of space debris. 21)
- The craft was launched to the ISS on the 2nd of April 2018, on board a Dragon capsule. From here the satellite was deployed via the NanoRacks Kaber system into an orbit at 405 km altitude and has performed key technology demonstrations including the use of a net, a harpoon, VBN (Vision-Based Navigation) and a dragsail in a realistic space operational environment.
Event | Date |
Start of RemoveDEBRIS project (Kick off) | October 2013 |
PDR (Preliminary Design Review) | December 2014 |
Platform CDR (Critical Design Review) | March 2017 |
Satellite FRR (Flight Readiness Review) & AR (Acceptance Review) | December 2017 |
Transfer to US | December 2017 |
Launch | 2 April 2018 |
Release from ISS | 20 June 2018 |
End of LEOP & commissioning | August 2018 |
Net Capture Experiment | 16 September 2018 |
Vision Based Navigation Experiment | 28 October 2018 |
Harpoon Experiment | 8 February 2019 |
DragSail Experiment | 4 March 2019 |
End of Life (planned) | 2020-2021 |
In Orbit Demonstrations
1) Net Capture Demonstration
The first demonstration to take place was the Net capture. This demonstration required the release of the CubeSat DSAT#1 (Debris Satellite-1), at low speed (V=5cm/s), and this to inflate its deployable structures in order to become more representative of the size of a large space debris.
On 16 September 2018, DSAT#1 was deployed by the ISIS deployer as planned, and triggered by a timer its deployables were actuated. Measurements of the velocity with which the cubesat drifted away from the mothercarft showed a speed of approximately 7.5m/s; slightly higher than planned but still appropriate for the experiment. Two of the four lateral deployable booms deployed as planned (Figure 19) and so did the longitudinal deployable boom. The latter is visible in the video-footage of the Net capture experiment, as recorded by the two surveillance cameras mounted on the mothercraft to video the experiment.

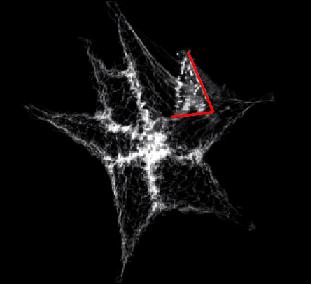
Figure 20 shows the moment of the capture, at the edge of the Net, from where it is possible to see one of the 4 sails of DSAT#1, between one of the lateral booms and the longitudinal boom.
2) VBN (Vision-Based Navigation) Demonstration
The purpose of the VBN demonstration was to assess the state-of-the-art of Image Processing (IP) and navigation algorithms based on actual flight data, acquired through two sensors: a standard high quality camera and a flash imaging LiDAR system.
The device is shown in Figure 21, together with the cubesat DSAT#2 that was released by the mothercraft in order to be observed by the two cameras to then be able to reconstruct the dynamics of the object from the “pictures” acquired via the cameras.
Once released by the ISIPOD#2, DSAT#2 drifted away from the mothercraft at a velocity of 2 cm/s.

One of the challenges is to recognize the target independently from the background (Figure 22), and this experiment provided a wealth of real data to assess the performances and robustness of the VBN algorithms.

Lidar imagery directly delivers information about the target distance, and this data was compared with the measurements obtained by the GPS on board the CubeSat, which were relayed to the mothercraft via an intersatellite link. This data and the GPS information for the mothercraft allowed calculation of the distance between the objects, and use of this as a reference to establish the quality of the LiDAR measurements, which was found to be in line with the expectations.
3) Harpoon Demonstration
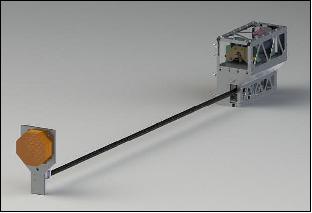
The harpoon demonstration was carried out firing the Harpoon on a target representative of structural panels on old, large satellites, which are potential targets for this technology. The target was deployed at the end of a 1.5m long boom as shown in Figure 24.
As the target was deployed a significant oscillation developed on the structure with the target oscillating around its nominal position as shown in Figure 25.
The oscillations were excited by the inputs produced by on board equipment (AOCS), and minimizing the action of the AOCS it was possible to stabilize the boom in order to be able to carry out the experiment with sufficient reliability.

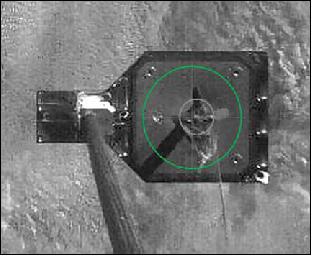
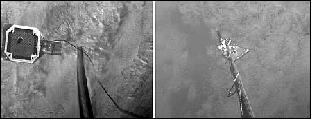
On 8 February 2019, the harpoon was fired at the target. The harpoon travelled at a speed of 19m/s and hit the target in the center as shown in Figure 26. The target was snapped off of the end of the boom (Figure 27), due to the mechanical shock, it was retained by the harpoon which was tethered to the mothercraft.
The floating target eventually wrapped itself around the deployable boom as shown in Figure 27.
4) Dragsail Demonstration
The last experiment to be performed was the dragsail, as in any mission the deployment of this device to deorbit the craft would be the last phase of the in-orbit operations.
This payload that was delivered for integration in the mothercraft is shown in Figure 28 and when operated, the inflatable mast extends 1m out of the enclosure and CFRP booms deploy radially outwards to unfold the sail. Once deployed the dragsail is very similar to that used for the CubeSat InflateSAIL that is shown in Figure 29.
As this payload was mounted on the back of the mothercraft in order not to interfere with the other payloads [Net, VBN and HTA (Harpoon Target Assembly)] it was not possible to video this experiment, as all the supervision cameras were on the other side of the craft, to monitor the other three demonstrations. For the Dragsail, successful demonstration would have been indicated by a significant increase in the decay rate of the mothercraft, by some changes in the outputs pattern of the solar panels (as these at times would be obscured by the sails), and by an increase in the brightness of the satellite from ground observations.


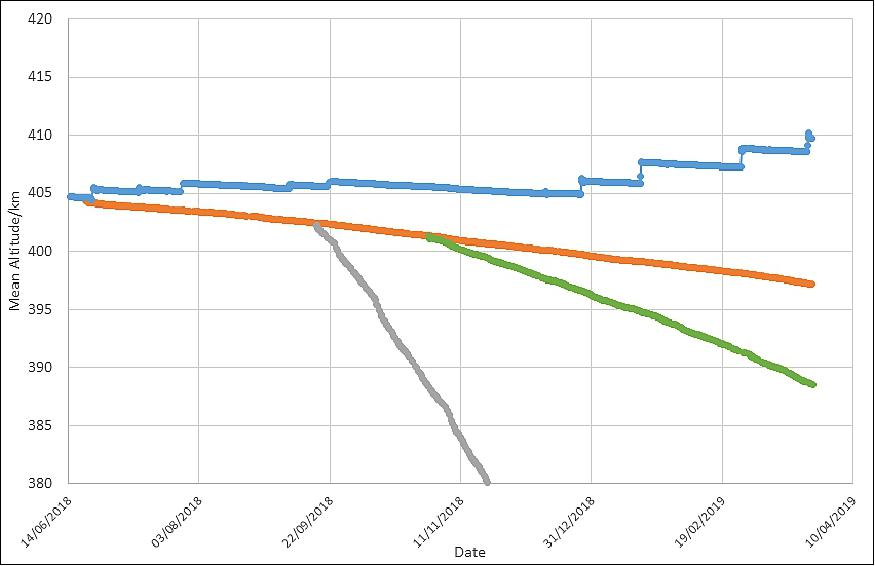
The command to deploy the sail was given on 4 March 2019. From the ground, a small increase in the brightness of the object (the RemoveDEBRIS mothercraft) was detected, however, there was no significant change in the output of the solar panels, and the decay of the altitude of the object has not accelerated as expected (Figure 30). These factors point to a possible partial deployment of the sail.
However based on the lesson learned from the development and MAIT of the RemoveDEBRIS’ dragsail, improvements were made on the dragsail of the CubeSat InflateSAIL and on two further dragsails (Figure 32) that were used for the Spaceflight Industries’ SSO-A mission. All three sails have deployed successfully in orbit with InflateSAIL having already re-entered and therefore the development of the RemoveDEBRIS dragsail had its usefulness as it paved the way for the development of these commercial devices.
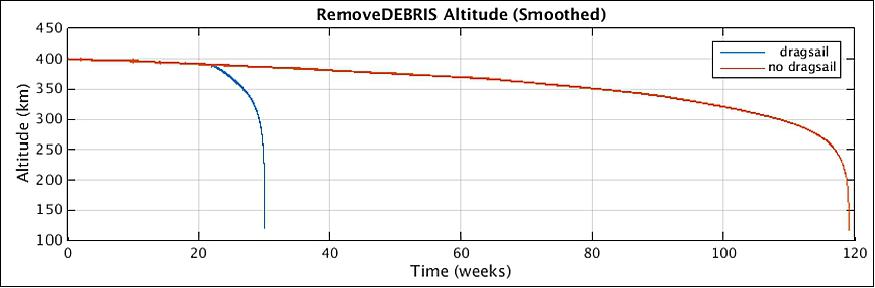
One final comment is that even without the dragsail fully deployed, the two cubesats and the craft are deorbiting as planned. With reference to Figure 30, the first of the CubeSats has already been de-orbited (on 2 March 2019), the second should be de-orbited in the next few months, and the mothercraft during its first year in orbit has already lowered its altitude by more than 10 km, and therefore is due to completely de-orbit, burning in the atmosphere in the next couple of years. Considering that the platform was released in orbit at an altitude slightly higher than planned (405 km, versus the 400 km used for the simulations in Figure 31), the decay of the craft is consistent with what was initially predicted, reported in Figure 31, and indeed well within the current guidelines.

In summary, the demonstrations of the Net and Harpoon target technologies have confirmed that these are indeed viable technologies for the removal of large space debris. The hardware will need scaling up, due to the larger size of potential real targets, but the basic technology is sound and the in orbit demonstrations have provided a valuable experience to de-risk future developments.
The VBN demonstration has also been successful, collecting a great amount of data and proving the performance of hardware and software in the real environment.
The dragsail experiment manifested some anomalies, however, this has paved the way for successful commercial exploitation in the new devices that have been produced by SSC (Surrey Space Centre).
The mission has also been successful in getting a variety of institutions working together to tackle a global issue, from large to small companies, universities and research centers, sharing best practice and improving their competitiveness (Ref. 21).
• September 18, 2018: The RemoveDEBRIS satellite has successfully used its on-board net technology in orbit – the first demonstration in human history of active debris removal (ADR) technology. 22) 23) 24)
- The spacecraft began the experimental phase of its mission on Sunday 16 September, when it used a net to capture a deployed target simulating a piece of space debris.
- RemoveDEBRIS was designed, built and manufactured by a consortium of leading space companies and research institutions led by the Surrey Space Centre at the University of Surrey. The spacecraft is operated in orbit by engineers at SSTL ( Surrey Satellite Technology Ltd) in Guildford, UK. The project is co-funded by the European Commission.
- Professor Guglielmo Aglietti, Director of the Surrey Space Centre, said: “We are absolutely delighted with the outcome of the net technology. While it might sound like a simple idea, the complexity of using a net in space to capture a piece of debris took many years of planning, engineering and coordination between the Surrey Space Centre, Airbus and our partners – but there is more work to be done. These are very exciting times for us all.”
- Ingo Retat, Airbus RemoveDEBRIS project head, said: “To develop this net technology to capture space debris we spent 6 years testing in parabolic flights, in special drop towers and also thermal vacuum chambers. Our small team of engineers and technicians have done an amazing job moving us one step closer to clearing up low Earth orbit.”
- In the coming months, RemoveDEBRIS will test more ADR technologies: a vision-based navigation system that uses cameras and LiDaR technology to analyse and observe potential pieces of debris; the first harpoon capture technology used in orbit; and a drag-sail that will finally bring RemoveDEBRIS into the Earth’s atmosphere where it will be destroyed, bringing its mission to a close.
- The US Space Surveillance Network tracks 40,000 objects and it is estimated that there are more than 7,600 tons of ‘space junk’ in and around Earth’s orbit - with some moving faster than a speeding bullet, approaching speeds of 30,000 miles per hour.
- The research leading to these results has received funding from the European Union Seventh Framework Programme [FP7/2007-2013] under grant agreement No 607099.
• August 23, 2018: SSTL has confirmed the successful commissioning in-orbit of the RemoveDEBRIS spacecraft, which was deployed from the International Space Station on 20 June 2018. Spacecraft operators at SSTL have just completed a series of tests and operations to confirm the functionality of key operating systems such as power management, communications, propulsion, attitude control and on-board computing, and the satellite is now ready for the experimental phase of the mission to begin. 25) 26)
- The RemoveDEBRIS satellite was designed, built and manufactured by a consortium of leading space companies and research institutions, led by the Surrey Space Center at the University of Surrey and co-funded by the EC (European Commission).
- The RemoveDEBRIS mission will perform four innovative Active Debris Removal (ADR) experiments, beginning in October with the deployment of a net developed by Airbus in Bremen which has been designed to capture a target CubeSat. The mission is then scheduled to test a vision-based navigation system from Airbus in Toulouse and CSEM (Swiss Centre for Electronics and Microsystems) in Switzerland that uses 2D and 3D LiDaR (light detection and ranging) technology to track a CubeSat released from the main spacecraft. Early in 2019 a harpoon developed by Airbus in Stevenage will be fired at 20 m/s to penetrate a target made of composite material. Finally, the RemoveDEBRIS craft will deploy a large dragsail to speed de-orbit into the Earth’s atmosphere.
• On June 20, 2018, NanoRacks successfully deployed the RemoveDebris satellite from the ISS via the Company’s commercially developed Kaber (Kaber Microsatellite Deployer). This is the third major microsatellite deployment for NanoRacks, and the largest satellite to ever be deployed from the International Space Station. 27) 28) 29) 30)

- RemoveDEBRIS, one of the world’s first attempts to address the build-up of dangerous space debris orbiting Earth, was launched to the Space Station via NanoRacks on the 14th SpaceX Commercial Resupply Mission in early April.

- The RemoveDEBRIS mission will perform four innovative ADR experiments, beginning in October with the deployment of a net developed by Airbus in Bremen which has been designed to capture a target CubeSat. The mission is then scheduled to test a vision-based navigation system from Airbus in Toulouse and CSEM in Switzerland that uses 2D and 3D LiDaR (light detection and ranging) technology to track a CubeSat released from the main spacecraft. Early in 2019 a harpoon developed by Airbus in Stevenage will be fired at 20 m/s to penetrate a target made of composite material. Finally, the RemoveDEBRIS craft will deploy a large dragsail to speed de-orbit into the Earth’s atmosphere.
- Professor Guglielmo Aglietti, Director of the Surrey Space Centre at the University of Surrey and Principal Investigator for the mission, said: “After almost 5 years of development, it is exciting to finally be in a position where we can test these extremely exciting technologies in the field. If successful, the technologies found in RemoveDEBRIS could be included in other missions in the very near future.” 31)
- Sir Martin Sweeting, Chief Executive of Surrey Satellite Technology Ltd commented: “SSTL’s expertise in designing and building low cost, small satellite missions has been fundamental to the success of RemoveDEBRIS, a landmark technology demonstrator for Active Debris Removal missions that will begin a new era of space junk clearance in Earth’s orbit.”
- The RemoveDEBRIS mission will perform four experiments, which will be tested on two CubeSats to-be-deployed from the larger microsatellite, acting as artificial targets. These experiments include both the first harpoon capture in orbit and a net that will be used on a deployed target. The team will also test a vision-based navigation system that uses cameras and LiDaR technology to observe CubeSats that will be released from the main spacecraft. Finally, the RemoveDEBRIS craft will deploy a large drag sail that will cause the orbit of the spacecraft to rapidly decay until it destroys in the Earth’s atmosphere.
The RemoveDEBRIS consortium consists of:
- Mission and Consortium coordination – Surrey Space Centre (UK)
- Satellite system engineering – ASF (France)
- Platform and Avionics – SSTL (UK)
- Harpoon – Airbus (UK)
- Net – Airbus (Germany)
- Vision Based Navigation – CSEM (Switzerland)/ INRIA/ Airbus (Toulouse)
- CubeSat dispensers – Innovative solutions in space (Holland)
- CubeSat dispensers – Innovative solutions in space (Holland)
- Dragsail – Surrey Space Centre (UK)
• On April 4, 2018, the SpaceX Dragon cargo spacecraft was installed on the Harmony module (Node 2) of the International Space Station at 9:00 a.m. EDT (14:00 GMT). 32)
• On April 4, 2018, the SpaceX Dragon CRS-14 arrived at the International Space Station to deliver more than 2630 kg of research investigations, cargo and supplies, including NASA's Materials International Space Station Experiment (MISSE). This is the ninth MISSE mission in the program's long history of testing material samples in space. 34)

• April 4, 2018: The SpaceX Dragon capsule has arrived at the International Space Station (ISS) after a two-day orbital chase. Astronauts aboard the ISS snagged the uncrewed Dragon at 10:40 GMT using the orbiting lab's huge Canadarm2 robotic arm. The cargo vehicle had launched Monday afternoon (April 2) aboard a SpaceX Falcon 9 rocket, on a contracted mission for NASA. 35)

- ISS crewmembers will soon start unloading the 2,630 kg of cargo Dragon, which includes a number of scientific experiments. Among them is a study designed to help optimize plant growth in space, and an investigation into how bone marrow produces red blood cells in a microgravity environment.
- Also aboard Dragon is an experimental spacecraft called RemoveDebris, which will be deployed from the ISS in the near future to test ways to clean up space junk. Once it's flying freely, the RemoveDebris mothership will practice hitting an onboard target with a harpoon, and it will also jettison a small piggyback satellite and then try to bag it up with a net.
- The Dragon will remain at the ISS until next month, when crewmembers will load it up with about 1,800 kg of cargo from the station, SpaceX representatives have said. The capsule will depart and maneuver its way to a splashdown in the Pacific Ocean off Baja California, where SpaceX personnel will retrieve it by boat.
DebrisSats (DSAT)
RemoveDebris is aimed at performing key ADR (Active Debris Removal) demonstrations (e.g. net, harpoon, visual based navigation (VBN), and deorbit sail) representative of an operational mission in order to advance the TRL (Technology Readiness Level) of key ADR technologies. The project is aimed at contributing to global/European ADR roadmaps. A microsatellite, called RemoveSat, will release and capture several space debris targets, called DebrisSats, in sequence using various technologies thus demonstrating in orbit, key ADR technologies for future missions in what promises to be the first ADR technology mission internationally.
This mission provides unique cost and schedule challenges along with requirements that dictate the need for having a platform and avionics suite that can be modified late into the development program. In addition, the mission requires a platform that is able to host and service multiple payloads with varying requirements. Lastly, the launch options also require the need to have a platform design that can cope with contradicting needs.
Net CubeSat, DSAT-1
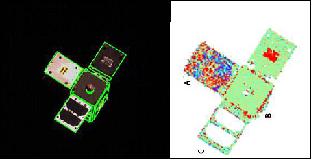
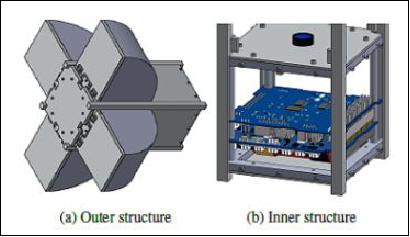
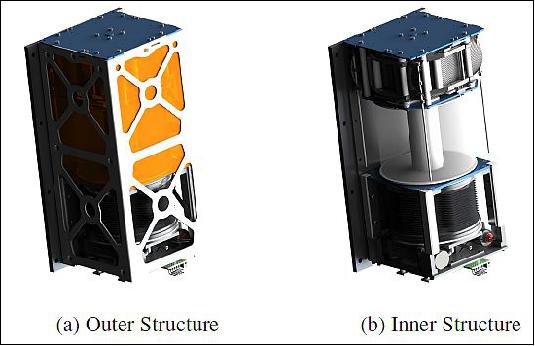
DSAT-1 is based on a 2U CubeSat with the following dimensions: 100 x 100 x 227 mm, where 1U (100 x 100 x 100 mm) is reserved for the avionics and the remaining space is reserved for the inflatable structure. Figure 39 shows the CubeSat structure. Figure 39 (a) shows the outer structure when the CubeSat is undeployed. The avionics section features an interfacing port with the deployer, a camera that can be used to take imagery of the main platform as the CubeSat is ejected, and the burn wire that holds the inflatable system in place. Figure 39 (b) shows the inside of the CubeSat where the avionics boards are both clearly visible along with the central inflation connector system. The central connector is designed to house the inflation system, a CGG (Cold Gas Generator), and a solenoid valve. The role of this valve is to allow trapped air escape during the launch phase. Prior to the deployment of the structure this valve must be closed, to form a leak free system. The central housing may be constructed from sections of aluminum, which are sealed using a set of o-rings.
Figure 39 (c) shows the first deployment stage, where the burn wire is burnt and the inflation system is released downwards by means of two high torsion springs. Once the CGG is activated, the booms simultaneously inflate forming the overall balloon structure. This is shown in Figure 39 (d) where the wires and balloon sheeting is not shown.
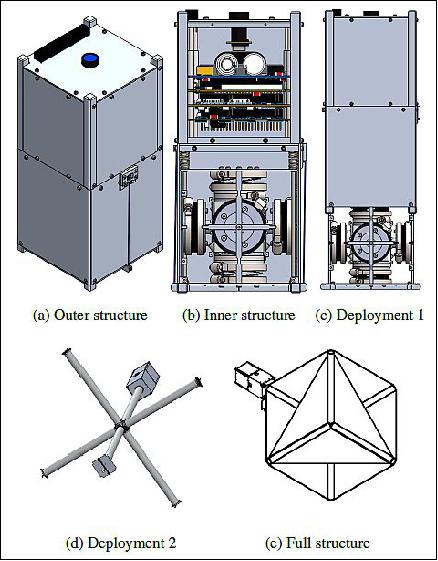
Figure 39 (e) shows the fully inflated balloon including wires and membrane which resembles an octahedron tensegrity. To establish the shape of the inflatable structure, several geometries were investigated. The well proven spherical envelope was selected as a benchmark against which other geometries were evaluated. The final design has a minimal gas volume allowing smaller CGGs to be used and the sheeting membranes are attached axially, rather than being bounded by the inflatable members. This design choice reduced the sail material surface area by 25%, but the projected area remained the same.
Harpoon CubeSat, DSAT-2
The harpoon CubeSat, DSAT-2, can be seen in Figure 40. The CubeSat is again a 2U, like DSAT-1 where 1U is used for avionics and 1U is used as a harpoon capture box. As can be seen in Figure 40 (a), the CubeSat deploys four panels in the shape of a cross, increasing the likelihood the harpoon will hit. The CubeSat has a momentum wheel that is activated just before leaving the platform, enabling any unwanted tumbling motion to be converted into a gyroscopic motion. The CubeSat features a series of debris-capture materials on each panel (a bag or net) that is designed to capture any debris produced by the harpoon. The harpoon is designed in such a way to contain debris from the impact face and also has an end-stop to prevent it from passing through the impact surface; the bags collect any potential debris from the rear of the impact panel.
Figure40 (b) shows the internal avionics in the CubeSat (discussed later). An internally mounted camera observes the impact panels and is able to photograph the impact. A series of LEDs light up the impact space providing light for the camera.
VBN (Vision Based Navigation) CubeSat
In the VBN scenario, the VBN payload on the platform will inspect the VBN CubeSat, DSAT-3, during a series of maneuvers at a range of distances and in different light conditions dependent on the orbit. DSAT-3 will take the same structure as DSAT-2. The panels will deploy in the same cross shape, removing CubeSat symmetry and enabling the VBN payload to better identify the CubeSat attitude. DSAT-3 has similar avionics to DSAT-2, except it contains a full AOCS system allowing full 3 degree of freedom (3-DOF) control.
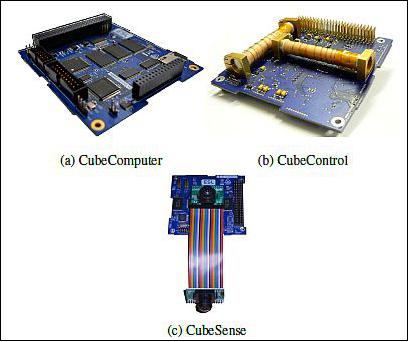
Avionics: The CubeSat avionics are primarily based on the QB50 avionics developed by the SSC (Surrey Space Centre) and the ESL (Electronic Systems Laboratory) at Stellenbosch University. The QB50 stack, shown in Figure 41 consists of 3 boards, the CubeComputer, CubeControl and CubeSense boards which in conjunction provide 3-DOF attitude control to a CubeSat.
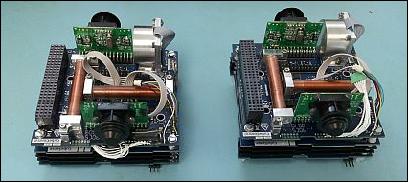
The primary boards are shown in Figure 42. The CubeComputer performs the CubeSat processing and contains a 32 bit ARM Cortex-M3 including flash for in-flight reprogramming (dual redundant), an FPGA for flow-through error correction in case of a radiation upset on the memory and a MicroSD card for data storage. The CubeControl controls both magnetometers and samples connected sensors. The CubeSense contains both sun and nadir sensors.
Not all of the boards are used on each CubeSat; the boards used in each CubeSat are given in Table 6. Note each CubeSat also requires a power board (DSAT-1 and DSAT-2 have only a single battery, while DSAT-3 has solar panels as well). Each CubeSat also has an ISL (Inter-Satellite Link ) that is used to communicate with the platform. In the case of DSAT-1 this is used for the platform to command balloon inflation and to receive imagery back from the camera. For DSAT-2 and DSAT-3, as well as imagery data, the ISL is also used to transmit telemetry and sensor data to the platform and for the platform to command desired CubeSat attitudes. The CubeSats do not have a communication link directly with Earth that consumes a lot of power, instead all CubeSat to ground communication is via the platform. DSAT-1 also has an additional board for control of the air valve and the CGG system.
CubeSat | Board |
DSAT-1 (Net) | CubeComputer OBC (OnBoard Computer) board |
DSAT-2 (Harpoon) | CubeComputer OBC(OnBoard Computer)) + MW (Momentum Wheel) board |
DSAT-3 (VBN) | CubeComputer (OBC) + GPS board |
CubeSat Deployer
The 3 target CubeSats for the RemoveDebris project are carried onboard the host satellite inside 3 dedicated CubeSat dispensers provided by ISIS (Innovative Solutions In Space). For this particular mission ISIS is redesigning its heritage ISIPOD CubeSat dispenser system to meet the specific mission objectives for the project. Normally the CubeSat dispensers deploy the CubeSats into orbit from an upper stage of a rocket and are activated within the first hour of the launch. For RemoveDebris, the CubeSats will be deployed from a host satellite, which causes specific integration and accommodation challenges and in addition the CubeSats will be deployed long after launch. This has some key implications for the dispenser system. The dispenser now needs to withstand up to several months in orbit before the host satellite will activate the dispensers to eject the target CubeSats.
Moreover, the target CubeSat inside the dispensers will also need to be stowed inside the host satellites a long time. The dispensers will be outfitted with a special interface so the host satellite can charge the batteries of the target CubeSats and can perform in-space checkout routines by offering an interface to the target CubeSat computer. Finally, a major modification specific for the RemoveDebris dispenser compared to the normal dispensers is the deployment velocity for the Target CubeSats. Nominally the CubeSats are ejected with a deployment velocity of 1 to 2 m/s in order to ensure that the CubeSats separates sufficiently fast from the launch vehicle upper stage.
However, given the mission of RemoveDebris, there are requirements to keep the target satellites close to the host spacecraft so there is a minimum risk of losing sight of the Targets. Therefore, the CubeSat dispensers are modified and complemented with an additional low speed deployment functionality that will allow a very low deployment velocity as low as 5 cm/s for the deployment of the target CubeSats. Ideally, these speeds are 2 cm/s for the harpoon demonstration and 5 cm/s for the net demonstration.
Sensor Complement
Net Demonstration
A CubeSat will be released from the main RemoveSat platform. As the simulated debris CubeSat drifts away and reaches a specified distance from the main platform, a net will be released to capture it. Once the net is ejected, it will expand in size and throw weights at the edges of the net will wind the net closed after it has captured the target. This sequence of events will be recorded by the on board cameras from the main platform and be downlinked to the ground.
The NETCAM (Net Capture Mechanism) will be accommodated on top of the spacecraft bus and is provided by Airbus DS, Bremen. After activation command from the OBC, a net will be deployed to capture a nanosatellite released from the spacecraft approximately 100 s before. After entanglement of the net around the target, the net will be closed by motor driven winches, integrated to the net deployment masses. 36)
Net Hardware: The NETCAM design is shown in Figure 43. The NETCAM has 275 mm diameter and a height of 220 mm. The total mass target is 6:5 kg. Usually, the net will be connected with the spacecraft via a tether to pull the target and eventually initiate the controlled deorbiting. However, for RemoveDebris the tether will not be fixed on the spacecraft side to avoid two body dynamic impacts due to the low thrust propulsion system of the platform.

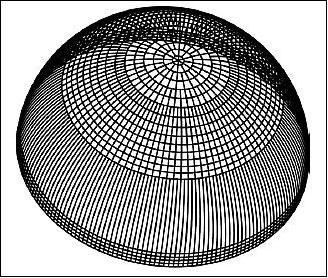
A hemispherical spider type net shall be used for the RemoveDebris project (Figure 44). The net shall have 5 m diameter. Kevlar has been chosen as material. The total mass of the net shall be approximately 0.6 kg. A mesh size of 80 mm was selected, because this may prevent the target from escaping even if the inflation/enlargement fails. It has been realized that not all 196 meridian lines can really run from the circumference to the pol (i.e. the lid of the NETCAM), because this would yield a huge bundle of lines at the pol. For the NETCAM, only 6 lines will directly connect the deployment masses with the lid. All other meridian lines will end at intermediate latitude lines.
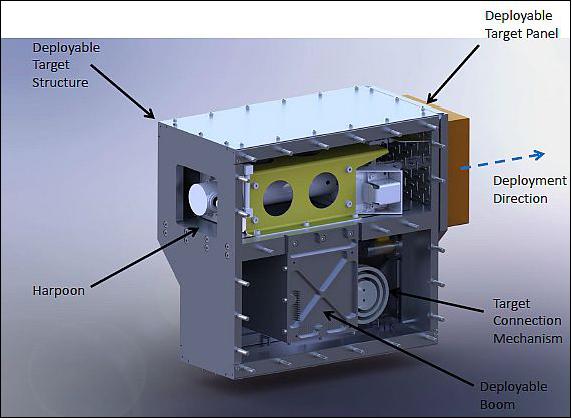
HTA (Harpoon Target Assembly) and HCS (Harpoon Capture System)
The HTA consists of the deployable target structure and the HCS. The former is being provided by SSC, the latter is being developed by Airbus DS Stevenage (UK) as a mission enabling capture system for future ADR missions. The RemoveDebris mission serves to raise the TRL of key elements of the harpoon capture system, providing a platform to test the technology in the space environment. The HCS is designed to establish a hard point attachment to debris and provide a link to the chaser via a flexible coupling. A flexible link allows for deployment from a stand-off distance, reducing the risk to the chaser during stabilization or towing. The HCS has several features which led to its selection:
• Low mass and volume allowing the possibility to host multiple harpoons on a single spacecraft
• Relative simplicity leading to high reliability, low development risk and low cost
• High firing speed ensuring compatibility with objects spinning at fast rates
• Ability to perform comprehensive characterization of capture on ground.
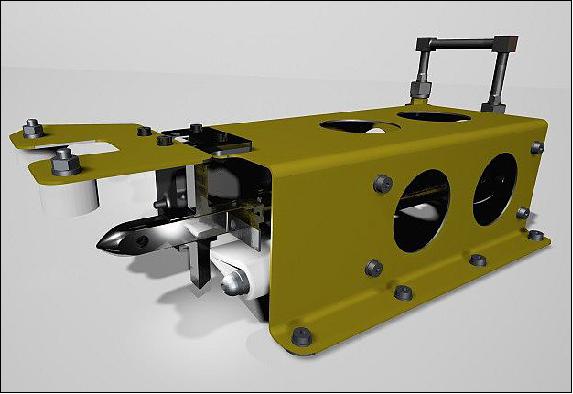
The HTA structure is shown in Figure 45 where the harpoon is mounted at the top and the deployable boom at the bottom. As the deployable boom (a coiled CPFR mono-stable boom) extends, the target panel moves out from the structure and platform. At 1:5 m the boom stops extended and the harpoon firing experiment is performed. The experiment is captured on the dual supervision cameras on the platform. After the experiment, the boom is retracted to prevent interference with the dragsail for when the dragsail boom is deployed later in the mission.
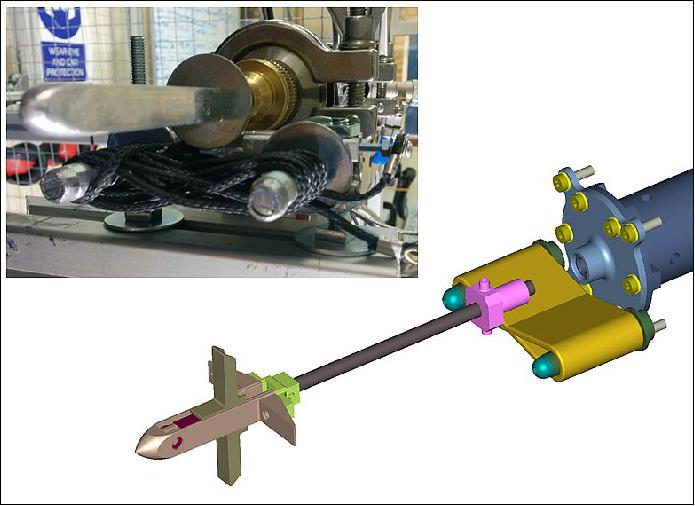
Harpoon hardware: The baseline harpoon concept for large debris items was developed under internal Airbus R&D and a small scale demonstrator has been accepted for flight test on RemoveDebris. The HCS designed for RemoveDebris is composed of 3 main elements; Deployer, Projectile and Tether. The flight harpoon payload is shown in Figure 46. 37)
The Deployer imparts sufficient velocity to the projectile for penetration of the target structure. Extensive ground characterization has established that 20m/s is required to penetrate the targets aluminum honeycomb panels. Energy is provided to the system by a gas generator mounted at the back of the Deployer. Upon activating gas is released into the chamber volume, increasing the force applied against a piston. The piston is held by a tear pin until a set failure stress is reached, resulting in the piston propelling the projectile out of the Deployer. To provide fault tolerance against premature deployment, a HDR (Hold Down and Release) mechanism is to be incorporated on the flight model.
The projectile is shown in Figure 47. The projectile is designed to penetrate the target panel and successfully deploy a set of barbs on the opposite side, providing the crucial locking interface with the target. A shroud protects the barbs during the penetration of the structure and allows the harpoon to capture targets with misalignments of up to 45º. Free release of the tether is a key influence on the accuracy of the HCS. Tests have been performed to select the ideal spool arrangement and mounting location to minimize an inaccuracy in impact location.
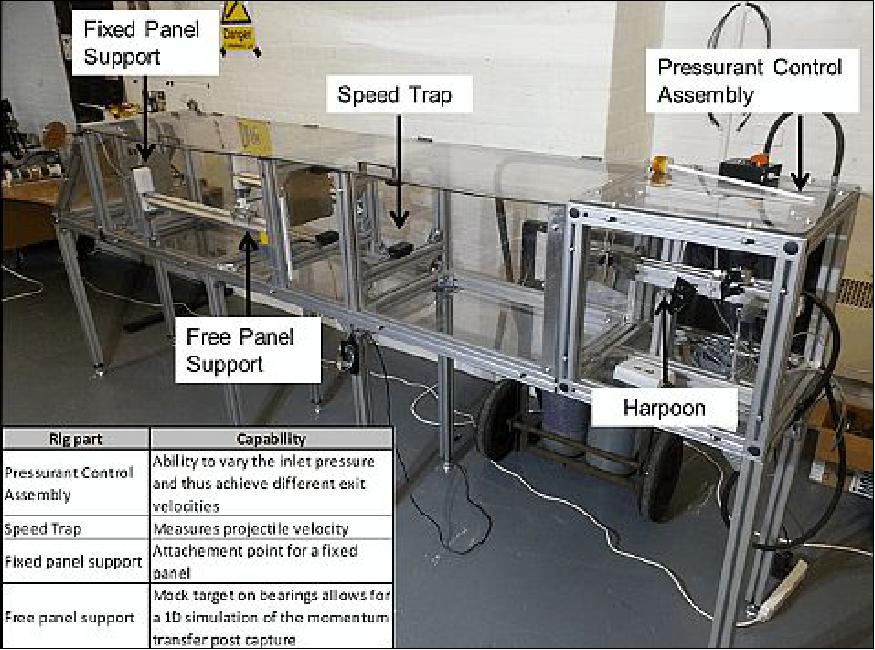
Harpoon and HTA testing: A significant benefit of the harpoon is that validation of many aspects can be performed on ground in the Airbus DS test range shown in Figure 48. The availability of a test range allows for many of the design challenges to be overcome and characterized on ground before use on-orbit. The test rig has allowed many design variables to be tested; projectile configuration, panel type, panel offset, chaser momentum. The availability of the test rig allows the rapid prototype development and identification of key design variables that are difficult to identify using classical design approaches.
The opportunity for the RemoveDebris in-flight demonstration of the HCS is the next step the development of the technology for adoption on a future ADR mission. The mission will demonstrate the HCS functionality in the LEO environment. RemoveDebris will advance the HCS beyond the Airbus DS concept and breadboards and inform the development of an integrated system design that can be considered for future ADR missions.
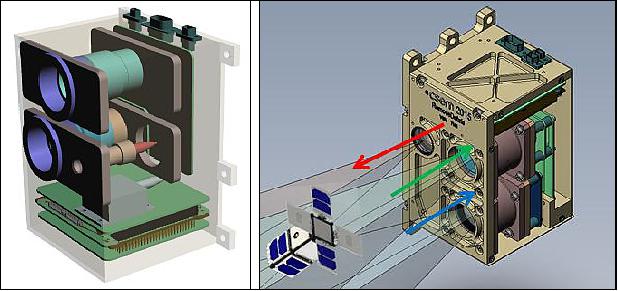
VBN (Vision Based Navigation)
Airbus DS Toulouse has been strongly involved in the design VBN systems over the last years, with particular focus on applications such as planetary landing and orbital rendezvous, typically in the context of MSR (Mars Sample Return) missions. Based on this background and due to the increasing interest in ADR, solutions for autonomous, vision-based navigation for non-cooperative rendezvous have been investigated. Dedicated image processing (IP) and navigation algorithms have been designed at Airbus DS and INRIA to meet this specific case, and some of them have already been tested over synthetic images and actual pictures of various spacecraft. As the next step, the VBN demonstration onboard RemoveDebris will validate VBN equipment and algorithms, through ground-based processing of actual images acquired in flight, in conditions fully representative of ADR. The VBN demonstration will thus fulfil the following objectives:
• Demonstrate state-of-the-art image processing and navigation algorithms based on actual flight data, acquired through two different but complementary sensors: a standard camera, and a flash imaging LiDAR.
• Validate a flash imaging LiDAR in flight, raising its TRL to level 7.
• Provide an on-board processing function in order to support navigation.
VBN hardware: Images will be captured from two main optical sensors: a conventional 2D camera (passive imager) and an innovative flash imaging LiDAR (active imager), developed by CSEM (Swiss Centre for Electronics and Microsystems). It will be a scaled-down version of a 3D imaging device currently developed and tested in the frame of ‘Fosternav’ FP7 project for the EC (European Commission) focusing on landing and rendezvous applications. This architecture has the particularity of providing ranging capability by measuring the phase difference of two signals. It will be the first time in Europe that a device based on flash imaging LiDAR technology - considered to be a key enabling technology by the space community for the future success of exploration missions with landing, rendezvous and rover navigation phases -will be used for debris tracking and capture control. Such an experiment will allow Europe to master state of the art technologies in the field of 3D vision sensors for GNC systems. The hardware is shown in Figure 49.
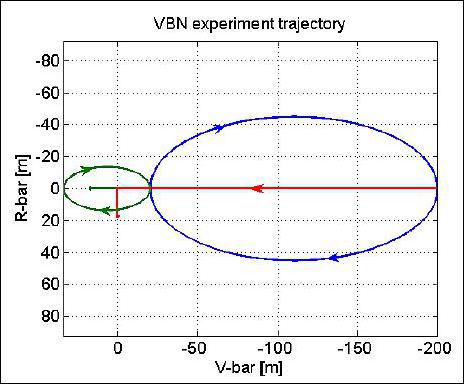
Demonstration trajectory: In a first step, 3D and 2D images will be captured from the start of the operational phase, i.e. when DSAT-1 is released for preliminary checks, monitoring purposes, as well as a first collection of data covering the net experiment. In a second step, the VBN demonstration per se will start, and will consist in capturing images of DSAT-3 from various distances and over large duration in order to make sure that the widest range of visual configurations (in terms of distance to target, relative attitude, light conditions, background) is reached. This will make the experiment as much demonstrative as possible, while meeting the classical duration and cost constraints of a low-cost demonstration mission.
Starting from DSAT-3 ejection, several types of rendezvous maneuvers are possible, and a reference scenario made up of hops trajectories based on radial (R-bar) or velocity (V-bar) burns is being defined. These maneuvers are all standard and representative of future debris removal proximity operations, such as final rendezvous, inspection and capture. A possible trajectory combining these different maneuvers so as to maximize the range of visual configurations between RemoveSat and DSAT-3 while minimizing propellant consumption, is illustrated in Figure 50.
After DSAT-3 deploys a dragsail that will hasten its orbital decay, the 3D and 2D cameras will continue to collect imagery as long as LOS (Line-Of-Sight) is maintained. Image data will be downloaded during ground contact windows.
On-ground processing: All the data acquired during the VBN experiment will be processed on the ground with innovative IP algorithms (e.g. 2D/3D and 3D/3D matching techniques) and specifically tuned navigation algorithms based on an EKF (Extended Kalman Filter) able to fuse data from different sensors (e.g. camera images and attitude sensing data).
Differential GPS and onboard attitude estimation software will also provide ‘ground truth’ data against which the navigation algorithms will be compared for validation and performance assessment. Post-processing activities will allow demonstration of performances of innovative 2D camera based navigation and 3D camera based navigation, allowing not only estimation of relative position and velocity but also relative attitude, one of the key drivers of successful capture of an uncooperative target.
Supervision Cameras
The RemoveSat platform will house two supervision cameras: one dedicated to the net demonstration with a 65º x 54 º FOV (Field of View) and one dedicated to the harpoon demonstration with a 17º x 14º FOV.
The supervision cameras are based on SSTL’s heritage system, shown in Figure 51, flown on the TDS-1 (Technology Demonstration Satellite-1) launched in July, 2014. This camera system uses COTS technology combining a color CMOS camera with a high performance machine vision lens capable of delivering video. Both camera and lens are stripped down and all unsuitable components removed before being ruggedized during reassembly to survive the vibration and shock loads experienced during launch as well as making it suitable for the space environment. The camera system will be optimized to give a depth of field capable of meeting the performance requirements for the two demonstrations. Customized mounting brackets will be used to point the camera in the required direction for the demonstrations. The cameras will use a CameraLink interface to the PIU. They will acquire 8 bit images that are 1280 x 1024 pixels in size at 10 frames/s. Figure 20 shows an image taken of the APM (Antenna Pointing Mechanism) on TDS-1 just after launch with Earth in the background.

Dragsail
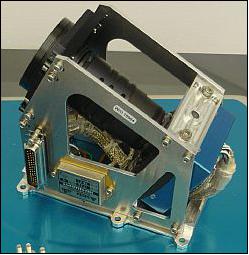
The RemoveDebris platform will have a SSC (Surrey Space Centre) dragsail payload. The dragsail concept can be seen in Figure 53. The dragsail consists of 2 parts: a deployer which extends the sail away from the platform (preventing the sail from hitting any overhanging platform hardware e.g. antennas), and a extension mechanism which uses a motor to unfurl carbon fiber booms that hold the sail membrane. Figure 54 shows both of these mechanisms. The deployer is a mechanical two stage ejector that uses a series of springs to eject the system. The extension mechanism consists of four booms rolled into a central distributor that allows controlled unfurling of the sail.
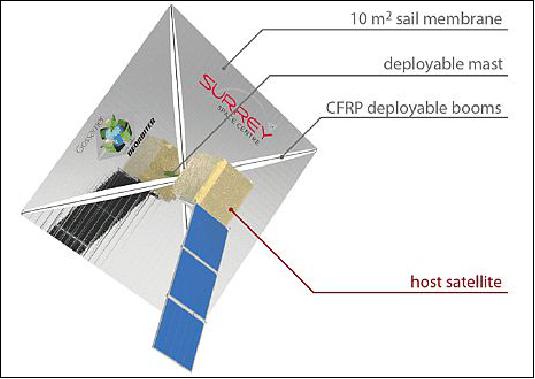
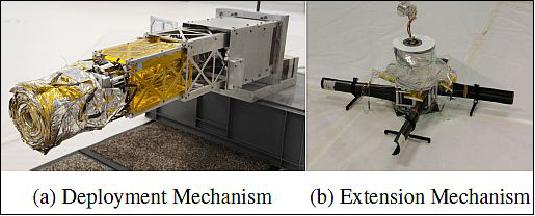
Figure 55 shows an external and internal view of the dragsail. The deployer is an inflatable mechanism that deploys to a length of 1 m and self-hardens. The extension mechanism consists of four booms rolled into a central distributor that allows controlled unfurling of the sail.
ADR Regulatory Issues
The RemoveDebris mission intends to fully comply with all relevant national and international space laws. In particular, it is of prime importance that all space elements released into orbit deorbit within 25 years as demonstrated in the deorbit analysis section. The net and harpoon are also being designed to be trackable from space for the very worst case they miss their targets. Both of these guarantee even if these items miss they will deorbit within 25 years and can be fully tracked during this period. It is also important to not contribute to the production of further debris in space.
For example special provisions have been placed on the addition of debris containment bags around DSAT-2, which help ensure that when the harpoon hits the CubeSat target any debris which might be produced does not escape, even if extensive ground tests show that debris is not created from the kinetic impact of the harpoon. Finally, CubeSats are used here as artificial debris targets; this avoids any legal issues with targeting, capturing or deorbiting debris that is legally owned by other entities.
The RemoveDebris consortium aims to work with the EU, UKSA (UK Space Agency), ESA, CNES and other agencies /entities to provide the latest project achievements, incorporate their feedback, communicate and interface with them on all necessary regulatory procedures required for the RemoveDebris mission.
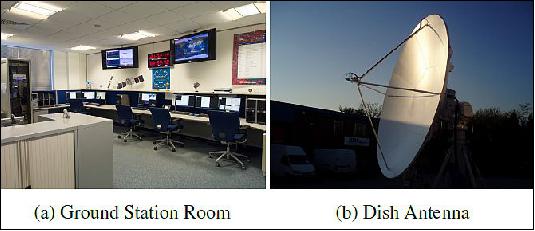
Ground Segment
Operations for the RemoveDebris mission will be carried out from SSTL’s MOC (Mission Operations Centre) in Guildford as shown in Figure56. SSTL’s standard operations procedures will be used, which are of course compatible with the SSTL designed platform operational requirements and characteristics.
References
1) Chris Saunders, “RemoveDebris Mission: Briefing to UNCOPUOS,” 52nd session of the Scientific and Technical Subcommittee, UNOOSA (United Nations Office for Outer Affairs), Vienna, Austria, Feb. 2-13, 2015, URL: http://www.unoosa.org/pdf/pres/stsc2015/tech-42E.pdf
2) Jason L. Forshaw, Guglielmo S. Aglietti, Thierry Salmon, Ingo Retat, Christopher Burgess, Thomas Chabot, Aurelien Pisseloup, Andy Phipps, Cesar Bernal, Francois Chaumette , Alexandre Pollini, Willem H. Steyn, ”The Remove Debris ADR Mission: Preparing for an international space station launch,” Proceedings of the 7th European Conference on Space Debris, ESA/ESOC, Darmstadt/Germany, 18 - 21 April 2017, published by the ESA Space Debris Office, SDC7- paper 173
3) Vaios J. Lappas, Jason L. Forshaw, Lourens Visagie, Aurelien Pisseloup , Thierry Salmon , Eric Joffre , Thomas Chabot , Ingo Retat , Robert Axthelm , Simon Barraclough, Andrew Ratcliffe, Andy Bradford, Haval Kadhem, Nimal Navarathinam, Jeroen Rotteveel, Cesar Bernal , Francois Chaumette, Alexandre Pollini, Willem H. Steyn, “RemoveDebris: An EU low cost demonstration mission to test ADR technologies,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-A6.6-10,URL: http://www.irisa.fr/lagadic/pdf/2014_iac_lappas.pdf
4) “A Low Cost Active Debris Removal Demonstration Mission,” CORDIS, Feb. 11, 2015, URL: http://cordis.europa.eu/project/rcn/188838_en.html
5) Alex Oses, Nimal Navarathinam, Haval Kadhem, Rob Staples, Gary Lay, Mukesh Joshi, James Williams, Martin Sweeting, ”X50: Reducing Cost and Schedule while Being Modular and Adaptable for RemoveDEBRIS,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B4.6A.11
6) Jason L. Forshaw, Guglielmo Aglietti, Nimal Navarathinam, Haval Kadhem, Thierry Salmon , Eric Joffre, Thomas Chabot, Ingo Retat , Robert Axthelm , Simon Barraclough , Andrew Ratcliffe, Cesar Bernal, Francois Chaumette, Alexandre Pollini, Willem H. Steyn, ”An In-Orbit Active Debris Removal Mission – RemoveDEBRIS: Pre-launch Update,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A6.6.3
7) E. Joffre, J. Forshaw, T. Secretin, S. Reynaud, T. Salmon, A. Pisseloup, G. Aglietti, ”RemoveDEBRIS - Mission Analysis for a Low Cost Active Debris Removal Demonstration in 2016,” Proceedings of the 25th International Symposium on Space Flight Dynamics, Munich, Germany, Oct. 19-23, 2015, URL: http://issfd.org/2015/files/downloads/papers/054_Joffre.pdf
8) Jason L. Forshaw, Guglielmo S. Aglietti, Thierry Salmon, Ingo Retat, Alexander Hall, Thomas Chabot, Aurelien Pisseloup, Daniel Tye, Cesar Bernal , Francois Chaumette , Alexandre Pollini, Willem H. Steyn, ”The RemoveDebris ADR Mission: Launch from the ISS, Operations and Experimental Timelines,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17,A6,6,4
9) Robin Biesbroek, ”ESA’s e.deorbit mission and its roadmap to Active Debris Removal,” CEAS 2015 paper No. 153, URL: http://aerospace-europe.eu/media/books/CEAS2015_153.pdf
10) R. Biesbroek, A. Wolahan, ”Maturing the technology for esa's e.deorbit mission to remove a large, heavy space debris from low earth orbit,” CNES 4th International Workshop on Space Debris Modelling and Remediation, Paris, France, June 2016.
11) Stephen Clark, ”Japanese cargo ship ends mission after space debris experiment flounders,” Spaceflight Now, Feb. 6, 2017, URL: https://spaceflightnow.com/2017/02/06
/japanese-cargo-ship-ends-mission-after-space-debris-experiment-flounders/
12) M. Richard, L. Kronig, F. Belloni, S. Rossi, V. Gass, C. Paccolat, J. Thiran, S. Araomi, I. Gavrilovich, H. Shea, ”Uncooperative rendezvous and docking for microsats: The case for CleanSpace One,” 6th International Conference on Recent Advances in Space Technologies, RAST 2013, 12-14 June 2013, Istanbul, Turkey, URL: https://infoscience.epfl.ch/record/187720/files
/CleanSpaceOne%20RAST%20paper%20June%202013.pdf
13) ”SSTL ships RemoveDEBRIS mission for ISS launch,” SSTL News and Events, 18 Dec. 2017, URL: http://www.sstl.co.uk/Press/SSTL-ships-RemoveDEBRIS-mission-for-ISS-launch
14) ”Dragon lifts off,” ESA, 3 April 2018, URL: http://m.esa.int/spaceinimages/Images/2018/04/Dragon_lifts_off
15) Stephen Clark, Spaceflight Now, URL: https://spaceflightnow.com/launch-schedule/
16) Stephen Clark, ”SpaceX CRS 14,” Spaceflight Now, 16 Jan. 2018, URL: https://spaceflightnow.com/launch-schedule/
17) ”Double News ... SpaceX to Launch Experiments for ISS National Laboratory and Cleaning Up Space with a Harpoon,” Satnews Daily, 29 March 2018, URL: http://www.satnews.com
/story.php?number=462570887
18) Kirk Woellert, ”Kaber Small Satellite Deployment System,” NanoRacks ISS Workshop, George Washington University, Washington DC, February 17, 2015, URL: http://nanoracks.com
/wp-content/uploads/Kaber-Small-Satellite-Deployment-System-Presentation.pdf
19) https://www.surrey.ac.uk/surrey-space-centre/missions/removedebris
20) ”Space Maid: Robot Harpoon and Net System to Attempt Space Cleanup,” Space Daily, 5 April 2018, URL: http://www.spacedaily.com/reports
/Space_Maid_Robot_Harpoon_and_Net_System_to_Attempt_Space_Cleanup_999.html
21) G. S. Aglietti, B. Taylor, S. Fellowes, S. Ainley, D. Tye, C. Cox, A. Zarkesh, A. Mafficini, N. Vinkoff, K. Bashford, Thierry Salmon, Ingo Retat, Christopher Burgess, Alexander Hall, Thomas Chabot, K. Kanani, Aurelien Pisseloup, Cesar Bernal, Francois Chaumette, Alexandre Pollini, W. H. Steyn, ”Remove Debris Mission: In-orbit Operations,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-XI-06, URL: https://digitalcommons.usu.edu/smallsat/2019/all2019/153/
22) ”Net successfully snares space debris,” email of the University of Surrey received on 18 September 2018
23) ”Net successfully snares space debris,” University of Surrey Press Release, 19 September 2018, URL: https://www.surrey.ac.uk/news/net-successfully-snares-space-debris
24) ”Successful Space Debris Capture in History Achieved by Surrey Space Center and Surrey Satellite Technology,” Satnews Daily, 19 September 2018, URL: http://www.satnews.com
/story.php?number=1360696825&menu=1
25) ”RemoveDEBRIS mission completes in-orbit commissioning,” SSTL Press Release, 23 August 2018, URL: https://www.sstl.co.uk/media-hub/latest-news/2018
/removedebris-mission-completes-in-orbit-commission
26) Ben Taylor, Guglielmo S. Aglietti, Simon Fellowes, Thierry Salmon, Alexander Hall, Thomas Chabot, Aurelien Pisseloup, Sean Ainley, Dan Tye, I. Retat, Cesar Bernal, Francois Chaumette, Alexandre Pollini, Willem Steyn, ”RemoveDebris Preliminary Mission Results,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-A6.5.1, URL: https://iafastro.directory/iac/proceedings/IAC-18
/IAC-18/A6/5/manuscripts/IAC-18,A6,5,1,x42967.pdf
27) ”NanoRacks Deploys Largest Satellite From International Space Station To Date,” NanoRacks, 20 June 2018, URL: http://nanoracks.com/remove-debris-deployed-from-iss/
28) ”RemoveDEBRIS deployed into Low Earth Orbit from the ISS,” SSTL, 20 June 2018, URL: https://www.sstl.co.uk/media-hub/latest-news/2018
/removedebris-deployed-into-low-earth-orbit-from-th
29) ”UPDATE: The University of Surrey's RemoveDEBRIS Mission Begins and Features Airbus Technologies,” Satnews Daily, 20 June 2018, URL: http://www.satnews.com
/story.php?number=1108748201
30) Stephen Clark, ”Space junk clean-up demonstrator deployed from space station,” 26 June 2018, URL: https://spaceflightnow.com/2018/06/26
/space-junk-clean-up-demonstrator-deployed-from-space-station/
31) !RemoveDEBRIS deploys from the International Space Station to begin its mission,” University of Surrey, 20 June 2018, URL: https://www.surrey.ac.uk/news
/removedebris-deploys-international-space-station-begin-its-mission
32) Mark Garcia, ”Dragon Bolted to Station’s Harmony Module,” NASA, 4 April, 2018, URL: https://web.archive.org/web/20190929144827/https://blogs.nasa.gov/spacestation/2018/04/04/dragon-bolted-to-stations-harmony-module/
33) ”Visiting Vehicle Launches, Arrivals and Departures,” NASA, 4 April 2018, URL: https://web.archive.org/web/20230927121425/https://www.nasa.gov/feature/visiting-vehicle-launches-arrivals-and-departures/
34) ”SpaceX Dragon Arrives at Space Station with Material Samples and New Facility for Testing Them,” NASA, 4 April 2018, URL: https://www.nasa.gov/centers/armstrong
/features/SpaceX_Dragon_Brings_Material_Samples_to_ISS.html
35) Mike Wall, ”SpaceX Cargo Capsule Arrives at Space Station with Tons of Supplies,” SpaceX.com, 4 April 2018, URL: https://www.space.com/40193-spacex-dragon-cargo-capsule-arrives-iss.html
36) Robert Axthelm, Barbara Klotz, Ingo Retat, Uwe Schlossstein, Wolfgang Tritsch, Susanne Vahsen, ”Net Capture Mechanism for Debris Removal Demonstration Mission,” Proceedings of the 7th European Conference on Space Debris, ESA/ESOC, Darmstadt/Germany, 18 - 21 April 2017, published by the ESA Space Debris Office, SDC7, paper 78, ADR-3, URL: https://conference.sdo.esoc.esa.int/proceedings/list
37) Alastair Wayman, Andrew Ratcliffe, Simon Barraclough, Joshua Lurie, Ignacio Fernandez-Nunez, Mihai Lupsa, Sarmad Aziz, Kjetil Wormnes, Martin Zwick, Nicholas Taylor, Andy Jardine, James Campbell, ”Design and Testing of a Full Scale Harpoon Capture System,” Proceedings of the 7th European Conference on Space Debris, ESA/ESOC, Darmstadt/Germany, 18 - 21 April 2017, published by the ESA Space Debris Office, SDC7, paper 411, ADR-3, URL: https://conference.sdo.esoc.esa.int/proceedings/list
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Platform Launch Mission Status DebrisSats Payload Ground Segment References Back to Top