SwampSat CubeSat Mission
Non-EO
Mission complete
Education
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Mission complete |
| Launch date | 20 Nov 2013 |
SwampSat CubeSat Mission
SwampSat is a 1U student-developed CubeSat mission of the University of Florida (UFL) in Gainesville, FL, USA. The goal of the project is to advance the TRL (Technology Readiness Level) of CMGs (Control Moment Gyroscopes) appropriate for smallsats, as a means of increasing the capabilities, and hence the utility of CubeSats. The intend is to demonstrate on-orbit precision three axes attitude control using a pyramidal configuration of CMGs. The satellite is designed around the CubeSat form factor and the architecture is subsystem based. 1) 2) 3) 4) 5)
Spacecraft
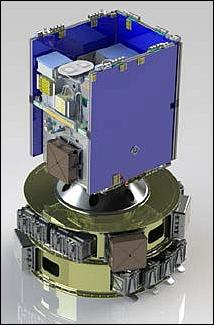
The spacecraft conforms to the CubeSat standard in size 100 mm x 100 mm 110 mm; the mass is 1.2 kg. The design employs COTS (Commercial-off-the-Shelf) components where appropriate. The electrical power and transceiver circuit boards are COTS components. The flight computer is a custom design for the SwampSat mission requirements. The three boards are connected with a 104 pin stack through connector, occupying the top half of the available volume.
ADCS (Attitude Determination and Control Subsystem)
The CMG based ADCS is designed to occupy the bottom half and the electrical power system, transceiver and flight computer occupy the top half of SwampSat. An aluminum frame and the solar panels structurally support SwampSat and isolate the CMG based ADCS and other satellite components from solar radiation. Note: The CMG assembly is also known as IMPACT 1.1.
The ADCS consists of four single gimballed CMGs in a pyramidal configuration as shown Figure 2. The pyramid is designed to fit within 1/2U of a standard CubeSat using custom built hardware. The IMPACT mass is less than 0.5 kg and its estimated maximum torque output is 0.8 mNm. The on board electronics use a quaternion feedback regulator with a generalized singularity robust (GSR) steering logic algorithm, programmed on a 32 bit DSC (Digital Signal Controller) of Texas Instruments (TI).
A start up sequence for powering up the flywheels and (as well as shutting them down) is included in the program, and is required to minimize changes to the angular velocity of the satellite before beginning a maneuver. Absolute encoders are used to determine gimbal position. To minimize friction and prevent outgassing from lubricants, silicon nitride bearings are used in the flywheel housing and gimbal frame. Capton tape is used to protect the flywheel housing from contaminants.
Mass of CMG | 500 g |
Maximum torque output | 0.8 mNm |
Momentum envelope | 0.8 mNms |
Power consumption | 3 W (peak) |
Flywheel speed | 4500 rpm |
Gimbal rates | 1 rad/s (max) |
Volume of instrument | 100 mm x 100 mm x 50 mm |
The ADCS utilizes a magnetometer and sun sensors to obtain vector measurements, and an extended Kalman filter in conjunction with the QUEST algorithm. The sun sensors are based on analog transducers. An optical filter consisting of spectralon and mylar is used to prevent the sensors from saturating. The low resolution of the sun sensors (~5º) combined with the uncertainty in the magnetic and orbital propagation models, as well as Earth albedo effects restricts the ADCS to one of coarse resolution, preventing SwampSat from validating precision pointing. The data obtained from maneuvers will be post processed at mission control to verify rapid retargeting capabilities, while the pointing accuracy will be quantified with respect to the attitude determination system.
The main goal of the SwampSat mission is to validate on-orbit a compact, three-axis attitude actuator, capable of rapid retargeting and precision pointing (R2P2) on board a 1U CubeSat. The following attitude maneuvers are planned:
- slew to point the -Z axis (top face) at the sun
- settle -Z axis at the sun within 2 minutes
- dwell (track) -Z axis on the sun for 10 minutes
- slew 180° to point the face normal to +Z axis at the sun
- slew 180° to point the face normal to -Z axis at the sun
- settle -Z axis at the sun within 2 minutes
- dwell (track) -Z axis on the sun for 10 minutes
- point -Z towards the sun continuously over an orbit (during sunlit time of orbit).
The C&DH (Command & Data Handling) Subsystem
Controlled by the SwampSat Flight Computer (SFC430) which utilizes the msp430 microcontroller of TI. The SFC430 is in-house developed and manages the I2C bus, data storage, telemetry strings, sensors, and the magnetorquer coils. The I2C bus is used to connect the SFC430 with the external A/D converters, real time clock, storage memory, transceiver, electrical power supply board, and the CMG processor. The four types of telemetry strings (real time, ADCS, detumbling, and maneuver data) are managed by the flight computer.
EPS (Electrical Power Subsystem)
EPS consists of a power management board and lithium polymer batteries manufactured by ClydeSpace, and solar cells manufactured by Spectrolab. Solar cells cover five sides of the satellite, producing an estimated on orbit average power of 1.5 W. The solar cells are bonded to custom PCBs (Printed Circuit Boards) which form the sides of five faces of SwampSat.
RF Communications
Use of the UHF/VHF amateur bands (437.385 MHz) in downlink and uplink, respectively. Two half wavelength dipoles couple the transceiver to the channel. The antennas are held in a stowed configuration during launch and deploy into their operational state when commanded by the SFC430. The antennas are mounted to a custom delrin plate which supports the deployment mechanism. The transceiver is configured using the I2C bus and communicated with using a serial connection.
The CubeSat structure consists of a custom base plate and frame rails machined from T-6061 aluminum which supports the CMG pyramid and provides compatibility with the CubeSat specifications for frame rails and the P-POD (Poly-Picosatellite Orbital Deployer). The structure is augmented with custom delrin antenna plates to provide structural support to the aluminum chassis, in conjunction with the PCB side panels.
Spacecraft mass, power | 1.22 kg, ~1.5 W on-orbit average power |
Size | Standard 1U CubeSat of 10 cm x 10 cm x 10 cm |
ADS (Attitude Determination Subsystem) | 6 sun sensors |
ACS (Attitude Control Subsystem) | CMG assembly (referred to as IMPACT 1.1) |
EPS (Electrical Power Subsystem) | ~ 2 W solar cells on each PCB panel |
C&DH (Command & Data Handling) | MSP430 based flight computer |
TT&C (Telemetry Tracking & Command) | 437.385 MHz, AX.25 protocol, AFSK modulation, data rate = 9600 baud |
Ground support | GNES (Gator Nation Earth Station), distributed telemetry collection |
Launch
On Nov. 20, 2013, the SwampSat CubeSat was launched as a secondary payload on the ORS-3 (Operationally Responsive Space-3) mission, a joint initiative of several agencies within DoD (Department of Defense). The ORS Office at Kirtland AFB is the manager of the ORS program. The launch site was MARS (Mid-Atlantic Regional Spaceport), located at NASA's Wallops Flight Facility,Wallops Island, VA. The launch vehicle was a Minotaur-1 of OSC (Orbital Sciences Corporation). The primary payload on this ORS-3 flight was STPSat-3. 6) 7)
Note
The ELaNa-4 CubeSats were originally manifested on the Falcon-9 CRS-2 flight (launch of CRS-2 on March 1, 2013). However, when NASA received word that the P-PODs on CRS-2 needed to be de-manifested, NASA's LSP (Launch Services Program) immediately started looking for other opportunities to launch this complement of CubeSats as soon as possible. 8) 9) 10)
Orbit
Near-circular orbit, altitude of 500 km, inclination = 40.5º.
Secondary Payloads
The secondary technology payloads on this flight consist of 26 experiments comprised of free-flying systems and non-separating components (2 experiments). ORS-3 will employ CubeSat wafer adapters, which enable secondary payloads to take advantage of excess lift capacity unavailable to the primary trial. 11) 12)
NASA's LSP (Launch Services Program) ELaNa-4 (Educational Launch of Nanosatellite-4) will launch eight more educational CubeSat missions. The ELaNa-4 CubeSats were originally manifest on the Falcon-9 CRS-2 flight. When NASA received word that the P-PODs on CRS-2 needed to be de-manifested, LSP immediately started looking for other opportunities to launch this complement of CubeSats as soon as possible. 13)
Spacecraft | ORS-3 mission sponsor | Spacecraft provider | No of CubeSat Units |
ORS-1 ORSES (ORS Enabler Satellite) | ORS | ORS | 3 |
ORS-2 ORS Tech 1 | ORS | ORS | 3 |
ORS-3 ORS Tech 2 | ORS | ORS | 3 |
Prometheus-1 | SOCOM (Special Operations Command) | LANL (Los Alamos National Laboratory) | 1 x 3 |
Prometheus-2 | SOCOM | LANL | 1 x 3 |
Prometheus-3 | SOCOM | LANL | 1 x 3 |
Prometheus-4 | SOCOM | LANL | 1 x 3 |
SENSE-A | STP (Space Test Program) | SMC/XR | 3 |
SENSE-B | STP | SMC/XR | 3 |
Firefly | NASA/NRO | NSF (National Science Foundation) | 3 |
STARE-B (HORUS) | NRO (National Reconnaissance Office) | Lawrence Livermore National Laboratory | 3 |
Black Knight-1 | NASA LSP/STP | US Military Academy, West Point, NY | 1 |
TetherSat | NASA LSP/STP | US Naval Academy, Annapolis, MD | 3 |
NPS-SCAT | NASA LSP/STP | Naval Postgraduate School, Monterey, CA | 1 |
Ho'ponopono | NASA LSP/STP | University of Hawaii, Manoa, HI | 3 |
COPPER | NASA LSP/STP | St Louis University, St. Louis, MO | 1 |
ChargerSat-1 | NASA LSP/STP | University of Alabama, Huntsville | 1 |
SPA¿1 Trailblazer | NASA LSP/STP | COSMIAC, University of New Mexico | 1 |
Vermont Lunar CubeSat | NASA LSP/STP | Vermont Technical College, Burlington, VT | 1 |
SwampSat | NASA LSP/STP | University of Florida, Gainsville, FL | 1 |
CAPE-2 | NASA LSP/STP | University of Louisiana, Lafayette, LA | 1 |
DragonSat-1 | NASA LSP/STP | Drexel University, Philadelpia, PA | 1 |
KYSat-2 | NASA LSP/STP | Kentucky Space, University of Kentucky | 1 |
PhoneSat-2.4 | NASA LSP/STP | NASA/ARC, Moffett Field, CA | 1 |
TJ3Sat (CubeSat) | NASA LSP/STP | Thomas Jefferson High School, Alexandria, VA | 1 |
ORS and CubeStack 14)
• ORS (Operationally Responsive Space) partnered with NASA/ARC and AFRL to develop & produce the CubeStack
• Multi CubeSat adapter provides “Low Maintenance” tertiary canisterized ride capability
• ORS-3 Mission: Will fly 2 CubeStacks in August 2013. This represents the largest multi-mission launch using a Minotaur I launch vehicle (26 free flyers, 2 experiments).
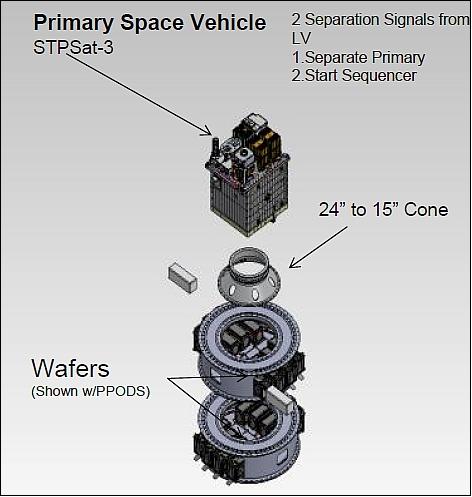
The CubeStack adapter structure is a design by LoadPath and Moog CSA Engineering. 15)
Mission Status
• The SPTSat-3 spacecraft was deployed ~12 minutes after lift-off at an altitude of about 500 km. The Minotaur’s upper stage then executed a pre-planned collision avoidance maneuver before starting deployment of 28 CubeSats sponsored by the ORS office, the U.S. Air Force SMC's (Space and Missile Systems Center) Space Test Program, and NASA’s Educational Launch of Nanosatellites (ELaNa) program (Ref. 6).
References
1) S. Allgeier, V. Nagabhushan, F. Leve, N. Fitz-Coy, “SwampSat – A Technology Demonstrator for Operational Responsive Space,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
2) Sharan Asundi, Matthew Mahin, Vivek Nagabhushan, Tzu Yu Lin, Norman Fitz-Coy, “Composite and PCB Based Implementations of a Solar Panel Design for SwampSat,” Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-III-12, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1207&context=smallsat
3) Josue D. Muñoz, Vivek Nagabhushan, Sharan Asundi, Norman G. Fitz-Coy, “High Fidelity Simulation of SwampSat Attitude Determination and Control System,” Proceedings of the 21st AAS/AIAA Space Flight Mechanics Meeting, New Orleans, Louisiana, USA, Feb. 13-17, 2011,
4) Dante Buckley, Vivek Shrivante, Kunal Patankar, Scott Harden, Paul Muri, Norman Fitz-Coy, “EdUCE, Educate Utilizing CubeSat Experience: a Pragmatic Approach to Shatter Barriers to Space,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-VII-4, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1064&context=smallsat
5) Shawn Johnson, Kunal Patankar, Bungo Shiotani, Norman Fitz-Coy, “Lessons Learned from Student Built CubeSats: SwampSat,” University of Florida, Dept. of Mechanical & Aerospace Engineering, Space Systems Group, September 15, 2012, URL: http://national.spacegrant.org/meetings/presentations/2012_SouthEastern/Shawn_Johnson.pdf
6) “Orbital Successfully Launches Minotaur I Rocket Supporting ORS-3 Mission for the U.S. Air Force,” Orbital, Nov. 19, 2013, URL: http://www.orbital.com/NewsInfo/release.asp?prid=1876
7) Patrick Blau, “Minotaur I successfully launches STPSat-3 & record load of 28 CubeSats,” Spaceflight 101, Nov. 20, 2013, URL: http://www.spaceflight101.com/minotaur-i-ors-3-launch-updates.html
8) Garrett Lee Skrobot, Roland Coelho, “ELaNa – Educational Launch of Nanosatellite Providing Routine RideShare Opportunities,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-V-5
9) Garret Skrobot, “ELaNA - Educational Launch of Nanosatellite,” 8th Annual CubeSat Developers’ Workshop, CalPoly, San Luis Obispo, CA, USA, April 20-22, 2011, URL: https://web.archive.org/web/20190716170813/http://mstl.atl.calpoly.edu:80/~bklofas/Presentations/DevelopersWorkshop2011/21_Skrobot_ELaNa.pdf
10) Peter Wegner, “ORS Program Status,” Reinventing Space Conference, El Segundo, CA, USA, May 7-10, 2012, URL: https://web.archive.org/web/20150423114038/http://www.responsivespace.com/Papers/RS2012/SPECIAL%20SPEAKERS/Dr.%20Peter%20Wegner/Dr.%20Peter%20Wegner.pdf
11) Peter Wegner, “ORS Program Status,” Reinventing Space Conference, El Segundo, CA, USA, May 7-10, 2012, URL: https://web.archive.org/web/20150423114038/http://www.responsivespace.com/Papers/RS2012/SPECIAL%20SPEAKERS/Dr.%20Peter%20Wegner/Dr.%20Peter%20Wegner.pdf
12) Joe Maly, “ESPA CubeSat Accommodations and Qualification of 6U Mount (SUM),” 10th Annual CubeSat Developer’s Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 24-25, 2013, URL: http://www.cubesat.org/images/stories/workshop_media/DevelopersWorkshop2013/Maly_MoogCSA_ESPA-SUM.pdf
13) Garrett Lee Skrobot, Roland Coelho, “ELaNa – Educational Launch of Nanosatellite Providing Routine RideShare Opportunities,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-V-5
14) “CubeStack: CubeSat Space Access,” 9th Annual Spring CubeSat Developers’ Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/27-Maly-CubeStack.pdf
15) Joe Maly, “6U Mount for CubeSats on ESPA,” CubeSat 9th Annual Summer Workshop, Logan UT, USA, August 11-12, 2012, URL: https://web.archive.org/web/20160914101344/http://mstl.atl.calpoly.edu/~bklofas/Presentations/SummerWorkshop2012/Maly_6U_ESPA_Mount.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).