TechEdSat-4 (Technological and Educational Nanosatellite-4)
Non-EO
NASA
Mission complete
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
| Mission status | Mission complete |
| Launch date | 13 Jul 2014 |
| End of life date | 03 Apr 2015 |
TechEdSat-4 (Technological and Educational Nanosatellite-4)
Overview Spacecraft Launch Mission Status Experiment Complement References
TechEdSat-4 is a 3U CubeSat mission developed , integrated by, and tested at NASA Ames (PI: Marcus S. Murbach) in partnership with student interns from SJSU (San Jose State University) in California and the University of Idaho. TechEdSat-4 is funded by NASA Ames and the Human Exploration and Operations Mission Directorate at NASA Headquarters. The objective of the TechEdSat-4 mission is to demonstrate two new technologies including a system to provide satellite-to-satellite communications and information about the spacecraft's health, as well as an upgraded exo-brake device to demonstrate a passive deorbiting system capable of accurately reentering Earth's atmosphere. 1)
The satellite builds on the success and lessons learned from previous TechEdSat projects, particularly TechEdSat-3p, a 3U CubeSat that was deployed on J-SSOD (JEM-Small Satellite Orbital Deployer) from the ISS on Nov. 20, 2013 and became the first mission to perform an in-flight test of an exo-brake passive deorbit system.
TechEdSat-4 is the fourth generation in the continuing TechEdSat Series. The TechEdSat-4 (TES-4) builds upon the success of TES-1, -2, and -3 by continuing to demonstrate increasing capability for CubeSats in the areas of communications and satellite reentry. The TES project uniquely pairs advanced university students with NASA Ames researchers in a rapid design-to-flight experience over the course of 1to2 semesters. The TES Series not only provides a rapid platform for testing technologies for future NASA Earth and planetary missions, but also provides students early exposure to flight hardware development and management. 2)
Spacecraft
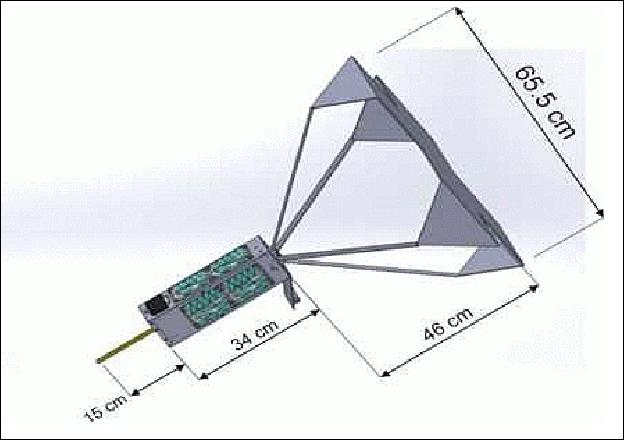
TechEdSat-4 has a size of 10 cm x 10 cm x 34 cm and a mass of 2.68 kg. It uses COTS (Commercial Off-The-Shelf) components and largely reuses heritage components that flew on the TechEdSat-1 and TechEdSat-3p missions (launch Aug. 3, 2013). TechEdSat-1 (launched on July 21, 2012) was a 1U CubeSat designed to test the basic satellite design, avionics, stabilization and communication systems. This 1U CubeSat bus is essentially reused on TechEdSat-4 to provide the basic satellite functions such as commanding, power generation & supply as well as communications while the other 2 units of the satellite (2/3 of its volume) carry the payload. 4)
EPS (Electrical Power Subsystem)
The TechEdSat EPS features a scalable plug-and-play architecture that allows the addition of batteries and solar panels transitioning from a 1U to a 3U spacecraft. The satellite features body-mounted solar panels, dedicated electronics for power distribution and the management of the state of charge of a Li-ion battery. Latch-up current limiters are used for circuit protection.
Spacecraft control is provided by a ÅAC Microtec microprocessor that controls all satellite functions including attitude control and communications, that are accomplished via Iridium and GPS satellites, using a short-burst data modem. TechEdSat-4 is also demonstrating a satellite-to-satellite communications system that will allow for more frequent communication sessions with the satellite that lead to a higher accuracy of satellite altitude and position predictions which are important for the operation of the exo-brake.
Launch
The TechEdSat nanosatellite was launched as a secondary cargo payload on July 13, 2014 on the Cygnus CRS Orb-2 ISS resupply mission. The launch vehicle was Antares-120 of OSC and the launch site was MARS (Mid-Atlantic Regional Spaceport), Wallops Island, VA. The pressurized Cygnus spacecraft delivered 1,657 kg of cargo to ISS, including 300 kg of standard crew supplies, systems hardware and of science and research equipment. 5)
Orbit
Near-circular orbit , initial altitude of about 350-400 km, inclination 51.6º.
Secondary Payloads on the Cygnus CRS Orb-2 Mission 6)
• Planet Labs' Flock-1b: A flock of 28 nanosatellites (additional to 28 Flock-1 nanosatellites launched on January 9, 2014) from Planet Labs of San Francisco are aboard to take pictures of Earth. After deployment from the Japanese JEM module (using the NanoRacks LLC Smallsat Deployment Program). Once deployed, these two flocks will work in unison and capture imagery of the entire planet on a more frequent basis, forming the largest constellation of imaging satellites in Earth orbit. 7) 8)
• TechEdSat-4 is a small CubeSat, built by NASA/ARC (Ames Research Center) in California that will investigate technology to return small samples to Earth from the space station. TechEdSat-4 will deploy using the NanoRacks services. Its primary objectives are to further develop a tension-based drag device, called exo-brake, and demonstrate frequent uplink/downlink control capabilities.
• MicroMAS-1 (Microsized Microwave Atmospheric Satellite-1), a 3U CubeSat of MIT/LL (Massachusetts Institute of Technology/Lincoln Laboratory). The objective is to provide unprecedented observations of hurricanes and tropical storm dynamics.
• GEARSSAT (Globalstar Experiment And Risk Reduction Satellite) , a CubeSat with a Globalstar communications terminal,built by NearSpace Launch. The objective is to study the Globalstar communications constellation.
• LambdaSat, a 1U Cubesat developed and operated by the Lambda Team, an international group including Greek scientists and students from San Jose, USA. The objective is to measure radiation effects on graphene material in LEO, and tracking vessels with an AIS receiver inside its footprint around the globe.
• Fifteen student experiments of the "Charlie Brown" mission are aboard and hosted by the SSEP (Student Spaceflight Experiment Program), an initiative of NCESSE (National Center for Earth and Space Science Education) and NanoRacks. They will investigate plant, lettuce, raddish and mold growth and seed germination in zero-G, penecilium growth, corrosion inhibitors, oxidation in space and microencapsulation experiments.
• Ten internal payloads from NanoRacks' customers are holding dozens of research experiments onboard.
• SPHERES (Smart Synchronized Position Hold, Engage, Reorient Experimental Satellites) experiment of NASA/ARC features a sensor and multiple cameras to enable 3-D mapping and robotic navigation inside the space station.
General NanoRacks CubeSat/Nanosatellite Deployment Concept
The NanoRacks CubeSats/nanosatellites are delivered to the ISS already integrated within a NRCSD (NanoRacks CubeSat Deployer). The NRCSDs can be stored inside the ISS until a deployment is requested. 9)
The secondary payloads (Flock-1b, TechEdSat-4, MicroMAS-1, GEARSSAAT, and LambdaSat) will be deployed from the Space Station using a deployment mechanism supplied by NanoRacks LLC. The System uses the MPEP (Multi-Purpose Experiment Platform) of the JEM (Japanese Experiment Module) to which the NRCSDs (NanoRacks CubeSat Deployers) are attached. The dispenser holds up to sixteen 3U CubeSats and is attached to the MPEP that can be grappled by the JRMS (JEM Remote Manipulator System) and deploy the satellites in pairs upon command issued from inside the ISS or the JAXA Control Center in Tsukuba, Japan.
For a deployment, the platform is moved outside via the Kibo Module's Airlock and slide table that allows the JRMS arm to move the deployers to the correct orientation for the satellite release and also provides command and control to the deployers. Each NanoRacks CubeSat Deployer is capable of holding six CubeSat Units - allowing it to launch two 3U satellites or a number of 2U and 1U satellites.
Deploying CubeSats from ISS has a number of benefits. Launching the vehicles aboard the logistics carrier of ISS visiting vehicle's reduces the vibration and loads they have to encounter during launch. In addition, they can be packed in protective materials so that the probability of CubeSat damage during launch is reduced significantly. Also, once arriving at the Space Station, the satellites can be checked pre-deployment, making sure any damage is detected before committing them to flight.
Mission Status
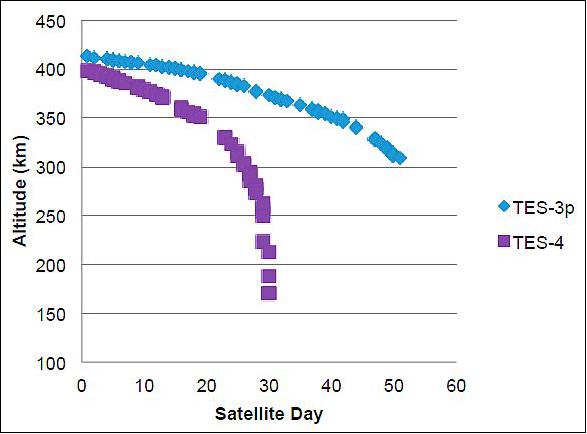
• Aug. 2016: The TechEdSat-4 (TES-4) exo-brake deployed, changed the drag on the CubeSat, resulting in early orbital reentry. The time frame for deorbit and the quantitative drag assessment from this experiment is very useful for designing future SPQR (Small Payload Quick Return) methods and spacecraft. TechEdSat-4 experienced a 4 week deorbit in 2015. 10)
- The future TES-5/PS5 features improved GPS tracking and a modulated exo-brake allowing more precise control of the exo-atmospheric drag and therefore the reentry time and location. The TES-5/PS5 is a significant upgrade from TES-4, featuring an improved C&DH built around the Intel Edison mobile computing platform, the core of new PhoneSat. This CubeSat has an ISM-band WiFi downlink for data, significantly reducing the cost of such communication services. It features multiple cameras to help verify exo-brake deployment and modulation. The GPS tracking should give precise orbital trajectories leading to much better drag assessment, reentry targeting and other benefits.
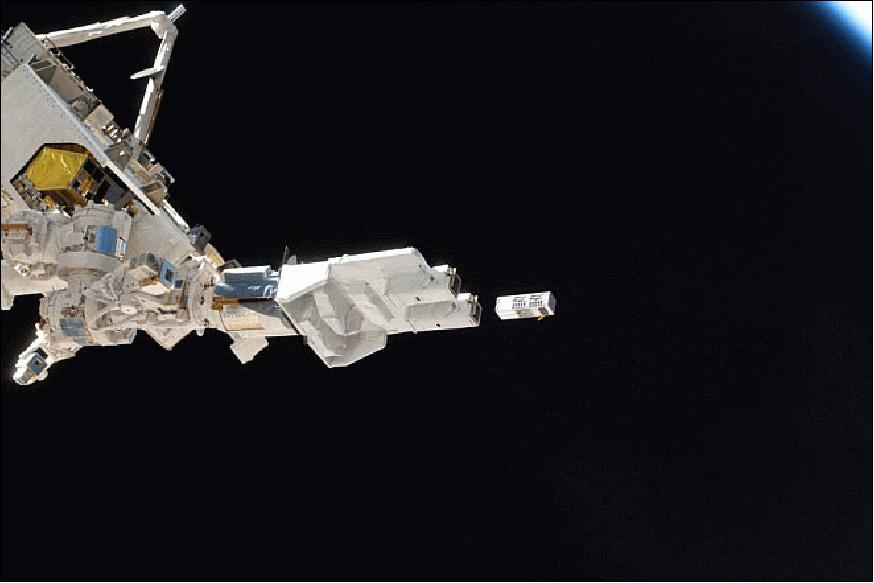
• After an ISS onboard waiting period of 8 months (Table 1), the TechEdSat-4 nanosatellite was deployed on March 3, 2015. NASA mission controllers confirmed that a small satellite has successfully entered its orbit, setting the stage to test technology that could enable rapid return of payloads from space. Over the next four weeks, the TechEdSat-4 satellite will deploy a second-generation exo-brake, an aerodynamic drag device, to perform a maneuver that will cause the satellite to de-orbit and reenter Earth's atmosphere. 11)
- About 30 minutes after the Nanoracks CubeSat Deployer jettisoned it from the space station, the autonomous free-flying satellite powered on. The spacecraft received a command via email and deployed its specially-designed parachute-like exo-brake, which operates as a passive drag device at the extremely low pressures found at the top of the atmosphere. Engineers also confirmed the satellite has demonstrated new satellite-to-satellite communications technologies to provide precise information about the spacecraft's health and position.
- TechEdSat-4 is equipped with a short-burst data satellite modem combined with a GPS receiver to perform communications functions, including providing data about the spacecraft's health, space environment and location. Together, these technologies replace ground stations used for tracking, rapid data retrieval and uplink capability, and permit satellite control via secure email.
Background of the NRCSD Breakdown and Renewed System Provision which Caused Considerable Deployment Delays for Several Customers 12)
NanoRacks LLC of Houston, TX, is the only commercial company of NASA, providing on-board and on-ground services to the general 'small payload' research community of the International Space Station (ISS).
The NanoRacks deployment services for small satellites started initially by using the J-SSOD (JEM-Small Satellite Orbital Deployer) of JAXA. In October 2012, NanoRacks became the first company to coordinate the deployment of small satellites (CubeSats/nanosatellites) from the ISS via the airlock in the Japanese Kibo module. This deployment was done by NanoRacks using J-SSOD.
In 2013, NanoRacks sought permission from NASA to complement the JAXA J-SSOD with a larger model, NRCSD (NanoRacks CubeSat Deployer) , provided by NanoRacks to hold larger and more satellites. This new NanoRacks deployer system, was designed, manufactured and acceptance-tested by NanoRacks and launched on the Orbital Sciences Cygnus CRS-1 flight on January 9, 2014. It permitted NanoRacks the subsequent release of 33 CubeSats of their customers, using the new NanoRacks deployer system with the JEMRMS (JEM-Remote Manipulating System) of JAXA – to grapple and position for deployment.
The NRCSD deployer system broke down in August 2014, failing to release satellites when commanded. During the troubleshooting process in September, two satellites were inadvertently released. The deployers were returned inside the ISS through the airlock in the Japanese Kibo module in mid-September.
NanoRacks had built new deployers to correct the problem, it worked with NASA and other ISS partners to also attempt to repair the deployers currently on the station. After several months of hard work, the NanoRacks team was able to make adjustments to the deployers. The problems with the deployers were traced to screws that were not tightened correctly as well as issues with a power feed.
The repair work included installation of a new electronics system for the deployer and latches to prevent the premature deployment of the satellites. A SpaceX Dragon cargo spacecraft delivered the repair hardware to the ISS in January 2015. The station's crew made the repairs and successfully tested the latches on Feb. 17, and planned to attempt satellite deployments in the week of Feb. 23, 2015.
Since Feb, 27, 2015, a new deployment window opened. Included were 12 Planet Labs Doves (10 Flock-1B, 2 Flock-1D'), Spaceflight Services and MIT's MicroMAS, San Jose University and Greece's LambdaSat, NASA Ames' TechEdSat-4, and the GEARRSat CubeSat. 12)
• On July 16, 2014, Cygnus CRS Orb-2 arrived at the ISS and was captured by Commander Steve Swanson as he maneuvered Canadarm2 from a robotics workstation inside the station's seven windowed domed Cupola. In the following days, the station crew will unload the cargo from the docked spacecraft. The first CubeSat deployment via the NanoRacks deployer is now scheduled for the end of July. It should take about a week to deploy the first block of CubeSats. 13)
Cygnus will remain attached to the station approximately 30 days until August 15, 2014. 14)
Experiment Complement
Exo-Brake
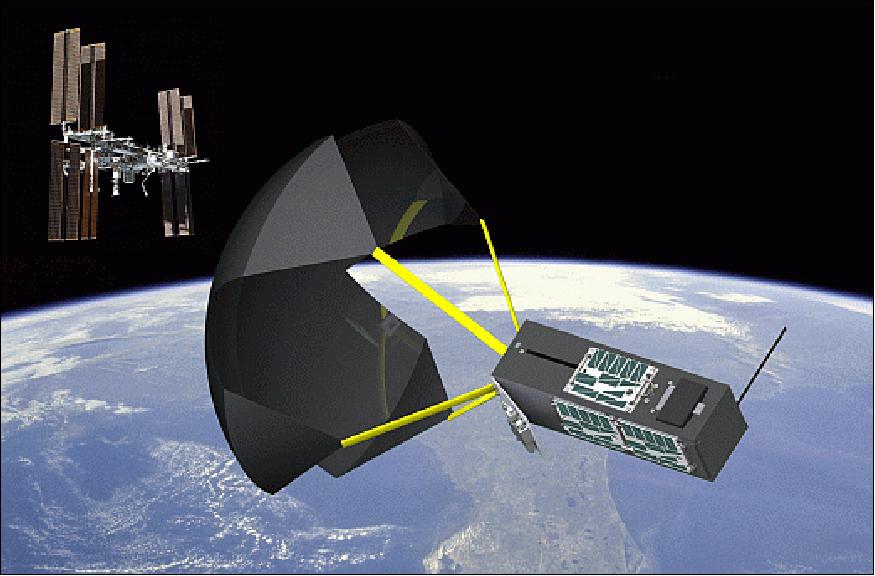
The exo-brake is deployed once the satellite is released to demonstrate a passive deorbit system for satellites. The assembly is a simple drag-based deorbit mechanism, like a specially designed parachute that operates at extremely low pressures, which will eventually enable small samples to be returned from the space station or other orbital platforms. Exo-brake is a tension based structure that has a number of advantages over other designs such as a high stability and the possibility of drag modulating to provide a targeting capability.
The initial exo-brake version was successfully flown on the TechEdSat-3 nanosatellite in late 2013. The evolving instrument set of TechEdSat-4 includes an onboard GPS receiver, as well as a novel command uplink/downlink capability. The principal objectives are to further develop the tension-based drag device (exo-brake) and demonstrate a frequent uplink/downlink control capability. 15)
The next steps will include a drag- modulation scheme which will lead to improved targeting at the von Karman altitude. Future applications include a sample return capability – as well as a novel means of testing future small scale reentry concepts for planetary mission applications. 16)
Intersatellite Communication
The objective of the evolving TechEdSat-4 experiment is to demonstrate the use of an Iridium modem combined with a GPS receiver as well as a novel command uplink/downlink capability to communicate accurate positional and deorbit information.
Eventually, these will be combined to provide a controlled sample return capability from the ISS or other orbiting platforms.
References
1) Rachel Hoover, Maria Alberty, NASA Ames Launches Smartphone Upgrade and CubeSat Aboard Orbital Rocket," NASA/ARC, July 8, 2014, URL: http://www.nasa.gov/ames/nasa-ames-launches-smartphone-upgrade-and-cubesat-aboard-orbital-rocket/#.U8ffMUC4Ri0
2) "TechEdSat-4: Nano-Satellite Series — Technologies for Passive Reentry, Future Sample Return and Mars Missions," NASA facts, April 16, 2015, URL: https://www.nasa.gov/sites/default/files/atoms/files
/techedsat4-508-16april2015.pdf
3) "Technical and Educational Satellite," URL: http://www.techedsat.co/index.html
4) Patrick Blau, "Cygnus Orb-2 Cargo Manifest," Spaceflight 101, 2014, URL: http://www.spaceflight101.com/cygnus-orb-2-cargo-manifest.html
5) "Orbital-2 Mission to the International Space Station," NASA Media Press Kit, July 2014, URL: http://www.nasa.gov/sites/default
/files/files/Orb2_PRESS_KIT.pdf
6) Patrick Blau, "Cygnus Orb-2 Cargo Manifest," Spaceflight 101, URL: http://www.spaceflight101.com/cygnus-orb-2-cargo-manifest.html
7) "Orbital Sciences' Successfully Berthed Cygnus to ISS in Second Resupply Mission," NanoRacks Press Release, July 16, 2014, URL: http://nanoracks.com/orbital-sciences-successfully-berthed-cygnus-to-iss-in-second-resupply-mission/
8) "Spaceflight, NanoRacks Partnership Launches Additional Planet Labs Flock Onboard Orbital Sciences' Orb-2 Mission," Spaceflight Inc., July 16, 2014, URL: http://spaceflightservices.com/tag/launch/
9) "NanoRacks-Microsized Microwave Atmospheric Satellite (NanoRacks-MicroMAS)," NASA, July 15, 2014, URL: http://www.nasa.gov/mission_pages/station/research
/experiments/1330.html#operations
10) M. Murbach, R. Alena, A. Guarneros Luna C. Priscal, R. Shimmin J. Wheless, F. Tanner, R. Morrison, K. Oyadomari, P. Papadopoulos, D. Atkinson, TES/PSAT-Team, "The TechEdSat/PhoneSat Mission for Small Payload Quick Return," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi
?article=3490&context=smallsat
11) "NASA Deploys Satellite Designed to Re-enter Atmosphere Using Revamped Drag Device," NASA, March 4, 2015, (last updated on July 31, 2015, URL: http://www.nasa.gov/ames/nasa-deploys-satellite-designed-to-re-enter-atmosphere-using-revamped-drag-device/#.VQBVDuH-b_U
12) "NanoRacks Completes Historic Third Round of ISS CubeSat Deployments," Space Daily, March 11, 2015, URL: http://www.spacedaily.com/reports/NanoRacks_Completes_Historic
_Third_Round_of_ISS_CubeSat_Deployments_999.html
13) "Orbital Sciences' Successfully Berthed Cygnus to ISS in Second Resupply Mission," NanoRacks, July 16, 1014, URL: http://nanoracks.com/wp-content/uploads/NanoRacks-Release-26-Cygnus-Successfully-Berthed-to-ISS.pdf
14) Ken Kremer, "Cygnus Commercial Resupply Ship ‘Janice Voss' Berths to Space Station on 45th Apollo 11 Anniversary," Universe Today, July 16, 2014, URL: http://www.universetoday.com/113281/cygnus-commercial-resupply-ship-berths-to-space-station-on-45th-apollo-11-anniversary/
15) "The Development of On-Demand Sample Return Capability (SPQR) (TechEdSat-4)," NASA, July 15, 2014, URL: http://www.nasa.gov/mission_pages/station
/research/experiments/1815.html
16) M. Murbach, P. Papadopoulus, D. Atkinson, A. Reuter, J. Mojica, A. Guarneros-Luna, M. Scales, J. Benson, J. Seneris, K. Sok, M. Bodmer, "The TechEdSat NanoSatellites and Exo-Brake De-orbit Mechanism: Recent Flight Experience," 11th International Planetary Probe Workshop, Pasadena, CA, USA, June 16-20, 2014
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Experiment Complement References Back to Top