TechnoSat / TubSat-12 (Technische Universität Berlin Nanosatellite -12)
Non-EO
Operational (extended)
Education
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Operational (extended) |
| Launch date | 14 Jul 2017 |
TechnoSat / TubSat-12 (Technische Universität Berlin Nanosatellite -12)
Spacecraft Launch Mission Status Sensor Complement/Experiment References
TechnoSat is a nanosatellite mission (with 20 kg actually a microsatellite) of TU Berlin (Technische Universität Berlin) with the primary objective to provide an on-orbit demonstration capability for novel nanosatellite technologies and components. The satellite carries several payloads:
- Camera
- Fluiddynamic Actuator
- S-band transmitter HISPICO
- Laser Retroreflectors 1)
- Solar Generator Impact Detector
- Star Tracker STELLA
- Reaction Wheel System.
The secondary mission objective of TechnoSat is OOV (On-Orbit Verification) of the novel adaptive nanosatellite bus TUBiX20 (TU Berlin innovative neXt generation 20 kg nanosatellite bus). 2) 3) 4) 5)
The TechnoSat project is funded by the Federal Ministry for Economic Affairs and Energy (BMWi) through the DLR (German Aerospace Center).
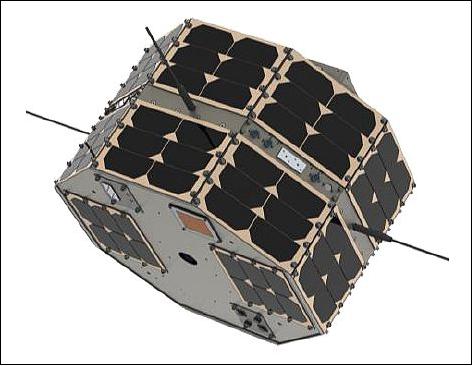
Spacecraft
TU Berlin is developing a nanosatellite bus, which is easily adoptable to a variety of missions, payloads and orbits. The development builds on 25 years experience in satellite development in which TU Berlin launched 10 satellites. The TUBiX platform is developed in two versions, for a 10 kg and the 20 kg mission, namely TUBiX10 and TUBiX20. Currently, three missions based on TUBiX are being developed at TU Berlin, namely the S-Net, the TechnoSat, and the TUBIN (TU Berlin Infrared Nanosatellite) mission. 6) 7)
TechnoSat is the first mission based on the TUBiX20 bus. The highly modular structure of the bus allows for adopting it to different payload sizes and power requirements by adjusting its height and adding customized solar panels. In order to increase the reliability of the bus, the design follows a consistent single-failure tolerant approach that builds on different cold and hot redundancies. Therefore, any one component may fail without jeopardizing the mission. The attitude control system of the TUBiX20 platform can be easily adapted to any mission. It ranges from a coarse but highly energy efficient system, solely based on magnetic torquers as actuators to a high precision system with a pointing accuracy of ~10 arcmin.
TUBiX20
The TUBiX20 systems architecture describes the high-level design of the platform. TUBiX20 is based on a distributed system of microcontroller nodes that communicate on a redundant data bus system and are powered by a redundant power bus. The minimal configuration of the platform is built around four main nodes; the communication subsystem node (COM node), the electrical power subsystem node (EPS node), the on-board computer node (OBC node), and the attitude determination and control subsystem node (ADCS node).
The warm redundantly operating EPS node manages the power and data bus and supervises the redundancy of all other nodes in the system. The COM node provides a UHF link for platform communications to the ground station. Satellite mode management as well as telemetry storage is performed by the OBC node, while the ADCS node is responsible for measuring and controlling the satellites attitude.

A Node is defined as a set of two independent microcontrollers which are interfacing with the central data bus system of the platform. The node as functional unit is referred to as logical node, whereas a specific microcontroller of a logical node is called physical node. - A logical node is a TUBiX20 node if it is compatible with the TUBiX20 software infrastructure. Additionally, a TUBiX20 node shall implement reference components and circuitry wherever possible. If a node interfaces with the TUBiX20 interface but does not support the software infrastructure, it is referred to as alien node. An alien node requires a software application running on a TUBiX20 node which translates its protocols for the TUBIX20 system (Ref. 7).
Besides these primary nodes, the electronics box houses the power conditioning units that manage battery charging and generate different levels for the power bus, which are also realized as plug-in cards. All other components required for a certain mission, such as a payload data handling node or attitude sensors and actuators, can be added according to need, either in the electronics box or as self-contained units. If a component does not directly support the TUBiX20 interface, it can be integrated into the system by the use of additional hard- and/or software. An example here is the fiber optic rate sensor system that is used in the TechnoSat mission. Here, three rate sensors are connected to a TUBiX20 node situated in the electronics box of the satellite.
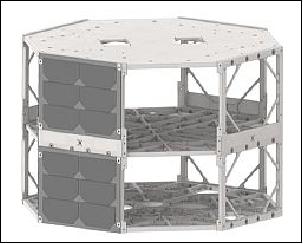
Hardware Structure
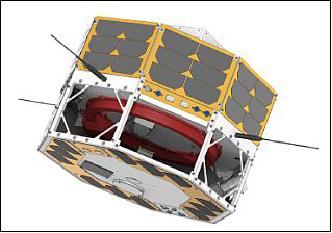
The TUBiX20 structure is developed with modularity and standardization in mind. The octagonal primary structure is based on only three types of structural elements where special emphasis was placed on ensuring the inexpensive producibility of these parts. Four outer frames provide a form closed interface to the decks of the structure to guarantee vibration stiffness of the assembly. Outer panels provide space for solar cells and enhanced stiffness of the structure. Figure 3 shows the primary structure of TechnoSat to illustrate the approach.
The primary objective of the TechnoSat mission is the OOV of novel nanosatellite components. The secondary mission objective is the development and demonstration of the TUBiX20 nanosatellite bus. In this manner TechnoSat shall provide risk mitigation for the TUBIN mission, which will be launched one year after TechnoSat and is also based on TUBiX20. Due to the fact, that the payloads of the TechnoSat mission do not require high accuracy in pointing, the coarse attitude control system of TUBiX20 is included in the mission, providing a pointing knowledge of approximately 15 º and three-axis stabilization of~20º accuracy.
During the mission duration of one year, the capabilities of the different payloads and bus subsystems shall be demonstrated and their performance parameters shall be evaluated.
Spacecraft design life | 1 year |
Spacecraft mass, size | ~20 kg |
Spacecraft size | 465 mm x 460 mm x 305 mm |
ADCS sensors | Fiber-optic gyros, sun sensors, MEMS magnetic field sensors, MEMS gyros |
ADCS actuators | Magnetic torquers |
RF communications | UHF link |
Software Infrastructure
The TUBiX20 software runs on RODOS, a realtime operating system based on building blocks, which was specifically designed for the application on small satellites. The TUBiX20 software infrastructure is realized to minimize the software development efforts despite the comparatively high number of nodes in the system, and thus complements the distributed hardware system design. The software infrastructure defines the communication interface between the nodes and provides a library with all generic software functionality which is implemented identically for all nodes.
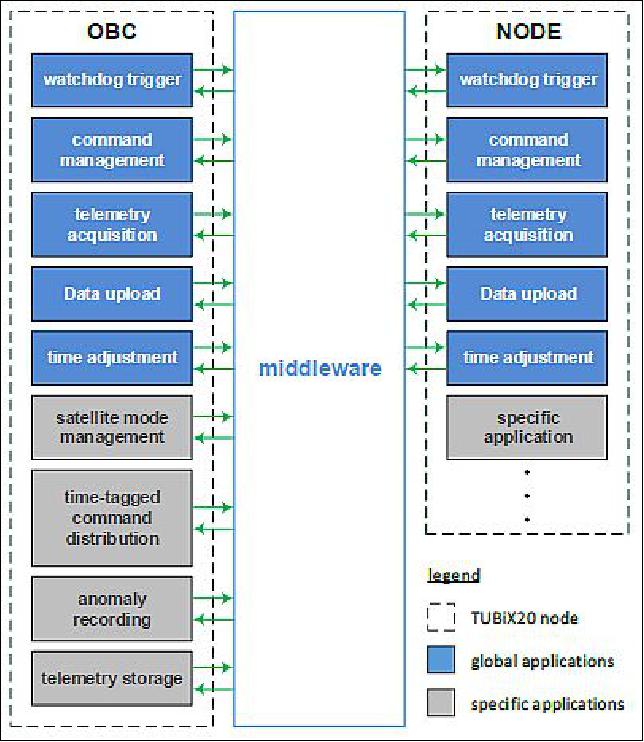
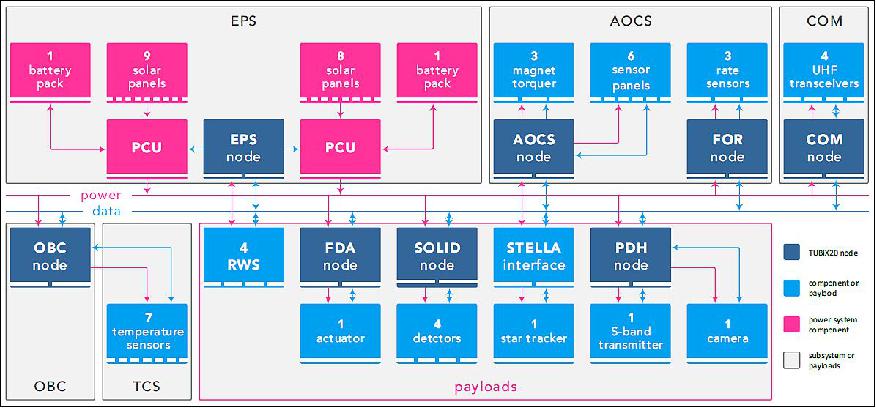
Figure 5 gives an overview over the different subsystems and components of the TechnoSat spacecraft together with their power (red) and data(blue) interconnections, whereas the different subsystems are gathered in light grey boxes.
For power generation the spacecraft is equipped with two strings of solar panels that include seventeen solar panels in total and generate an orbit average power of approximately 16 W. Each of the two power strings comprises its own PCU (Power Conditioning Unit) and battery pack. The EPS (Electrical Power Subsystem) node fulfils a monitoring function for the entire spacecraft, as it controls the redundancy of all satellite nodes.
The COM subsystem is built by a cold redundant node and four UHF transceivers. Here, each instance of the node operates two of the UHF transceivers in hot redundancy, if activated.
The ADCS of TechnoSat includes IC magnetometers, MEMS gyroscopes and sun sensors, each located on six sensor panels located on six sides of the satellite. Each sensor panel comprises two totally separated sets of sensors which are connected to the ADCS node by separated data busses. In addition, three FOR (Fiber Optic Rate) sensors,that connect to a dedicated TUBiX20 FOR node, allow for high accuracy rate measurements. For actuation, TechnoSat features three torque rods controlled by the ADCS node.
The OBC of TechnoSat is formed by another TUBiX20 node of the system. Aside from telemetry and anomaly storage, the OBC is responsible for satellite mode management, as well as for the assembly of the transfer frames to be downlinked to the ground station by the COM system.
TCS (Thermal Control Subsystem)
A passive TCS is used, the temperatures are mainly reported by the individual components independently. However, the OBC reads seven external sensors to measure the temperature at various points of the primary structure to gain a comprehensive overview of the temperature distribution within the spacecraft.

Launch
TechnoSat was launched as a secondary payload on 14 July 2017 (06:36:49 UTC, 09:36:49 Moscow time) on a Soyuz-2.1a FG/Fregat-M vehicle from Baikonur, Kazakhstan. The primary payload on this flight was Kanopus-V-N1 of Roscosmos with a mass of ~ 500 kg. 8) 9) 10) 11)
Orbit
Sun-synchronous orbit; injection of the primary payload and smallsats into 3 different orbits (the orbit of Kanopus-V-IK is ~500 km, the orbit of Flying Laptop and TechnoSat is 600 km, the orbit of Dove 3U CubeSats is 475 km).
Secondary Payloads
In total, 72 secondary satellites will be launched on the Kanopus-V-IK mission, including spacecraft for four separate commercial remote sensing and weather constellations (total mass of secondary payloads is 120 kg).
Glavkosmos, a subsidiary of Russian state space corporation Roscosmos, is seeking to become a larger provider of rideshare launch services for small satellites. In addition to this upcoming launch, Glavkosmos is planning to fly about 40 more small satellites on two Soyuz missions from the new Vostochny Cosmodrome in Russia's Far East region late this year, with additional launch opportunities planned for 2018 and beyond.
In addition, the German Orbital Systems company of Berlin, ECM Space Technologies GmbH, actively participates in the launch, by supplying a DCSM (Deployment Control and Separation Sequence Management) unit. Integration of two secondary satellites built in Germany, three from Russia and 12 from the USA. GlavKosmos subcontracted this task to ECM. 12)
• Forty-eight (48) Dove satellites (Flock 2k) of Planet will be launched into an SSO of 485 km altitude. 13) Planet of San Francisco is the biggest single customer for the upcoming launch. This "flock" of 48 satellites will go into a sun-synchronous orbit, but one slightly different from those of 88 similar satellites launched on an Indian Polar Satellite Launch Vehicle in February. Those satellites went into a sun-synchronous orbit that crosses the equator at 9:30 hours local time. The new satellites will launch into an orbit that crosses the equator at about 11:00 hours local time.
• Spire Global of San Francisco, which is deploying a fleet of CubeSats to collect GPS radio occultation and ship tracking data, has eight (8) of its Lemur CubeSats on this launch.
• GeoOptics of Pasadena, CA, is flying its three CICERO 6U CubeSats (CICERO-1, -2,- 3), designed to collect GPS radio occultation data to support weather forecasting.
• Flying Laptop, a minisatellite (120 kg) of IRS (Institute of Space Systems), University of Stuttgart, Germany.
• WNISAT- 1R (Weather News Inc. Satellite 1R), a microsatellite (43 kg) for north arctic routes and atmosphere monitoring. The project is started from the commercial objects between Weathernews and Axelspace, Japan. The object of the WNISAT-1R mission is monitoring of the Northern sea routes and of the CO2 content of the atmosphere. 14)
• NorSat-1 and NorSat-2 of the Norwegian Space Center, built by UTIAS/SFL (Canada) on GNB (Generic Nanosatellite Bus), each with a mass of 15 kg. The NORSAT-2 satellite will carry a next generation Automatic Identification System (AIS) receiver from Kongsberg Seatex, along with a VDE (VHF Data Exchange) payload that will enable two-way communication at higher data rates than possible with AIS. NorSat-1 (< 30 kg) carries three instruments: An AIS receiver, a Langmuir Probe Instrument, and CLARA (Compact Lightweight Absolute Radiometer), intended to observe total solar irradiation and variations over time.
• TechnoSat is a nanosatellite project (18 kg) of the Technical University of Berlin. Test of new nanosatellite components, including a camera, a new reaction wheel system, a star tracker, a transmitter, a fluid dynamic actuator, and commercial laser retro-reflectors.
• Corvus-BC 1 and Corvus-BC 2: Astro Digital, formerly known as Aquila Space, (formed from the core team of the former Dauria Space daughter Canopus Systems) developed the Corvus-BC Earth observation CubeSats (6U, 10 kg). The Landmapper-BC spacecraft, also known as Corvus-BC1 and Corvus-BC2, have color and infrared cameras for wide-area imaging.
• MKA-N 1, 2: Two Earth observation CubeSats (6U, 10 kg each) of Roskosmos, built by Dauria Aerospace.
• NanoACE, a technology demonstrator by Tyvak Nanosatellite Systems, Inc. (Irvine, CA) to validate the Endeavor suite technologies that will be used for future missions and is solely for the purpose of internal Tyvak development as an attitude control experiment. A 3U CubeSat (5.2 kg).
• Mayak: A Russian 3U CubeSat (4kg) developed by a group of young scientists named "Your sector of space" with support of the Moscow State University of Mechanical Engineering (MSUME). In orbit, the 3U CubeSat will deploy four triangular reflectors, 4 m2 each, which form a tetrahedral shape. The reflectors are made from metalized membrane with reflection coefficient of 95%. The reflector will provide a -10 optical magnitude at the beginning of the flight to allow for easy tracking. Mayak will be put into a tumbling motion over all axes, with at least 1 revolution per second.
• Iskra-MAI-85, a CubeSat of the Moscow Aviation Institute. 15)
• Ecuador-UTE-YuZGU, a CubeSat of the Kursk South-Western State University, Russia.
Mission Status
• May 2019: After launch and commissioning of TechnoSat in 2017, experiments have been conducted continuously to evaluate the performance of payloads and platform. Furthermore, updating the flight software allowed to integrate payloads like the S-band transmitter and the reaction wheels into the platform to extend its functionality. 16)
- The S-band transmitter is now routinely used to downlink pictures and telemetry data. In this manner, several hundreds of pictures can be downlinked in one pass of the satellite instead of only one that could be downloaded via UHF in the same time. This enables the extensive use of the camera for the evaluation of the absolute attitude determination and control performance of the spacecraft. Furthermore, experiments can be conducted at a much faster pace and more data can be recorded due to the extended telemetry downlink capacity.
- The improvements were achieved by means of several software updates to establish the following capabilities. The onboard computer node needed to be updated to be able to provide larger amounts of historical telemetry data to the payload data handling (PDH) via the centralized data bus for S-band downlink. The PDH required an extension of its storage capacity. While only five pictures could be stored at the beginning of the mission, this was soon extended to more than one thousand, which is sufficient to record an entire coherent orbit in nadir-pointing. Furthermore, the PDH required the functionality to redirect the telemetry data received from the OBC to the S-band transmitter.
- Initially, it was planned to only test the wheels individually using a test application implemented on the PDH. However, this application was extended and migrated to the ADCS node to enable three-axis attitude control. Consequently, the reaction wheels are now routinely used to perform nadir, inertial and target pointing, which significantly improves downlink quality and enables a wide variety of new experiments.
- These reconfigurations that were partly implemented after the satellite was already launched to orbit greatly benefitted from the modular hard- and software of the TUBiX20 platform, which is realized as a distributed network of computing nodes which communicate via a middleware. These nodes decouple the individual subsystems and devices from each other and therefore allow to modify processing tasks without interference with other parts of the software. Within the different layers of the software architecture, unified interfaces allow to directly integrate new functionality such as additional control algorithms.
- After fulfilling all mission requirements within nominal mission duration of one year, TechnoSat is still fully functional and is now operated within an extended mission were experiments are focussed on the preparation of the follow-up mission TUBIN. Furthermore, TechnoSat is used in lectures of Technische Universität Berlin for hands-on training in satellite operations.
• October 2018: TechnoSat is the first spacecraft that is based on the newly developed TUBiX20 platform of Technische Universität Berlin (TU Berlin). It was launched on 14 July 2017 and successfully conducts payload operations since then. 17)
- Within the first year of the mission, the platform could demonstrate key performance parameters regarding three axis stabilization and payload data downlink that will be further exploited in the follow-up mission TUBIN (Technische Universität Berlin Infrared Nanosatellite). As Earth observation mission carrying cameras for infrared and the visible spectrum as payload, TUBIN will need to perform complex observation experiments that include pointing the payloads towards multiple different targets for capturing images and calibration frames and downloading large datasets.
TechnoSat Orbit Operations
- After the first signals of the spacecraft were received during the first pass over the ground station in Berlin, the launch and early orbit phase (LEOP) as well as the commissioning of the platform was conducted until September 2017. This included a software update to optimize the performance of the attitude determination and control system based on data gathered on orbit.
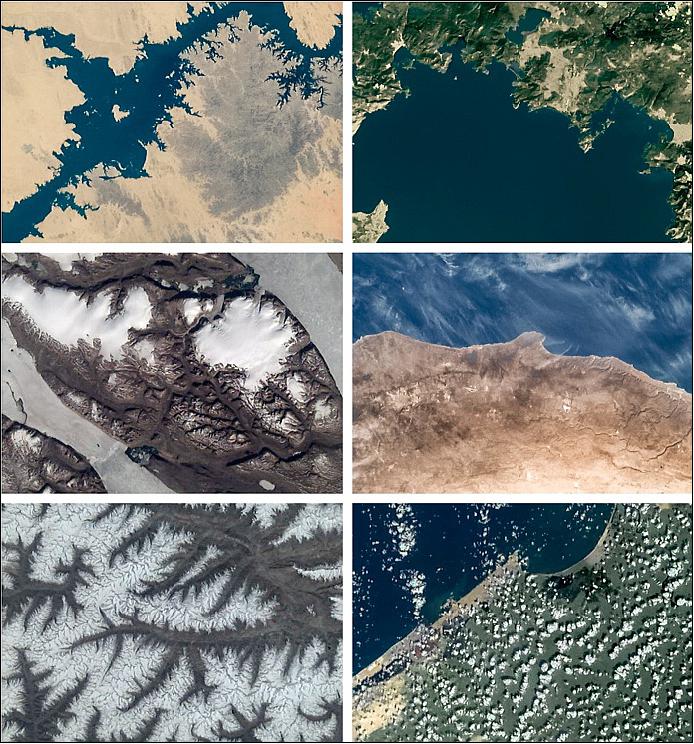
- Payload commissioning was performed partly in parallel to the platform commissioning activities between August and September 2017. Subsequently, the regular payload experiments started while experiments to assess the performance of the platform were conducted in parallel. Although it was originally only planned for a later stage of the mission, multi-payload experiments could already be carried out as early as in October, just three months after launch. Here, the reaction wheel system was used to control the attitude of the satellite, while the camera took several pictures of the Earth. In November, the S-band transmitter was added to this scenario, so that pictures taken during a pass of the ground station could immediately be sent to the ground. A collection of color corrected images captured by TechnoSat's camera payload is shown in Figure 7.
- These pictures were also used as absolute reference for assessing the attitude determination and control performance of the platform. It could be shown that a pointing accuracy of better than five degrees is feasible with the given set of sensors using the reaction wheels as attitude actuators.
- After extensive testing, the S-band transmitter and the reaction wheel system were cleared for use as regular platform components in January 2018. This was followed by a major software update in May 2018, significantly increasing the performance of the platform, including the following capabilities:
1) Downlink of telemetry data via the S band transmitter
2) Extension of the image storage capabilities from five to 1,023 pictures
3) Reduction of the time to capture and store an image from 23 s to 6.6 s
4) Addition of a streaming mode, allowing to directly downlink pictures from the camera to the ground, without storing them on the spacecraft
5) Angular momentum management of reaction wheels to avoid zero-crossings
6) Simplified and improved handling of time tagged operations increasing on-board autonomy.
- The streaming mode was mainly implemented to visually confirm the performance of the target pointing towards the ground station in operated passes.
- All implemented updates were developed bearing in mind the requirements of the TUBIN mission. These are mainly concerned with different pointing modes required by the payload for calibration and Earth observation tasks, as well as for data downlink. Further relevant aspects are processing large amounts of data on the spacecraft, as well as effective means to reconfigure the satellite according to the needs of different experiments.
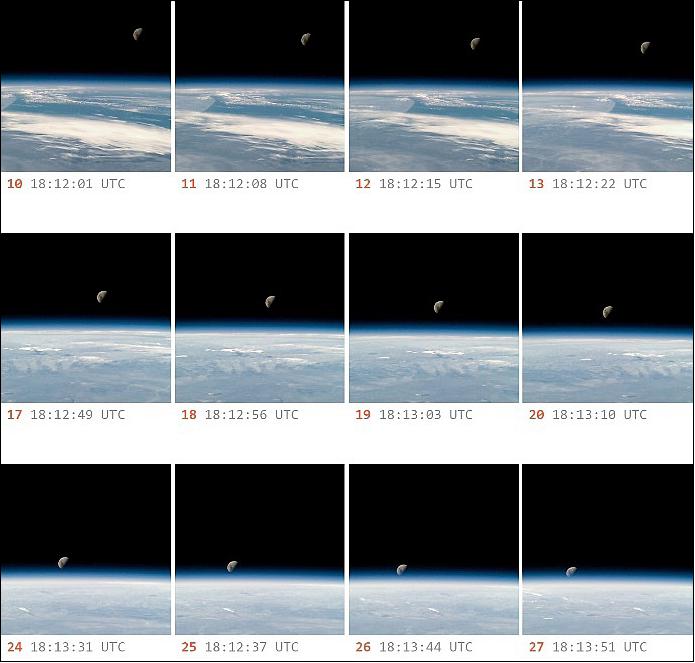
- As an example, for more complex operations planning, a set of 45 pictures of the Moon declining behind the Earth was recorded. A selection of these pictures is shown in Figure 8.
- Exploiting the aforementioned new capabilities, an entire orbit could be mapped continuously with nearly 1,000 connected images recorded in nadir pointing, a fraction of which are shown in Figure 9.

• On 19 September 2017, the operations team contacted TechnoSat during its 1000th orbit. The operations team was able to contact the spacecraft in 234 orbits with their own ground station (of the 1000 completed orbits) when the pass was over the station. More then 8.5 Mbyte could be downloaded during these contacts to monitor the spacecraft. First experiments were also conducted with the payloads. 18)
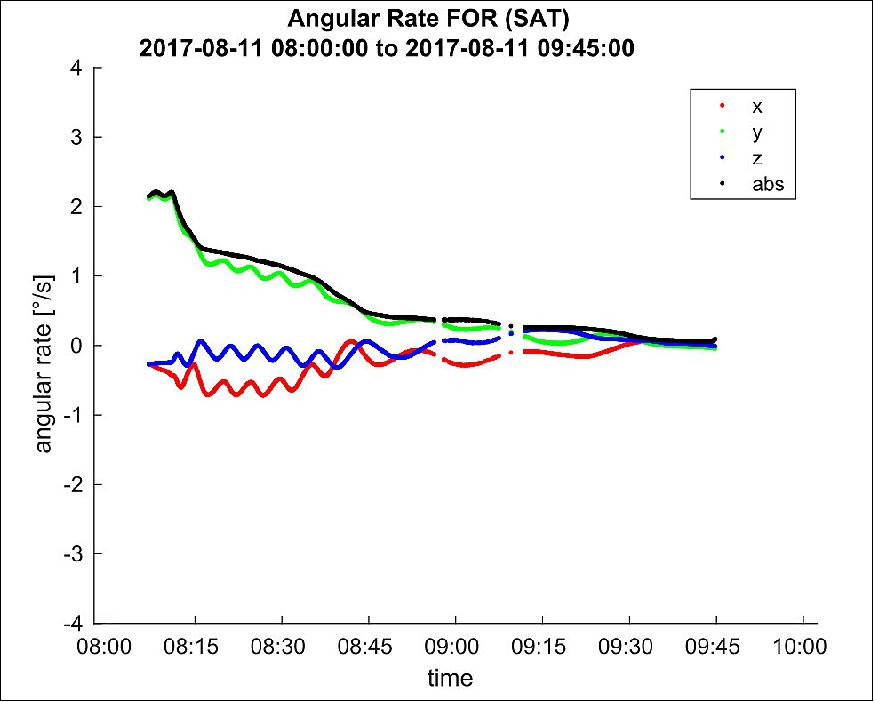
• August 28, 2017: TechnoSat's subsystems are currently being checked in the commissioning phase. The operations team is thrilled because all subsystems are functioning nominally. In addition, the detumbling maneuver was performed, reducing the spin rate of the microsatellite after deployment. The satellite is in good condition after the first weeks on orbit. 19)
• July 14, 2017: The first Technosat data were received 2 hours after launch at TU Berlin. 20)
Sensor Complement/Experiments
TechnoSat was designed to give developers the opportunity to test their components on orbit. Furthermore, the satellite shall demonstrate the capabilities of the TUBiX20 platform to support a challenging multi-payload mission. At the project's kick-off in 2013, six different payloads were selected for implementation on the TechnoSat spacecraft. The payloads initially chosen in the project are given in the following list:
7) Fluid dynamic actuator (FDA)
8) Star tracker STELLA
9) Camera
10) Separation system
11) Extendable boom system
12) Blackbody hatch
However, it became evident already in phase B of the project, that the development of certain payloads could not keep up with the tight schedule of the mission. Upon reaching phase D, the list of payloads did change significantly, as three payloads needed to be removed from the satellite, while four new payloads could be integrated as replacement. The following list comprises the final set of payloads of the TechnoSat mission:
1) Fluid dynamic actuator (FDA)
2) Star tracker STELLA
3) Camera
4) S-band transmitter HISPICO
5) Laser retroreflectors
6) Solar generator based impact detector (SOLID)
7) Reaction wheel system
As one can see, only three payloads that had been present at kick-off made it to the final configuration of the spacecraft. Several further payloads have been considered throughout the development of TechnoSat but were finally not selected. In the following a brief introduction of the payloads implemented on the spacecraft is given.
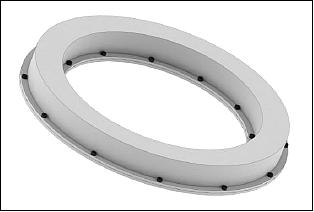
FDA (Fluid-Dynamic Actuator)
FDA is a novel attitude control actuator for small satellites, which is currently under development at TU Berlin. The system consists of a closed ring structure containing a liquid metal, an electromagnetic pump and the respective control electronics. A DC (Direct-Current) conduction pump uses the Lorentz body force to accelerate the liquid metal in the ring and hence to store angular momentum. For the verification within the TechnoSat mission Galinstan, an eutectic alloy of Gallium, Indium and Tin is used as liquid metal. Due to its simple design, which does not include any moving parts the FDA offers strong shock resistance and low abrasion. 21) 22)
While hall sensors can be used to measure the angular velocity of reaction wheels, they cannot be applied within the FDA. Consequently, there is no way to determine the current value of angular momentum directly. To overcome this obstacle, a MEMS gyroscope is used to measure the angular rate of the entire satellite. Furthermore, the reverse voltage of the DC conduction pump is measured, to determine the currently conserved angular momentum. As an additional advantage of the system, it is expected that the liquid metal provides nutation damping. For the TechnoSat mission, the FDA-A4 system was developed.
Angular momentum capacity, maximum torque | 25 x 10-3 Nms, 20 x 10-3 Nm |
Working fluid | Galinstan |
Total mass | 1.1 kg |
Nominal supply voltage, nominal power consumption | 5 V, 1 W |
Supply voltage for high torque mode, power consumption | 12 V, 6 W |
Fluid ring diameter | 300 mm |
Data interface | 2 x CAN 2.0 |
For the verification within the TechnoSat mission, a single axis system, that provides actuation capabilities around the satellite's roll axis, is applied. It will be the first application of a liquid metal-based attitude actuator on orbit and shall demonstrate the capabilities of this technology to be used as attitude control actuator for nanosatellites.
The primary objective of the experiment is the successful commissioning of the FDA. Secondary objectives include the demonstration of attitude maneuvers using the FDA as actuator and the demonstration of the nutation damping capabilities of the system. As a safety measure, the metal-filled ring structure is located inside an enclosing frame structure.
For angular momentum storage, the novel actuator utilizes Galinstan, a highly conductive eutectic liquid metal alloy. The non-toxic fluid is composed of gallium, indium and tin with an eutectic point of T= -19.5°C. As shown schematically in Figure 12, an EMP (Electromagnetic Pump) utilizes the Lorentz body force to propel the electrically conductive fluid inside the toroidal channel. For this, opposed rare-earth magnets create a magnetic field inside the pumping unit which is orthogonally traversed by a direct-current in between two copper electrodes. Thus, an electromagnetic force is exerted on the liquid metal and its movement is caused.
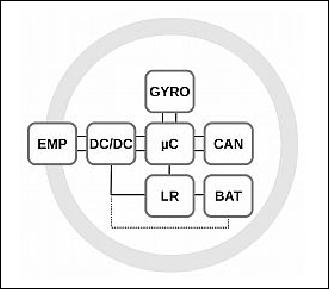
Due to the fluid's mass and its accelerated circular flow, torque is created. This leads to an angular momentum build-up over time and its exchange with the surrounding structure. The resulting angular rates of the system are picked up by an inertial sensor (GYRO) and fed to the control unit (µC) which regulates the direct current power supply (DC/DC) of the pump by using a LR (Linear Regulator) module and a feedback control algorithm.
Figure 12 gives an overview of the assembly's hardware components and their interconnection. The battery (BAT) is used only as a power source for ground testing purposes. In orbit, the FDA is attached to the satellite's 5 V and 12 V power rails. For communication with TechnoSat's OBC, the actuator employs the CAN protocol allowing rotational maneuvers, using specified angular rates or angles as set point variables.
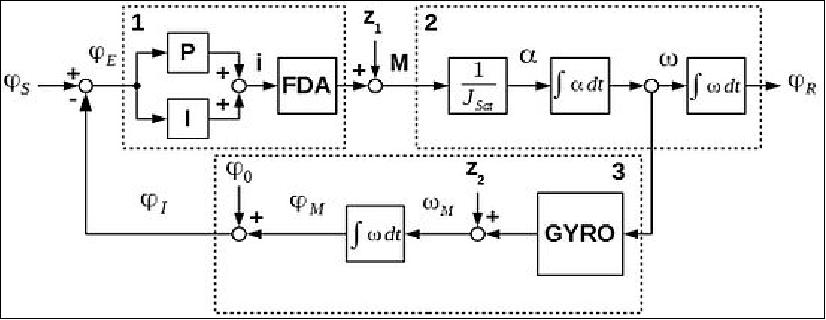
In Figure 13, the underlying control loop of the FDA is shown. It is composed of the controller block (1), the controlled system block (2), and the measurement block (3). In the depicted case, the angle φS is used as set point, the angle φR represents the control variable and φE embodies the control deviation. The symbol i denotes the PI-controlled direct-current which drives the electromagnetic pump. The produced torque M is then directly transmitted to the satellite structure.
Stella - Miniaturized Star Tracker
Stella is developed for CubeSat and nanosatellite applications; it conforms to all dimensional constrains commonly encountered in these satellite classes. Stella distinguishes itself from other star trackers through its small size, its low mass and its low power consumption. It uses innovative algorithms and modern hardware. Stella was developed at the University of Würzburg, Germany. 23)

The project phases of design, implementation, construction and qualification have been completed. The next step is the on-orbit verification of Stella within the TechnoSat mission. The objectives of the Stella FM (Flight Model) verification are to run several functional and performance test procedures on orbit. First, the FM will be operated without providing attitude information to the satellite bus. After successful verification, the star tracker can optionally be integrated into the attitude control loop of the satellite.
Stella was developed in two years, beginning with the requirement and concept phase. During the following design phase hardware and software were developed and finally qualified through a full qualification program according to ECSS, which includes thermal-vacuum, shock, vibration and radiation testing.
Accuracy | 0.01º pitch/yaw, 0.04º roll (3σ) |
FOV (Field of View) | 14.3º diagonal |
Power supply, power consumption | 3.3 V, 275 mW (average) |
Dimensions (including baffle) | 91 mm x 46 mm x 58 mm |
Mass (including baffle) | 167 g |
Operational temperature range | -25ºC to +55ºC |
Life time in LEO | 2 years (at reference altitude of 500 km) |
Data output | Quaternion in ICRF (International Celestial Reference Frame) |
Output sample rate | 4 Hz |
Main interface | 2 x CAN 2.0B, 2 x UART (Universal Asynchronous Receiver/Transmitter) |
Connector | Omnetics Connector Corporation |
S-Band Transmitter HISPICO
The S-band transmitter HISPICO is suitable for pico- and nanosatellites and offers a payload data rate of up to 1 Mbit/s. HISPICO was developed at TU Berlin in cooperation with the company IQ wireless GmbH of Berlin.
SOLID (Solar Generator Based Impact Detector)
DLR (German Aerospace Center) in Bremen developed the in-situ detection method SOLID for measurements of space debris (SD) and micrometeoroid (MM) objects with diameter larger than 70 µm. Four of the seventeen solar panels of TechnoSat are utilized for impact detection, controlled by an experiment computer designed at TU Berlin and software developed at the University of Würzburg.
SOLID uses solar panels for impact detection. Since solar panels provide large detection areas, this method allows the collection of large amounts of data. Such data enhances space debris and micrometeoroid population datasets and permits for related model validation. A ground verification of the detection method has been performed by HVI (Hypervelocity Impact) tests at Fraunhofer's EMI (Ernst Mach Institut), Freiburg, Germany. The objective of this investigation was to test the applicability of the developed method concerning in-situ detection of space debris and micrometeoroids. The achieved test results are in agreement with ESA developed damage equations and the functionality of the detector has clearly been demonstrated. 24) 25) 26)
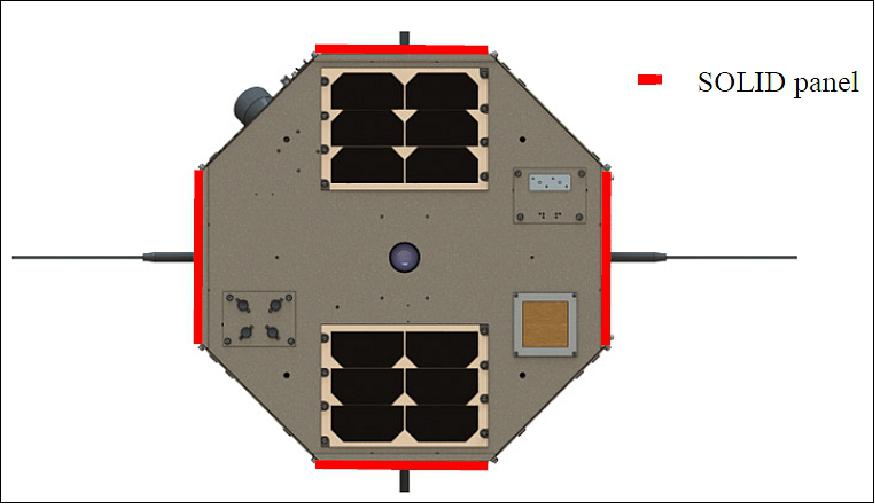
In contrast to previous impact detectors, SOLID is not an add-on component on the spacecraft. SOLID makes use of existing spacecraft subsystems and adopts them for impact detection purposes. TechnoSat is equipped with 17 equivalent solar panels. Each of the 17 panels is equipped with six solar cells, which are glued to the PCB (Printed Circuit Board) substrate. Those panels are connected in parallel to provide the spacecraft providing sufficient power for operations. Four of the seventeen solar panels were adapted for SD and MM impact detection. Figure 16 shows a top view of the TechnoSat spacecraft and the distribution of the four panels utilized for impact detection.
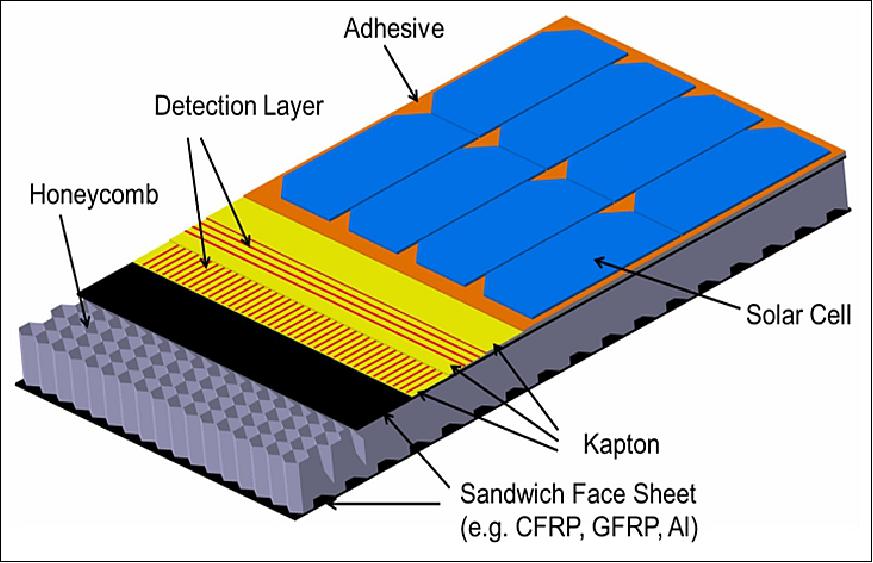
The functional principle of SOLID detection method has been described in Ref. 25). However, the principal adaptation of the detection method to a standard solar panel is summarized in the following. Figure 17 shows an example solar panel adapted for impact detection.
The SOLID concept modifies the insulation layer behind the solar cells of common solar panels. The modified panel integrates two layers of copper lines between the insulation layers (usually Kapton). The two copper layers are aligned in perpendicular directions, forming a detection grid. In case of an impact event, the colliding particle causes damage which can range in depth from the cover glass layer down to the detection layer and consequently cuts several copper lines in the grid. The number and position of the severed strips can be identified by the detection electronics and software. The diameter of the impactor that causes the damage can be estimated by utilizing ESA damage equations. 27)
The on orbit verification of the SOLID detection method is carried out in close cooperation between DLR, Bremen, Germany; TU Berlin (Technische Universität Berlin), Germany and University of Würzburg, Germany. The detection panels provided by DLR will be controlled by utilizing an experiment computer that replicates the board computer of the TechnoSat spacecraft developed by TU Berlin. The software for the SOLID experiment is developed and tested at the University of Würzburg. Figure 18 shows a schematic view of four SOLID panels and the corresponding SOLID board computer.
The panels (1, 2, 3 or 4) are controlled via I2C bus and two panels are connected to each of the two busses. The four panels will be analyzed continuously one after another. The data regarding registered impacts on the panels will be stored by the satellite's on-board computer for a subsequent downlink. Additionally, the current status of all panels can be requested as a real-time telemetry for immediate examination. The estimation of the impactor, that caused damage on the panel will be performed on ground by utilizing ESA developed damage equations.
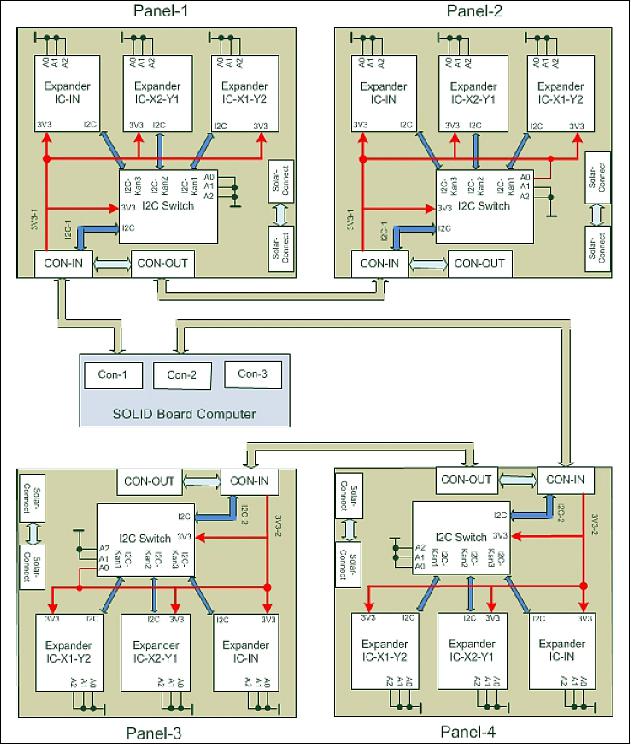
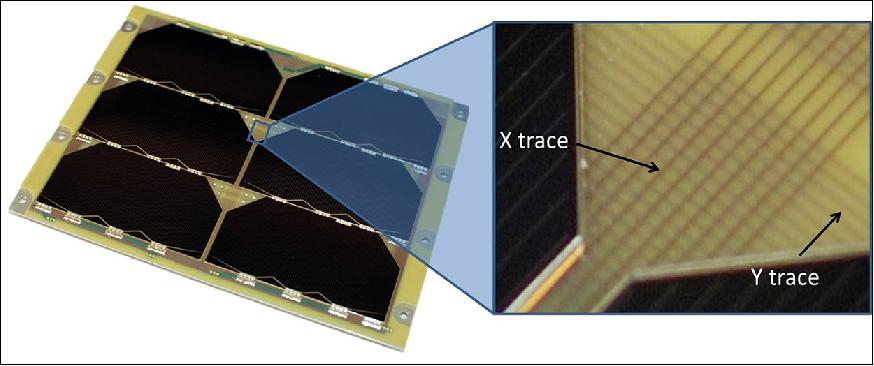
Figure 19 shows a qualification model of a TechnoSat solar panel equipped with SOLID detector for SD and MM impact detection (left) and an enlarged section view of the detection panel, where the X and Y traces behind the solar cells can be seen (right). The two detection layers for the axes X and Y, respectively, are integrated into the TechnoSat PCB design as shown in Figure17. The PCB is glued to the aluminum structure panel that is bolted to the primary structure of the TechnoSat spacecraft. On the top side of the PCB six solar cells are arranged.
RWA (Reaction Wheel Assembly)
The RWA is another payload that was developed at TU Berlin. The system consists of four reaction wheels in tetrahedron configuration.
Laser Retroreflectors
The retroreflectors were included in the mission to demonstrate the feasibility of laser ranging with 10 mm COTS reflectors on a nanosatellite.
References
1) Georg Kirchner, Ludwig Grunwaldt, Reinhard Neubert, Franz Koidl, Merlin Barschke, Zizung Yoon, Hauke Fiedler, Christine Hollenstein, " 18th International Workshop on Laser Ranging, Fujiyoshida, Japan, Nov. 11-15, 2013
2) Merlin F. Barschke, Walter Ballheimer, Lars Dornburg, Daniel Noack, Klaus Briess, Harry Adirim, Norbert A. Pilz, Hakan Kayal, Oleksii Balagurin, Harald Wojtkowiak, Christian Nitzschke, "TechnoSat - A Nanosatellite Mission for On-Orbit Technology Demonstration," Proceedings of the 27th AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-XI-3, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=2986&context=smallsat, URL of presentation: http://digitalcommons.usu.edu/smallsat/2013/all2013/121/
3) M. F. Barschke, F. Baumann, W. Ballheimer, K. Großekatthöfer, K. Briess, C. Nitzschke, "TUBiX20 The Novel Nanosatellite Bus of TU Berlin," 9th IAA Symposium on Small Satellites for Earth Observation, April 8-12, 2013, Berlin, Germany, paper: ISS-B9-0402, URL: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/archive9/Presentations/IAA-B9-0402.pdf
4) TechnoSat – Nanosatellite for the Demonstration and Verification of Novel Components and Subsystems," TU Berlin, URL: https://www.raumfahrttechnik.tu-berlin.de/menue/research/current_projects/technosat/parameter/en/
5) Merlin F. Barschke, Karsten Gordon, "Enabling Flexible Payload Management through Modularity," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B4.7.1
6) Merlin F. Barschke, Zizung Yoon, Klaus Briess, "TUBiX – The TU Berlin Innovative Next Generation Nanosatellite Platform," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.7A.4
7) Merlin F. Barschke, Karsten Gordon, " A Generic System Architecture for a Single-Failure Tolerant Nanosatellite Platform," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B4.6A
8) "Russia's Record ... Launches 72 Small Satellites," Satnews Daily, July 17, 2017, URL: http://www.satnews.com/story.php?number=2142058093
9) Stephen Clark, "Soyuz rocket lifts off with 73 satellites," Spaceflight Now, July 14, 2017, URL: https://spaceflightnow.com/2017/07/14/soyuz-rideshare-launch/
10) Jeff Foust, "Soyuz set to launch 72 smallsats," Space News, July 7, 2017, URL: http://spacenews.com/soyuz-set-to-launch-72-smallsats/
11) "Russia's Soyuz-2.1 Set to Launch 71 Smallsats Later This Week," Satnews Daily, July 10, 2017, URL: http://www.satnews.com/story.php?number=704505558
12) "Launch campaign for „Soyuz": maiden flight for our DCSM unit," Orbital Systems, May 25, 2017, URL: https://web.archive.org/web/20170606075556/http://www.orbitalsystems.de/launch-campaign-for-soyuz-maiden-flight-for-our-dcsm-unit/
13) Leena Pivovarova, "48 Doves to Launch on a Soyuz Rocket," July 7, 2017, URL: https://www.planet.com/pulse/48-doves-to-launch-on-a-soyuz-rocket/
14) https://web.archive.org/web/20200926204435/https://www.axelspace.com/en/solution_/wnisat1r/
15) "Russia will launch into orbit 72 small satellites per launch," Russian Aviation, 15 June 2017, URL: https://www.ruaviation.com/news/2017/6/15/8955/?h
16) Merlin F. Barschke, Julian Bartholomäus, Juan Maria Haces Crespo, Karsten Gordon, Clément Jonglez, Philip von Keiser, Danilo Költzsch, Julius Leglise, Marc Lehmann, Christian Meumann, Steffen Reinert, Sven Rotter, Mario Starke, Philipp Werner, Lars Zander, "TechnoSat - Results from the first 18 months of operations," Proceedings of the 12th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, 06-10 May 2019
17) Merlin F. Barschke, Karsten Gordon, Philip von Keiser, Marc Lehmann, Mario Starke, Philipp Werner, "Initial orbit results from the TUBiX20 platform," Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: AC-18.B4.6A.4, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/B4/6A/manuscripts/IAC-18,B4,6A,4,x45186.pdf
18) "TechnoSat's 1000th orbit," TU Berlin, 19 Sept. 2017, URL: http://www.raumfahrttechnik.tu-berlin.de/zielgruppen/aktuelles/news/parameter/en/
19) "TechnoSat: Test and commissioning," TU Berlin, 28 August 2017, URL: http://www.raumfahrttechnik.tu-berlin.de/zielgruppen/aktuelles/news/
20) "Successful first contact," TU Berlin, 14 July 2017, URL: http://www.raumfahrttechnik.tu-berlin.de/zielgruppen/aktuelles/news/parameter/en/
21) Daniel Noack, Jonathan Ludwig, Klaus Briess, "A Fluid-Dynamic Attitude Control Experiment for TechnoSat," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
22) Daniel Noack, Jonathan Ludwig, Klaus Briess, "An Angular Momentum Ring Storage Device for Small Satellites Based on a Liquid Metal Actuator," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14.C1.3.3
23) O. Balagurin, H. Kayal, H. Wojtkowiak, "Validation and qualification of a CMOS based miniature star tracker for small satellites", Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
24) Waldemar Bauer, Oliver Romberg, Merlin F. Barschke, "Space Environment Characterization by applying an innovative Debris Detector," Proceedings of the 16th AMOS (Advanced Maui Optical and Space Surveillance Technology Conference), Maui, Hawaii, USA, Sept. 15-18, 2015, URL: http://www.amostech.com/TechnicalPapers/2015/Orbital_Debris/Bauer.pdf
25) Waldemar Bauer, Oliver Romberg, Carsten Wiedemann, Gerhard Drolshagen, Peter Vörsmann, "Development of in-situ Space Debris Detector," Advances in Space Research, Volume 54, Issue 9, 1 November 2014, pp: 1858–1869, DOI: 10.1016/j.asr.2014.07.035. ISSN 0273-1177
26) W. Bauer, O. Romberg, A. Pissarskoi, C. Wiedemann, P. Vörsmann, "In Orbit Debris-Detection Based on Solar Panels," URL: http://elib.dlr.de/87899/1/IN%20ORBIT%20DEBRIS%20DETECTION
%20BASED%20ON%20SOLAR%20PANELS.pdf
27) W. Bauer, O. Romberg, and R. Putzar, "Experimental verification of an innovative debris detector," Acta Astronautica, Vol. 117, pp. 49–54, 2015
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement/Experiment References Back to top