XSS (Experimental Spacecraft System)
Non-EO
USAF
Quick facts
Overview
| Mission type | Non-EO |
| Agency | USAF |
| Launch date | 29 Jan 2003 |
XSS, XSS-10 & XSS-11 Missions
XSS is a microsatellite series of the US AFRL (Air Force Research Laboratory) with the objective to develop and demonstrate a satellite-oriented space logistics and servicing capability. The microsatellites are fully equipped with onboard avionics, propulsion and high-resolution cameras allowing a highly maneuverable microsatellite to perform close proximity inspection. Key technologies are:
• Lightweight propulsion system
• Guidance, navigation and control (GNC)
• Miniaturized communications system
• Primary lithium polymer batteries
• Integrated camera and star sensor
The specific mission was to demonstrate “the proximity operations with a resident space object (RSO), employing a semi-autonomous, maneuverable space vehicle communicating with command and control sites via a space/ground link.” The subsystems to be space qualified included a miniature satellite to ground link system (SGLS) transponder, a light weight integrated star tracker and visible imager, and flight software for proximity operations.
The program was originally planned for Shuttle launch, but NASA withdrew the ride in 1998 due to priorities for the International Space Station (ISS).
XSS-10
The first experimental mission, named XSS-10, is a joint effort among the following partners: AFRL, NASA, NRL and the Lawrence Livermore Laboratory. Demonstrate three basic areas: 1) 2) 3)
• Use of the carrier/microsatellite architecture, using the proven Spartan payload carrier
• Demonstration of a 31 kg semi-autonomous space system in a mission application for both Air Force and NASA inspection needs
• Control of an autonomous space system in close proximity to another space object via onboard and ground commands
Spacecraft
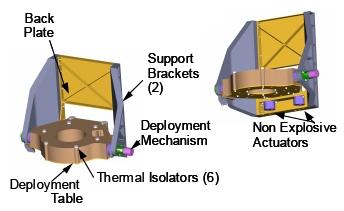
The spacecraft was designed and built by the Boeing Company (Boeing Rocketdyne) of Chicago as part of a combined government and industry team to integrate the microsatellite of ~ 31 kg of mass. The XSS-10 spacecraft consists of a primary interface platform, referred to as SPP (Sconce Payload Platform), supporting the satellite and its ejection system, integrated with the second stage guidance section of the Delta-2 (SPP was developed by Swales Aerospace of Beltsville, MD). A witness camera is mounted on the SPP to witness the ejection of the microsatellite. The other primary interface platform, known as SEP (Sconce Electronics Platform), supports the microsatellite EIU (Support Electronics Unit) and an antenna (mechanically interfaced with the Delta-2 guidance section at the opposite side of the SPP). The SEP objective is to function as a support platform for the microsatellite prior to its ejection. 4)
The ACS (Attitude Control System) of the microsatellite points the vehicle in the direction of the Delta-2 second stage while an imaging camera provides a digital image of the target to the DSP (Digital Signal Processor).
Mission battery: The XSS-10 mission was planning to use its own battery, but a better system approach used a standard Delta II HR40 nickel cadmium battery (with a nominal capability of 40 Ah) installed in the guidance section. Even though this was a standard Delta battery and common to Delta II missions, this was the first application of mounting the additional battery in the guidance section. Also, it was the first time this battery was called upon to meet a power profile of a 24-hour mission. The XSS-10 engineering team provided the load profile requirements to Delta for battery margin analysis. Results of the analysis showed a power margin of 36 percent.
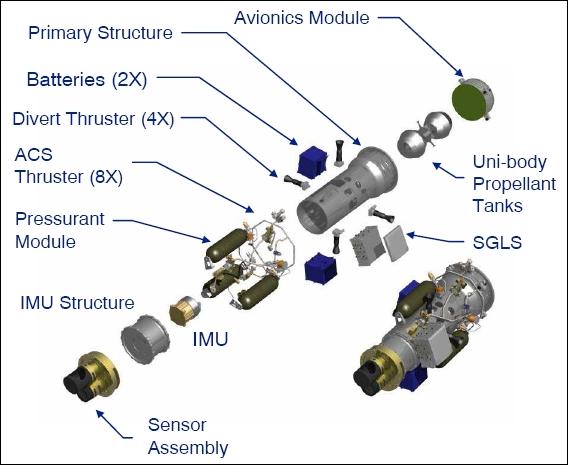
The microsatellite was a fully functional spacecraft capable of semi-autonomous operations. Its dry mass (including ballast) was 26.98 kg. It carried 2.58 kg of monomethylhydrazine (MMH) and nitrogen tetroxide (NTO) propellant and 0.70 kg of nitrogen pressurant. Thus the total wet weight of the microsatellite 30.25 kg. The spacecraft was 81.28 cm in length by 38.1 cm in diameter. Four lateral divert thrusters used the MMT/NTO bi-propellant to maneuver the microsatellite through the mission sequence. Eight ACS thrusters used the gaseous nitrogen propellant to ensure the microsatellite moved to the correct orientation for each mission event.
Launch
XSS-10 (also referred to as XSS-10A) was launched as a secondary payload to the GPS satellite (GPS-2R-8) on a Delta-2 launch vehicle (7925-9.5) from Cape Canaveral, FLA, on Jan. 29, 2003.
Orbit: circular orbit, altitude = 800 km, inclination = 39.8º.
RF communications: S-band carrier and use of a miniature SGLS (Space Ground Link Subsystem) system developed at NRL. SGLS consists of a receiver/demodulator transmitter baseband. The transponder accommodates the standard uplink/downlink SGLS function and is capable of receiving and retransmitting ranging signals, receiving, demodulating command signals, and transmitting telemetry signals. The SGLS transponder package includes a COMSEC (Communications Security) unit, consisting of an integrated equipment assembly capable of providing decryption and encryption security capabilities for satellite communications links.
The AFSCN (Air Force Satellite Control Network) provided ground stations for receiving Micro-Sat and witness camera telemetry and uplinking microsatellite commands. The SMC RDT&E Support Center (RSC) at Kirtland AFB served as the operations center for the mission. The AFRL Payload Test Center (PTC) housed the microsatellite flight engineers and was co-located with the RSC. Together the AFSCN, RSC, and PTC formed the XSS-10 mission operations architecture.
Experimental Scenario of the 24 Hour Mission
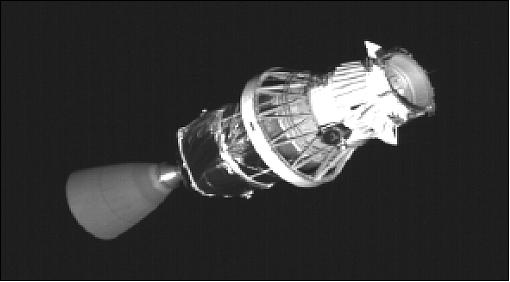
After the GPS satellite was released, the Delta-2 circularized its orbit at 800 km and raised its inclination until its liquid fuel was depleted. With the remaining cold gas attitude control system (ACS) and electrical power, the second stage spun up around its thrust axis to approximately 6 rpm.
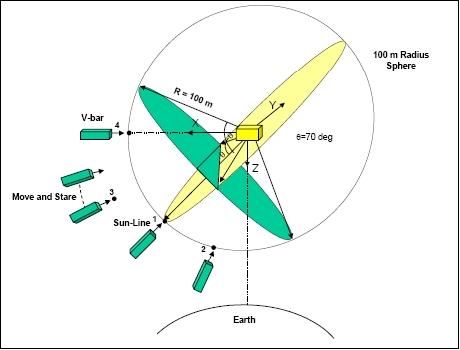
At this state, the XSS-10 spacecraft was ejected and its mission commenced with XSS-10 performing its pre-planned mission sequence of navigating around the Delta-2 second stage (the second stage served as RSO) that included maneuvering the microsatellite to four primary navigation points and then to an extra credit station.
The XSS-10 completed all mission operations in two contiguous ground site passes - BOSS and LION - lasting a total of about 23.5 minutes. At the first three primary mission stations XSS-10 maintained an approximate 100 m separation with the RSO. At the third navigation point the XSS-10 performed a move and stare operation. At the fourth, it planned to, and apparently did, perform a “v-bar” maneuver to close its separation with the RSO to about 50 m. A short telemetry dropout occurred when the ground station (BOSS) lost signal. The dropout lasted for three minutes, fifty-three seconds, causing the loss of video and health and status data from the XSS-10 for the fourth inspection operation. The AFSCN (LION) reestablished contact with the XSS-10 when it was 800 m from the Delta-2 on its way to the extra credit navigation point (Ref. 3).
The XSS-10 spacecraft conducted a number of other on orbit maneuvers for 24 hours before completing its mission.
• Autonomous navigation around the second stage at preplanned positions
• Image taking of the second stage (inspection sequence) live video was transmitted to ground stations
• Demonstration of a responsive checkout of the microsatellite and all of its subsystems, autonomous navigation on a preplanned course and a variety of algorithms and mission operations that are critical for future mission operations
• The microsatellite demonstrated some key technologies including a miniature communication systems, a lightweight propulsion system, advanced lithium polymer batteries, and autonomous operations through specially developed guidance and control software.
The XSS-10 operations were extremely successful and fulfilled all primary mission objectives. The flight experiment validated the design and operations of the microsatellite's autonomous operations algorithms, the integrated optical camera, and the star sensor design. The optical camera and star sensor provided good images of the rocket body. The XSS-10 program team also verified the critical station keeping, maneuvering control, and logic guidance and control software necessary for autonomous navigation.
From a post-flight mission analysis perspective, the most significant XSS-10 lesson that future programs can benefit from is that providing on-board flight data storage and an independent means of measuring system performance is essential to verifying successful completion of mission objectives.
Sensor and Experiment Complement
VCS (Visual Camera System)
VCS was developed at SAIC. The instrument consists of two CCD imagers (double head), each reading out through two 10-bit A/D converters producing the digital data stream. The optics on one camera is sized to take pictures, specifically of the Delta-2 second stage. The optics of the second camera was sized to take imagery of stars. The star tracker is looking through a folding mirror at the stars, with its line-of-sight perpendicular to the imager line-of-sight. VCS consists of an aluminum containing the printed circuit boards (PSB).

IMU (Inertial Measurement Unit)
The IMU is LN-200 of Litton Industries. IMU is a lightweight strap-down unit measuring the velocity and angle changes in a coordinate system fixed relative to its case. The instrument provides digital output of incremental velocity and incremental angle. The IMU uses a triad of fiber-optic gyroscopes and three silicon accelerometers. The accuracies are better than 1º/hour and 300 μg, respectively.
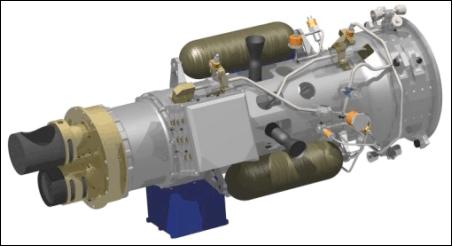
Propulsion System
Used for translation and attitude control of XSS-10. Liquid bipropellants (NTO and MMH) are used for divert thrusting. Gaseous nitrogen is used for propellant pressurization and attitude control. The propulsion system consists of the propellant module (unibody), pressurant module; divert thrusters, and ACS thrusters. The one-piece unibody, which contains the propellant tanks and integral divert manifolds, is mounted internally to a cylindrical aluminum-beryllium primary structure.

Mini-SGLS (Miniature Space-to-Ground Link Subsystem)
Mini-SGLS is of NRL, a small device in volume, mass and power consumption (10% level of conventional device), but high-performance in transmission capacity. The unit features an S-band transceiver. SGLS makes all military spacecraft interoperable within AFSCN (Air Force Satellite Control Network).
XSS-11 (Experimental Spacecraft System-11)
The XSS-11 technology demonstration mission is within the category of early OOS (On-Orbit Servicing) missions. The objectives of the XSS-11 mission are to demonstrate key elements of extended proximity operations using microsatellites/minisatellites. XSS-11 builds upon the technology demonstrated on the XSS-10 flight, but unlike the XSS-10 short-duration mission, the XSS-11 will remain in orbit for at least a year and conduct close-proximity operations to multiple targets of opportunity. This involves mainly inspection tasks (taking imagery of nearby objects) aimed at assisting operators on Earth in diagnosing problems with other satellites on orbit and in improving the ability to maintain systems already on orbit (demonstration of automated co-orbiting capabilities and imaging operations designed to help the Air Force learn how to diagnose problems in, and/or undertake servicing/refueling of, on-orbit assets).
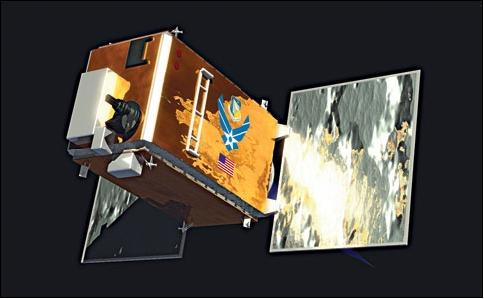
Spacecraft
In 2001, AFRL selected Lockheed-Martin Astronautics Company of Denver/Waterton, CO, to design, build, and flight demonstrate the XSS-11 (Experimental Satellite System-11) microsatellite for autonomous on-orbit operations. [The team includes Broad Reach Engineering, Phoenix, AZ; Octant Technologies, San Jose, CA.; Draper Laboratories, Cambridge, MA; and SAIC, La Jolla, CA].
The spacecraft structure is a box, 3-axis stabilized, containing a propellant tank and a number of subsystems. A radiation-hardened Power PC 750 processor (BAE Systems) is being used that serves as the master avionics OBC, enabling onboard autonomous operations and mission planning by the satellite itself (use of an autonomous onboard planner). S/C power is provided by triple-junction solar cells; a high energy density Li-ion battery of 28V/30 Ah capacity is used aboard XSS-11 in a compact package. An advanced propulsion subsystem (hot gas hydrazine for the main propulsive burns) enables a high degree of translational maneuverability for operationally responsive microsatellites. The spacecraft mass at launch is about 145 kg.
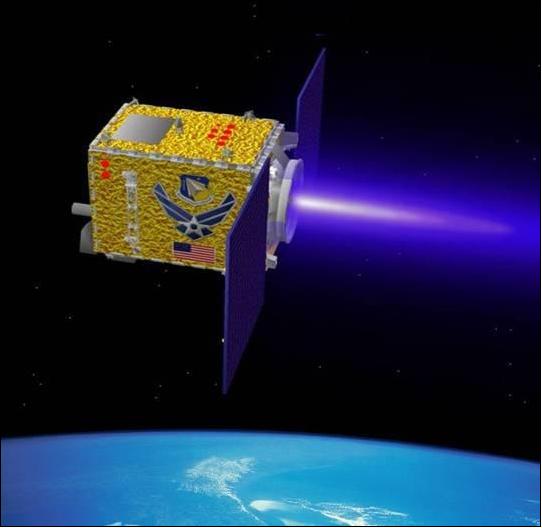
A great challenge was to create a spacecraft that can calculate how to align the gross orbital parameters. This involved onboard iterative trajectory simulations to optimize the timing and direction of up to a dozen rocket firings. Once in a close orbit, the spacecraft uses an advanced autonomous event planner, monitor, and a forward-thinking resource manager. The autonomous ability to plan future events, optimize timing and resources, and monitor and compensate for changes is a paradigm shift for spacecraft operations. Once the spacecraft gets within range of the active sensor, the same guidance and autonomy algorithms allow the spacecraft to perform many types of maneuvers around space objects to as close as 100 m. These include various station-keeping and translation motions as well as circumnavigations. The ability to quickly scoot around an object or to inject into a natural halo orbit is built into the software. 5)
Launch: A launch of XSS-11 took place on April 11, 2005 on a Minotaur launch vehicle of OSC (Orbital Sciences Corporation) from VAFB, CA.
Orbit: The XSS-11 is orbiting the Earth in the altitude range of 800-850 km (initial perigee of 839 km, apogee of 875 km), a near polar inclination of 98.8º is selected, period of 102 minutes.
XSS-11 will rendezvous with a pre-established list of US-owned inactive or dead research satellites or expended rocket bodies that can be reached from the orbit of XSS-11 (demonstration of the capability to autonomously plan and rendezvous with other approved space objects near XSS-11's orbit). Initially, the XSS-11 is to stay in front of or well behind the object from far away. After rendezvous the spacecraft is to circumnavigate the stage. The plan is to come within less than 1-2 km of the spent rocket body (execution of a series of maneuvers intended to demonstrate safe, controlled proximity operations around these objects).

Mission Status
The XSS-11 is operating nominally as of late 2006. Plans called for a deorbiting of the spacecraft in 2006 - but the spacecraft was still in orbit in February 2007.
The XSS-11 mission was originally planned to last between 12 and 18 months. It was intended to fly near and around other orbital objects (spent boosters and dead satellites owned by the U.S.) and inspect them. So far, no reports are available
• After launch (April 11, 2005), the spacecraft underwent an extended checkout period to verify all functions of components and subsystems.
• The spacecraft accomplished significant mission milestones by rendezvousing three to four times with the upper stage of the Minotaur launch vehicle at distances between 1.5 km and 500 m. So far, XSS-11 has already completed more than 75 natural motion circumnavigations of the expended rocket body. The fuel consumption and efficiency is good, and the spacecraft is expected to be operational for another year.
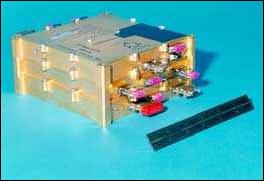
Experiment Complement
LPT (Low Power Transceiver)
LPT was developed by NASA and ITT Industries, Reston, VA. The primary communications method is via a miniature S-band link through the Air Force Satellite Control Network. The LPT is a compact, flexible device consisting of multiple PC-104 modules that can be configured to perform custom communications and navigation functions in terrestrial, airborne, and space applications; in addition, rLPT (radiation-tolerant LPT) can withstand radiation environments. The LPT performs signal-processing functions with reprogrammable FPGA and DSP devices. Additionally, the industry standard modules used in the LPT device allow it to host application-specific and COTS modules that contain processors and interfaces. The LPT is one-third the volume and mass of standard space ground link system transceivers and requires less power. This is accomplished through state-of-the-art, advanced microcircuitry. Not only does the device take less power, but it can quadruple the current standard data rate.
ITT also integrated two L-band, 12-channel GPS receivers into the unit (LPT) to provide position information to the satellite. The GPS receiver software is capable of being upgraded on orbit, which allows operators to fine-tune the software and take advantage of the upgraded GPS signal scheduled for implementation in the next few years. In fact, operators can reprogram the entire transceiver on orbit to accommodate changes in waveforms and data structures. This adaptability gives operators the ability to evolve performance after a system is launched and increases the interoperability of the system. 6)

IAU (Integrated Avionics Unit):
IAU was developed by Broad Reach Engineering of Tempe, AZ. The electronics are based on a 3U PCI backplane system that is half the size and weight of typical small satellite avionics (all boards conform to a 3U form factor and are housed in a single assembly). Miniaturizing subsystems is critical to packaging components in a very small volume. More importantly, this new avionics system will be the first flight test of the radiation hardened Power PC 750TM processor (Rad 750 of BAE Systems), developed by the Space Electronics Branch of AFRL in partnership with NASA's Space Science Enterprise. 7)
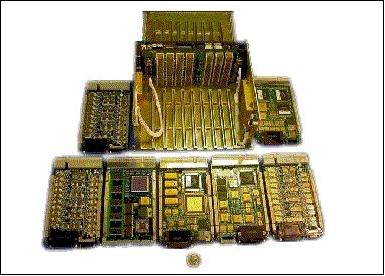
IAU has a size of 23cm x 25cm x 12cm, a mass of 5 kg, and a power consumption of 35 W typical and 47 W peak. Support of variable downlink data rates and provision of several protocols: CCSDS, SGLS and other formats.
RLS (Rendezvous Laser Vision)
RLS was developed by Optech Inc. of Toronto and MD Robotics of Brampton, Ontario, Canada. Note: MD Robotics is part of MDA (MacDonald Dettwiler and Associates Ltd.). RLS was formerly referred to as SSLS (Spaceborne Scanning Lidar System).
The objective is to demonstrate accurate detection, tracking and pose estimation of on-orbit targets for rendezvous and docking operations, and satellite inspection and servicing operations. The RLS platform is an integrated lidar system that allows centralized data, power and thermal management, while minimizing mass, power and volume. 8) 9) 10)
RLS, the active lidar system, emits a burst of light and reflects it off a two-dimensional, fast-scanning mirror. Measuring the time of flight and angle of the reflected beam provides the required information.
RLS is designed to meet the following long, medium and short range mission requirements:
- Detection of a small space resident object
- Object tracking
- Object inspection
• Detection: The RLS design provides a dense scan capability that will allow the detection of Resident Space Objects (RSOs) of 1 m2 in size at distances of up to 4 km. These objects are noncooperative and do not have retro reflectors or other types of optical aids.
• Object tracking: The RLS supports object tracking functions by providing real-time scan data telemetry and computed centroid data at the end of every scan frame. This telemetry, provided to the user at a 10 Hz rate, includes range, bearing and intensity data for each positive laser return. This data may be used as an input to a high rate tracking control function.
• Object inspection: RLS supports high-resolution inspection and imaging functions by providing user selectable scan window size and user selectable scan density capabilities. Imaging scan windows may vary from 0.1º x 0.1º to 10º x 10º. Telemetry of the scanned object may be used to generate a 3-D image of the scanned object with a resolution of 1 cm and 0.1º. RLS is capable of imaging under all lighting conditions.
RLS is designed to operate from small (microsatellite size) platforms with limited volume, mass and power resources. A modular dual unit design, connected via a cable harness, has been selected to best suit these constraints. RLS units were mass and power optimized throughout the development cycle to meet strict platform resource restrictions while delivering full required functionality. The RLS flight product (Figure 14) has the following maximum resource allocation:
- Mass: < 10 kg (including inter-unit cable harness)
- Power: < 75 W
- Volume: < 13 liter (combined volume)
- Range: 2 m to 3 km (1 cm resolution)
- Short range accuracy: 5 cm and 3.5 mrad
- Returns raw data or centroids at 10 Hz
- Data points collected at 8-10 kHz (laser PFR)
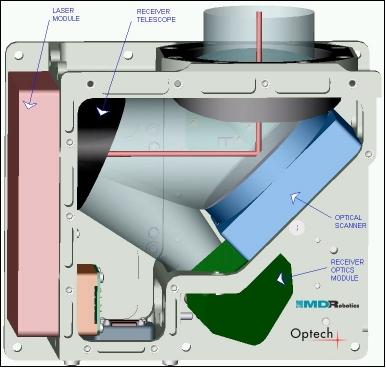
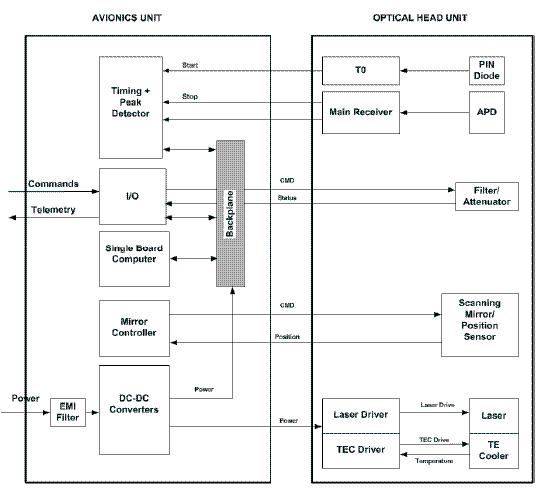
The RLS comprises two separate modules, an Optical Head Unit (OHU) and an Avionics Unit (AU), connected by a cable harness (Figures 14, 15 16). This dual module configuration provides end users with flexibility in mounting the RLS under tight volume constraints.

The OHU in turn consists of the scanning lidar's main electro-mechanical and electro-optical sub-systems. The electro-mechanical subsystem includes a high performance dual-axis scanning mirror. The electro-optical subsystem includes the laser transmitter and receiver. The laser transmitter includes a thermo-electric cooler (TEC) controlled laser and laser driver/controller as well as associated optical components. The laser receiver includes a high speed APD coupled into an amplifier/discriminator circuit along with a receiver telescope and other related optics. The T0 circuit detects the timing of the transmitted pulse while the receiver produces the timing of the return pulse. An operator selectable filter/attenuator is included to attenuate the return laser signal during close proximity scans. The optical head of the scanning lidar is shown in Figure 15.
The AU provides the OHU with power and commands required to support the OHU functions. The AU consists of three main sub-systems, power conditioning, signal processing, data acquisition and processing. It also includes the scanner mirror driver/controller circuit used to support the scanning function. The AU's modular design allows functionality changes with minimal or no impact to the mechanical and electrical design.
Maximum range | 3-5 km |
Range resolution | 10 mm |
Range accuracy at 50 m | 5 cm |
FOV (Field of View) | 20º x 20º |
Laser beam divergence | 500 µrad |
Data rate | 8-10 kpoints/s |
Instrument mass, power, volume | < 10 kg, < 70 W, < 13 L |
Laser (eye-safety) | Class 3B |
Data output | Range, bearing, centroid |
XSS-11 employs two approaches for relative position measurement - an active one (RLS) and a passive system one (Vision Camera).
VCS (Vision Camera System):
The passive approach for relative navigation uses a combined vision camera and star tracker built by SAIC. This is the VCS system flown on XSS-10. This highly compact device combines dual optical trains with a single integrated electronics package. The design approach not only saves mass, but also allows the two systems to swap roles to provide functional redundancy.
References
1) T. M. Davis, T. L. Baker, T. L. Belchak, W. R. Larsen, “”XSS-10 Microsatellite Flight Demonstration Program,” Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2003,
2) http://www.globalsecurity.org/space/systems/xss.htm
3) T. M. Davies, “XSS-10 Micro-Satellite Flight Demonstration,” GT-SSEC (Georgia Tech Space Systems Engineering Conference), Atlanta, GA, Nov. 8-10, 2005, URL: http://smartech.gatech.edu/bitstream/1853/8036/2/SSEC_SD3_doc.pdf
4) G. Budris, “Integrating Secondaries on Delta II - (Overview of XSS-10),” Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, March 6-13, 2004
5) http://www.kirtland.af.mil/shared/media/document/AFD-070404-108.pdf
6) D. Weigand, M. Harlacher, “A Radiation-Tolerant Low-Power Transceiver Design for Reconfigurable Communications and Navigation Applications,” ESTC (Earth Science Technology Conference), College Park, MD, June 24-26, 2003, URL: http://esto.nasa.gov/conferences/estc2003/papers/A6P5(Weigand).pdf
7) http://www.broadreachengineering.com/wp-content/uploads/2010/03/BRE_Brochure_2009.pdf
8) M. Nimelman, J. Tripp, G. Bailak, J. Bolger, “Spaceborne Scanning Lidar System (SSLS),” Proceedings of SPIE, `Spaceborne Sensors II', Edited by P. Tchoryk, B. Holz, Vol. 5798, pp. 73-82, 2005
9) J. Liadsky, “Recent Advancements in Commercial LIDAR Mapping and Imaging Systems,” NPS Lidar Workshop, May 24, 2007, URL: http://www.nps.edu/.../RecentAdvancements.pdf
10) R. Richards, J. Tripp, S. Pashin, D. King, J. Bolger, M. Nimelman, “Advances in Automous Orbital Rendezvous Technology: The XSS-11 Lidar Sensor,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates(eoportal@symbios.space).