ALMASat-1 (Alma Mater Satellite-1)
EO
Mission complete
SEM/EPS
University of Bologna
Quick facts
Overview
| Mission type | EO |
| Agency | University of Bologna |
| Mission status | Mission complete |
| Launch date | 14 Feb 2012 |
| End of life date | 14 Feb 2017 |
| Instruments | SEM/EPS |
| CEOS EO Handbook | See ALMASat-1 (Alma Mater Satellite-1) summary |
ALMASat-1 (Alma Mater Satellite-1)
ALMASat is a microsatellite project at the II School of Engineering at the University of Bologna, Forlì campus, Italy. The project started in 2003, involving students, researchers, and faculty of the Engineering School as well as cooperations with external institutions and industry. Basic requirements call for a low-cost and reliable mission with simple design goals. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14)
Background: ALMASpace S.R.l. is a new aerospace company (a so-called spin-off company), established in 2006 by a group of researchers of the II School of Engineering of the University of Bologna. ALMASpace represents the commercial development of a university project named ALMASat, started in 2003 in the Microsatellite Laboratory of the University of Bologna and aimed at the development of a multipurpose microsatellite platform. The overall goal of ALMASpace is the design and demonstration of affordable Earth observation missions based on the technological achievements. The near-term objective is to launch ALMASat-1 (2010/11) as initially conceived, to be followed some time later by an EO (Earth Observation) mission with an optical payload.
Spacecraft
The spacecraft uses a multi-purpose platform designed for educational and technological applications, with a modular open architecture suitable, with minor changes, for a wide range of different missions. The satellite has a mass of about 12 kg and consists of a cubical prism of 300 mm side length, with a modular tray structure made of six machined Al trays, (300 mm x 300 mm x 50 mm) kept together by eight stainless steel bars. Four Al/Al honeycomb lateral panels, which are the support structure of surface-mounted solar panels, complete the satellite structure. The architecture features a multi-purpose bus, to be used with minor changes for future missions, and capable of accommodating payloads with different volume and power requirements.
Many of the ALMASat-1 subsystems are assembled employing COTS (Commercial-off-the-Shelf) components, thus guaranteeing low cost missions and a rapid response.
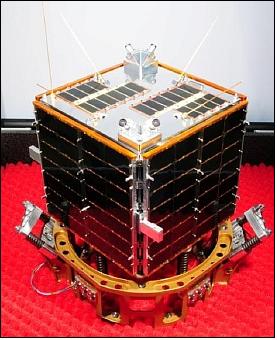
During the design phase of ALMASat-1, a new carbon fiber upper plate has been introduced and tested in order to correlate numerical and experimental results and confirm the technology improvement success. 15)
ADCS (Attitude Determination and Control Subsystem): ADCS provides a nadir-pointing three-axis stabilization to satisfy the pointing performance which could be required in the future by demanding payloads like remote sensing instrumentation.
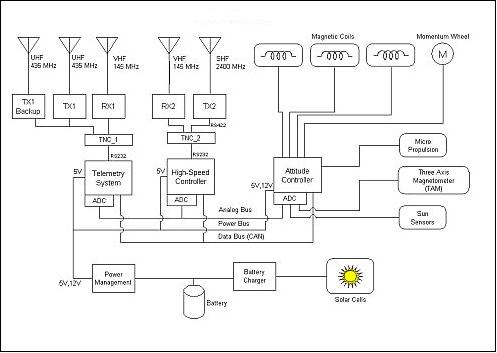
- Attitude sensing is provided with two redundant three-axis digital magnetometers, one manufactured by Honeywell and the second by Applied Physics Systems. Four experimental sun sensors, based on a PSD (Position Sensitive Detector) technology, complete the attitude determination hardware. The attitude controller board is based on the ATMEL ATMega162 microcontroller.
Each sun sensor utilizes a couple of Hamamatsu 2D pin-cushion type (improved Tetra-Lateral type) PSD. It has 4 electrodes placed at the angles of the square surface and it is characterized by a small dark current (in order to have a better SNR), fast response and low distortion. - To acquire and process the PSD signals a custom electronic architecture was developed (Figure 2), based on a 8 bit microcontroller which receives the PSD data throughout an A/D stage. The conditioning circuits, one for each PSD, is kept as close as possible to the detector to avoid electromagnetic interferences in the weak PSD signals, while the proper 12 bit ADC stage is mounted on the sun sensor mainboard. The microcontroller has also an internal CAN controller that is used to connect each sun sensor to the ALMASat-1 interface bus. The optical front end consists in a wide angle (130º FOV) CCTV (Closed Circuit Television) lens made up by 6 glass lens installed in a sealed metallic frame. 16)
The entire sun sensor system is contained in a small, shop machined, Aluminum alloy case fixed to the satellite top plate (Figure 3). A pointing accuracy of < 0.15º has been verified in calibration tests. In addition, the sun sensor assembly has also successfully completed the VEGA maiden flight qualification tests.


- Actuation is provided by three orthogonal magnetic coils, for attitude acquisition maneuvers and coarse attitude pointing and a pitch momentum wheel for fine pointing. In addition, a micropropulsion system (a technology payload) is providing the functions of pointing control, wheel desaturation, and small orbital maneuvers.
EPS (Electric Power Subsystem). ALMASat-1 has a battery consisting of 12 Li-ion cells (each with a capacity of 2 Ah) connected in three parallel series of four cells. The power is distributed to the spacecraft through two independent regulated bus systems, at 12 V and at 5 V, respectively.
RF communications: Use of AMSAT standards with VHF in the uplink at a data rate of 1200 baud, and a downlink in UHF (full duplex 1200 baud). In addition, an S-band downlink at 38.4 kbit/s, along with DDM (Direct Digital Modulation), is being used. The onboard antenna system is composed of a) a network of four monopoles (almost omni-directional) for the UHF downlink, b) a single monopole for the VHF uplink, and c) a quadrifilar helix antenna for the S-band downlink. A ground station has been installed in the Forlì laboratories of the University of Bologna since 2003, to operate the spacecraft.
Launch
ALMASat-1 was launched on Feb. 13, 2012 as a secondary payload on board the maiden flight of the new Vega launcher of ESA. The launch site was Kourou, French Guiana.
The primary scientific payload on the maiden flight was LARES (LAser RElativity Satellite) of ASI, Italy. In addition, ESA sponsored educational secondary payloads of seven European CubeSats, accommodated in three P-PODs (Picosatellite Orbital Deployers). 17) 18)
• Xatcobeo (a collaboration of the University of Vigo and INTA, Spain): a mission to demonstrate software-defined radio and solar panel deployment • Robusta (University of Montpellier 2, France): a mission to test and evaluate radiation effects (low dose rate) on bipolar transistor electronic components • e-st@r (Politecnico di Torino, Italy): demonstration of an active 3-axis Attitude Determination and Control system including an inertial measurement unit • Goliat (University of Bucharest, Romania): imaging of the Earth surface using a digital camera and in-situ measurement of radiation dose and micrometeoroid flux • PW-Sat (Warsaw University of Technology, Poland): a mission to test a deployable atmospheric drag augmentation device for de-orbiting CubeSats • MaSat-1 (Budapest University of Technology and Economics, Hungary): a mission to demonstrate various spacecraft avionics, including a power conditioning system, transceiver and on-board data handling. • UniCubeSat GG (Universitá di Roma ‘La Sapienza’, Italy): the main mission payload concerns the study of the gravity gradient (GG) enhanced by the presence of a deployable boom. |
Orbit: Elliptical orbit, altitude of 354 km x 1450 km, inclination = 69.5º, orbital period = 103 minutes (14 revolutions/day). About 75% of the orbit is in sunlight.
AD-SS (ADapter and Separation System)
ALMASat-1 is required to provide its own adapter and separation system for the Vega launch vehicle. The system in its final configuration is based on the typical 2-clamp separation method, frequently used for microsatellites and nanosatellites. The adapter consists of two mobile pads constraining two diagonally opposite corners of the satellite bottom plate and a large cylinder supporting the satellite and acting as interface with the launch vehicle. 20) 21)
The manufacturing and the verification phases of the ALMASat-1 AD-SS (ADapter and Separation System) have been successfully completed in early May 2009. The total mass of the spacecraft with adapter and separation system is 20.5 kg (13.56 kg of ALMASat-1 and 6.54 kg for AD-SS).
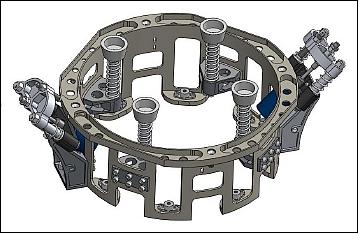
The original ALMASpace AD-SS has been sized and qualified for the launch according to the Vega requirements, therefore being hitherto the real benchmark for future missions onboard the Vega flights for satellites up to 35 kg. 22)
2012: In order to extend the AD-SS capabilities to larger spacecraft, ESA has undertaken an activity aimed at the development and qualification of a wider series of products, achieving the goal of supporting satellites missions up to 200 kg, thanks to an overall set of three different AD-SS models.
• AD-SS 35, directly derived from the ALMASat-1 AD-SS and verified for spacecraft mass up to 35 kg.
• AD-SS 150, improving the AD-SS 35 performance for spacecraft mass up to 150 kg, by means of enhanced retaining devices NEAs (Non-Explosive Actuators) for the two clamping systems.
• AD-SS 200, improving the retaining performance of the standard AD-SS 150 architecture for spacecraft mass up to 200 kg by means of two additional clamping systems.
The AD-SS 200 version represents the core of the current development for the VERTA-1 (Vega Research, Technology and Accompaniment-1) flight (Ref. 22).

The performance of the AD-SS 35 on the VV01 flight was not fully in line with the specifications because of a high tip rate of ALMASat-1 at separation. This anomalous behavior was later discovered to be very likely due to a combination of the low actuation current selected for the VV-01 launch, mainly due to the battery voltage having being optimized for the LARES separation system NEAs, and a thermal unbalance on the AD-SS which caused a differential delay in the clamps opening.
Maximum payload deployment mass of AD-SS 35 | 35 kg |
Separation velocity (@ max. P/L mass) | up to 2 m/s |
Voltage supply | 22 V |
Internal resistance | 2.4 Ohm @ 23ºC |
Current supply | 8.75 A (each NEA) |
Power supply | 385 W |
Actuation time | 20 ms @ 23ºC |
Expected scatter | ± 7 ms @ 23ºC |
Mission Status
• A few days after launch, an onboard failure occurred which eventually resulted in a contact loss with the spacecraft. The most likely explanation of the project is that there was a power outage, due to the operational range of the power board which resulted in the spacecraft's main power bus to decrease. The mission was, however, a full success for the project, as most subsystem could be qualified on orbit (Ref. 25).
• The ALMASat-1 team in collaboration with ALMASpace S.r.l. developed a simulation tool called THOR (Tool for sHort and medium ORbital propagation) to carry out an analysis of payloads separation & orbit propagation for investigating possible payload collisions and pollution-contaminations. The propagation part of the simulation tool has been validated by using an ESA/ESOC space debris office propagation tool based on the propagator of the ODIN (Orbit Determination via Improved Normal Equations) software package. 24)
• AlmaSat-1 deployed nominally into orbit. First signals of the spacecraft were received on February 14, 2012 by the global AMSAT community as well as by the AlmaSat-1 project at the University of Bologna. 25)
Sensor Complement
MPS (Micropropulsion System)
MPS is a small cold-gas propulsion system to function as a demonstration payload. The objective of MPS is to perform three different types of experiments:
- Three-axis stabilization and target attitude maintenance
- Momentum wheel desaturation and pitch axis fine pointing
- A small orbital maneuver is planned, aimed at raising the spacecraft altitude (semi major axis) will make use of two thrusters firing continuously until the gas runs out.
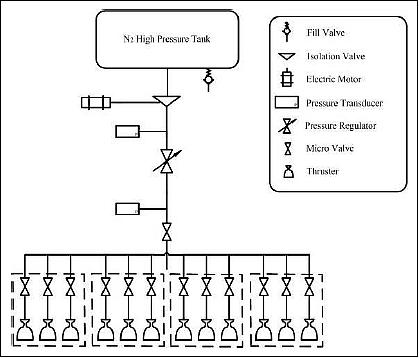
The complete system consists of a high-pressure tank, a fill valve, an isolation valve with electric motor required to prevent gas leakage before its first usage, a pressure regulator that set the outlet pressure to the microthrusters working pressure, fourteen micro valves for gas dispense, twelve microthrusters assembled in a pod configuration (four groups of three thrusters and three micro valves) and two pressure transducers for monitoring the pressure value upstream and downstream the pressure regulator (Figures 7 and 8).
MPS features a De Laval nozzle which accelerates the fluid at supersonic speed from a plenum (tank), through a micro nozzle with the following parameters: a throat diameter of 36 µm, an exit diameter of 136 µm, a supersonic expansion angle of 20º, a mass flow rate of 1.2 mg/s, a constant nozzle height of 31 µm, an exit Mach number of 2.6, and an area ratio of 4.7. MPS has been designed and built by the University of Bologna in collaboration with Carlo Gavazzi Space and the CNR-IMM (Istituto per la Microelettronica e i Microsistemi), Bologna. 26)
MPS provides a thrust of ~0.75 mN using a molecular nitrogen monopropellant operating at a stagnation pressure of 0.6 MPa (MEOP pressure). Under these conditions, the specific impulse (Isp) of the thrusters is 65 s (or ~640 m/s). The nozzle geometry has been designed by developing a quasi 1-D compressible-friction-flow model software code that optimizes the specific impulse and the divergent portion of the nozzle using as an input the desired thrust, the temperature of the gas and plenum pressure.
Twelve microthrusters, grouped in four clusters of three, provide a torque around the three body axes to guarantee the full three-axis control of the spacecraft around its center of mass. This is performed by means of a bang-bang control law making use of a non-linear PD feedback. Three different sets of experiments will be executed:

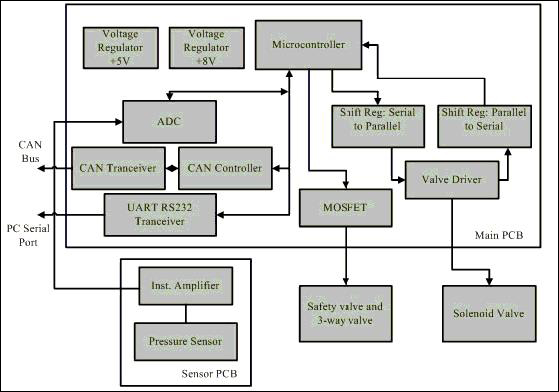
A PCB (Printed Circuit Board) is being used to control the MPS. Three functions are needed:
- Open-close control of the microthrusters
- Implementation of the control algorithms optimized for the mission, and to account for the data received from the other spacecraft subsystems
- To verify the proper working of all parts of the micropropulsion system; detection and repair (when possible) of the possible failures that could occur during the mission.
MPS is comprised of high pressure tank (Al alloy), containing the propellant gas required to perform attitude control maneuvers and the orbit transfer function. A Matlab® code was developed to optimize the propellant mass budget, resulting in the storage of 20 grams of molecular nitrogen.
The total mass of the MPS device is < 1.5 kg, including twelve silicon wafer microthrusters, fifteen microthrusters control valves, tanks, pressure regulator, and propellant. The power consumption for a single thruster open-close cycle is about 1.5 W.
MEOP (Maximum Expected Operating Pressure) of tank | GN2 at 3.2 MPa (MEOP pressure) @ 293 K |
Thrust | 0.75 mN @ 13,800 N/m2 |
Tank volume | 460 cm3 |
Total impulse | 15 Ns |
Impulse bit | 0.75 mNs |
Dimensions | 300 mm x 300 mm x 50 mm |
Overall system mass | < 1.5 kg |
All MPS components have been analyzed and tested in detail, according to the CSG (Centre Spatial Guyanais) Safety Regulations. Several tests on the components, in particular leakage measurements estimation, were performed in order to guarantee the in orbit experiments execution.

References
1) http://www.almasat.unibo.it/
2) A. Graziani, N. Melega, P. Tortora, “A Low-Cost Microsatellite Platform for Multispectral Earth Observation,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
3) P. Tortora, E. Troiani, G. Piraccini, M. Tappi, F. Persiani, “Low-Cost Development of a Multi-Purpose Microsatellite Platform,” Proceedings of the XVII A.I.D.A.A. Congress, Sept. 15-19, 2003, Rome, Italy
4) E. Troiani, P. Tortora, G. Piraccini, M. Tappi, “Finite Element Modelling for Static and Dynamic Analyses of a Low-Cost Microsatellite Platform,” Paper IAC-04-I.P.05, 55th International Astronautical Congress, Oct. 4-8, 2004, Vancouver, Canada
5) P. Tortora, E. Troiani, “The Microsatellite Research Program at Università di Bologna,” Acta Astronautica, Vol. 56, No 7, 2005, pp. 641-704
6) P. Tortora, F. Antonini, G. Vezzali “Design And Testing of Charging Control Circuits for Commercial Li-Ion Batteries with Application to Spacecraft Power Storage,” Proceedings of the Seventh European Space Power Conference, Stresa, Italy, May 9-13, 2005 (ESA SP-589)
7) P. Tortora, A. Graziani, A. Tambini , C. Vernocchi, M. Rossetto, “Low-Cost Assembly Technologies for Microsatellite Solar Panels,” Proceedings of the 3rd International Energy Conversion Engineering Conference, Aug. 15-18,, 2005, San Francisco, USA
8) P. Tortora, C. Bianchi, F. Antonini, “Development and testing of a high accuracy sun-sensor,“ Proceedings of the XVIII A.I.D.A.A. Congress, Sept. 19-22, 2005, Volterra, Italy
9) P. Tortora, M. Rossetto, A. Graziani, A. Tambini , C. Vernocchi, “Low-cost development of microsatellite solar panels,“ Proceedings of the XVIII A.I.D.A.A. Congress, Sept. 19-22, 2005, Volterra, Italy
10) F. Giulietti, P. Tortora, “Desaturation Control laws for a Small Satellite,” Proceedings of the XVIII A.I.D.A.A. Congress, Sept. 19-22, 2005, Volterra, Italy
11) R. Cocomazzi, A. Avanzi, D. Modenini, P. Tortora, “Systems Design and Performance of Cold Gas Microthruster for Microsatellite Attitude Control,” AIAA-2006-4629, 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Sacramento, California, July 9-12, 2006
12) P. Tortora, F. Giulietti, A. Corbelli, V. Fabbri, “ALMASat Attitude Control Hardware-in-the-Loop simulations,” 57th International Astronautical Congress, Valencia, Spain,, Oct. 2-6, 2006
13) E. Troiani, D. Bruzzi, S. Gianotti, P. Tortora, “ALMASat Microsatellite Structural Analysis: Finite Elements Techniques, Vibration Tests and Results Correlation,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.6.09
14) A. Avanzi, P. Tortora, “Design and development of a GNSS spaceborne receiver for Earth Observation satellites orbit determination,” 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011, paper: IAA-B8-1103, URL: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/archiv8/Presentations/IAA-B8-1103-1.pdf
15) Davide Bruzzi, Alessandro Tambini, Alessandro Tellini, Enrico Troiani, “Improvements in materials technologies for low-cost microsatellite structures: from aluminum to carbon fiber,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B4.6.A8
16) Claudio Bianchi, Nicola Melega, Paolo Tortora, “Design, Development and Qualification of a Low-Mass, Low-Power Digital Sun Sensor,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
17) “ESA’s new Vega launcher scores success on maiden flight,” ESA, Feb. 13, 2012, URL: http://www.esa.int/SPECIALS/Vega/SEMJ8LYXHYG_0.html
18) “Vega VV01 launch campaign,” ESA, URL: http://www.esa.int/SPECIALS/Vega/SEMY64BX9WG_mg_1.html
19) “ESA’s CubeSats near the end of a five year journey,” ESA, Jan. 26, 2012, URL: http://www.esa.int/SPECIALS/Education/SEMV4RH8RXG_0.html
20) Davide Bruzzi, Alberto Corbelli, Paolo Tortora, “Design, Assembly and Verification of the ALMASat-1 Separation System,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
21) Davide Bruzzi, Alberto Corbelli, Paolo Tortora, “Design and verification of an optimized separation system for microsatellites: the ALMASat-1 case study,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.5.4
22) Alberto Corbelli, Davide Bruzzi, Paolo Tortora, Marco Bocciarelli, Benoit Geffroy, “The Adapter and Separation Systems Series for the Vega Launch Vehicle,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
23) Davide Bruzzi, Alberto Corbelli, Paolo Tortora, Marco Bocciarelli, Benoit Geffroy, “The adapter and separation systems series for the VEGA launch vehicle,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B4.5.10
24) Valentino Fabbri, Paolo Tortora, “Payload Orbital Separation and Pollution Analysis Tool for Cluster Launches of Small Satellites,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
25) Information provided by Paolo Tortora of the University of Bologna, Italy.
26) Roberto Cocomazzi, Alessandro Avanzi, Valentino Fabbri, Paolo Tortora, " ALMASat-1 Cold Gas Micropropulsion System: Final Layout, Qualification and Functional Tests," Proceedings of Small Satellite Systems and Services (4S Symposium), Funchal, Madeira, Portugal, May 31-June 4, 2010
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).