ALOS-3 (Advanced Land Observing Satellite-3)
EO
JAXA
Atmosphere
Ocean
Launched on 7 March 2023, Advanced Land Observing Satellite-3 (ALOS-3), also known as Daichi-3, was a follow-on mission from the ALOS/Daichi program developed by the Japan Aerospace Exploration Agency (JAXA). ALOS-3 complemented observations of its predecessor, ALOS-2, providing supporting imagery for applications in environmental and disaster monitoring, the surveying of crops and coastal fishing conditions, and the continuous updating of existing geographical data archives. The launcher failed shortly after launch, and the payload did not make it into orbit.
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA |
| Mission status | Mission complete |
| Launch date | 07 Mar 2023 |
| End of life date | 07 Mar 2023 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Ocean colour/biology, Multi-purpose imagery (ocean), Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Sea ice cover, edge and thickness, Snow cover, edge and depth |
| Measurement detailed | Cloud top height, Ocean imagery and water leaving spectral radiance, Cloud cover, Color dissolved organic matter (CDOM), Cloud imagery, Land surface imagery, Vegetation type, Fire fractional cover, Earth surface albedo, Leaf Area Index (LAI), Land cover, Sea-ice cover, Snow cover, Normalized Differential Vegetation Index (NDVI) |
| Instruments | OPS (Pan, Multi) |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See ALOS-3 (Advanced Land Observing Satellite-3) summary |
Summary
Mission Capabilities
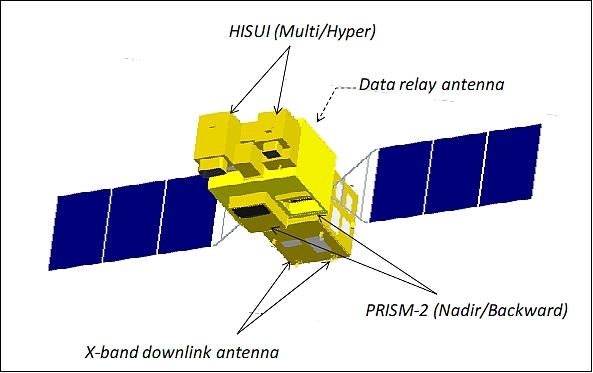
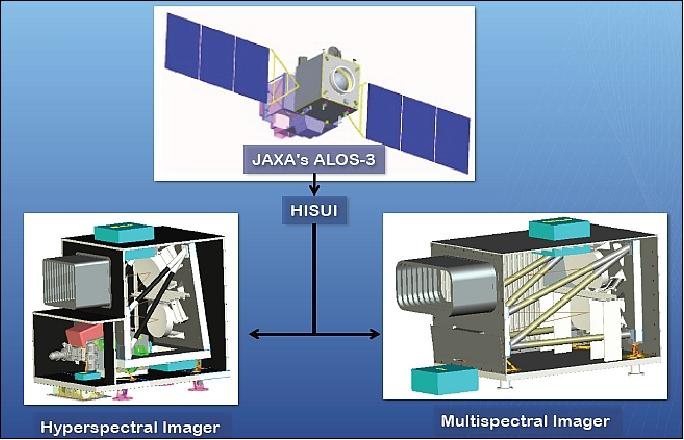
ALOS-3 carried two instruments, the Panchromatic Remote-sensing Instrument for Stereo Mapping (PRISM-2) and the Hyperspectral Imager Suite (HISUI).
- PRISM-2 is a stereo high-resolution instrument that utilises a pushbroom scanning technique, with the objective of providing high-resolution, wide-swath imagery with high geolocation accuracy.
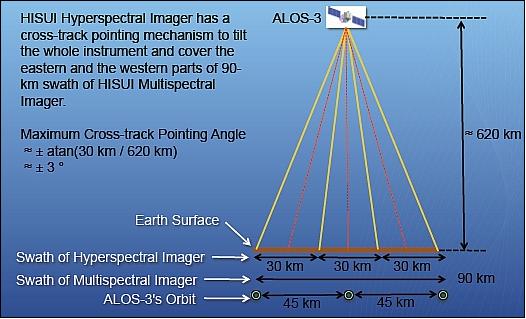
- HISUI is a hyperspectral and multispectral pushbroom imager, consisting of two elements, a multispectral sensor (MSS) and a hyperspectral sensor (HSS), with applications in global resource and energy analysis of oil, gas and metal reserves, as well as other applications such as environmental monitoring, agriculture, and forestry.
Performance Specifications
PRISM-2 is a two-line imager, with the simultaneous nadir and backward looking capability. It has a GSD (Ground Sample Distance) of 0.8 m at nadir, and 1.25 m backwards looking. It also has a swath width of 50 km, and a spectral range of 0.52 - 0.77 µm, covering visible to near-infrared (VIS-NIR) spectral regions. HISUI has a spectral range of 0.4 - 2.5 µm, between visible to shortwave infrared (VIS-SWIR) spectral regions. HISUI’s MSS has a GSD of 5 m, in the VNIR (visible and near-infrared) spectral region, with swath width of 90 km, while HSS has a GSD of 30 m over spectral regions NIR and SWIR, and a swath width of 30 km.
ALOS-3 operated in a sun-synchronous orbit of altitude 618 km and inclination 97.9°, with LTDN (Local Time on Descending Node) at 1030 hours, mirroring the LTDN of ALOS-1 to enhance data continuity. It featured a period of 98 minutes with a repeat cycle of 35 days.
Space and Hardware Components
ALOS-3 utilised an identical satellite bus to ALOS-2, provided by Mitsubishi Electric Company, with a launch mass of 2120 kg and dimensions 9.9 m x 16.6 m x 3.7 m. ALSO-3 used a system consisting of an X-band downlink and ISL (Intersatellite Link), facilitated by the newly developed XMOD (Multi-Mode High-Speed Modulator), to transmit mission source data at a data rate of 800 Mbit/s. On-board storage capacity was greater than 200 Gbit, with a maximum data volume of 1400 Gbit per day.
ALOS-3 (Advanced Land Observing Satellite-3; optical mission)
ALOS-3 was the follow-on JAXA optical satellite mission of ALOS/Daichi (launch Jan. 24, 2006), to complement the SAR services of the ALOS-2 mission (launch planned for 2013).
ALOS-3 carried an optical sensor complement to succeed PRISM (Panchromatic Remote-sensing Instrument for Stereo Mapping) and AVNIR-2 (Advanced Visible and Near-Infrared Radiometer-2) aboard ALOS.
The goal of the ALOS-3 mission was to provide operational support services in the following areas:
1) Disaster monitoring of stricken regions is one of the most important requirements of the post-ALOS program.
2) Continuous updating of data archives related to national geographical information, including topographic maps, land use, and vegetation
3) Survey of crops and coastal fishing conditions
4) Environmental monitoring, including illegal dumping of industrial wastes.
The basic requirements included high resolution, wide swath, prompt observation and information delivery after a disaster. To meet their requirements, JAXA carried the conceptual design of the post-ALOS satellite system, including a constellation of optical satellites and radar satellites. 1) 2) 3) 4)
The main requirements were:
- Provision of high-resolution imagery with a GSD of < 1 m on a swath of 50 km
- Provide pan-sharpen imagery with simultaneous acquisition of panchromatic band (Pan) images and four-color band (MS) images
- Acquire stereo imagery from different view angles
- Enable the capability of image acquisition of any point in a wide area with pointing to achieve timely monitoring if a disaster occurs.
The sensor complement of ALOS-3 was going to feature more enhanced capabilities than those provided by the PRISM and AVNIR-2 instruments.
The mission concept of ALOS-3 called for the following services:
• ALOS-3 supplying high-resolution imagery of 0.8 m and a wide swath of 50 km to contribute to archives of satellite image maps all over the world. ALOS-3 would have produced pan-sharpened images with simultaneous acquisition of panchromatic images and four-band multi-spectral images.
• ALOS-3 performing simultaneous observations of ground surfaces from different angles using the nadir-looking and backward-looking panchromatic imager in order to produce precise DSMs (Digital Surface Models) by stereo pair images to be used in many fields.
• ALOS-3 enabling image acquisition of any point in a wide area by satellite body-pointing to achieve timely monitoring when a disaster occurs.
Note: The ALOS (Daichi) spacecraft was retired on May 12, 2011. The JAXA recovery team had been trying to communicate with ALOS for about three weeks after it developed a power generation anomaly.
Spacecraft
A proper description of the spacecraft will be provided when available.
The event monitoring requirement for quick disaster response services called for an agile spacecraft with a body-pointing capability of ±60º into any direction using reaction wheels. Hence, such technologies as a highly stable spacecraft control function and a precise image location system were goin to be inherited from ALOS.
The design of the ALOS-3 bus would have adopted the design of the ALOS-2 bus in almost all aspects. There were some differences between the ALOS-2 bus and the ALOS-3 bus; for example, the pointing capability and the amount of data storage were different.
RF communications:
The large volume of the payload source data required a high-capacity onboard storage system as well as a high-quality irreversible (lossy) compression technique.
ALOS-3 used an X-band downlink and an ISL (Intersatellite Link) system to handle the several Gbit/s of mission source data. The data rate was 800 Mbit/s with a modulation scheme of 16 QAM (Quadrature Amplitude Modulation). Use of the newly developed XMOD (Multi-mode High-Speed Modulator) as described in ALOS-2. The onboard storage capacity was > 200 GByte. The maximum data volume was 1440 GByte/day.
Launch
ALOS-3 launched onboard the maiden flight of the H3 rocket on 7 March 2023. The payload did not make it to orbit as the second stage engine failed to ignite, and JAXA sent a destruct command to the rocket. The rocket and payload were destroyed.
Orbit:
Sun-synchronous orbit, altitude = 618 km, inclination = 97.9º, LTDN (Local Time on Descending Node) at 10:30 hours ±15 minutes. The nominal repeat cycle was 60 days.
Mission Status
- March 7, 2023: ALOS-3 launched on board the first H3 Launch Vehicle (H3 TF1) at 10:37:55 (JST) from the JAXA Tanegashima Space Center. The second stage engine failed to ignite and the spacecraft was unable to enter the Earth’s orbit. At 10:51:50 (JST), a destruct command was transmitted to H3. A special task force headed by JAXA President Yamakawa, started investigations to find out the cause. 22)
- February 16, 2023: The flight launch attempt for the H3 rocket from Japan's Tanegashima Space Center was aborted which was supposed to send the Earth observing satellite ALOS-3, to orbit.
- The countdown to T-0, which occurred at 8:37 p.m. EST (0137 GMT and 10:37 a.m. Japan Standard Time on Feb. 17), two LE-9 engines that power the vehicle's core stage ignited, but its two solid rocket boosters SRB-3s, did not; "an anomaly was found in the first-stage system, and ignition signals for the SRB-3s were not sent," JAXA officials wrote in a follow up update. The nature and cause of that anomaly were not specified; further investigation will be made to find the cause of the fault. 23)
Sensor Complement
The sensor complement comprised the optical instruments PRISM-2 and HISUI, featuring panchromatic and multispectral imaging capability as well as hyperspectral imaging capability. The orbit was set such that PRISM-2 could observe the entire surface of the Earth in 50 km swaths without spacecraft body-pointing. For mission continuity, the local sun time would have been at 10:30 hours which was the same as that of ALOS. 5)
PRISM-2 (Panchromatic Remote-sensing Instrument for Stereo Mapping-2)
PRISM-2 provided high-resolution, wide-swath imagery with high geolocation accuracy, as well as precise DSMs (Digital Surface Models) using stereo pair images acquired by two telescopes, one nadir-looking and one backwards-looking. To meet the mission requirements, some observation capabilities needed to be upgraded from those of PRISM onboard ALOS. Table 1 compares the observation capabilities of PRISM and PRISM-2. 6) 7)
Parameter | ALOS/PRISM | ALOS-3/PRISM-2 |
GSD (Ground Sample Distance) | 2.5 m | 0.8 m |
Swath width | 35 km / 70 km | 50 km |
SNR | >70 | >200 |
Data quantization | 8 bit | 11 bit |
Spacecraft pointing capability | ±1.5º (in cross-track) | ±60º (cone, max) |
Data downlink | 277.52 Mbit/s (Ka-band) | 800 Mbit/s (X- and Ka-band) |
Geolocation accuracy | 6.1 m (rms) | Better than PRISM |
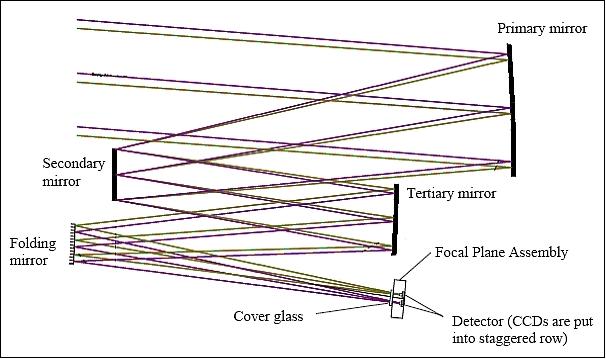
PRISM-2 was a two-line pushbroom-type stereo high-resolution instrument (nadir-looking and backward-looking of PRISM heritage on Daichi), featuring a telescope with a wide FOV (Field of View) and a large format FPA (Focal Plane Assembly) detector to realize a swath width of 50 km at a GSD (Ground Sample Distance) of 0.8 m on a swath of 50 km. An off-axis TMA (Three Mirror Anastigmat) design of the telescope was employed.
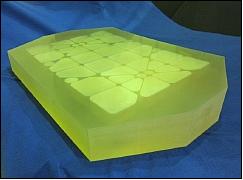
Figure 2 shows the prototype primary mirror for the telescope. An ultralow-expansion glass-ceramics material was employed for the mirrors. The primary mirror for the nadir-looking telescope was nearly 0.9 m x 0.6 m in size. Because it was an off-axis telescope, it needed a mirror that was much larger than the effective aperture. The use of an ultraprecise grinding technology before polishing can realize high-speed processing of a large aspheric mirror surface.
To realize a wide swath without mechanical scanning, an array of ~ 65,000 pixels was needed for the FPA of the panchromatic nadir-looking detector. The detector configuration was comprised of eight CCD arrays, each of ~ 8,000 pixels. These CCD arrays were put side by side in the focal plane. The spectral selection was created by placing a filter in front of the CCD arrays. SiC (Silicon Carbide) was used for the focal plane. This material offered very good thermal conductance, a low CTE (Coefficient of Thermal Expansion) for acceptable dimensional stability, and a very high mechanical rigidity with a low mass. JAXA manufactured the SiC focal plane with good results.
The PRISM-2 instrument was a two-line imager with two independent catoptric systems for nadir- and backward-looking optics and FPAs to achieve along-track stereoscopy. The backwards-looking panchromatic sensor would have been installed on the instrument with a 23.8º backward offset from the nadir direction. The observation geometry of the nadir- and backward images would have resulted in nearly simultaneous stereo imagery.
The backward-looking panchromatic FPA was of a similar configuration to the nadir-looking sensor. The spatial resolution of the backwards-looking sensor was ~ 1.25 m (when the spacecraft is nadir pointed) and the swath is 50 km. About 40,000 pixels were needed for the FPA; the detector configuration was comprised of six CCD arrays, each of ~ 8,000 pixels.
Imager observation scheme | Pushbroom |
GSD (Ground Sample Distance) | Nadir-looking: 0.8 m |
Swath width | 50 km |
Spectral range | 0.52-0.77 µm |
Detectors for nadir-looking observations | Si array of 65,000 pixels (8 CCD arrays of ~ 8000 pixels each) |
Data quantization | 11 bit / pixel |
Data compression technique | JPEG2000 (or JPEG200 equivalent method) |
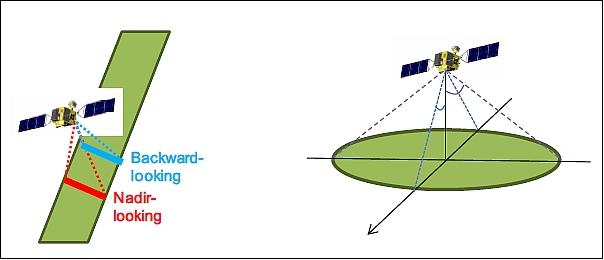
Legend to Figure 4: The left image shows the stereo observation concept for a two-line pushbroom stripmap imaging. The right image illustrates the pointing capability (±60º) of the very agile spacecraft. PRISM-2 enables quick access to any point in Japan within a day with spacecraft body-pointing.
HISUI (Hyperspectral Imager Suite)
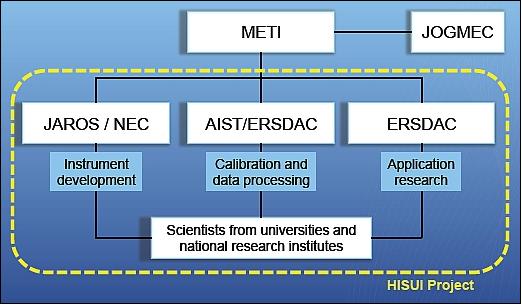
HISUI, a hyperspectral and multispectral pushbroom imaging instrument, is of ASTER (Advanced Spaceborne Thermal Emission and Reflection Radiometer) heritage of JAXA, flown on the Terra mission of NASA (launch Dec. 18, 1999) with a mission life of > 10 years obtained in 2010. The design/development of the HISUI instrument started in 2007, the project is funded by METI (Ministry of Economy, Trade, and Industry), managed by JAROS (Japan Resources Observation System Organization), and built by NEC Corporation. 8) 9) 10) 11) 12) 13) 14) 15)
The objectives of the HISUI mission are:
1) Global energy and resource related applications
- Oil, gas, metal,
- Observations for environmental assessments which are indispensable to resource developments
2) Other applications such as environmental monitoring, agriculture, and forestry
3) Promotion of domestic space and space utilization industry through wider applications of HISUI data.
HISUI is comprised of two elements:
- a multispectral imager, also referred to as MSS (Multispectral Sensor), with excellent spatial resolution and swath width,
- a hyperspectral imager, also referred to as HSS (Hyperspectral Sensor), with a high identification capability thanks to a high wavelength resolution (total of 185 bands). 16)
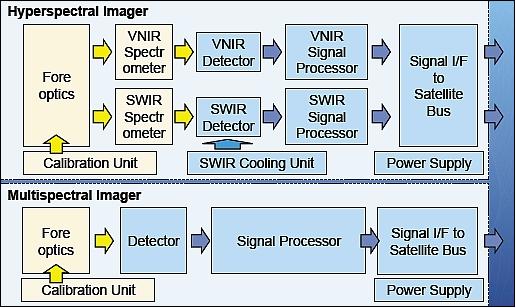
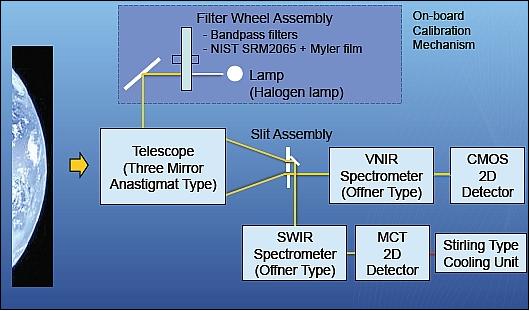
The hyperspectral imager (or radiometer) covers the spectral range from the visible to the SWIR (Short-Wavelength Infrared) region (0.4 – 2.5 µm). To satisfy high SNR (Signal-to-Noise Ratio), the diameter of the telescope is designed with an aperture of 30 cm for the ground sampling distance of 30 m. An off-axis three mirror anastigmat type (TMA) telescope is used with an F-number of 2.2. The ground footprint is projected to the slits with the gap of 30 µm. The light entering the slits is introduced to two spectrometers, one for the VNIR (Visible and Near Infrared) radiometer, and the other for the SWIR radiometer. Both spectrometers adopted a reflective grating system.
Spectrograph:
For the hyperspectral radiometer application, aberration-corrected Offner-type spectrographs are selected. Since the wavelength region of the hyperspectral radiometer is wide, two spectrographs are manufactured and each of them is optimized for the VNIR and the SWIR region, respectively.
Detectors:
For the VNIR region, backside illuminated silicon CMOS detectors are selected since a CMOS-type detector implementation features low smear and blooming. For the SWIR region, a PV-MCT (Photovoltaic Mercury Cadmium Telluride) type linear array is selected due to its high and uniform quantum efficiency throughout the SWIR region and its low dark current behaviour at temperatures of <150 K.
The SWIR detector is mounted inside a dewar and cooled down to ~145 K by using a Stirling cryocooler to decrease the dark current down to a negligible level.
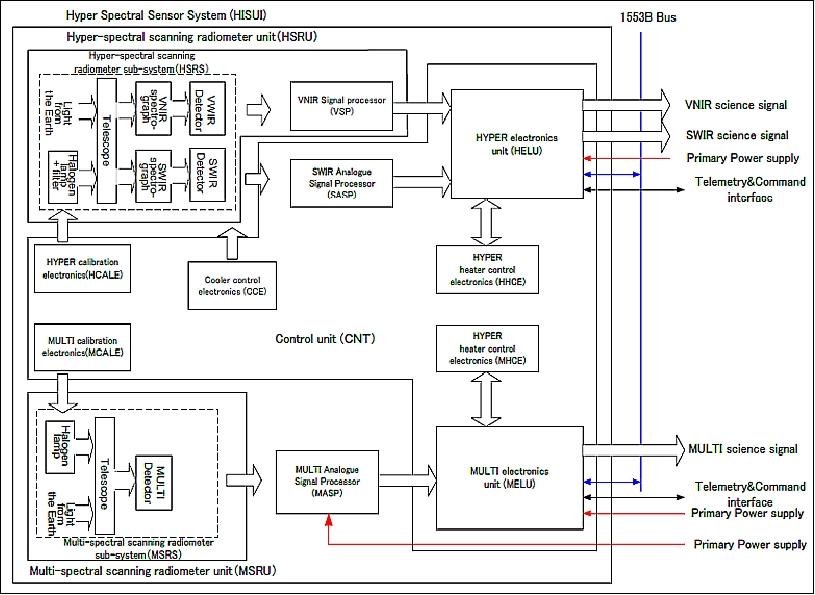
A HELU (Hyper Electronics Unit) functions as a signal processor of the hyperspectral data stream. HELU makes the correction of PRNU (Photo Response Non-Uniformity), non-linearity, offset and smile distortion. In order to reduce the data size, data binning in spectral direction and lossless data compression are implemented at HELU. The detector pixels are binned in the spectral direction, over 4 pixels for the VNIR case and over 2 pixels for the SWIR case, in order to produce unity image pixels.
Parameter | ASTER | HISUI (Hyperspectral Imager Suite) | ||
MSS (Multispectral Sensor) | HSS (Hyperspectral Sensor) | |||
GSD (Ground Sampling Distance) | VNIR | 15 m | 5 m | 30 m |
SWIR | 30 m | - | 30 m | |
TIR | 90 m | - | - | |
Swath width | 60 km | 90 km | 30 km | |
| VNIR | Band1: 0.52 - 0.60 µm | 0.45 - 0.52 µm | 0.4 - 0.97 µm |
SWIR | Band4:1.6 – 1.7 µm |
| 0.9 - 2.5 µm | |
TIR | Band10:8.125 – 8.475 µm |
|
| |
| VNIR | Band1,2,3N,3B: > 200 | ≥ 200 | ≥ 450 @ 0.62 µm |
SWIR | Band4 > 200 |
|
| |
TIR (NEDT) | Band 10,11,12,13,14: < 0.3 K | - | - | |
Data quantization |
|
| 12 bit | 12 bit |
Data rate (70% compression) |
| 1 Gbit/s | 0.4 Gbit/s | |
Pointing capability |
|
| None | ±3º (±30 km) |
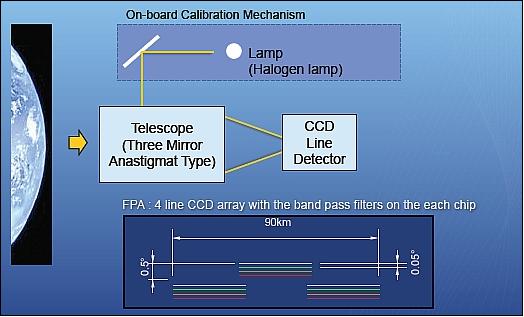
The multispectral radiometer covers the VNIR spectral region with a ground sampling distance of 5 m, which satisfies the user requirement for high spatial resolution. The blue band is added for those users who investigate seawater regions. The radiometric accuracy is almost the same as that of the ASTER, and a better MTF (Modulation Transfer Function) performance is expected using the new scanning technique. The wide swath of 90 km is achieved using the three-mirror off-axis telescope, which increases the observation frequency of the specified target areas. The optical components are arranged to minimize stray light caused by reflection at the elements. A back-illuminated Si-CCD detector array is adopted with a filter assembly for four bands. 17)
Since the smile and keystone phenomena distort the spectrogram, which is difficult to correct by data processing, a fine spectrogram is obtained at the interval of 2.5 nm for VNIR and 6.75 nm for the SWIR range that are decimated on-board by shifting data in the spectrum direction to correct the smile distortion. Therefore, the smile distortion is minimized and the response function is improved. The resulting SNR is 450 and 300 for the VNIR and SWIR ranges, respectively.
The VNIR spectral range employs a Si-CMOS detector array while the SWIR range uses an HgCdTe detector array. The SWIR detector is cooled with a Stirling type cryocooler.
The hyperspectral imager of HISUI features a pointing capability in cross-track of ~±3º, corresponding to a ±30 km shift from nadir (Figure 12).
TMA (Three Mirror Anastigmat) optics:
The MSS and HSS devices use TMA optics. The mirrors are made from glass ceramic material Zerodur (Schott, Germany), as well as from NTSiC (New Technology Silicon Carbide) developed in Japan. NTSiC is a high strength reaction sintered SiC material developed by combining key technologies and expertise of several Japanese manufacturers (NEC Toshiba, ). 18) NTSiC is pore-free and can be polished without cladding material like CVD (Chemical Vapor Deposition) SiC. Such an additional layer enables obtaining excellent polishing quality but requires large special furnaces. Another concern is the bimetallic effect that may appear when applying such a polishing layer and the risk of going through this layer during the lapping and polishing process (Ref. 16).
The customer decided to have M1 and M3 of the MSS TMA be made from NTSiC material. This choice was also dictated by the fact that these two mirrors were quite of the same dimension of nearly 300 mm x 500 mm. Each of the six mirrors of the MSS and HSS TMA instruments is lightweight, polished coated, equipped with electrical grounding straps, and fitted with pads and MFDs (Mirror Fixation Devices).
Parameter | Hyperspectral pushbroom radiometer | Multispectral pushbroom radiometer | |
Spectral region | VNIR | SWIR | VNIR |
IFOV (@ 618 km altitude) | 48.5 µrad (30m) | 8.1 µrad (5 m) | |
FOV (swath width) | 48.5 mrad (~30 km) | 144.7 mrad (~90 km) | |
Observation frequency | ≤4.36 ms | ≤0.73 ms | |
Wavelength region | 400-970 nm (57 bands) | 900-2500 nm (128 bands) | B1: 485 nm, B2: 560 nm |
Spectral resolution (sampling, band width) | 10 nm | 12.5 nm | B1: 70 nm, B2: 80 nm |
ILS (Instrument Line Shape) spectral resolution, FWHM | ≤11 nm | ≤16 nm | - |
Dynamic range | Saturated at ≥70% albedo | Saturated at ≥70% albedo | Saturated at ≥70% albedo |
SNR | ≥450 @ 620 nm | ≥300 @ 2100 nm | ≥200 (for each band) |
MTF | ≥0.2 | ≥0.2 | ≥0.3 |
Smile and keystone | ≤1 image pixel | ≤1 image pixel | - |
Calibration accuracy (radiometric) | Absolute: ± 5%, among bands: ± 2% | Absolute: ± 5%, among bands: ± 2% | |
Calibration accuracy (spectral) | 0.2 nm | 0.625 nm | - |
Data quantization | 12 bit | 12 bit | |
Mission life | 5 years | 5 years | |
HISUI instrument calibration:
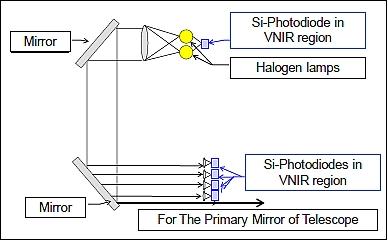
The National Institute of Advanced Industrial Science and Technology (AIST) is responsible for the radiometric calibration of HISUI. The long-term radiometric calibration is indispensable for quality assurance and control of data products. There is an onboard calibration system in the hyperspectral radiometer and the multispectral radiometer. 19)
The onboard calibration system for the hyperspectral radiometer is able to perform radiometric and spectral calibration. This calibration system has two halogen lamps, some photodiode detectors, some band pass filters and spectral calibration filter. The types of photodiode detectors are Si photodiodes for the VNIR region and InGaAs photodiodes for the SWIR region.
The onboard calibration system for the multispectral radiometer is able to perform radiometric calibration. The system has two halogen lamps and some photodiode detectors. The types of photodiode detectors are Si photodiodes with and without bandpass filter. The wavelength regions of these bandpass filters are of the same wavelength region that is used for detectors for observation.
In the evaluation model of the hyperspectral radiometer, the spectral calibration accuracy had been evaluated in the air environment and in the thermal vacuum environment. The tests under air environment verified the results when comparing with each wavelength calculated by spectral calibration filter and Hg-Ar lamp. The result of these tests was < 0.16 nm in the VNIR region, and < 0.4 nm in the SWIR region (Ref. 15).
Several on-orbit calibration methods have been conducted for previous and ongoing satellite missions, such as onboard calibration using equipped onboard lamps as reference light sources, vicarious calibration comparing brightness of terrestrial targets with in-situ measurements, cross calibration comparing the brightness with other satellite sensors, and Lunar calibration treating Moon as a known brightness light source. Since satellites in space can observe the Moon without considering the atmosphere and aerosols, it enables to provide more accurate radiometric calibration, especially in the near-infrared wavelength region where strong water absorptions exist. 20)
New lunar reflectance model:
The HISUI lunar calibration requires a reflectance model which is composed of enough spectral bands along with sufficient spatial resolution. A new lunar reflectance model has been proposed based on the hyperspectral data of the SP (Spectral Profiler) onboard the SELENE mission which was a Japanese Moon satellite operated in the period 2007 – 2009. The model covers a wavelength range from 500 nm to 1600 nm and it also involves lunar surface photometric properties depending on the incident, emission and phase angles.
The values of the model are given in sizes for every 0.5º x 0.5º in lunar longitude and latitude, which is comparable to the resolution of a lunar observation by the HISUI hyperspectral imager; this method enables to evaluate the brightness of every pixel. This new SP-based lunar calibration model is useful not only for HISUI but also for other ongoing and future multispectral and hyperspectral missions; the model will be made available to the public.
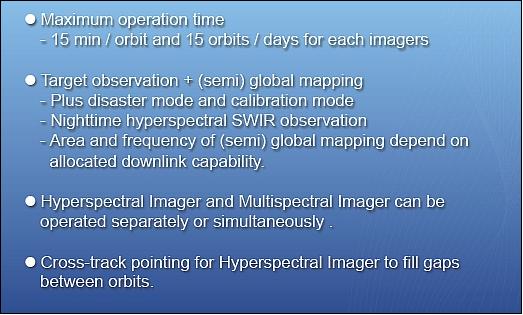
HISUI operations plan and coverage:
The high source data rate of HISUI (1 Gbit/s + 0.4 Gbit/s) at 70% compression requires a duty cycle of the instrument as well as an allocation of the downlink communication resources of the spacecraft.
The cumulative land observation time of each ALOS-3 orbit is shown in Figure 14. Although the time necessary for land observation in an orbit varies from 48 to 2030 seconds, its average was about 15 minutes which was close to HISUI's maximum total observation time in an orbit. In addition, HISUI could have separated its observation time to several segments to avoid open oceans and observe land and coastal areas efficiently. According to the simulation, five segments would have been enough for most of daytime land observation. 21)

The global mapping of the HISUI hyperspectral imager is limited by its narrow swath (30 km) and huge data amount. Table 5 shows the simulation results of global mapping achievement by HISUI hyperspectral imager for various observation days. If HISUI hyperspectral imager could downlink 300 GByte of data per day, which was about 20% of ALOS-3's downlink capacity, more than 40% of the global land surface would have been observed at least once in four months and more than 97% in ten months.
Observation days | Global mapping achievement (%) |
60 | 36.1 |
120 | 43.6 |
180 | 56.9 |
240 | 86.7 |
300 | 97.4 |
360 | 99.7 |
References
1) Hiroko Ima, Haruyoshi Katayama, Tadashi Imai, Shinichi Suzuki, Yasushi Hatooka, Yuji Osawa, “A Conceptual Design of the Optical Satellite for the Post-ALOS Program,” Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-n-03
2) Tadashi Imai, Haruyoshi Katayama, Hiroko Imai, Yasushi Hatooka, Shinichi Suzuki, Yuji Osawa, “Current status of Advanced Land Observing Satellite-3 (ALOS-3),” Proceedings of SPIE, 'Sensors, Systems, and Next-Generation Satellites XIV,' edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, Vol. 7826, Toulouse, France, Sept. 20-23, 2010, paper: 7826-11, doi: 10.1117/12.866289
3) Tatsuyuki Hanada, “R & D activities of JAXA in the field of space laser communication,” CCSDS Optical Channel Coding and Modulation SIG, May 4, 2010, Portsmouth, VA, USA, URL: http://cwe.ccsds.org/sls/docs/SLS-OCM/Meeting%20Materials/2010_05_Portsmouth/Presentations/OCM_SIG_JAXA_100504.pdf
4) Hiroko Imai, Haruyoshi Katayama, Shinichi Suzuki, Yasushi Hatooka, Yuji Osawa, “The Latest Status of Advanced Land Observing Satellite-3,” Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-n-19
5) Hiroko Imai, Haruyoshi Katayama, Masakazu Sagisaka, Yasushi Hatooka, Shinichi Suzuki, Yuji Osawa, Masuo Takahashi, Takeo Tadono, “A conceptual design of PRISM-2 for Advanced Land Observing Satellite-3 (ALOS-3),” Proceedings of SPIE Remote Sensing 2012, 'Sensors, Systems, and Next-Generation Satellites,' Edinburgh, Scotland, UK, Vols. 8531-8539, Sept. 24-27, 2012
6) Hiroko Imai, Fumi Ohgushi, Haruyoshi Katayama, Masakazu Sagisaka, Shinichi Suzuki, Yuji Osawa,Takeo Tadono, “Wide swath and high resolution stereo mapping by PRISM-2 onboard ALOS-3,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
7) Takeo Tadono, Hiroko Imai, Fumi Ohgushi, Junichi Takaku, Tomohiro Watanabe, “Feasibility Study of PRISM-2 onboard ALOS-3 — simulated image generation,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
8) Nagamitsu Ohgi, Akira Iwasaki, Takahiro Kawashima, Hitomi Inada, “Japanese hyper-multispectral mission,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
9) Tsuneo Matsunaga, Nagamitsu Ohgi, “Japanese Hyperspectral and Multispectral Sensor System Development Status,” Proceedings of the 2nd HyspIRI Science Workshop, Pasadena, CA, USA, August 11 – 13, 2009, URL: https://web.archive.org/web/20240804090943/http://hyspiri.jpl.nasa.gov/downloads/2009_Workshop/day3/day3_7._090813_HyspIRI_Matsunaga_05.pdf
10) Tsuneo Matsunaga, Akira Iwasaki, Osamu Kahimura , Kenta Ogawa, Nagamitsu Ohgi, Satoshi Tsuchida, “HISUI - A Japanese Spaceborne Hyperspectral and Multispectral Remote Sensing Mission,” HyspIRI Science Workshop, Aug. 24-26, 2010 ,Pasadena, CA, USA, URL: https://web.archive.org/web/20240804085812/http://hyspiri.jpl.nasa.gov/downloads/2010_Workshop/day3/day3_9_Matsunaga_1008_HISUI_HyspIRIWS.pdf
11) Tsuneo Matsunaga, Satoshi Tsuchida, Akira Iwasaki, Jun Tanii, Osamu Kahimura, Shuichi Rokugawa, “Current Status of Hyperspectal Imager Suite (HISUI),” 2011 HyspIRI Science Workshop, Aug 23-25, 2011, Washington DC, USA, URL: https://web.archive.org/web/20241204103307/http://hyspiri.jpl.nasa.gov/downloads/2011_Workshop/day2/23.1108_HISUI_HyspIRIWS_06.pdf
12) Akira Iwasaki, Nagamitsu Ohgi, Jun Tanii, Takahiro Kawashima, Hitomi Inada, “Hyperspectral Imager Suite (HISUI) - Japanese hyper-multispectral radiometer,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
13) Jun Tanii, Akira Iwasaki, Takahiro Kawashima, Hitomi Inada, “Results of Evaluation Model of Hyperspectral Imager Suite (HISUI),” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
14) Tsuneo Matsunaga, Akira Iwasaki, Satoshi Tsuchida, Jun Tanii, Osamu Kashimura, Hirokazu Yamamoto, Shuichi Rokugawa, “Current Status of Hyperspectral Imager Suite (HISUI) Project,” 2012 HyspIRI Science Workshop, October 16-18, 2012, Washington DC, USA, URL: https://web.archive.org/web/20250110185218/http://hyspiri.jpl.nasa.gov/downloads/2012_Workshop/day3/4_Matsunaga_HISUI_Status.pdf
15) Jun Tanii, Akira Iwasaki, Hitomi Inada, Yoshiyuki Ito, “The Flight Model Designed and Performances of Hyperspectral Imager Suite (HISUI),” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
16) J. Rodolfo, R. Geyl, H. Leplan, E. Ruch, “TMA Optics for HISUI HSS and MSS Imagers,” Proceedings of the ICSO (International Conference on Space Optics), Ajaccio, Corse, France, Oct. 9-12, 2012, paper: ICSO-064, URL: http://congrex.nl/icso/2012/papers/FP_ICSO-064.pdf
17) Yasushi Kojima, Yoshiaki Ohkami, “Knowledge Base for Improving Image Quality of Future Earth Observing Spacecraft,” Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-t-01
18) Tsuno Katsuhiko, Irikado Hiroshi, Oono Kazuhiko, Suyama Shoko, Itoh Yoshiyasu, “NTSiC (New Technology SiC): The Progress of recent two years,” Proceedings of the 6th ICSO (International Conference on Space Optics), ESA/ESTEC, Noordwijk, The Netherlands, 27-30 June 2006, (ESA SP-621, June 2006)
19) Akihide Kamei, Kazuki Nakamura, Tetsushi Tachikawa, Hirokazu Yamamoto, Ryosuke Nakamura, Satoshi Tsuchida, “The long-term vicarious and cross calibration plan for Hyperspectral Imager Suite (HISUI),” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
20) Toru Kouyama, Yoshiaki Ishihara, Ryosuke Nakamura, Satoshi Tsuchida, Tsuneo Matsunaga, Fumihiro Sakuma, Yasuhiro Yokota, Hirokazu Yamamoto, Satoru Yamamoto, “Usability of Lunar Reflectance Model based on SELENE/SP for planned HISUI Radiometric Calibration,”Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
21) T. Matsunaga, S. Yamamoto, O. Kashimura, T. Tachikawa, K. Ogawa, A. Iwasaki, S. Tsuchida , N. Ohgi, “Operation Plan Study for Japanese Future Hyperspectral Mission: HISUI,” 34th ISRSE (International Symposium on Remote Sensing of Environment), Sydney, Australia, April 10-15, 2011, URL: http://www.isprs.org/proceedings/2011/ISRSE-34/211104015Final00771.pdf
22) JAXAJapan Aerospace Exploration Agency, March 7, 2023 (JST), “Launch Failure of the First H3 Launch Vehicle and Setting up a Special Task Force”, URL: https://global.jaxa.jp/press/2023/03/20230307-2_e.html
23) Mike Wall, February 17, 2023, “Japan's new H3 rocket aborts 1st-ever launch attempt”, URL: https://www.space.com/japan-h3-rocket-first-launch-attempt-abort