AlSat-2 (Algeria Satellite-2)
EO
Operational (extended)
ASAL
The AlSat-2 (Algeria Satellite) mission consists of two identical satellites, AlSat-2A and AlSat-2B, that were launched in July 2010 and September 2016 respectively. These optical imaging satellites are operated by the Algerian Space Agency (ASAL) for a diverse number of applications: cartography, agricultural management, crop monitoring, and disaster management.
Quick facts
Overview
| Mission type | EO |
| Agency | ASAL |
| Mission status | Operational (extended) |
| Launch date | 12 Jul 2010 |
| CEOS EO Handbook | See AlSat-2 (Algeria Satellite-2) summary |
Summary
Mission Capabilities
Both AlSat-2 satellites carry a single instrument, the New AstroSat Optical Modular Instrument (NAOMI), a high-resolution optical imager. It is used to take a variety of high-resolution images of Algeria for a variety of purposes such as cartography, agricultural management, crop monitoring, and disaster management.
Performance Specifications
NAOMI observes over five different bands, one panchromatic band and four multispectral bands (blue, green, red, and near-infrared). It has a swath width of 17.5 km and a spatial resolution of 2.5 m when being viewed in the panchromatic band, and a resolution of 10 m when being viewed in a multispectral band.
The AlSat-2 satellites undertake the same sun-synchronous orbit, 180° out of phase, with an altitude of 670 km, an inclination of 98.23°, and a period of 98 minutes.
Space and Hardware Components
Algerian engineers part of the ALAS (Algerian Space Agency) worked with the French aerospace manufacturer, Astrium, to design and build AlSat-2A. In late 2013 Astrium merged with Cassidian to form Airbus Defence and Space. ALAS then built AlSat-2B independently.
AlSat-2A and -2B implement the AstroSat-100 bus and weigh 116 kg. Both satellites were launched aboard a PSLV (Polar Satellite Launch Vehicle) from the Satish Dhawan Space Centre (SDSC) in India.
X-band radio frequencies download payload data at a rate of 60 Mbit/s. TT&C (Telemetry, Tracking, and Control) transfer data via S-band with an uplink rate of 20 kbit/s and a downlink rate of 384 kbit/s.
AlSat-2 (Algeria Satellite-2)
Spacecraft Launch Mission Status Sensor Complement References
Overview
AlSat-2 is an optical Earth observation project of CNTS (Algerian National Space Technology Centre). In Feb. 2006, CNTS signed an agreement with EADS Astrium SAS to design and built two satellites. The first of these, AlSat-2A, will be integrated and tested in France at EADS Astrium, whereas the second one, AlSat-2B, will be integrated in Algeria within the CDS (Satellite Development Center) in Oran. The AlSat-2 program includes the construction of two ground control segments as well as one station for high-speed downlinks of imagery permitting spacecraft operations from Algerian territory, a country of 2.38 million km2 in size. 1) 2) 3) 4)
The cooperation agreement makes provision for Algerian engineers to work side-by-side with the EADS Astrium development team, with intensive training given in space technology. The AlSat-2 contract lays the foundation for sustained co-operation with Algerian institutions in the fields of space technology for Earth observation, and its applications, as well as in the field of telecommunications. 5)
The system will enable Algeria to obtain very high quality images for use in a wide variety of applications: cartography, management of agriculture, forestry, water, mineral and oil resources, crop protection, management of natural disasters and land planning.
The Algerian government created its Space Agency in January 2002, ASAL (Agence Spatiale Algérienne) or Algerian Space Agency, to develop, promote, and manage the countries space program.
Background: AlSat-1 of CNTS is being flown in the DMC (Disaster Monitoring Constellation), a 5 spacecraft optical imaging constellation developed and coordinated by SSTL (Surrey Satellite Technology Ltd), UK. AlSat-1 was launched on Nov. 28, 2002, the spacecraft is operating nominally as of 2009 providing multispectral imagery of 32 m resolution in a swath of 600 km.
Note: CNTS is also known by the name of CTS/ASAL (Centre of Space Techniques/Algerian Space Agency).

Spacecraft
AlSat-2 is the first Earth observation satellite system of the AstroSat-100 (AS-100) family; the design is based on the Myriade platform of CNES (Myriade heritage of CNES DEMETER and Parasol missions, plus four Essaim microsatellites built by EADS Astrium for DGA, France). Note: CNES signed partnership agreements with AAS (Alcatel Alenia Space) and EADS/Astrium SAS which permits them to use the Myriade bus design and products for their own applications/missions (defense, commercial market, etc.). EADS/Astrium refers to its customized Myriade platform version as AstroSat-100, capable of accommodating a payload of up to 50 kg and providing up to 50 W DC power. 6) 7)
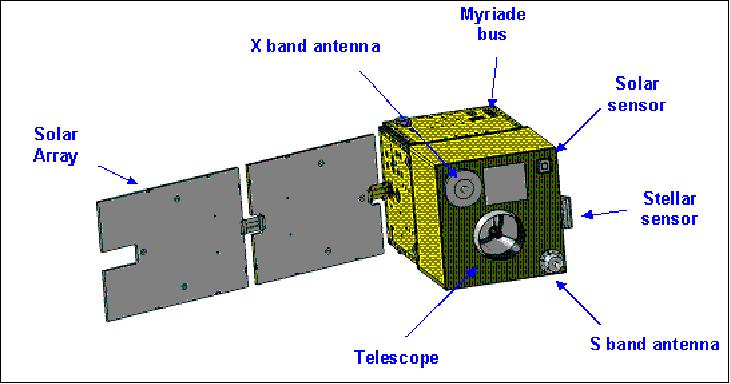
The spacecraft structure is an aluminum box of size: 60 cm x 60 cm x 100 cm. Figure 2 shows the platform mechanical accommodation; all 4 panels of the structure fold out during integration, allowing easy access to all equipment during platform integration. This accommodation allows a good level of flexibility with respect to the payload size.
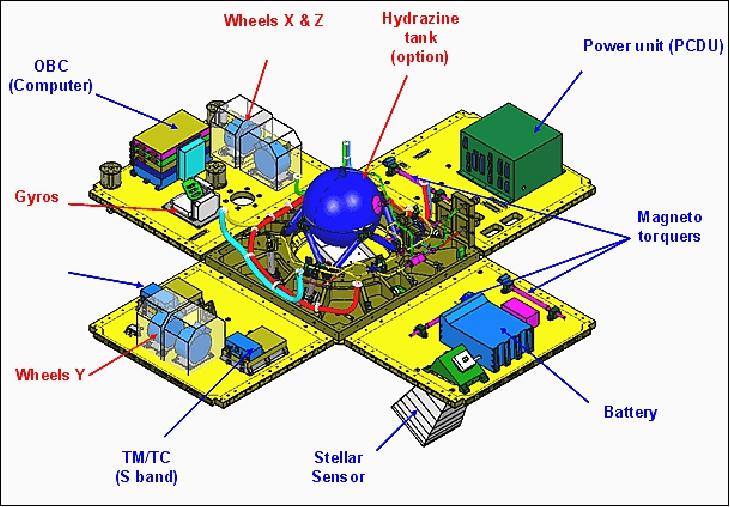
AlSat-2 is 3-axis stabilized. Attitude sensing is provided by 3 sun sensors, a star sensor, a magnetometer, and an IRU (Inertial Measurement Unit); actuation is provided by 4 reaction wheels (each of 0.12 Nms) and magnetorquers. A GPS receiver is used for onboard location and time services. The spacecraft has a body-pointing capability of ±30º in cross-track.
The EPS (Electric Power Subsystem) features an AsGa solar array providing a power of 180 W (EOL). In addition, there is a Li-ion battery of 15 Ah capacity. - A T805 serves as OBC (Onboard Computer). A hydrazine propulsion subsystem (N2H4, ΔV = 70 m/s) is being used for on-orbit maintenance.
RF communications: AlSat-2 features an onboard SSR (Solid-State Recorder) of 64 Gbit capacity. Communications are provided in X-band with a downlink rate of 60 Mbit/s. For TT&C support, 2 S-band transceivers are utilized (CCSDS, 20 kbit/s TC, 25-384 kbit/s TM).
The TT&C and payload data are being acquired at the Arzew station complex in western Algeria (Oran region), where the imagery is analyzed and from where the spacecraft is being controlled.
Spacecraft structure | Aluminum bus structure, Size: 60 cm x 60 cm x 100 cm |
Spacecraft mass | 116 kg |
AOCS (Attitude & Orbit Control Subsystem) | - Magnetic autonomous acquisition |
EPS (Electric Power Subsystem) | - Power generated by one deployable solar array (GaAs; 180 W EOL) |
On-board data handling | - On-board computer (T805, 1 Gbit DRAM/EDAC, 8 Mbit Flash EEPROM) |
Payload data management | - X band downlink: 60 Mbit/s |
Performance | - Spacecraft launch mass: 116 kg |

Orbit: Sun-synchronous near-circular orbit, altitude = ~670 km, inclination of 98.23º, period = 98 minutes, LTDN (Local Time on Descending Node) = 21:30 hours.
Launch
AlSat-2A was launched as a secondary payload on July 12, 2010 on a PSLV launcher (PSLV-C15). The launch site was the Satish Dhawan Space Centre (SDSC) SHAR, Sriharikota, India. Antrix Corporation Ltd. of Bangalore, India, is the launch provider and marketing arm of ISRO (Indian Space Research Organization). 9)
The AlSat-2B spacecraft is scheduled for launch in 2014 (same orbital plane as AlSat-2A). This will enable Algeria to obtain very high quality images for use in a wide variety of applications, including cartography, management of agriculture, forestry, water, mineral and oil resources, crop protection, management of natural disasters and land planning.
Note: In July 2009, a TSA (Technical Safeguards Agreement) between the US and India was signed during Secretary of State Hillary Clinton's visit to India. Following this agreement, the US Government has given clearance in August 2009 for launch by ISRO of the Algerian satellites ALSat-2A and ALSat-2B, which have US components, on board an Indian space launch vehicle. 10)
The primary spacecraft on this flight was CartoSat-2B of India (694 kg), funded by the Ministry of Defense of the Government of India. 11)
Further secondary payloads on this flight were:
• AISSat-1 (Automatic Identification System Satellite-1), a nanosatellite (6.5 kg) of Norway with program management by the FFI (Norwegian Defense Research Establishment). AISSat-1 was built by UTIAS/SFL (University of Toronto, Institute for Aerospacestudies/Space Flight Laboratory), Toronto, Canada.
• TISat-1 (Ticino Satellite-1), a CubeSat (1 kg) of SUPSI (Scuola Universitaria Professionale della Svizzera Italiana — University of Applied Sciences of Southern Switzerland), Lugano-Manno, Switzerland.
AISSat-1 and TISat-1 were deployed into space using the XPOD (Experimental Push Out Deployer) provided by UTIAS/SFL. UTIAS/SFL refers to this service as NLS-6 (Nanosatellite Launch Service-6). 12)
• StudSat (Student Satellite), a picosatellite (1 kg) built by a consortium of seven Engineering colleges from Hyderabad and Bangalore, India.
AlSat-2B was launched on September 26, 2016 (03:42:00 UTC) as a secondary payload on the PSLV-C35 vehicle of ISRO. The launch site was SDSC (Satish Dhawan Space Center) on the east coast of India. The primary payload on this flight was SCATSat-1 of ISRO. 13)
Orbit: Sun-synchronous orbit of SCATSat-1, altitude = 720 km, inclination = 98.1º, LTAN = 9:30 hours. The satellite is allowed to drift to an LTAN of 8:45, orbital period of 99.19 minutes.
All secondary payloads were deployed into an orbit of 670 km altitude.
Secondary Payloads
• Pratham, a student-built nanosatellite (~10 kg) of IIT (Indian Institute of Technology) Bombay, India to study the ionosphere.
• PISAT, a student-built nanosatellite (5.3 kg) of PES University in Bengaluru, India. PISAT is a joint initiative of PES University and five other colleges. 14)
• BlackSky Pathfinder-1, a high-resolution (1 m) imaging microsatellite (~44 kg) of BlackSky Global. BlackSky Global is a commercial company of Seattle, WA, USA. The goal of BlackSky Global is to build a constellation of 60 satellites by 2019.
• AlSat-1N, AlSat-1B and AlSat-2B of ASAL (Algerian Space Agency), Algiers, Algeria. The three satellites were manufactured at SSTL in partnership with Algerian engineers, ALSAT-1B is a 103 kg microsatellite based on the SSTL-100 bus. It carries an Earth imaging payload with panchromatic and multispectral cameras. AlSat-2B (117 kg) carries the NAOMI (New AstroSat Optical Modular Instrument). AlSat-1N (AlSat-Nano) is a 3U CubeSat which carries a technology demonstration payload as part of a partnership between ASAL and the UKSA (UK Space Agency). 15)
• CanX-7, a nanosatellite (3U CubeSat, 8 kg) of UTIAS/SFL (University of Toronto's Institute of Aerospace Studies/Space Flight Laboratory), Canada.
ALSAT-2A was built and tested by Airbus Defence and Space in Toulouse in partnership with 30 engineers from ASAL, while ALSAT-2B was integrated by ASAL's engineers themselves in-country at Algeria's Satellite Development Centre (UDPS) in Oran. ALSAT-2B has a metric-cube size of 60 x 60 x 130 cm and has a design life of five years. ALSAT-2B's great success demonstrates that ASAL's engineers are fully competent and have acquired a great autonomy through this program.16)
Mission Status
• May 2019: The ALSAT-2B satellite is in orbit since 26 September 2016. It accompanies the ALSAT-2A satellite to form a constellation of two satellites. The main tasks are cartography, management of agriculture, forestry, water, crop protection, management of natural disasters and land planning. The attitude determination and control subsystem is composed of three sun sensors used during the initial attitude acquisition, one magnetometer used during the first phase and also during the coarse pointing mode, three gyroscopes and one star tracker initialized during the coarse pointing mode and used for the nominal mode. As actuators, there is three magnetorquers used for detumbling at the beginning, after that they will be used for wheel unloading. Four reaction wheels mounted in pyramidal configuration aimed to increase the angular momentum and finally a propulsion subsystem with four thrusters for orbit control. 17)
- ALSAT-2B delivers a high-resolution products consisting of a 2.5m resolution for the panchromatic band, and a 10 m resolution for the four multispectral bands, with a 17.5 km swath for both modes. The attitude determination during the nominal mode is carried out by three gyroscopes and a star tracker. The gyrostellar estimator is based on Kalman filtering; it is first initialized during the coarse pointing mode before transition to the nominal mode reason for which the estimator has enough time to converge in order to be ready for the different nominal mode pointing.
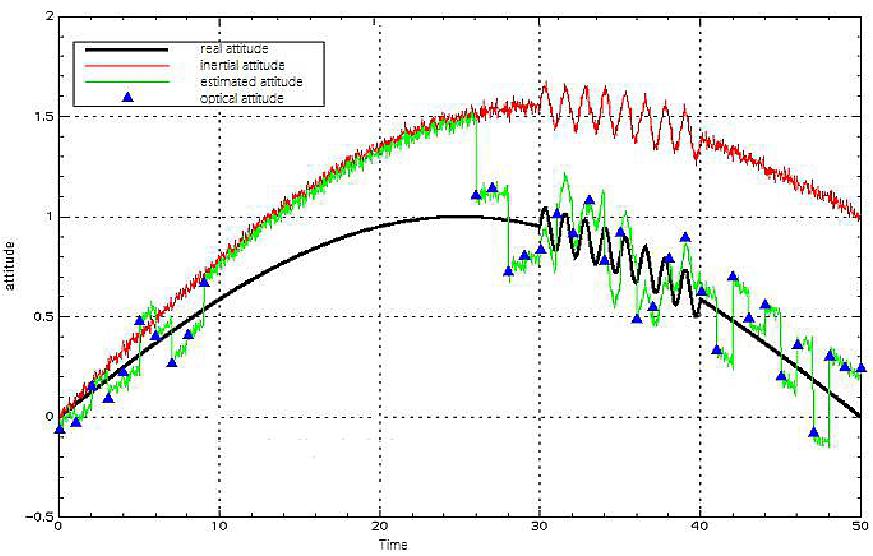
- An accurate attitude information is often essential for space applications. Several attitude sensors have been developed with star trackers (SST) being the most accurate ones for three-dimensional orientation measurements. In order to further improve the attitude accuracy, multi-sensor data fusion is the common approach. Sensor fusion generally refers to the process of combining measurements from several different sensors in order to obtain a better result than considering each sensor separately. The idea is to fuse sensors with complementary measure properties to combine their desired and cancel out their unwanted characteristics. The data fusion is usually done in an estimation filter, so commonly this method is referred to as inertial stellar or gyro stellar estimation. The association of the sensors gyro/star tracker is very complementary and natural. Gyro propagation allows to smooth-out star tracker noise and to continue ensuring accurate attitude determination when no star tracker (SST) updating is possible. Conversely, the star tracker allows compensating for long term gyro natural drift and gyro-scale factor errors during maneuvers. E.g. while a star tracker provides low frequency long-term stable attitude measurements, the attitude computed from the high-frequency gyro measurements is only short-term stable. The motivation to fuse star tracker and gyro is to generate a long-term stable attitude estimate at gyro measurement frequency of attenuated noise compared to the star tracker measurement and, hence, to optimally bridge periods where no star tracker measurement is available. In addition to the improved attitude information, the estimator provides an estimate of the gyro angular rate bias. Figure 5 shows a comparison of the inertial attitude (gyro measurement), the optical attitude (SST measurement) and the estimated attitude from the fused (gyro plus SST) data.
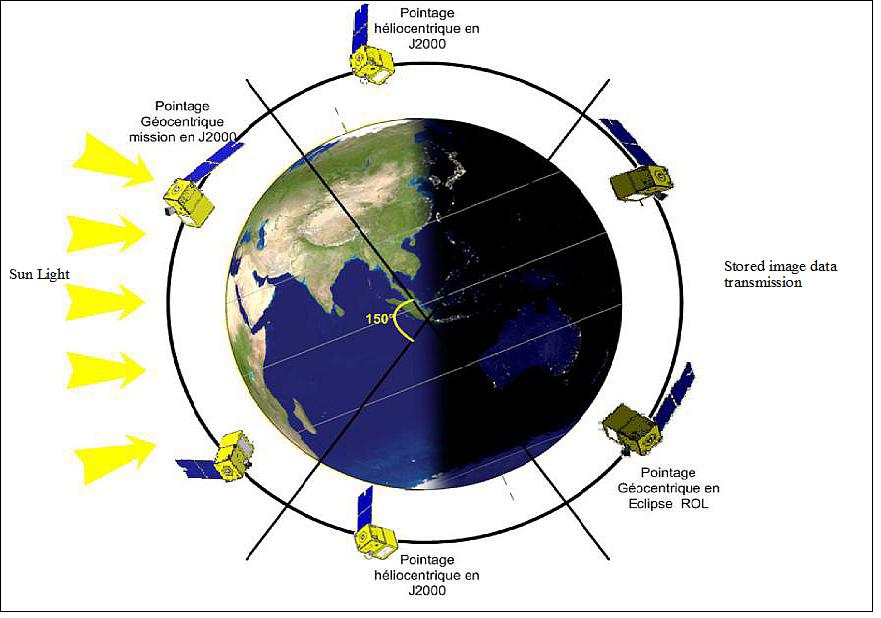
- During the nominal mode, ALSAT-2B is being pointed either toward sun (heliocentric pointing) or toward earth (geocentric pointing). The heliocentric pointing is within the daylight and the geocentric pointing appears during eclipse phase or when the satellite is in imaging or downloading modes. The different satellite pointing modes are illustrated in Figure 11. These different transitions allow the satellite to keep the equipments safe (e.g. star tracker dazzling, payload sun exposure), also for the solar array power generation, since the satellite solar arrays point the sun in the day phase, with ~ 0.025 deg/sec rotation about its minus X-axis, and for thermal balancing too. Now for the imaging mode and with the agility as a key feature, ALSAT-2B carries out the maneuvers to reach 30 deg either being along track or cross track.
- The assessment has been done throughout two years in orbit for the attitude estimator in terms of performance. It should be noticed here that along these two years, the obtained results fulfill the requirements and all of them fall under the specifications.
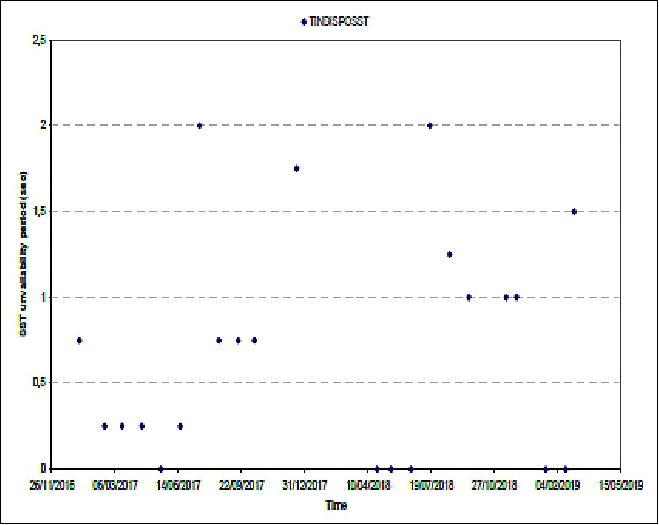
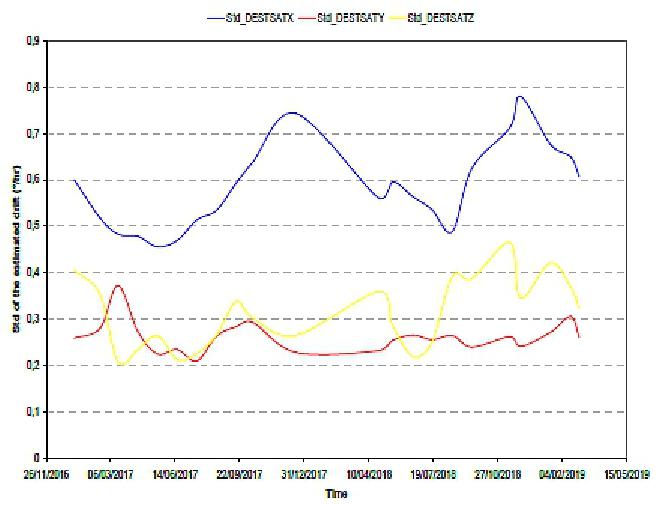
- Regarding the gyro stellar estimator performance we tried to select the main observed performance. So, in Figures 6 and 7, we present the observed SST unavailability periods through these last two years, we can notice that the SST availability is about 98% of the time when there is a mission plan uploaded and when there is no mission plan the SST availability falls down to 66%. For the estimated drift, we can say that it is stable along this period.
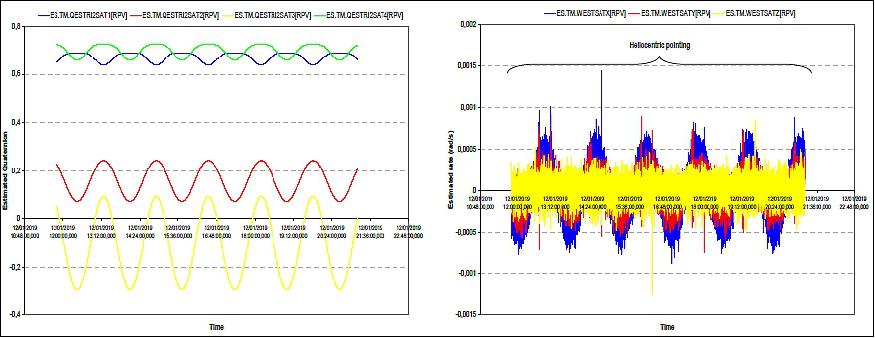
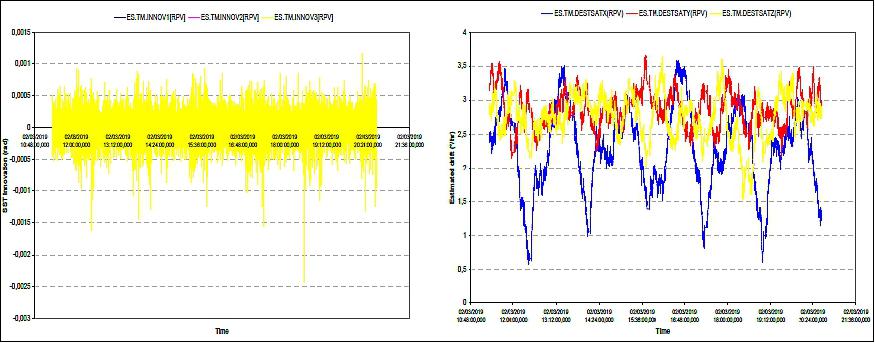
- Two cases of the nominal mode are presented below. First, we took the case where there is no mission plan uploaded and the satellite is in a complete sun pointing mode, the satellite attitude will be in helio-sinusoidal evolution as shown in Figure NO TAG# for the estimated quaternion and the angular rate. The star tracker in this case will be directly blinded by the earth for some periods reaching 20 minutes of unavailability measurements. The SST innovations and the estimated gyro drifts are illustrated in figures 9 and 10 where it can be seen clearly the effect of the earth blinding gaps on the SST innovations, a peak value occurs each time at the end of the earth blinding, no gyro drift calculation are done on this moment and the estimator will propagate the attitude.
- In the case where there is a mission plan uploaded containing the different maneuvers of imaging, day/night and night/day transitions. The SST will not be dazzled any more, just in the case of the moon presence, but this case happens monthly for short durations and not in imaging mode. The gyro stellar main performances as the estimated quaternion, the angular rate, the SST innovation and the estimated gyro drift are illustrated in Figures 9 and 10, respectively. According to these observed results where there are different maneuvers and transitions from day to night and back that are well represented by the angular rates (see Figure 9, right), we can say that the gyro stellar performances are acceptable with respect to the requirements, due to a better robustness of the SST tracking loss and a better on-board autonomy. In addition, there is a monitoring of this estimator, it concerns the gyro only estimation, if the SST is not available for a long time and the SST innovation by outing a threshold value on the level of the innovations. So, if one of these monitoring parameters is out of range a transition to survival mode is commanded.

- In summary, the observed performances of the gyro stellar estimator are presented during the first two years in orbit of the ALSAT-2B satellite, a nominal behavior is observed. The estimator has proved its performance and robustness along all this period and continue providing correct measurements.
• April 2017: The Algerian Space Agency is operating the AlSat-2 system, a constellation of two identical satellites AlSat-2A and AlSat-2B — providing products of 2.5 m resolution for the panchromatic band, and a 10 m resolution in four multispectral bands, on a swath of 17.5 swath for both modes. — The description here deals with AlSat-2A. The AlSat-2A spacecraft and its payload are operating nominally in the spring of 2017 - in their 7th year on orbit. 18)
- Satellite pointing modes: During the nominal mode the satellite will be in sun pointing i.e. toward sun (heliocentric pointing) or toward Earth (geocentric pointing). The geocentric pointing applies during the eclipse phase or when the satellite is in imaging or downloading modes, Figure 11 illustrates the different satellite pointing capabilities. These different transitions allow the satellite to keep the equipments safe (e.g. star tracker dazzling, payload sun exposure), also for the solar array power generation, since the satellite solar arrays point the sun in the day phase, with ~ 0.025 º/s rotation about its –X-axis, and for thermal balancing too. AlSat-2A performs the maneuvers to reach ±30º either being in along-track or in cross-track.
Four AOCS operational modes are used:
- MAS (Mode Acquisition et Survie) or Acquisition and Safe mode, which performs spacecraft solar pointing; it is used either for the first acquisition or the safe mode
- MGT (Mode Grossier de Transition) or Coarse Transition Mode, used to perform a coarse pointing support.
- MCO (Mode Controle d'Orbite) or Orbit Control Mode, dedicated to orbit control maneuvers; it uses a set of 4 thrusters.
- MNO (Mode Normal Operational), used for fine attitude pointing (500 µrad pointing performance); it is based on a gyro-stellar measurements.
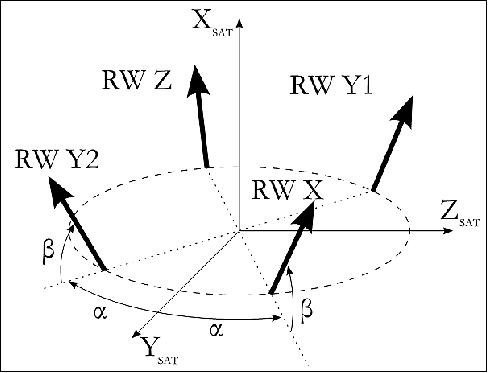
Reaction wheel configuration: The aim of pyramid configuration is to improve the satellite momentum in order to be agile and to ensure a back and forward imaging and along and across track imaging too.
In-orbit performance: Throughout the last 6 years in orbit, AlSat-2A has provided a great performance in terms of AOCS stability and agility. However, the reaction wheels, like all the equipments in space, are facing the external harsh environment to which the FDIR (Fault Detection Isolation and Recovery) strategy has been implemented to overcome these constraints especially for the SEUs (Single Upset Events). It consists on setting the concerned wheel OFF then ON, and currently, the wheels are still working without any problems.
• December 15, 2016: According to WMO OSCAR, the AlSat-2A and -2B satellites are operational. 19)
• Feb. 2015: AlSat-2A is operational. — Algeria is exposed to quite a few natural disasters such as locust invasion, forest fires, floods, earthquakes, landslides, movement of dunes, etc. Hence, it is of strategic importance for ASAL (Algerian Space Agency) to master and use space technologies for disaster management. 20)
- Since 2003, there is a collaboration between ASAL and INVP (Institut National de la Protection des Vegetaux). The objective is to provide medium resolution satellite imagery as well as expertise to identify locust breeding areas in Sahel & Saharan regions — based on ecological conditions analysis by identifying zones on space imagery, with high chlorophyll activities, favorable to locust breeding and development. An example is given in Figure 13.
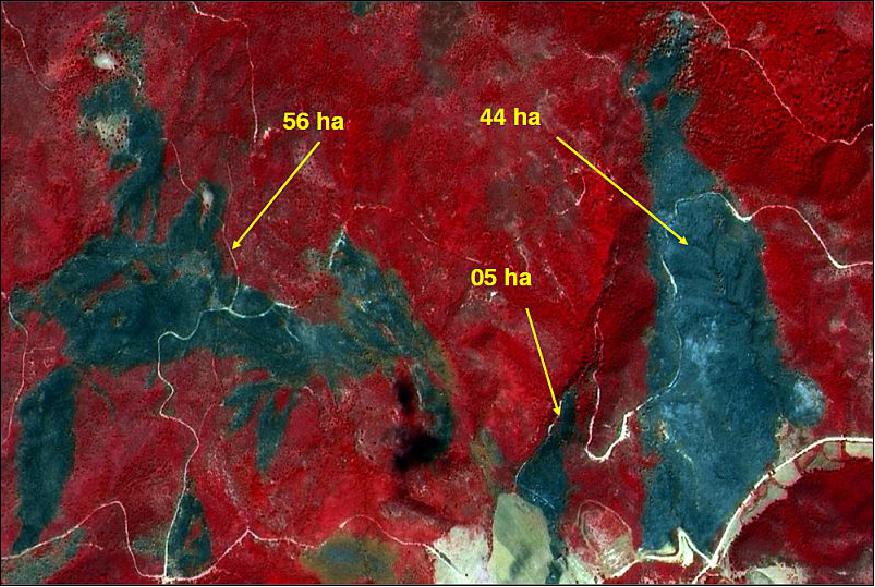
- Forest fires are another application of satellite data as shown in Figure 14.
• The AlSat-2A spacecraft and its payload are operating nominally in 2013. 21) The high-resolution imagery allows Algeria to improve and update the base and thematic mapping throughout the national territory. 22)
• During the first two years of operations many OCMs (Orbit Control Maneuvers) were executed: 10 of them were regular station keeping OCM performed for ground track corrections and 2 OCMs were performed as emergency collision avoidance maneuvers. The last station keeping OCM has been performed on September 2012 for ground track correction. 23)
Regarding the emergency maneuvers, two avoidance maneuvers were performed due to the space objects close approach to AlSat-2A in April and July 2012. CDS/ASAL had been informed of this risk by the US JSpOC (Joint Space Operations Center), who sent conjunction awareness messages. During the last years, due to the increasing population of uncontrolled man-made objects orbiting the Earth, in particular at LEO altitudes, the conjunctions and the risk of collisions between a satellite and space debris or another satellite becomes important.
• The AlSat-2A spacecraft and its payload are operating nominally in 2012.
• On Feb. 23, 2012, the President of Algeria, Abdelaziz Bouteflika, inaugurated the Algerian CDS (Center for Satellite Development) on 23, February 2012. This center is located in the town of Bir El-Djir in Oran and is an operational entity of ASAL (Algerian Space Agency). This infrastructure will allow Algeria to build the third Algerian Alsat-2 B satellite, a twin of the Alsat-2A Earth observation satellite (launch planned for 2014), and future satellite series, as well as to provide the appropriate technological environment to allow engineers and researchers to carry out activities in space technology and other related fields. 24)
• The AlSat-2A spacecraft and its payload are operating nominally in 2011. The imagery of the payload is of outstanding quality. On July 12, 2011, the AlSat-2A spacecraft was one year on orbit. 25)


Legend of Figure 16: The image shows the dense urban locations of Hammadi Krouma and Hamoudi Hamrouche (about 7.5 km south of Skikda) on each side of the river Oued Safsaf.

• Since July 21, 2010, the spacecraft operations are performed from the ALSAT-2 ground segment located in Ouargla (Algeria). The CDS/ASAL operation team is now fully autonomous to control and monitor nominally ALSAT-2A and is also able to handle anomaly situation, analyze telemetry, and correct the anomalies.
• The injection orbit delivered by PSLV-C15 was 33 km lower than the target orbit with an inclination difference of 0.1º. The transfer phase consisted therefore in increasing the semi-major axis and correcting the inclination to reach the predefined targets while targeting the frozen eccentricity. The transfer lasted 7 days during which 14 OCMs (Orbital Control Maneuvers) were performed. 27)
Sensor Complement
NAOMI (New AstroSat Optical Modular Instrument)
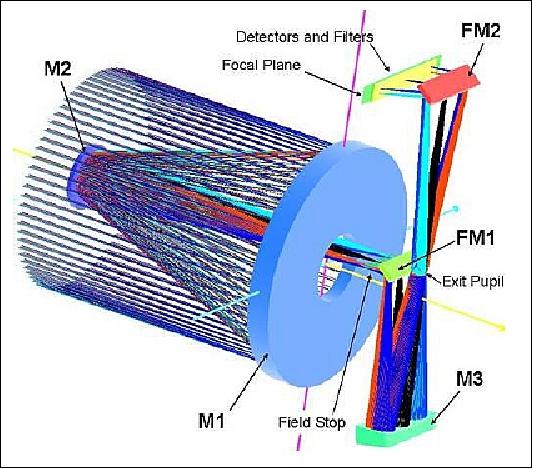
NAOMI is a high-resolution imager designed and developed at EADS Astrium SAS: The instrument design is mainly driven by mission parameters and detector characteristics. The TDI (Time Delay Integration) mode in the Pan band enables to reduce the pupil size for a given GSD (Ground Sample Distance). The pupil diameter is no more sized to comply with SNR requirements which can be achieved by increasing the number of TDI stages and is only driven by MTF (Modulation Transfer Function) requirement.
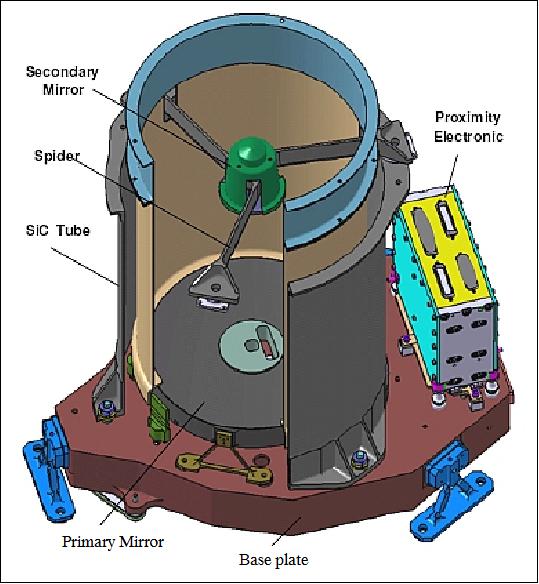
The imager provides imagery of 2.5 m in Pan and 4 multispectral (MS) bands of 10 m GSD. The optics system of the instrument employs state-of-the-art techniques such as SiC-100 (silicon carbide) material for the mirrors and the telescope structure, specific detectors, and a modular video chain design. 28) 29)
SiC is an outstanding material with the following characteristics:
- Very high stiffness and a low mass density
- Very high thermal conductivity and a low coefficient of thermal expansion
- The mirror surface can to be polished down to a roughness of a few angstrom (1Å= 10-10 m).
The primary structure is composed of three main parts: a baseplate, a cylindrical tube with a spider supporting the secondary mirror, and the focal plane. The structure also supports thermal MLI (Multi Layer Insulation).
The SiC primary mirror is mounted onto the baseplate via three isostatic Invar blades (FormoSat-2 heritage) providing good thermal decoupling between the telescope and the primary mirror. The secondary, tertiary and folding mirrors are also made of SiC. They have an incorporated isostatic foot. This type of attachment device, minimizes the number of interfaces, ensures a good thermal coupling with the structure, simplifies the integration, and improves the overall stability.
The focal plane accommodates detectors, filters and front-end electronics. All the elements are designed to cope with a multi-modules implementation capability.
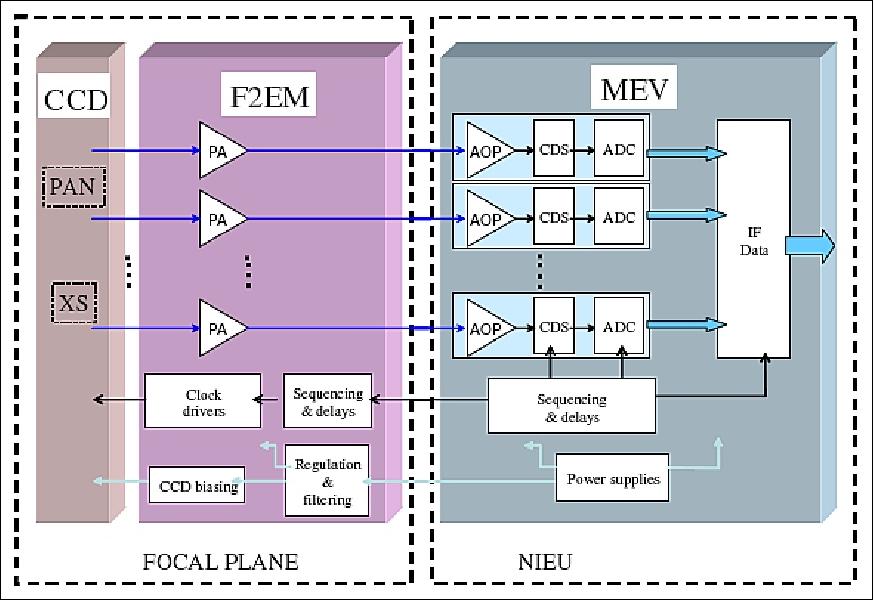
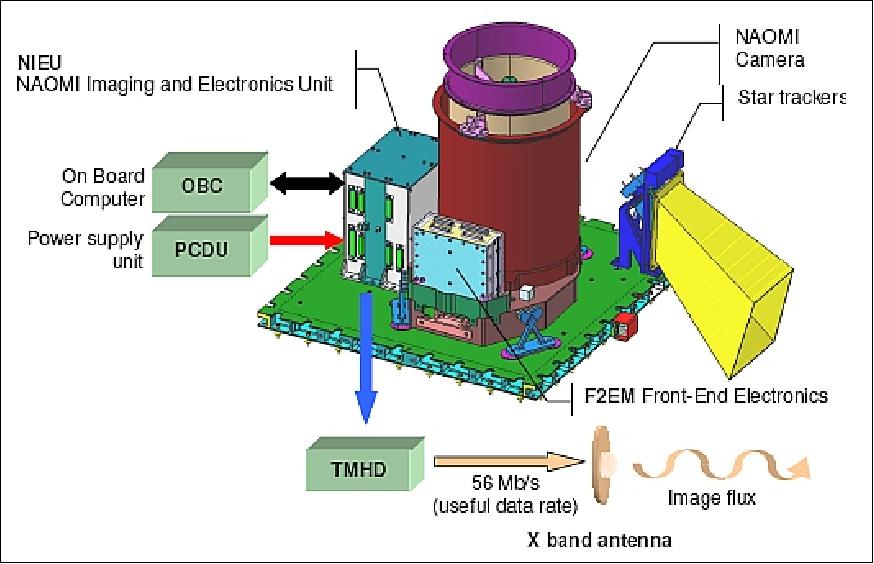
The detection chain is made of three main parts: the detectors, the F2EM (Front End Electronics Module) and the MEV (Module Electronique Video - Video Electronics Module) which are part of the NIEU (NAOMI Imaging and Electronics Unit).
Instrument type | Pushbroom imager |
Optics | - Korsch telescope with a TMA design in SiC |
Spectral band (Pan) | 0.45-0.9 µm |
MS (Multispectral bands), 4 | B1): 0.45-0.52 µm (blue |
GSD (Ground Sample Distance) | 1.5-2.5 m Pan at nadir |
Detectors | Silicon area array with 7000 pixels Pan, 1750 pixels in each MS band |
TDI (Time Delay Integration) | The Pan band offers TDI services for SNR improvement of the signal |
Swath width | 17.5 km at nadir |
FOR (Field of Regard) | ±30º (spacecraft tilting capability about nadir for event monitoring) |
Data quantization | 12 bit (10 bit coding for downlink) |
Instrument mass | 18.5 kg (including video electronics mass memory and payload internal harness). The camera has a mass of 13 kg. |
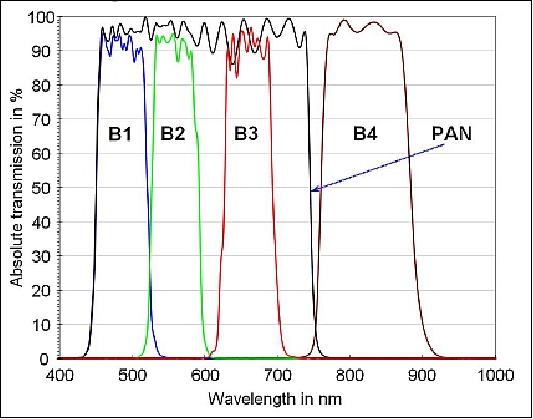
The optical filtering is ensured by highly integrated filters, including masks to minimize spectral cross-talk. The filters feature high band transmission, and sharp spectral band edges as illustrated in Figure 21.
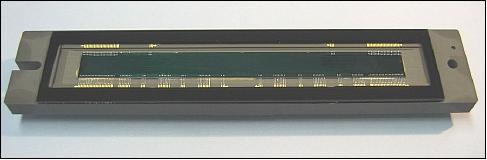
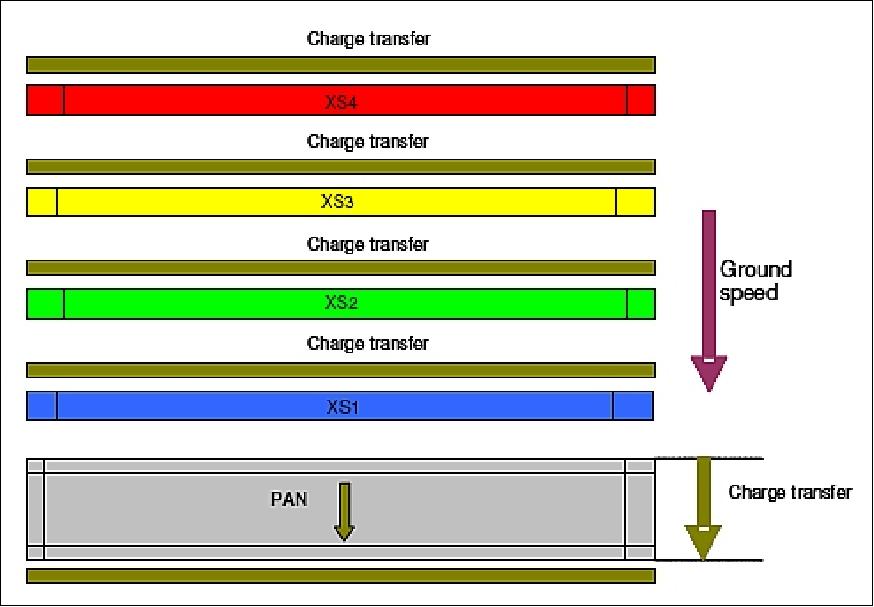
The FPA (Focal Plane Assembly) of the Pan and MS bands represent the heart of the detection chain (Figures 19 and 24). The FPA was developed by e2v (UK) offering an unrivalled level of integration and performances. All the stringent constraints of dynamic range optimization and power consumption reduction have been mastered with < 1 watt detector dissipation.
The space qualified focal plane includes one TDI array of 7000 pixels for the panchromatic band and four lines of 1750 pixels for the MS (multispectral) bands. Antiblooming functions are adjustable via specific commands. The very good detector characteristics (high MTF and high quantum efficiency) significantly contribute to the instrument optical performance.
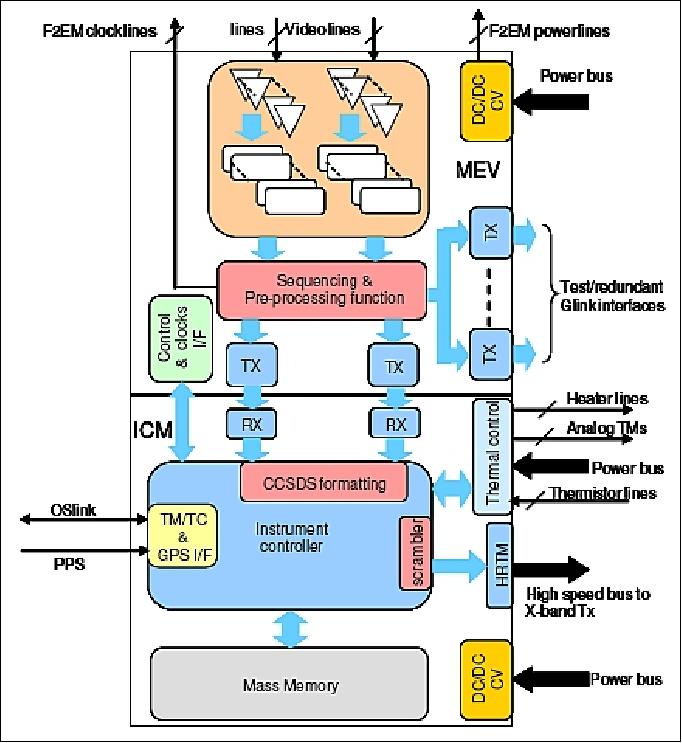
The MEV is the backend part of the NAOMI detection electronics. The MEV provides the F2EM with the primary power supplies and clocks necessary to front-end operation. The video signal from the F2EM is received, adapted and digitally converted to 12 bit in the MEV. The resulting data, rounded down to 10 useful bit, are then transmitted to the digital functions of the NIEU to be real-time processed and stored into the mass memory for downlinking during a station pass.
The NIEU represents the core of the electrical architecture. It consists of two main parts:
• the MEV is in charge of frontend operation, video processing, A/D conversion and transmission to the ICM via very high-speed digital link
• the ICM (Interface Control Module) encompasses the 64 Gbit mass memory and related FPGA (Floating Point Gate Array) based digital electronics and all the NAOMI housekeeping functions.
References
1) EADS Astrium To Supply Algeria's AlSat-2 Optical Observation System," Space Daily, Feb. 2, 2006, URL: http://www.spacedaily.com/reports/EADS_Astrium_To_Supply
_Algerias_ALSAT_2_Optical_Observation_System.html
2) P. B. de Selding, "Algeria Buys Two Small Remote Sensing Satellites - EADS To Train 25 Algerian Aerospace Engineers," Space News, Feb. 6, 2006
3) M. Bekhti, "Algeria's Space Program for the Sustainable Development," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.1.04
4) Dominique. Pawlak, Thomas Schirmann, "The New Generation of Astrium Earth Observation Optical Systems," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
5) Gilles Maquet, "Cooperation Between Space Industry in Established and Emerging Space Nations," STSC (Scientific and Technical Subcommittee), UNOOSA (United Nations Office for Outer Space Affairs), Vienna, Austria, Feb. 11-22, 2008, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2008/symp-05.pdf
6) G. Limouzin, H. Lambert, "The EADS Astrium AstroSat Product Line - A New Generation of High Resolution Small and Micro Satellites Embarking Innovative Technologies," Proceedings of the Asian Space Conference 2007, Nanyang Technological University (NTU), Singapore, March 21-23, 2007
7) Guy Limouzin, Michel Siguier, Abdelwahab Chikouche, "AlSat-2 Program - Overview, 1 year from launch," International Workshop on Earth Observation Small Satellites for Remote Sensing Applications, Kuala Lumpur, Malaysia, Nov.23-27, 2007, URL: http://seminar.spaceutm.edu.my/eoss2007/Material/
Session6/Presenter/07-11-26%20GL%20Alsat%20Presentation.PDF
8) Charles Koeck, Didier Radola, "AstroSAT 100 : Microsatellite solution for high resolution remote sensing systems," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B4.4.4
9) http://www.isro.org/pslv-c15/pdf/CARTOSAT-2B-brochure.pdf
10) "US clears launch of Algerian satellites atop Indian rocket," Geospatial Today, Aug. 12, 2009, URL: http://geospatialtoday.com/gst/index.php?option=com_content&view
=article&id=181%3Aus-clears-launch-of-
algerian-satellites-atop-indian-rocket&catid=43
%3Apress-releases&Itemid=100
11) "Launch of PLSV-C15 rescheduled," April 29, 2010, URL: http://www.isro.org/pressrelease/scripts/pressreleasein.aspx?Apr29_2010
12) https://web.archive.org/web/20161219040448/http://www.utias-sfl.net/NLS-6/
13) "PSLV-C35 / SCATSAT-1, ISRO, Sept. 26, 2016, URL: http://www.isro.gov.in/launcher/pslv-c35-scatsat-1
14) "PISAT nanosatellite ready for space launch in July 2016," PES News, April 20, 2016, URL: http://news.pes.edu/pisat-nanosatellite-ready-for-space-launch-in-july-2016/
15) "SSTL announces successful launch of AlSat-1B," SSTL, Sept. 26, 2016, URL: https://www.sstl.co.uk/media-hub/latest-news/2016/sstl-announces-successful-launch-of-alsat-1b
16) "Successful launch of ALSAT 2B completes Airbus Defence and Space's ALSAT Program," Airbus DS, Sept. 27, 2016, URL: https://airbusdefenceandspace.com/newsroom/news-and-
features/successful-launch-of-alsat-2b-completes-
airbus-defence-and-spaces-alsat-programme/
17) Haider Benzeniar, "The ALSAT-2B Gyrostellar Estimator: 2 years In-Orbit Performance," 12th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, 06-10 May 2019
18) Haider Benzeniar, Mohammed Amine Meghabber, "Reaction Wheels on a Pyramid Configuration 6 years In-orbit Results from AlSat-2A Remote Sensing Satellite," Proceedings of the 11th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 24-28, 2017, paper: IAA-B11-1403
19) Satellite AlSat-2B," WMO OSCAR, Dec. 15, 2016, URL: https://www.wmo-sat.info/oscar/satellites/view/10
20) T. Iftene, "Major Risks Management using Space Tools: The Algerian experience," 52nd session of the Scientific and Technical Subcommittee, UNOOSA (United Nations Office for Outer Affairs), Vienna, Austria, Feb. 2-13, 2015, URL: http://www.unoosa.org/pdf/pres/stsc2015/tech-01E.pdf
21) Information provided by Philippe Luquet, NAOMI Product Line Manager, EADS Astrium SAS, Toulouse, France
22) Issam Boukerch, Mohammed Hadied, Redouane Mahmoudi, Bachir Takarli, Kamel Hasni, "Rigorous geometrical modeling of ALSAT-2A Algerian satellite", Proceedings of SPIE, 'Sensors, Systems, and Next-Generation Satellites XVI, 85331V,' Vol. 8533, Nov. 19, 2012, Conference date: Sept. 24-27, 2012, Edinburgh, UK, doi:10.1117/12.974613
23) M. Kameche, N. Bouanani, F. Derghal, H. Henna, "AlSat-2A Mission: Experience of two years of operations," 23 rd ISSFD (International Symposium on Space Flight Dynamics), Pasadena, CA, USA, Oct. 29-Nov. 2, 2012, URL: https://issfd.jpl.nasa.gov/home/assets/papers/ISSFD23_PS_4.pdf
24) "Algerian President inaugurates satellite center," URL: http://www.geoconnexion.com/news/algerian-
president-inaugurates-satellite-center
25) "Alsat-2A: 1 year old, 2.5m resolution imagery of extremely high quality," EADS Astrium, July 13, 2011, URL: https://web.archive.org/web/20110807090453/http://www.astrium.eads.net/en/news2/alsat-2a-1-year-old.html
26) T. Iftene, "ALSAT-2 Système spatial d'observation de la terre à haute résolution," STSC (Scientific and Technical Subcommittee): 2011 Forty-eighth session, UNOOSA (United Nations Office for Outer Space Affairs), Vienna, Austria, Feb. 7-18, 2011, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2011/tech-06.pdf
27) Mohamed Kameche, A. H. Gicquel, D.. Joalland, "AlSat-2A Transfer and First Year Operations," 22nd International Symposium on Space Flight Dynamics (ISSFD), Feb. 28 - March 4, 2011, Sao Jose dos Campos, SP, Brazil, URL: http://www.issfd22.inpe.br/S14-Flight.Dynamic
s.Operations.2-FDOP2/S14_P2_ISSFD22_PF_014.pdf
28) Eric Maliet, Laure Brooker, Dominique Pawlak, "Global High Resolution Imaging for new Markets," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.2.7
29) P. Luquet, A. Chikouche, A. B Benbouzid, J. J Arnoux, E. Chinal, C Massol, P. Rouchit(1), S. de Zotti, "NAOMI instrument: a product line of compact & versatile cameras designed for high resolution missions in Earth observation," Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008,
30) Information provided by Hervé Lambert of EADS Astrium SAS, Toulouse, France
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top