ANDE (Atmospheric Neutral Density Experiment)
EO
Mission complete
Communications
NRL
Quick facts
Overview
| Mission type | EO |
| Agency | NRL |
| Mission status | Mission complete |
| Launch date | 10 Dec 2006 |
| End of life date | 08 May 2008 |
| Instrument type | Communications |
| CEOS EO Handbook | See ANDE (Atmospheric Neutral Density Experiment) summary |
ANDE (Atmospheric Neutral Density Experiment)
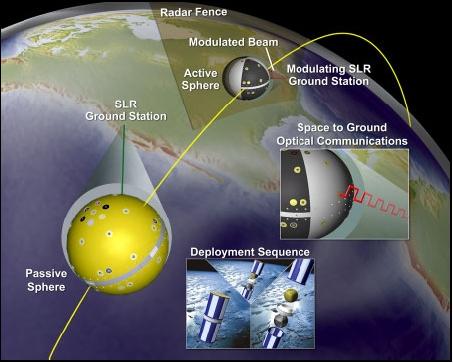
ANDE is a low-cost mission of NRL (Naval Research Laboratory) to demonstrate a method to monitor the thermospheric neutral density at an altitude of about 400 km. The primary mission objective is to provide total neutral density along the orbit (between ~ 400-100 km) for improved orbit determination of resident space objects. The mission serves also as a demonstration platform for a new space-to-ground optical communications system called MODRAS (Modulating Retroreflector Array in Space). 1) 2) 3) 4)
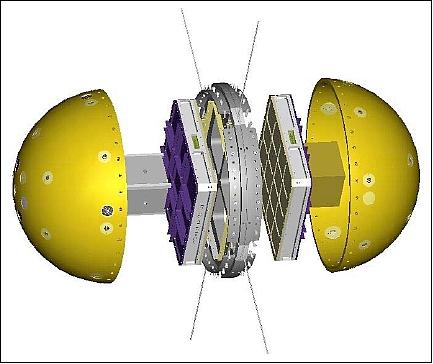
The ANDE experiment consists of two spherical microsatellites, called MAA (Mock ANDE Active) spacecraft and FCal (Fence Calibration) spacecraft. These satellites are launched from the Space Shuttle cargo bay into a near-circular orbit just below the International Space Station altitude. The two microsatellites will be contained inside the ICU (Internal Cargo Unit) canister. Once the ICU canister is a safe distance from the Space Shuttle, the two microsatellites will be released at an altitude of 350-400 km into a into a mutual orbital plane.
Each of the two spherical spacecraft are fitted with 30 optical retroreflectors for SLR (Satellite Laser Ranging) tracking. One spacecraft is passive, the other carries three active instruments:
• A miniature Wind And Temperature Spectrometer (WATS) to measure atmospheric composition, cross-track winds and neutral temperature
• A GPS receiver
• TMS (Thermal Monitoring System) to monitor the temperature of the sphere.
Background: ANDE is part of the DoD Space Test Program, referred to as STP-H2. Two ANDE missions, each with two satellites, will be deployed from the Space Shuttle. The first one was launched on STS-116 (Dec. 10, 2006). The second flight of ANDE, ANDE-2, was deployed from Space Shuttle flight STS-127 Endeavour (July 15 -31, 2009, 16 day mission).
ANDE's particular design requirements gave way to the ANDERR (ANDE Risk Reduction) mission, which evolved from the desire to test the new deployment technique on Shuttle prior to the main ANDE mission. The first set of satellites are flying on the ANDERR mission. 5) 6)
During the ANDERR mission, the MAA satellite will be used primarily as a technology demonstration and pathfinder mission. It will also be used as a proof-of-concept for a spherical antenna system being developed by the US Naval Academy (USNA), and act as a pathfinder to determine conditions for space-based optical communications, such as the NRL-developed MODRAS experiment. The MAA satellite will be added to the amateur radio satellite network used globally by ham radio operators. Subassemblies of the MAA satellite are being used to educate the midshipmen at the USNA (Annapolis, MD) in the design, analysis, fabrication, and testing of spaceflight hardware.
Project ANDE is a cooperative effort, involving the following participants: NRL, the DoD Space Test Program (STP), the Air Force Research Laboratory (AFRL), Albuquerque, NM; the USNA, Anapolis, MD; the US Air Force Academy (USAFA), Colorado Springs, CO; MEI (Muniz Engineering Inc., Houston, TX; and the StenSat Group LLC.
Each microsatellite contains a small lightweight payload designed to determine the spin rate and orientation of the satellite from on-orbit measurements and from ground-based observations. The two microsatellites will slowly separate into a lead-trail orbit to provide researchers an opportunity to study small-scale, spatial and temporal variations in drag associated with geomagnetic activity.
Launch
A launch of Shuttle flight STS-116 took place on December 10 (UTC), 2006 (ISS assembly flight 12.A.1 of Discovery, Dec. 10-22, 2006, 12 day mission). ANDERR is part of the STP-H2 payload onboard of STS-116. CAPE (Canister for All Payload Ejections), containing the ANDE, RAFT (Radar Fence Transponder) and 2 MEPSI (MEMS-based PicoSat Inspector) payloads, was ejected on Dec. 21, 2006 at 18:23:15 GMT (see CAPE description below).


ANDERR-MAA (Mock ANDE Active) satellite:
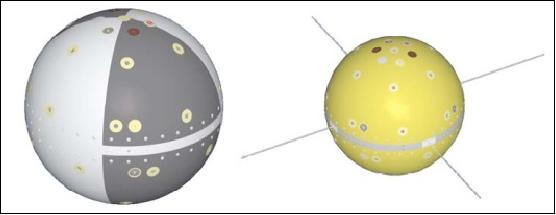
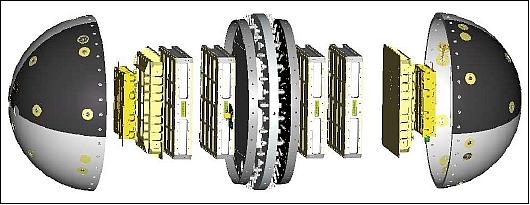
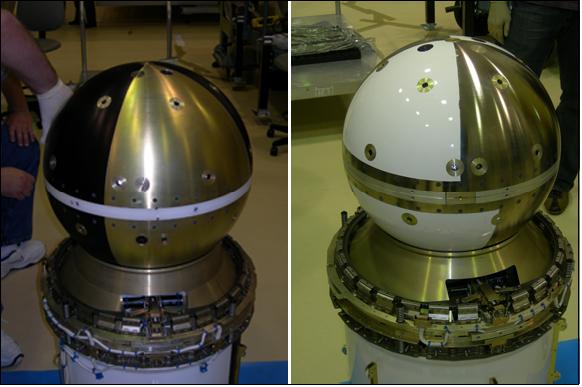
MAA is a spherical 52.04 kg satellite of 19 inches (48.26 cm) in diameter and constructed from two anodized aluminum hemispheres. The hemispheres were formed by spin-casting aluminum. They were then rough machined, heat treated, machine finished, and finally, anodized. The equator of this sphere was constructed from an engineered polymer material (Delrin) which provides a non-conductive separator between the hemispheres. This allows the satellite's shell to perform as a dipole antenna for the communications system developed at the USNA. The communications system is powered by four battery boxes, which gives the satellite an estimated lifetime of about 1.5 years. The payload is split into the two hemispheres, with two battery banks, a communications box, and the laser driver box stacked in a vertical configuration (the communication system is described separately below).
The MAA sphere is painted with a pattern of four 90º longitudinal segments, alternating bare black anodized aluminum and gloss white paint (Aeroglaze A276). The purpose of this paint scheme is twofold; to provide an easy visual pattern for observing the initial spin rate and orientation, and to provide a means to determine spin rate and orientation from the polarization return to be observed from the Air Force Maui Optical and Supercomputing (AMOS) facility.
Onboard instrumentation for the MAA satellite consists of a set of six CIGS (Copper Indium Gallium Diselenide) photovoltaic cells that are mounted flush with the surface of the sphere. These light sensors are located at the end-points of three nearly orthogonal axes and are used for attitude and spin rate determination (they do not recharge the power subsystem). Thermistors are placed at several points within the satellite to monitor the temperature of the various components of the satellite. The temperature and photovoltaic voltage values are telemetered to the ground by a ”heartbeat” communications system (digipeater) that activates for 2 seconds out of every 20 seconds. If a ground station is detected, the data are transmitted; if not, the system returns to a sleep cycle for another 20 seconds. A set of six laser diodes, also located at the end-points of three nearly orthogonal axes, are programmed to turn ”on” during passes over Maui. These diodes emit light at 810 nm, which will be observed from the AMOS facility.
The laser diode system was designed and built at AFRL. Outputs from six pulsed laser diodes (810 nm, 500 mW each) will be transmitted via fiber optics to the ends of three nearly orthogonal axes on the sphere. The transmit apertures will be formed simply by the cleaved ends of the 50 µm core of the fibers, which will form beams with a full-angle divergence of ~ 10º. The ends of the fibers are inserted through holes in the sphere. The fibers are being secured with standard fiber couplers. The diodes are being pulsed at six unique rates (0.5 Hz, 0.75 Hz, 1.25 Hz, 1.75 Hz, 2.75 Hz, and 3.25 Hz) so that at the expected spin rate, of 1-10 rpm, it will be possible to identify which beacon is oriented directly toward the observer.
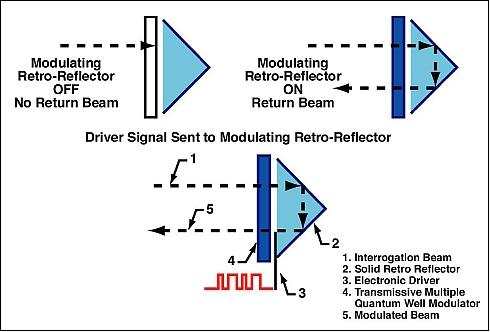
MODRAS (Modulating Retroreflector Array in Space): A design requirement of the active satellite (MAA) is to telemeter the data to the ground without external protrusions from the spherical spacecraft (i.e. an antenna). Instead of an antenna, MODRAS is installed on MAA consisting of a set of modulating retroreflectors coupled with an electronics package, capable to telemeter data to the ground by modulating and reflecting the SLR laser interrogation beam. Hence, MODRAS, developed by NRL, is a science enabling technology as it allows for a larger communications bandwidth without sacrificing the spherical geometry of the spacecraft. The MODRAS experiment has a tight operational temperature range. Thermal balancing will be achieved via rotation of the spacecraft.
The optical retroreflector concept returns photons back along their original angle of incidence. The MODRAS system consists of a set of multiple quantum well (MQW) modulating retroreflectors coupled with an electronics package, which will telemeter data to the ground by modulating the reflected light from the laser interrogation beam of the ground station.
For the MODRAS experiment, the FOV (Field of View) of the mounted device is on the order of 45º FWHM (Full Width Half Maximum) with an operational wavelength of 1.05 µm. One hemisphere of the active sphere is fitted with an array of these devices customized at 1.05 µm. The devices are situated about the sphere in a cluster at the top and singly at near-cardinal points on the sphere. This non-uniform distribution will enable differentiation of scintillation effects from partial coherence effects on the returned data stream. The system's nominal data transmission rate will be 10 kbit/s with test modes of up to 1 Mbit/s. Through unique coding of each device, the illuminated modulating retroreflector in the returned data stream can be identified enabling determination of orientation and other parameters.
Parameter | MAA (active) | FCal (passive) |
Primary objectives | Determine total atmospheric density in orbital plane | |
Primary SLR applications | Precision orbit determination | |
COSPAR ID | 0605506 | 0605510 |
Launch date | Dec. 21, 2006 (ejection from Shuttle and CAPE) | |
Sphere diameter | 48.26 cm (19 inch) | 44.8 cm (17.5 inch) |
Sphere mass | 52.04 kg | 62.7 kg |
Retroreflector array (RRA) | 30 corner cubes | 30 corner cubes |
RRA shape | sphere | sphere |
RRA diameter | 12.7 mm | 12.7 mm |
Expected orbital life | 1-3 years | 1 year |
Sensor Complement
ANDERR-FCal (Fence Calibration) Passive Satellite
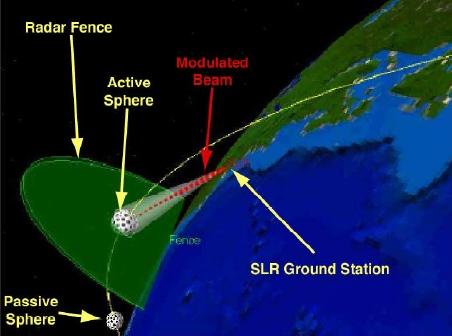
The ANDERR-FCal satellite is a sphere of 17.5 inch (44.8 cm) in diameter with a mass of 75 kg. Its name is derived from its intended use as a calibration target for the radar fence, a space surveillance system operated by the Air Force 20th Space Control Squadron [dual use of FCal: a) in the context of ANDERR and b) in the context of a radar calibration target].
The size requirement of FCal satellite was determined by the resonant frequency of the Navy radar fence. The two hemispheres are fabricated by spin-casting brass, followed by machine finishing. The exterior of each hemisphere is nickel coated for durability in the harsh space environment. The equator consists of an anodized aluminum deck that incorporates an antennae deployment system, and mounting locations for the FCal payload. A CubeSat ballast mass is included for center of gravity symmetry.
The FCal satellite interior contains a CubeSat as its payload which is simply used to store the FCal experiments like shelves in a cabinet. The CubeSat is a 10 cm3 picosatellite originally designed as an educational platform. It is in fact a fully functional satellite with solar power (not used in FCal), battery power, a computer, and a communications subsystem. It can accommodate small payloads in the internally available space. The CubeSat in FCal was developed by Ivan Galysh, a member of the StenSat Group LLC, working for NRL.
The goal of the structural design is to minimize the mass of the CubeSat while providing a robust structure that can survive launch stresses. The structure is highly integrated with the electronics; the electronic circuit boards are part of the structure. The assembly is fabricated from 6061-T3 aluminum. The CubeSat core consists of a stack of eight circuit boards on 11 mm centers. Board-to-board connections are by means of surface mount high density connectors on the top and bottom of each board. Since the only inter-board communication is via these connectors, otherwise empty slots must be populated with a blank feed-through board (Figure 8).
For the FCal, the CubeSat structure is used with minimal modifications. Normally, the CubeSat has solar panels on all faces. Each face includes a temperature sensor and a light sensor. The sensor functions are needed on the FCal without the solar cells. The same sensor interface circuit is used for the sensor modules on FCal. A board is designed to mount on the ANDE universal mounting system. The sensors detect light levels for determining the orientation of the satellite and temperature.
The processor board houses a Microchip PIC16C77 processor. It is an 8-bit single chip computer with built-in program memory, data memory, and various interfaces. The processor board performs the communications modulation with an AFSK encoder using the MX614 IC. The processor board generates the AX.25 protocol telemetry and routes the bit stream to the MX614 for the modulation. The modulated signal is routed to the communications board. The CM8870 decodes DTMF tones and generates a 4-bit pattern, which is interpreted by the processor. The processor board controls the operations of the satellite. It controls the transmitter power. The processor board stimulates the watchdog timer located on the power board.

The communications board contains a transmitter and receiver. The transmitter operates at 436.81 MHz (UHF). The transmitter is an FM transmitter consisting of an exciter and power amplifier. The exciter is crystal controlled and has a modulation input port for an audio signal or AFSK signal. The output level of the exciter is 10 mW. The exciter output is connected to the amplifier circuit. The amplifier is a single IC device capable of a maximum of 800 mW output. The output level is adjustable and has been set to 250 mW. The output of the amplifier is single ended with a low pass filter. It is routed to splitters with a 180º phase shift between the two outputs. The outputs are routed via coaxial cable to two antenna boards on opposite sides of the FCal equator.
The CubeSat power board was redesigned to support the FCal battery configuration, which uses two battery banks identical to the MAA battery banks. Originally, the CubeSat power board provided voltages from 3-5 V. The FCal battery configuration provides 9-15 V. The power board contains high efficiency power converters to reduce the voltage to 3.2 V with an efficiency of about 85%. The power board contains the satellite watchdog circuit, which will cycle power to the whole satellite if the processor suffers a single event upset. Onboard diagnostics capabilities have been included which do not require operation of the processor board. The processor board includes an eight channel analog-to-digital converter which allows the monitoring of the power converters, the batteries, and current draw of the satellite.
FCal operation: When the FCal is deployed, the processor boots and initializes all the satellite components. It then waits one minute and deploys the antennas one at a time. There is a one second delay between the deployment of each antenna. Once deployed, the satellite starts monitoring all the sensors and internal parameters and transmits the telemetry once every two minutes. The satellite can accept commands during this period. The telemetry transmission interval can be set and the receiver audio can be routed to the transmitter to turn the satellite into a transponder. Telemetry data includes voltage and temperature from each of the six phototransistors, battery and power data, and internal temperature data. The purpose of the telemetry is to determine if the FCal is spinning and at what rate and orientation.
CAPE (Canister for All Payload Ejections)
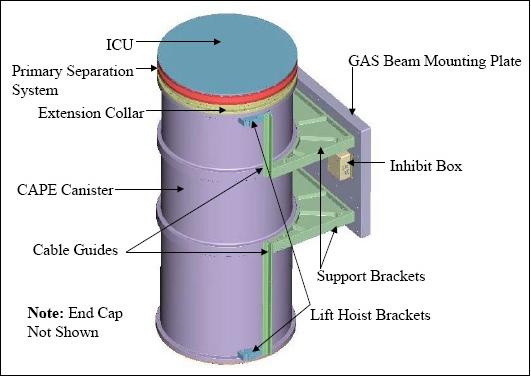
Since no existing ejection system could deploy satellites of this design, the STP program funded a new deployment system to meet mission requirements of ANDERR and ANDE (development by Muniz Engineering, Inc.). CAPE will be used for this mission as well as other future DoD missions. The objective of CAPE is to insert both satellites into orbit nearly simultaneously (without changing the spherical envelope of the spacecraft) - giving one spacecraft a spin of 1-10 rpm.
CAPE is a cylinder tube, an envelope of 53 cm in diameter and 135 cm in length, that holds the ICU (Internal Cargo Unit) for the two microsatellites. The ICU is a payload interface mechanism that serves as the unique payload carrier, totally enveloping the payload. The ICU-to-CAPE interface is the primary separation system for ejecting the ICU from the CAPE canister. The entire volume can be used to hold a payload, without affecting the ejection parameters of the CAPE system.
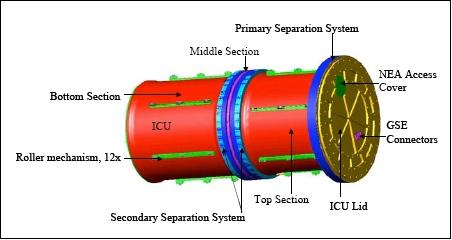
The ICU is a container that is attached to the CAPE via a LightbandTM separation system of Planetary Systems Corporation. The ICU allows both spacecraft to be ejected from the Orbiter at the same time while having no traditional mechanical interface to the spheres. The ICU is a three segment device consisting of bottom, middle and top sections. The sections are held together by two secondary separation systems, also LightbandTM separation devices.
Upon activation the ICU is deployed from the cargo bay with an ejection velocity of at least 0.5 m/s. Timers within the ICU are initiated as the ICU separates from the CAPE. The system employs a pivot point to induce a spin of 1 to 10 rpm on one of the spacecraft. The rotation rates of the ANDERR-MAA spacecraft must be known with some confidence in order to model the operation environment for the MODRAS experiment. Since it is not known what exact rotation rate will be induced by the deployment from the CAPE, an important goal of the ANDERR flight is to determine the rotation rate.
Several methods will be used to determine the rotation rate and orientation of the ANDERR-MAA sphere as a function of time.
• An astronaut will acquire video and still images of the deployment through a window on the Space Shuttle, providing a visual record of the initial rotation and orientation
• Six photovoltaic cells, at opposite ends of three nearly orthogonal axes, will provide different voltages based on their orientation relative to exposure to solar illumination, Earthshine, and deep space. Thus, the temporal variation in the solar cell outputs will provide a time history of the ANDERR-MAA spacecraft orientation relative to the sun.
• In addition, the deployment has been requested to be done within sight (in terminator) of the AF Maui Optical and Supercomputing (AMOS) facility. On successive passes over Maui, signals from the six onboard laser diode beacons (810 nm) will be received at the AMOS facility and used to deduce the sphere spin rate and orientation.
• Ground-based observations of glints from sunlight reflections of the front surface of the retroreflectors may also be used to determine the spin rate of the spacecraft.
• Finally, the MAA sphere will have a pattern of several longitudinal segments, with alternating surface materials. Thus, when the sphere is illuminated by a laser beam from AMOS, variations in the light returned to detectors at AMOS will be used to determine the sphere's rotational motion.
Orbit: circular, non sun-synchronous orbit, initial altitude of ANDE = 236 km, inclination = 51.6º. See Figures 2 and 3 documenting the deployment of ANDE from Shuttle Discovery.
Note: Aside from ANDE, CAPE on STS-116 contained another free-flyer payload, namely RAFT (Radar Fence Transponder), a system of 2 CubeSats developed by students of the USNA (US Naval Academy), Annapolis, MD. The objective of RAFT is to demonstrate self-location techniques and to calibrate the US Space Surveillance Network's (SSN) radar fence (the SSN is across the southern USA). As one RAFT picosat flies through the radar fence, it will transmit its location. When the second picosat flies through the radar fence, it exercises the radar fence's locating capability (users will hear a 1 second ping when it flies through the fence). This effort will improve the SSN's ability to track small Resident Space Objects. In addition, the ANDE and RAFT satellites carry amateur radio communications payloads. 7)
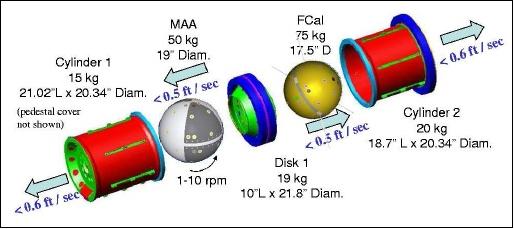
There were a total of 5 components deployed as an Internal Cargo Unit (ICU) from the NASA STS-116 Discovery flight as shown in Figure 11. The ICU of 5 components (Cylinder 1, MAA, Disk 1, FCAL, and Cylinder 2) separated about 40 seconds later under spring forces. Only the spherical objects MAA and FCAL have retro reflectors in a spherical configuration of these five objects. Under nominal deployment conditions, will be spinning at 5 rpm and the FCAL will be negligible; however, the deployment resulted in a negligable spin to both spacecraft. 8)
After CAPE deployment, both ANDE satellites will be tracked by the global SLR (Satellite Laser Ranging) network and the SSN; the tracking data are being used for POD (Precise Orbit Determination) analysis. The data are also being used to compute the total atmospheric density and validate drag coefficient models.
The ILRS (International Laser Ranging Service) nomenclature for the MAA and FCAL will be ANDERRA (Active) and ANDERRP (Passive) for the CPF prediction names. While both have active RF transmitters sending measurements to the ground, this naming convention is consistent with the laser diode sources on the MAA.
The FCal satellite is different from the MAA satellite in size, mass, finish, and payload. The size and mass differences will cause the satellites to separate over time into a lead-trail orbit as the atmospheric drag causes a greater retardation of the larger and less massive MAA sphere. - Consequently, the greater mass of the FCal sphere will enable it to have a longer lifetime before reentry, two years as compared to one year. By having two co-planar satellites in orbit, the tracking data obtained can gain a better understanding of the geographic and temporal variations of the local atmospheric density at these altitudes.
ANDERR-MAA Backup RF Communication System
The USNA (US Naval Academy) has been given the opportunity to construct a backup digital communications transponder located inside the MAA sphere. The system may be used by the global AMSAT community to capture telemetry data from ANDERR-MAA satellite. 9)
The MAA RF communications system features two AX.25 packet command and telemetry strings (A and B) of PCSat heritage (launch of PCSat on Sept. 30, 2001). The primary system provides telemetry in VHF at a frequency of 145.825 MHz. The outer shell of the MAA sphere functions as the RF system antenna for both communication strings.
The communication system design supports the text messaging and APRS (Automatic Position Reporting System) services (APRS digipeater) for mobile transceivers and hand¿held receivers in the ground system. Each string has several common telemetry parameters and a few items that are unique to each string.
To save power, both strings sleep for ~90% of the time. The A string wakes for 1.5 s out of every 15 s, and the B string wakes for 1.5 s once per minute. If either string detects activity, it will remain awake for a minute since the last signal detected.
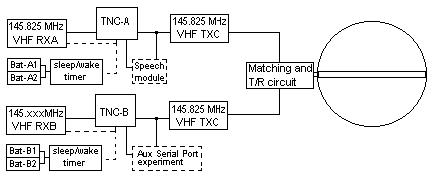
The communications system hardware consists of a Kantronics KPC-3+ TNC, a Hamtronics transmitter and receiver and a custom interface board to hook it all together. These are all mounted in a box on top of the battery boxes (of 2.5 cm height).
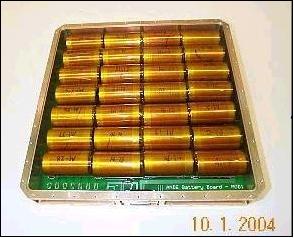
Power subsystem: Communication power is provided by a Li-ion battery system, consisting of 112 ”D” cell Lithium thionylchloride cells arranged in 4 packs of 7 strings of 4 cells in series. The requirements call for an operational service provision of 1 1/2 years.
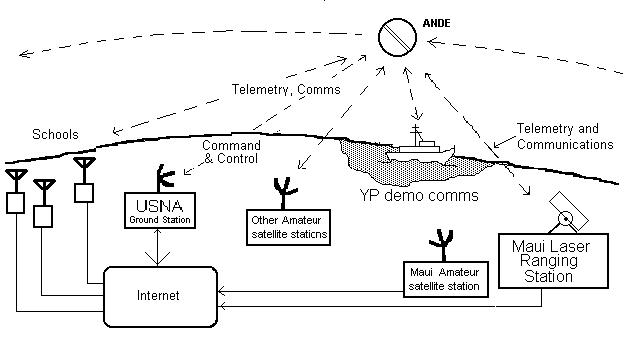
Since ANDE has no onboard computer for whole-orbit telemetry capture, the project is dependent on volunteer ham radio ground stations for telemetry feeds to the APRS (Automatic Position Reporting System) Internet system for live distribution.
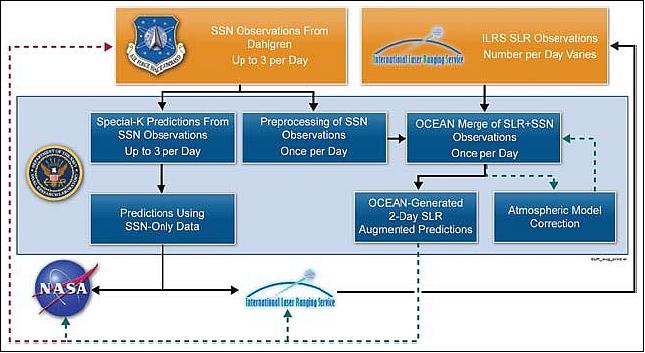
ANDE data flow: The 20th Space Control Squadron, USAF, in Dahlgren, Virginia, processes the SSN (Space Surveillance Network) radar observation data of the ANDERR spacecraft. The product is a set of orbital state vectors and corresponding radar observations, which is provided to NRL up to three times a day. These state vectors are processed at NRL using Special-K orbit determination software to produce a set of ephemerides. These ephemeris files are reformatted into the consolidated prediction format used by the ILRS (International Laser Ranging Service) tracking stations. A set of predictions is also computed once per day using the NRL OCEAN (Orbit Covariance Estimation and Analysis) orbit determination code. The radar observation data are merged with the SLR (Satellite Laser Ranging) observation data and processed by OCEAN to generate a 2-day augmented set of predictions that includes the atmospheric correction. 10)
Mission Status
• The primary mission objective was to test the deployment mechanism from the Shuttle for the projected ANDE-2 flight in mid 2009. Scientific objectives of the ANDE risk reduction flight include: monitor total neutral density along the orbit for improved orbit determination of resident space objects, monitor the spin rate and orientation of the spacecraft, and provide a test object for polarimetry studies. 11) 12)
• On May 8, 2008, the FCal (ANDERRP - passive) spacecraft reentered the atmosphere. 13)
• On Dec. 25, 2007 the MAA (ANDERRA - active) spacecraft reentered the atmosphere.
• SLR observations: The ILRS (International Laser Ranging Service) performed satellite laser ranging observations of the ANDERR spacecraft. On April 16, 2007, satellite laser ranging data was acquired from the ILRS site located in Graz, Austria, as shown in Figure 18. The data shows 4 retro reflectors coming into and out of view over a 3 minute 33 second period. An analysis of the spacing between each retro’s closest approaches (valley of the “V”) determined that the observations had spacings of .892, 1.0, and .788 (normalized to the longest span). A comparison with mechanical data of the MAA spacecraft revealed that these normalized spacing (1.0) corresponded with physical dimension of 19.91cm. During the SLR observations it took 51 seconds to rotate through that distance, resulting in a rate of 0.12 rpm. However, during the pass the aspect angle to the spacecraft changed in azimuth by about 135°, resulting in an adjustment of 0.09 rpm. This adjustment should be added to or subtracted from the actual spacecraft spin rate to get the observed spin rate of 0.12 rpm. 14)
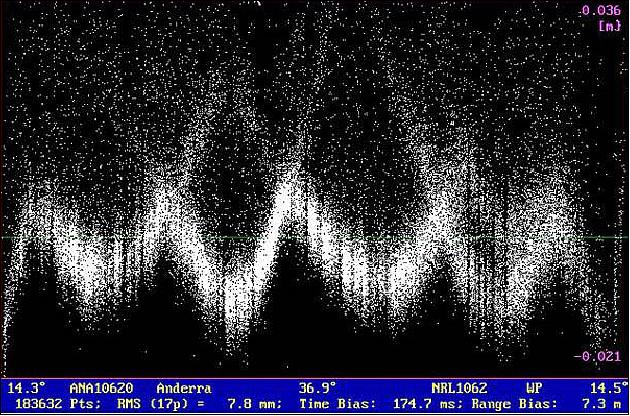
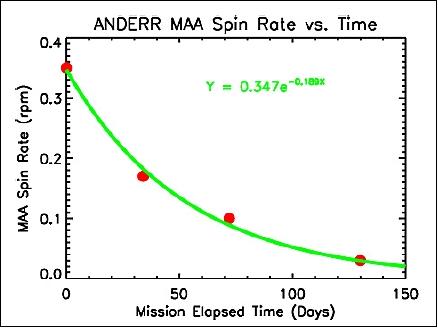
As a result, depending on the direction of spin posigrade or retrograde, the actual spacecraft rotation rate would appear to be bounded on the upper end by 0.21 rpm and on the lower end of 0.03 rpm. The project assumed the latter, since it is doubtful that ANDERR MAA could actually speed up its spin in orbit above the January 24th and March 3rd observations of 0.17 and 0.10, respectively, and would more likely continue to slow down due to the internal liquid electrolyte absorbing spin energy.
The four independent measures of the MAA spin rate were plotted versus mission elapsed time in days and fit with an exponential function. The results are shown in Figure 11, with a decay constant of -0.189.
• ANDE was successfully deployed on December 21, 2006 at 18:23:15 GMT. First contact was made with FCAL on December 21, 2006 at 19:13:15 GMT and first contact was made with MAA on December 21, 2006 at 22:02:55 GMT. As observed in the downlink video, the CAPE/ICU ejection event went flawlessly. 15)
• The Orbiter payload bay D-camera was trained on the ICU separation event for at least 8 minutes, at a STP real-time request, which is twice the time asked for preflight. First contact was made with MAA from a ground station in Annapolis, Maryland, on December 21, at 22:02:55 GMT, or about 3 hrs 40 minutes following deployment.
• STP (Space Test Program) received confirmation from Cheyenne Mountain approximately 29 hours following deployment that 5 objects were being tracked from the ICU/ANDE deployment, further supporting the accomplished separation of the ANDE spheres from the ICU cylinder. Although the spin rate of the MAA sphere was unconfirmed for a long time following deployment, STP received information from the PI on February 6, 2007 that a laser ranging site in Austria determined that the MAA is spinning at 2.8 rev/min.
• The ANDE experiment deployment was approximately 95% successful on this mission. All ICU and ANDE pieces separated and ground station communications with both FCal and MAA spheres was successful. Although the MAA sphere did not visibly separate from the ICU cylinder in the video of the deployment, evidence showed that it did eventually emerge a short time later. This is based on radar tracking data and communication with the MAA satellite, and photos taken from the Orbiter approximately 31 minutes following deploy that shows the MAA sphere as separate or separating from the cylinder.
• The two MEPSI tethered picosats, one with propulsion (inspector) to fly around the other (target), were deployed on December 21, 2006 at 00:19:49 GMT.
• Since the picosats both have radios and cameras, first post-deployment contact was made on December 21, 2006 at approximately 00:45 GMT. The MEPSI picosat cameras took pictures of the Shuttle, other picosat and space. Since a slight rotation was imparted to both picosats and there were multiple cameras, several views of the shuttle payload bay and wings were obtained. These were downlinked to the ground at the first opportunity, relayed to the control center and uplinked to the shuttle crew within one hour of the MEPSI deployment.
• MEPSI successfully provided proof-of-concept for the capability of on-board “InfoBot” (< 2kg) to provide visual inspection, servicing, and protection to a host satellite.
• The RAFT picosatellites were successfully deployed on December 21, 2006 at 01:56:43 GMT. RAFT consisted of two picosats, MARSCom, having an active transmitter for the radar fence, and RAFT1, a passive target. MARSCom actively “pinged” the fence frequency, while RAFT1 was silent at the fence frequency. First post-deployment contact made with the RAFT1 picosat was on December 21, 2006 at 02:22:42 GMT.
The two ANDERR spacecraft (MAA and FCal) were useful calibration targets due to their well-characterized size and shape. The SLR (Satellite Laser Ranging) observations performed by the members of the ILRS (International Laser Ranging Service) have been used to augment the radar data to constrain the accuracy and stability of the estimated ballistic coefficient and to assess the accuracy of the predictions with absolute confidence. The data show a consistent over estimation of the density by the atmospheric models, NRLMSISE 2000 as well as J70.
References
1) A. C. Nicholas, G. C. Gilbreath, S. E. Thonnard, R. Kessel, R. Lucke, C. P. Sillman, “The Atmospheric Neutral Density Experiment (ANDE) And Modulating Retroreflector In Space (MODRAS): Combined Flight Experiments For The Space Test Program,” Proceedings of SPIE, `Optics in Atmospheric Propagation and Adaptive Systems V,' Anton Kohnle, John D. Gonglewski, Editors, Vol. 4884, 2003, pp. 49-58, URL: http://cddis.nasa.gov/lw13/docs/papers/target_nicholas_1m.pdf
2) http://www.nrl.navy.mil/pao/pressRelease.php?Y=2005&R=22-05r
3) A. Nicholas, C. Gilbreath, S. Thonnard, R. Kessel, R. Lucke, C. Sillman, C. Cox, “Atmospheric Neutral Density Experiment & Modulating Retro Array in Space,” 13th International Workshop on Laser Ranging, Oct. 10, 2002, Washington, DC, URL: http://cddis.nasa.gov/lw13/docs/presentations/target_nicholas_1p.pdf
4) P. C. Kalmanson, A. C. Nicholas, S. E. Thonnard, I. Galysh, R. Bruninga, “Design of the microsatellites used in the atmospheric neutral density experiment,” Proceedings of SPIE , Vol. 5659, `Enabling Sensor and Platform Technologies for Spaceborne Remote Sensing,' George J. Komar, Jinxue Wang, Toshiyoshi Kimura, Editors, Jan. 2005, pp. 20-33
5) A. C. Nicholas, S. E. Thonnard, I. Galysh, P. Kalmanson, B. Bruninga, H. Kelly, S. Ritterhouse, J. Engelhardt, K. Doherty, J. McGuire, D. Niemi, H. Heidt, M. R. Hallada, D. Dayton, L. Ulibarri, R. Hill, M. Gaddis, B. Cockreham, “An Overview of the ANDE Risk Reduction Flight,” http://ilrs.gsfc.nasa.gov/docs/ANDERR_paper.pdf
6) “Space Test Program-H2-Atmospheric Neutral Density Experiment (STP-H2-ANDE),” URL: http://exploration.nasa.gov/programs/station/STP-H2-ANDE.html#overview
7) http://monitor-post.blogspot.com/2006/12/sts-116-to-launch-usnadarpa-satellites.html
8) A. C. Nicholas, T. Finne, M. A. Davis, “Atmospheric Neutral Density Experiment Risk Reduction (ANDE-RR) Flight Hardware Details,” Jan. 26, 2007, URL: http://ilrs.gsfc.nasa.gov/docs/anderr_hw.pdf
9) http://www.southgatearc.org/news/december2006/ande_open_for_xmas.htm
10) A. Nicholas, T. Finne, I. Galysh, M. Davis, L. Healy, “The Atmospheric Neutral Density Experiment (ANDE),” Atmospheric Science and Technology, 2009, pp. 138-142, URL: http://www.nrl.navy.mil/content_images/09_Atmospheric_Nicholas.pdf
11) A. C. Nicholas, J. M. Picone, J. Emmert, J. DeYoung, L. Healy, L. Wasiczko, M. Davis, C. Cox, “Preliminary results from the Atmospheric Neutral Density Experiment Risk Reduction Mission,” Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Mackinac Island, MI, USA, Aug 20-24, 2007, AAS 07-265, URL: http://ilrs.gsfc.nasa.gov/docs/ANDE_AAS_07-265.pdf
12) A. C. Nicholas, S. A. Budzien, J. DeYoung, L. Healy, M. Davis, “Results from the Atmospheric Neutral Density Experiment Risk Reduction Mission,” URL: http://ccar.colorado.edu/muri/MURI%20-%20ANDE%20Results%20(Budzien).pdf
13) “ANDE-RR,” NASA/GSFC, URL: http://ilrs.gsfc.nasa.gov/satellite_missions/list_of_satellites/anra_general.html
14) A. Nicholas, G. Gilbreath, S. Thonnard, I. Galysh, L. Healy, L. Wasiczko, R. Burris, T. Finne, M. Davis, B. Buringa, D. Hall, P. Kervin, “Atmospheric Neutral Density Experiment Mission Update,” URL: http://www.amostech.com/technicalpapers/2007/poster/nicholas.pdf
15) P. G. Ballard, A. Meza, S. Ritterhouse, T. Shaffer, C. Conley, C. Taylor, D. D. DeAtkine, J. C. McLeroy, “Small Satellite Deployments From STS116 - Development Of New Manned Spaceflight Deployment Systems,” Proceedings of the 21st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 13-16, 2007, SSC07-III-1
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).