ANUSat (Anna University Satellite)
EO
Mission complete
Multi-purpose imagery (land)
Magnetic field
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Mission complete |
| Launch date | 20 Apr 2009 |
| End of life date | 18 Apr 2012 |
| Measurement domain | Gravity and Magnetic Fields |
| Measurement category | Multi-purpose imagery (land) |
| Instruments | GPS receiver |
| Instrument type | Magnetic field, Other, Communications, Data collection, Lightning sensors |
| CEOS EO Handbook | See ANUSat (Anna University Satellite) summary |
ANUSat (Anna University Satellite)
Overview Spacecraft Launch Mission Status Sensor Complement References
ANUSat is a cooperative microsatellite mission of Anna University of Chennai, Madras, India, and ISRO (Indian Space Research Organization). An ISRO initiative of microsatellite development at Indian universities was approved in January 2002 and formally announced on Feb. 18, 2002. The overall objectives are to foster interest in Earth observation and space technology among students and faculty and to provide hands-on training for all aspects of spacecraft building and operations support. Anna University is the first university in India that has taken up space technology with emphasis on microsatellite development in its university engineering curriculum. 1) 2) 3) 4)
According to the agreement, Anna University will build the microsatellite and ISRO will launch the satellite as a piggyback payload on its Polar Satellite Launch Vehicle, PSLV. The project at the university is being reviewed periodically by ISRO scientists for effective and timely implementation. A preliminary design review took place in Dec. 2002.
Spacecraft
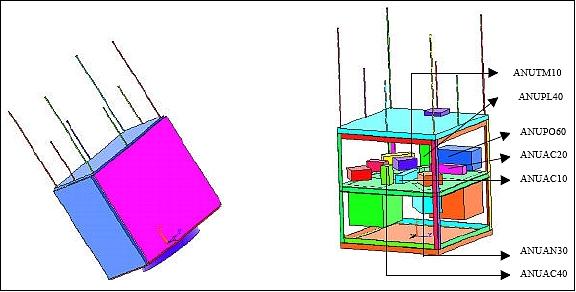
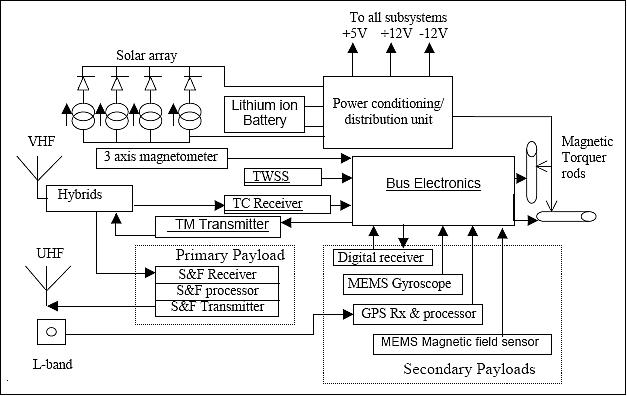
The ANUSat structure is a cuboid of side length 600 mm, consisting of an aluminum honeycomb panels/decks and CFRP solar panels. Surface-mounted solar cells (Si) are on four belly-based panels to generate 33 W of average power. A Li-ion battery is used for orbital eclipse phases (16 cell battery, 6 Ah capacity). An unregulated power bus is used power distribution (use of DC/DC convertors, bus voltage of 13-16 V).
Spin-stabilization is provided by a pair of of magnetic torquers as actuators. Attitude sensing is provided by a 3-axis magnetometer and a twin slit sun sensor (±75º range with 0.5º resolution). Passive thermal control is employed. The S/C is spin stabilized with the spin axis orientation towards orbit normal with a pointing accuracy of ±3º. The nominal spin rate is 4 rpm (±0.5). The spacecraft mass is 38 kg. 5) 6) 7)
All onboard electronics are packaged into a single electronics box, featuring a processor-based system with FPGAs in support of all required functionalities (command, telemetry, ACS, sensor signal processing, etc.).
Spacecraft mass, size | 38 kg, 600 mm x 600 mm x 600 mm |
Solar array | Body mounted GaAs solar cells generating 40 W of average power |
Battery | Lithium-ion, (4 x 4) 16 cell battery; 10 Ah capacity |
Bus voltage | 13-16 V |
Spacecraft stabilization | Spin stabilized with spin axis orientation towards orbit normal |
Spin rate | 8± 0.5 rpm (automatic SRC) |
Spin axis orientation | ±3º (autonomous SAOC) |
Sun sensor | ±75º range with 0.5º resolution for sun aspect angle |
Magnetometer | ±60,000 gamma with 500 gamma resolution |
Torquers (2) | 4.5 Am2 |

Launch
ANUSat was launched on April 20, 2009 as a secondary payload to RISAT-2 of ISRO on the PSLV-C12 vehicle (the primary payload mass of ~ 300 kg). The launch site was ISRO's SDSC (Satish Dhawan Space Center) at SHAR (Sriharikota) on the east coast of India. 8)
Note: ANUSat was planned to be launched with CartoSat-2 of ISRO (January 10, 2007). But since ANUSat was slightly behind schedule it was not able to make the flight.
Orbit: Near-circular orbit, altitude = 550 km, inclination = 41º, period of ~90 minutes.
Mission Status
• ANUSat exceeded its mission life of two years during which it successfully relayed its housekeeping data and other information to the project. After having completed more than 1,000 days in orbit, the ANUSat mission ended in April 2012. 9)
• The spacecraft and its payload are operating "nominally" in 2011 (Ref. 5).
• The spacecraft and its payload are operating "nominally" in 2010. The satellite is still performing well in its orbit, although the design life of the spacecraft is only 6 months. 10)
- Initially, the attitude control system of ANUSat was built around the assumption that the satellite would be placed into a sun synchronous orbit. In such an orbit, the angle between sun and orbit normal is almost constant and hence it was planned to have the spin axis along the orbit normal using the Bdot control law that ensures sufficient power to operate the spacecraft payloads and maintain the temperature of the satellite between 10º C – 30º C. The satellite was equipped with a set of attitude sensors namely a tri-axial magnetometer and an optical TWSS (Twin Slit Sun Sensor) to measure the spin rate and angle between Sun and the spin axis. The satellite also carries magnetic torquers to control the spin axis orientation as well as the spin rate control. Further, manual spin axis control with the quarter orbit logic was also implemented to control the spacecraft spin orientation as a backup plan.
- However, ISRO decided that ANUSat had to be launched as a co-passenger along with RISAT-2 - this entailed a drastic change in the orbital plane from sun-synchronous (i.e. near polar) to an inclined orbit of 41º. As a consequence, the new situation has created problems in maintaining the temperature of the satellite within design limits and the Bdot law could not be used for automatic control of the spacecraft spin axis. - This led to the intervention of the Flight Dynamics team from ISRO to work closely with the ANUSat team to provide ways and means to control the satellite manually in orbit.
- After launch, the initial operations phase was carried out from the Bangalore ground station. Subsequent orbit information was determined using NORAD two line elements as there was no tracking support envisaged for this satellite. This orbit information was used to predict spacecraft visibility as well as spin axis attitude orientation. To support the initial phase of operations, a spin axis attitude determination package was placed in the makeshift satellite control center positioned at Bangalore station.
- Immediately after launch into orbit, ANUSAT got separated from launch vehicle as planned and the OBC (On-board Computer) automatically started the de-tumbling operation in order to reduce the spacecraft rates in all the three axes. Following this activity, SRC (Spin Rate Control) was initiated, which spins-up the satellite along the z-axis of the spacecraft to the pre-planned rpm. The spin-up status was confirmed by telemetry from first visible orbit to the Bangalore station. - However, during the initial orbits, the magnetic torquers were active and hence, the magnetometer data was not useful for attitude determination. To reduce the time required to achieve a spin axis control along the orbit normal by the Bdot law quickly, the initial spin rate of 8 rpm was reduced to 5 rpm.
- It was found that the sun declination w.r.t the determined spin axis and the measured sun declination, using TWSS data, was consistent. In addition, it is established that the spin rate determined, using TWSS and magnetometer data, were consistent with each other. This activity has confirmed a normal behavior of attitude the sensors onboard. The attitude determination in various phases of the mission revealed that the Bdot law for such inclination and with a 16º half cone angle tends to work with larger time periods for the convergence and also, it was not the preferred orientation from the power generation point of view during all the sessions. Hence, manual spin axis orientation control (SAOC) was used to align the spin axis instead of automatic Bdot law control. The attitude information was obtained after each SAOC operation, using the magnetometer and TWSS sensor data (Ref. 10).
Sensor Complement
RF communications: ANUSat carries a digital store and forward payload for amateur communications designed and built by ISL (Integrated Systems Laboratory) of Anna University.
S&F (Store-&-Forward) communications package operating in amateur (digital) mode with VHF frequency bands. All digital FSK receiver and turbo coding for data transmission as a technological payload is also being developed for technology validation. The objective of S&F is to conduct experiments on message transfer across the country. 11)
• Telecommand receiver: VHF (PCM/FSK/AM); 100 bit/s, 149.522 MHz
• Telemetry transmitter: VHF (PCM/FSK/AM); 512 bit/s, 137.4 MHz
• Payload transmitter: UHF 435 MHz downlink
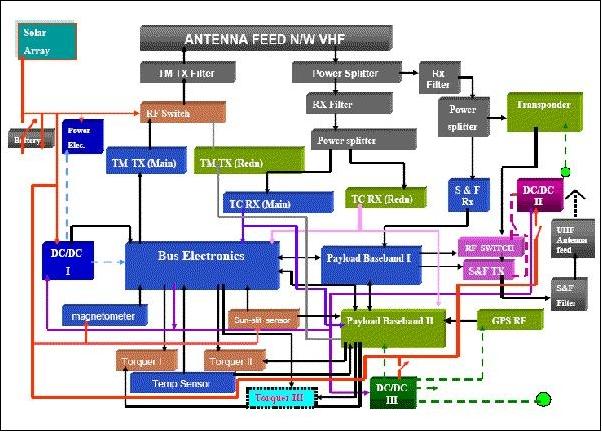
Secondary experiments are being conducted with a MEMS gyroscope, a MEMS magnetic field sensor, and with an FPGA-based GPS receiver.
Students, researchers and teachers will be able to use the satellite's store and forward facility to transmit and access information from any of its four ground stations in India located at Chennai, Bangalore, Guwahati and Pune.
References
1) K. Thyagarajan, J. P. Gupta, P. S. Goel, K. Jayaraman, "University Small Satellite Program - ANUSat," 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April, 7-11, 2003, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv4/IAA-B4-0501.pdf
2) http://www.spacedaily.com/news/microsat-02c.html
3) K. Thyagarajan, J. P. Gupta, P. S. Goel, K. Jayaraman, "University Small Satellite Program - ANUSat," Acta Astronautica, Vol. 56, Issue 1-2 (Special Issue), January 2005, pp. 89-97
4) http://beswaminathan.googlepages.com/anusat
5) http://www.annauniv.edu/anusat/
6) http://www.annauniv.edu/anusatspecs.pdf
7) R. Dhanraj, Mala John, P. V. Ramakrishna, B. Umamaheshwari, V. Vaidehi, "Design, Development and Two Years of On Orbit Operation of ANUSat," National Conference on Space Transportation Systems, STS 2011, ISRO/VSSC, Trivandrum, India, Dec. 16- 18, 2011, URL: https://docs.google.com/file/d/0B7NoO7MMFPE0MzIyZDM2YTMtNDczZS00MTI4LTllM
jQtNGZlZjkyMTVkOTQx/edit?pli=1
8) http://www.isro.org/satellites/ANUSAT.aspx
9) P. Suraksha, "It's Indeed Rocket Science! ," The New Indian Express, Dec. 8, 2014, URL: http://www.newindianexpress.com/education/edex/It%E2%80%99s-Indeed-Rocket-Science/2014/12/08/article2556927.ece
10) A. L. Satheesha, R. Pandiyan, K. Harendranath, "In-flight Experience of ANUSat Attitude Behavior and Determination," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
11) V. Suresh Kumar, R. Srinivasan, N. Amaresh, V. Vaidehi, "Modeling of Various Phases of Micro Satellite using Timed Petri Nets," International Conference on Signal Processing, Communications and Networking, 2007, ICSCN '07, Feb. 24-27, 2007, Chennai, India
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top