ArgoMoon CubeSat
EO
ASI
Quick facts
Overview
| Mission type | EO |
| Agency | ASI |
| Launch date | 16 Nov 2022 |
ArgoMoon
Spacecraft Secondary Payloads References
ArgoMoon is a 6U CubeSat deep-space mission of ASI (Italian Space Agency). ESA has selected the ArgoMoon CubeSat of ASI to fly in 2020 on NASA's Orion EM-1 (Exploration Mission-1) maiden flight along with 12 other Cubesats, powered by NASA's newly developed SLS (Space Launch System). "This could be the first European CubeSat to leave Earth orbit and we are looking forward to it capturing historic images of the first Orion mission," says David Parker, ESA Director of Human Spaceflight and Robotic Exploration.
The Italian company Argotec S.r.I. of Turin is building the ArgoMoon CubeSat under ASI's internal review and approval process. ArgoMoon will be the first nanosatellite to be released by ICPS (Interim Cryogenic Propulsion Stage), the SLS second stage: it will be a witness to this historical NASA mission, providing, among all, significant photographic information of the EM-1 mission. ArgoMoon will demonstrate the ability to perform operations in close proximity of the ICPS , which will send Orion onto its lunar trajectory. It should also record images of the ICPS for historical documentation and to provide valuable mission data on the deployment of other CubeSats. Additionally, this CubeSat should test optical communication capabilities between the CubeSat and Earth. 1) 2) 3)

Mission objectives: The primary goal of the mission is to take detailed photographs of the SLS secondary propulsion stage: the pictures will be collected by ArgoMoon during a proximity maneuvering phase, which will also allow to validate the tracking algorithm developed by Argotec. After that, orbital maneuvers will move the satellite into a geocentric highly elliptical orbit, whose apogee is high enough to allow flybys and imaging of the Moon and the surrounding environment.
The first challenge that ArgoMoon will face once deployed from the ICPS is to stabilize its own attitude and start the proximity flight around the ICPS. During this mission phase, ArgoMoon will recognize and point the second stage of SLS using an automatic and complex software algorithm. The ICPS targeting is required in order to collect detailed inspection shootings of the second stage of SLS to confirm operations success and to provide historical mission information to the scientific community. 4) 5)
At the end of this phase, ArgoMoon will perform a maneuver to move in a geocentric orbit with high eccentricity and apogee close to the Moon distance. The second part of this mission will last a few months up to the natural decay of the satellite. During these months, the satellite will collect images of the Earth-Moon system and will validate the nanotechnology on board the platform in the hostile environment of deep space.
Spacecraft
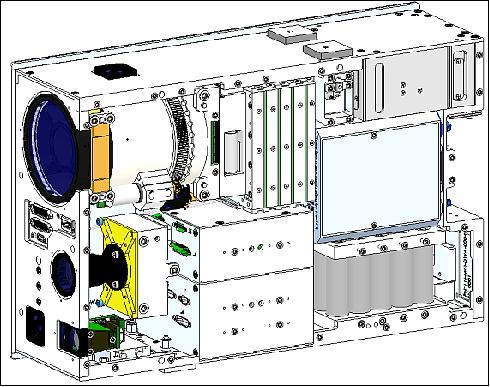
ArgoMoon has been designed to operate in Deep Space, while taking images of the Moon and Earth surfaces, performing multiple propulsive maneuvers and communicating with the ground from long distances. The highly demanding mission environment required to implement design strategies driven by the newest trends and technologies available in the commercial space businesses along with new approaches focused on lean design and project development. While COTS components have been implemented in the design, some key systems have been developed or customized by Argotec to increase their performances and reliability. Several companies and International Partners from Europe and the U.S. have been involved in the project, under the ASI leadership.
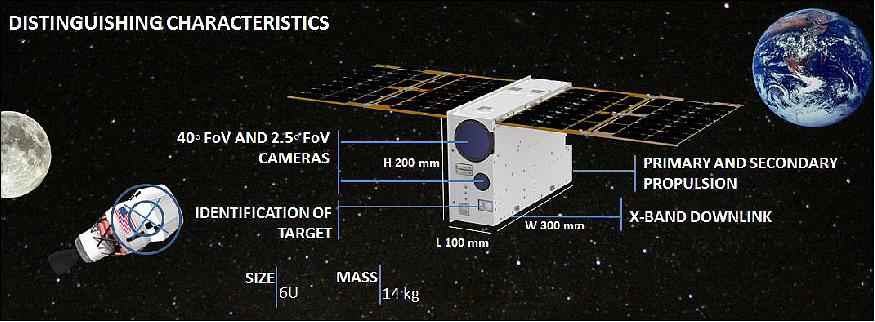
ArgoMoon is a 6U CubeSat with a mass of approximately 14 kg equipped with the following subsystems:
• The Payload (PL) has two operationally independent optics that allow maximizing the tracking performance while keeping the high fidelity of the detailed pictures.
• A Rangefinder (RF) controls the distance from target in order to maintain safety margins.
• A customized EPS (Electrical Power Subsystem) manages the power produced by SPA (Solar Panel Array) and stored in the battery.
• A MiPS (Micro Propulsion Subsystem) is able to modify the satellite orbit and desaturate the reaction wheels used for attitude control.
• The ADCS (Attitude Determination Control Subsystem) is composed of a star tracker, two sun sensors and reaction wheels to control the attitude of the satellite and allow high pointing performance.
• The TMTC (Telemetry and Telecommunication) subsystem codes the data thanks to the on-board radio and then transmit telemetry and data through different antennas positioned both on the top and on the bottom of the satellite.
• A customized OBC (On Board Computer) is able to control and monitoring the activities of the various subsystems, while also hosting and operating the image recognition algorithm.
All subsystems are designed to withstand the thermal, radiation and operational loads typically experienced in deep space. In the following more detailed information on each subsystem is provided.
The Payload subsystem represents a new development customized on ArgoMoon mission needs fitting available weight and volume that has been qualified to fly in Deep Space. It is composed by 2 optical cameras with different Fields of View (FoV) to take pictures of the desired target (ICPS, Moon and Earth) and a Range Finder to measure its relative distance from ICPS during proximity maneuvers.
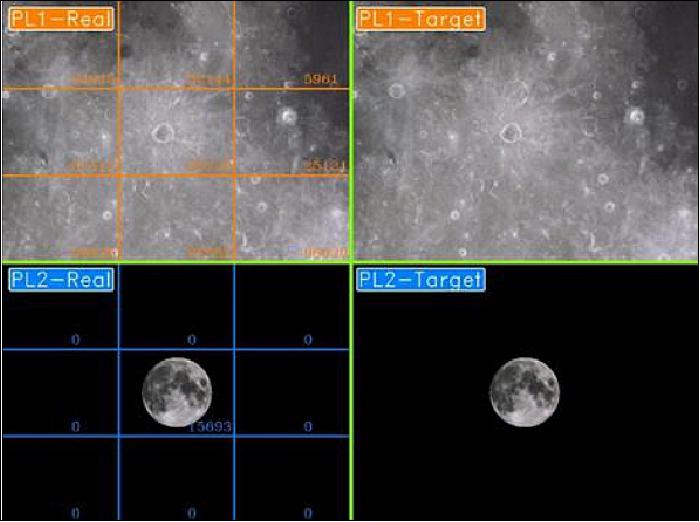
The configuration with multiple optics with different FoV optimizes the tracking performance of the system while keeping the high resolution of the pictures from long distances. The camera with the wide FoV is able to capture a bigger section of the sky and thus can rapidly scan the space around the satellite looking for the target. Once locked on the target, the OBC will send a command to the ADCS to point the satellite in order to center the target on the picture. When the satellite is stabilized with respect to the target, the narrow FoV camera, which works as a telescope, will be able to take detailed pictures of the object with different resolutions according to the distance. Considering the ICPS dimensions of around 5 meters of diameter, the photos' resolution is 1 px/cm from 100 meters, 1 px/dm from 1000 meters and so on reducing with the distance.
The payloads operate in a guaranteed visible spectrum due to the lens coating that filters undesired frequencies. Each optic is equipped with a high-speed CMOS image sensor with a resolution of 4096x3072 pixels commanded by dedicated electronics that can handle picture in different formats (RAW, GreyScale, RGB) according to the commands from the OBC and depending on the mission needs.
The RF is also part of the PL and is essential to evaluate the distance from the target in order to respect the safety limits imposed by NASA that established a forbidden area below 100 meters from ICPS. This component can measure without problems distances up to 5 km with a resolution of 0.1 m.
Given the nature of the mission and the optical nature of the payload, the imaging software implemented in the OBC is a key component of the satellite. The algorithm performs 3 subsequent steps, described in Figure 4. 6)
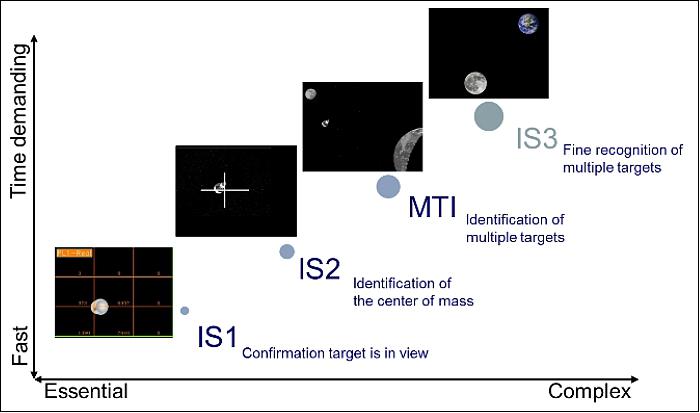
The first part of the software is able to recognize the presence of an object in the FoV and roughly align the satellite towards the target. The second algorithm can perform fine pointing when targeting the ICPS and if necessary recognize different targets (Earth or Moon) while a third part of the software can recognize the stage and confirm that ICPS is in the FoV. From that moment the satellite will start the shooting session, taking high resolution pictures that will be selected and transmitted to Earth. If required, the software is also able to recognize the Earth and the Moon from images and to acquire additional information on its attitude to feed the navigation and attitude control subsystem.
The OBC has been designed with a flexible architecture to meet not only the ArgoMoon mission requirements but the needs of a broad variety of mission scenarios. It is based on two main components, a Field Programmable Gate Array (FPGA) that hosts the interfaces with all subsystem, and a CPU connected to the FPGA capable of supporting the elaboration of the inputs from the satellite and providing instructions to all subsystem. The CPU is a dual-core processor with a long and proven flight heritage in high reliability space applications, while the FPGA integrates a fourth-generation flash-based FPGA fabric and high-performance interfaces such as SerDes on a single chip. It maintains the resistance to radiation-induced configuration upsets in the harshest radiation environments such as space flight (geocentric orbits like LEO, MEO, GEO, HEO, and deep space ones), since they are hardened by design against radiation-induced SEUs.
The OBC board also provides different types of integrated memory for different use, NAND memory with high density data storage for images and mission telemetry, Electrically Erasable Programmable Read Only Memory (EEPROM) to store flight software and status data and a Synchronous Dynamic RAM (SDRAM) memory to allocate code and data at runtime. Each type of memory is protected by Error Detection And Correction (EDAC) protocols and the entire OBC includes Failure Detection Isolation and Recovery (FDIR) routines that check and correct the status of the system. The OBC has been integrated along with the EPS control and power distribution boards inside a metallic chassis to form the Power and Data Handling Unit (PDHU). This aluminum box contains the boards of both core systems (OBC and EPS) and provides an additional mitigation from external radiation in addition to the main structure of the CubeSat.
The EPS as well has been designed to guarantee a certain flexibility as a general-purpose power distribution subsystem, customizable as it has been done for the ArgoMoon mission. It is able to manage the significant amount of power coming from Solar panel and battery with a high efficiency and distribute it to each subsystem. Its distribution bus is monitored continuously in order to avoid overcurrent, overvoltage and disconnect the line in case of a fault to prevent permanent damage. Special attention has been dedicated to the connection with the battery, usually considered a hazardous component in aerospace standards. The power line from the external connector to the battery and the EPS is protected and monitored to avoid any safety hazard during ground, launch of flight conditions. An additional level of safety is guaranteed by release switches used to prevent premature activation of the satellite when stowed in ICPS.
The structure has been entirely designed and developed in-house by Argotec to guarantee the protection needed against Deep space environment together with resistance to launch loads. The structure and the rear side of the solar panel are covered with a particular painting allowing heat to be radiated into space and temperature in the satellite to be kept under control without any active components. Due to the high temperature reached by the propulsion system during the maneuvers, MLI insulators are installed to maintain the thermal balance of the satellite. Several temperature sensors are also placed in key points to monitor the thermal status of the satellite and prevent any overheating damage.
The main thruster can provide almost 100 mN of thrust with a specific impulse (Isp) of 190s, and will allow the braking maneuver to be performed and all attitude corrections during mission operations. The Propulsion Subsystem is also equipped with 4 micro nozzles to control the attitude and desaturate the reaction wheels used for fine pointing during scientific phases. The ADCS is a COTS component equipped with a high precision star tracker and gyros, that combined together guarantee a pointing accuracy better than 0.01º.
The telemetry and telecommand subsystem (TMTC) include an X-Band transponder in charge of handling both downlink and uplink communications, connected to four X-Band antennas. The radio, procured from a US company, has been specifically developed for CubeSats applications and it is compatible with the DSN services. It allows stable transmission performances and advanced ranging functionalities necessary for accurate deep space navigation.
Propulsion Subsystem: VACCO's hybrid MiPS (Micro Propulsion Subsystem) combines green monopropellant and cold gas propulsion in a single system to provide attitude control and orbital maneuvering. Argotec's ArgoMoon program utilizes VACCO's hybrid propulsion system to achieve high levels of total impulse in a limited volume to accomplish the mission requirements. 7)
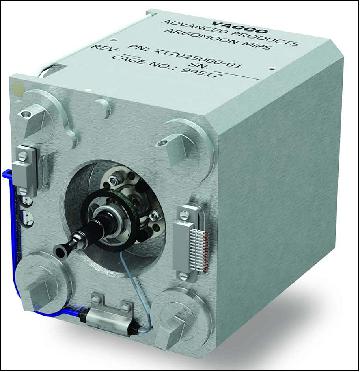
The VACCO ArgoMoon MiPS is approximately 1.3U plus the tuna can volume and uses one 100 mN green thruster to develop 783 N s of total impulse that provides 56 m/s of ΔV for a 14 kg CubeSat. The four 25 mN cold gas thrusters develop 72 Ns of total impulse. Each thruster independently operates to perform both ΔV and ACS (Attitude Control System) maneuvers through an integrated microprocessor controller. 8)
Features:
• Integral titanium fluid control manifold and low friction, space grade valves
• All welded tank construction contains 420 g of propellant and 215 g of pressurant
• Integrated microcontroller and RS-422 interface enable high-level commands from the host spacecraft
• Low power with < 1 Watt for health and status monitoring
• Easily configured for different mono-propellants
- ADN green (LMP-103S)
- Air Force green (AF-M315E)
• Performance density: 692 Ns/L
• MiPS dry mass = 1.430 kg Max; wet mass (95% Fill @ 10ºC) = 2.065 kg Max.
• Thruster operating power: 4.3 W Max; standby power: 1 W Max.
In summary, the ArgoMoon 6U CubeSat is under development by the Argotec company, for the Italian Space Agency, as European contribution to the NASA SLS EM-1 mission. The program is currently in an advanced stage: the ArgoMoon design has been consolidated and the manufacturing of the ground reduced model, for functional testing, is followed by the flight model assembly and test. The robustness of the design and the proper margins are confirmed by the experimental verifications, in progress.
The EM-1 flight will provide the opportunity for a final validation of the whole system; it will firstly serve as important witness of the SLS first launch result and later, interesting outcomes are expected from the second part of the mission, when the CubeSat will collect pictures of the Earth-moon system. Despite the small size, it will be the first Italian asset operating in deep space, being an important milestone in the national scenario. Additionally, the ArgoMoon platform represents a new generation of modular and flexible CubeSats, capable to face the challenges of diverse future Deep Space missions.
Overview of Secondary Payloads on the Orion/EM-1 Mission
The first flight of NASA's new rocket, SLS ( Space Launch System), will carry 13 CubeSats/Nanosatellites to test innovative ideas along with an uncrewed Orion spacecraft in 2020. These small satellite secondary payloads will carry science and technology investigations to help pave the way for future human exploration in deep space, including the journey to Mars. SLS' first flight, referred to as EM-1 (Exploration Mission-1 ), provides the rare opportunity for these small experiments to reach deep space destinations, as most launch opportunities for CubeSats are limited to low-Earth orbit. 9) 10)
The secondary payloads, 13 CubeSats, were selected through a series of announcements of flight opportunities, a NASA challenge and negotiations with NASA's international partners.
NASA selected two payloads through the NextSTEP (Next Space Technologies for Exploration Partnerships) Broad Agency Announcement of May 5, 2015:
• LunIR ⟨originally called Skyfire) - Lockheed Martin Space Systems Company, Denver, Colorado, will develop a 6U CubeSat to perform a lunar flyby of the moon, taking sensor data during the flyby to enhance our knowledge of the lunar surface. LunIR will test a new technology mid-wave infrared camera and micro-cryocooler. LunIR also includes a visible imager.
• Lunar IceCube - Morehead State University, Kentucky, will build a 6U CubeSat to search for water ice and other resources at a low orbit of only 62 miles above the surface of the moon. This CubeSat will orbit the Moon and prospect for water and other volatiles in lunar regolith using BIRCHES (Broadband Infrared Compact High-Resolution Exploration Spectrometer) developed at NASA/GSFC.
Three payloads were selected by NASA's Human Exploration and Operations Mission Directorate:
• NEA Scout (Near-Earth Asteroid Scout), the 6U CubeSat of NASA/MSFC/JPL will perform reconnaissance of an asteroid, take pictures and observe its position in space
• BioSentinel - a 6U CubeSat of NASA/ARC will use yeast to detect, measure and compare the impact of deep space radiation on living organisms over long durations in deep space.
• Lunar Flashlight - a 6U CubeSat of NASA/JPL/MSFC will look for ice deposits and identify locations where resources may be extracted from the lunar surface
Two payloads were selected by NASA's Science Mission Directorate:
• CuSP – a 6U CubeSat of the SwRI (Southwest Research Institute) "space weather station" to measure particles and magnetic fields in space, testing the practicality for a network of stations to monitor space weather
• LunaH-Map a 6U CubeSat of Arizona State University will map hydrogen within craters and other permanently shadowed regions throughout the moon's south pole
Three additional payloads were determined through NASA's Cube Quest Challenge – sponsored by NASA's Space Technology Mission Directorate and designed to foster innovations in small spacecraft propulsion and communications techniques. CubeSat builders will vie for a launch opportunity on SLS' first flight through a competition that has four rounds, referred to as ground tournaments, leading to the selection in 2017 of the payloads to fly on the mission.
• Cislunar Explorers, Cornell University, Ithaca, New York. Cislunar Explorers' concept consists of a pair of spacecraft on a mission to orbit the moon. These two spacecraft are mated together as a 6U CubeSat. After deployment from the launch vehicle, they will split apart and each give their initial rotation in the process of decoupling.
• CU-E3(CU Earth Escape Explorer), a 6U CubeSat of the University of Colorado in Boulder, CO. The CU-E3 mission will use a lunar gravity assist maneuver to place the CubeSat in a heliocentric orbit that trails the Earth at a distance > 1AU (Astronomical Unit). The distance between the Earth and the spacecraft will gradually increase over time, reaching 27 million km by the end of its one-year mission.
• Team Miles, Team Miles is led by the company Fluid and Reason LLC. Team Miles is a group of citizen scientists and engineers that initially came together through Tampa Hackerspace in Florida – all participants in the community, nonprofit workshop. Team Miles is a 6U CubeSat to demonstrate navigation in deep space using innovative plasma thrusters. Use of a software defined S-band radio to communicate with Earth.
Overview of the 10 selected US secondary missions for the inaugural Orion/EM-1 test flight plus three CubeSats from international partners 11) 12)
NASA has also reserved three slots for payloads from international partners. These are: 12)
• EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) of ISSL (Intelligent Space Systems Laboratory) of the University of Tokyo and JAXA. EQUULEUS will help scientists understand the radiation environment in the region of space around Earth by imaging Earth's plasmasphere and measuring the distribution of plasma that surrounds the planet. This opportunity may provide important insight for protecting both humans and electronics from radiation damage during long space journeys. It will also demonstrate low-energy trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon region.
• OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) of JAXA. JAXA will use the OMOTENASHI to demonstrate the technology for low-cost and very small spacecraft to explore the lunar surface. This technology could open up new possibilities for future missions to inexpensively investigate the surface of the moon. The CubeSat will also take measurements of the radiation environment near the moon as well as on the lunar surface.
• ArgoMoon. The Italian company Argotec is building the ArgoMoon CubeSat under the Italian Space Agency (ASI) internal review and approval process. ArgoMoon will demonstrate the ability to perform operations in close proximity of the ICPS ( Interim Cryogenic Propulsion Stage), which will send Orion onto its lunar trajectory. It should also record images of the ICPS for historical documentation and to provide valuable mission data on the deployment of other CubeSats. Additionally, this CubeSat should test optical communication capabilities between the CubeSat and Earth.
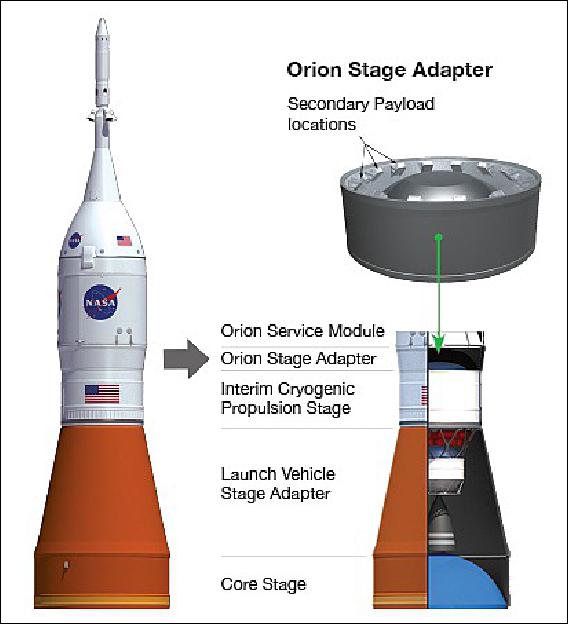
All the CubeSats will ride to space inside the Orion Stage Adapter, which sits between the ICPS ( Interim Cryogenic Propulsion Stage) and Orion (Figure 7). The cubesats will be deployed following Orion separation from the upper stage and once Orion is a safe distance away.
The SPIE ( Spacecraft and Payload Integration and Evolution) office is located at NASA/MSFC (Marshall Space Flight Center) in Huntsville, Alabama, which handles integration of the secondary payloads.
These small satellites are designed to be efficient and versatile—at no heavier than 14 kg, they are each about the size of a boot box, and do not require any extra power from the rocket to function. The science and technology experiments enabled by these small satellites may enhance our understanding of the deep space environment, expand our knowledge of the moon, and demonstrate technology that could open up possibilities for future missions. 13)
A key requirement imposed on the EM-1 secondary payload developers is that the smallsats do not interfere with Orion, SLS or the primary mission objectives. To meet this requirement, payload developers must take part in a series of safety reviews with the SLS Program's Spacecraft Payload Integration & Evolution (SPIE) organization, which is responsible for the Block 1 upper stage, adapters and payload integration. In addition to working with payload developers to ensure mission safety, the SLS Program also provides a secondary payload deployment system in the OSA (Orion Space Adapter). The deployment window for the CubeSats will be from the time ICPS disposal maneuver is complete (currently estimated to require about four hours post-launch) to up to 10 days after launch. 14)
References
1) Kathryn Hambleton, Kim Henry, Tracy McMahan, "International Partners Provide Science Satellites for America's Space Launch System Maiden Flight," NASA May 26, 2016, URL: https://www.nasa.gov
/exploration/systems/sls/international-partners-provide-cubesats-for-sls-maiden-flight
2) "Small Satellite Unit (SSU)," Argotec, URL:
https://web.archive.org/web/20220116212850/http://www.argotec.it/online/what-we-do/small-satellite-unit/
3) "ArgoMoon: the Italian excellence at one "click" from the Moon," Argotec, 2 Feb. 2016, URL: https://web.archive.org/web/20220203151918/https://www.argotec.it/online/wp-content/uploads/2017/04/CS_ARGOMOON_EN.pdf
4) "ArgoMoon – An Italian Eye on the EM-1," Information provided by Chiara Palatini, Argotec Communications Officer
5) Valerio Di Tana, Gabriele Mascetti, Simone Pirrotta, Carlo Fiori, Riccardo Rinaldi, Simone Simonetti, Biagio Cotugno, "ArgoMoon: Challenges And Design Solutions For The Development Of A Deep Space Small Satellite," Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B4.8.1, URL: https://iafastro.directory/iac/proceedings
/IAC-18/IAC-18/B4/8/manuscripts/IAC-18,B4,8,1,x43262.pdf
6) C. Galbiati, G. Reverberi, E. Fazzoletto, F. Iorizzo, "ATENA: an advanced solution for the simulation and validation of nanosatellite operations," Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B6.3.8, URL: https://iafastro.directory
/iac/proceedings/IAC-18/IAC-18/B6/3/manuscripts/IAC-18,B6,3,8,x44804.pdf
7) "ArgoMoon Propulsion System," VACCO Industries, URL:
http://www.cubesat-propulsion.com/argomoon-propulsion-system/
8) "Data Sheet of ArgoMoon Propulsion System," URL: http://www.cubesat-propulsion.com
/wp-content/uploads/2017/08/X17025000-data-sheet-080217.pdf
9) Kathryn Hambleton, Kim Newton, / Shannon Ridinger, "NASA Space Launch System's First Flight to Send Small Sci-Tech Satellites Into Space," NASA Press Release 16-011, Feb. 2, 2016, URL: http://www.nasa.gov/press-release
/nasa-space-launch-system-s-first-flight-to-send-small-sci-tech-satellites-into-space
10) Christopher Moore, Jitendra Joshi, Nicole Herrmann, "Deep-Space CubeSats on Exploration Mission-1," Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper:IAC-17-B4.8
11) "Three DIY CubeSats Score Rides on NASA's First Flight of Orion, Space Launch System," NASA Release 17-055, 8 June 2017, URL: https://www.nasa.gov/press-release
/three-diy-cubesats-score-rides-on-nasa-s-first-flight-of-orion-space-launch-system
12) Kathryn Hambleton, Kim Henry, Tracy McMahan, "International Partners Provide Science Satellites for America's Space Launch System Maiden Flight," NASA, 26 May 2016 and update of 07 February 2018, URL: https://www.nasa.gov/exploration/systems/sls
/international-partners-provide-cubesats-for-sls-maiden-flight
13) "Smallsats Of Scientific Persuasions To Be Supplied By International Partners To NASA For The Maiden Flight Of SLS," Satnews Daily, May 31, 2016, URL:
http://www.satnews.com/story.php?number=1735749470
14) Kimberly F. Robinson, Scott F. Spearing, David Hitt, "NASA's Space Launch System: Opportunities for Small Satellites to Deep Space Destinations," Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-IX-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4119&context=smallsat
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).