ASNARO (Advanced Satellite with New system ARchitecture for Observation)
EO
NEC Corporation
USEF
Launched in November 2014, the Advanced Satellite with New system ARchitecture for Observation (ASNARO) is an Earth imaging mission currently under development by the NEC Corporation and the Institute for Unmanned Space Experiment Free Flyer (USEF). The aim for the mission is to use open architecture techniques and manufacturing methods to develop a high-performance minisatellite bus system, in turn allowing for up-to-date technology to be utilised, as well as drastically reducing costs and development time.
Quick facts
Overview
| Mission type | EO |
| Agency | NEC Corporation, USEF |
| Launch date | 06 Nov 2014 |
| End of life date | 06 Nov 2019 |

Summary
Mission Capabilities
ASNARO carries an Optical Sensor (OPS), developed by NEC and NEC Toshiba Space Systems Ltd. (NTSpace). OPS is a pushbroom sensor used to provide general Earth observation data in four different observation modes, which include snapshot, wide view, 3D and strip map modes through the Visible Near Infrared (VNIR) bands.
Performance Specifications
ASNARO samples with a swath width of 10 km and a Ground Sample Distance (GSD) of 2 m in the multispectral (MS) bands, and a GSD of 0.5 m in the panchromatic band (PAN). Furthermore, ASNARO images in six MS bands and one PAN band.
ASNARO operates in a sun-synchronous orbit, with a nominal altitude of 504 km and inclination of 97.4°.
Space and Hardware Components
ANSARO uses the NEC next generation STAR (NEXTAR) satellite bus series, and was selected to use the NEXTAR-300L bus developed by NEC. The bus was developed as a package which integrates the data network, ground system and satellite, reducing costs and ensuring great versatility. Telemetry data is transferred through S-band communications and payload data is transferred through X-band communication at a data rate of 800 Mbit/s.
ASNARO (Advanced Satellite with New system ARchitecture for Observation)
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References
ASNARO is a Japanese optical high-resolution Earth imaging mission under development by the NEC Corporation and USEF (Institute for Unmanned Space Experiment Free Flyer). The project is funded by NEDO (New Energy and Industrial Technology Development Organization), a Department of METI (Ministry of Economy, Trade and Industry) of the Government of Japan.
The ASNARO project was initiated by USEF in 2008. The overall objective is to develop a next-generation high-performance minisatellite bus system based on open architecture techniques and manufacturing methodologies to drastically reduce the cost and the development period with adoption of up-to-date electronics technologies. The observation requirements call for the provision of high-resolution imagery [Pan of < 0.5 m, and MS of 2 m GSD (Ground Sample Distance) on a swath of 10 km]. This implies also the development of a high-performance imager and to demonstrate new technologies in space. 1) 2) 3) 4) 5) 6)
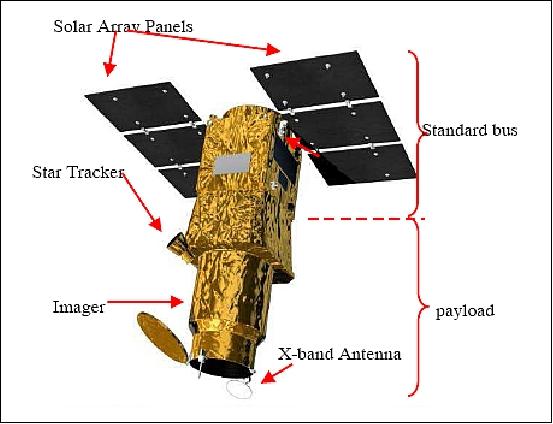
Spacecraft
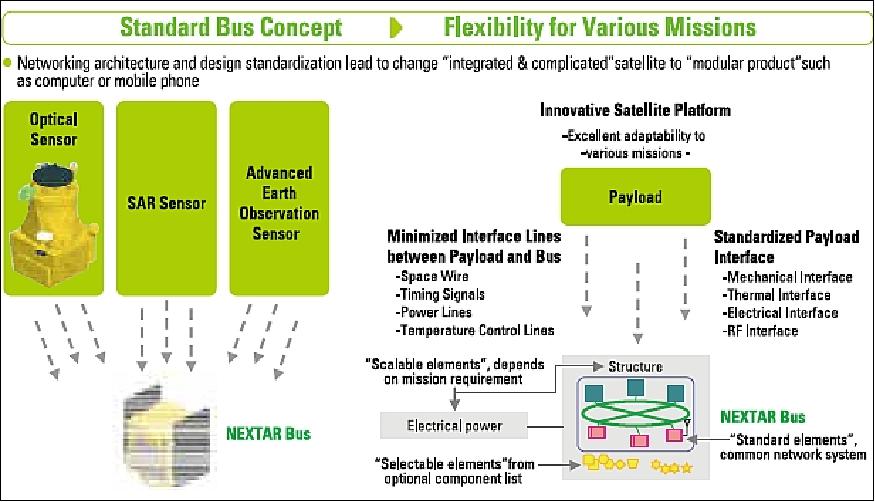
The new NEC standard minisatellite bus system under development, the result of a joint study by JAXA/ISAS and NEC, is highly adaptive for various missions. As the payload interfaces are standardized - including mechanical, thermal, electrical and RF interfaces - the bus system can be applied not only for optical observation mission but also for other payloads like the SAR, hyperspectral, and infrared instrument applications. Due to these features, NEXTAR (NEC next generation STAR) is highly adaptive for various missions and can reduce non-recurrent cost and development time. NEXTAR series consists of NEXTAR-100L/300L/500L, etc. corresponding to a size of satellite bus. 7) 8) 9) 10) 11) 12) 13) 14) 15)
The ASNARO project selected the NEXTAR-300L bus developed by NEC. NEC intends to apply this bus system for commercial and EO uses. The goals of NEXTAR-300L system are as follows:
• To provide a high performance advanced minisatellite (100-500 kg) system at a low cost and in short time
• To provide an end-to-end solution (including the satellite, ground system, data network, satellite application and technology transfer) as a package
• Use of the SpaceWire network architecture.
The performance features of ASNARO in GSD (Ground Sample Distance) are comparable to those of other advanced commercial imaging missions like GeoEye-1, WorldView-2 and Pleiades-HR, with a considerable smaller spacecraft mass.
Item/Parameter | GeoEye-1 | WorldView-2 | Pleiades-HR1 | ASNARO |
Country of spacecraft owner | USA | USA | France | Japan |
Launch year | September 2008 | October 2009 | December 2011 | November 2014 |
Orbit altitude (SSO) | 681 km | 770 km | 694 km | 504 km |
Mission life | 7 years | 7.25 years | 5 years | 3 years |
Spacecraft mass | ~2000 kg | 2800 kg | 1000 kg | < 500 kg |
GSD (Ground Sample Distance) | 0.41 m (Pan) | 0.46 m (Pan) | 0.7 m (Pan) | < 0.5 m (Pan) |
Swath width (nadir) | 14.4 km | 16.4 km | 20 km | 10 km |
Data rate | 740 Mbit/s | 800 Mbit/s | 465 Mbit/s | 800 Mbit/s |
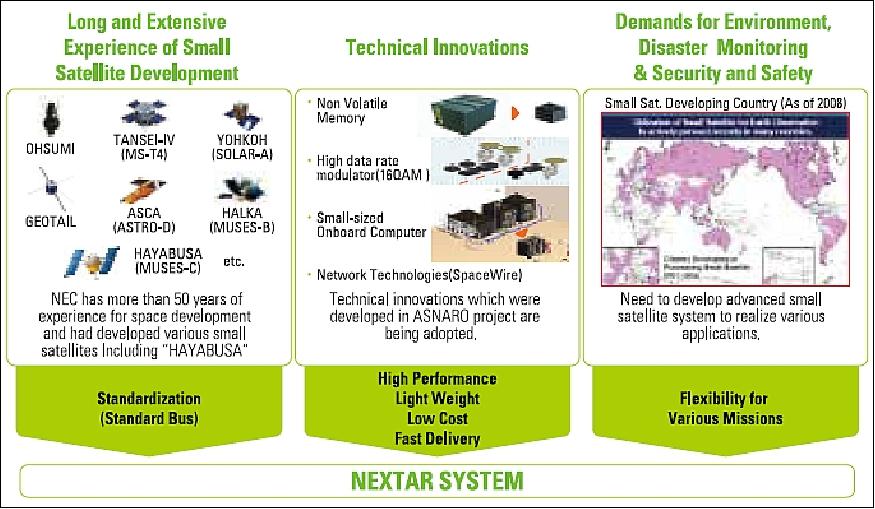


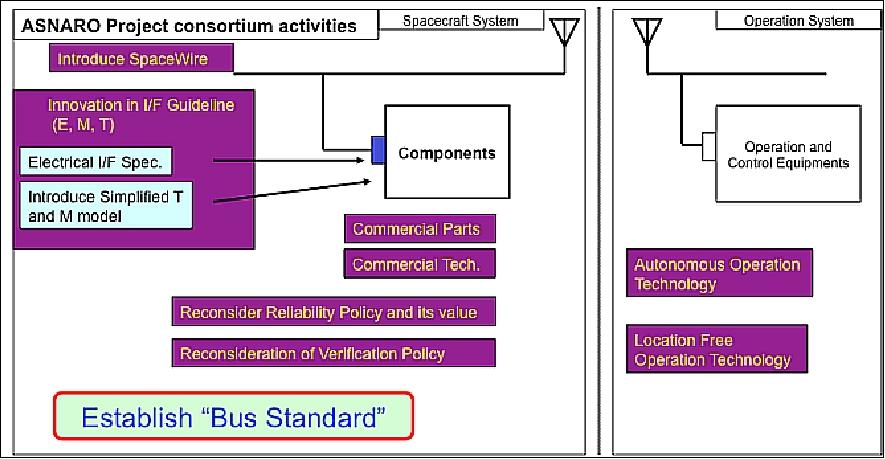
The establishment of the "bus standards" to innovate the spacecraft development architecture is expected to reduce the hurdle heights for a small business enterprise to enter the "space market" to induce the competition, and reduce the cost and development time of future spacecraft, and finally excite whole space industries (Ref. 4).
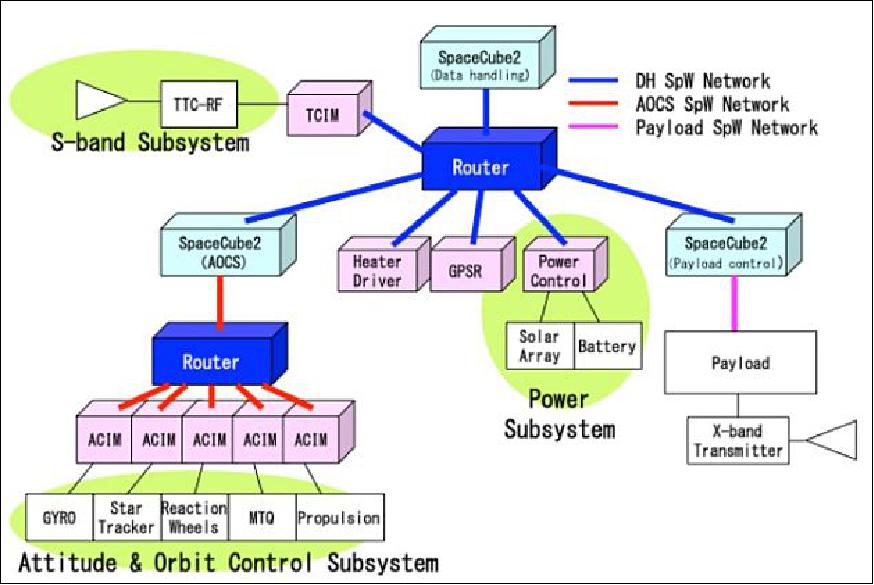
The minisatellite bus system is comprised of subsystems which can be arranged in building-block style with the SpaceWire network, using high-performance COTS components and improved verification test methods. The SpaceWire RMAP (Remote Memory Access Protocol) technology is adopted as one of the standardization features of NEXTAR.
SMS (Satellite Management Subsystem): SMS, which is in charge of the data processing of the NEXTAR standard platform, consists of the following components (Ref. 11): 16)
- Versatile onboard computer(SpaceCube2)
- Telemetry/Command interface module
- SpaceWire router
- Network data recorder
- Standard middleware
- Software development kit
These components are implemented with universality by improving previous satellite subsystems on the following points:
1) Radiation-resistance devices: To prevent soft errors caused by space radiation, such as data inversion or latch-up due to excessive current, the main devices, including microprocessors and routers, are manufactured using the SOI (silicon on Insulator) process, which features excellent radiation resistance. This leads to the error-free operation of the devices in the radiation environment inside the solar system.
2) High-speed, universal network: SpaceWire NEXTAR uses the SpaceWire RMAP standard, which is the embedded network protocol standardized internationally by the EU, USA, Japan and Russia. By using this technology, the communication at up to 400Mbit/s per channel can be achieved with a simplified architecture.
3) Versatile multi-purpose embedded computer: With previous satellites, it had been a common practice to develop a dedicated embedded computer in each subsystem. For the NEXTAR standard platform, the project developed the SpaceCube 2, a versatile multi-purpose computer application for the control of any subsystem, by reflecting recent improvements in microprocessor performance and advances in LSI integration. By concentrating all efforts for the development of the single type of computer, implementing ASICs extensively and developing basic software, the project succeeded in reducing the size to 1/8 of previous computers, thereby contributing to the size reduction of the satellite bus. This computer was mounted on the SDS-1 (Small Demonstration Satellite-1) of JAXA (launch Jan. 23, 2009), and completed the in-orbit demonstration without any problem (Ref. 11). 17) 18)
SpaceWire interface | 8 channels (nominal configuration) |
UART interface | 2 channels |
Size of computer system | 71 mm(W) x 220.5 mm(D) x 177.5 mm (H) |
Instrument mass | 1.9 kg (nominal) |
Power consumption | 14 W (nominal) |

4) Standard middleware/software design kit: The SpaceCube 2 uses a RTOS (Real-Time Operating System) based on TRON as its basic software. The RTOS is based on the TRON (The Real-time Operating system Nucleus) specification which was developed by a collaboration of Japanese industry and universities. The TRON package is used about 60% of the RTOS implementations in the embedded equipment market. It is low-price, but high-quality applications can be built easily. And it is blessed with a substantial technical education environment for fostering quality software development engineers. 19)
The project integrated the high-reliability technology assets as the standard middleware on the RTOS, achieving integration of the development environment across all subsystems. The RTOS and standard middleware are integrated into SDDS/E (System Director Developer's Studio/Embedded) that is provided as an open platform of an Eclipse-based embedded software integrated development environment. This development environment is provided exclusively through the NEC portal site based on cloud computing technology in order to ensure version control and configuration control. It also enables business deployment based on joint collaboration with a third-party vendor or enterprise.
The implementation of a standard platform in this way makes it possible to adapt flexibly to the remote sensing target, operation scale, operational mode and system operation period of each operator, to quicken integration and to deliver the spacecraft system to customers promptly in operation on the orbit (Ref. 11).
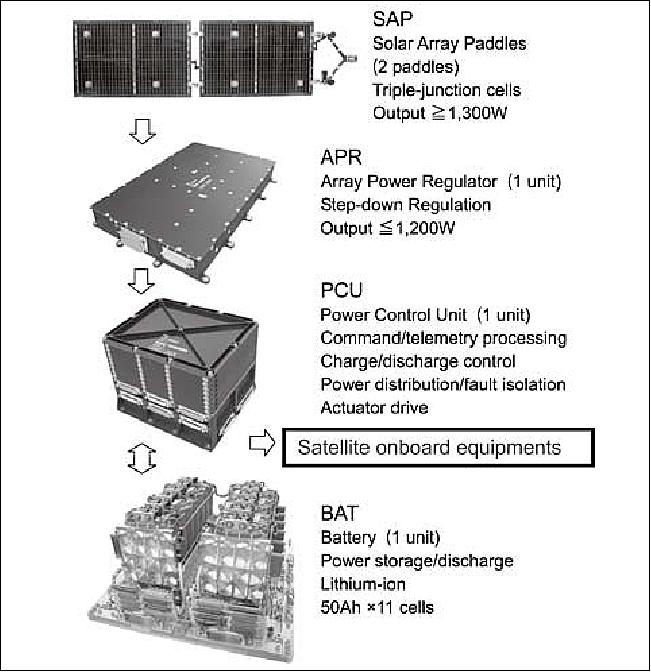
EPS (Electrical Power Subsystem) and SAP (Solar Array Paddle subsystem): The project developed power supply units and SAP that are compatible for use in low Earth orbit to deep space exploration missions; they feature a reduced number of units, compact size, light weight and low cost.
Electrical power is supplied using the series topology, in which the SAP outputs are connected in series to an APR (Array Power Regulator), which performs step-down regulation. This makes it possible to regulate the SAP output voltage, which varies greatly depending on the distance from the sun. The project also adopted the battery bus topology, in which the BAT (battery) and other satellite onboard equipments are connected directly to the APR output, so that the SAP output and BAT charging can be controlled by adjusting the APR output alone. The SAP uses triple junction high-efficiency solar cells and the BAT uses large (50 Ah capacity) lithium-ion battery cells.
The PCU (Power Control Unit) has a SpaceWire type data bus interface and achieves high functionality, compact size and low mass by means of high-density packaging (Figure 10).
AOCS (Attitude and Orbit Control Subsystem): Since the functional and performance requirements for the AOCS are highly dependent on each satellite's mission requirements, the functions, specifications, and configuration of devices such as sensors and actuators are variable between the satellite missions. Consequently, the AOCE (Attitude and Orbit Control Electronics) system, which is the computer handling the integrated control of these devices, is difficult to produce by repetitive manufacturing, making it necessary to develop and verify this subsystem independently for each project.
The project introduced SpaceWire technology in the AOCS and succeeded in implementing a "standard platform AOCS", which is a standardization of hardware and software at the module level that makes it possible to cope with any mission requirement using a catalog menu selection method. This new AOCS offers the following features:
1) The interfaces of the AOCE are implemented as individual interface modules called ACIMs (Attitude Control Interface Modules). The ACIMs can be combined according to the equipment configuration requirements of each satellite, so the AOCE can be manufactured by repetitive manufacturing. The SpaceWire connections between the ACIMs and the AOCE make design changes unnecessary resulting from additions or modifications. The AOCE itself is implemented using a universal computer [SMU ( Satellite Management Unit)] of the same type as those used in the data processing subsystem (Figure 11).
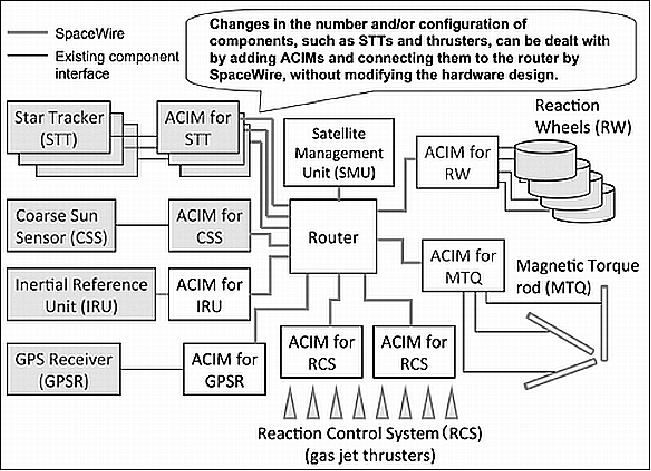
The AOCS of ASNARO includes an RCS (Reaction Control Subsystem). The spacecraft is very agile providing a body-pointing event monitoring capability of ±45º in any direction from nadir. The precise and swift control for the Earth observation maneuvers are performed by RWA (Reaction Wheel Assembly), IRU (Inertial Reference Unit), STT (Star Trackers), GPSR (GPS Receiver) and the control S/W in AOCS.
Spacecraft mass | Bus: 250 kg |
Spacecraft body pointing capability | ±45º from nadir in any direction (cross-track and/or along-track) |
RF communications | TTC in S-band |
Data storage and mass memory size | > 120 GByte (EOL) |
Spacecraft power | SAP (Solar Array Paddle) power > 1300 W, (400 W for payload) |
Spacecraft size (overall) | Approximately 2.5 m x 3.5 m x 3.2 m (deployed) |
Design life | 3 years (goal of 5 years of operations) |
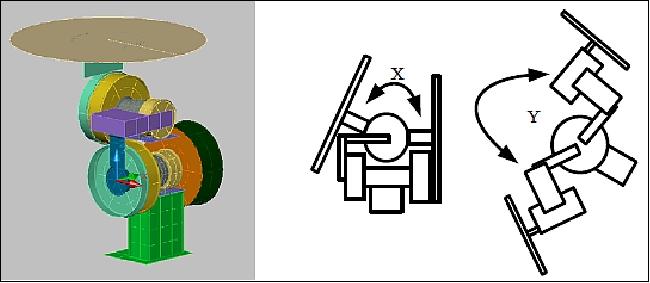
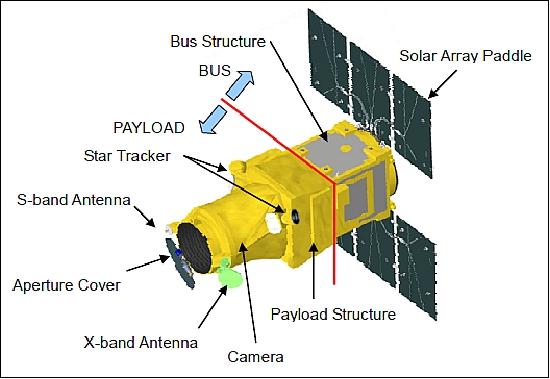
RF communications: The TT&C communications are in S-band. The stored image data are transmitted to the ground station by the X-band transmitter and the directional antenna mounted on the APM (Antenna Pointing Mechanism). The transmitting data rate is 800 Mbit/s with 16-QAM (Quadrature Amplitude Modulation).
APM is a small and low-mass device, developed and manufactured by Shinshu University and Tamagawa-seiki. Co, LTD, Japan. The objective is to achieve high speed data transmission to the ground station. 21) 22)
The low mass requirement was implemented with an aluminum structure and a cable tray system (instead of rotary joint mechanism to save costs). The mass of the APM is 4.4 kg, including the X-band antenna; the pointing accuracy of the unit is better than 0.1º. The maximum slew rate is 4º/s and the acceleration rate is 0.4º s-2.
Project status (Ref. 6):
• The ASNARO project started in 2008 and the program phase has shifted to its system-level testing
phase. Structural / thermal tests have been conducted on test models during summer 2010 and results showed that design analyses were valid.
• ASNARO bus structure was completed in 2010. SpaceWire component interface tests were performed from December 2010, and fundamental electronic tests including SpaceWire network tests at system-level were completed in March 2011.
• Proto-flight tests of the optical sensor were completed in 2011, followed by proto-flight tests of the spacecraft to be completed by Q2 of 2012, preparing for the launch campaign in December 2012.

Launch
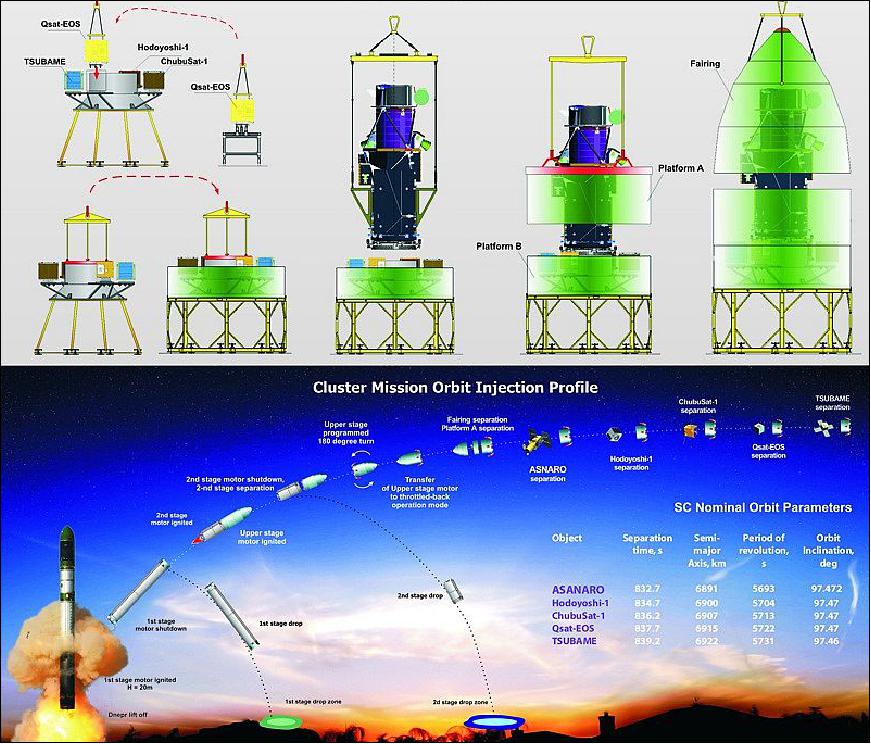
The ASNARO-1 spacecraft was launched on November 6, 2014 (07:35:49 UTC) on a Dnepr-1 vehicle (RS-20) from Dombarovsky (Yasny), Russia. The launch provider was ISC Kosmotras. The launch was executed by the Russian Strategic Rocket Forces of the Russian Ministry of Defense with the support of the Russian, Ukrainian and Kazakhstan organizations, which are part of the ISC Kosmotras industrial team. 23) 24)
Originally, the launch of ASNARO-1 was planned on Japan's new Epsilon solid rocket in 2011, according to METI's initial development schedule. However, both the Epsilon and ASNARO projects were hit by budget shortfalls in 2010, delaying both projects, and making the Epsilon unavailable for a 2012 launch. 25)
Orbit: Sun-synchronous orbit, nominal altitude = 504 km, inclination = 97.4º, LTDN (Local Time on Descending Node) = 11:00 hours.
The secondary payloads on this flight are:
• ChubuSat-1, a microsatellite (50 kg) of Nagoya University and Daido University, Japan
• Hodoyoshi-1, a microsatellite (60 kg) of the University of Tokyo and NESTRA (Next Generation Space System Technology Association)
• QSat-EOS, a microsatellite (49 kg) Kyushu University (KU), Fukuoka, Japan.
• Tsubame, a microsatellite (49 kg) of Tokyo Institute of Technology, Tokyo University of Science and JAXA.
Mission Status
• June 2016: One of the features of the ASNARO mission, it provides high-resolution and high-accuracy imagery for the users. Therefore, the orbit maintenance and high accuracy orbit determination is very crucial. The ASNARO orbit is a sun-synchronous sub‐recurrent orbit with the altitude of 504 ± 2 km, orbit inclination of 97.42 ±0.1º and the eccentricity is 0.00125±0.0008. Also, the satellite is operated in a nominal local time of descending node of 11:00 hours ± 15 min. The purpose of traditional orbit control is to maintain specified orbit. On the other hand, PASCO has expertise in creating the NSDI (National Spatial Data Infrastructure) and processing and analysis of aerial photos and the satellite imagery. Therefore our purpose is to control precisely the orbit and perform the analysis for providing high-quality image. 26)
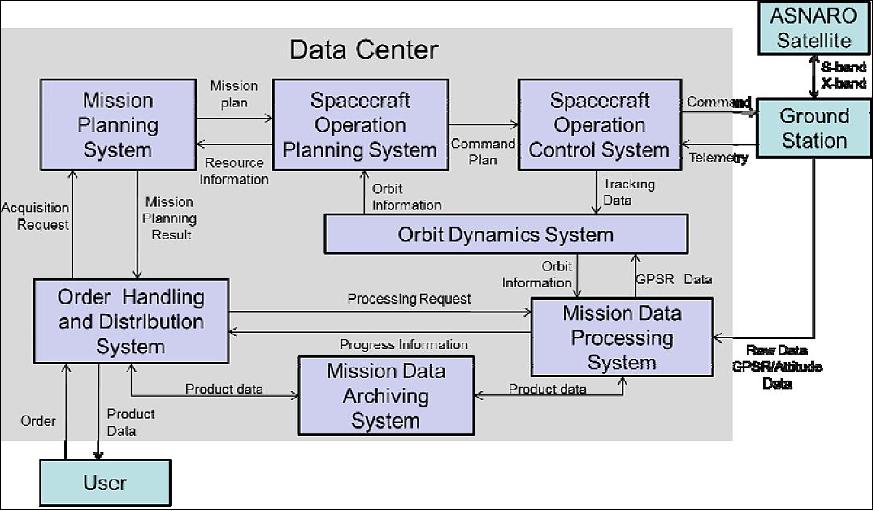
- Figure 22 shows ASNARO ground station system architecture. ASNARO ground station consists of "mission operation system" with mission planning and data processing, and "spacecraft operation system" with operation planning and orbit control. The orbit processing procedure features the following steps:
1) The ASNARO downlink of the GPS orbit information to the Ground Station
2) The Ground Station transfers the GPS orbit information to the Mission Data Processing System
3) The Mission Data Processing System transfers the GPS orbit information to the Orbit Dynamic System after changing format
4) The Orbit Dynamic System generates the orbit determination value base on the GPS orbit information
5) The Orbit Dynamic System generates the real orbit base on the orbit determination value
6) The Orbit Dynamic System generates the predicted orbit base on the real orbit
7) The Orbit Dynamic System provides the predicted orbit to the Spacecraft Operation Planning System and Mission Data Processing System. Also,it provides the TLEs (Two Line Elements) to the Ground Station after mean processing of the predicted orbit.
- The ASNARO Ground Segment does the orbit determination twice per day. Therefore , it's running operation by the high accuracy orbit.
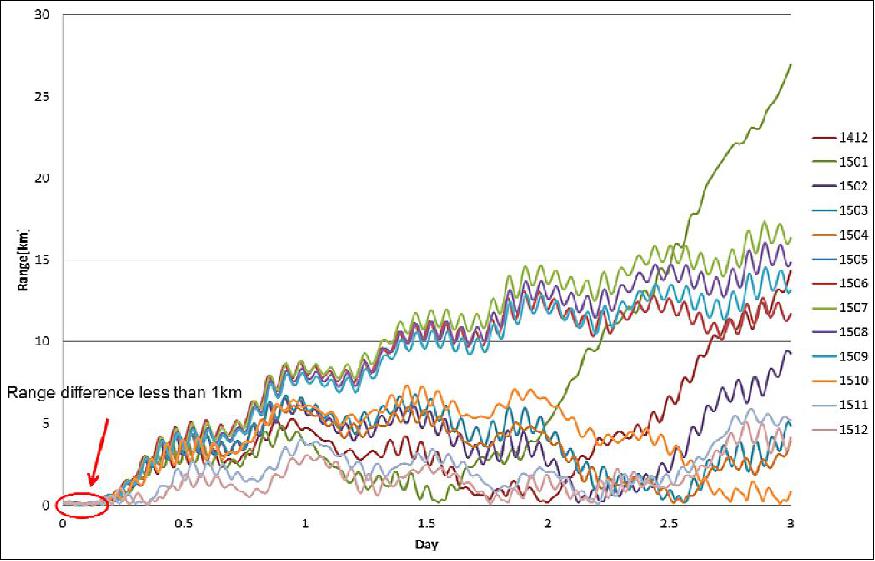
- Accuracy comparison of TLE generated by ASNARO ground system and the determinate orbit ASNARO. — The ground station uses the TLE for the ASNARO ground segment to calculate the orbit information. Figure16 shows the difference of the TLE orbit for each month and the predicted orbit for each month. In Figure16, the difference of the TLE orbit and the predicted orbit maintained 1km least for 5.5 hours and at maximum for 10 hours within the 1km from TLE epoch. For this reason, the project concludes that the orbit dynamic system running the mean processing is using the trajectory 6 of the predicted orbit. The orbit dynamic system makes the TLEs by mean processing of a 6 lap orbit. Therefore the distance difference of the appropriate time zone is low.
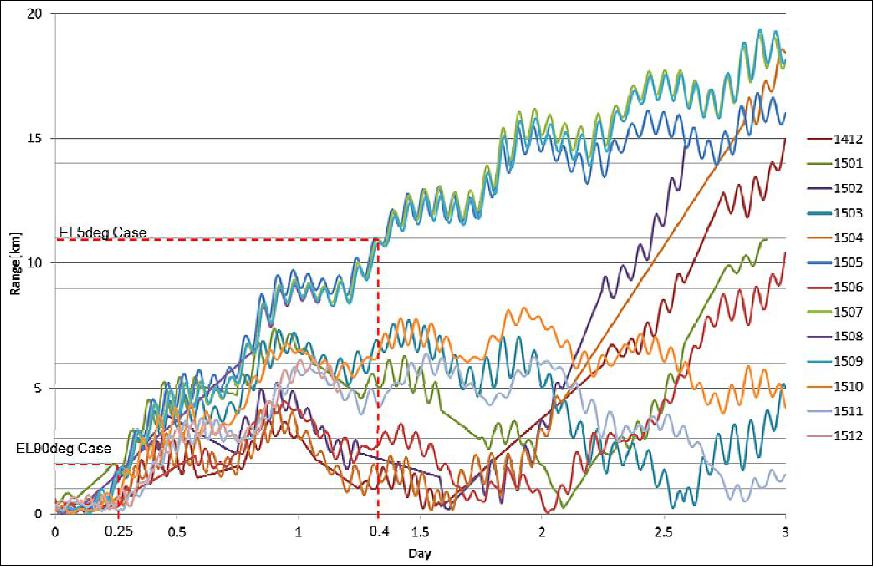
- Figure17 shows the difference of the TLE orbit of each month and real orbit. Several result maintain a distance difference of < 1km same as the predicted orbit for about 6 hours. But, some were confirmed in Figure17 that are immediately separated from the real orbit after the generation.
- The ASNARO ground segment is providing the TLE values twice per day for a successful downlink at an elevation angle of 90º. The corresponding epoch is UTC 0:00 and UTC12:00.
- In summary, the evaluation of predicted orbit, the difference between the long-term orbit and the determinate orbit, the evaluation of orbit maneuver discussed. For the project, it is very important not only to operate the satellite but also to control the satellite orbit. The ASNARO orbit is being controlled by the Orbit Dynamics System developed at PASCO. This system is automatically providing the orbit determination, orbit prediction, and provision of the orbit to auxiliary systems everyday (Ref. 26).
• June 2016: Within the ASNARO project, the spacecraft portion manufactured by NEC and the ground segment was developed by PASCO. This small Earth observation satellite is operated by PASCO as the first private company in Japan. 27)
- Considering the current trends, the Earth observation satellites are required flexibly to acquire the imagery for the user's specific requirement and to distribute high quality image data with near real-time delivery. Mission planning of PDC (PASCO Data Center) has been developed under the concept that is able to accept the acquisition orders before AOS -30 minutes and deliver the products within an hour from imagery acquisition to fulfill this requirement. The system has been running in automatic operation based on the initial concept as the low cost-effective system.
- The first image was acquired on November 14, 2014 and the image calibration and validation phase has been completed over several months. After the completion of the calibration phase, the imagery was validated by the Japanese governmental organizations. The PDC has all the necessary functions in support of the satellite bus operation, mission operation, image processing, etc.
- After the successful launch, the satellite was injected into the planned orbit. This was followed by the initial on-orbit check-out.
Activity Phase or Operation Event | Satellite Segment | Ground Segment |
2008 | Design Phase | - |
2009 | Design & Manufacturing Phase | Design Phase |
2010 | Manufacturing of System | Design Phase |
2011 | System Comprehensive Testing | Development & Manufacturing of System |
2012 | Compatibility Testing | |
2013 | Operating Training Phase | |
November 6, 2014 | ASNARO-1 Launched onDnepr vehicle | |
November 6-16, 2014 | LEOP (Launch and Early Orbit Phase) | |
November 14, 2014 | First image acquired | |
November 16 – March 31 (FY 2015) | Imaging Calibration Phase | |
April 1, 2015 | Start of Nominal Operations | |
• According to the WMO, the ASNARO mission is operational in 2015. 28) — However, I was not able to find any update of the mission by the NEC Corporation, nor was I able to contact anyone of the project at NEC.
Sensor Complement
The payload of ASNARO consists of OPS (Optical Sensor), data recorder, and X-band data transmitter subsystems.
OPS (Optical Sensor)
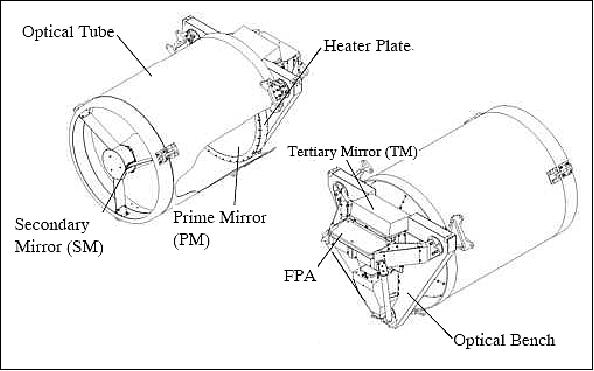
OPS is a compact pushbroom instrument developed by NEC and NTSpace (NEC Toshiba Space Systems Ltd.). The design introduces the following technologies: 29)
• Optics subsystem: Use of a TMA (Three Mirror Anastigmat) telescope
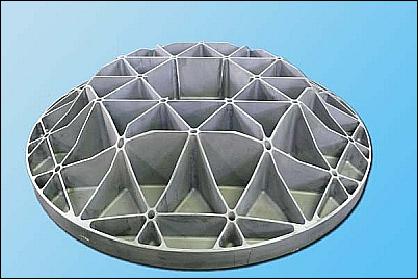
• The primary mirror is made of NTSIC (New Technology Silicon Carbide). SiC is considered the most suitable material of spaceborne telescope mirrors, because of high stiffness, low thermal expansion, high thermal conductivity, low density and excellent environmental stability. Newly developed high-strength reaction-sintered SiC, which has two to three times higher strength than a conventional sintered SiC, is one of the most promising candidates in applications such as lightweight substrates of optical mirrors, due to being fully dense and having small sintering shrinkage (±1 %), and low sintering temperature. 30)
Observation method | Pushbroom |
Spectral range | VNIR (Visible Near Infrared) |
Spectral bands | Panchromatic:1 |
GSD (Ground Sample Distance) | Pan: ≤ 0.5 m |
Swath width | 10 km at nadir |
Data quantization | 12 bit |
CCD detector with TDI (Time Delay Integration) capability | for Pan and MS |
Instrument mass, power | 96.7 kg, ~ 140 W |
In Feb. 2009, the Goodrich Corporation (Charlotte, N. C., USA) was awarded a contract to provide optical sub-assemblies for the new OPS telescope.
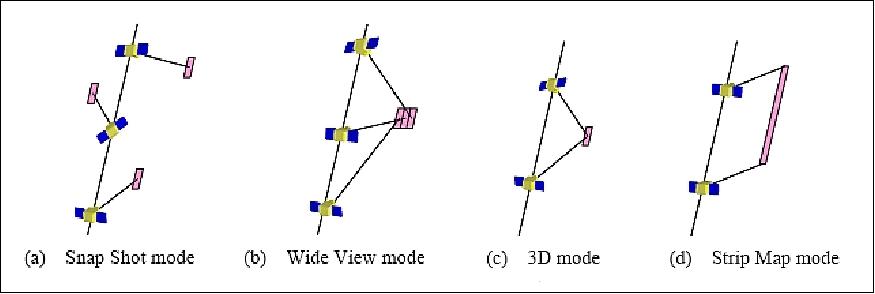
Observation Modes
The spacecraft AOCS provides the following observation modes:
8) Snap shot mode: In this mode it is possible to acquire the nominal 10 km x 10 km area's image. At the moment of imaging, the satellite body is controlled to be fixed to inertial space.
9) Wide view mode: This mode is being used to provide wide area images along with a few sets of neighboring snap shot images.
10) 3D mode: This mode is used to acquire the stereo imagery of the target area. In this mode, the observations are performed from two different orbital positions to obtain 3-dimensional information of the target area.
11) Strip map mode: In this mode, it is possible to acquire zonal imagery - a continuous image with a maximum length of 850 km and a width of 10 km.
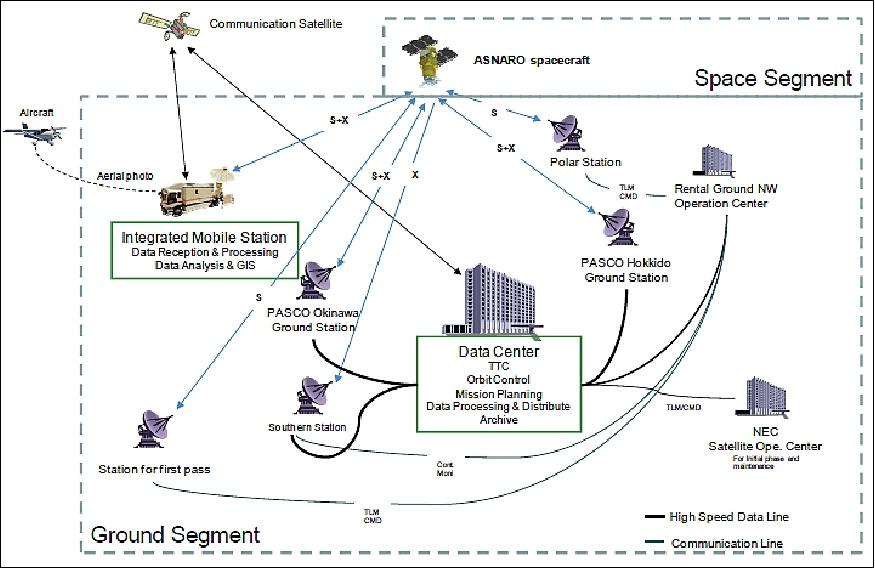
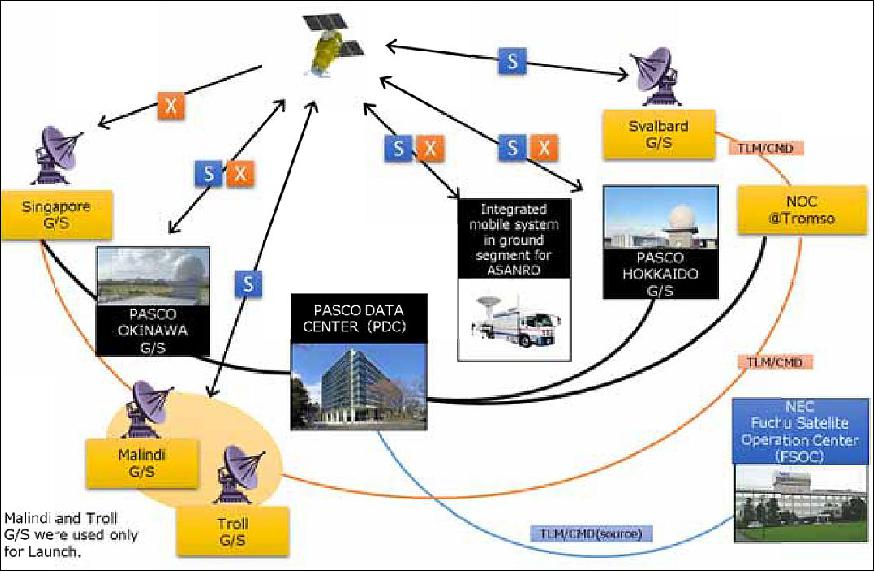
Ground Segment
The ground segment consists of the data center, the integrated mobile station and the ground stations. The ASNARO spacecraft will be operated and controlled by mainly the data center and two ground stations, located in Okinawa and Hokkaido, Japan. Additionally, a rental ground station network will be utilized to support the LEOP (Launch and Early Orbit Phase) of the spacecraft and to develop to provide commercial services of the ASNARO data all over the world. The ground segment is being developed by PASCO Corporation of Tokyo, Japan. 31)
Data Center: In the data center, monitoring and control of orbit and attitude of the satellite, planning and management of the satellite bus operation plan, reception and management of imaging plan, processing of the image data and storage and management of the product will be performed. The data center is being newly constructed for ASNARO system with the concepts of compactness, self-automation, high speed and user oriented aspects.
Concept | Measures and effects |
Compact | By adapting virtualization of operating system, storage and network, drastic downsizing is realized. Except data storage system, whole system can be stored in only one rack. |
Automation | From the order acceptance to the product delivery, the nominal operation is fully automated. Thanks to the automation, number of the operators required is minimized to four. Even in case of hardware failure, the system is designed to automatically recover itself. |
High speed | For image processing, parallel distributed processing by cloud computing is performed. Each processing program is optimized for the latest multi-core CPU by modifying the existing algorithm. Image products will be delivered within one hour after data acquisition. |
User oriented | With web service interface, an end-user can request a new image acquisition to the satellite in addition to purchase of archived images. With this feature, it is easier for an end user to request a new image acquisition. |
Configuration of the Data Center: The data center is composed of 7 systems (Figure 22). These are:
1) Order Handling and Distribution System: This system accepts and handles acquisition request and send them to Mission Planning System as data acquisition requests. The status of the requests is provided to end-users. Based on the acquisition requests, it performs planning of the acquisition and the planning is sent to Mission Data Processing System. The processing status is notified to end-users.
2) Mission Planning System: The system receives the acquisition requests from end-users via Order Handling and Distribution System and plans the acquisition planning.
3) Mission Data Processing System: The system performs the geometric correction of the image data according to the processing planning from Order Handling and Distribution System and the stores the data into Mission Data Archiving System.
4) Mission Data Archiving System: The system manages the archiving and backup of all processed image data.
5) Spacecraft Operation Control System: The system receives the telemetry data demodulated at the ground station and provides the information for monitoring the status of the satellite to the operators. Also, it receives the planning of the satellite bus operation and the planning of image acquisition and transforms them into the satellite commands, which are transmitted to the ground station for uplink. Status of the command uplink can also be monitored.
6) Orbit Dynamics System: The system calculates the orbit of the satellite with high accuracy using the data of GPS receiver on the satellite and performs the orbit control for keeping the satellite to the nominal orbit. Based on the calculated orbit data, it also calculates and provides the information necessary for the satellite operation (such as AOS/LOS times of each ground station, maneuver planning, event information, position of the other interfering satellites, Sun and Moon) to each system.
7) Spacecraft Operation Planning System: The system performs the planning of the satellite orbit control by using orbit parameter, etc. from Orbit Dynamics System and the planning of the maintenance of the solar array paddle and the battery by using the position of the Sun. It also performs the operation planning of each ground station by using availability of ground station and the control operation based on the satellite telemetry data. Besides, it has functions to check satellite resources.
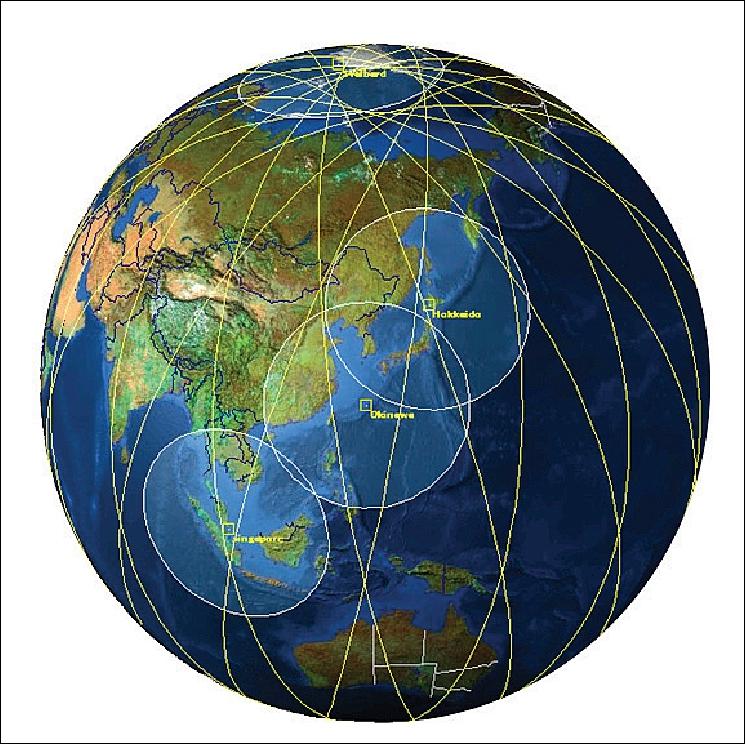
The ground network for ASNARO system will consist of ground stations in Hokkaido, Okinawa, Singapore and Svalbard (Figure 21). Each ground station will be equipped with receivers which can demodulate the 16 QAM signal used by ASNARO. Each ground station will be connected to the data center with high speed network. In addition to this ground network, customer ground stations and integrated mobile stations will also be available as part of ASNARO ground stations' network.
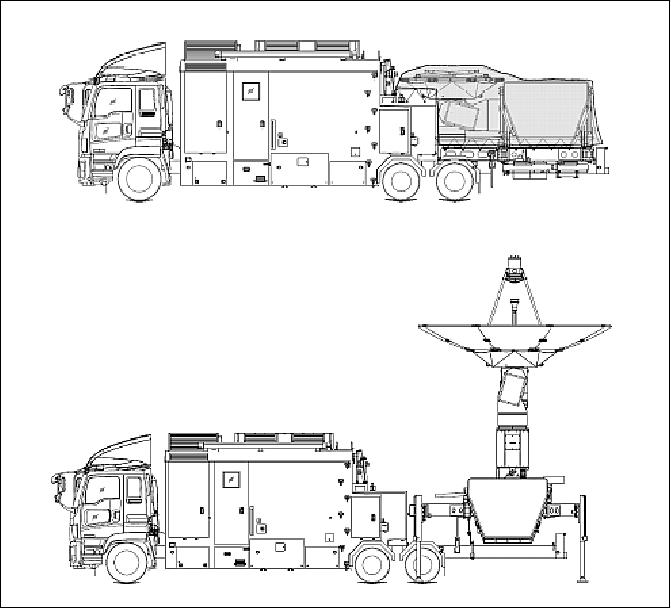
Features of Integrated Mobile Stations: An integrated mobile station is comprised of a ground system including the 4.6 m diameter antenna on the truck. It is an all-in-one system with all functions necessary for the satellite operations, e.g. mission control, mission planning, ground station, mission data processing and GIS (Geographic Information System). The main objective is to provide emergency response in case of disaster and image data reception all over the world. It's a cost effective, compact in size and high performance system.
To meet these requirements, the integrated mobile station is being developed with the concept of being compactness, labor saving, adaptive environment, modularized, low cost and quick data delivery.
Concept | Measures and effects |
Compact | Realization of the downsizing in system and operation by mounting 4.6 m diameter antenna and control/processing devices together on a truck. This enables the shortening of manufacturing and cost reductions. |
Labor saving | By improving the operational devices and optimizing the functional layout, the integrated mobile station can be set up with only a few people in a short time. All systems are fully automated for nominal operation so that all the operation including the setup of the antenna can be done with only two operators. |
Operational environment | The integrated mobile station is designed to operate in various environments. It can be operated in a high-humid without get rusted thanks to its construction material and its painting. |
Modularized | The systems are modularized both in hardware and in software. By the combination of these modules, customization of the system according to the user's needs is enabled. |
Configuration of an Integrated Mobile Station: An integrated mobile station has 4.6m diameter antenna for satellite tracking and shelter room having houses processing systems on the truck. Roughly, it has functions of the data center and the ground station. The newly developed outrigger dedicated for the antenna reduces the swift of the antenna and enables the tracking on the satellite even under strong wind condition. In the shelter room, devices for antenna system and processing servers are stored in 3 racks which allows the operator large working space.
It has a Data Integration and Solution System, which integrates the satellite image data with other data sources and provides the analyzed data. It is also equipped with an A0 plotter to print out the images and analyzed data for the onsite information sharing. For the communication with external, it has mobile data communication system and satellite communication system. The shelter room protects the operator working inside from the radio transmission from the antenna. Inside the shelter room is fully air-conditioned to keep the operational temperature and humidity of computers and equipments. It is equipped with lightning rod to protect the antenna and the truck from lightning and anemometer to monitor the wind speed (Figure 24).
Function | Description |
Mission control | Command generation, telemetry analysis |
Mission planning | Mission planning, data acquisition request |
Ground station | S-band uplink, S-band downlink, X-band downlink |
Image processing | High speed processing: of Level 1 image, ortho-image, pan-sharpen image and DSM (Digital Surface Model) |
External data integration and analysis | Integration of external data , e.g. GIS data, into satellite imagery and creation of analytical map |
Innovative connectivity of the space segment and the ground segment
The developed innovative connectivity of the space segment and ground segment will enhance the operation capability and comparable to large scale satellites.
Improved acquisition capability: For attitude control of the satellite, 3-axis reaction wheels are utilized. In addition to the agility by using reaction wheels, the ground segment will have improvements for the acquisition efficiency, acquisition chances and success rate of the acquisition.
1) Acquisition efficiency: The ASNARO spacecraft has several acquisition modes. The basic acquisition mode is the Snapshot mode (10 km x 10 km). However, depending on the largeness or shape of the area of interest, it is more efficient to use the StripMap mode or the Skew mode. In the ground segment, based on the area of interest (AOI) requested from the end-user, the optimum acquisition mode is automatically selected and a most efficient acquisition plan is programmed. In the planning, the satellite resources (storage and power) are considered to optimize the acquisition planning in mid to long term.
2) Acquisition chances: By optimizing and speeding up the process from mission planning to the command generation, it is possible to accept the acquisition request from end-users until 30 minutes before uplink. This enables to implement an acquisition plan just before the image acquisition in case of an emergency and leads to the improvement of acquisition chances. From mission planning to the uplink, every process is automated and nominally no operator action is required.
3) Acquisition success rate: In the mission planning process, target candidate areas which are likely to be covered by less cloud are preferably selected according to the weather forecast and observatory data to improve the acquisition success rate. As mentioned above, the final deadline for the image acquisition request is 30 minutes before uplink. By utilizing high latitude ground station, in nearly all around the world it is possible to refer the weather information 30 minutes to 2 hours before image acquisition. By using global numerical weather prediction models as reference information, prediction accuracy for one hour later weather is better than 90% and the improvement of acquisition success rate is expected. It is also possible to add different kinds of weather data as add-on.
Improved data delivery: To reduce the power consumption of the satellite, image acquisition and downlink are separately performed. The communication speed of ground network and image processing speed are improved which lead to a highly efficient data delivery.
1) Communication speed of ground network: By connecting ground stations and the data center by high speed Wide Area Ethernet of up to 1 Gbit/s which is as fast as the downlink rate of ASNARO (16QAM, ~800 Mbit/s), real-time data transmission from the satellite to the data center is realized.
2) Image processing speed: To perform distributed processing of raw image data utilizing the multi-core CPU, products required by end-users can be generated in short time. Overview of the product generated by this system and targeted processing time is shown in Table 8. For any product, the target time for the delivery to end user is less than one hour from image acquisition.
Product level | Overview | Targeted processing time 32) | |
Time | Cumulative Time 33) | ||
Level 0 | Decoded data in CCD unit | 42 s | 42 s |
Level 1A | Radiometrically corrected data in CCD unit | 60 s | 102 s |
Level 1B | Radiometrically and geometrically corrected and merged CCD unit data. | ||
Pan-sharpen | Panchromatic and multi-band images in Level 1B or Ortho are merged to generate colored high resolution data which is called Pan-sharpen. | 60 s | 162 s 34) |
Ortho | Ortho-rectified data from Level 1B product and digital elevation model. | 90 s | 192 s |
DSM (Digital Surface Model) | DSM generated from images acquired in 3D mode and RPC (Rational Polynomial Coefficients) file. | 180 s | 282 s |
Product accuracy: In the ground segment, in addition to orbit and attitude information from the satellite, external information is used to perform correction processing with high accuracy and pixel localization accuracy as good as large sale satellites. The targeted localization accuracy is less than 10 m (CE90) for Level 1B product. The approach for that is described in the following.
1) Introduction of "Precise Position Determination System": The star tracker calibration, estimate of optical sensor directional alignment and precise attitude determined value processing is performed in the ground segment to reduce the error between the attitudes of optical sensor, internal error of optical sensor and error of attitude determination. This enables the improvement of pixel localization accuracy.
2) Initial calibration and periodical calibration: During commissioning phase and nominal operation phase, evaluation result of the product accuracy will be statistically processed and by correcting the parameter the product accuracy will be improved. For the product evaluation, GCPs (Ground Control Points) prepared for the calibration will be used as true value. The evaluation using GPSs will be performed over the whole earth. This is to provide the product in any area with same accuracy.
3) Construction of reference GCP database: By constructing reference GCP database over the entire earth and performing fully automatic matching with acquired image data and image correction, localization accuracy of the product will be drastically improved.
References
1) Toshiaki Ogawa, Keita Miyazaki, Osamu Itoh, "System outline of small standard bus and ASNARO spacecraft," Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-IV-2
2) Koichi Ijichi, Shoichiro Mihara, Masatsigu Akiyama, Keita Miyazaki, Toshiaki Ogawa, Yoshito Narimatsu, Osumu Itoh, "Introduction and the Outline of the ASNARO Project (Advanced Satellite with New system ARchitecture for Observation)," paper: 2009-t-04, Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009
3) Kenichi Saito, Toshiaki Ogawa, Keita Miyazaki, Masatsugu .Akiyama, Osamu Ito, "System outline of the Advanced Satellite with New system ARchitecture for Observation (ASNARO," Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-n-05
4) Koichi Ijichi, Shoichiro Mihara, Keita Miyazaki, Masatsigu Akiyama, Toshiaki Ogawa, Osumu Ito, "Project Outline of the Advanced Satellite with New System Architecture for Observation (ASNARO)," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.7.6
5) "Project Outline of the Advanced Satellite with New System Architecture for Observation (ASNARO)," The 22nd Microelectronics Workshop, October 15-16, 2009, Tokyo, Japan, USEF
6) Toshiaki Ogawa, Tetsuo Fukunaga, Shoichiro Mihara, "The overview of Japanese small earth observation satellite program ASNARO (Advanced Satellite with New System Architecture for Observation)," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
7) Tsuyoshi Oishi, "Introduction to NEXTAR System," APSCC (Asia-Pacific Satellite Communications Council) Quarterly Newsletter, Q1 2011, pp. 8-12, URL: http://www.apscc.or.kr/upload/pdf/Q1%202011.pdf
8) "NEC Space Business Overview," The 2nd Japan-Arab Economic Forum, Tunis, Tunisia, December 12, 2010, URL: http://www.jccme.or.jp/english/jaef2_overview/meeting/session4/workshop6/36_w6.pdf
9) Toshiaki Ogawa, Yusuke Kobayashi, Shoichiro Mihara, Koichi Ijichi, Hideyuki Hamada, "Outline and Progress of ASNARO (Advanced Satellite with New System Architecture for Observation) Satellite System," 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011
10) Toshiaki Ogawa, "Development of the ASNARO, an Advanced Space System," URL: http://www.nec.co.jp/techrep/en/journal/g11/n01/110108.pdf
11) Tomoki Takegai, Masaki Tanaka, Toshiaki Ogawa, Tsuyoshi Oishi, Shoichiro Mihara, "The overview of advanced small type standard bus system of NEXTAR and ASNARO satellite using NEXTAR bus," Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12.D1.4.8
12) "ASNARO," NEC, 2012, URL: http://www.nec.com/en/global/solutions/space/satellite_systems/asnaro.html
13) Yusuke Kobayashi, Toshiaki Ogawa, "Multiple Applications of NEXTAR Platform to Earth Observation Represented by ASNARO Satellite Series," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
14) "ASNARO : Advanced Satellite with New system Architecture for Observation," Japan Space Systems, URL: https://web.archive.org/web/20180610131257/http://www.jspacesystems.or.jp:80/en_project_asnaro/
15) Toshiaki Ogawa, "Development of the ASNARO, an Advanced Space System," NEC, URL: http://www.nec.com/en/global/techrep/journal/g11/n01/pdf/110108.pdf
16) Hiroki Hihara, Toshiaki Ogawa, Kenji Kitade, "NEXTAR: Small Satellite Bus Based on SpaceWire Deterministic Implementation," Proceedings of the International SpaceWire Conference 2011, San Antonio, TX, USA, Nov. 8-10, 2011, URL: http://2011.spacewire-conference.org/proceedings/Presentations/Missions/Hihara.pdf
17) Hiroki Hihara, Shuichi Moriyama, Tasuya Takezawa, Yuji Nishihara, Masaharu Nomachi, Tadayuki Takahashi, Takeshi Takashima, "Designing SpaceCube 2 with ELEGANT Framework," International SpaceWire Conference 2008, Nara, Japan, Nov.4-6, 2008, URL:
http://2008.spacewire-conference.org/downloads/Papers/Test%20&%20Verification%202/Hihara.pdf
18) Tadayuki Takahashi, Takeshi Takashima, Seiichi Fukuda, Satoshi Kuboyama, Masaharu Nomachi, Yasumasa Kasaba, Takayuki Tohma, Hiroki Hihara, Shuichi Moriyama, Toru Tamura, and Space Wire User's Group in Japan, "Space Cube 2 - an Onboard Computer based on Space Cube Architecture," International SpaceWire Conference 2007, Dundee, UK, Sept.17-19, 2007, URL of presentation: http://spacewire.computing.dundee.ac.uk
/proceedings/Presentations/Onboard%20Equipment%20and%20Software/takahashi.pdf
19) Hiroki Hihara, Masashi Uo, Masaaki Iwasaki, Toru Tamura, Shuichi Moriyama, Naoki Ishihama, Masaharu Nomachi, Tadayuki Takahashi, Takariho Yamada, "Space Cube 2 Software Design Kit (SDK)," International SpaceWire Conference 2010, St. Petersburg, Russia, June 22-24, 2010, URL: http://2010.spacewire-conference.org/proceedings/Papers/Posters/Hihara.pdf
20) Takashi Fujimura, Tsunekazu Kimura, Toshiaki Ogawa, "Small Optical Sensor Satellite ASNORO and series of small Earth Observation Satellites," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
21) Hidekazu Masuda,, Kenta Okamoto, Atsushi Nakajima, Masaharu, Itoh, Hiroshi , Arai, , "Development of Antenna Pointing Mechanisms for Small Satellite," 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011
22) Hidekazu Masuda, "Development of Antenna Pointing Mechanisms for Small Satellite," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-j-24s
23) "Dnepr Launch of ASNARO and 4 piggyback microsatellites," ISC Kosmotras, Nov. 6, 2014, URL: https://web.archive.org/web/20220529124048/http://www.kosmotras.ru/en/Launch18/
24) "Dnepr launches five Japanese satellites," Russia in Space, Nov. 6, 2014, URL: http://www.russianspaceweb.com/dnepr_asnaro.html
25) Paul Kallender-Umezu, "Japan Delays ASNARO-1 a Year, Switches to Russian Rocket," Space News, June 27, 2011, p. 12 URL: http://www.spacenews.com/earth_observation/110627-japan-delays-ansaro-year.html
26) Yuzo Tamaru ,Kazuki Miyashita,Tetsuo Fukunaga,Akio Oniyama, "The orbit maintenance and maneuver of ASNARO satellite," Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, Paper: AIAA 2016 2562, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2562
27) Ryutaro Kasai, Akio Oniyama, Tetsuo Fukunaga, "User-oriented Operation of ASNARO," Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, Paper: AIAA 2016 2581, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2581
28) "Satellite: ASNARO-1," OSCAR, WMO (accessed on Feb. 7, 2016), http://www.wmo-sat.info/oscar/satellites/view/467
29) Shouji Morioka, Seiji Kanda, Hiroshi Irikado, Katsuhiko Tsuno, Kazuhiko Oono, Tamio Nakashima, Takashi Sakashita, Yoshito Narimatsu, Toshiaki Ogawa, Shoichiro Mihara, Osamu Itoh, "Development of A High-resolution Optical Imager for Small Satellite", 27th International Symposium on Space Technology and Science, Tsukuba, Japan, July 5-12, 2009, paper: 2009-n-06
30) K. Tsuno, H. Irikado, K. Ono, "NTSIC: progress in recent two years," SPIE Optics and Photonics Conference, San Diego, CA, USA, Aug. 26-27, 2007, SPIE Vol. 6666
31) Shuhei Hikosaka, Tetsuo Fukunaga, Toshiaki Ogawa, Shoichiro Mihara, "Advanced EO system for the Japanese Small Satellite ASNARO," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-IV-4, URL:
http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1128&context=smallsat
32) Processing time for one Snapshot scene (10 km x 10 km)
33) Cumulative processing time from raw data
34) In case of Level 1 B pan-sharpen
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top