BIRD (Bi-Spectral Infrared Detection)
EO
Mission complete
Imaging multi-spectral radiometers (vis/IR)
Land
The Bi-Spectral Infrared Detection (BIRD) was an Earth Observation satellite operated by the German Aerospace Centre (DLR). Its overall objective was to observe thermal processes on the Earth’s surface. This permits environmental impact studies and natural disaster monitoring. A secondary objective of the satellite was to demonstrate new microsatellite technologies.
BIRD was launched in October 2001, as a secondary payload on the Indian Space Research Organisation (ISRO)’s PSLV0C3 launcher, and ended its operations in December 2005.
Quick facts
Overview
| Mission type | EO |
| Agency | DLR |
| Mission status | Mission complete |
| Launch date | 22 Oct 2001 |
| End of life date | 31 Dec 2005 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance |
| Measurement detailed | Land surface imagery, Fire temperature, Vegetation type, Fire fractional cover, Earth surface albedo, Active Fire Detection |
| Instruments | WAOSS-B, HSRS |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See BIRD (Bi-Spectral Infrared Detection) summary |

Summary
Mission Capabilities
The satellite carried three monitoring instruments. The Wide Angle Optoelectronic Stereo Scanner, BIRD version (WAOSS B) had a primary function in vegetation monitoring and exploration applications, but its in-track stereo capability could also be used for cloud investigations. BIRD’s Hot Spot Recognition Sensor (HSRS) could detect ground surface hotspots and its High Optical Resolution Utility Sensory (HORUS) was an optional sensor for verification tasks of the Attitude and Orbit Control System (AOCS) performance of BIRD
Performance Specifications
HSRS measured Middle Wavelength Infrared (MWIR) and Thermal Infrared (TIR) band wavelengths, while WAOSS-B measured red and Infrared (IR) wavelengths and HORUS measured blue to low IR wavelengths. HSRS had a FOV resolution of 2.22 arcmin and 19° cross-track, with a ground pixel size of 372 m and swath width of 190 km. WAOSS-B had a FOV resolution of 1.11 arcmin and 50° cross-track, but also ±25° along-track. Its ground pixel size was 185 m while its swath width was 533 km. HORUS had a FOV resolution of 5.35 arcsec and 1.6° cross- and along-track. HORUS’ ground pixel size was 14.6 m, with a swath width of 15 km. Observations could be made for approximately 10 minutes per orbit.
The satellite followed a sun-synchronous circular orbit at an altitude of 572 km and an inclination of 97.7°.
Space and Hardware Components
BIRD successfully demonstrated and validated several new technologies: a failure-tolerant onboard computer system with its own operating system, a high-precision microsatellite reaction wheel, a microsatellite star camera, a state space representation-based attitude control system, an onboard navigation system, and low-cost ground stations.
The spacecraft bus was modular and was composed of aluminium and honeycomb structures. Attitude control was achieved through the interfunctioning of two ASTRO-15 (Autonomous Star Sensor) sensors, an autonomous attitude determining processor, a 3-axis laser gyroscope, three pairs of magnetorquers, and four new high-performance reaction wheels. Real-time orbit determination was achieved by GPS Embedded Module III (GEM S) and thermal control for all subsystems, bar the IR imager, was passive, through the use of two radiators, MLI (Multilayer Insulation) blankets, and low-conductivity stand-offs. Heat removal from the IR instrument was provided by a separate IR radiator. RF communications were carried out in S-band. Downlink transmitter frequency was at 2201.7 Hz, with a data rate of 2.2 Mbit/s and PCM/BI-F-L/BPSK modulation, while Uplink transmitter frequency was at 2032.5 MHz, with a data rate of 19.2 kbit/s and PCM/GMSK/PM modulation.
In February, 2004, the ACS gyros malfunctioned, and from this point only sun sensors could be used for attitude sensing.
BIRD (Bi-Spectral Infrared Detection)
Overview
BIRD is a DLR (German Aerospace Center) microsatellite technology demonstration mission with the overall objectives to observe fires/hot spots on Earth (caused by lightning, volcanism, oil wells, smoke/water-cloud discrimination, and by man) to permit environmental impact studies. Secondary objectives involve technology demonstrations, namely the operation of a new type of infrared sensor system on a microsatellite and on-board preprocessing techniques. 1) 2) 3) 4) 5) 6) 7)

Spacecraft
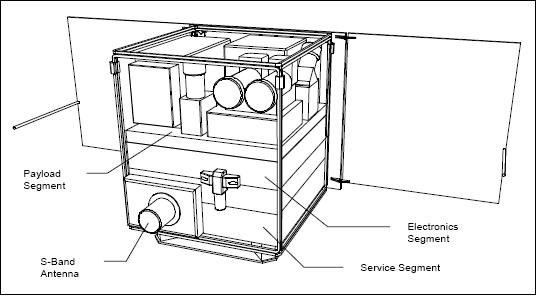
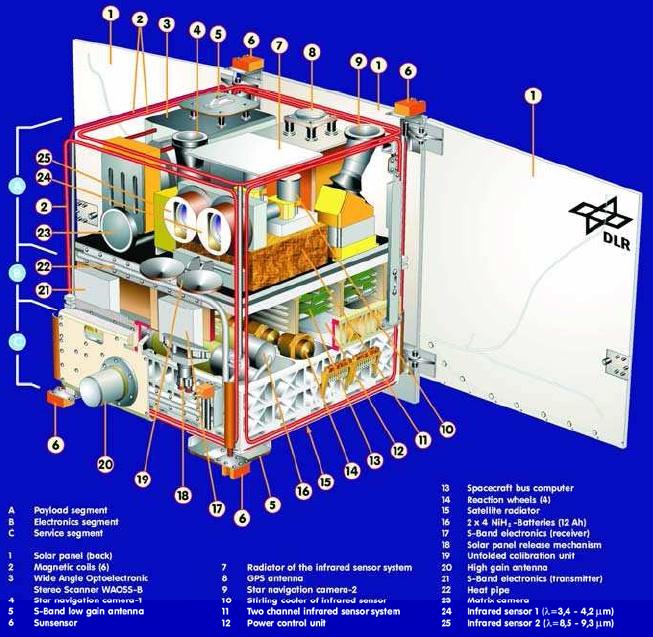
The S/C structure resembles a compact cube (side length of 62 cm, 1.6 m deployed length), consisting of the following segments: service, electronics, and payload, with one fixed and two deployable solar panels. The bus design is modular using low-mass aluminum and honeycomb structures. BIRD is three-axis stabilized, pointing toward nadir in observation mode with an accuracy requirement of ±5 arcmin, a pointing knowledge of ±0.2 arcmin per axis, and a slew rate of 1º/s. 8)
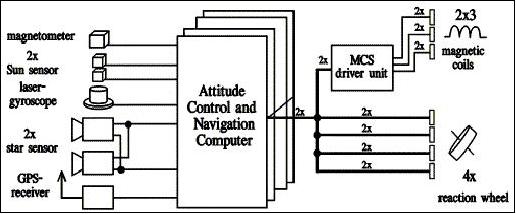
The S/C attitude is measured by two star sensors, pointing in directions that differ by 30º. The star sensor assembly is referred to as ASTRO-15 (Autonomous Star Sensor), it includes a processor for autonomous attitude determination. In addition, there is a 3-axis laser gyroscope providing a resolution of 2.7 arcsec with a drift rate of 1º/h. The actuators of the ACS (Attitude Control System) are: magnetorquers (3 pairs) and 4 reaction wheels. Based on the reaction wheel development of the Technical University of Berlin (TUB) a new type of high-performance reaction wheel for microsatellites was developed for BIRD in close cooperation between Astro- und Feinwerktechnik Adlershof GmbH, TUB, and DLR.
The S/C has a command-controlled body-pointing capability (of up to ±30º) into any direction. A GPS receiver, GEM-S (GPS Embedded Module III) of Rockwell-Collins, is used for real-time orbit determination. It is a five-channel C/A- and P-code for L1 signal tracking. The mass of GEM-S is 0.4 kg, power = 6.5 W.

An onboard navigation system (ONS) software package uses the GEM-S inputs to provide a) position information (<90 m) for WAOSS imagery, b) orbit information at 2 Hz sampling rates. ONS provides the instantaneous nadir and along-track direction for camera pointing as well as precise position values for real-time geocoding of the imagery. 9) 10) 11)
TCS (Thermal Control Subsystem): Thermal control of the spacecraft bus and payload components (except for the IR imager) is provided by passive means, namely the use of heat transfer elements - conductors and grooved heat pipes, thermally jointing the satellite segments. Two radiators, multilayer insulation (MLI) blankets and low-conductivity stand-offs provide the required temperature level. The heat removal from the IR instrumentation is realized by a separate IR radiator. 12)
Total S/C mass is 94 kg, average power is 40 W (200 W max), 8 NiH2 battery cells (12 Ah) provide power during orbit eclipse and peak power phases; the S/C design life is 1 year. The on-board recorder has a capacity of 2 x 1 Gbit.
Launch
The BIRD microsatellite was launched on Oct. 22, 2001 as a secondary payload on ISRO's PSLV-C3 launcher, along with TES (Technology Experiment Satellite) of ISRO as the primary payload, and PROBA of ESA as another secondary payload. 13)
RF communications are in S-band. The downlink transmitter frequency is 2201.7 MHz, the downlink data rate is 2.2 Mbit/s for recorder dumps during a station pass, and the modulation is: PCM/BI-F-L/BPSK. The uplink frequency is 2032,5 MHz, the data rate is 19.2 kbit/s, and the modulation is PCM/GMSK/PM.
Spacecraft operations are provided by DLR/GSOC using one tracking station. A CCSDS protocol suite is used for communications with the ground segment. 14) 15)
S/C operation modes:
• Sun-pointing mode. Most of the time the S/C is operated in sun-pointing mode (solar panels are normal to solar radiation) for energy accumulation.
• Earth-pointing mode G (coarse, downlink of data during station pass)
• Earth-pointing mode F (fine, remote sensing)
• On-board processing (and experimental classification) of sensor data
• Remote sensing or downlink at night-time
• In-flight calibration mode (pointing into deep space or to the moon)
The S/C instrument observations are limited to about 10 minutes per orbit (duty cycle of 0.1). This is estimated to be enough for disaster monitoring coverage. Outside of activity periods (observation and/or communication with the ground segment) the S/C is operated in sun-pointing mode.
Orbit: Sun-synchronous circular orbit, altitude = 572 km, inclination = 97.7º, local equatorial crossing time at 10:30 AM.
Mission Status
• In 2011, the BIRD spacecraft is still partly operational. The energy supply is difficult due to aging batteries with resulting safemode switchings of the satellite. DLR conducts limited mission operations with daily contacts to assess the satellite telemetry. The operation activities focus on subsystem health and long term trend analysis. 16)
• The spacecraft (launch Oct. 22. 2001) is only partially operational as of 2007. All onboard systems are functioning properly except for the crippled ACS (Attitude and Control Subsystem). Currently, DLR is conducting some limited mission operations (on a shoestring budget) in order to test the longevity of the onboard instrumentation, in particular the performance of the HSRS instrument. The low number of good-quality observation images that can be obtained implies further reductions in spacecraft operations for 2008 (for instance: monitoring only once per week). 17)
• BIRD operated nominally until Feb. 14, 2004. On this date, the gyros of the ACS experienced a malfunction (reception of wrong information from the gyroscope). As a consequence of this event, the reaction wheels tried to counteract the allegedly wrong attitude of the S/C, resulting in rather high spinning rates of BIRD - causing fairly soon the complete failure of the reaction wheels. 18)
• After this incident, the attitude of the S/C could only be sensed fairly coarsely mainly by the sun sensors. Momentum unloading and “attitude control” is now being substituted by the magnetic torquers which are located on the corners of the cubic structure. However, the performance of the weak torquers (not intended for this functional support service) is generally not sufficient to keep the S/C pointed into the nadir direction. Operational problems are encountered whenever insufficient solar energy is available due to adverse attitude conditions.
- The WAOSS-B imager is not being used any more; by design it can only be used exclusively in connection with the magnetic torquers.
- The HSRS (Hot Spot Recognition Sensor) infrared imager is functioning nominally and still being used almost daily to collect some imagery. However, only a portion of the imagery is suitable for processing and analysis, since the attitude cannot be maintained at all times as needed.
- Several attempts to rescue the mission via major software updates for an alternate attitude solution failed so far.
Technology Demonstrations
The following small-satellite technologies were demonstrated/validated with the BIRD spacecraft prior to the malfunction of 2004:
• A failure-tolerant onboard computer system with its own operating system
• A high-precision reaction wheel for microsatellites
• A star camera for microsatellites (1.2 kg)
• A state space representation based attitude control system
• An onboard navigation system
• Very low-cost ground stations.
The satellite control system allowed for a far reaching autonomous operation of the satellite and at the same time it ensured the survivability of the satellite with highest priority. The onboard computing system was realized as a distributed fault tolerant multi computer system which executes all control, telemetry, and monitoring tasks as well as the application dependent tasks. To achieve high dependability, safety, and lifetime, the onboard computer configuration consisted of four identical computers (nodes). The architecture of the redundant control computer is totally symmetric. That meant each of the nodes was able to execute all control tasks. Two of the computers were kept in continuous operation (one in hot redundancy); the other two nodes represent the cold redundancy. The new hardware technology was developed by FIRST (Fraunhofer Institute for Computer Architecture and Software Technology) in Berlin with the following performance characteristics: a power PC core, 66 MIPS, 8 MB SDRAM, 2 MB flash, real time operation system and a latch-up protection system. 19) 20) 21) 22)

Sensor Complement
HSRS (Hot Spot Recognition Sensor)
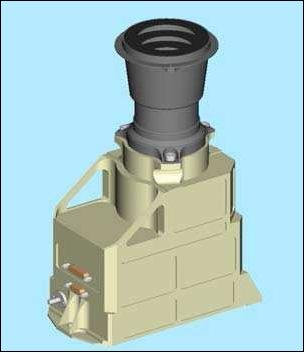
HSRS is a two-channel (MWIR, TIR) infrared imaging instrument, of IRCAM heritage (an airborne prototype imager), with the objective to detect ground surface hot spots. A pushbroom design is employed. The two spectral bands of 3.4-4.2 µm and 8.5-9.3 µm of the system use HgCdTe detector line arrays, each of 2 x 512 pixels. The detector are arrays of HgCdTe (GEC Marconi, UK) loophole diodes hybridized on a silicon CMOS multiplexer chip, both ranges are with an individual layout. The detectors are cooled to 80 K by an integrated cooler-detector unit of Stirling design. The two camera heads are integrated into an optomechanical structure for reasons of co-alignment. Inflight radiometric calibration is provided prior to each scene by measuring the aperture temperature. The geometric inflight calibration requires spacecraft pointing maneuvers to selected targets (space and ground). 23)


Parameter | HSRS | WAOSS-B | HORUS |
Spectral bands | 3.4 - 4.2 µm (MWIR band) | 600 - 670 nm forward | 450-890 nm |
F-number | 2.0 | 2.8 | 8 |
Focal length | 46.39 mm | 21.65 mm | 540 mm |
Pixel element size | 30 µm x 30 µm | 7 µm x 7 µm | 14 µm x 14 µm |
Nr of pixels | 2 x 512 staggered | 3 x 5184 (2884 illuminated) | 1024 x 1024 |
IFOV (resolution) | 2.22 arcmin | 1.11 arcmin | 5.35 arcsec |
FOV (cross-track) | 19º | 50º | 1.6º |
FOV (along-track) | NA | +25º, 0º, -25º | 1.6º |
Ground pixel size | 372 m (orbit altitude 575 km) | 185 m | 14.6 m |
Swath width | 190 km (orbit altitude 575 km) | 533 km | 15 km |
Data quantization | 14 bit | 11 bit | 14 bit |
Data rate | 957 kbit/s | 500 kbit/s | 1.8 MB/image |
Power consumption | 90 W electronics unit inclusive | 18 W | 1.7 W |
Instrument mass | 7.3 kg camera head + | 8.4 kg | 0.75 kg |
WAOSS-B (Wide-Angle Optoelectronic Stereo Scanner, BIRD Version)
The two-channel VNIR imager is a modified spare model of WAOSS flown on the Russian Mars-96 mission (launch on Nov, 17, 1996 from Baikonur; however, the S/C failed to obtain a Mars orbit).
The WAOSS instrument is a compact monoblade device consisting of camera head, electronic modules, and interface boards in one unit. The along-track stereo imaging system is based on 3 CCD-lines (single optics and focal plate), operating in pushbroom mode, and taking images simultaneously in the forward-, nadir- and backward-pointing direction of the orbital ground track. The convergence angle is 25º (angle between forward- and nadir-pointing directions, and angle between nadir and backward-pointing directions). New lenses with integrated filter and wide FOV were introduced. Other modifications pertain to software updates. The main parameters of the instrument are defined in Table 1. The main objective of the wide FOV WAOSS-B instrument is the monitoring of vegetation and exploration applications; in in-track stereo capability is also being used for cloud investigations.

HORUS (High Optical Resolution Utility Sensor)
In an advanced project phase a panchromatic channel with a focal length of 500 mm was added to the WAOSS-B instrument, namely HORUS (the hybridized detector electronics of HORUS is of Rosetta program heritage). It is an optional sensor for verification tasks of the AOCS performance of BIRD (snapshot instrument). HORUS employs a CCD array of 1024 x 1024 pixels using a frame transfer technique. The telescope is of Cassegrain design.
References
1) I. Walter, K Brieß, et al., “BIRD - Microsatellite for Hot Spot Detection,” Proceedings of the 13th AIAA/USU Conference on Small Satellites, Aug. 23-26, 1999, Logan UT, SSC99-IX-4
2) K. Brieß, H. Hahn, H. P. Röser, “BIRD - A DLR Small Satellite Mission for the Investigation of Hot Spots, Vegetation and Clouds,” Proceedings of ISPRS International Symposium on Earth Observation System for Sustainable Development, Feb. 25-27, 1998, Bangalore, India, pp. 216-222
3) K. Brieß, W. Bärwald, T. Gerlach, H. Jahn, F. Laura, H. Studemund, “The DLR Small Satellite Mission BIRD,” Acta Astronautica, Vol. 46, No. 2-6, , 2000, pp. 111-120
4) O. Montenbruck, E. Gill, H. Kayal, “The BIRD Satellite Mission as a Milestone Towards GPS-based Autonomous Navigation,” ION GPS-2000, Sept. 19-22, 2000, Salt Lake City, UT, pp. 1968-1975
5) K. Brieß, W. Bärwald, E. Gill, W. Halle, H. Kayal, O. Montenbruck, S. Montenegro, W. Halle, W. Skrbek, H. Studemund, T. Terzibaschian, H. Venus, “Technology Demonstration by the BIRD Mission,” 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 7-11, 2003; - also published in Acta Astronautica, Vol. 56, Issues 1-2, Jan. 2005, pp. 57-63, doi:10.1016/j.actaastro.2004.09.041, URL: http://www.weblab.dlr.de/rbrt/pdf/IAA_B40304.pdf
6) B. Zhukov, K. Brieß, E. Lorenz, D. Oertel, W. Skrbek, “Detection and Analysis of High-Temperature Events in the BIRD Mission,” 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, April 7-11, 2003
7) http://www.dlr.de/os/Portaldata/48/Resources/dokumente/projekte/02-08-14_hot_spot_detection_results.pdf
8) http://www.dlr.de/os/desktopdefault.aspx/tabid-3510/5475_read-7936/
9) E. Gill, O. Montenbruck, S. Montenegro, “Flight Results from the BIRD Onboard Navigation System,” 5th ESA Conference on Guidance Navigation and Control Systems, Oct. 22-25, 2002, Frascati, Italy, ESA SP-516
10) E. Gill, O. Montenbruck, K. Briess, “Flight Experience of the BIRD Onboard Navigation System,” 16th International Symposium on Space Flight Dynamics, Dec. 3-7, 2001, NASA/JPL, Pasadena, CA, USA
11) E. Lorenz, W. Bärwald, K. Briess, H. Kayal, M. Schneller, H. Wüsten, “Résumés of the BIRD Mission,” Proceedings of the 4S symposium: Small Satellites, Systems and Services,” Sept. 20-24, 2004, La Rochelle, France
12) F. Lura, B. Biering, H. G. Lötzke, H. Studemund, V. Baturkin, “BIRD Microsatellite Thermal Control System - 5 Years of Operation in Space,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
13) K. Brieß, W. Bärwald, F. Lura, et al., “The BIRD Mission is completed for launch with PSLV-C3 in 2001,” Proceedings of the 3rd International Symposium of IAA, Berlin, April 2-6, 2001, pp. 323-326
14) N. Hanowski, T. Kuch, “BIRD - Mission Operations for an Integrated Microsatellite Project,” SpaceOps 2002, URL: http://www.aiaa.org/Spaceops2002Archive/papers/SpaceOps02-P-T3-25.pdf
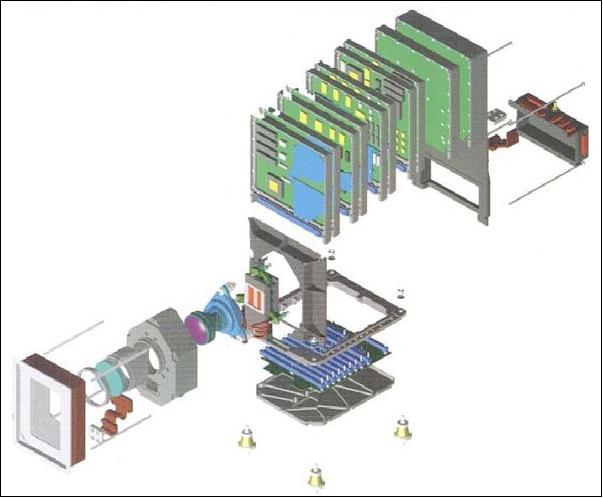
15) I. Walter, K. Briess, W. Baerwald, W. Skrbek, F. Schrandt , “The BIRD payload platform,” Proceedings of SPIE, 'Sensors, Systems, and Next-Generation Satellites VI,' Hiroyuki Fujisada, Joan B. Lurie, Michelle L. Aten, Konradin Weber, Editors, Vol. 4881, April 2003, pp. 460-471
16) Information provided by Robert Axmann of DLR/GSOC, Oberpfaffenhofen, Germany.
17)) Mission status information provided by Herbert Wüsten of DLR/GSOC, Oberpfaffenhofen
18) A. Eilers, “Analysis of the Power System from the Earth Observation Satellite BIRD,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
19) H.-P. Röser, “Cost Effective Earth Observation Missions - Fundamental Limits and Future Potentials,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005
20) E. Lorenz, H. Jahn, “BIRD: More Than 3 Years Experience in Orbit,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin Germany
21) J. Gonzalo, G. Martin de Mercado, E. Lorenz, D. Oertel, J. L. Casanova, M. Aquirre, W. Leibrandt, G. Billig, “Demonstration of a Semi-operational Fire Recognition Service Using BIRD Microsatellite - DEMOBIRD,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin Germany
22) W. Halle, K. Brieß, M. Schlicker, W. Skrbek, H. Venus, “Autonomous Onboard Classification Experiment for the Satellite BIRD,” Proceedings of ISPRS 2002, Buenos Aires, Argentina
23) W. Skrbek, E. Lorenz, “HSRS - An Infrared Sensor for Hot-Spot-Detection,” Proceedings of SPIE, Vol. 3437, 1998, San Diego, CA, pp. 167-176
24) R. Schuster, I. Walter, D. Hundertmark, F. Schrandt, “Design and Calibration of the BIRD Payload Platform,” Pecora 15/Land Satellite Information IV Conference, ISPRS Commission I Mid-term Symposium/FIEOS (Future Intelligent Earth Observing Satellites), Nov. 10-14, 2002, Denver, CO
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).