CADRE (CubeSat-investigating Atmospheric Density Response to Extreme driving)
EO
University of Michigan
Quick facts
Overview
| Mission type | EO |
| Agency | University of Michigan |
| Launch date | 06 Dec 2015 |
| End of life date | 03 Jan 2017 |
| CEOS EO Handbook | See CADRE (CubeSat-investigating Atmospheric Density Response to Extreme driving) summary |
CADRE (CubeSat-investigating Atmospheric Density Response to Extreme driving)
Overview Spacecraft Launch Mission Status Sensor Complement References
CADRE is a collaborative 3U CubeSat mission of the University of Michigan (UMich), Ann Arbor, MI, NASA/GSFC, and NRL (Naval Research Laboratory) of Washington DC. CADRE is a space weather mission sponsored by the National Science Foundation (NSF). The overall objective is the study of thermospheric properties. Earth's ionosphere and thermosphere are driven in a variety of regions on multiple scales, and changes in the upper atmosphere can adversely affect our society's increasingly critical space-based infrastructure. For example, satellite drag knowledge is crucial in predicting when possible collisions may occur between costly assets in LEO (Low Earth Orbit). Successful forecasting of these space weather events will not be feasible until there is an improved understanding of how this complex system reacts to energy inputs.
CADRE will be equipped with WINCS (Wind Ion Neutral Composition Suite), which contains four electrostatic analyzers (two for ions and two for neutrals) and two mass spectrometers (one for ions and one for neutrals). This combination of instruments will measure the in-situ density, temperature and composition of the thermosphere. In addition, WINCS will measure the neutral winds and ion flows. CADRE is a precursor mission for a constellation of Cubesats that will provide regional and global assessment of thermospheric feature scales. 1)
Background: The USAF (United States Air Force) monitors over 13,000 objects in LEO. In times of strong geomagnetic activity, many thousands of these orbiting objects can be temporarily "lost," in that the objects are not in their predicted location. These objects then must be re-acquired using radars, which is a time-consuming process.
When an object's location is unknown, there exists the possibility that it may collide with another orbiting object. There are many extremely valuable assets in LEO, such as the ISS (International Space Station) and several very expensive telescopes (Hubble, etc.). These assets can alter their orbits to avoid collisions by expending a portion of its fixed amount of fuel. While it is important to ensure that these assets do not collide with other orbiting objects, they should be moved only when absolutely necessary, in order to conserve fuel. A cost-benefit analysis may be performed, considering the cost of moving the satellite (fuel use), the cost of doing nothing (satellite destroyed), and the probability of an actual collision.
A major hindrance to the space weather operations community is that models accurate enough to reduce the error on the probability that the objects will collide do not yet exist. Therefore, the obvious result is that the satellites are moved more often than needed, using critical fuel and shortening the useful lifespan of the satellites.
The CADRE mission is being developed with this collision avoidance problem in mind. The goal is to enable more accurate specification and prediction of the state of the thermosphere as input for improved physics models for atmospheric modeling and drag predictions — to reduce the uncertainties in the collision probabilities..
The largest source of uncertainty in specifying and predicting the state of the thermosphere is our lack of understanding of the upper atmospheric response to energy input near the poles.
Science background: The thermosphere and ionosphere are two tightly coupled, overlapping regions of the atmosphere. Below the thermosphere, the atmosphere is relatively well mixed and is dominated by neutral dynamics such as tidal structures and gravity waves. Within the thermosphere, individual species start to separate from each other, the ionosphere forms, and the dynamics become dominated by the interaction with charged particles. The forces on the ionized plasma are significantly different than the neutral fluid below. For example, the magnetospheric electric fields cause the ions to move across magnetic field lines at high latitudes, while these fields do not directly influence the neutrals. The ions, which have a density roughly 1/1000th the neutral species, exert both a frictional drag and a frictional heating on the neutrals. Therefore, while the neutrals are not directly influenced by the magnetospheric electric fields, they are indirectly forced through the ion drag.
The high-latitude ion flows in the F-region ionosphere, which are mostly described by the magnetospheric electric field, are quite variable and are controlled by the IMF (Interplanetary Magnetic Field) and by the solar wind conditions. Many forces, such as ion drag, viscosity, Coriolis and gradient in pressure, on the other hand, influence the neutral winds. The balance between these forces is strongly dependent on location, the density of the ionosphere, the temperature difference between the nightside and dayside thermosphere and the strength of the ion flow. Further, because the neutrals have so much more mass than the ions, the neutral winds tend to be quite sluggish in their changes, while the ions flows tend to change quite rapidly. This can then influence the frictional heating that occurs because of the difference in flow velocities between the ions and neutrals. This heating is extremely important because it strongly controls the mass density of the thermosphere at a constant altitude, which, in turn, controls the drag on low-Earth orbiting satellites. Further, the neutral winds, at mid- and low latitudes, can push the ionosphere up and down magnetic field lines, which strongly controls the plasma density, affecting over-the-horizon communication systems and GPS accuracy.
There are a few ways of measuring the coupling between the ions and the neutrals. One of the most successful satellites to explore the coupling was DE-2 (Dynamics Explorer-2), which had many instruments on board that could measure both the ion and neutral states, such as the density, temperature and winds. DE-2 was a near-polar orbiting satellite that lasted from late 1981 through early 1983. Since then, there have been no satellites that could explore the coupling that occurs between the ions and neutrals in the high-latitude region in a similarly complete way.
The CADRE mission will attempt to rectify this situation by measuring both the neutral and ion state at the satellite location, similar to the DE-2 satellite. Specifically, CADRE will fly the WINCS (Wind Ion Neutral Composition Suite), which will measure the neutral and ion density, temperature, wind and composition.
Spacecraft
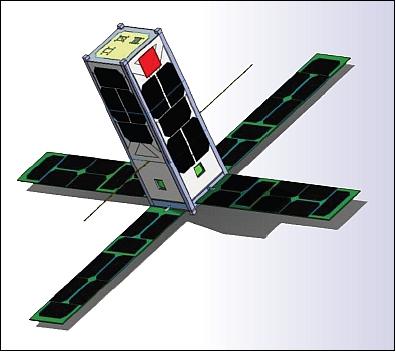
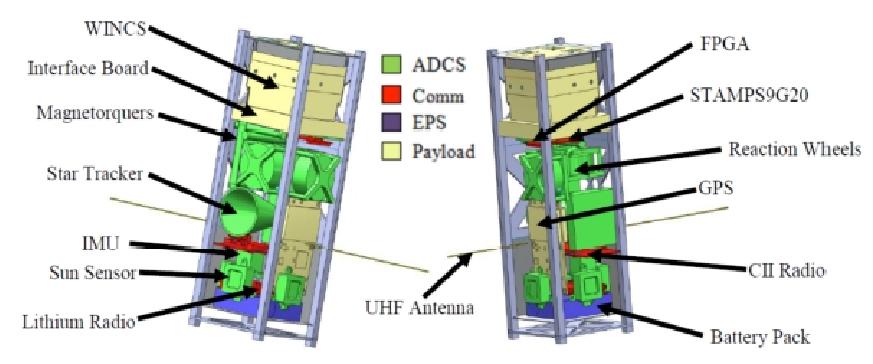
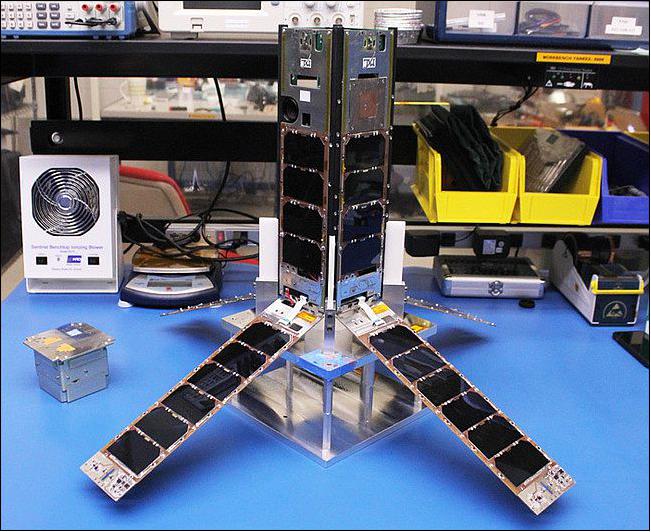
The CADRE mission uses the 3U CubeSat form factor with a size of 10 cm x 10 cm x 34 cm and a mass of 4 kg. The WINCS payload requires nearly a full 1U of volume. The attitude determination and control system requires 1-1.5U. The remaining bus systems will be configured to fill remaining volume.
ADCS (Attitude Determination and Control Subsystem): An active attitude determination and control system is required to meet the WINCS pointing and determination requirements of 1º and 0.5º, respectively. Attitude control will be accomplished with a standard configuration of three momentum wheels for control and three axis magnetic torque rods or coils for desaturation of wheels. The coil/rod selection will be performed later based on power, mass, and volume considerations of the final satellite configuration. 2)

The determination system will be a combination of low and high fidelity sensors combined with an onboard attitude estimator. Dual axis sun sensors and a triaxial magnetometer provide sufficient measurements for determination during sunlit portions of the orbit. However, low-drift gyros or additional sensors are needed for the eclipse. Attitude estimation will be calculated on board with an extended Kalman filter derived from RAX-1 heritage.
Attitude determination is accomplished by a series of photodiodes to calculate the solar vector, three IMUs (Inertial Measurement Units) to deliver body rates and a Star Tracker for fine-attitude determination. The CADRE satellite has three reaction wheels for attitude actuation along with a package of three magnetic torquers that are controlled based on inputs from three-axis magnetometers. The three Sinclair reaction wheels operate at up to 3,400 RPM and have a nominal torque setting of 1mNm requiring a maximum power of 0.7 W when at full torque. CADRE achieves a pointing accuracy of 1.0º with an attitude determination accuracy of 0.1°.
RF communications: 3) The satellite Command and Data Handling Board hosts a built-in radio system and an external card can hold a pair of SD Cards building the mass memory of the satellite. Data downlink is accomplished at the S-band frequency while status telemetry downlink and command uplink uses the amateur UHF frequencies.
Launch: The CADRE nanosatellite was launched as a secondary payload on December 6, 2015 (21:44:57 UTC) on the Cygnus Orbital ATK CRS-4 mission with the ULA Atlas-V-401 vehicle to the ISS (International Space Station). The launch site was SLC-41 (Space Launch Complex-41) at CCAFS (Cape Canaveral Air Force Station), FL. 4) 5) 6)
Note: The Atlas-V vehicle of ULA will provide a launch service for the Orbital ATK Cygnus CRS-4 cargo vehicle to the ISS as a replacement rocket for the Orbital Sciences Antares rocket which is grounded following its catastrophic Oct. 28 explosion on the Orb-3 mission from NASA Wallops. — The Orb-4 launch also marks ULA's first launch to the ISS. It may be followed by another Cygnus launch atop an Atlas V in 2016 as Orbital works to bring the Antares back into service. 7)
Secondary payloads:
- Flock-2e, 12 3U CubeSats of Planet Labs
- CADRE, a 3U CubeSat technology mission of the University of Michigan
- MinXSS-1, a 3U CubeSat solar physics mission of the CU (University of Colorado) at Boulder
- NODES (Network & Operation Demonstration Satellite), two 1.5 CubeSats of NASA
- STMSat-1 (Saint Thomas More School Satellite), Arlington, VA, 1U CubeSat.
- SIMPL (Satlet Initial-Mission Proofs and Lessons), a microsatellite of NanoRacks. SIMPL is a modular, hyper integrated satellite designed to provide complete satellite functionality in a nanosatellite scale. It will be the first NanoRacks microsatellite deployed from the space station and the first propulsion-capable satellite deployed from the NanoRacks MicroSat Deployer, known as Kaber. The commercial deployer system aims to address the growing market of customers wanting to deploy microsatellites from the ISS orbit.
Orbit: Near-circular orbit, altitude of ~400 km, inclination =51.6º.
Mission Status
• On May 16, 2016, the CADRE nanosatellite was deployed from the ISS using the NRCSD (NanoRacks CubeSat Deployer)to begin its journey into space. Astronauts on the space station stack the NRCSDs into an eight-dispenser configuration, which are then mounted on the JEM/Kibo (Japanese Experiment Module) airlock slide table and moved outside of the station. The Kibo arm captures the table and positions the entire facility toward Earth.
- ESA astronaut Tim Peake deployed the MinXSS-1 and CADRE nanosatellites from the Kibo module at 10:05 UTC. The STMSat-1,built by Elementary school students, was deployed along with NODES built by students at Santa Clara University at 14:40 UTC. 8) 9)

Sensor Complement (WINCS, GPS receiver)
WINCS (Wind Ion Neutral Composition Suite)
WINCS is the primary payload of the CADRE mission, developed by NASA/GSFC and the Naval Research Laboratory (NRL). The WINCS sensor suite is comprised of four instruments: 10)
• WTS (Wind and Temperature Spectrometer)
• IDS (Ion Drift and temperature Spectrometer)
• NMS (Neutral Mass Spectrometer)
• IMS (Ion Mass Spectrometer).
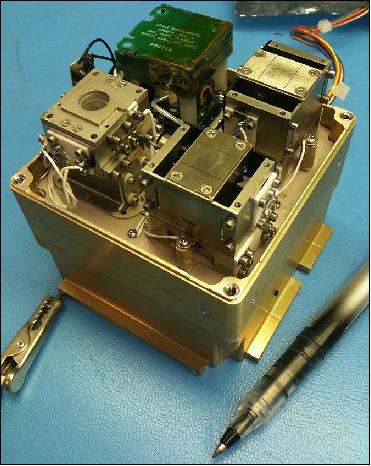
The WINGS suite has dimensions of 7.6 cm x 7.6 cm x 7.1 cm and a mass of ~ 0.850 kg (including interface electronics). The power consumption is 1.3 W.
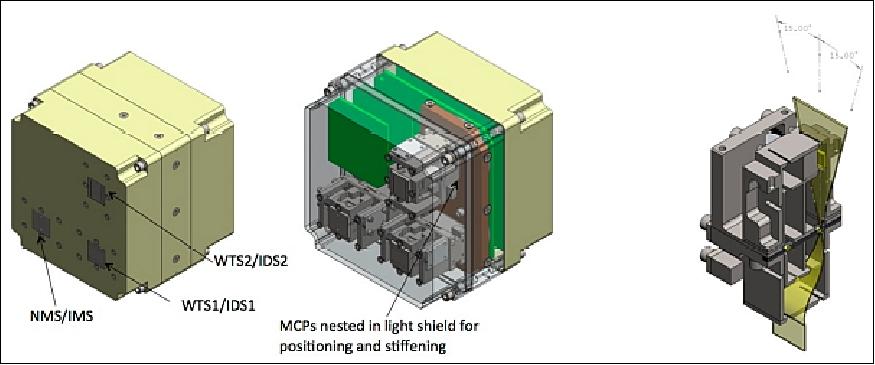
Legend to Figure 6: Left most is the layout of the 4 spectrometers on WINCS: (with an overall size of 7.6 cm x 7.6 cm x 7.1 cm). WTS and IDS are pal-red off in two spectrometer modules with mutually perpendicular FOVs (Fields of View) as shown by the two pairs of long slits on the right side of the figure. The two round apertures on the other module show the parallel ion and neutral paths through the instrument. The multi-chamber WTS/IDS pair provides 4 separate chambers that provide excellent photon rejection capability.
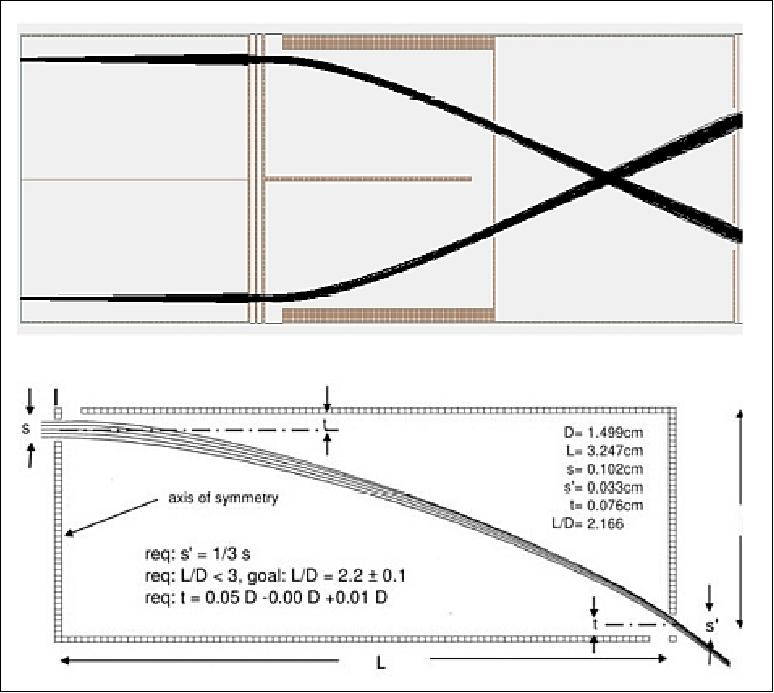
SDEA (Small-Deflection Energy Analyzer): At the hart of the WTS/IDS instruments is SDEA (Figure 7, top). Ions enter the SDEA horizontally from the upper (lower) left and deflect downward (upwards) as they continue to the right toward the exit slit in the lower (upper) right: The exit slit plane is a circular cylinder section with vertical axis passing through the entrance slit - this defines the angle imaging function of SDEA.
Figure 7 (bottom) considers only one of the two main deflection chambers. The upper and exit plates are biased at voltage VSDEA (typically < 10 V in flight) while the entrance and lower plates are at ground potential. The inhomogeneous field produced in the upper left region of the cavity produces the focusing shown in the incident ions, which makes the exit slit smaller than the entrance slit and is a desirable feature in reducing unwanted UV photons that may reach the MCP (Micro Channel Plate) detector placed beyond the exit slit (right wall in the left figure). Figure 6 (right) shows a complete, multi-channel SDEA for solar photon light ejection, with an example trajectory.
The SDEA instrument has two identical, but mirrored sensors. The top of the left chamber in Figure 6 (left) can be used to deflect the ambient ions and to ionize neutrals. This means that one half of the SDEA can be utilized for ions (e.g. bottom half) while the other half (e.g. top) can be utilized for neutrals.
Measuring winds and ion drifts: Neutral wind and ion drift measurements are obtained from the angular and energy distributions of the particle flux. Two separate analyzers measure the angular energy distributions in two perpendicular planes, their collinear axes pointing within a few degrees of the ram direction (e.g., WTS1 and WTS2 in Figure 6). Each analyzer spans 30º x 2º FOV in 15 angular pixels, each 2º x 2º pixel scanning the energy distribution in 20 steps with the energy analyzer voltage. Figure 6 (right) shows the 30º FOV of one of the instruments - particles entering from as far away as 15º from ram can enter the instrument (i.e., a cross-track speed of ~2 km/s). Because the slit half height is 1º, it is desirable to have the satellite pointed within 1º of ram, but the FOV is 15º, so the satellite can technically be pointed within 15º of ram to accomplish measurements.
The position of maximum flux in each analyzer specifies the horizontal and vertical angles in which the particles enter the detector. By sweeping in energy, the magnitude of the velocity can be determined. With the two angles and the magnitude, the total velocity vector is determined by: VT = VS +WS, where VS and WS are the satellite velocity and the wind velocity, respectively. The steps to obtain the wind are: 1) locate and evaluate the horizontal and vertical angles, 2) determine VT and 3) use the satellite attitude knowledge to obtain the pointing angle of the spectrometer and thereby solve W = VT - VS. Specifically, the two angles and V are obtained from the least squares fits of the TST measured energy angle v-distributions to the Maxwellian flux, while VS are obtained from GPS data.
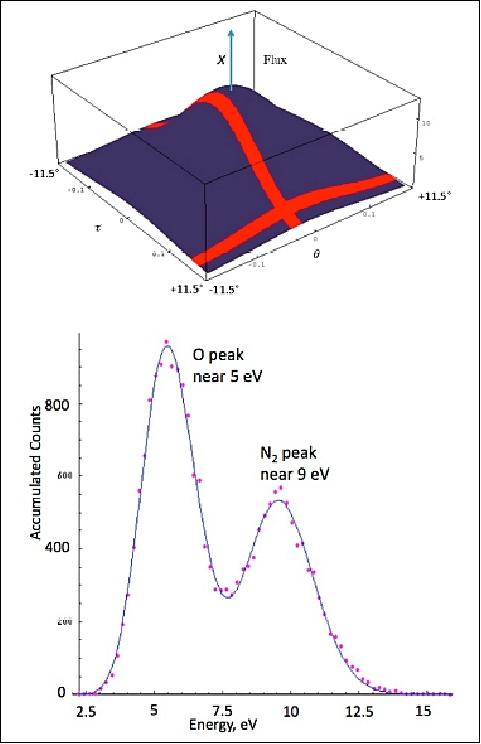
Figure 8 illustrates the two perpendicular planes (i.e., the red stripes) for the angular distributions of the flux (top) and the energy distribution from one of the pixels near the peak of either angular scan (bottom). These two figures are representative of the observations: two angular profiles and the single energy profile that would be telemetered to the ground as raw data to obtain the neutral wind vector, the neutral temperature and the O and N2 densities - equivalently so for the ions. The red strip parallel to the θ axis illustrates the problem with the satellite pointing too far away from the ram direction - the peak location, just given this strip, is quite difficult to accurately determine because the signal (i.e., height of the peak) is so small compared to the background. Closer to the ram direction (i.e., the other strip), the peak location is easy to accurately determine.
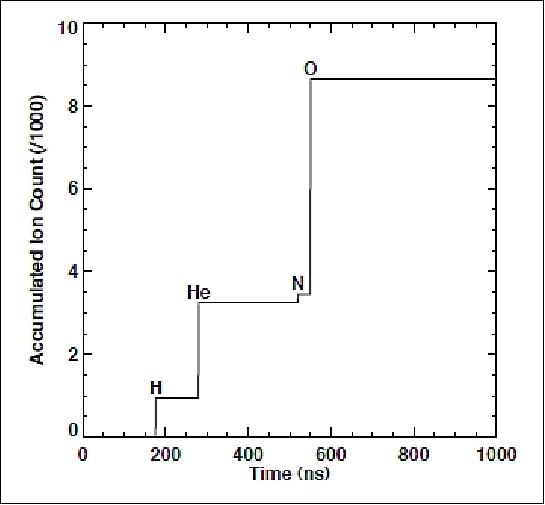
Neutral and ion composition measurements: The IMS/NMS (Ion Mass Spectrometer/Neutral Mass Spectrometer) uses two GEMS (Gated Electrostatic Mass Spectrometer) time-of-flight mass spectrometers developed at GSFC. GEMS utilizes an SDEA, as described above and illustrated in Figure 7, but it turns the potential on and off. When the potential is turned off, particles streaming into the detector at the entrance slit will continue in a straight line along the length of the SDEA, never reaching the exit slit. After the potential is turned on, the charged particles will be deflected.
For the particles that were just about to hit the back wall, the deflection will be minimal, but for the particles that were halfway across the chamber, the deflection will be greater, since they will have more time to accelerate. The acceleration is a function of mass. Therefore, a very short time after the potential is turned on, low mass particles will be deflected enough such that they start to come through the exit slit. Some time later, heavier particles will start to come through. This will result in a temporal distribution that looks like Figure 9, which enables mass resolution of the particles. A low-voltage mode of operation was developed and demonstrated recently to enable low-power operation in the CubeSat.
Since all species enter the mass spectrometers at essentially the same velocity (the orbital velocity of approximately 8 km/s), they must all be accelerated to sufficiently high kinetic energies to enable mass separation based on time-of-flight differences. Light species like atomic hydrogen enter with kinetic energy of approximately 0.3 eV, while heavy species with mass 56, such as iron (Fe), enter with kinetic energy of ~18 eV. So, the incident flux will have an energy spread ΔEinc of approximately 18 eV. In GEMS, the mass resolution Δm/m is equal to the energy resolution ΔE/E. Because of this, in order to achieve a mass resolution of 1/50, all species must be accelerated to a final energy Ef of 900 eV (i.e., 18 eV x 50). The same acceleration is required in both NMS and IMS - for NMS, following ionization by electron impact in its ion source. The accelerators in NMS and IMS are two-aperture ion optic lenses mounted an appropriate distance above the respective entrance apertures of the GEMS spectrometers.
GPS receiver
The secondary payload on CADRE is a dual frequency GPS receiver. The receiver will measure phase delays between two transmissions from the GPS constellation, L1 (1575.42 MHz) and L2 (1227.6 MHz). At transmission, L1 and L2 are in phase. The media through which the signals pass introduces phase delays between the two signals. Assessment of the delay will be used to measure TEC (Total Electron Content) of the ionosphere and density measurements of the troposphere.
1) James W. Cutler, Aaron Ridley, Andrew Nicholas, "CubeSat Investigating Atmospheric Density Response to Extreme Driving (CADRE)," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-IV-7, URL: http://rax.engin.umich.edu/wp-content/uploads/files/CADRE-SmallSat-2011.pdf
2) Dae Young Lee, James W. Cutler, "Design optimization of a Solar Panel Angle and its Application to CubeSat ‘CADRE'," 10th Annual Cubesat Developer's Workshop, 2013, Cal Poly, San Luis Obispo, April 24-26, 2013, URL: http://www.cubesat.org/images/stories/workshop_media/DevelopersWorkshop2013-Lee_Solar_Panel_Angle_Optimization.pdf
3) Damen Provost, "CADRE Communications Snapshot," 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: https://web.archive.org/web/20190716185147/http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2012/CHDC_Provost_CADRE.pdf
4) Ken Kremer, "Spectacular Blastoff of Atlas Cygnus Ignites Restart of American Cargo Missions to ISS," Universe Today, Dec. 6, 2015, URL: http://www.universetoday.com/123734/spectacular-blastoff-of-atlas-cygnus-ignites-restart-of-american-cargo-missions-to-iss/
5) "Oribital ATK CRS-4 Mision Overview," URL: http://www.nasa.gov/sites/default/files/atoms/files/orbital_atk_crs-4_mission_overview-2.pdf
6) "NASA Cargo Launches to Space Station Aboard Orbital ATK Resupply Mission," Dec. 6, 2015, URL: http://www.prnewswire.com/news-releases/nasa-cargo-launches-to-space-station-aboard-orbital-atk-resupply-mission-300188643.html
7) Ken Kremer, "Busy Year of 13 Launches by ULA in 2015 Begins with Blastoffs for the Navy and NASA," Universe Today, Jan. 20, 2015, URL: http://www.universetoday.com/118363/busy-year-of-13-launches-by-ula-in-2015-begins-with-blastoffs-for-the-navy-and-nasa/
8) "CubeSats with Amateur Radio payloads deploy from ISS," AMSAT-UK, May 16, 2016, URL: https://amsat-uk.org/2016/05/16/cubesats-deploy-from-iss/
9) Erin Mahoney, "First CubeSat Built by an Elementary School Deployed into Space," NASA, May 16, 2016, URL: http://www.nasa.gov/feature/first-cubesat-built-by-an-elementary-school-deployed-into-space
10) "The WINCS ‘Factory' First of Many Miniaturized Helio Instruments to be Delivered this Fall," NASA, July 16, 2011, URL: http://gsfctechnology.gsfc.nasa.gov/7-22WINCS.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top