CartoSat-2
EO
Imaging multi-spectral radiometers (vis/IR)
High resolution optical imagers
Land
The Indian Space Research Organisation (ISRO) launched CartoSat-2, a direct follow-on satellite to CartoSat-1 (Indian Remote Sensing Satellite-P5), from Satish Dhawan Space Center (SDSC), India in January 2007. Cartosat-2 was an advanced remote sensing satellite capable of providing scene-specific spot imagery. The data from the satellite was mainly used for detailed mapping and other cartographic applications at the cadastral level, urban/rural infrastructure development and management, as well as Land Information System (LIS) and Geographic Information System (GIS) applications. The satellite was decommissioned in 2019, ending 12 years of mission life.
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Operational (extended) |
| Launch date | 10 Jan 2007 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Landscape topography |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, Land surface topography, Glacier topography |
| Instruments | PAN (Cartosat-2E), HRMX, PAN (Cartosat-2) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), High resolution optical imagers |
| CEOS EO Handbook | See CartoSat-2 summary |

Summary
Mission Capabilities
CartoSat-2 carried a Panchromatic (PAN) camera that took monochromatic images of the Earth in the visible region of the electromagnetic spectrum. The instrument provided various modes of imaging such as continuous strip monoscopic mode, spot scene imaging, and paintbrush mode. The PAN camera was a Ritchey-Chretien on-axis obscured reflective telescope system that had a concave hyperboloidal primary mirror, convex hyperboloid secondary mirrors, and field correcting relay optics. This imagery was used for cartographic applications.
Performance Specifications
The PAN Camera was a nadir-pointing pushbroom Charge Coupled Device (CCD) instrument which had a detector line array of 12,288 pixels, observing in the visible spectral range of 0.5-0.85 µm with a Ground Sample Distance (GSD) of less than 1 m, and a swath width of 9.6 km at nadir. The PAN Camera optical system provided less than 1 m resolution across track, while the along track GSD of 0.8 m was achieved by reducing the apparent velocity by a factor of 2.5.
The satellite was in a sun-synchronous orbit, at an altitude of 635 km and an inclination of 97.87°. The LTDN (Local Time on Descending Node) was at 0930 hours, and the period was 97.4 minutes.
Space and Hardware Components
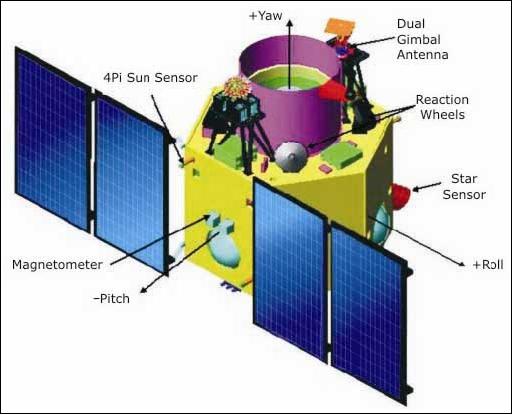
CartoSat-2 had a Bus Management Unit (BMU) for providing integrated main spacecraft bus functions, with a dual gimbal antenna for downloading the payload data, high torque reaction wheels, highly stable Inertial Measurement Unit (IRU) and advanced control algorithms.
The Attitude & Orbit Control Subsystem (AOCS) was capable of orienting the dual-gimballed data transmission antenna to point towards the required data reception station during the overpass of the CartoSat-2. The Inertial Attitude Control Mode (IRC) provided spacecraft control using a propagated inertial quaternion. The Data Handling System (DHS) consisted of the baseband Data Handling (DH) and Solid State Recorder (SSR). The DH received the 10-bit video-digital data from the Charge Coupled Device (CCD) video processor electronics of the payload through the 8 ports at the rate of 4.2 Msample/s. The source data rate of the payload was 336 Mbit/s.
CartoSat-2
Overview Spacecraft Launch Mission Status Sensor Complement References
CartoSat-2 is a direct follow-on satellite to CartoSat-1 (IRS-P5) of ISRO, Bangalore, India. The objective is to provide high-resolution imagery (< 1 m, with an event monitoring capability) from a highly agile spacecraft. 1) 2) 3) 4) 5) 6)
Note: The IRS (Indian Remote Sensing Satellite) series experienced a transition from the earlier generic purpose satellites (labeled as the P-series) to theme-oriented satellites like CartoSat, EduSat, OceanSat, Metsat etc. Hence, ISRO management decided not to affix the 'P' in the IRS series anymore, though they do constitute part of the IRS constellation of satellites.

Spacecraft
Several new technology elements have been introduced into the design of the CartoSat-2. spacecraft. These are:
• Hexagonal-shaped, light weight and compact spacecraft structure
• CFRP (Carbon Fabric Reinforced Plastic) based electro-optic payload structure with a two mirror on-axis single camera
• Introduction of BMU (Bus Management Unit) for integrated main spacecraft bus functions. The BMU integrates the TT&C, AOCS, and the thermal control functions, dual gimbal antenna (for downloading the payload data), the high torque reaction wheels, the highly stable IRU (Inertial Measurement Unit), and advanced control algorithms. BMU is realized using dual microprocessor configuration, each one acting as redundant processor for all the above functions.
• High bit-rate telemetry, telecommand and data-handling systems
• Solid state onboard data recorder of 64 Gbit capacity
• Dual-gimballed antenna 7)
• Advanced triple junction solar cells. Note: GSAT-2, INSAT-4A and CartoSat-2 are the first ISRO missions to have these multijunction solar cell arrays as the prime power generators. 8)
• Improved IRU (Inertial Reference Unit)
• High performance star sensor.
• Also use of the SPS (Satellite Positioning System), an 8-channel GPS receiver (C/A code) on-board for the provision of instantaneous state vectors (state vector using pseudo range and range rate measurements) for the spacecraft. The first SPS system was introduced on IRS-P5 / CartoSat-1. 9)
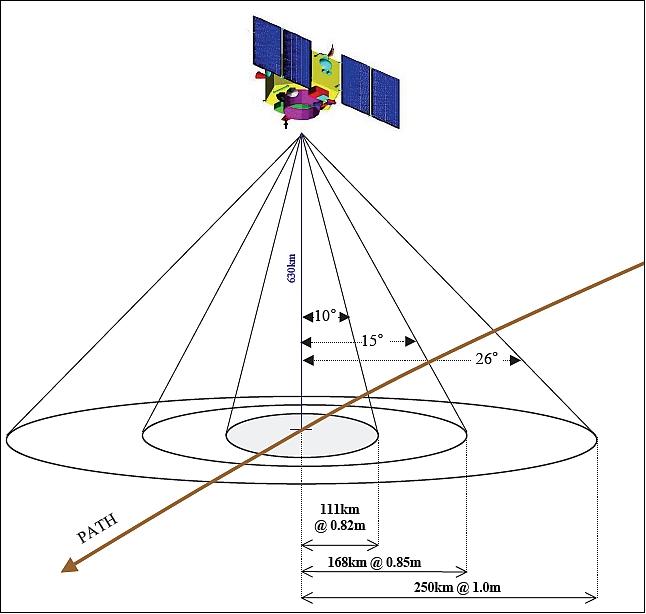
The spacecraft platform is a generic IRS bus. The spacecraft is 3-axis stabilized using high-torque reaction wheels, magnetic torquers and hydrazine thrusters as actuators. The spacecraft yaw axis is pointing into the nadir direction which is also the optical axis of the spacecraft. The pointing accuracies are ±0.05º in all axes, attitude knowledge = 0.01º, the stability (attitude drift) is 0.0003º/s, and the ground location accuracy is 100 m. The satellite is very agile providing a body-pointing capability in along-track and cross-track of up to ±45º (providing a revisit capability of certain target regions within 4 days).
The AOCS (Attitude and Orbit Control Subsystem) is also capable to orient the dual-gimballed data transmission antenna to point towards the required data reception station during the spacecraft overpass. Attitude sensing is provided by the star sensors (EADS Sodern SED26) and IRU with three 2-axis DTGs (Dry Tuned Gyros) as the prime sensors, along with sun sensors and magnetic sensors. - The actuators consist of a four reaction wheel system with momentum and reaction torque capability of 15 Nms and 0.3 Nm, respectively. There are eight 1N thrusters and 3 magnetic torquers.
The sun sensor, with a 4º FOV, is used for initial sun pointing and in the safe mode attitude holding operations of the spacecraft. The magnetometers are used for updating the magnetic torquers, which in turn dump the wheel momentum. The star sensor is used as the prime attitude sensor for roll, pitch, and yaw attitude measurements. It interfaces with other systems through the MIL-STD-1553 bus. The spacecraft is normally kept in sun-pointing mode and is brought to Earth pointing only during payload imaging periods. Upon imaging completion, the spacecraft is slewed back to the sun-pointing attitude.
The AOCS employs many innovative concepts like generalized reference quaternion generation, parallel computation of quaternion w.r.t various frames of reference like sun pointing frame, earth pointing frame, ECI (Earth Centered Inertial) frame for usage to switchover between various modes with ease at any instant; rate-to-rate maneuver algorithms to achieve prescribed attitude and attitude rate at precise prescribed times; usage of gyro stellar reference in various star sensor updating profiles; provisions for correcting various sensor and actuator misalignments; many safety features during imaging maneuvers; momentum dumping using three torquers; automated back and forth rotations for orbit maneuvers and various sensor calibration maneuvers; capability for autonomous reconfiguration of star sensors and reaction wheels; various types of safe modes; autonomous attitude acquisition modes etc. 10)
IAC (Inertial Attitude Control) mode: This mode provides spacecraft control using propagated inertial quaternion. IAC Mode is used in support of the following functions:
• To hold the spacecraft inertially to given reference quaternion
• To maintain the spacecraft using thrusters in the sun acquired geometry with negative pitch axis pointing towards the sun and with latitude dependent roll bias to meet thermal requirements for payload and for providing FOV clearance for the star sensor
• For rotating the spacecraft using thrusters, through the automated OM (Orbit Maneuver) sequencer, from the sun-pointing geometry to the required Earth-pointing attitude before the OM operation, and the reverse rotation to the instantaneous sun-pointing geometry after OM operation.
The DHS (Data Handling System) consists of the baseband data handling (DH) and SSR (Solid State Recorder). The DH receives the 10 bit video-digital data from the CCD video processor electronics of the payload through the 8 ports at the rate of 4.2 Msample/s. The source data rate of the payload being 336 Mbit/s.
Data compression: The data compression system compresses the video data with a compression ratio of 1:3.2 (JPEG algorithm). The compressed data are encrypted, RS (Reed Solomon) encoded and formatted, and appended with necessary auxiliary data from the 4 odd ports (I channel with 52.5 Mbit/s) and even ports (Q channel with 52.5 Mbit/s). The formatted data is transmitted to the ground through the QPSK modulator/transmitter at 105 Mbit/s. Additionally, the formatted data may also be recorded onto a 2-channel SSR with a storage capacity of 64 Gbit.
The fixed solar arrays provide a power of 900 W when pointed toward the sun; two NiCd batteries of 18 Ah capacity are being used for ecliptic phase bridging. CartoSat-2 has a launch mass of 680 kg and a design life of 5 years.
Spacecraft stabilization | 3-axis stabilized platform carrying a single linear array CCD based panchromatic camera |
Attitude pointing accuracy about all axis Attitude drift stability | 0.05º |
Spacecraft bus size | ~ 2.5 m x 2.4 m |
Thermal control | Active thermal control of the payload making use of precision thermistors and heaters. Overall spacecraft thermal control is achieved by making use of multi layer insulation blankets and optical solar reflectors. |
FOR (Field of Regard) | ±45º (providing a revisit capability of certain target regions within 4 days) |
Electrical power | ~ 900 W average (EOL), use of ATJ (Advanced Triple Junction) cells with 26.5% efficiency |
Propellant mass | 64 kg (orbit maintenance) |
Spacecraft launch mass | 680 kg |
Spacecraft design life | 5 years |
RF communications |
|

Launch
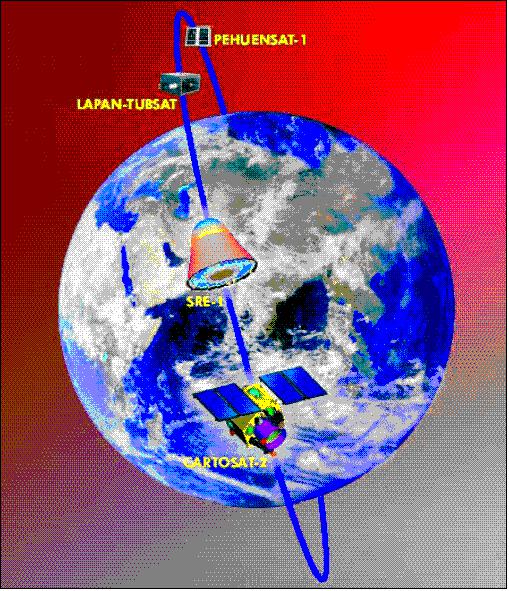
A launch of CartoSat-2 took place on January 10, 2007 on the PSLV-C7 launcher from SDSC (Satish Dhawan Space Center), Sriharikota Range, India (680 kg). - For the first time, a DLA (Dual Launch Adopter) was used in a PSLV vehicle to accommodate the payloads. CartoSat-2 was mounted on top of DLA. The three secondary payloads on this flight are:
• SRE (Space capsule Recovery Experiment) of ISRO (550 kg). The structure of the capsule is sphere-cone-flare configuration with a nose radius of 0.5 m, a base diameter of 2 m, and a height of 1.6 m. The objective of SRE-1 is to demonstrate microgravity experiments. SRE-1 carries two experiments, an Isothermal Heating Furnace [IHF] and a Biomimetic (Biomineralization of inorganic materials) experiment. The capsule, equipped with an aero-thermo structure as well as deceleration and floatation systems, will be de-orbited and recovered. The SRE-1 reentry test is meant for future manned missions. 11) 12) 13) 14)
• LAPAN-TUBSAT - a cooperative microsatellite project between TUB (Technical University of Berlin) and LAPAN (Lembaga Penerbangan dan Antariksa Nasional), or the Indonesian National Institute of Aeronautics and Space, Jakarta (56 kg)
• PehuenSat-1, an educational nanosatellite (6 kg) of Argentina, developed by the National University of Comahue (Universidad Nacional del Comahue), AATE (Argentine Association for Space Technology), and AMSAT Argentina. 15)
Orbit: Sun-synchronous near-circular orbit, altitude = 635 km, inclination = 97.87º, period of 97.4 min, nodal equatorial crossing time on descending node (LTDN) at 9:30 hours.
RF communications: The imagery is downlinked in X-band (8125 MHz) at a data rate of 105 Mbit/s. The TT&C data link is in S-band (2067 MHz). Both links operate in parallel.

Mission Status
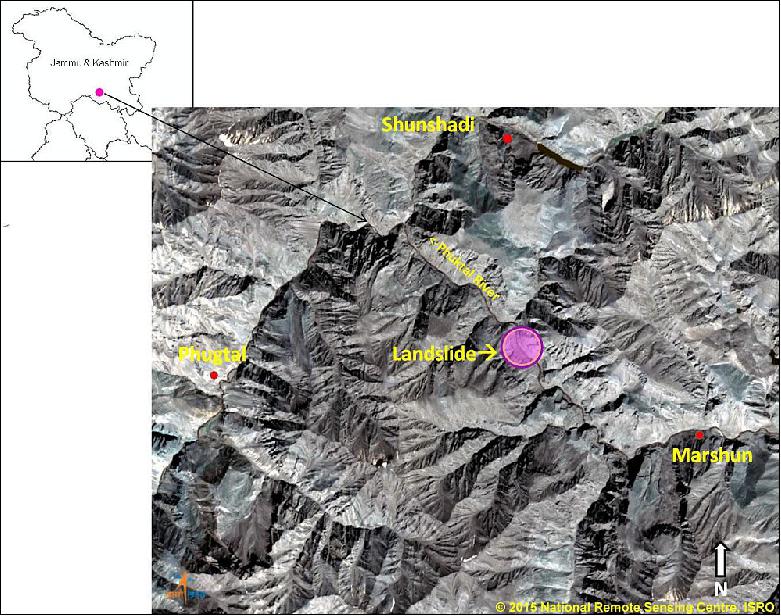
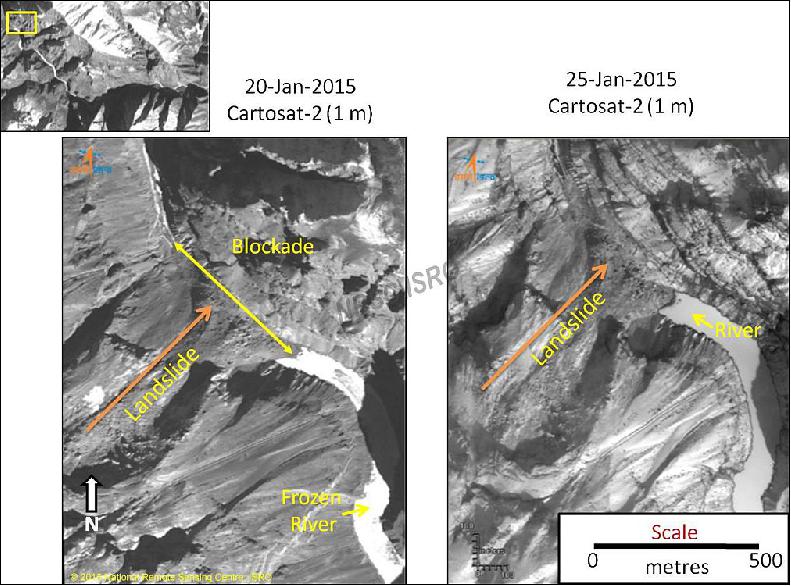
• Feb. 12, 2015: A landslide has occurred blocking the river Phuktal in the Zanskar Valley, Kargil District of Jammu & Kashmir. NRSC has been monitoring the Phuktal River Blockade since January 20, 2015. Recently, high resolution Cartosat-2 satellite data of 1 m spatial resolution has been acquired on February 07, to monitor the Blockade. 16)
• CartoSat-2 and its payload are operating nominally in 2014.
• CartoSat-2 and its payload are operating nominally in 2013. 17)
• CartoSat-2 and its payload are operating nominally in 2012 (in its 6th year on orbit). 18)
• CartoSat-2 and its payload are operating nominally in 2011.
• CartoSat-2 and its payload are operating nominally in 2010. 19)

• The commissioning phase of CartoSat-2 ended successfully at the end of July 2007 when the spacecraft was declared as operational.
• The first imagery was received at NRSA (National Remote Sensing Agency), Hyderabad, on Jan. 12. 2007.
• ISRO recovered the space capsule, SRE-1 (Space capsule Recovery Experiment), on Jan. 22, 2007, after a 12 day stay in orbit, from the Bay of Bengal, about 140 km east of the Sriharikota launch site. The de-orbit operations were conducted from the ISRO control center in Bangalore. All systems, including the heat shield, performed to satisfaction. 20)
• Soon after its separation from the DLA, the two solar arrays of CartoSat-2 were automatically deployed to generate the electrical power for the satellite. The satellite health is being continuously monitored from the Spacecraft Control Center of ISTRAC at Bangalore with the help of its network of stations at Bangalore, Lucknow, Mauritius, Bearslake in Russia, Biak in Indonesia, as well as support from Svalbard ground station of Norway for the initial phase of the CartoSat-2 mission.
Sensor Complement
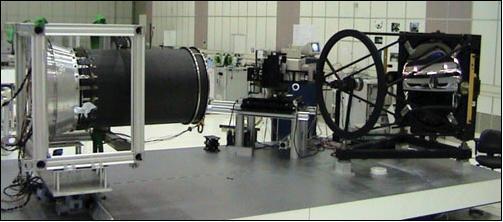
PAN Camera (Panchromatic Camera)
The objective is to provide imagery for cartographic applications. The optical system is designed with two mirror Ritchey-Chretien on-axis obscured reflective telescope system with a concave hyperboloidal primary mirror and convex hyperboloid secondary mirrors and the field correcting relay optics. The mirrors are made of special Zerodur glass and are light-weighted to about 60% as in CartoSat-1 series. The mirrors are mounted inside the telescope cylinder made of CFRP with special MFDs (Mirror Fixation Devices) and the whole telescope assembly is mounted to the spacecraft structure through a special suspension arrangement. The optical system is designed to provide < 1 m resolution across track. The along track GSD of 0.8 m is achieved by apparent velocity reduction by a factor of 2.5.
The spacecraft can be suitably biased to provide various modes of imaging:
1) Continuous strip monoscopic mode
2) Spot scene imaging (strips on either side of the ground track can be imaged)
3) Paint brush mode of imaging. This mode is used to increase the total swath. Both roll tilt and pitch tilt is employed.
The PAN Camera is a nadir-pointing pushbroom CCD instrument (detector line array of 12, 288 pixels), observing in the visible spectral range of 0.5-0.85 µm with a GSD (Ground Sample Distance) of < 1 m, and a swath width of 9.6 km at nadir.
Instrument type | Ritchey-Chretien on-axis obscured reflective telescope system |
Instrument mass | 120 kg (including electronics) |
Average power consumption | 60 W |
Instrument size | 760 mm diameter, 1600 mm in height |
Aperture diameter of primary mirror | 700 mm |
Focal length, F/number | 5600 mm, f/8 |
Spectral range | 0.45-0.85 µm (panchromatic) |
GSD (Ground Sample Distance) | 0.8 m at nadir |
Detector | 12,288 element CCD line array, pixel size of 7 µm x 7 µm |
Swath width | 9.6 km (FOV = ± 0.43º) |
Data quantization | 10 bit |
Onboard calibration | Relative using LEDs |
Source data rate | 336 Mbit/s |
Parameter, Mission | TES | CartoSat-2, -2A, -2B | CartoSat-2C, -2D, -2E | CartoSat-3, -3A, -3B | |||
Sensor name | PAN | PAN | PAN | MX | PAN | MX | HySI |
Spectral range (µm) | 0.5-0.85 | 0.5-0.85 | 0.45-0.90 | 0.45-0.86 | 0.45-0.90 | 0.45-0.86 | 0.4-2.5 |
Channels (bands) | 1 | 1 | 1 | 4 | 1 | 4 | >200 |
Resolution (m) | 1 | 0.8 | 0.65 | 2 | 0.25 | 1 | 12 |
Swath width (km) | 16 | 10 | 10 | 10 | 16 | 16 | 5 |
Data quantization (bit) | 7 | 10 | 11 | 11 | 11 | 11 | 11 |


ISRO Perspective of High-resolution Imaging
• With IRS-1C and IRS-1D (launch 1995 and 1997 respectively), stereo imaging was realized by obtaining the data of same area at different view angles in different orbits. While this provided ~5 m stereo images it had the stereo pair corresponding to different days. 23)
• With CartoSat-1 (launch May 5, 2005) the national requirements for high-resolution digital elevation information was met by using a dedicated same-orbit stereo imaging system, namely the two-line Pan camera, making use of an optics telescope with 0.5 m in aperture. 24)
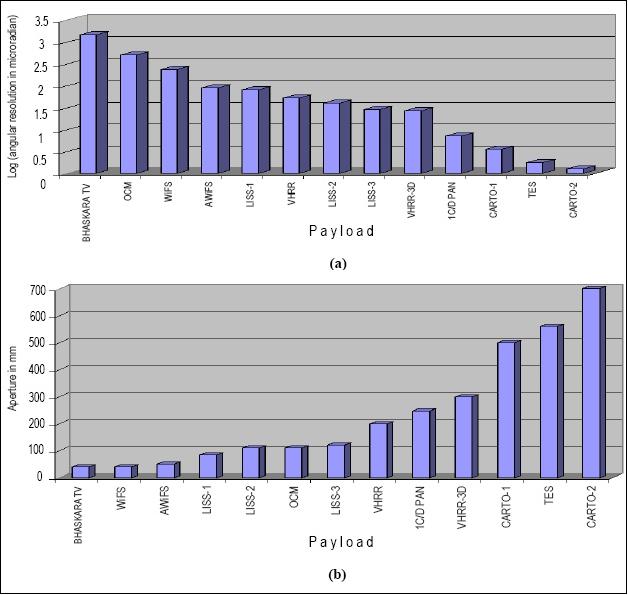
• The need for higher spatial resolution data for various applications were met by progressively improving the Earth observation system capability by continuously adopting newer technologies and using innovative techniques. The image resolution was improved from 72 m in 1988 to about 0.8 m in 2007 (Figure 17). The Pan camera of CartoSat-2 (launch Jan. 10. 2007) features a telescope of 0.7 m in aperture.
References
1) Information provided by V. Jayaraman of ISRO/HQ, Bangalore, India
2) M. Krishnaswamy, "Sensors and Platforms for High Resolution Imaging for Large Scale Mapping Applications - Indian Scenario," Indian Cartographer, 2002, DAPI-01
3) PSLV-7 /CartoSat-2 brochure of ISRO
4) V. Jayaraman, "India's Earth Observation Missions: Traversing through experiences of bilateral, regional and international cooperation," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.1.02
5) R. L. N. Murthy, C. V. S. Prakash, K. R. Sridhara Murthi, "Indian Remote Sensing Satellite Missions (IRS) - Reliable and Long-term Source of Spatial Data in Global Geospatial Markets," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.1.06
6) Marappa Krishnaswamy, "CartoSat-2 - A Dedicated Satellite for Cartographic Application," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B1.2.10
7) V. Senthil Kumar, V. V. Srinivasan, V. K. Lakshmeesha, S. Pal, "RF Design of Dual Gimbal Antenna," Journal of Spacecraft Technology, Vol. 19, No 1, January 2009, pp. 72-80
8) M. Sudhakar, M. Sankaran, M. Raja Reddy, A. Agarwal, N. Srinivasa Murthy, D. Srinivasa Murthy, Y. Bachu, "On-orbit experience of performance of high efficiency solar cells," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-C3.2.02
9) A. Kartik, S. C. Ratnakar, A. S. Ganeshan, "GPS Based Onboard Orbit Determination S/W (Goods) for IRS (Indian Remote Sensing) Satellites," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.3.05
10) A. Venkateswarlu, M. S. Siva, Jasvinder Singh K, G. V. P. Bharat Kumar, L. Ravi Kumar, H. K Joglekar, P. V. Jitesh, P. Natarajan,V. K. Agrawal, N. K. Malik, "Attitude and Orbit Control System For a High Resolution CartoSat-2 Spacecraft," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-C1.1.03
11) A. Subramoniam, Madanlal, N.C. Bhat, N.P. Giri, Koshy Mammen, A. Krishnan, P Sunil, "Space Capsule Recovery Experiment Project - Mission Overview," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-D2.2.04
12) J. K. Kishore, B. Partha,. S.Selvi, K. Parameswaran, V. K. Agrawal, "A Mission Management Unit for Satellite Recovery Experiment," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-D1.4.07
13) N. Narasaiah, R. Varaprasad, V. Seshagiri Rao, V. Krishnamurty, M. K.Sanyal, "Space Capsule Recovery – Evaluation Of Risk Factors, Safety Plans And Procedures And Design Of Experiments For Systems Qualification," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-D2.3.01
14) N. K. Philip, V. Chinnaponnu, E. Krishnakumar, P. Natarajan, V K Agrawal, N K Malik, "Attitude Control Schemes for the First Recovery Mission of India," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-C1.1.06
15) http://www.amsat.org.ar/pehuene.html
16) "Monitoring of Phuktal River Blockade (Zanskar Region), Kargil District,Jammu & Kashmir," ISRO/NRSC, Feb. 12, 2015, URL: http://www.nrsc.gov.in/ and: http://www.nrsc.gov.in/images/phutkal-5.jpg
17) Vinay K Dadhwal, "Indian Earth Observations & Space Science Missions : Status 2013," 56 th Session of UNCOPUOS, 12-21 June 2013, Vienna, Austria, URL: http://www.oosa.unvienna.org/pdf/pres/copuos2013/tech-14.pdf
18) Information provided by A. S. Kiran Kumar of ISRO/SAC, Ahmedabad, India
19) Paul Debashish, M. Pitchamani, S. K. Shivakumar, "Emergency Imaging Feasibility," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2032
20) "ISRO's 1st Recoverable Capsule Successfully Recovered," Space News, Jan. 29, 2007, p. 9
21) A. S. Kiran Kumar, V. K. Dadhwal, S. K. Shivakumar, "Indian Remote Sensing Satellite Series and Applications: A Saga of 25 years," NNRMS (National Natural Resources Management System) Bulletin, Bangalore, India,March 2013, p. 23, URL: http://www.isro.org/newsletters/contents/nnrms/NNRMS%20Bulletin%202013.pdf
22) Virender Kumar, "Indian Remote Sensing Satellites - Current and Future Missions," PECAD 2007 (Production Estimates and Crop Assessment Division), July 16, 2007, URL: http://www.pecad.fas.usda.gov/pdfs/2007/1%20Virender%20Kumar.pdf
23) A. S. Kiran Kumar, Tapan Misra, "Sensor Technology for Earth Observation: An ISRO Perspective," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.3.01
24) P. V. Radhadevi, V. Nagasubramanian, Mahapatra Archana , S. S.Solanki, Sumanth Krishna, Varadan Geeta, "Potential of High-resolution Indian Remote Sensing Satellite Imagery for Large Scale Mapping," ISPRS Hannover Workshop 2009, 'High-Resolution Earth Imaging for Geospatial Information,' June 2-5, 2009, Hannover, Germany, URL: http://www.isprs.org/proceedings/XXXVIII/1_4_7-W5/paper/Radhadevi-153.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top