COMPASS-2 (Complex Orbital Magneto-Plasma Autonomous Small Satellite-2)
EO
Mission complete
IZIRAM
Quick facts
Overview
| Mission type | EO |
| Agency | IZIRAM |
| Mission status | Mission complete |
| Launch date | 26 May 2006 |
| End of life date | 01 Jul 2007 |
| CEOS EO Handbook | See COMPASS-2 (Complex Orbital Magneto-Plasma Autonomous Small Satellite-2) summary |
COMPASS-2 (Complex Orbital Magneto-Plasma Autonomous Small Satellite-2)
Overview
COMPASS-2 (also referred to as Kompas-2 in Russia) is a Russian microsatellite mission, funded by Roskosmos, the Russian Academy of Sciences, and the Science Ministry; it is designed and developed at IZMIRAN (Institute of Terrestrial Magnetism, Ionosphere and Radio Wave Propagation of the Russian Academy of Sciences), Troitsk and by the Makeyev Federal Rocket Center (Miass, Ural Mountains); Makeyev also converted the Shtil military missile into a launch vehicle for the project. The overall objective of COMPASS-2 is to demonstrate possible topside sounding techniques that may eventually lead to the forecasting of natural disasters such as earthquakes. 1) 2) 3) 4) 5) 6) 7)
Specific objectives are:
• To develop coordinated monitoring methods (spaceborne and ground-based) to observe pre-earthquake phenomena
• To develop methods to monitor man-made catastrophes in general
• To study the dynamic coupling of the atmosphere, ionosphere and magnetosphere systems
• To acquire technical experience and know-how in the design and development of low-cost microsatellite building.
Background
A launch of COMPASS-1 took place already on Dec. 10, 2001 on a Zenit-2 launch vehicle from the Baikonur Cosmodrome, Kazakhstan. The prime payload on this flight was Meteor-3M-1. COMPASS-1 was a secondary payload along with Badr-B satellite of Pakistan, Maroc-TUBSAT of Morocco, and REFLECTOR (USA/Russia).
Note: The satellite COMPASS-1 experienced uncontrolled behavior ending in a loss of the mission shortly after deployment. The nominal orbit of COMPASS-1 was: Sun-synchronous circular polar orbit, mean altitude = 830 km, inclination = 98.85º, period = 102 minutes; local time of ascending node is 9:15 AM.
Spacecraft
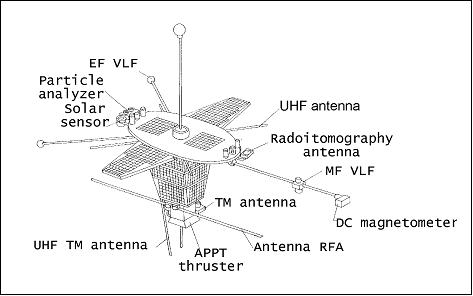
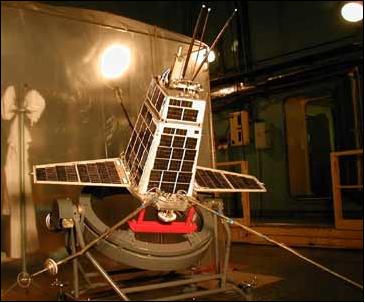
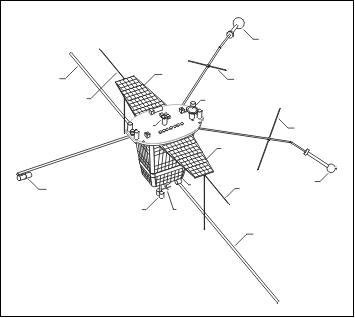
The COMPASS-2 spacecraft bus has the shape of an inverted (nadir looking) pyramid containing the instrumentation. Two deployable solar panel wings (total area of 1 m2) are zenith facing. The S/C is three-axis stabilized. Attitude is sensed by sun sensors and by a DC magnetometer. Actuation is provided by three magnetic torquers and by a gravity-gradient boom. A pointing knowledge of about 1º is provided. Real-time orbit determination and on-board timing services are provided by a GLONASS/GPS receiver system. The solar power provided is 50 W (EOL) at 27 V. The NiCd battery subsystem has a capacity of 4 Ah. The OBC (On-board Computer) provides all control and processing functions required. On-board data storage of 100 Mbit is available (flash memory). The S/C mass of COMPASS-2 is 85 kg (64 kg for COMPASS-1). The design life is five years.
RF Communications
A dual-frequency radio transmitter is used consisting of: a) a VHF (8 W, 137 MHz transmitter) amateur-standard data link is provided with a data rate of 64 kbit/s, and b) an L-band transmitter (10 W, 1700 MHz transmitter) with a data rate of 1 Mbit/s is provided. The functions of data acquisition and mission control are performed at IZMIRAN, Troitsk (Moscow region).
Launch
A launch of the newly built microsatellite COMPASS-2 took place on May 26, 2006 from the nuclear-powered submarine Yekaterinburg (also spelled “Ekaterinburg”) in the Barents Sea, using a Shtil-1N Volna (RSM-54) launch system.
Orbit
COMPASS-2 was launched into a slightly elliptical orbit with a perigee of 402 km, an apogee of 494 km, and an inclination 78.9º. The period is 93.5 minutes.
Mission Status
• The COMPASS-2 spacecraft ran into trouble immediately after its launch (communication loss due to a stabilization problem). The spacecraft did not respond to any ground commanding for about 1/2 year. However, communications with the satellite were restored on Nov. 16, 2006, and first data was received on Nov. 25, 2006.
• On Dec. 21, 2006, Roskosmos announced that testing of the onboard instruments and service systems was about to be completed. The stabilization and attitude control system onboard the satellite had been tested and scientific information had been received by the ground control.
• On Dec. 28, 2006, controllers successfully tested the Mayak (beacon) radio transmitter, working at 150/400 MHz. 10)
• The COMPASS-2 spacecraft experienced a miraculous recovery and started initial operations in Jan. 2007. The satellite was accepted as “operational” by early March 2007. 9)
• However, in early July 2007 the COMPASS-2 mission operations were simply terminated. The satellite got again into trouble in late March as well as in April; since that time all efforts were directed at attempts to restore its energy supply. No data from the payload devices was requested since that time. - So, because of serious mistakes in the platform design, COMPASS-2 managed to transmit a very limited amount of data. Still, being a pilot project, it demonstrated that all scientific devices worked well and can be used in future missions. 8)
• Initially, it was planned that IZMIRAN would be the only ground station involved in data acquisition, but more stations are needed after the spacecraft recovery to ensure COMPASS-2 functionality.
Sensor Complement
NVK (VLF Wave Analyzer)
The instrument is a cooperative development of IZMIRAN, Eötvös University, Budapest, and the Lvov Center of Space Research, Ukraine. The objectives are: 11)
• To measure the electric and magnetic vector components of the very low-frequency (VLF) radiation in the range of 1 Hz to 20 kHz
• Search for the links between seismic activity and low frequency emission as possible earthquake precursors that could be used for earthquake prediction
• Continuous monitoring of the low frequency (VLF/ELF) wave activity in the near Earth space environment
• Observation of the plasmasphere boundary variations and other geophysical phenomena using whistler properties.

A new field of interest is the analysis of lightning-associated ionization enhancement regions in the upper atmosphere. The effect of such regions, the so-called “Trimpi effect,” appears as a short perturbation - both in amplitude and phase - on signals of long-distance navigational VLF-transmitters.
The research of the lightning-triggered VLF signals, so-called “whistlers,” is a cheap, useful and natural tool of the investigation of the magnetosphere and the space surrounding the Earth.
RFA (High Frequency Wave Analyzer)
RFA is a cooperative experiment of CBR (Space Research Center) of the Polish Academy of Sciences, Warsaw, IRF-U (Institute of Space Physics) of Uppsala, Sweden, and IZMIRAN. The objective is the high-frequency spectrum analysis of the electromagnetic radiation in the range of 0.1 - 15.1 MHz.
The IRF contribution is the digital Rx module that performs the raw frequency sweeps, which are processed onboard by the RFA computer before they are passed to telemetry. The Rx module samples the antenna using a 14 bit ADC with a sampling rate of 40 Msamples/s. A 19-pole antialiasing filter with a cut-off frequency at 18 MHz is used. The frequency sweeps are performed by a digital mixer with a software controlled numerical oscillator. A raw sweep contains 1024 frequencies with 16-bit complex amplitudes. Sweep data is compressed in three steps by the RFA computer. First the number of frequencies is decreased so that the frequency stepping is smaller for low frequencies and larger for high frequencies. Then the absolute value is taken, making data real valued. In the last step the logarithm is taken and the resolution adjusted to 8 bits. 12) 13) 14)

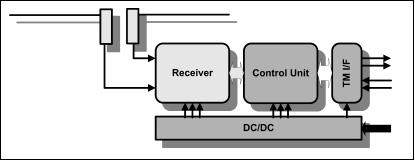

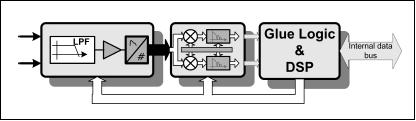
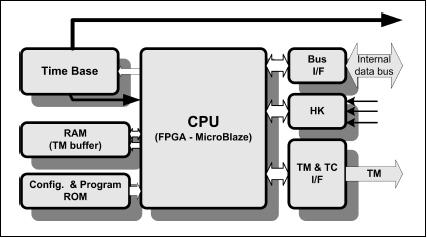
The measurement process is controlled by the CU (Control Unit), which is based on a virtual MicroBlaze 32-bit microprocessor programmed in a field programmable gate array (FPGA). From the raw complex frequency sweeps received from the Rx module, compressed dynamic power spectra are calculated.
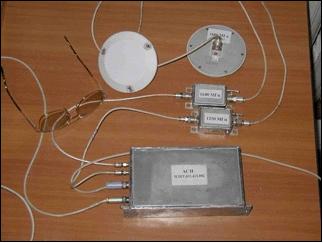
ASN (GLONASS/GPS Receiver System)/TEC (Total Electron Content) Detector
ASN is of IZMIRAN. The objective is to provide radio-tomography (i.e., measurement of the TEC distribution) and orbit determination (position to within 30 m, velocity to within 10 cm/s). GIT-12T has 12 channels to track 12 GPS or GLONASS satellites in parallel.
The TEC detector is designed for high-precision electron concentration distribution measurements (from the lower ionosphere to the satellite altitude) obtained by transionospheric sounding using global navigation system (GPS) spacecrafts. Experiment aims at:
• Study of the global distribution of vertical structure of the ionosphere
• Diagnostics of the active experiments in the ionospheric plasma, anthropogenic factors in the ionosphere and effects caused by natural phenomena in the atmosphere of the Earth, including seismo-active regions.
TEC includes a receiver coupled with the electronics block and antennas (L1 and L2). The basic characteristics of the antennas are:
- Polarization: right, circular
- Diagram in the upper hemisphere - circular with 3 db
- Gain at 7 to 90º - not less than 45 dB
- Frequency ranges: 1250 MHz and 1600 MHz
DRF (Radiation and Ultraviolet Detector)
DRF is also referred to as “Tatyana.” The instrument was designed and manufactured by the Nuclear Physics institute (NIIYaF) of the Moscow State University (MSU). The main objective is to register radiation, cosmic rays and ultraviolet emission coming from the Earth's atmosphere.

DM (Dual Frequency Radio Transmitter)
DM is also referred to as “Mayak” (beacon). The RBE-150/400 (”Mayak”) transmitter is designed for high-precision measurements of space-time distribution of the electron concentration structures above the sensitive regions as predicted by the orbital trans-ionospheric sounding.
References
1) V. S. Dokukin, V. N. Oraevsky, et al., “The General Conception of the Microsatellite Compass to be launched from Submarine to the Study of Earthquake Forerunners,” Proceedings of the 2nd IAA Symposium on Small Satellites for Earth Observation, Berlin, April 12-16, 1999, pp. 327-329
2) Information provided by Vladimir S. Dokukin of IZMIRAN, Troitsk, Russia
3) V. N. Oraevsky, V. S. Dokukin, V. A. Alekseev, Yu. Ra. Ruzhin, V. G. Degtiar, V. A. Danilkin, “The General Conception of the Microsatellite COMPASS to the Study of Earthquake Forerunners,” presented at the 11th Meeting of the US/Russian Earth Sciences Joint Working Group, April 23-26, 2001, Washington, D.C., USA
4) J. K. Ziemer, E. .A. Cubbin, E. Y. Choueiri, V. Oraevsky, V. Dokukin, “Pulsed Plasma Propulsion for a Small Satellite: Mission COMPASS P3OINT,” 32nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Lake Buena Vista, FL, July 1-3, 1996., AIAA-96-3292, https://web.archive.org/web/20100624053902/http://alfven.princeton.edu/papers/CPJPC96.pdf
5) V. A. Alekseev , V. A. Danilkin, G. A. Dmitriev, V. S. Dokukin, V. D. Kuznetsov, Yu. Ya. Ruzhin, “The General Conception of the Microsatellite COMPASS - To Study of the Earthquakes Forerunners,” Proceedings of the 31st International Symposium on Remote Sensing of Environment (ISRSE) at NIERSC (Nansen International Environmental and Remote Sensing Center), Saint Petersburg, Russia, June 20-24, 2005
6) Yu. Ya Ruzhin, V. D. Kuznetsov, V. .S. Dokukin, V.. A. Danilkin, “The capability of COMPASS-2 space mission to study the ionosphere disturbances related to seismic, meteo and human activity,” Proceedings of IWSEP 2007 (International Workshop on Seismo Electromagnetic Phenomena), Bandung, Indonesia, Nov. 6-7, 2007
7) S. A. Pulinets, “Space technologies for short-term earthquake warning,” Advances in Space Research,Vol. 37, Issue 4, 2006, pp. 643-652
8) Status information provided by Andrei Osin of IZMIRAN
9) Status information provided by Andrei Osin of IZMIRAN
10) http://www.russianspaceweb.com/compass.html
11) http://compass.izmiran.ru/
12) http://phisp.irfu.se/~jb/compass-2.html
13) H. Rothkaehl, J. E. S. Bergman, B. Thidé, Z. Klos, “The COMPASS-2 satellite and the ground-based LOIS vector sensing radar facility as novel tools for ionospheric plasma diagnostics,” URL: http://www.physics.irfu.se/~jb/Docs/compass-2_lois.pdf
14) http://www.physics.irfu.se/~jb/compass-2.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).