DMC-1G (Disaster Monitoring Constellation- First Generation)
EO
Atmosphere
Radiation budget
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | UKSA |
| Mission status | Mission complete |
| Launch date | 27 Sep 2003 |
| End of life date | 04 Oct 2011 |
| Measurement domain | Atmosphere, Land |
| Measurement category | Radiation budget, Multi-purpose imagery (land), Vegetation, Albedo and reflectance |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, Short-wave Earth surface bi-directional reflectance, Leaf Area Index (LAI), Vegetation Cover, Land cover |
| Instruments | SLIM-6 |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See DMC-1G (Disaster Monitoring Constellation- First Generation) summary |
Related Resources
DMC-1G (Disaster Monitoring Constellation- First Generation) Missions
The Disaster Monitoring Constellation (DMC) is an international program initially proposed in 1996 and led by SSTL (Surrey Satellite Technology Ltd), Surrey, UK, to construct a network of five affordable LEO microsatellites. The objective is to provide a daily global imaging capability at medium resolution (30-40 m), in 3-4 spectral bands, for rapid-response disaster monitoring and mitigation. 1)
Since a microsatellite constellation represents the most affordable and practicable solution to this problem, SSTL proposed in 1999 a five microsatellite constellation to its customers - with a stipulation/agreement by each potential “subscriber” or buyer of a satellite that they work as a constellation in the event of natural or man-made disasters. This innovative proposal provides opportunities, especially to developing countries, to not only own their own satellite, but also to have access to a disaster monitoring and mitigating satellite system. The key to all of this is Surrey's philosophy of low-cost, rapid access to space. 2) 3) 4)
The DMC consortium comprises a partnership between organizations in Algeria, China, Nigeria, Turkey and the United Kingdom. Along with SSTL, each organization has built an advanced yet low-cost Earth observation microsatellite to form the first ever constellation specifically designed and dedicated to monitoring natural and man-made disasters. The first DMC microsatellite, AlSAT-1 of Algeria, was launched Nov. 28, 2002. Satellites for Algeria, Turkey and Nigeria, built under a Know-How Transfer and Training (KHTT) program at Surrey (SSTL services from concept to orbit), were launched Sept. 27, 2003. The China DMC+4 satellite was launched on Oct. 27, 2005 (DMC+4 is now officially known as “Beijing-1”). The various partner organizations of SSTL for the DMC constellation are:
• CNTS (Centre National des Techniques Spatiales), Arzew, Algeria. The funding agency is ASAL (Agence Spatiale Algérienne) or Algerian Space Agency, Algiers, Algeria. The microsatellite is referred to as AlSAT-1 (Algeria Satellite-1).
• BNSC (British National Space Center) funded its own microsatellite in the constellation, designated as UK-DMC.
• The government of Nigeria funded the microsatellite NigeriaSat-1. The partner organization is the National Space Research & Development Agency (NASRDA).
• BILSAT is an Earth observation and technology demonstration mission of BILTEN TUBITAK-ODTU (Science Board of Scientific and Technical Research Council) of Ankara, Turkey.
• The Peoples Republic of China is represented by its Ministry of Science and Technology (MoST) and Beijing LandView Mapping Information Technology Company Ltd (BLMIT), with their satellite “Beijing-1.”
Aspiring partners:
• Vietnam is represented by the National Center for Science and Technology (NCST). The microsatellite is VnSat-1 (Vietnam Satellite-1).
• MUT (Mahanakorn University of Technology), Bangkok, Thailand. The microsatellite ThaiPaht-2 is being built at MUT in cooperation with SSTL.
Parameter | Description |
Constellation | |
Network | 4-7 spacecraft in a single orbital plane, 4-7 member ground stations |
Constellation orbit | Sun-synchronous circular orbit, altitude 686 km, inclination =98º, ascending node at 10:30 |
Constellation revisit time | Daily revisit (imaging capability) to any point on the equator + more often to higher latitudes |
Lifetime | 5 years target in orbit operational life |
Satellite Payload | |
Payload (SLIM6) | Two three-band linear array CCD cameras (double swath mount) |
Payload performance | Total swath width of >600 km, |
Sensor spectral bands | 0.52-0.62 µm (green), 0.63-0.69 µm (red), 0.76-0.9 µm (NIR) |
Data quantization | 8 bit |
Optics | Focal length = 150 mm, aperture diameter = 60 mm |
Onboard data storage | typically a minimum of 2 x 512 MByte SSDR (Solid-State Data Recorder), providing 1 Gbyte |
Satellite Platform | |
Platform type | MicroSat-100 bus (enhanced microsatellite bus) |
Platform size | About 60 cm x 60 cm x 60 cm, plus antennas |
S/C launch mass, power | approximately 90 kg, 4 GaAs body-mounted solar panels |
Battery | NiCd cells, 4 Ah capacity |
Orbit determination | GPS receiver, SGR (Space GPS Receiver) of SSTL |
Orbit control | Pressurized cold gas or liquified gas system for constellation phasing maneuvers, >12 m/s delta-v, 0.05 N thrusters |
Attitude determination | 2 x three axis fluxgate magnetometer; 4 x two-axis sun sensors |
Attitude control | 3 x orthogonal dual-wound magnetorquers; |
Onboard computer and data handling | 2 x OBC (providing redundancy). A redundant CAN (Controller Area Network) bus is being used for onboard communication functions (payload control and command functions) - in parallel with the fast serial links for image delivery. |
Propulsion | All DMCs employ an electric propulsion system (type: low-power resistojet) |
Communications | |
TT&C link, S-band | Uplink: omni-directional coverage from two patch antennas, CPFSK modulation, data rate of 9.6 kbit/s uplink. Downlink: monopole antennas, CPFSK modulation, data rate of 38.4 kbit/s |
Payload downlink | - Quadrifilar helix antenna, RF power of 4 W |
Ground Segment | |
S-band GSN (Ground Station Network) | 3.7 m dish antenna, TT&C and payload imagery downlink support |
Data requests | Consisting of a distributed set of cooperative mission planning systems that rely on communication via service providers and the public Internet |
Data distribution | Between GSNs (Ground Segment Networks) and service providers via Internet |
Data product | Rapid response, intelligible, north-oriented multispectral imagery |
Service providers | - The Reuters Foundation (to disaster relief agencies) |
Maximum System Image Capability | |
Capacity/day per member | > 80 image files of size: 80 km x 80 km (non-cooperative mode), varies with constellation coordination of resources |
The DMC constellation has an imaging capability of about 500 images per day. Imagery requests are planned to be coordinated through a centralized mission planning system at SSTL, UK. It is estimated that up to 5% of the imagery will be made freely available to disaster relief organizations. A rapid on-line news and communications service is proposed to make the imagery available to the relief agencies.
The strength of the DMC concept is that all satellites can work together with compatible ground stations to provide increased availability of information to users.
Spacecraft/Mission | Country/Organization | Launch Date | Imaging Resolution, Swath | S/C mass |
AlSAT-1 | Algeria/CNTS | Nov. 28, 2002 | 32 m MS, 600 km | 98 kg |
BILSAT-1 | Turkey/TUBITAK-ODTU | Sept. 27, 2003 | 28 m MS, 55 km (300 FOR) | 110 kg |
NigeriaSat-1 | Nigeria/NASRDA | Sept. 27, 2003 | 32 m MS, 600 km | 98 kg |
UK-DMCSat-1 | UK/BNSC | Sept. 27, 2003 | 32 m MS, 600 km | 110 kg |
Beijing-1 (China-DMC+4) | China/MoST | Oct. 27, 2005 | 32 m MS, 600 km | 166 kg |
Applications of the DMC are many and varied but of particular demand and suitability have been:
• Land cover and vegetation
• Hydrology
• Fire and burn scar mapping
• Flood monitoring
The aim of the DMC is to provide the ability to return imagery from any part of the globe with daily revisit (i.e. high temporal resolution). A system design goal is also to provide a high degree of responsiveness, both in tasking the constellation and image delivery. With a medium-resolution GSD (Ground Sampling Distance) of 32 m, it is possible to provide daily global coverage at the equator with 4 to 8 store and forward 8 Mbit/s S-band downlink imagining spacecraft, assuming each spacecraft is capable of accessing 300 to 600km of swath width. The wide-swath imager is referred to as SLIM6 ((Surrey Linear Imager Multispectral 6 channels) which is generally described under the AlSat-1 mission.
Background: The DMC concept arose from the recommendations of the United Nations UniSpace-III conference in July 1999 (Vienna, Austria), which recommended that space agencies should seek ways of coordinating activities in space to better monitor natural disasters, and provide information for disaster relief response planning. 6)
SSTL worked to build a coordinated constellation that could achieve the goal of daily repeat imaging anywhere in the world. To do this it had to convince a group of international clients to each purchase a DMC satellite and to agree to work together in a phased orbit. The credibility of the program was greatly enhanced by the support from the British National Space Centre (BNSC) which awarded a MOSAIC grant that enabled SSTL to build a UK satellite.
The extraordinary project to bring many nations together to create a working constellation in space has been a huge success. New satellites with enhanced capabilities are being added as the first ones reach the end of life, and new members are joining.
Constellation Phasing and Maintenance
Orbit of DMC constellation: Sun-synchronous circular orbit, altitude = 686 km, inclination = 98.2º, the orbital period is about 97.7 min, the LTAN (Local Time on Ascending Node) is 10:15.
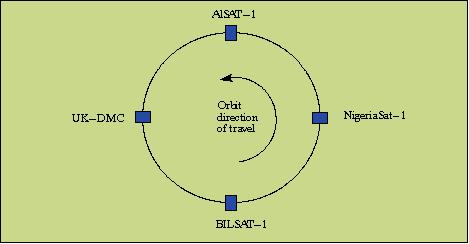
The launch of DMC-2 (Sept. 27, 2003 with BILSAT-1, NigeriaSat-1 and UK-DMC), along with the already orbiting AlSAT-1, permitted a constellation configuration of 4 equi-spaced satellites in one orbital plane. As of March 2004, AlSAT-1, BILSAT-1, NigeriaSat-1 and UK-DMC achieved their current target orbit with nominal phase slots of 0º, 90º, 180º, and 270º around the DMC orbit. The phasing maneuvers were coordinated by SSTL.
Orbit phasing has been achieved through a series of firings by each satellite's onboard electro-thermal propulsion system (resistojet), with accurate orbit position and velocity data provided by onboard GPS receivers. Both the onboard resistojet propulsion systems and GPS receivers were designed and built by SSTL. The satellites have sufficient onboard propellant to maintain their orbit stations for at least 5 years.
The key technologies required for each satellite to form and maintain the DMC constellation are:
• A propulsion subsystem, capable of providing a spacecraft delta v of up to 25 m/s
• A full ADCS (Attitude Determination and Control Subsystem) giving 0.3º of pointing knowledge and 0.5º of pointing control
• Knowledge of orbital position and the provision of timing functions (GPS receiver).
As of mid-2004, SSTL installed mission planning systems across the consortium of DMC satellite owners to move from the initial individual national satellite operations to the fully coordinated constellation tasking, imaging, data retrieval and processing.
With the coordinated constellation systems tested and commissioned, this enables the DMC consortium to image anywhere on the surface of the Earth with a 24-hour revisit period.
By fall 2004, the constellation had been fully established with the satellites in their correct orbital positions in their shared 686 km altitude, 10:15 hours local time at ascending node (LTAN) sun-synchronous orbit. All four spacecraft carry tri-band (NIR, red, green) imagers that match Landsat bands 2, 3 and 4. BILSAT has an additional blue channel, and uses area array CCDs, whereas AlSAT-1, NigeriaSat-1 and UK-DMC each carry a common 6 lens pushbroom linear CCD-array-based imager (SLIM6), capable of imaging a line of 20,000 pixels over a 660 km swath (double swath). Images may be acquired in flexible formats using basic 2500 x 2500 pixel “tiles” (approximately equivalent to 80 km x 80 km). Up to 24 such tiles (in each of the spectral bands) can be supported in a single image take every orbit. 7)
DMC calibration: Each DMC imager was radiometrically calibrated prior to launch at the Surrey Space Center using an integrating sphere (50.8 cm diameter), illuminated by a 150 W quartz-halogen lamp. The radiant flux was measured by a calibrated photometer.
Plans were also made for the regular re-calibration of the instruments in-orbit, recognizing that instruments do change their characteristics in the space environment. The method chosen was similar to that used for the AVHRR instrument on the NOAA POES satellite series that is to use a mixture of absolute calibrations using ground targets measured by ground instruments simultaneously with imaging during an overpass, and by imaging flat-field targets, such as the Antarctic ice sheets, for relative intercalibration.
The first absolute calibration was carried out in July 2004 in conjunction with the Remote Sensing Group (RSG) at the University of Arizona, using a test site in Railroad Valley, Nevada, USA. Atmospheric characterization data were collected at the same time as the surface reflectance measurements. This site has also been used for calibration of SPOT, Landsat, MODIS and other spacecraft. Relative intercalibration between the DMC spacecraft instruments is carried out by a regular campaign of imaging the East Antarctic ice sheet, or the Greenland ice sheets, depending upon the season. Dark images of deep space and the mid-Pacific ocean at night are also taken to establish black-level offsets. The advantage of this method is that the absolute calibration provides a tie point that allows to go back in time using the relative calibrations to update the calibration coefficients for each spacecraft.
DMC Propulsion Subsystems
AlSAT-1, as well as the other DMC spacecraft, feature an electric propulsion subsystem (delta-v of 10 m/s class resistojet, the propellant is butane, thrust of 50 mN) for minor orbit corrections. The propulsion subsystem has a dry mass of < 6 kg. The propellant mass is 2.35 kg.
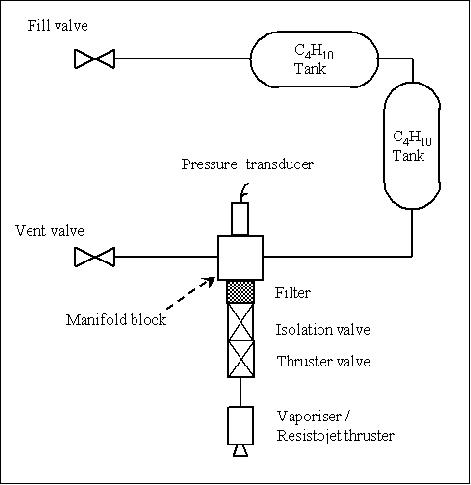
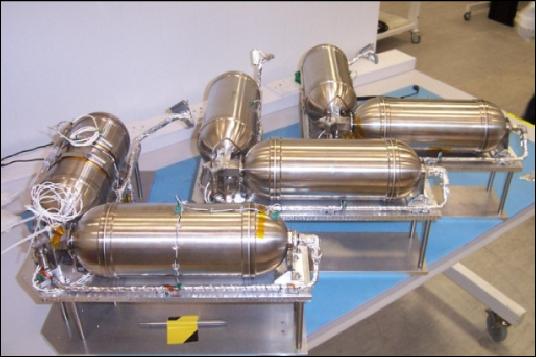
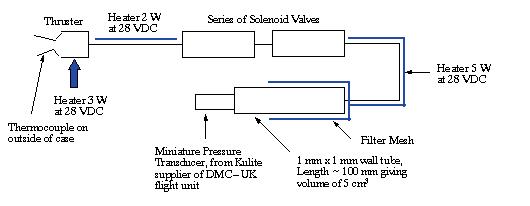
Each propulsion system stores butane in 2 propellant tanks (storage pressure of 200 bar in liquid phase). The outlet of one of these tanks is connected to a series of solenoid valves, which isolate the single resistojet thruster. The system is operated by opening the flow control valves and allowing the propellant to flow under its own vapor pressure, approximately 2 bar absolute. The thruster has a standard convergent/divergent nozzle with a throat diameter of 0.42 mm. The thruster is made of conventional materials, with all the machined parts being stainless steel. The heaters and propellant feed tube are brazed into the chamber and the case is welded closed. The thruster is fitted with a remote valve configuration. 8) 9) 10) 11) 12) 13)
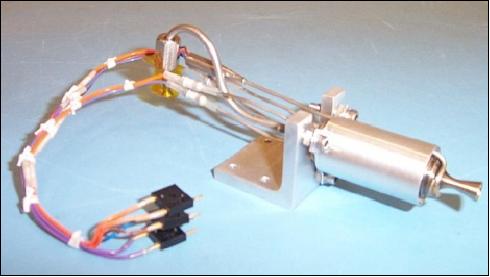
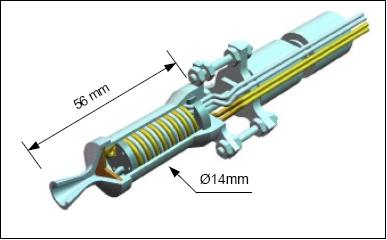
The thruster is mounted on the space-facing facet of the spacecraft (aligned with the S/C center of gravity), next to the separation system, with the thrust vector in the -x direction. With the thrust axis aligned along the velocity vector, the spacecraft's velocity may be increased by simply firing the thruster. On the other hand, a deceleration requires a yaw maneuver of 180º prior to firing.
Mission | Propellant type | Propellant mass | Comments |
AlSAT-1 | Butane | 2.35 kg | Low-power resistojet of SSTL |
BILSAT-1 | Butane | 2.35 kg | Low-power resistojet of SSTL |
NigeriaSat-1 | Butane | 2.35 kg | Low-power resistojet of SSTL |
UK-DMC | Butane | 2.35 kg | Low-power resistojet of SSTL |
UK-DMC | Water | 2.06 gram | Micropropulsion resistojet of SSTL |
Beijing-1 | Xenon | 10.8 kg | Low-power resistojet of SSTL |
AlSAT-1 (Algeria Satellite-1)
AlSAT-1 is a microsatellite of Algeria, the first of five microsatellites launched into the DMC (Disaster Monitoring Constellation) in a time period from 2002-2005. A team of 11 Algerian engineers from CNTS (Centre National des Techniques Spatiales) were trained at SSTL throughout the AlSAT-1 project period. The AlSAT-1 spacecraft is being funded by the Algerian government and has been built by SSTL as part of a know how transfer program. 14) 15) 16) 17) 18)
Spacecraft
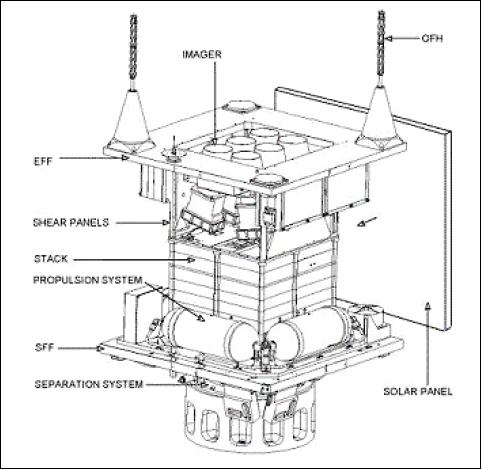
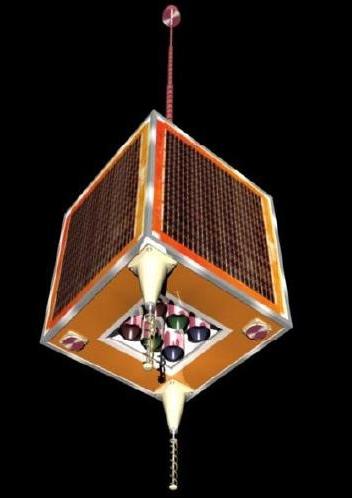
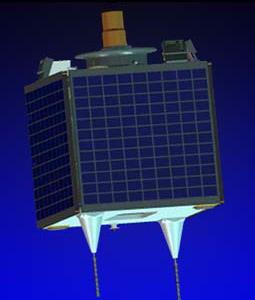
The AlSAT-1 spacecraft represents a new generation microsatellite with enhanced attitude and orbit control capabilities and a high data rate downlink. The S/C structure uses standard SSTL module trays of various sizes (aluminum-machined) to house the electronics and subsystems. The stacking of the modules provides stiffness to the structure. The enhanced microsatellite platform used for AlSAT-1 has dimensions of about 0.6 m x 0.6 m x 0.6 m in launch configuration. The S/C uses four body-mounted solar panels using GaAs/Ge cells providing a total power of about 240 W. The energy is stored in a 4 Ah NiCd rechargeable battery. AlSAT-1 has a total mass of approximately 98 kg.
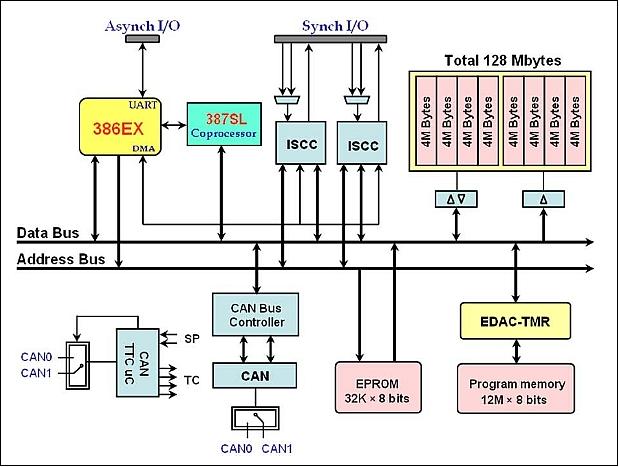
The satellite on-board computer (OBC) is an Intel 80C386EX based system that plays a dual role for AlSat-1, acting as the key component of the payload computer as well as the command and control computer for the microsatellite. It has also been adopted by several other satellite projects.
A liquified-gas propulsion system, augmented by a resistojet, is included to disperse the spacecraft into their respective slots, and enable them to maintain their orbit for the mission lifetime. Due to the constraints of small satellites, no maintenance of the orbit plane is catered for. Instead, the orbit is designed so that the drift in the LTAN (Local Time of the Ascending Node) remains within 1 hour for the mission lifetime. 19) 20)
Orbit: Sun-synchronous orbit, altitude of approx. 700 km, inclination = 98º, the equator crossing time is 10:00.
Launch: A launch of AlSAT-1 took place on Nov. 28, 2002 (Cosmos-3M launch vehicle from Plesetsk, Russia). The other payloads of the launch vehicle were: Mozhayets (a navigational and scientific satellite of Russia) and Rubin-3-DSI (OHB Bremen).
RF communication: A 9 Gbit solid-state data recorder is used to store image data. The data recorder is based around a PowerQuick II processor, and has the capability for significant onboard processing should this be required in future. The data recorder can record the entire instrument swath, or image sections in multiples of about 80 km. - Full S-band TT&C is included, alongside a high speed S-band downlink. This permits a compact tracking ground stations to be employed with a 3.7 m dish antenna within the network. The payload downlink uses shaped omni-directional quadrifilar helix antennas. The downlink rate is 8 Mbit/s, and the spacecraft fully employs IP-based protocols for its operation.
AlSAT-1 is the first spacecraft to use Internet Protocols (IP) for routine in-orbit operations (following some 12 months of successful IP demonstrations by SSTL on UoSAT-12 during 2000-2001). For payload data recovery, AlSAT-1 is the first spacecraft to implement the CCSDS (Consultative Committee for Space Data Systems) File Delivery Protocol (CFDP) which is also operating over the IP data link at 8Mbps. This combines the benefits of a file delivery protocol designed for space, with the use of low cost commercial off-the-shelf (COTS) products for the data link layer to provide a robust and flexible communications system.
Mission Status
• In the summer of 2010, AlSAT-1 completed its mission for ASAL (Algerian Space Agency) having exceeded its original 5-year design lifetime by 50% to a remarkable 7 years and 9 months. The mission reached its end of operational life due to onboard batteries which were no longer retaining their charges. 21)
- Throughout its lifetime, SSTL engineers have continued to work closely with the Algerian Operations team to prolong the life of the satellite, including developing new charge control strategies and turning the satellite around in orbit to effectively fly backwards. This enabled its battery pack to face into outer space to provide additional cooling as the battery aged.
- In 2009, SSTL Engineers worked with the Algerian Operations team to prepare the satellite for end of mission by using up the remaining propellant to both passivate the satellite and to lower the orbit by around 20 km to reduce its remaining time in orbit. After this work was complete, Alsat-1 continued providing imagery to the Algerian CNTS team (Centre National des Techniques Spatiales of Algeria) on a regular basis, although at a reduced capacity in order to further extend the battery life and this continued right up until end of mission.
Alsat-1 was Algeria's first national satellite - as well as being the first DMC (Disaster Monitoring Constellation) satellite, it was also the first SSTL spacecraft to carry SSTL's newly developed Slim 6 Line Scan Imager payload.
Sensor complement (SLIM6)
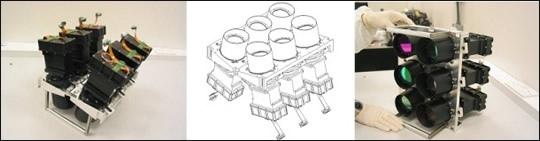
SLIM6 (Surrey Linear Imager Multispectral 6 channels - but 3 spectral bands) a standard imager, developed and built by SSTL. The SLIM6 design provides for a nadir-viewing, three-band multispectral scanning camera capable of providing mid-resolution image information of the Earth's surface.
The overall objective is to provide medium-resolution multispectral imagery for disaster monitoring services with large area coverage capabilities. Three spectral bands are provided in the ranges: 0.52-0.62 µm, 0.63-0.69 µm, and 0.76-0.9 µm (the SLIM6 bands come closely to those of Landsat-7 bands 2, 3, and 4). SLIM6 employs the pushbroom imaging technology using two cameras per band (mounted in a double-barrel cross-track configuration - or in two banks) thus providing a dual (slightly overlapping) swath with a combined swath width of 600 km at a spatial resolution 32 m GSD (Ground Sampling Distance).
SLIM6 consists effectively of 6 channels split into two banks and fixed on a V plate. Each channel is in fact an independent camera and contains a complete optics system plus a PCB (Printed Circuit Board) supporting the sensor and linked to the main PCB board in the stack (one main board per bank), thanks to a flexi-rigid PCB cable.
Each detector line array consists of 10,000 silicon element cells in cross-track. The detector output is digitized to 10 bits and processed to 8 bits radiometric resolution. The pushbroom system is capable of providing continuous imagery in flight path direction. The source data are stored in an onboard solid-state memory of 2 x 512 MByte capacity. SLIM6 features also a windowing capability. This function was introduced to avoid a saturation of the storage units and add more flexibility during satellite operations.

- Optics: The lens is a Schneider Apo-Componon HM 150 mm focal length (aperture f/4). It's a flight proven lens (flown onboard Tsinghua-1 satellite in 2000). This commercial lens has been subject to a set of test prior to use.
- Filters: High-quality dichroic filters in the optical assembly provided by BARR Associates Inc.
- Electronic modules: Two boards share the same PCB module (one for each bank of three channels). Each board is fully independent and drives the three channels (red, green, infrared). An FPGA circuit is used, the heart of the module, it receives imaging parameters and generates signals for the CCD sensor, LVDS, ADC, etc.
Each module of SLIM6 is in fact a separate imager.
Camera system | - Line scan camera system (pushbroom type) consisting of 6 channels split into two banks and fixed on a V plate |
Spectral bands (3) | 0.52-0.62 µm (green), 0.63-0.69 µm (read), and 0.76-0.9 µm (NIR) |
Spatial resolution | 32 m GSD |
Swath width (nominal) | 600 km |
FOV (per channel) | 26.62º; swath/channel = 324 km |
Optics system | The lens is a Schneider Apo-Componon HM, 150 mm focal length (aperture f/6.3). |
Detector | Eastman Kodak KL10203 - 10224 linear CCD detector (10 k pixels per line array); pixel size: 7 µm x 7 µm |
Data quantization | 10 bit |
BILSAT-1 (BILTEN Satellite-1)
BILSAT-1 is a cooperative microsatellite, an Earth observation and technology demonstration mission of TUBITAK-BILTEN, Turkey, and of SSTL, Surrey, UK. The overall project objectives are within an SSTL KHTT (Know How Training and Transfer) program to provide engineers from BILTEN with on-the-job training in almost all aspects of satellite building, to design and develop BILSAT-1 at SSTL, and to operate the satellite via a ground control center based at BILTEN facilities (Ankara/Turkey). BILSAT-1 will also be operating as one of the satellites in the DMC (Disaster Monitoring Constellation) cooperative program of SSTL. The BILSAT-1 cooperative project was initiated in 1999 as a stand-alone satellite initiative; however, when the DMC participation was raised and offered to BILTEN by SSTL, both parties agreed that BILSAT-1 did suit DMC quite well, and BILTEN decided to participate also in DMC. The overall objectives of the BILSAT-1 mission in DMC are:
• Medium-resolution Earth observation (including disaster monitoring) by demonstrating a new imaging system in concert with other DMC program participants
• Store and forward communications
• Demonstration of experimental payloads: COBAN GEZGIN, and CMG
• Exposure of Turkish engineers to all aspects of an operational satellite environment including science data analysis and interpretation.
Note: BILTEN is the acronym for “Information Technologies and Electronics Research Institute” - BILTEN is in turn a branch of TUBITAK (Scientific and Technical Council of Turkey) a non-profit governmental organization of Turkey, located on the campus of the Middle East Technical University (METU), Ankara, Turkey.
Spacecraft
BILSAT-1, the first Earth observation satellite of Turkey, follows the standard SSTL approach of a low-cost design and extensive use of COTS components. The core structure of the spacecraft comprises the standard SSTL self-supporting stack of equipment boxes. Each module box carries one or more subsystems, serving as both subsystem enclosure and structural element. The S/C bus is based on SSTL's 'enhanced' microsatellite platform, referred to as MicroSat-100 bus. The main bus improvements are a higher mass (around 120 kg instead of 60 kg), three-axis controlled platform (with agile maneuvering capability), medium resolution panchromatic and multispectral imagers, a more capable OBDH (On-Board Data Handling) subsystem and a high speed RF link operating at 2 Mbit/s.
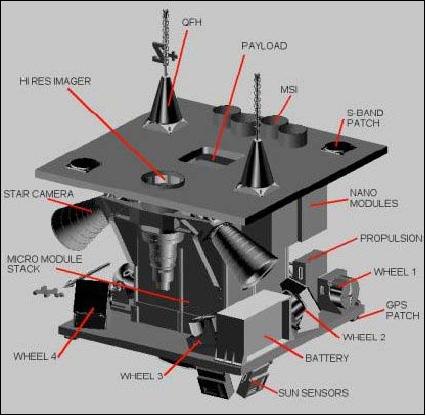
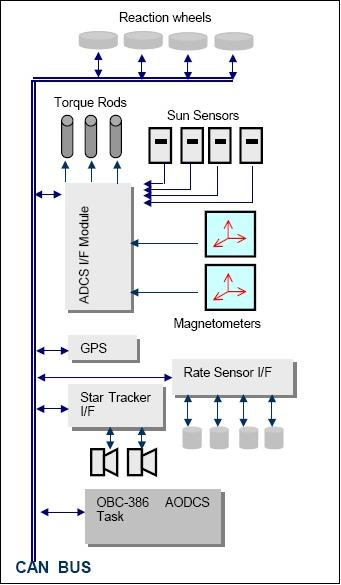
The S/C attitude is sensed by a suite of sensors consisting of two star cameras (model: Altair HB star tracker developed by SSTL), four sun sensors, four rate sensors and two magnetometers. Attitude control is provided by four reaction wheels, three torque rods, and a gravity gradient boom as actuators. The requirements call for an attitude accuracy of ±0.02º with an attitude knowledge of ±0.006º. The AODCS (Attitude and Orbit Determination and Control Subsystem) components are shown in Figure 18.
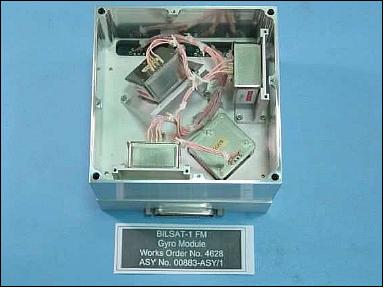
Introduction of MEMS technology: The RRS01 (Range Rate Sensor-01) MEMS device of AIS (Atlantic Inertial Systems, Plymouth, UK) was initially developed for terrestrial applications but has since been found to be suitable for space flight. This compact, light-weight unit has already been shown to be very robust in military applications and has a long lifetime owing to the design of resonating silicon ring at the heart of the sensor. Silicon-wafer mass production techniques are employed, bringing all the benefits of production repeatability as well as low cost and a short lead time. - SSTL integrated the RRS01 MEMS devices into the AODCS of BILSAT-1. Building on this experience, SSTL now has its MIRaS-01 (MEMS Inertial Rate Sensor-01) in production (2008), which incorporates the RRS01 rate sensor. 22)
The sensing element of the RRS01 is a 6mm diameter silicon ring supported on 8 radially compliant spokes. Four pairs of conductors are deposited on the surface of the ring which is situated in a magnetic circuit driven by a samarium cobalt magnet. In operation an alternating current, controlled to the natural frequency of the ring, is passed through a conductor pair (the primary drive circuit, Pd). The magnetomotive force produced causes the ring to resonate at its natural frequency which is perpendicular to the axis of the ring.
The motion of the ring is sensed by the electromotive force generated in the second conductor pair (primary pickoff, Pp). The drive frequency is maintained at the resonant frequency over the over the thermal environment by a phase lock loop (PLL) and a voltage controlled oscillator (VCO) and the amplitude of the ring motion is maintained an automatic gain control circuit (AGC).
The RRS01 can be configured for input angular rate ranges from 50º/s to 1500º/s. Bias performance is better than 1º/s over the full temperature range of -40ºC to +75ºC with scale factor linearity better than 1%. Rate output noise is less than 0.25º/s rms.
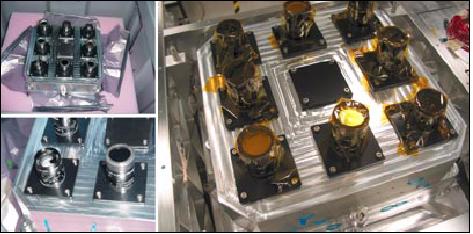
Four RRS01 MEMS rate sensors were packaged together with an SSTL standard CAN interface to give rate measurements about each axis with an additional sensor for redundancy. This experimental gyro module is shown in Figure 14.
This experiment was used to compare the attitude rates measured by the RRS01 rate sensors with those estimated from the other AODCS sensors on BLISAT-1. It was found that standard approaches to gyro bias estimation were ineffective owing to the bias dependency on temperature. It was, however, found that performance is greatly improved when a Kalman filter is used for bias estimation accounts for the temperature of the gyro module. The effectiveness of this bias calibration against temperature was still somewhat limited because only the temperature of the whole gyro module is measured rather than the temperature of the RRS01 rate sensor themselves.
Fortunately, each new RRS01 rate sensor incorporates an internal temperature sensor that allows the bias variation with temperature to be compensated for and so this channel is used in the MIRaS-01 that incorporates the RRS01 rate sensor. The BILSAT-1 flight experiment showed that the behavior of the RRS01 sensor was not affected by the space environment and provided SSTL with the necessary experience to produce a well-performing space IS (Inertial Sensor) module using this sensor (Ref. 22).
The S/C provides the following technologies: 23) 24)
• The S/C is using its SGR-20 (Space GPS Receiver-20) providing orbital position (within ±50 m) as well as attitude measurements. The SGR-20 employs a quad-antenna designed by SSTL to provide position, velocity, orbit and timing information. The four antennas are used to support attitude determination using GPS signals. The four antennas are integrated on the space-facing side of the satellite, providing an attitude of up to ± 1º.
• Experimental CMG (Control Moment Gyroscope) maneuvering system for agile pitch-axis control. The CMG cluster can potentially become a very efficient ACS (Attitude Control Subsystem) for agile small satellites, using less resources (mass, volume and electrical power) than conventional technologies (momentum/reaction wheels). SSTL is testing the CMG system as a future alternative to momentum/reaction wheels (referred to as MicroWheels, developed by SSTL) as such a technology is expected to offer a more efficient and faster maneuvering capability. For instance, the current CMG permits a 40º slew maneuver within 20 s (gimbal rate of 9º/s). The CMG technology development has been funded by ESA, TUBITAK-ODTU BILTEN, and the Surrey Space Center (SSC). 25) 26)
The CMGs designed for BILSAT-1 are based on COTS motors and employ a BDCM (Brushless DC Motor) to rotate the flywheel and a Stepper Motor (SM) that gimbals the flywheel assembly to provide gyroscopic torque. A low risk design approach was taken to develop a robust CMG to demonstrate the main features of a CMG: increased torque and angular momentum. The twin CMG payload can be also operated in momentum and reaction wheel modes as well as Variable Speed CMGs (Figure 19). The twin CMGs are placed in a parallel arrangement where the gimbal axes are perpendicular to the x-y plane and are parallel to each other.
ACS subsystem | Mass | Torque | Angular momentum | Power consumption |
Reaction wheel assembly | 1.1 kg | 10 mNm | 0.36 Nms | 5 W at 5,000 rpm |
CMG | 2.2 kg | 56 mNm | 0.28 Nms | 12 W at 16,900 rpm |
The three-axis control mode of CMG provides the satellite the ability to slew about any defined axis of nominally up to ±30º permitting observation capabilities within a wide FOR (Field of Regard), even wider slews are possible. The body-pointing feature and slewing capability enables also stereoscopic imaging as well as target tracking within the operational scenario of BILSAT-1. 27) 28) 29) 30) 31)
The reaction wheels are expected to operate for a minimum of five years. After this period the gravity-gradient boom can be deployed to extend the mission life of the spacecraft beyond the design life. During this period the S/C will perform a nadir pointing mission (no longer 3-axis controlled) with a pointing accuracy of ±0.3º. S/C power is provided by body-mounted solar panels with single-junction GaAs cells. Each panel provides 58 W at BOL. Each panel feeds a BCR (Battery Charge Regulator) operating at maximum power tracking. A single NiCd battery pack of 22 cells (with 4 Ah capacity) provides an unregulated 28 V power bus to all subsystems. In addition, a regulated bus of 5 V is provided by dual-redundant PCMs (Power Conditioning Modules). The PCM/PDM (Power Distribution Module) is being controlled by two redundant CAN (Controlled Area Network) nodes which are capable of providing all functionality for the module. The OBDH consists of OBCs (Intel 80186, +2 Intel 80386 microprocessors), SSDRs (Solid State Data Recorders) and the data network. Two SSDRs are available, one StrongARM processor with 128 MByte of memory, the other is a Power PC with 512 MByte of memory. Both units have the capability to provide data compression. 32)

The BILSAT-1 experimental CMGs are the first commercial CMGs flown in space and have shown that this class of actuators can give unique and unparalleled agility capabilities even to small and low cost satellites
Component | Manufacturer | Performance | Constraints |
Star camera (model: Altair HB) | SSTL | - FOV: 15.74º x 19.53º | - Mass: 1.7 kg (including baffle) |
Sun sensor | SSTL | - FOV: 60º x 60º | - Mass: 300 g |
Range rate sensors (solid state gyros) | BAE, SiRRS | - Range rate: ± 50º/s | - Mass: < 35 g |
Reaction wheels | SSTL | - Angular momentum: 0.42 Nms | - Mass: 1.1 kg |
• Altair HB star tracker. This is the next-generation star tracker, developed at SSTL (some heritage of star trackers flown on PoSat-1 and UoSat-12). The COTS Altair HB star tracker consists of two electronics modules and a camera head with baffle. The processor module is primarily responsible for calculating the star tracker derived attitude and rates using images of star fields as an input, while the control module generates the signals needed to drive the camera head and format the data for the processor module. Together, the modules coordinate all the data exchanged between the star tracker and the external spacecraft components, including the on-board control computers and the global positioning system (GPS) receiver. 33)
Electrical specifications |
| Comments |
Power supply | Unregulated bus 28 V |
|
Power consumption | 6 W |
|
Duel redundant CAN interface |
|
|
GPS Timing Interface |
| Provides precise timing |
Strong-ARM SA1100 processor | 162 MHz |
|
EDAC protected SRAM, Flash memory | 4 Mbit, 6 Mbit |
|
Image SRAM | 1 Mbit |
|
Physical characteristics |
|
|
Processor module and control module | 190 mm x 135 mm x 44 mm, 850 gram |
|
Camera head (incl. COTS CCD and lens) | 74 mm x 95 mm x 105 mm, 530 gram | F/0.95, 25 mm lens |
Baffle | 150 mm x 150 mm x 185 mm, 300 gram |
|
Performance |
|
|
Exclusion angles | 40º sun; 30º Earth and moon |
|
FOV (Field of View) | 15.74º H; 10.53º V |
|
Pointing accuracy, w.r.t. boresight (1σ) | 5 arcsec normal; 28 arcsec around | Matching 10 stars |
Max tracking rate | 0.5º/s | To maintain sensitivity |
Sensitivity | ≤ MV 6 stars | Average of 20 stars in the field of view |
Number of stars tracked | 50 max | P(≥ 10 stars in FOV) = 97% |
Star matching process | 98.8% success |
|
Lost in space initialization | 98.8% success | Within 5 seconds |
Operating temperature, bandwidth | -10º to 50º C, 1 Hz |
|

The internal electronics, mechanics and baffle were designed and built by SSTL, while the actual sensor is a commercial CCD device manufactured by Kodak. Next to BILSAT (2 units for redundant configuration), the Altair HB star tracker is being flown on Beijing-1.
RF communications: BILSAT-1 employs a hybrid RF communication system featuring an S-band system and a heritage UHF/VHF backup system. The S-band system is being used as the prime for imagery communications as well as for TT&C services. It consists of two 9.6 kbit/s CP-FSK receivers and of two 2Mbit/s BPSK transmitters. The VHF receivers employ CP-FSK modulation, with an upload data rate of 9.6 kbit/s. There are two units operating in a hot redundant mode. Four blade antennas provide omnidirectional coverage. The UHF transmitter has two amplifier chains, to provide download rates of 9.6 kbit/s, 38.4 kbit/s or 76.8 kbit/s using a set of four blade antennas that provide omnidirectional coverage.
A BILSAT-1 mission control ground station has been installed at BILTEN's premises in Ankara with a high-speed S-band link and a backup UHF/VHF link (standard SSTL unit). The S-band ground station is similar to the ground stations of the DMC (Disaster Monitoring Constellation), with a 3.7 dish antenna, with a BPSK/QPSK modem for the downlink and a transceiver and modem for generating the CP-FSK uplink.
BILSAT accommodates also a store-and-forward type communications payload. This payload is being used by various organizations in Turkey to create public awareness of satellite technologies.
BILSAT-1 has a mass of about 110 kg and a design life of at least 5 years in three-axis control mode (design life extension in gravity-gradient mode up to 10 years is a mission goal).
Launch: A launch of BILSAT-1, along with NigeriaSat-1 and UK-DMC took place Sept. 27, 2003 on a Kosmos-3M vehicle from Plesetsk, Russia.
Orbit: Sun-synchronous circular orbit, altitude = 686 km, inclination = 98.8º, the orbital period is about 97.7 min, the equatorial nodal crossing time is at 10:30 LTAN (Local Time on Ascending Node). 34)
Mission Status
The BILSAT-1 operations were terminated in August 2006 after nearly 3 years of service provision. The major reason was a failure of the battery system which prevented energy storage onboard the spacecraft. 35)
Sensor Complement (PanCam, MSIS, COBAN)
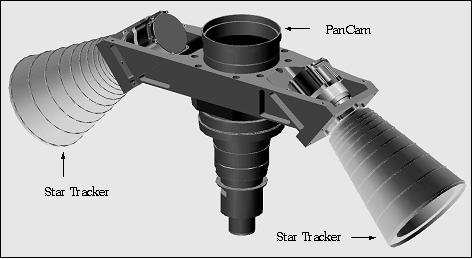
PanCam (Panchromatic Camera), of UoSat-12 heritage. The objective is the provision of medium-resolution imagery at 12 m GSD. The telescope has an aperture diameter of 400 mm. The lens is a COTS element. Kodak KAI-4000 array detectors are used (2048 x 2048 pixels, staring array), they include an image memory which can be used to store images prior to transfer to the mass memory. A swath width of 25 km is provided within a FOR (Field of Regard) of 300 km. The panchromatic imager is mounted onto the same assembly as the star cameras (optical platform) to provide optimal alignment and in particular pointing accuracy.
MSIS (Multispectral Imaging System). MSIS is the primary imager of BILSAT-1 composed of four individual cameras, each one operating in a different spectral band (red, blue, green, and near infrared) with a GSD of 26 m and a swath width of 55 km. The MSIS imager is a staring array which takes snapshots of 55 km x 55 km size that can be targeted within an 300 km accessible swath through body pointing of the spacecraft [the FOR (Field of Regard) is 300 km max in any direction]. This accessible swath width of MSIS corresponds to half the standard DMC observation swath capability. The CCD detector array is of size 2048 x 2048 pixels, data quantization is at 8 bit. The system permits to take a sequence of overlapping imagery resembling a swath.
Band | Spectral range | Band | Spectral range |
NIR | 774 - 900 nm | Green | 523 - 605 nm |
Red | 629 - 690 nm | Blue | 448 - 516 nm |
Additional experimental R&D payloads of Turkey: An additional space (with a mass and power budget) was reserved for Turkish institutions to provide an environment for experimentation.
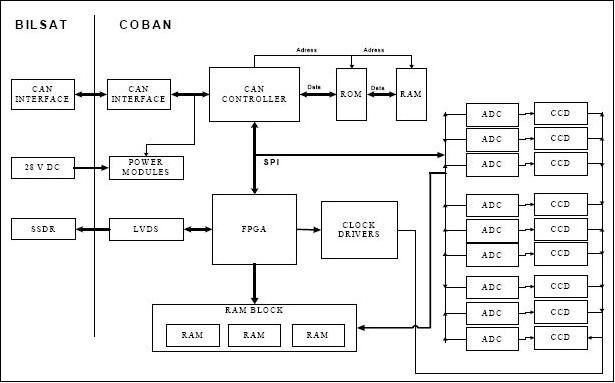
COBAN (Multiband Camera - or “Cok Bantli Kamera” in Turkish), designed and developed by Turkish engineers. The instrument is a low-resolution multispectral imaging (8 band) system, consisting of 8 individual cameras, in the spectral range of 400-1000 nm and a spatial resolution of 120 m GSD. The spectral bands of the design are: 375-425 nm, 410-490 nm, 460-540 nm, 510-590 nm, 560-640 nm, 610-690 nm, 660-740 nm, 850-1000 nm. For BILSAT-1 only four bands are being used. The detector has a size of 640 x 480 pixels. COBAN provides snapshot imagery (staring array design), it has a total mass of 6.5 kg. 36) 37)
GEZGIN (Real-Time Digital Image Processor - or “GErçek Zamanda Görüntü IsleyeN” Turkish abbreviation) is a state-of-the art floating point DSP (Digital Signal Processor) board based on TMS320C6701 and operating at 100 MHz, 32 MByte memory, a reconfigurable FPGA. GEZGIN achieves its mission by exploiting the parallelism among image processing units and assigning compute intensive tasks to dedicated hardware. JPEG 2000 image compression is implemented in hardware for multispectral imagery. Various compression ratios may be uploaded on command. 38) 39)
The image processing of GEZGIN includes capturing of 4-band multispectral images of size 2048 x 2048 8-bit pixels, compressing them simultaneously with the industry standard JPEG 2000 algorithm and forwarding the compressed multispectral image to SSDR (Solid State Data Recorder) of BILSAT-1 for storage and downlink transmission.
NigeriaSat-1
NigeriaSat-1 is a cooperative microsatellite project of NASRDA (National Space Research and Development Agency) of Nigeria and of SSTL, Surrey, UK, within the framework of DMC (Disaster Monitoring Constellation). The project is funded by the Federal Ministry of Science and Technology (FMST) of Nigeria. A team of 15 Nigerian engineers were trained by SSTL during the project period under the KHTT (Know How Technology Training) agreement. The trainees along side their SSTL counterparts designed and built the NigeriaSat-1. The vision is to make Nigeria build indigenous competence in developing, designing and building an appropriate space infrastructure. Nigeria signed the contract for the building of the NigeriaSat-1 with SSTL on November 7, 2000.
Spacecraft
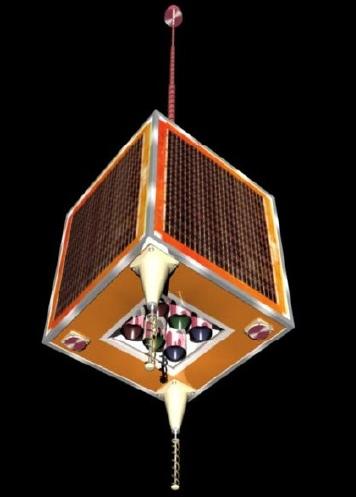
The S/C structure is a cube (60 cm x 60 cm x 60 cm) using the enhanced MicroSat-100 platform based on modular design principles (as of 2008, the MicroSat-100 bus is also referred to as SSTL-100 bus). Attitude control is provided by a combination of two systems: 3-axis stabilization is employed with four reaction wheels and three torque rods as actuators; in addition, a gravity gradient boom (actuator, 6 m long) is used for coarse stabilization. The S/C features also a 100 mN resistojet thruster for small orbit corrections. The S/C mass is 98 kg.
Launch: A launch of NigeriaSat-1, along with BILSAT-1 and UK-DMC took place Sept. 27, 2003 on a Kosmos-3M vehicle from Plesetsk, Russia. With the launch of NigeriaSat-1, Nigeria is the third African country to have a presence in space - after South Africa and Algeria.
Orbit: Sun-synchronous circular orbit, altitude = 686 km, inclination = 98.8º, the orbital period is about 97.7 min. NigeriaSat-1 holds the 180º slot in the DMC system.
RF communication: An S-band transmission system is being used. The downlink data rate is 8 Mbit/s using store and forward communications. The payload downlink also had implemented the CFDP (CCSDS File Delivery Protocol) over IP on the 8 Mbit/s payload downlink. However, the CFDP use was discontinued in 2004 in favor of Saratoga, a UDP-based rate-based transfer protocol of SSTL design. A Mission Control Ground Station (dish antenna of 3.7 m diameter), operated by Nigerians, is installed in Abuja, Nigeria, for the monitoring of the spacecraft. Use over the IP link (8 Mbps).
Mission Status
• On Sept. 27, 2012 NigeriaSat-1 had reached its end of life after an impressive nine years in orbit, outliving its design life by four years. The satellite was retired from service after its replacement, NigeriaSat-2, was launched last year. Although it was still fully functional, NASDRA engineers prepared NigeriaSat-1 for end of life by using up its propellant and lowering the satellite orbit to reduce its remaining time in space, preventing it adding to the issue of long term space debris. — The last telemetry received from the satellite was on September 27, 2012; on the October 4, 2012, the power system was finally exhausted. 40)
NigeriaSat-1 provided valuable information on Africa’s resources and environment from feeding predictive models of desertification, mapping the Niger Delta, detecting environmental change, and spotting locust threats in Algeria and Syria.
• NigeriaSat-1 is operating nominally in 2012 (completing its 9th year on orbit on Sept. 27, 2012). 41)
• NigeriaSat-1 is operating nominally in 2011.
• NigeriaSat-1 is operating nominally in 2010.
Sensor Complement (SLIM6)
The imaging system of NigeriaSat-1 is identical to the imager flown on AlSAT-1.
SLIM6 (Surrey Linear Imager Multispectral 6 channels). The overall objective is to provide medium-resolution multispectral imagery for disaster monitoring services with large area coverage capabilities. Three spectral bands are provided in the ranges: 0.52-0.62 µm, 0.63-0.69 µm, and 0.76-0.9 µm (the SLIM6 bands come closely to those of Landsat-7 bands 2, 3, and 4). SLIM6 employs pushbroom imaging technology using two cameras per band (mounted in a double-barrel cross-track configuration) thus providing a dual (slightly overlapping) swath with a combined swath width of 600 km at a spatial resolution 32 m GSD (Ground Sampling Distance). Each detector line array consists of 10,000 silicon element cells in cross-track. The detector output is digitized to 10 bits and processed to 8 bits radiometric resolution. The pushbroom system is capable of providing continuous imagery in flight path direction. The source data are stored in an onboard solid-state memory of 2 x 512 MByte capacity.
The EO (Earth Observation) imagery generated by NigeriaSat-1 and the partner microsatellites is being used to provide rapid coverage of natural and man-made disasters, but it is also being used for monitoring the rapidly changing and dynamic aspect of agriculture, the environment, pipeline oil spillages and other national remote sensing requirements.
UK-DMC (United Kingdom - Disaster Monitoring Constellition)
UK-DMC-1 was developed at SSTL within the microsatellite program of BNSC (British National Space Center), called MOSAIC (Micro Satellite Applications in Collaboration). The design of UK-DMC is according to the DMC standard, with added research and development payloads. Like all of the standard DMC satellites, it carries an optical imaging payload developed by SSTL to provide 32 m ground resolution imagery with an exceptionally wide swath width of over 640 km. The payload uses green, red and near infrared bands equivalent to Landsat TM+ bands 2, 3 and 4.
Launch: A launch of UK-DMC, NigeriaSat-1, along with BILSAT-1 took place Sept. 27, 2003 on a Kosmos-3M vehicle from Plesetsk, Russia.
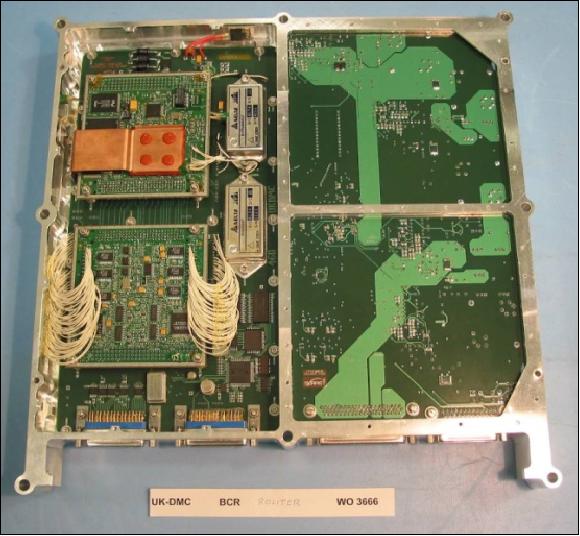
RF communications: In comparison to the other DMC satellites, UK-DMC features increased onboard data storage with 3 SSDRs (Solid-State Data Recorders, each with a capacity of 1.5 GByte. Two SSDRs are equipped with PowerPC processors (Motorola MPC8260), supporting the imaging cameras. The third SSDR is based around a StrongARM processor, supporting the onboard GPS reflectometry experiment.
The RF communication is in S-band. Images are returned to the SSTL mission operations center at a data rate of 8.134 Mbit/s. The uplink data rate is 9.6 kbit/s.
Both links use the proven IPv4/Frame Relay/HDLC encapsulation techniique. IPv6 has been tested over these links, using the onboard CLEO router. The IP-based transport protocol used for downloading images is SSTL’s original implementation of Saratoga, retroactively called version 0, running over UDP/IP (User Datagram Protocol/Internet Protocol.).
Mission Status
• In November 2011, UK-DMC-1 was retired from service after over 8 years in orbit. UK-DMC-1 retired gracefully; like all recent SSTL missions it was prepared for its ‘End of Mission’ as a precautionary measure to minimize space debris. This process began in September 2010 and involved using up its remaining propellant to passivate the satellite, and also lowering the orbit to reduce its remaining time in space before burning up in the Earth’s atmosphere. When this work was completed the satellite continued to be fully operational, continuing to relay image data down to SSTL’s ground station. 42)
Why retire now? Well, the satellite’s battery ages over the mission lifetime and has now reached a point, well beyond its original mission design life, where it is unable to provide enough power to support full payload operations. With this in mind, the SSTL Spacecraft Operations Team have suspended the UK-DMC-1 workload, and the satellite is now only monitored periodically from SSTL Mission Control in Guildford.
• UK-DMC is operating nominally in 2011.
• In September 2010, the orbit of UK-DMC-1 was lowered from its operational altitude of 675.4 km to 596.9 km (perigee). The reason: after 7 years in orbit the spacecraft is reaching the end of its operational life. The project used unspent propellant to reduce the orbital lifetime and the probability of generating space debris. - The satellite has achieved all of its mission objectives and remains in good condition well beyond its design life of 5 years and is still acquiring images for SSTL’s remote sensing subsidiary DMCii. 43)
• On January 28, 2008, first DTN (Delay/Disruption Tolerant Networking) demonstrations were conducted between the partners SSTL and NASA/GRC. The communication experiments involved the transmission of image files from the spacecraft to the ground via the 'bundle protocol' which simulated fragments of an observed scene in several passes and the subsequent ground restoration of the image fragments to a complete scene again (see DTN description below). 44) 45) 46)
• On March 29, 2007, the Cisco router CLEO was successfully configured by NASA/GRC (Glenn Research Center) to use IPsec and IPv6 (Internet Protocol version 6) technologies in space. IPv6 is the next generation of the Internet Protocol (IP), designed to improve on the popular IPv4 that built the Internet, while IPsec is the protocol used to secure communication across IP networks.
NASA/GRC was able to reach across the Internet to the UK-DMC satellite from Cleveland, Ohio via SSTL's Guildford, England, Mission Control Centre, using mobile routing. The 3251 router in orbit was configured and tested during a twelve-minute period while the UK-DMC satellite passed over the ground station. The Cisco Systems router and firewall used in SSTL's Mission Control Network were given simple software upgrades to add IPv6 capabilities to allow this end-to-end IPv6 testing to take place.
Sensor Complement (SLIM6)
The prime wide-swath imaging system of UK-DMC is identical to the imager flown on AlSAT-1 and on NigeriaSat-1 - namely SLIM6 (Surrey Linear Imager Multispectral 6 channels).
New technology introduction / secondary experiments on UK-DMC: (GPS Reflectometry Experiment, Water resistojet, CLKEO, DTN networking experiment)
GPS Reflectometry Experiment
The GPS Reflectometry Experiment was developed by SSTL and supported by BNSC. The objective is to demonstrate GPS reflectometry measurements from the sea surface. The generic design of the DMC satellites includes both a dual antenna SSTL SGR-10 (Space GPS Receiver-10) and a solid state data recorder, fortuitously carried in the same module tray, and so the reflectometry instrument could be constructed from electronics mostly already present in the satellite (Figure 26). 47) 48)
Three antennas are being used, two space-pointing (zenith) and one high gain Earth-pointing (nadir) antenna. The signals from each antenna are being down-converted to IF (Intermediate Frequency) by three GPS L1 frontends. The sampled IF signals may either be processed in realtime using the 24 GPS C/A code channels, or directly logged by a data recorder at IF. The IF is 2-bit sampled at 5.71 Mbit/s and the data recorder logs sampled signals from the nadir and from one of the zenith antennas. The data recorder also logs the occurrence of the GPS receiver pulse per second signals to help match the data collection time with GPS time. Up to 40 seconds of continuous sampled data can be recorded.
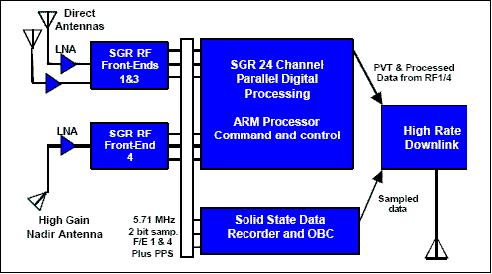
While sampling is taking place, the GPS receiver is being positioning according to normal operations using signals received by the zenith antenna. The information typically available from the GPS receiver is being stored (simultaneously with the raw sampled data): position, velocity, time, satellites tracked, satellite positions, pseudoranges, Doppler shift, phase, etc. This information is being used for assisting the search for reflected signals, rejection of direct signals from nadir antenna, as well as for orbit determination. - In addition to raw IF sampling, the GPS receiver can be reprogrammed in orbit with code to process the reflected signals in real-time using its 24 parallel channels and a relatively powerful processor (ARM60B) to handle the additional calculations.
To accommodate this GPS reflectometry experiment, an additional frontend was added to the SGR-10, the sampled IF signals were connected to the data recorder via an LVDS daughter-board and a new nadir antenna was added.
The GPS Reflectometry Experiment has provided a valuable verification platform for space-based bistatic radar remote sensing. As of 2006, it has collected over 50 data sets, mostly from the ocean but also from land and ice surfaces. 49) 50) 51) 52) 53) 54) 55)
• SSTL is using the UK-DMC imagery to investigate the full range of uses for large-coverage images with medium spatial resolution and high temporal resolution. As part of the DMC constellation.
Water Resistojet
An experimental micropropulsion system - a water resistojet- is being tested (designed and developed at SSTL), using water as its propellant. The design is aimed at low-cost nanosatellite missions. A series of in-orbit experiments will be performed to characterize the actual flight thrust and specific impulse of the system. This so-called 'green' propellant is non-toxic, non-hazardous to ground operators and results in improved specific impulse over conventional cold gas nitrogen, at a significantly lower cost.

During the first in-orbit firing (March 2004), the thruster was pre-heated to 200 ºC. Pre-heating ensures that no liquid phase water is ejected, only steam. The spacecraft experienced 3.3 mN (milliNewton) of thrust over a 30 second period.
The miniature resistojet, with a total mass of 188 gram and a thruster mass of 13 gram, uses just 3 W of power to heat the propellant (operational temperature up to 250ºC), emitting steam through a conventional rocket nozzle to generate thrust. The hotter the propellant, the higher specific impulse performance achieved. The thruster is mounted in such a way that it produces a yaw torque around the spacecraft's gravity gradient boom. After the firing, the ACS detected a yaw disturbance of 55º. - The experiment was conducted by SSTL with assistance from ESA, the Polyfex Space company of UK, and ALTA of Italy. 56) 57)
CLEO (Cisco router in Low Earth Orbit)
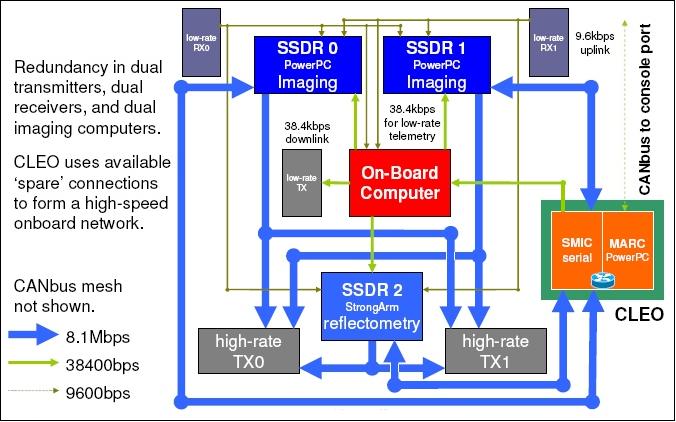
CLEO is a secondary experimental payload, a commercial off-the-shelf (COTS) internet router, namely MAR (Mobile Access Router), which has been supplied by Cisco Systems Inc., San Jose, CA for flight onboard UK-DMC as an experimental testbed for a range of mobile Internet Protocol (IP) applications. CLEO consists of two PC-104/Plus-based circuit boards: the PowerPC-based Cisco 3251 Mobile Access Router (MAR) processor card, and a four-port serial mobile interface card (SMIC). Although this mobile access router is capable of supporting 100 Mbit/s Fast Ethernet connections, there is no Ethernet onboard the UK-DMC satellite, and 8.1 Mbit/s serial interfaces are used to connect to other payloads. 58) 59) 60) 61) 62)
The onboard serial links are designed to match the use of an 8.1 Mbit/s serial interface on a Cisco 2621 router receiving the output of the downlink from the modem in each ground station; the downlink is extended to each payload as required. Two cards were mounted on an SSTL designed `motherboard' that provided connectivity and power control. Total power consumption of the combined unit is approximately 10 W at 5 V. The router was not radiation-hardened or otherwise qualified for spaceflight (i.e., there is no defined life cycle, part of the test is to see how long the router will operate).
As an experimental payload, the router is not connected directly to the satellite downlink. Instead, when testing the router during a 10 minute pass over a ground station, the other onboard computers form a virtual star topology centered on the router, and frames from the router are `passed through' an onboard computer to be copied out to the downlink. While being tested during satellite passes over ground stations, CLEO has operated as expected on orbit, both in power draw and performance.
All satellite links carry IP packets inside frame relay and HDLC (High-level Data Link Control) encapsulation. This protocol encapsulation is an engineering choice made as a result of experience gained previously testing IP use with SSTL's UoSAT-12 satellite. Payloads are given dedicated access to the downlink according to an uploaded schedule, and must flood the downlink with packets to transfer as much data as possible in the limited time available during a pass. Image transfer from satellite to ground station uses a custom rate-based UDP-based file transfer protocol designed and implemented by SSTL. The ground stations belonging to SSTL and to the partner countries owning other satellites in the Disaster Monitoring Consortium are networked together using IP. PCs on each ground station's Ethernet LAN (Local Area Network) run applications for dealing with satellite telemetry and images.
Both the CLEO router and the IP-based VMOC (Virtual Mission Operations Center) software application [note: VMOC is a joint US governmental/DoD initiative using Nautilus Horizon software from General Dynamics; the VMOC project is funded by the RAI-NC (Rapid Acquisition Incentives-Net Centricity) program of DoD] were able to build upon SSTL's adoption of IP and the IP-based infrastructure of the satellites and ground stations that was being built, and so could treat the satellites as nodes on a large IP-based network that seamlessly merged space and ground assets. The capabilities demonstrated here are evolutionary and desirable outcomes emerging from all parties adopting use of the Internet Protocol an being able to collaborate fully technically as a result.
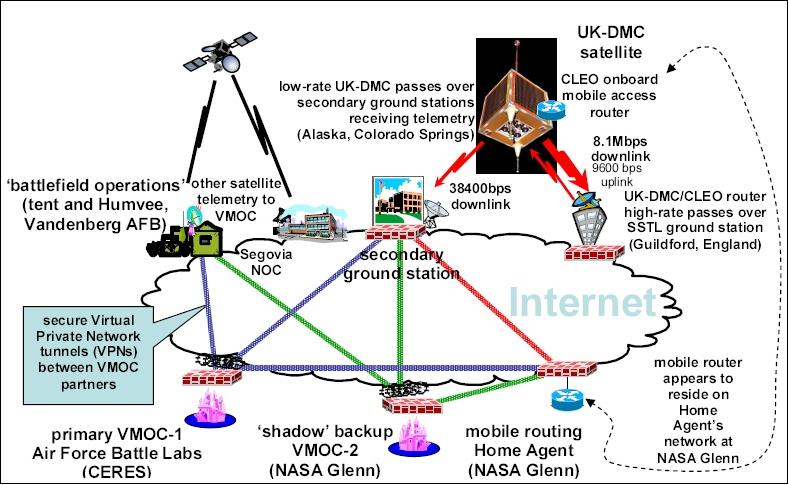
The VMOC and router testing was a collaborative experiment centered on the US Air Force, the Army and NASA/GRC (Glenn Research Center), and involving other organizations. The VMOC demonstrations occurred `in the field' during June 1-13, 2004, followed by a three-day demonstration during June 14-16, 2005. Operators at the VAFB demonstration specified areas of the Earth, received satellite images and telemetry, and commanded the router. Users in the field relied on mobile routing to communicate across the Internet via a home agent at NASA/GRC in Cleveland, OH, to the Cisco router onboard the satellite via the supporting SSTL ground station (Figure 31).
The use of mobile routing provided CLEO with a static IP address that the VMOC could use to command the spaceborne router, entirely independent of the ground station currently visible to the satellite. CLEO can currently be accessed either via SSTL's own ground station in Guildford, England, or via the USN (Universal Space Network) ground station in Poker Flat, Alaska, which replicates the SSTL ground station and modem use.
Further demonstrations of CLEO and VMOC have been held:
• On Nov. 5, 2004, VMOC/MPS (Mission Planning System) imaging request operations, using the SSTL ground station to task the UK-DMC satellite, were demonstrated at Air Force Space Command Headquarters in Colorado Springs, CO. Use of IPv4.
• On 18 Nov. 18, 2004, further demonstrations took place to the leadership of Air Force Space Command during its Commanders' Conference in Los Angeles, CA
• On Dec. 2, 2004, the joint VMOC team performed a similar demonstration to leadership from the Air Staff and Joint Staff in the Washington, DC area
• On May 10, 2005, CLEO and VMOC were demonstrated at the AFEI (Association For Enterprise Integration) Net-Centric Operations Conference in Washington, DC. The USN Alaska ground station was used in this configuration to access the router during two satellite passes
• On October 17-21, 2005, CLEO was also demonstrated at the IEEE/AFCEA MILCOM (Military Communications Conference) 2005, Atlantic City, NJ, USA.
• CLEO was configured for IPv6 and IPsec use in March 2007, and successfully tested with both features on 29 March 2007. IPv6 is intended to eventually replace IPv4 terrestrially, as the larger address space and simpler routing tables of IPv6 ameliorate the most pressing problems with the scalability of IPv4, namely:
- Exhaustion of availability of unused address space, requiring workarounds such as Network Address Translation (NAT) that become unneeded in IPv6
- Size of backbone routing tables needed to keep the Internet fully interconnected.
IPsec is the common, popular, way to secure network assets terrestrially, so it makes sense to reuse this technology for the space environment. Demonstrations of IPsec in space show how the very similar HAIPE (High Assurance IP Encryptor) protocols, mandated for US DoD and NATO use, could be used in these environments.
The use of CLEO has shown that mobile networking is a viable technology for networking across disparate and separate networks for ground stations in different continents. The UK-DMC satellite has demonstrated that handling satellite command and telemetry and data delivery based upon the Internet Protocol and related commercially-used standards is possible and can be successful. Use of VMOC with the SSTL mission planning system (MPS) shows that a successful high-level approach to exchanging data between complex systems can build on open standards based around the Internet Protocol.
DTN (Delay/Disruption Tolerant Networking)
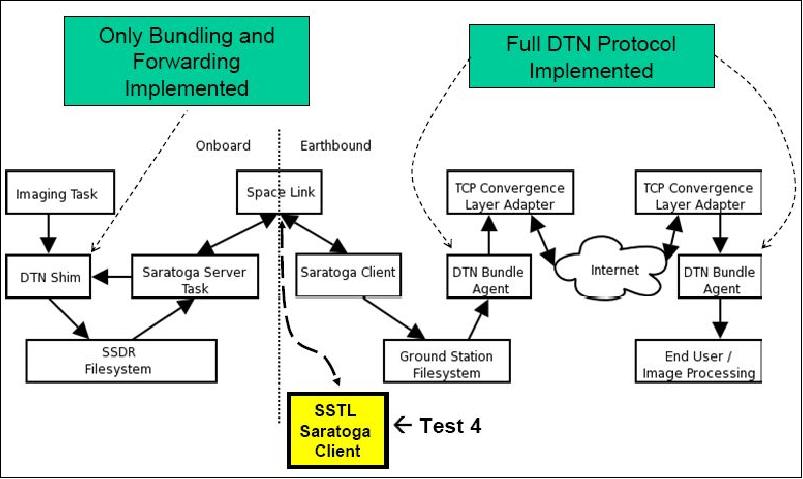
DTN is a networking experiment on the UK-DMC spacecraft conducted by teams of NASA/GRC and SSTL. Figure 32 illustrates how DTN bundling configuration is implemented onboard the UK-DMC and in the ground infrastructure (CLEO is not being used for DTN bundle testing). The Saratoga protocol acts as a bundle transport ‘convergence’ layer on the space-ground link. Only the bundle forwarding portion of DTN was implemented onboard as a simple networking “shim” since available code space is constrained, and a goal was to have the onboard DTN implementation be transparent to normal UK-DMC operations, living side-by-side with the existing operational code in a non-disruptive manner. 63) 64) 65)
Hence, the DTN-bundle-receiving intelligence only needed to be present in the ground station implementation of the Saratoga client and the DTN bundle agent. The Saratoga client in the ground station queries the UK-DMC satellite for a directory of files, and then requests any files with a “.dtn” extension and an associated satellite image file. The satellite image file and associated metadata files are transferred to the ground, where the Saratoga client reassembles the bundles and then presents them to the full DTN bundle agent – full DTN-2 bundle agent implementations were used both at the ground station and the final DTN destination.
The overall objectives of the DTN experiments were:
• Demonstrate that DTN code and general SSTL code can coexist without affecting normal SSTL spacecraft or ground station operations
• Test DTN bundle transfers from UK-DMC to SSTL
• Demonstrate proactive fragmentation of DTN bundles (proactive fragmentation is required to perform large file transfers over multiple ground stations)
To validate proactive fragmentation, the DTN fragments were reassembled at the final DTN destination.
Background: DTN has been defined as an end-to-end store-and-forward architecture capable of providing communications in highly-stressed network environments. To provide the store-and-forward service, a “bundle” protocol (BP) sits at the application layer of some number of constituent internets, forming a store-and-forward overlay network. Key capabilities of the BP include:
- Custody-based retransmission – the ability to take responsibility for a bundle reaching its final destination
- Ability to cope with intermittent connectivity
- Ability to cope with long propagation delays
- Ability to take advantage of scheduled, predicted, and opportunistic connectivity (in addition to continuous connectivity)
- Late binding of overlay network endpoint identifiers to constituent internet addresses.
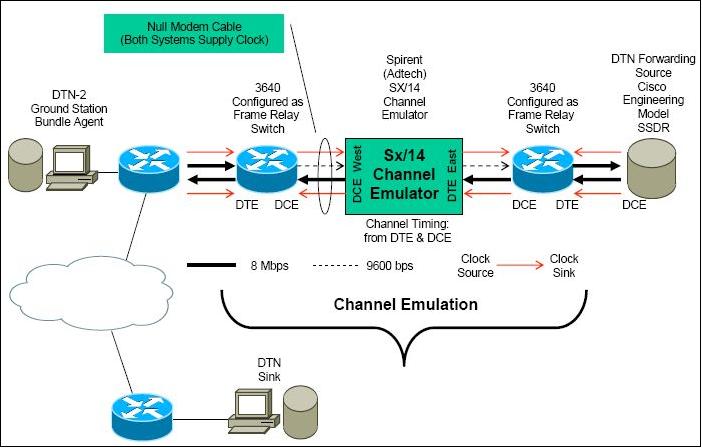
Ground development and testing: A DTN testbed was used where bundling over Saratoga was prototyped (Figure 33). This development testbed, which reused the CLEO ground-based testbed duplicating in-orbit UK-DMC hardware, consisted of:
• The PowerPC-based SSDR that resides in the CLEO (Cisco router in Low Earth Orbit) engineering model, where the bundle file is generated.
• A channel emulator that emulates the 9.6 kbit/s uplink and the 8.134 Mbit/s downlink. This uses a Spirent SX-14 data link simulator to provide channel delay and bit-error-rate emulation independently on both the uplink and downlink
• A DTN bundle agent acting as the ground station. This bundle agent queries the DTN source onboard the SSDR for files and bundles using the SSTL Saratoga version 0 file transport protocol
• A remote sink for DTN bundles – another bundle agent.
DTN Demonstration Tests
• The first attempt at DTN testing was undertaking on January 28, 2008. This involved SSTL to instruct the UK-DMC satellite to acquire an image (150 MByte) over the Gulf of Khambhat, India.
- Bundles were created onboard the UK-DMC satellite. When the image of the Gulf was acquired, the large image was stored in the SSDR and automatically named by the operating system.
- Three UK-DMC satellite passes were taken to test the latest NASA/Cisco/SSTL firmware code supporting Saratoga/DTN bundling
- Four tests were performed:
1) Basic image file download, using existing Saratoga file transfer techniques (GRC’s implementation of Saratoga version 0)
2) Download of the same image file as a DTN bundle
3) Download of the same file, using DTN proactive fragmentation with 80 MByte preconfigured fragments
4) Normal file transfer using SSTL’s workstation and SSTL’s implementation of Saratoga version 0. This provided an operational control to be compared with the first three experiments.
Afterwards, three file transfer tests were conducted between the SSTL ground station and NASA/GRC (Glenn Research Center). The details are described in Ref. 63).
Initial results showed all image files reconstructed at the GRC DTN bundle sink had the correct file size, but the contents did not match as there were long strings of zeros in various places in each file. The placement of these long strings of zeros was different for each file. SSTL performed an additional ‘control’ test, test 4, where they removed the GRC bundle agent and Saratoga client and replaced that machine with SSTL’s normal Saratoga client machine (Figure 32). The result was that SSTL downloaded the 150 MByte image without errors.
On the first pass, tests 1 and 2 were successful regarding operation of DTN and the ability to either use either Saratoga for straight file transfers or Saratoga with bundling to transfer DTN bundles between the UK-DMC payloads and the ground, demonstrating bundle delivery from space. Also, the DTN-2 forwarding agent, Bundling-SSTL, was able to automatically forward the DTN bundles to a DTN-2 bundling agent at NASA Glenn Research Center, Bundling-GRC1. It was then possible to extract the image file from the DTN bundle.
Significance of the DTN tests: The first pioneering demonstration of the 'bundle protocol' in space has been conducted successfully by SSTL and NASA/GRC as test partners. Sensor data was successfully delivered from the UK-DMC satellite using the disruption- and delay-tolerant networking protocol designed for the Interplanetary Internet. The first complete image was downloaded in fragments across separate satellite passes to a 'bundle agent' in SSTL's ground station. The bundles were then transmitted via Internet to the bundle agent of NASA/GRC and reassembled into a complete image file. That file was then delivered back to SSTL for post-processing and orthorectification. This enabling technology of the DTN protocol will have a significant impact on future satellite communications.
With the addition of the Saratoga Delay Tolerant Networking protocol over IP to provide robustness, UK-DMC was able to act like an internet node in space.
Beijing-1 (China DMC+4)
The Beijing-1 microsatellite (formerly China DMC+4) is a cooperative Earth observation project of SSTL (Surrey Satellite Technology Ltd.), UK, and the Beijing LandView Mapping Information Technology Company Ltd (BLMIT) within the framework of DMC (Disaster Monitoring Constellation). The project is funded by the Chinese Ministry of Science & Technology, Beijing. It combines SSTL's standard Disaster Monitoring Constellation (DMC) multispectral camera with a high resolution panchromatic imager. BLMIT is a private company established to manage the commercial data distribution and services of Beijing-1. The project comprised also the installation in Beijing of a Mission Control Center, consisting of an S-band ground station and associated control systems, and the support to the customer payload data X-band ground station. 66) 67) 68)
Note: The Bejing-1 mission is regarded as the first of the next-generation DMC missions. - Beijing-1 is to be followed by UK-DMC-2 and Deimos-1 of Deimos Space SL, Spain, with scheduled launch dates in 2008.
Spacecraft
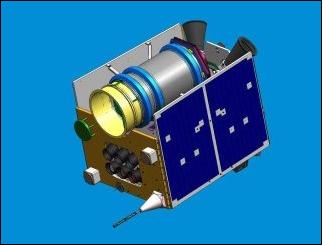
The Beijing-1 spacecraft uses the enhanced MicroSat-150 platform of TopSat heritage based on modular design principles (Beijing-1 happens to be the second incarnation of the Microsat-150 platform by SSTL - also referred to as SSTL-150). The spacecraft measures 900 mm x 770 mm x 912 mm, it has a mass of 168 kg. The structure consists mostly of Al/Al honeycomb materials. Three body-mounted solar panels are used with a four point separation system. Electric power of 50 W is generated (use of GaAs/Ge solar cells). A redundant set of NiCd batteries are carried with a capacity of 8Ah, leading to a maximum “depth of discharge” well under 12% during nominal operations. Power distribution is at 5 V and at 28 V (regulation at 5 V).
The spacecraft is 3-axis stabilized. The core spacecraft avionics for Beijing-1 is based on a heritage configuration used on all SSTL missions, and comprises a module trays stack incorporating attitude control, power, data handling and communication functions. It is largely dual redundant, but can be tailored for specific mission needs due to its modular nature. An attitude control module interfaces with two navigation fluxgate magnetometers, three dual-wound torque rods (MTQ-10). Three of the four dual-axis sun-sensor interfaces are employed on the mission (SSS-50 sun sensors). In addition, a redundant Altair HB star tracker is being used. The SGR-10 GPS receiver (24 channels) provides 15 m (3σ) position determination with redundant RF inputs, and also provides the basis for time synchronization and distribution. The high-performance ADCS (Attitude Determination and Control Subsystem) is providing a pointing control of 0.1º (3σ) and a stability of 2.5º/s x 10-3. A FOR (Field of Regard) of ±30º in cross-track is provided for instrument pointing.
The spacecraft platform is designed to serve missions with lifetime requirements of 7 years in LEO. Its structure is modified to facilitate its launch as part of a constellation; a feature employed on the RapidEye mission (developed by SSTL), which aims to accommodate five of these platforms on a single launcher.
The payload instruments are supported by a 28 V unregulated, switched power bus, and a redundant CAN (Control Area Network) bus. The options for interfaces such as MIL-1553B, RS422, RS485 and SpaceWire interfaces also exist but are not implemented on this platform. Dual redundant flight computers are provided based on Intel 80386EX processors, configured with 32 MByte capacity.
All DMC spacecraft carry a liquefied gas Butane system with resistojet; however, a 60 bar Xenon system augmented by a resistojet is selected for this mission, as it avoids potential attitude disturbance through sloshing. The system is dual-redundant where appropriate, provides 17 m/s delta-velocity, and is split into two modular units. The onboard propulsion system is being used for constellation maintenance.
RF communications: Imagery is downlinked in X-band using QPSK modulation at data rates of 20 or 40 Mbit/s, with an RF power of 6 W. Near omni-directional antennas are employed to allow the spacecraft to off-point and image whilst returning data over the downlink. The S-band system consists of: 2 uplink receivers (9.6 kbit/s), 2 patch antennas, 2 downlink transmitters (38.4 kbit/s), and 2 monopole antennas. The S-band downlink is configurable for data rates between 9.6 kbit/s to 8 Mbit/s.
Data from the imagers can be stored across several solid state data recorders [SSDR of 4 GB and two hard disk drives (HDD) each of 120 GB], and is retrieved when in view of the ground station. An on-board hardware data compression is implemented, using a fully re-programmable high capability DSP unit. Data can be passed through an encryption unit during downlinking, which can be controlled and configured over the spacecraft data handling bus. A proprietary encryption method is employed, and the encrypted data is then V.35 scrambled and convolutionally encoded (1/2 rate, k=7) in the X-band downlink transmitter.
Note: An onboard implementation of 2 conventional HDDs (as used in PCs) is an experiment on Beijing-1 to demonstrate its utility in space. Prior to launch, extensive vibration tests were conducted on various HDD brands. An enclosure was developed (to reduce the random vibration environment experienced by the HDDs during launch to acceptable levels) that allowed conventional of-the-shelf HHDs to be used on board a satellite. So far in the mission, the HDD units are operating correctly. 69)


Launch: A launch of the Beijing-1 microsatellite took place on Oct. 27, 2005 on a Cosmos-3M launch vehicle from the Plesetsk Cosmodrome, Russia (launch provider: Polyot). Other spacecraft of this multiple launch were: TopSat (UK), SSETI-Express (European students, ESA), Mozhayets-5 (Russia, failed to separate), Sinah-1 (Iran), 3 CubeSats all released from SSETI-Express: UWE-1 (University of Würzburg, Germany), XI-V (University of Tokyo, Japan), NCube-2 (Norwegian Student Satellite), and Rubin-5 (OHB, Bremen, Germany).
Orbit: Sun-synchronous circular orbit, altitude = 686 km, inclination = 98.8º, the orbital period is about 97.7 minutes. Beijing-1 was launched into a new orbit plane with a 10:30 hour descending node (v. the 10:15 ascending node for the previous four DMC spacecraft).
Mission Status
• The Beijing-1 spacecraft and its payload are operating nominally in 2012.
• The Beijing-1 spacecraft and its payload are operating nominally in 2011.
The mission addresses a range of applications in high-resolution mapping and disaster monitoring, including land cover analysis for the Chinese territories, precision agriculture, geological surveying, urban development. 70)
• With the 240 Gbyte onboard solid-state data storage capability, it is possible to store image tracks over 4000 km in length, supporting systematic mapping of large areas. This has supported the development of data products such as the mapping of the entire country of China every 6 months using the multispectral sensor.
• Within China, the Beijing-1 data is being used extensively in urban planning, in particular in preparation for the Beijing 2008 Olympics. For some products, the multispectral images are being combined with the panchromatic images providing pan-sharpened imagery.
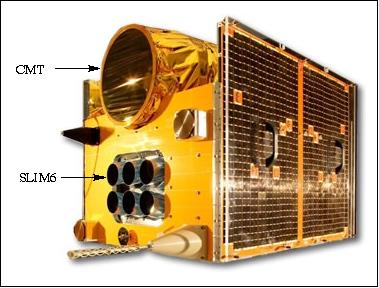
Sensor Complement (SLIM6, CMT)
The customized microsatellite has specific enhancements to provide accommodation for the two imagers: a 32 m multispectral imager also flown on AlSAT-1, UK-DMC and NigeriaSat-1, plus a new 4 m panchromatic imager (CMT).
SLIM6 (Surrey Linear Imager Multispectral 6 channels)
The overall objective is to provide medium-resolution multispectral imagery for disaster monitoring services with large area coverage capabilities. Three spectral bands are provided in the ranges: 0.52-0.62 µm, 0.63-0.69 µm, and 0.76-0.9 µm (the SLIM6 bands come closely to those of Landsat-7 bands 2, 3, and 4). SLIM6 employs pushbroom imaging technology using two cameras per band (mounted in a double-barrel cross-track configuration) thus providing a dual (slightly overlapping) swath with a combined swath width of 600 km at a spatial resolution 32 m GSD (Ground Sampling Distance). Each detector line array consists of 10,000 silicon element cells in cross-track. The detector output is digitized to 10 bits and processed to 8 bits radiometric resolution. The pushbroom system is capable of providing continuous imagery in flight path direction. The source data are stored in an onboard SSDR (Solid-State Data Recorder) of 1.5 GB capacity.
CMT (China Mapping Telescope)
CMT is also referred to as DMC+4. CMT is an Earth imaging high-resolution panchromatic camera (Figure 38) designed and developed under contract by Sira Electro-Optics Ltd., Chislehurst, Kent, UK (Note: As of spring 2006 Sira Electro-Optics Ltd. was bought by SSTL and is now referred to as the Optical Payloads Group). CMT provides panchromatic imagery with a GSD (Ground Sample Distance) of 4 m at nadir, the swath width is 24 km. With the body-pointing capability of the spacecraft (±30º in cross-track), the instrument provides a FOR (Field of Regard) of 800 km from an orbital altitude of 686 km. 71) 72)
Spectral band | 500-800 nm (panchromatic) |
Spatial resolution of panchromatic imagery | 4 m (GSD at nadir) |
Swath width | 24 km (up to 15 minutes of continuous mapping operations/orbit) |
FOR (Field of Regard) | 800 km |
Aperture of the primary mirror | 31 cm diameter |
Focal length | 1370 mm |
MTF at Nyquist frequency | ≥19.6% (at center), ≥ 13.6% (at edge) |
SNR (Signal-to-Noise Ratio) | 210 |
|
|
Instrument mass; size; power consumption | 25 kg; 79 cm x 38 cm x 37.8 cm; 12 W (at 28 V) |
Rather than developing a custom imaging mission solution, the CMT design philosophy adopted was to develop a generic and scalable imaging instrument, to fit on a scalable spacecraft platform. This then would allow the platform and instrument to be configured for variants of this mission when required.
The optics system design of CMT (Figure 39) employes a conventional on-axis form, a Dall-Kirkham telescope, with an aspheric primary mirror having a diameter of 310 mm manufactured in Zerodur and a spherical secondary in fused silica. Four fused-silica refractive corrector elements are mounted near the focal plane. To control stray light, internal baffles are mounted from the secondary mirror and from the front of the corrector lens group.
The telescope is near diffraction-limited to provide a spatial resolution of 4 m. This requires distortion tolerances of < 0.1 wavelength and an alignment between the primary and secondary mirrors within a few arcseconds. A CFRP (Carbon Fiber Reinforced Plastic) is used for the structure, and Invar for the critical mirror mounts and glasses such as Zerodur and fused silica. The telescope is mounted to the satellite via an isostatic mount incorporating flexible legs, to avoid strain from differential thermal expansion between it and the satellite which is constructed mainly of aluminum.

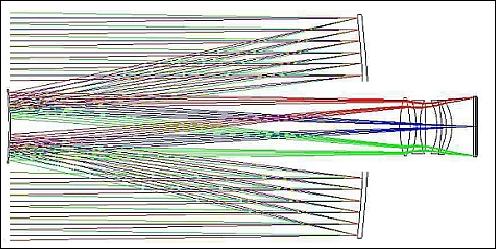
Parameter | Required | Achieved |
GSD (Ground Sample Distance) | 4 m | 4 m |
Swath width | 24 km | 24 km |
Spectral range (panchromatic) | 500-800 nm | 500-800 nm |
Band edge accuracy across FOV | ± 30 nm | + 2 nm |
Energy in pass-band | ≥ 90% | 98% |
MTF at Nyquist | ≥ 15% (edge), ≥ 10% (edge) | ≥ 19.6% (center), ≥ 13.6% (edge) |
SNR (Signal-to-noise ratio) | ≥ 140 | 210 |
Instrument mass | ≤ 25 kg | 24 |
Power | ≤ 12 W | 11.9 W |
Instrument volume (mounting feet excepted) | 790 mm x 400 mm x 400 mm | 790 mm x 380 mm x 378 mm |
Detectors: The linear CCD used as the detector is an e2v CCD21-40 device. This has 12,288 elements each 8 µm square It is read out through 4 output nodes, two at either end dealing with odd and even interlaced pixels from each half of the device The instrument specification required 6,000 imaging pixels but the 12,288 device was readily available, so it was used together with an optical mask exposing the central 6,000 pixels plus margin The CCD is read out in a manner analogous to a frame transfer CCD, each of the four imaging sections of 1,500 pixels (left / right, even / odd) being clocked to a position under the mask during the first line period and then read out of the chip during the second.
The CCD is normally only switched on during imaging periods of up to 15 minutes per orbit, and is mounted on a focal plane material with high thermal capacity, in order to limit the rise of CCD temperature (and hence change in dark signal) during this period. Thermal modelling predicted a rise of 3ºC during the imaging period. Although this arrangement was designed to limit temperature rise during normal operation, the instrument would also survive continuous operation.
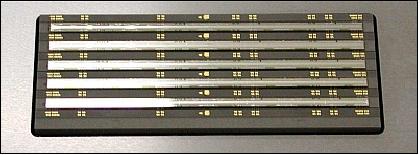
Electronics unit: A FPGA is used for the digital electronics unit which controls the CCD sequencing, formats the data and organises the interface with the satellite. The data output is 10 bits which is derived by truncating the output of a 12 bit ADC. The data interface is a special-purpose serial interface using data/strobe arrangement, effectively a modified IEEE-1355, while the command interface is a UART type. Input and output is on LVDS (Low Voltage Differential Signaling) and all interfaces are redundant. The digital data is passed to the satellite for storage, further processing and transmission to ground.
Imager support mode | Description | Applications |
SLIM6 window pseudo real-time imaging | SLIM6 image capture in windowing mode, with download in pseudo-real time. Pan image of CMT can be captured at same time and stored in mass storage device | - Disaster monitoring |
SLIM6 strip real-time imaging | SLIM6 strip image capture, with download in real-time. Pan image of CMT can be captured at same time and stored in mass storage device | - Disaster monitoring |
CMT: Pan real-time imaging | Pan image being captured, compressed and downloaded in real- time. SLIM6 image might be stored at the same time if desired | - Local mapping - Support for local emergencies |
CMT: Pan image storage | Pan image is captured and stored in mass storage device (selectable volatile or non-volatile) | - Mapping |
DMC Operations and Data Providers - DMCii (DMC International Imaging Ltd.)
The DMC constellation is being operated by an international consortium. Each of the satellites is independently owned and operated by one nation or organization, but the whole constellation is designed to act as a single coordinated instrument if required. The system has been planned to exploit the synergy of multiple satellites in space by: 73) 74)
• Designing the satellites to work together
• Launching them into the same orbit
• Agreeing to position them optimally around the orbit
• Collaborating in the exchange of data
• Sharing ground station resources
• Agreeing data archiving and format protocols.
Each Member of the DMC Consortium is able to operate completely independently if they wish, but by agreeing to share unused capacity with other Members they gain the benefits of daily imaging, double the imaging capacity, and greater flexibility in down-linking data through other ground stations when required.
By working together the DMC satellites can provide a much higher value to each Member. Part of this is expected to come from the sales of data. The constellation can provide the unique space capabilities of daily revisit and very large images. This is expected to enable new applications of EO data to be developed, and there is considerable commercial interest being shown in acquiring the data. The generation of income from the satellites is an important element of a sustainable space program.
Commercial Structure
To develop the coordinated aspects of the constellation a separate company, DMC International Imaging Ltd. (DMCii) has been set up in 2004 by all Members of the Consortium. The DMCii company is based at Surrey, UK. This company coordinates disaster response, commercial imaging, and manages data quality across the constellation. DMCii is also a UK supplier of remote sensing data products and services for the international EO (Earth Observation) markets. DMCii supplies both program-on-request and archived optical satellite imagery provided by the DMC satellites. DMC data is being used in a wide variety of commercial and government applications including agricalture, forestry and environmental mapping.
In partnership with BNSC (British National Space Center) and the other DMC member nations DMCii uses the commercial exploitation of the DMC constellation to fund coordination of the DMC operational support for humanitarian use in the event of major disasters. DMCii works with the UN, ESA, and the International Charter: Space and Major Disasters during disasters such as Tsunami, Fire, Flooding, Earthquuakes, and Hurricanes.
The DMC satellites are operated on an image-store-downlink basis, so that an image schedule is uploaded, the satellite then carries out the tasks, stores the data onboard, and downloads to the designated DMC ground station at the first opportunity. Data is returned by the most appropriate route; either downloaded directly to the requesting ground station, or to the first available ground station with subsequent transfer by Internet.
DMC data scheduling: Each DMC Member operates its own satellite through its own ground station. Scheduling of images is carried out through the MPS (Mission Planning System) software. This manages the demand for images with constraints of power, data storage and other factors. Initially each Member used a single satellite MPS to task its own satellite. Coordination during this phase of operation was carried out through email and telephone communication. For example, if a disaster response was scheduled by the UK, then requests were communicated to the Members by email. They then scheduled their satellite accordingly.
The next phase of coordination is the installation of high bandwidth Internet links between DMC Member ground stations, and the operation of coordinated multi user MPS software. This enables any Member to plan and request data acquisition on all satellites in the DMC. The MPS polls each ground station to check the latest constraints on satellite and ground station use, before returning a list of imaging opportunities. The operator can then select some, or all, opportunities from the list, and these are then automatically submitted to each Member. Each Member operator currently confirms the requests manually before uploading the imaging schedule to the satellites. Future releases of the MPS software will have fully automated scheduling for some high priority classes of request - e.g. for disaster monitoring.
DMCii handles sales and marketing of DMC data. This pertains to all data observed outside the national boundaries of the DMC Members. DMCii uses the spare capacity of the constellation to generate income for the DMC members, and to support disaster response and management.
DMC partners are supplied with image processing software (Smart-i) that automates image product production upon download.
For commercial campaigns it is vital to have a clear commitment from the Members before undertaking an imaging contract. There is no obligation on Members to always participate in commercial campaigns and sometimes a satellite is fully occupied with a national mission (Ref. 6).
DMCii established formal processes to:
1) initiate campaign feasibility studies with the members and
2) to secure commitment from the members to participate in campaigns.
This ensures that the resources for each commercial campaign are known before it is contracted. DMCii advises the customer of any constraints and develops and agrees a solution for their specific needs.
• As of 2008, DMC has grown into a sustainable system which provides real benefits for its Members and generates a synergy between the satellites which is much greater than the sum of their individual contributions. It has enabled large coordinated imaging campaigns which would never otherwise have been feasible, and has opened up new applications in agriculture which had only previously been dreamed of.
• In October 2009, DMCii was invited to supply satellite imagery to the OGA USDA FAS (Office of Global Analysis, US Department of Agriculture, Foreign Agricultural Service) because it provides a unique combination of technical advantages for agricultural monitoring. 75)
- Firstly, its satellites provide 22 m and 32 m GSD (Ground Sample Distance) multispectral imagery with a large 650 km swath width that is capable of monitoring large areas rapidly.
- Secondly, the company is able to acquire daily images of a given location by coordinating the multi-satellite DMC constellation.
- Finally, multispectral image data is ideal for monitoring crop growth and is delivered in a highly calibrated Landsat-compatible format for immediate use in crop monitoring applications.
The imagery produced by the DMC satellites was initially used for international disaster monitoring and national campaigns by the satellite owners. Through DMC International Imaging Ltd. (DMCii), the DMC imagery was also exploited commercially in campaigns that needed large area coverage such as vegetation monitoring of the whole of Europe for ESA (European Space Agency) and yearly campaigns of the Amazon rainforest keeping an eye on illegal logging. 76)
These commercial campaigns generated significant revenue that flowed back to each of the satellite owners. In 2009 a further 2 SSTL-100 spacecraft, UK-DMC-2 and Deimos-1, were launched. These spacecraft are funded by projected data sales and are operated by the commercial companies Deimos Imaging S.L. and DMCii Ltd. Both spacecraft carry an improved Slim 6 Line Scan imager payload with a 22 m GSD (Ground Sampling Distance) and an order of magnitude more imagery throughput compared to the first generation DMC.
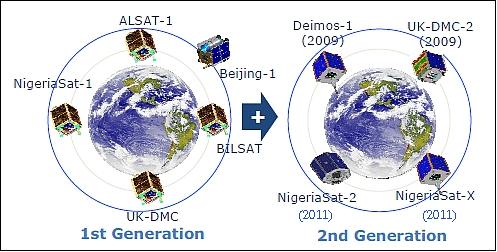
Legend to Figure 41: Of the 1st generation constellation, the spacecraft NigeriaSat-1, UK-DMC and Beijing-1 are operational in the fall of 2011. The BILSAT whose operations were terminated in August 2006 after nearly 3 years of service provision. The AlSat-1 operations were terminated in the summer of 2010. - Of the 2nd generation constellation, Deimos-1 and UK-DMC-2 are operational in 2011 while NigeriaSat-2 and NigeriaSat-X (both spacecraft were launched on August 17, 2011) are still in the commissioning phase as of October 2011.
International Charter: Space and Major Disasters
As of November 15, 2005, DMC joined the worlds major space agencies in adhering to the “International Charter: Space and Major Disasters.” This implies that both organizations, DMC and DMCii, will provide Emergency on Call Officer (ECO) services to the International Charter: Space & Major Disasters. 'The Charter' is a global effort by national space agencies and affiliated organizations to use Earth Observation (EO) satellites for disaster management. 77) 78)
The ECO is responsible for tasking all the EO Satellites available to the Charter during a disaster such as Fire, Flooding & Tsunami. It is currently planned that DMCii undertake final ECO qualification testing in November 2005, and upon completion become responsible for planning and tasking a global interagency satellite fleet that includes:
Landsat-5/7, SPOT-4/5, RADARSAT-1, Envisat, ResourceSat-1 (IRS-P6), SAC-C, NigeriaSat-1, AlSAT-1, BILSAT and UK-DMC. The DMC satellite constellation is to be represented within the Charter by BNSC (British National Space Center) and DMCii on behalf of the DMC Consortium members.
Following the UNISPACE III conference held in Vienna, Austria in July 1999, ESA (European Space Agency) and CNES (French Space Agency) initiated the International Charter "Space and Major Disasters", with the Canadian Space Agency (CSA) signing the Charter on 20 October 2000.
• The International Charter was declared formally operational on November 1, 2000
• NOAA (National Oceanic and Atmospheric Administration) of USA and ISRO (Indian Space Research Organization) joined in September 2001
• CONAE (Space Agency of Argentina) joined in July 2003
• JAXA (Japan Aerospace Exploration Agency) joined in February 2005
• USGS (United States Geological Survey) joined in 2005 as part of the US team
• BNSC (British National Space Center) and DMCii joined in November 2005
• CNSA (China National Space Administration) joined in May 2007
Via the Charter mechanism, all of these agencies have committed to provide free and unrestricted access to their space assets to support relief efforts in the immediate aftermath of a major disaster.
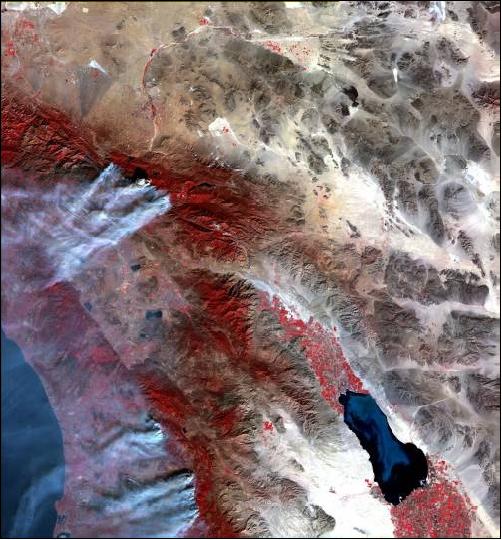
Haiti earthquake 2010: A major 7.0-magnitude earthquake struck the Haitian capital of Port-au-Prince on January 12, 2010, causing major casualties and damage. The quake was followed by several aftershocks with magnitudes over 5.0. Following the event, the French Civil Protection authorities, the Public Safety of Canada, the American Earthquake Hazards Program of USGS (united States Geological Service) and the UN Stabilization Mission in Haiti requested satellite data of the area from the International Charter on ‘Space and Major Disasters’ (simply referred to as 'The Charter').
Through the Charter, the international space community acquired satellite imagery as quickly as possible. The data were being collected by various satellites including Japan’s ALOS, CNES’s Spot-5, the U.S.’s WorldView and QuickBird, Canada’s RADARSAT-2 and ESA’s ERS-2 and Envisat.
Satellite imagery, acquired immediately after the event, were used to generate emergency maps to provide rescue services with an overview of the current state of the area. These were compared with situation maps generated from archived satellite data to identify major changes on the ground caused by the disaster.
Augmentation of the DMC Ground Segment
The current (2008) ground segment implementation employed by the DMC consortium makes use of a ground station, installed by SSTL, for each country owning a DMC satellite. These ground stations are all connected to the internet enabling interchange and sharing of commanding and data reception where required. These ground stations have the capability of commanding only their own country’s satellite although they may also be commanded by SSTL via the Guildford, UK ground station.
However, the DMC satellites do not have access to a network of ground stations with global coverage. With only one satellite passing over the imaging site of interest per day, it may be that the time lag between being able to command the satellite and taking the image could be ~ 5 hours.
Consequently, in the event of a disaster occurring, there is no guarantee that it will be possible to image the next time one of the DMC satellites passes overhead. 79)
SSTL is considering various augmentation options to improve the observation coverage of the DMC constellation in the event of a disaster. In particular, a quick command capability of the DMC spacecraft is needed to be able to react to disaster situation.
1) Use of polar ground stations:
One possible solution to this is to include a polar ground station. It is possible to place this at northern latitudes but due to the selection of a morning ascending node for the DMC mission, southern latitudes offer the greatest advantage for timely access to the satellites prior to an imaging pass. In this scenario, one of two Antarctic ground stations are being considered.
• McMurdo. US owned - on the southern tip of Ross Island at 77º51’ S, 166º 40’ E. The rationale behind selecting McMurdo is that it has an existing 10 m S/X-band antenna.
• Halley. UK owned – on the Brunt ice shelf at 75º 35’ S, 26º 34’ W.
The ground to satellite contact durations are 8 – 14 minutes long and occur every orbit which provides ample time to send commands and ensure that an image is taken over the area of interest.
2) Commanding via a GEO spacecraft:
The addition of an intersatellite link between a Low Earth Orbit Earth Observation (LEO EO) constellation and a spaceborne communications system can provide a large increase in total system capacity. This is achieved via inter-system command, telemetry and payload data links which can achieve the coverage and data throughput for the LEO EO system which would traditionally only be possible via an extensive and expensive ground segment network.
A possible solution could be one where the DMC constellation is augmented by a single Geostationary communications satellite to provide a ‘bent-pipe’ RF link between the LEO constellation and the ground (Figure 43). The additional functionality provided by the GEO payload would provide a significant increase in the responsiveness of the EO constellation at acceptable cost.
The future will show which scenario can be realized for a better service provision of the DMC constellation.
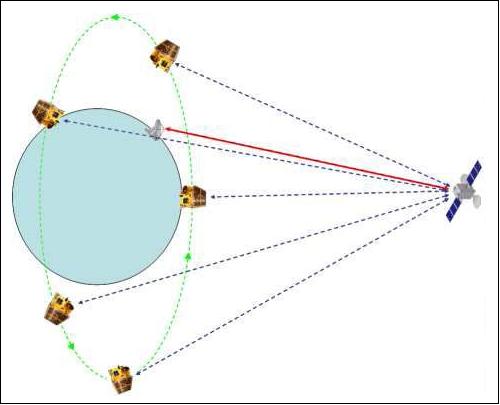
Mission | Imager type | Mission status | Launch date | Design life | Operational life | S/C Owner |
AlSat-1 | 32 m MS | Mission complete (summer 2010) | Nov. 28, 2002 | 5 years | 7 years | ASAL, Algeria |
BilSat-1 | 28 m MS | Mission complete (Aug. 2006) | Sept. 27, 2003 | 5 years | 3 years | TUBITAK, Turkey |
UK-DMC-1 | 32 m MS | Mission complete (Nov. 2011) | Sept. 27, 2003 | 5 years | 8 years | BNSC, UK |
NigeriaSat-1 | 32 m MS | Operational | Sept. 27, 2003 | 5 years | 8 years + | NASRDA, Nigeria |
Beijing-1 | 32 m MS | Operational | Oct. 27, 2005 | 5 years | 6 years + | MoST, China |
Deimos-1 | 22 m MS | Operational | July 29, 2009 | 5 years | 2 years + | Deimos Imaging SL, Spain |
UK-DMC-2 | 22 m MS | Operational | July 29, 2009 | 5 years | 2 years + | BNSC, UK |
NigeriaSat-X | 22 m MS | Operational | Aug. 17, 2011 | 5 years |
| NASRDA, Nigeria |
NigeriaSat-2 | 32 m MS | Operational | Aug. 17, 2011 | 7 years |
| NASRDA, Nigeria |
References
1) M. Sweeting, F. Chen, “Network of Low Cost Small Satellites for Monitoring & Mitigation of Natural Disasters,” Proceedings of the 47th International Astronautical Congress, Beijing, China, October 7-11, 1996, IAF-96-C.1.09
2) A. da Silva Curiel, L. Boland, M. Meerman, D. Liddle, M. Sweeting, “Real Time, Regional Imaging Constellation,” Third International Workshop on Satellite Constellations and Formation Flying, Pisa, Italy, Feb. 24-26, 2003, pp. 101-108
3) A. da Silva Curiel, P. Davies, S. Eves, L. Boland, M. Sweeting., “Rela-time MOSAIC - Rapid Response High-Resolution Imaging from Space,” 2nd Responsive Space Conference, April 19-22, 2004, Los Angeles, CA, USA
4) S. J. Jason, J. W. Ward, M. N. Sweeting, “Microsatellite Constellation for Disaster Monitoring”, Proceedings of the13th Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 23-26, 1999, SSC99-V-2,
5) Information provided by Audrey Nice of SSTL, Guildford, Surrey, UK - and by Lloyd Wood of Cisco, London, UK
6) Paul Stephens, Dave Hodgson, Steve Mackin, Gary Crowley, Owen Hawkins, “Growth and development of the DMC; New satellites and new members in the international constellation building a sustainable EO system,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.1.7
7) C. Underwood, S. Machin, P. Stephens, D. Hodgson, A. da Silva Curiel, M. Sweeting, “Evaluation of the Utility of the Disaster Monitoring Constellation in Support of Earth Observation Applications,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005, IAA-B5-1501
8) D. Gibbon, L. Boland, N. Bean, Y. Hashida, A. da Silva Curiel, M. Sweeting, P. Palmer, “Commissioning of a small satellite constellation - methods and lessons learned,” Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 9-12, 2004
9) D. Gibbon, A. Baker, I. Coxhill, M. Sweeting, “The Development of a Family of Resistojet Thruster Propulsion Systems for Small Spacecraft,” Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 11-14, 2003, SSC03-IV-8
10) P. Smith, R. McLellan, S. Edwards, D. Gibbon, “SmallSat Propulsion,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany
11) D. T. Schappell, E. Scarduffa, P. Smith, N. Solway, ”Advances in Marotta Electric and Satellite Propulsion Fluid Control Activities,” 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, July 10-13, 2005, Tucson, AZ, paper AIAA 2005-4055
12) D. Gibbon, C. Underwood, M. Sweeting, R. Amri, “ Cost effective propulsion systems for small satellites using butane propellant,” Acta Astronautica, Vol. 51, No 1, July 2002, pp. 145-152
13) "SSTL Low Power Resistojet," Surrey Satellite Technology LTD, URL: [web source no longer available]
14) A. Oussedik, M. Bekhti, M. N. Sweeting, W. Sun, “AlSAT-1: The first step into Space for Algeria,” Proceedings of the 53rd IAC and World Space Congress, Oct. 10-19, 2002, Houston, TX, IAC-02-UN/IAA.3 rd.01
15) A. Rachedi, N. Hadj-Sahraoui, A. Brewer, “AlSAT-1: First Results of Multispectral Imager,” Proceedings of ISPRS 2004, Istanbul, Turkey, July 12-13, 2004
16) M. Bekhti, M. Benmohamed, M. N. Sweeting, “The Role of Small, Cost Effective Spacecraft in the Developing Countries: The Algerian Experience,” Proceedings of the 4S Symposium: Small Satellites, Systems and Services, Sept. 20-24, 2004, La Rochelle, France
17) J. Cooksley, A. da Silva Curiel, P. Stephens, L. Boland, S. Jason, J. Northham, A. Brewer, J. Anzalchi, H. Newell, C. Underwood, S. Machin, M. Bekhti, Wei Sun, M. Sweeting, “AlSat-1 first year in orbit,” 54th IAC (International Astronautical Congress of the International Astronautical Federation), Bremen, Germany, Sept. 29-Oct. 3, 2003, IAC-03-B.1.09
18) Y. Bentoutou, M. Djaifri, A. M. Si-Mohammed, “Design implementation of a quasi-cyclic codec for random access memories on-board Alsat-1,” Acta Astronautica, Vol. 66, 2010, in press (article accepted Sept. 13, 2009)
19) A. da Silva Curiel, L. Boland, J. Cooksley, P. .Stephens, Wei Sun, M. Sweeting, “First Steps in the Disaster Monitoring Constellation,” 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Apr. 7-11, 2003
20) M. Bekhti, et al., “AlSAT-1: The first step into Space for Algeria,” Proceedings of the 53 rd IAC and World Space Congress, Houston, TX, Oct. 10-19, 2002
21) R. Wolstenholme, “Algeria’s first satellite mission completed,” SSTL space blog, Aug. 26, 2010, URL: https://web.archive.org/web/20120312233537/http://blog.sstl.co.uk/archives/321-Algerias-first-satellite-mission-completed.html
22) Andrew Carrel, Paul Alderton, “MEMS in Space – A New Technology Advancing from Flight Experiment to Proven COTS Product,” Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-XI-11
23) S. Gleason, M. Unwin, Y. Hashida, “Applying GPS to a Constellation of Disaster Monitoring Satellites,” ION-GPS 2002, Portland, OR, Sept. 24-27, 2002
24) S. Gleason, M. Adjrad, M. Unwin, Y. Hashida, “The Use of Spaceborne GPS on the Disaster Monitoring Constellation,” NAVITEC 2001, 1st Workshop on Satellite Navigation User Equipment Technologies, Dec. 10-12, 2001, ESA/ESTEC, Noordwijk, The Netherlands
25) V. J. Lappas, P. Oosthuizen, P. Madle, L. P. Cowie, G, Yuksel, D. Ferin, “Design, Analysis and In-orbit Performance of the BILSAT-1 Microsatellite Twin Control Moment Gyroscope Experimental Cluster,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-A.4.08
26) V. Lappas, P. Oosthuizen, P. Madle, L. Cowie, G. Yuksel, D. Fertin, “Micro CMGs for Agile Small Satellites: Design and In-Orbit Tests,” Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, Oct. 17-20, 2005 (ESA SP-606, Jan. 2006)
27) L. M. Gomes, G. Yuksel, V. Lappas, A. da Silva Curiel, A. Bradford, C. Ozkaptan, M. Sweeting, “BILSAT: Advancing Smallsat Capabilities,” AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 11-14, 2003
28) A. Bradford, G. Yuksel, L. M. Gomes, C. Ozkaptan, M. Sweeting, U. Orlu, “BILSAT-1: A Low-Cost, Agile, Earth Observation Microsatellite for Turkey,” Proceedings of 53rd IAC, Oct. 10-19, 2002, Houston, TX, IAC-02-IAA.11.3.02
29) U. M. Leloglu, G. Yuksel, M. N. Sweeting, “BILSAT-1: A Case Study For The Surrey Satellite Technology Ltd Know-How Transfer And Training Program,” Proceedings of 53rd IAC, Oct. 10-19, 2002, Houston, TX, IAC-02-P.1.01
30) V. J. Lappas, W. H. Steyn, C. I. Underwood, “Practical Results on the Development of a Control Moment Gyro Based Attitude Control System for Agile Small Satellites,” AIAA/USU Small Satellite Conference, Logan, Utah, August 12-15, 2002, URL: http://staff.ee.sun.ac.za/whsteyn/Papers/USU2002_CMG.pdf
31) U. Murat Legoglu, G. Yuksel, M. Sweeting, “BILSAT-1: A Case Study for the Surrey Satellite Technology Ltd Know-How Transfer and Training Program,” Proceedings of 53rd IAC, Oct. 10-19, 2002, Houston, TX, IAC-02-P-1.01
32) V. J. Lappas, “Control Techniques for Aerospace Systems,” May 7, 2003, URL: http://www.ae.metu.edu.tr/~ozan/control/cmgaero.pdf
33) P. Oosthuizen, S. Fellowes, C. Collingwood, S. Lalani, A. Cropp, S. Gleason, “Development and On-Orbit Results of the SSTL Low Cost Commercial Star Tracker,” AIAA Guidance, Navigation, and Control Conference and Exhibit, Aug. 21-24, 2006, Keystone, CO, USA, paper: AIAA 2006-6045
34) G. Yuksel, Ö. Belce, H. Urhan, L. Gomez, A. Bradford, N. Bean, A. da Silva Curiel, “BILSAT-1: First Year in Orbit-Operations and Lessons Learned,” Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 9-12, 2004, SSC04-IX-3
35) TÜBITAK-BILTEN Space Technologies Research Institute, URL: [web source no longer available]
36) "Turkish R&D Payloads," TÜBITAK-BILTEN Space Technologies Research Institute, URL: [web source no longer available]
37) O. ¿engül, U. M. Lelo¿lu, E.Tunal¿, M. S. K¿r¿k, N. ¿smailo¿lu, R. Sever, Erdem Ayvaz, “ÇOBAN: Design of Multi-Spectral Opto-Electronic Satellite Camera System,” Proceedings of the 3rd International Conference on Recent Advances in Space Technologies (RAST 2007), Istanbul, Turkey, June 14-16, 2007
38) N. Ismailoglu, O. Benderli, I. Korkmaz, M. Durna, T. Kolçak, Y. C. Tekmen, “A Real Time Image Processing Subsystem: GEZGIN,” AIAA/USU Small Satellite Conference, Logan, Utah, August 12-15, 2002, SSC02-VIII-3
39) "Turkish R&D Payloads," TÜBITAK-BILTEN Space Technologies Research Institute, URL: [web source no longer available]
40) “NigeriaSat-1 reaches end of long life,” SSTL, Oct. 29, 2012, URL: https://web.archive.org/web/20121110123455/http://www.sstl.co.uk/Blog/October-2012/NigeriaSat-1-reaches-end-of-long-life
41) Halilu Ahmad Shaba, “The Nigerian Space Program and Africa regional perspectives,” Proceedings of the 49 Session of UN COPUOS (Committee on the Peaceful Uses of Outer Space), STSC (Scientific and Technological Subcommittee), Vienna, Austria, Feb. 6-17, 2012, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2012/2012ind-03E.pdf
42) “UK-DMC-1 to take well-earned retirement,” SSTL, Nov. 25, 2011, URL: https://web.archive.org/web/20121107185710/http://www.sstl.co.uk/Blog
43) “SSTL satellite steps aside to reduce space junk,” Nov. 10, 2010, URL: https://www.sstl.co.uk/media-hub/latest-news/2010/sstl-satellite-steps-aside-to-reduce-space-junk
44) W. Ivanic, W. M. Eddy, L. Wood, D. Stewart, C. Jackson, J. Northam, A. da Silva Curiel, “Delay/Disruption-Tolerant Network Testing Using a LEO Satellite,” ESTC2008 (Earth Science Technology Conference 2008), June 24-26, 2008, College Park, MD, USA, URL: http://esto.nasa.gov/conferences/estc2008/papers/Ivancic_William_A4P2.pdf
45) Lloyd Wood, Will Ivancic Wesley M. Eddy, Dave Stewart, James Northam, Chris Jackson, Alex da Silva Curiel, “Use of the Delay-Tolerant Networking Bundle Protocol from Space,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B2.3.10
46) “Space-base DTN using a Commercially Operational Low Earth Orbiting Satellite,” IETF71 - IRTF DTNRG Meeting March 2008, URL: http://personal.ee.surrey.ac.uk/Personal/L.Wood/dtn/ivancic-ietf-71-dtnrg-UK-DMC-tests.pdf
47) M. J. Unwin, S. Gleason, M. Brennan. “The Space GPS Reflectometry Experiment On the UK Disaster Monitoring Constellation Satellite,” Proceedings of ION 2003. Portland, Oregon, September 2002, URL: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.120.896&rep=rep1&type=pdf
48) L. Boland, A. da Silva Curiel, M. Sweeting, P. Stephens, D. Hodgson, “Disaster Monitoring Constellation (DMC) - Success Based on Small Satellite Technologies,” Proceedings of the 19th AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 8-11, 2005, SSC05-IV-04
49) S. Gleason, S. Hodgart, S. Yiping, C. Gommenginger, S. Mackin, M. Adjrad, M. Unwin, ``Detection and Processing of Bistatically Reflected GPS Signals From Low Earth Orbit for the Purposes of Ocean Remote Sensing.” IEEE. Transactions on Geoscience and Remote. Sensing, Vol. 43, No. 6, pp. 1229 -1241, June 2005.
50) S. Gleason, M. Adjrad, ``An Attempt to Sense Ocean Winds and Waves Empirically Using Bistatic GNSS Reflections in Low Earth Orbit,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Seoul, Korea, July 25-29, 2005.
51) S. Gleason, A. da Silva Curiel, S. Makin, M. Sweeting, “A Global System for Detecting Dangerous Seas Using GNSS Bistatic Radar Technology,” Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B2.1.07
52) S. Gleason, M. Adjrad, M. J. Unwin,. “Sensing Ocean, Ice and Land Reflected Signals From Space: Results from the UK-DMC GPS Reflectometry Experiment,” Proceedings of ION GNSS 2005, Long Beach, CA, Sept. 13-16, 2005
53) S. Gleason, V. Zavorotny, “Bistatic Radar Cross Section Measurements of Ocean Scattered GPS Signals from Low Earth Orbit,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
54) S. Gleason, A. da Silva Curiel, Ka Bian, S. Mackin, “A Global System for Dangerous Sea Monitoring Using Space Based GPS Bistatic Remote Sensing,” Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-III-8
55) S. Gleason, “Land and Ice Sensing From Low Earth Orbit Using GNSS Bistatic Radar,” Proceedings of 19th ION GNSS 2006, Sept. 26-29, 2006, Fort Worth, TX, USA
56) D. M. Gibbon, “SSTL Experience in Small Spacecraft Micropropulsion,” Micropropulsion Workshop, CNES, Toulouse, Nov. 16-17, 2004
57) D. M. Gibbon, I. Coxhill, D. Nicolini, R. Correi, J. Page, “The Design, Development and In-Flight Operation of a Water Resistojet Micropropulsion System,” 40th AIAA Joint Propulsion Conference, Ft. Lauderdale, FLA, July 12-14, 2004, AIAA-2004-3797
58) L. Wood, W. Ivancic, D. Stewart, J. Northam, C. Jackson, A. da Silva Curiel, “IPv6 and IPsec on a satellite in space,” 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B2.6.06
59) L. Wood, “CLEO Cisco router in Low Earth Orbit,” April 2, 2007, URL: http://personal.ee.surrey.ac.uk/Personal/L.Wood/cleo/cleo-vmoc-overview-notes-only.pdf
60) L. Wood, A. da Silva Curiel, W. Ivancic, D. Hodgson, D. Shell, C. Jackson, D. H. Stewart, “Operating a terrestrial Internet router onboard and alongside a small satellite,” Proceedings of the 56 IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B5.3./B5.5.03
61) L. Wood, D. Shell, W. Ivancic, B. Conner, E. Miller, D. Stewart, D. Hodgson, “CLEO and VMOC: Enabling Warfighters to task Space Payloads,” IEEE MILCOM 2005, Atlantic City, New Jersey, October 17-20, 2005, URL: http://www.ee.surrey.ac.uk/Personal/L.Wood/publications/wood-milcom-2005-unclass-paper.pdf
62) L. Wood, W. Ivancic, A. da Silva Curiel, C. Jackson, D. Stewart, D. Hodgson, “Adopting Internet standards for orbital use,” Proceedings of the 19th AIAA/USU Conference on Small Satellites, Logan, UT, SSC05-IV-03
63) W. Ivanic, W. M. Eddy, L. Wood, D. Stewart, C. Jackson, J. Northam, A. da Silva Curiel, “Delay/Disruption-Tolerant Network Testing Using a LEO Satellite,” ESTC2008 (Earth Science Technology Conference 2008), June 24-26, 2008, College Park, MD, USA, URL: http://esto.nasa.gov/conferences/estc2008/papers/Ivancic_William_A4P2.pdf
64) Lloyd Wood, Will Ivancic Wesley M. Eddy, Dave Stewart, James Northam, Chris Jackson, Alex da Silva Curiel, “Use of the Delay-Tolerant Networking Bundle Protocol from Space,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B2.3.10
65) Lloyd Wood, Charles Smith, Wesley M. Eddy, Will Ivancic, Chris Jackson, “Taking Saratoga from Space-Based Ground Sensors to Ground-Based Space Sensors,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
66) A. da Silva Curiel, L. Gomes, K. Morgan, T. Butlin, J. Harding, J. Cooksley, L. Boland, M. Sweeting, “Small Satellite Constellations for Earth Observation,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.4.08
67) A. M. Baker, P. Davies, M. Sweeting, “DMC+: High Performance Small Spacecraft Based Earth Observation at an Affordable Cost,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-IAF-B1.2.06
68) G. S. Aglietti, L. Gomes, A. da Silva Curiel, “Hard disk drives for spacecraft application,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.6.02
69) G. S. Aglietti, L. Gomes, A. da Silva Curiel, “Hard disk drives for spacecraft application,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.6.02
70) A. da Silva Curiel, L. Gomes, D. Purl, D. Hodgson, M. Sweeting, “Fiirst Year In Orbit - Results from the Beijing-1 Operational High Resolution Small Satellite,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
71) D. Purll, L. Gomes, A. da Silva Curiel, M. Cutter, Wei Sun, M. Sweeting, “An Advanced High Resolution Optical Sensor for Small Satellite Mapping Missions,” Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-X-3
72) A. da Silva Curiel, L. Gomes, J. Harding, S. Eves, D. Purll, M. Cutter, Wei Sun, M. Sweeting, “Small Satellites for Real Operational Missions in Earth Observation,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.3.01
73) J. P. Stephens, M. Sweeting, “Developing a Commercial Interface for DMC Data,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAA.4.B.5
74) D. Hodgson, L. Boland, S.; Mackin, P. Palmer, Y. Hashida, N. Bean, A.; Brewer, H. Kadhem, C. Jackson, P. Davies, A. da Silva Curiel, M. Sweeting, “Earth Observation Constellations with Automated Image Delivery,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.1.05
75) “DMCii satellite imagery approved by US Department of Agriculture,” DMCii, Oct. 27, 2009, URL: http://www.technologynewsroom.com/press_releases/company_releases.aspx?story=1474
76) Mike A. Cutter, Luis Gomes, Alex da Silva Curiel, Philip E. Davies, Zeger de Groot, Liam R. Sills, Andrew Cawthrorne, Martin N. Sweeting, “A New Generation of Disaster Monitoring Constellation Imagers,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.B1.3.2
77) http://www.disasterscharter.org/home
78) “Brochure of The Charter,” URL: http://www.disasterscharter.org/c/document_library/get_file?folderId=33636&name=DLFE-2502.pdf
79) Douglas Liddle, Kathryn O’Donnell, Philip Whittaker, Susan Jason, “Combining Small Satellites across Applications and Orbits,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B4.4.A9
80) Gary Crowley, “DMC Missions and Ground Segment,” 3rd GSCB (Ground Segment Coordination Body) Workshop, 2012, ESA/ESRIN, Frascati, Italy, June 6-7, 2012, URL: http://earth.esa.int/gscb/papers/2012/19-DMC_missions_and_ground_segment.pdf