DTUSat - 2 (Danish Technical University Satellite-2)
EO
Land
Multi-purpose imagery (land)
Land surface imagery
Danmarks Tekniske Universitet Satellite 2 (DTUSAT-2) is a satellite that is used to track birds from space. It uses ground based transponders that are used during migration.
As of 2024, it is no longer operational in its primary role but still transmits beacons.
Quick facts
Overview
| Mission type | EO |
| Agency | Technical University of Denmark |
| Mission status | Operational (extended) |
| Launch date | 19 Jun 2014 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land) |
| Measurement detailed | Land surface imagery |
| Instruments | CCD |
| Instrument type | Other, Data collection |
| CEOS EO Handbook | See DTUSat - 2 (Danish Technical University Satellite-2) summary |
DTUSat-2 (Danish Technical University Satellite-2)
DTUSat-2 is a picosatellite project of the National Space Institute at the Technical University of Denmark, Lyngby, Denmark. The project was initiated with a nationwide call for proposals leading up to a payload selection conference in November 2005. The title of the selected proposal was: “Solving the mystery of bird migration: Tracking small birds from space” which aims to implement a spaceborne radio-tracking system capable of locating small birds on intercontinental migration routes. The experiment specifically targets nidifugous Cuckoos (cuculus canorus) with the purpose of expounding the navigational mechanisms employed by these birds to complete intercontinental migrations over thousands of kilometers without guidance from parents or experienced conspecifics. 1) 2) 3) 4) 5) 6)
The project consists of four parts:
1) To design the system
2) To construct the satellite as well as the GPPL (Ground Primary Payload) transmitter system, which will be the tasks for students at DTU.
3) Making the system work on a number of test cases including using the system on real migratory birds; this will be done in collaboration between DTU and a team of biologists lead from the Zoological Museum, who will undertake the actual fitting of the transmitters to the birds. Biology students are expected to take part in this work, but additionally, the Zoological Museum collaborates with a number of volunteers to capture and ring the birds.
4) To perform a displacement experiment, in which a number of birds are physically moved to a location to the far east of Denmark, whilst carrying the bird transmitters; this will be undertaken by a team from the Zoological Museum.

The GPPL tracking system being developed by students and educators at DTU Space comprises a miniature radio-transmitter to be mounted on the carrier birds, prior to the migration, and the DTUSat-2 satellite carrying a purpose-built receiver system to complement the bird transmitters. The envisioned system will provide GPS position data for individual bird transmitters and hence yield unparalleled accuracy as compared to contemporary systems. Moreover, the transmitter design will be extremely compact (10 mm x 10 mm x 30 mm) and light weight (< 5 g), thus allowing the DTUSat-2 tracking system to be operable with the vast number of smaller species, otherwise incompatible with the physical outline of currently available transmitter systems.
Background on the DTUSat program: The DTUSat-1 CubeSat was launched successfully by a Rokot-KM vehicle on June 30, 2003 with the objective to track migratory birds. However, the project could not establish any contact with the satellite, the exact reason for this remains unclear. The project used several different ground stations over a period of 6 months.
Spacecraft
The DTUSat-2 design adheres to the standard 1U CubeSat concept featuring a maximum mass of 1 kg and a physical envelope during launch of only 100 mm x 100 mm x 113.5 mm. A modular structural design is employed for all subsystems.
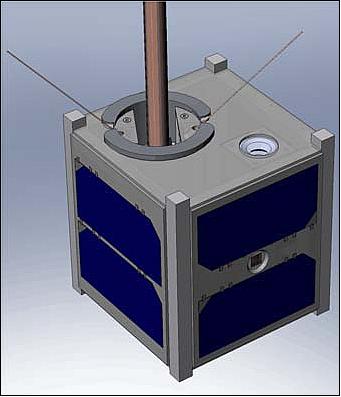
ACS (Attitude Control Subsystem): The ACS comprises a number of available attitude sensor systems including a custom built, four axis (one hot redundant), science grade, AMR (Anisotropic Magnetoresistive) magnetometer, a two axis sun sensor, an infrared coarse attitude sensor, and the PicoCam imaging system for offline stellar reference sensing. The AMR magnetometer constitutes the primary attitude sensor, and is capable of delivering 3-DOF attitude data with an accuracy of ±0.5º. Similarly the sun sensor is capable of determining the sun pointing vector for one face of the satellite with an accuracy of ±1º. Finally, the infrared coarse attitude sensor is used as a simple up/down indicator to determine if the satellite is correctly oriented prior to deploying the passive attitude stabilization.
Attitude actuation is provided by a nominally nadir-pointing gravity gradient boom of 1.4 m in length and a tip mass of 40 g. In addition, a 3-axis magnetorquer is providing liberation damping in the event that the gravity gradient boom deployment erroneously causes the patch antennas to settle in zenith pointing attitude. The nadir-pointing boom concept is needed for all spacecraft communications with the ground. - Moreover, the magnetorquer design also allows full 3-axis attitude control experimentation to be performed, a technique which will be demonstrated in the early phases of the mission prior to deployment of the gravity gradient boom.

COM (RF Communication Subsystem): COM is designed as a full duplex stand-alone module operating with an L-band uplink (1268.900 MHz) and an S-band downlink (2401.835 MHz) at 220 mW output power. The uplink data rate is at 9.6 kbit/s in CPFSK modulation; the downlink rates are at 1.2 kbit/s, 19.2 kit/ps, or at 38.4 kit/ps in MSK modulation to support multiple operating scenarios. A 30 bit/s OOK (On-OFF-Keying) beacon is transmitted at 30 s intervals with an output power of 220 mW. This feature is only disabled when performing downlink sessions with the DTU ground stations.
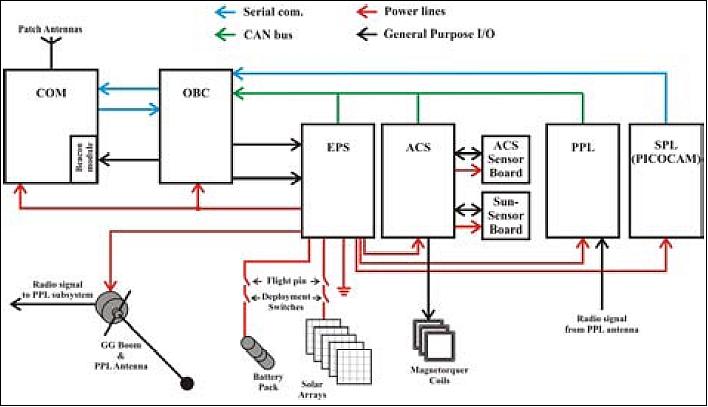
EPS (Electrical Power Subsystem): The high-efficiency system features five individual branches (two permanently active, three switchable) with 3.3V regulated voltage, and is capable of sustaining combined loads up to 3A. The EPS is connected to a primary power source consisting of 8 Emcore ATJ (Advanced Triple Junction) solar cells (27.5% efficiency) positioned on four of the satellites six outer faces. Secondary power is supplied by two prismatic Li-Ion batteries, each with 1100 mAh capacity.
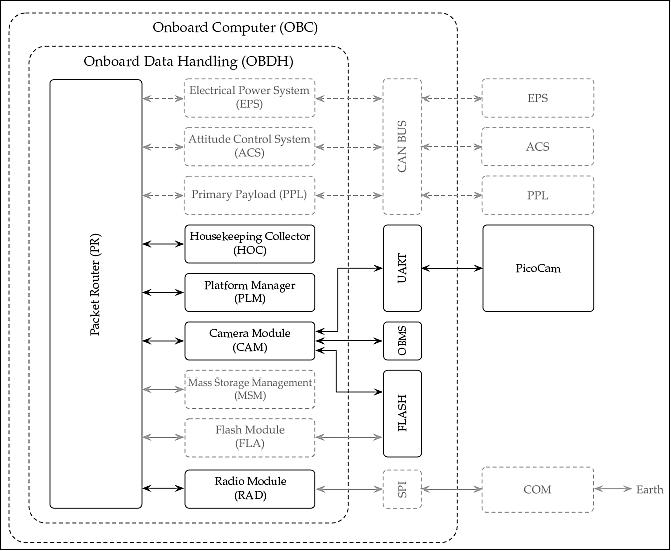
OBC (Onboard Computer) and OBDH (Onboard Data Handling subsystem): The subsystem is based on the ARM7 core embedded in a Philips LPC2292 processor running at 14.7456 MHz. The power consumption is < 100 mW for all operating modes. The system uses the CAN (Controller Area Network) bus for all applications.
For data storage, the OBC features a flash chip which has been tested thoroughly to determine its behavior in space. However this flash chip has very limited storage capacity. As a supplement to the flash chip, a standard memory card of the MicroSD type has been fitted to the main circuit board of the OBC. A microSD memory card can be considered a mass storage device. The behavior of this memory card in space is unknown. To enable experiments with its robustness, OBDH must be able to communicate with it.
Note: MicroSD is a format for removable flash memory cards. SD is an acronym for Secure Digital. The microSD format was originally created by SanDisk. It was originally called T-Flash, and then TransFlash, before being renamed microSD when adopted by the SDA (SD Card Association).
Launch
The DTUSat-2 CubeSat was launched as a secondary payload on June 19, 2014 (19:11:11 UTC) on a Dnepr-1 vehicle of ISC Kosmotras. The launch site was the Yasny Cosmodrome in the Dombarovsky region of Russia. 7) 8) 9) 10)
The primary payloads on this flight were the Deimos-2 minisatellite (310 kg) of Deimos Elecnor, Spain, and the KazEOSat-2 minisatellite (185 kg) of Kazcosmos, Kazakhstan.
The secondary payloads (35) on this Dnepr cluster mission were:
• UNISat-6, a microsatellite of GAUSS at the University of Rome (La Sapienza), Italy. UniSat-6 (26 kg) includes Pico-Orbital Deployers and PEPPODs (Planted Elementary Platform for Picosatellite Orbital Deployment) systems for the release of four CubeSats from the spacecraft. These four satellites are:
- Lemur-1, a 3U CubeSat (technology demonstration and EO) of NanoSatisfi Inc., San Francisco, CA, USA
- TigriSat, a 3U CubeSat of the University of Rome (La Sapienza), Rome, Italy.
- ANTELSAT, a 2U CubeSat of UdelaR (University of the Republic), San Marino, Uruguay
- AeroCube-6, a 1U CubeSat of The Aerospace Corporation, El Segundo, CA.
• SaudiSat-4 a microsatellite (112 kg) of KACST (King Abdulaziz City for Science and Technology) with input from NASA/ARC.
• AprizeSat-9 and -10, nanosatellites (each of 12 kg) of SpaceQuest, USA. AprizeSat-10 carries an AIS (Automatic Identification System) receiver for ship tracking.
• Hodoyoshi-3 and -4, microsatellites (60 kg and 65 kg, respectively) of the University of Tokyo and of JAXA/ISAS, Japan
• BRITE-CA-1 and BRITE-CA-2, two nanosatellites (7 kg each) of UTIAS/SFL (University of Toronto, Institute for Aerospace Studies), Toronto, Canada
• TabletSat-Aurora, a microsatellite (25 kg) of SPUTNIX, Russia
• BugSat-1, a microsatellite (22 kg) of Satellogic S.A., Argentina
• Perseus-M1 and M2, two identical 6U CubeSats of Canopus Systems US / Dauria Aerospace. The nanosatellites are carrying an AIS payload for ship tracking.
• QB50P1 and QB50P2, two 2U CubeSats (2 kg each) of Von Karman Institute, Brussels, Belgium. These are two precursor satellites to the QB50 project that will launch a network of 50 satellites by a team of 15 universities and institutions around the world.
• NanoSatC-Br1, a 1U CubeSat of the Southern Regional Space Research Center and of INPE, Brazil
• DTUSat-2, a 1U CubeSat of DTU (Technical University of Denmark), Lyngby, Denmark
• POPSat-HIP-1, a 3U CubeSat of Microspace Rapid Pte Ltd., Singapore
• PolyITAN-1 of KPI (Kiev Polytechnic Institute), Kiev, Ukraine
• PACE (Platform for Attitude Control Experiments), a 2U CubeSat (2 kg) of NCKU (National Cheng Kung University), Tainan City, Taiwan
• Duchifat-1, a 1U CubeSat of HSC (Herzliya Science Center), Israel
• 11 Flock-1c nanosatellites (eleven 3U CubeSats, 5 kg each) of Planet Labs, San Francisco, CA.
Orbit: Sun-synchronous orbit, nominal altitude of 630 km, inclination = 98º, LTAN (Local Time of Ascending Node) of 10:30 hours.
Mission Status
• May 5, 2019: DTUsat-2 It is no longer operational in its primary role but still transmits beacons.
After an investigation, it was determined that the DTUSAT-2 onboard battery had been destroyed as a consequence of two errors in the satellite. Four resistors in the power system battery protective circuitry had wrong values, resulting in too low limit values of the battery charging cycle. The passive attitude system was optimised for antenna directivity, resulting in low power generation during passage over northern Africa. In combination, this resulted in deep discharge of the battery with no possibility of recovery, leading to the battery suffering permanent damage.
Once the battery had been discharged, the 3.3 V power bus voltage was not stabilised. Hence, when resetting occurred either due to eclipse or magnetically induced attitude changes, the Onboard Computer (OBC) booting sequence may have failed due to voltage fluctuations of the 3.3 V power bus. A failed OBC boot led to extra power expenditure as the OBC beacon vacancies were filled with the longer RF Communication Subsystem (COM) beacon making it even harder for the battery to recover.
The attitude system based on a permanent magnet was oriented for optimization of the RF link during a ground station pass and not power generation. With no power
storage facility, the operation of DTUsat-2 was governed by variations in inclination and declination of Earth’s magnetic field. 12)
• June 19, 2014: The DTUSat-2 CubeSat was launched as a secondary payload at 19:11:11 UTC, on a Dnepr-1 vehicle of ISC Kosmotras. The launch site was the Yasny Cosmodrome in the Dombarovsky region of Russia.
• November 18, 2011: DTUsat-2 is the next (DTU) student satellite expected to be launched in 2012/2013. 14)
Sensor Complement (GPPL/PPL, PicoCam, Sun sensor)
The aim of the DTUSat-2 mission is to construct a satellite-based radio-tracking system capable of locating small birds on intercontinental migration anywhere along the route. The DTUSat-2 primary payload consists of two segments: 11)
1) A ground segment, called GPPL (Ground Primary Payload), to be strapped onto the back of cuckoo birds. The GPPL will transmit regular radio signals to DTUsat-2 as it passes over the cuckoo bird.
2) A space segment, called PPL (Primary Payload). The transmitted signals are received by the PPL radio module on board DTUsat. The transmitted signals contains GPS position data. All PPL data are transmitted to the ground station and will be used to determine the migratory route of the cuckoo bird.
GPPL (Ground Primary Payload) Transmitter
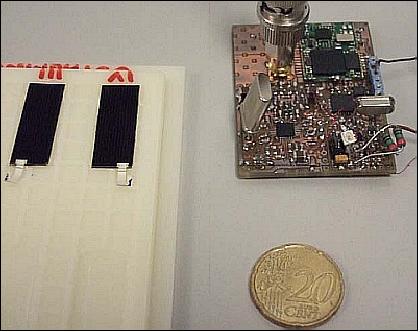
The GPPL transmitter system represents a major leap forward in terms of intercontinental miniature tracking technology. The GPPL system design combines numerous novel techniques towards system level miniaturization and power optimization in implementing the different segments of the design as illustrated in Figure 6.
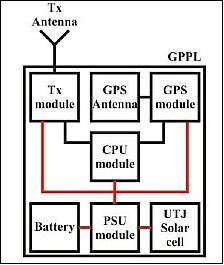
The GPPL power subsystem incorporates a customized power supply with a miniature 30 mm2 ultra triple junction solar cell (27.5% efficiency) and a novel battery charging circuit to ensure sufficient power levels throughout the migration period.
The CPU module features a small, extremely low power 16 bit processor capable of performing a full orbit propagation to determine the exact time when an uplink transmission to the DTUSat-2 satellite can be performed. This calculation is based upon the time and position fixes acquired by the miniature GPS receiver system.
Depending on an opportune moment where the battery has sufficient power levels and the satellite is in view for a sufficiently long period of time, the GPPL system will initiate a high power transmission to the satellite using the BPSK transmitter module at 30 bit/s, delivering the 5 latest position fixes to the satellite.
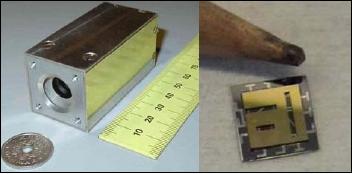
GPPL Version 3
It took 3 attempts to reach a design that meets the requirements:
- Maximum mass less than 5 g
- Maximum size 10 x 10 x 30 mm3 (excluding the antenna)
- GPS capability
- Maximum transmission distance 2300 km.
When DTUSat-2 is in view, GPPL will activate the BPSK transmitter and start transmitting data at 30 bit/s containing the last five position fixes that were stored onboard the sensor.
PPL (Primary Payload) Receiver
The objective of PPL is to recover the GPPL transmissions. The PPL is implemented as a self-contained 868 MHz receiver system with a strong digital processing backend that eventually delivers the recovered data to storage on the OBC through the satellite CAN bus. The transmission from the GPPL transmitters to PPL occurs at very low data rates via a BPSK modulated signal using spread spectrum techniques ( transmission of small data packets that allow the identification of the bird and its position). The PPL system receives the signal through a dedicated dipole antenna collocated with the gravity gradient boom on the +Z panel of the satellite as illustrated in Figure 2.
PicoCam (Pico Camera)
PicoCam was designed and developed by students of DTU. PicoCam is a tiny CCD imaging system, developed at DTU, specifically optimized for deployment on small satellites with limited power production capabilities. The CCD detector has a resolution of 640 x 480 pixels in 8 bit gray scale. Notable is the fact, that the CCD utilizes a Bayer filter, making restoration of colors possible. It also holds a chip for compressing images.
PicoCam is used to monitor the deployment event of the gravity gradient boom; it is also being used as an offline stellar reference attitude sensor in cross calibration experiments with the sun sensor and the AMR magnetometer.
Sun sensor:
The sun sensor is of DTUSat-1 heritage. The tiny 2nd generation sun sensor features a MOEMS (Micro-Opto-Electro-Mechanical-System) design. The device provides angular accuracies of < 1º. PicoCam and the sun sensor are considered secondary payloads on DTUSat-2.
References
2) Kasper Thorup, “Solving the mystery of bird migration: Tracking small birds from space,” URL: https://web.archive.org/web/20070611111748/http://dtusat.dtu.dk/fileadmin/docs/payload/Bird_proposal.pdf
3) “Solving the Mystery of Bird Migration: Tracking Small Birds from Space,” DTUSat Mission Definition Document, April 20, 2007, URL: https://web.archive.org/web/20070611113349/http://www.dtusat.dtu.dk/fileadmin/docs/DTUsat_MDD_1_21.pdf
4) Jonas B. Bjarnø, René W. Fléron, “The next generation animal migration research platform,” Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
5) Jonas B. Bjarnø, René W. Fléron, “DTUSat-2 - The Next Generation Animal Migration Research Platform”, Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
6) “Solving the Mystery of Bird Migration: Tracking Small Birds from Space,” Mission Definition Document, April 20, 2007, URL: https://web.archive.org/web/20070611113349/http://www.dtusat.dtu.dk/fileadmin/docs/DTUsat_MDD_1_21.pdf
7) Patrick Blau, “Dnepr Rocket successfully Launches Cluster of 37 Satellites,” Spaceflight 101, June 19, 2014, URL: http://www.spaceflight101.com/dnepr-launch-updates---2014-cluster-launch.html
8) William Graham, “Russian Dnepr rocket lofts record haul of 37 satellites,” NASA Spaceflight.com, June 19, 2014, URL: http://www.nasaspaceflight.com/2014/06/russian-dnepr-rocket-record-launch-37-satellites/
10) Information provided by René Fléron of DTU (Technical University of Denmark), Lyngby, Denmark.
11) “Primary Payload,” URL: https://web.archive.org/web/20200815190840/http://www.dtusat.dtu.dk/index.php?id=29
12) Fleron, R. W., “Satellite Forensics: Analysing Sparse Beacon Data to Reveal the Fate of DTUsat-2”, International Journal of Aerospace Engineering, May 5, 2019, [8428167], URL: https://doi.org/10.1155/2019/8428167
13) SatNogs DB, “DTUSAT-2 (40030)”, URL: https://db.satnogs.org/satellite/40030
14) DTU, “Project No. 0050: Test Environment for DTUsat-2, November 18, 2011, URL: https://www2.imm.dtu.dk/courses/02125/0050.html