EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) and OMOTENASHI
EO
JAXA
Operational (nominal)
EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) and OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) are microsatellites developed by JAXA (Japan Aerospace Exploration Agency) and the University of Tokyo. The satellites were launched in November 2022, onboard Artemis-1. EQUULEUS aims to aid the understanding of plasma distribution around Earth from Earth-Moon Lagrange point L2 (EML2). OMOTENASHI aimed to demonstrate technology for deployment of a lunar nano-lander.
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA |
| Mission status | Operational (nominal) |
| Launch date | 16 Nov 2022 |
| CEOS EO Handbook | See EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) and OMOTENASHI summary |
Summary
Mission Capabilities
PHOENIX (Plasmaspheric Helium ion Observation by Enhanced New Imager in eXtreme ultraviolet), CLOTH (Cis-Lunar Object detector within THermal insulation) and DELPHINUS (DEtection camera for Lunar impact PHenomena IN 6U Spacecraft) are the instruments onboard EQUULEUS.
PHOENIX will image the entire Earth’s plasmasphere in the Extreme Ultraviolet (EUV) wavelength range, from EML2. CLOTH is a dust detector in a multilayered thermal insulator (MLI), with the objective to measure the meteoroid impact flux in the cislunar region. DELPHINUS is a telescope system which will measure the Lunar impact flashes from EML2. The combination of DELPHINUS and CLOTH data will aid the understanding of the spatial distribution and temporal variation of objects in the cislunar region.
Perfomance Specifications
PHOENIX telescope has a focal length of 0.07 m with an FOV angle of 11.9° x 11.9° and spatial resolution of 0.085°. CLOTH has a total sensitive area of 0.04m² and can detect dust size up to 4 µm at speeds greater than 10 km/s. DELPHINUS can image within the wavelength band of 400 to 800 nm. DELPHINUS telescopes have a resolution of 7.4 µm x 7.4 µm (659 x 494 pixels), a focal length of 0.5m and an F-Stop of 1.4. The images can be taken at a maximum of 1/60 seconds of exposure, of objects with 4.5 visual magnitude.
EQUULEUS will initially be in lunar flyby trajectory, eventually transferring to a libration orbit around the Lagrange point 2.
OMOTENASHI was launched into a heliocentric orbit, aiming to land on the moon six days after detachment from the ARTEMIS payload. It contained a radiation monitor and an accelerometer.
Space and Hardware Components
Both satellites were of 6U CubeSat factor, measuring 10 cm x 20 cm x 30 cm and weighing 14 kg each.
EQUULEUS has a two-year mission life. During this time, it will demonstrate low-energy trajectory control techniques with multiple lunar flybys. It will then transfer into the EML2 libration orbit.
The last contact with OMOTENASHI was on the 17th of November, 2022. JAXA reported on the 22nd of November that the recovery attempts had been abandoned. A possible cause of failure was the solar panels being unable to point towards the sun.
EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) and OMOTENASHI
EQUULEUS OMOTENASHI References
EQUULEUS, a deep-space 6U CubeSat mission, jointly proposed by JAXA (Japan Aerospace Exploration Agency) and the University of Tokyo to NASA, was selected as a secondary payload of the first flight of NASA’s new SLS (Space Launch System) EM-1 mission. The spacecraft will be injected into a lunar flyby trajectory by the launch vehicle. The EQUULEUS project plans to demonstrate low-energy trajectory control techniques within the Earth-Moon region at EML2 (Earth—Moon L2 Lagrangian point 2), using a new water propulsion system with low thrust and little propellant, and to conduct scientific observations such as imaging Earth’s plasmasphere. 1) 2)
NASA offered three CubeSat launch opportunities on EM-1 to international partners. Japan is providing two 6U CubeSats, EQUULEUS and the OMOTENASHI (Outstanding Moon Exploration Technologies Demonstrated by Nano Semi-Hard Impactor) whose size is about 10 x 20 x 30 cm with the mass of each CubeSat is limited to 14 kg. EQUULEUS will help scientists understand the radiation environment in the region of space around Earth by imaging Earth’s plasmasphere and measuring the distribution of plasma that surrounds the planet. This opportunity may provide important insight for protecting both humans and electronics from radiation damage during long space journeys. It will also demonstrate low-energy trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon region. 3) 4)
EQUULEUS Mission
EQUULEUS is one of 13 cubesats planned to be carried with the Orion EM1 mission into a heliocentric orbit in cis-lunar space on the maiden flight of the SLS (Block 1) iCPS launch vehicle in 2020.
EQUULEUS will help scientists understand the radiation environment in the region of space around Earth by imaging Earth’s plasmasphere and measuring the distribution of plasma that surrounds the planet. This opportunity may provide important insight for protecting both humans and electronics from radiation damage during long space journeys. It will also demonstrate low-energy trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon region.
Overview
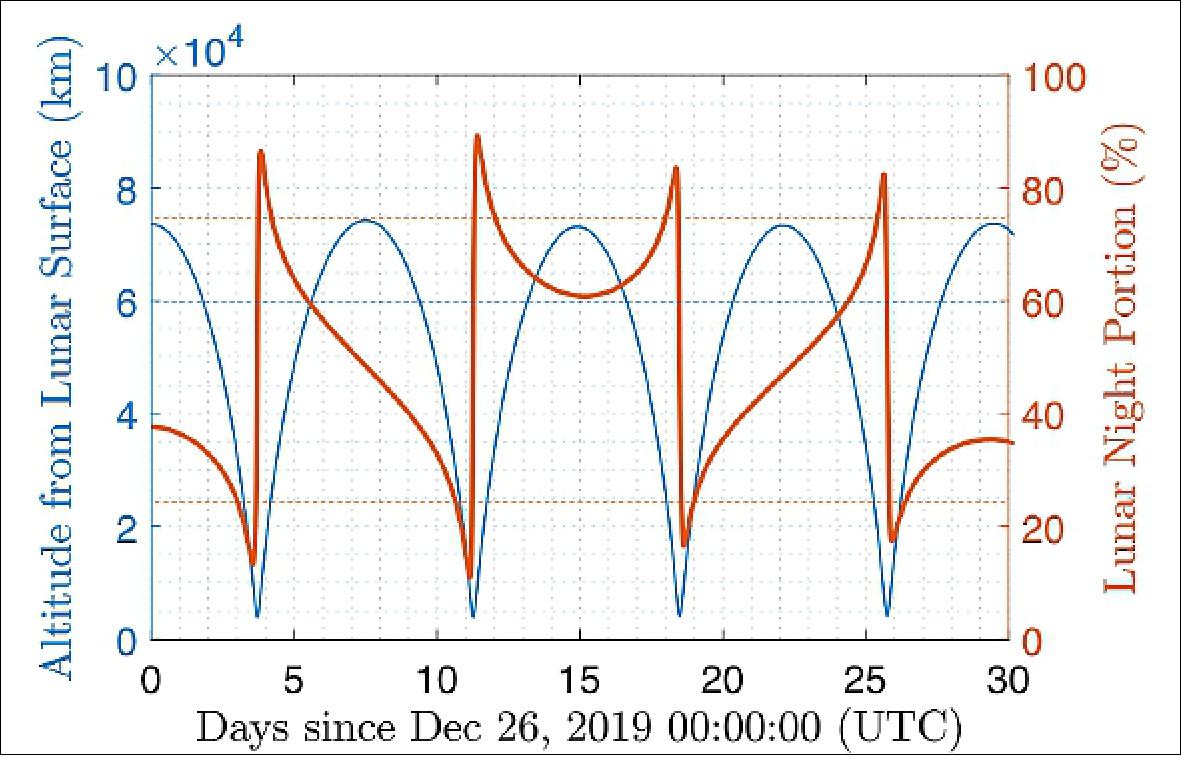
The primary objective of the EQUULEUS mission is the demonstration of the trajectory control techniques within the Sun-Earth-Moon region (e.g. low-energytransfers using weak stability regions) for the first time by a nano-spacecraft. For this purpose, the spacecraft will fly to a libration orbit around the EML2 (Earth—Moon L2) Lagrangian point by using multiple LGAs (Lunar Gravity Assists). Figure 2 shows the current baseline trajectory, which includes three deterministic TCMs (Trajectory Correction Maneuvers) and three LGAs. 5) 6)
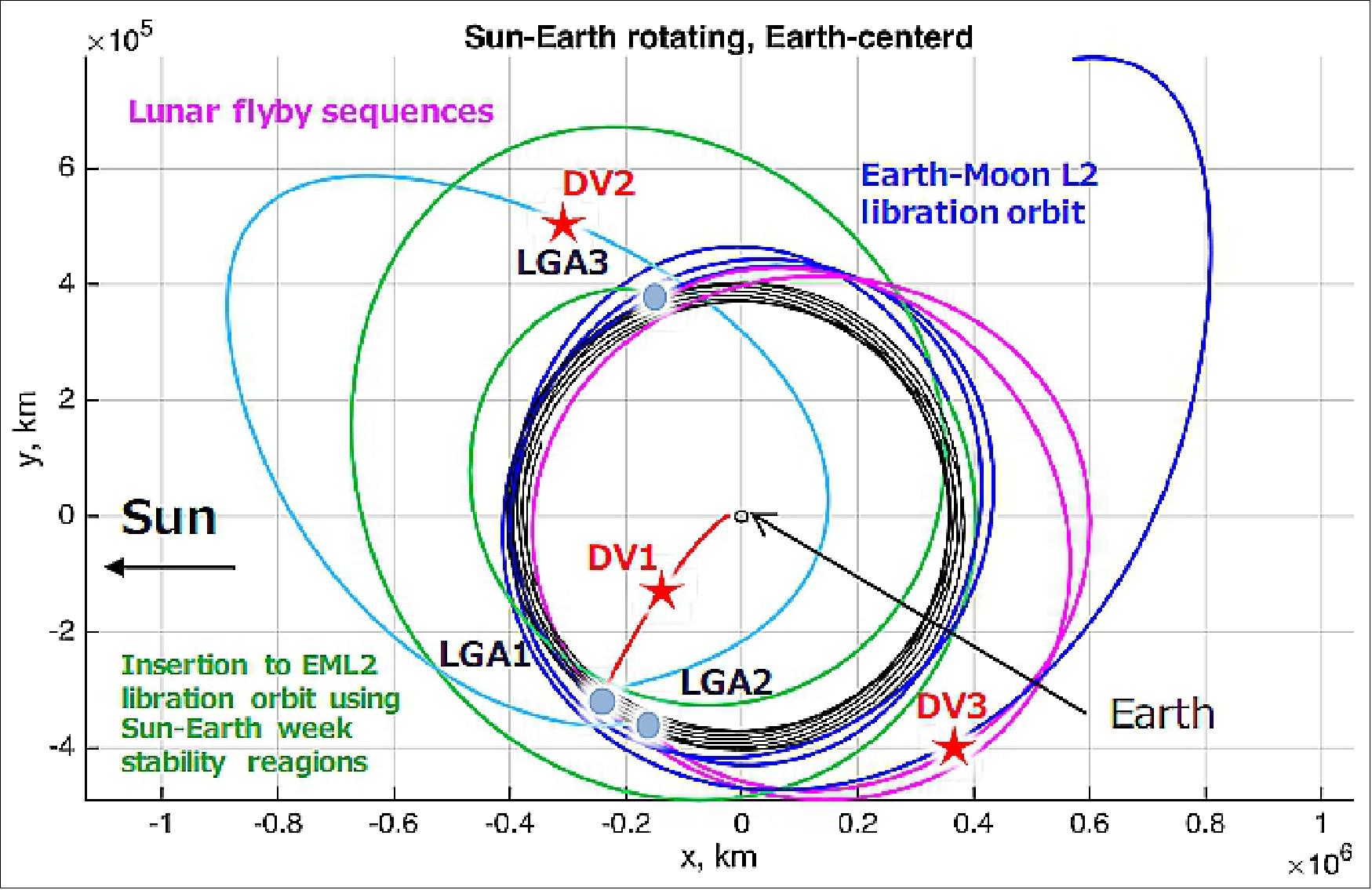
After deployment into a lunar flyby trajectory, EQUULEUS will perform a deterministic TCM of 10-20 m/s to increase the perilune altitude and target an Earth-bound, Moonreturn trajectory. The first LGA occurs about a week after launch, then a sequence of lunar flybys is used to enable a low-energy transfer to an EML2 libration orbit. The sequence of lunar flybys can last several months and include one to four additional LGAs. At the end of this sequence, the spacecraft reaches the EML2 libration orbit. Finally, after completing the observation mission at EML2, the spacecraft leaves the Earth system on an escape orbit shortly before the completion of the onboard propellant. This engineering mission will demonstrate part of the future scenario of the utilization of the deep space port around the moon and its Lagrange points.
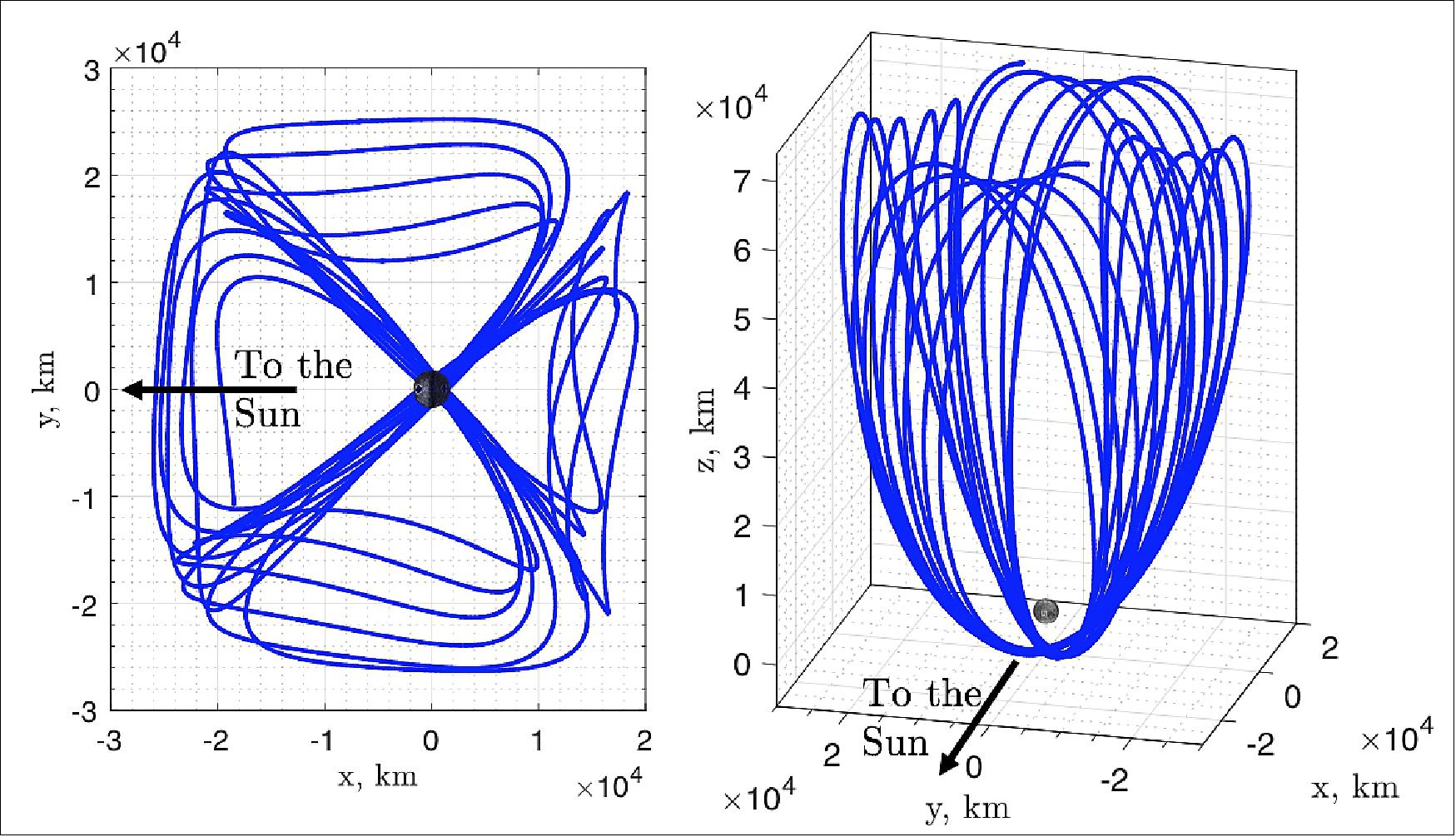
Design approach: The EQUULEUS trajectory is very challenging because of the fixed initial conditions , low thrust and Δv capabilities, and chaotic dynamics. The trajectory is split in a science phase, a forward transfer phase, and a backward transfer phase. In the science phase, we produce a database of thousands of quasi-periodic orbits around the Earth-Moon L2 libration point, computed in high-fidelity model with no deterministic maneuvers for at least 180 days, and evaluate their stability properties and station-keeping costs. 7) - A new approach is being developed to enforce the new science and flight system constraints. Figures 3 and 4 show an example 1:4 synodic resonant periodic orbit that avoids eclipses for six months and fulfill both of the science requirements for large windows of its period.
In the transfer phase, millions of potential transfer orbits will be computed, using the three degrees of freedom of the Δv1 to map the initial states into apogees, and from the halo orbits back to the same apogee (Ref. 7). For both the science and transfer phases, first guess solutions are generated patching trajectory bits computed in different models; the first guess solutions are then optimized by jTOP 8) in a high fidelity model that includes Earth, Sun and Moon ephemerides and low-order gravitational harmonics of the Earth and Moon.
Spacecraft
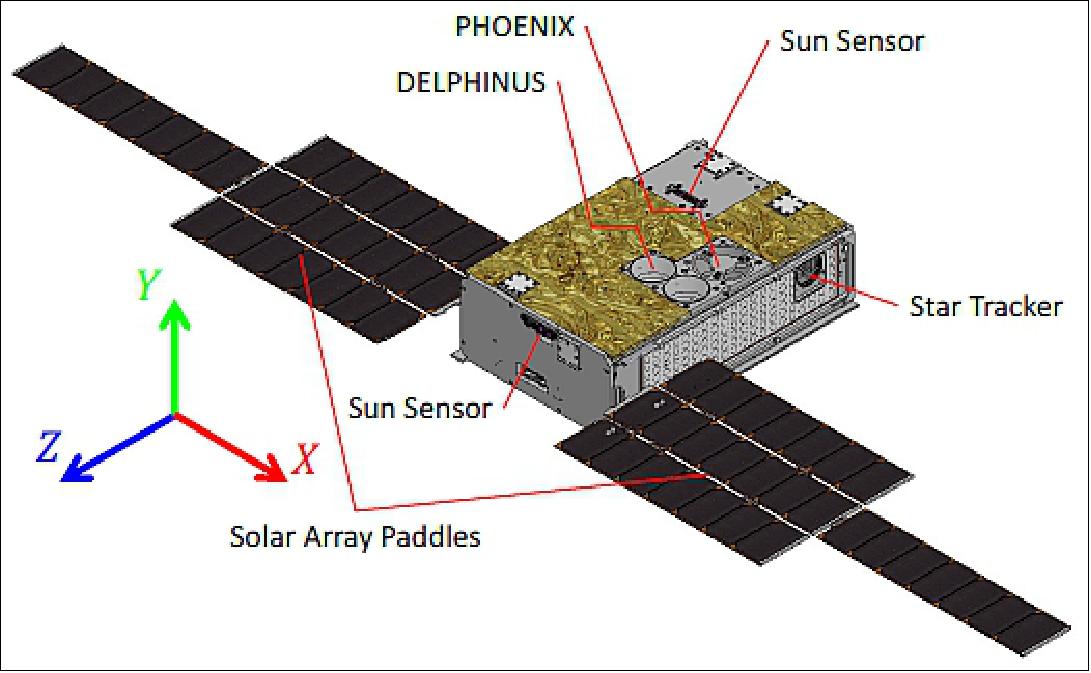
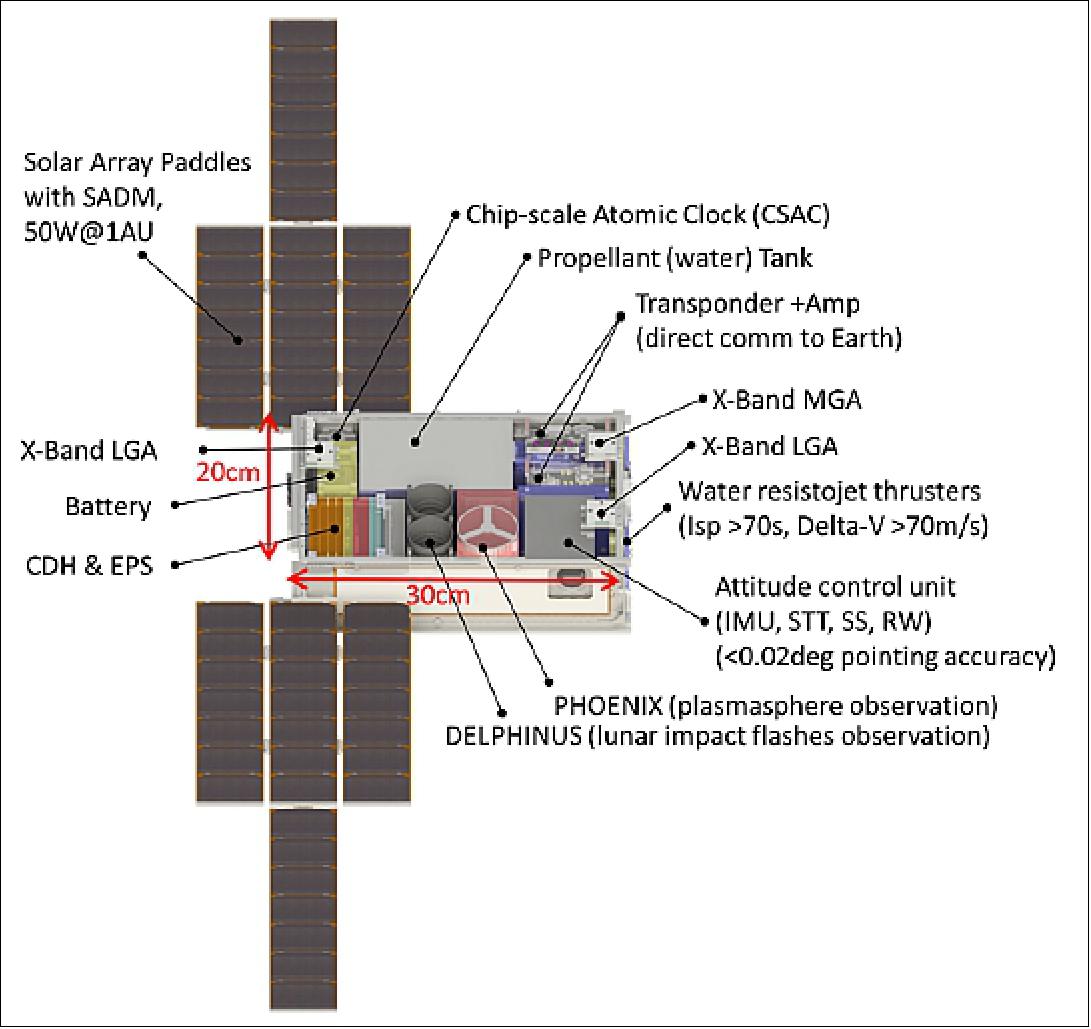
EQUULEUS is a nanosatellite of the 6U CubeSat format designed jointly by JAXA (Japan Aerospace Exploration Agency) and the ISSL (Intelligent Space Systems Laboratory) of the University of Tokyo. It will measure the distribution of plasma that surrounds the Earth to help scientists understand the radiation environment in the region of space around Earth. It will also demonstrate low-energy trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon Lagrangian point (EML2).
EQUULEUS is a three axis stabilized spacecraft powered by solar arrays. The spacecraft is equipped with the AQUARIUS (AQUA ResIstojet propUlsion System) propulsion system consisting of eight water thrusters also used for attitude control and momentum management. The spacecraft will carry ~1.5 kg of water, and the complete propulsion system occupies about 2.5 units out of the 6 units total spacecraft volume. AQUARIUS is a newly developed warm-gas propulsion system that uses water as propellant. The expected thrust is 3.3 mN and the Isp is 70 s; the spacecraft wet mass is 11.5 kg, including 1.22 kg of water that would provide about 77 m/s of Δv. 9)
Most elements of the spacecraft utilize COTS (Commercial Off-The-Shelf) components, some are designed based on the experiences on the various past space missions. The project employed COTS components for the attitude control system and the solar array paddles. XACT-50 from Blue Canyon Technologies, which is an integrated unit of IRU (Inertial Reference Unit), STT (Star Tracker), RWs (Reaction Wheels), is used for the three-axis attitude control system, and HaWK (High Watts per Kilogram) from MMA, LLC, which are solar array paddles with a one-axis gimbal function; these components are used with some customization for the EQUULEUS mission.
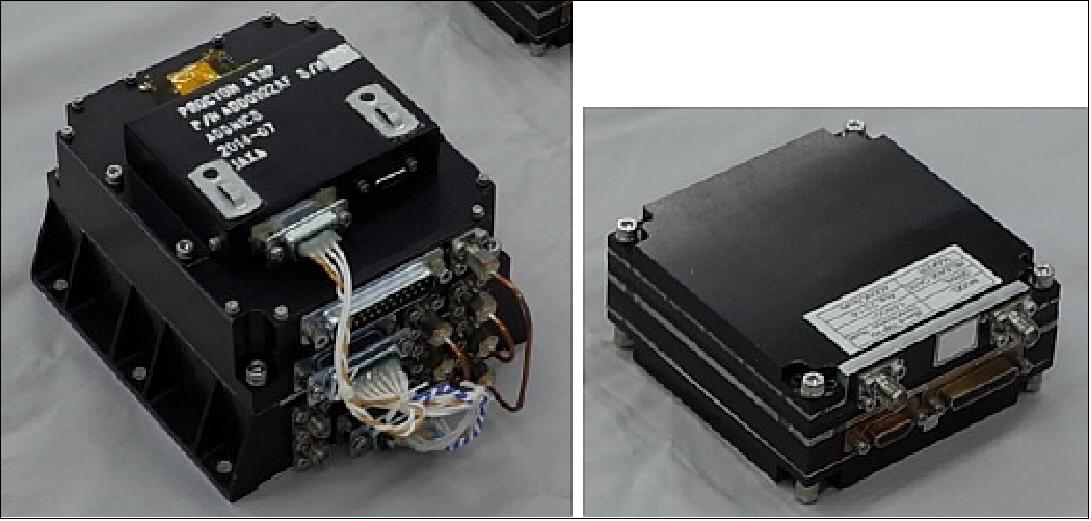
Most of the bus components are based on the design of the PROCYON (Proximate Object Close flyby with Optical Navigation) mission and other 50 kg class Earth-orbiting microsatellites (note: PROCYON was an asteroid flyby space probe that was launched together with Hayabusa-2 on 4 December 2014). Electronics boards were redesigned to fit within the “CubeSat form factor”. For example, the deep space X-band transponder which had been demonstrated on PROCYON was redesigned to significantly reduce its volume to fit within the CubeSat envelope (Figure 5).
The design of the mission instruments utilizes the experiences on the past space missions. The design of PHOENIX was optimized for EQUULEUS based on instruments onboard the previous space missions such as UPI (Upper Atmosphere and Plasma Imager) on Kaguya (SELENE mission), IMAP (Ionosphere, Mesosphere, upper Atmosphere, and Plasmasphere) of JAXA on ISS, and EXCEED on Hisaki [SPRINT-A (Spectroscopic Planet Observatory for Recognition of Interaction of Atmosphere)]. The electronics board of CLOTH was designed based on the ALADDIN (Arrayed Large-Area Dust Detectors in INterplanetary space) onboard the IKAROS solar sail demonstration mission. The image processing unit for DELPHINUS mission utilizes the image feedback control unit for the asteroid detection telescope for PROCYON.
Mission Status
Development status
• July 27, 2021: Two additional secondary payloads that will travel to deep space on Artemis I, the first flight of the Space Launch System (SLS) rocket and Orion spacecraft, are ready for launch. 10)
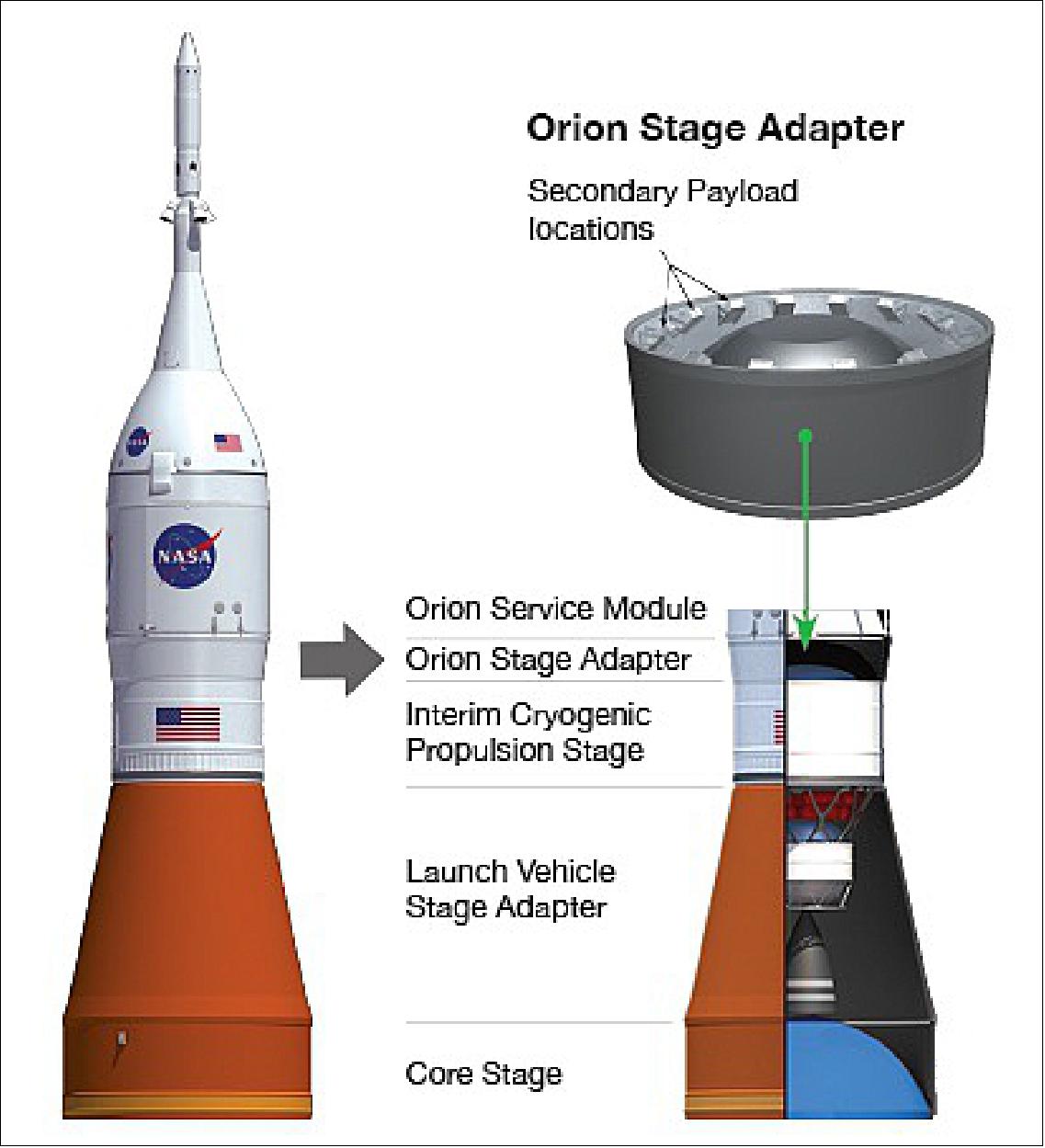
- The Team Miles and EQUilibriUm Lunar-Earth point 6U Spacecraft (EQUULEUS) CubeSats are tucked into dispensers and installed in the Orion stage adapter – the ring that connects Orion to the SLS rocket. They are joining five other secondary payloads that were recently installed. These small satellites, known as CubeSats, will conduct a variety of science experiments and technology demonstrations. The CubeSats will deploy after the Orion spacecraft separates from SLS.
- Developed by Miles Space in partnership with software developer Fluid & Reason, LLC, the Team Miles CubeSat will travel to deep space to demonstrate propulsion using plasma thrusters, a propulsion that uses low-frequency electromagnetic waves. The CubeSat was developed as part of NASA’s Cube Quest Challenge and sponsored by the agency’s Space Technology Mission Directorate (STMD) Prizes, Challenges, and Crowdsourcing program. The team, composed of citizen scientists and engineers, came together through the nonprofit Tampa Hackerspace in Florida to develop Team Miles. The group considers itself a team of “makers,” who are open to trying technologies that may fall outside of engineering norms.
- Team Miles’ mission will be flown autonomously by a sophisticated onboard computer system. In addition, the breadbox-sized spacecraft will use a SDR (Software Defined Radio) for communications with Earth. If successful, the CubeSat will travel farther than this size of craft has ever gone – 59.6 million miles (96 million km) – before ending the mission. (For comparison, the minimum distance from Earth to Mars is around 34 million (54 million km).
- EQUULEUS, developed jointly by JAXA (Japan Aerospace Exploration Agency) and the University of Tokyo, will travel to Earth-Moon Lagrange Point 2, an Earth-Moon orbit where the gravitational pull of the Earth and Moon equal the force required for a small object to move with them. The CubeSat will demonstrate trajectory control techniques within the Sun-Earth-Moon region and image Earth’s plasmasphere, a region of the atmosphere containing electrons and highly ionized particles that rotate with the planet.

- EQUULEUS will measure the distribution of the plasmasphere, providing important insight for protecting humans and electronics from radiation damage during long space journeys. The CubeSat will also measure meteor impact flashes and the dust environment around the Moon, providing additional important information for human exploration. EQUULEUS will be powered by two deployable solar arrays and batteries, propelled by a warm gas propulsion system with water as the propellant.
- SLS will launch America into a new era of exploration to destinations beyond Earth’s orbit and demonstrate the rocket’s heavy-lift capability. The agency is taking advantage of additional available mass and space to provide the rare opportunity to send several CubeSats to conduct science experiments and technology demonstrations in deep space. All CubeSats are deployed after SLS completes its primary mission, launching the Orion spacecraft on a trajectory toward the Moon.
• EQUULEUS was officially selected as one of the thirteen secondary payloads on SLS EM-1 in April 2016. The spacecraft is jointly developed by the University of Tokyo and JAXA. All of the system integration and electrical tests is conducted at the University of Tokyo. Part of the system-level environmental tests such as vibration and thermal vacuum tests are conducted outside of the University of Tokyo, e.g. CENT (Center for Nanosatellite Testing) at the Kyushu Institute of Technology, which is located in the western part of Japan.
- After the official selection, the development of the spacecraft engineering model (EM) started. System level environmental tests were completed by the end of 2017. The flight model (FM) design was made considering the EM test results, and the EQUULEUS project passed the CDR (Critical Design Review) in June 2018.
- Now the flight model manufacturing and integration is being conducted, aiming at the spacecraft ready for the launch in 2019.
Launch: The launch of the uncrewed EM-1(Exploration Mission-1) is expected in 2021 on the maiden test flight of NASA’s SLS (Space Launch System). The launch will be from Launch Complex 39-B at the Kennedy Space Center, Cape Canaveral, FL. 11)
Sensor Complement
PHOENIX (Plasmaspheric Helium ion Observation by Enhanced New Imager in eXtreme ultraviolet)
PHOENIX will conduct the imaging of the Earth's plasmasphere in the EUV (Extreme Ultraviolet) wavelength range. The observations will be conducted throughout all mission phases and enhance the geospace in-situ observation conducted by the ERG (JAXA's small space science mission launched in 2016) and NASA’s Van Allen probe missions. As a result, the project can improve our understanding of the radiation environment around the Earth, which is one of the critical issues for future human cis-lunar exploration. 12)
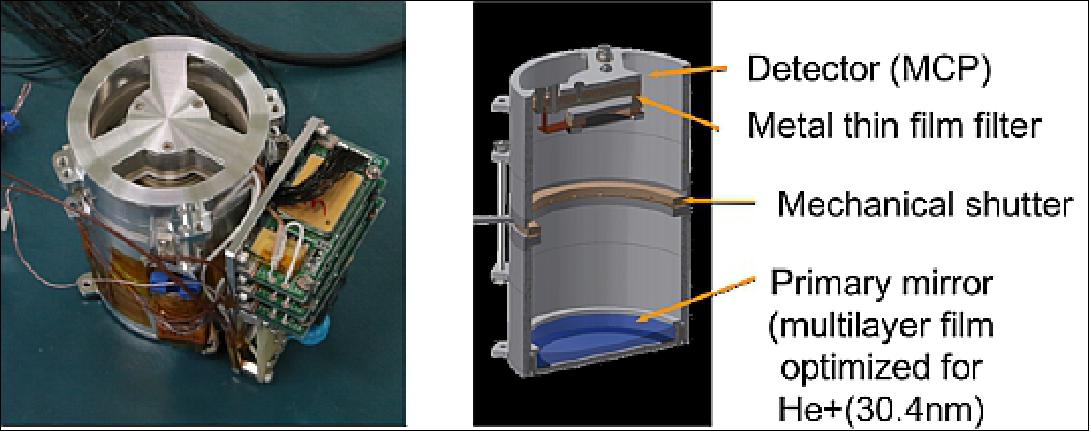
PHOENIX consists of multilayer-coated entrance mirror (diameter of 60 mm) and photon counting device (microchannel plate and resistive anode encoder), and electronics parts. The reflectivity of the mirror is optimized for the emission line of helium ion (wavelength of 30.4 nm) which is the important component of the Earth’s plasmasphere. 13)
Scientific Objective: The Earth’s plasmasphere is the region where dense plasma from the ionosphere is captured along the closed magnetic field lines. In the plasmasphere, it is known that various phenomena are caused by the electromagnetic disturbances in the solar wind. Helium ions are the second major component in the plasmasphere (almost 10% of the total amount), and resonantly scatter the solar EUV emission at the wavelength of 30.4 nm. By flying far from the Earth, PHOENIX provides the whole image of the Earth’s plasmasphere to understand the spatial/temporal evolution of the plasmasphere.
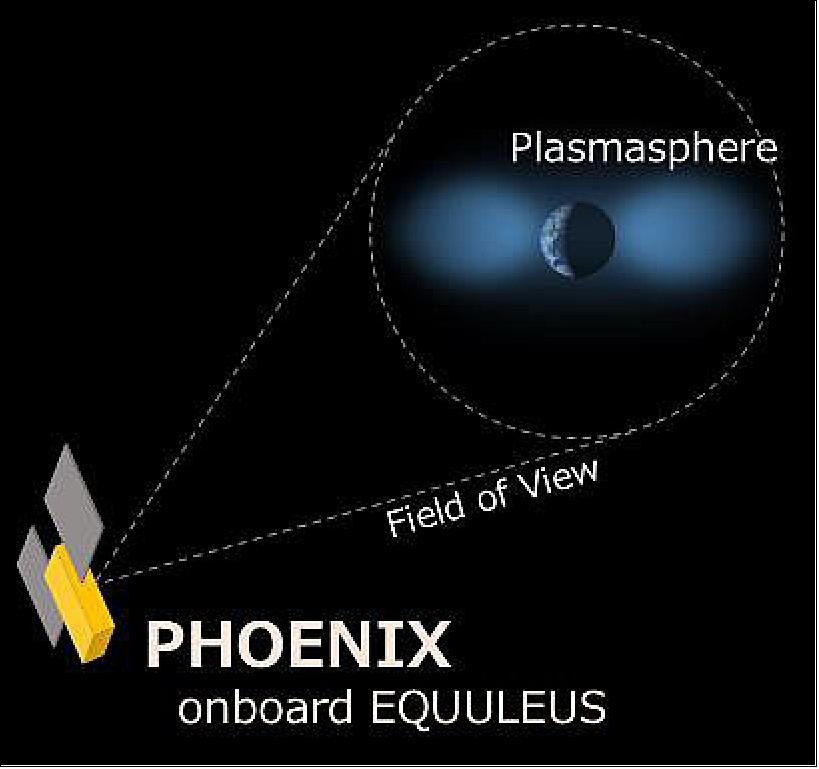
PHOENIX is a telescope to observe extreme ultraviolet emission from He+ in the Earth’s plasmasphere. The primary science objective of this telescope is to clarify the physical process governing the terrestrial plasmas of the Earth and improve our understanding of the radiation environment around the earth. The second objective is observation of the plasmasphere structure with respect to the magnetic field of the Earth to improve the understanding of the evolution of the atmosphere of the earth and earth-like planets. The whole view of the plasmasphere cannot be observed in low earth orbits since the plasmasphere expands over 10 RE radius. Thus, a lunar probe EQUULEUS is a good opportunity to observe the whole view of the large structure. The plasmasphere observation is mainly conducted on the way to the EML2. 14)
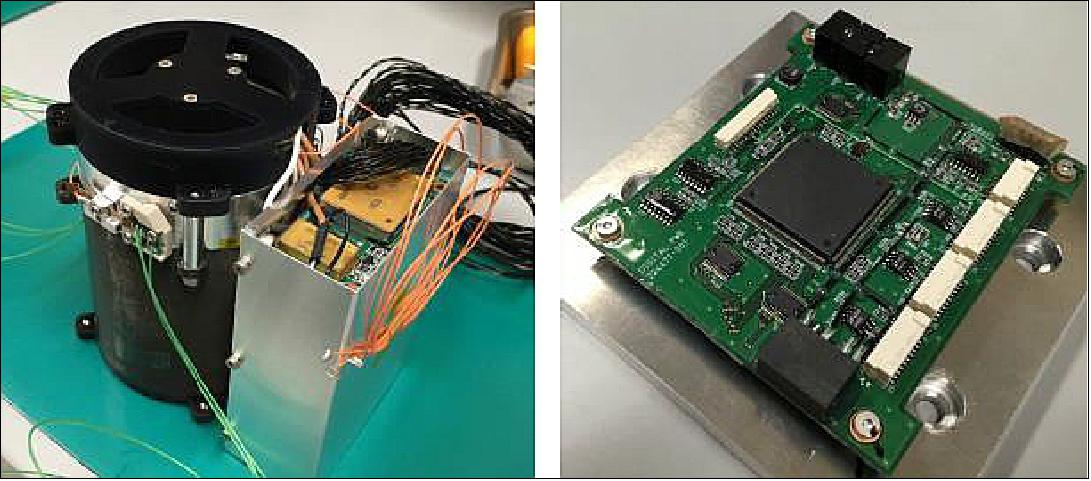
Design: PHOENIX is constructed with an optical part, a high-voltage circuit, a mechanical shutter, and a control circuit board. The specifications of PHOENIX are summarized in Table 1, and the flight model of the telescope and the circuit board to control the telescope are shown in Figure 12. The basic method to observe extreme ultraviolet has been verified in the several former space missions.
Mass and size of telescope | 0.48 kg, 70 x 70 x 100 mm |
Mass and size of circuit board | 0.06 kg, 100 x 100 mm |
Power | 1.8 W (maximum) |
Field of view | 11.9º x 11.9º |
Spatial resolution | 0.085º (0.1 RE from the moon orbit) |
Count rate | 3 count/min/pix/Rayleigh |
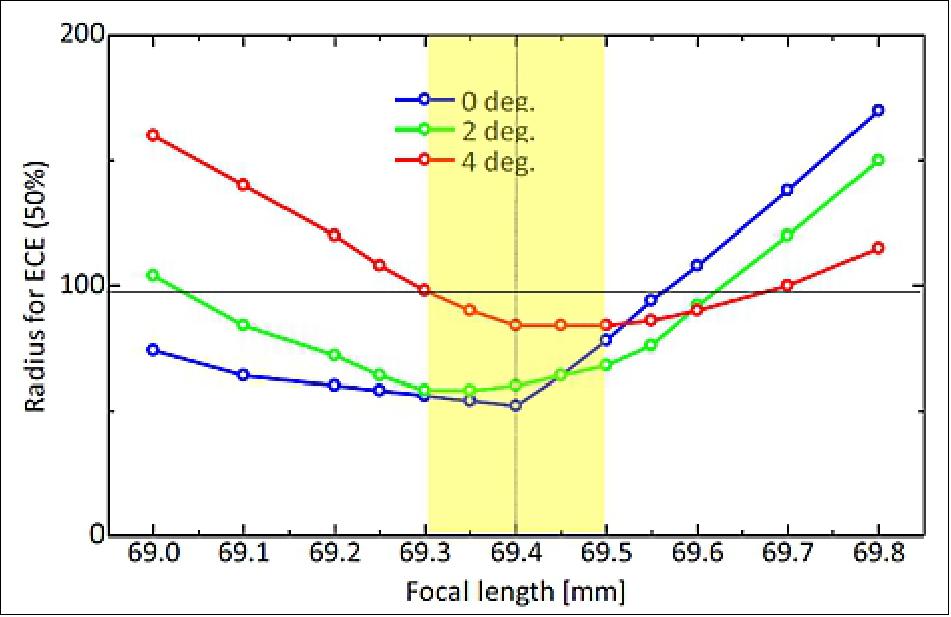
The optical part consists of a 53-mm diameter primary mirror, a metallic thin filter, and three-stage microchannel plates (MCP). The focal length is 69.4 mm, and spatial resolution is 0.1-RE at the moon orbit. The surface of the primary mirror is coated by Mo/Si to enhance the reflectance of 30.4 nm wavelength (extreme ultraviolet from He+) and to eliminate contamination from other wavelengths such as 121.6 nm (H) and 58.4 nm (He). The thin filter additionally eliminates the signal contamination. The MCP device converts the incoming photons into electron clouds, and a high voltage (around 2.5 kV) is impressed to generate an electron avalanche and to obtain the sufficient gain. The electron clouds are collected onto the resistive anode with three channels. The position of an incoming photon can be calculated from the relative gain between three corners.
To get a clear image of the plasmasphere by using PHOENIX, an hour integration time is required. EQUULEUS has to stabilize its attitude within 0.08º (3σ) accuracy during the exposure time. Since an hour stabilization is too long for CubeSats, we divided the exposure time to 10 minutes x 6 shots, and these 6 images will be downlinked and integrated on the ground. For a long and frequent observation of the plasmasphere, EQUULEUS continuously takes images by using PHOENIX during the cruising phase to the EML2. We can totally observe the plasmasphere over four months, and take an image every ten minutes in the minimum period. The main OBC (OnBoard Computer) of EQUULEUS has enough storage for the large amount of image data.
The mechanical shutter is attached to protect the thin filter from overheat by the direct incidence of the solar light. An iris diaphragm mechanism is selected as the shutter system, and the iris is driven by two biometal fibers to open and close the shutter. The shutter also has magnetic sensor to detect whether the shutter is opened or closed. To protect the thin film from sun light, an autonomous shutter closing algorithm is essential. The algorithm implemented on the main OBC detects a failure of the attitude control system, and generates a command to close the shutter.
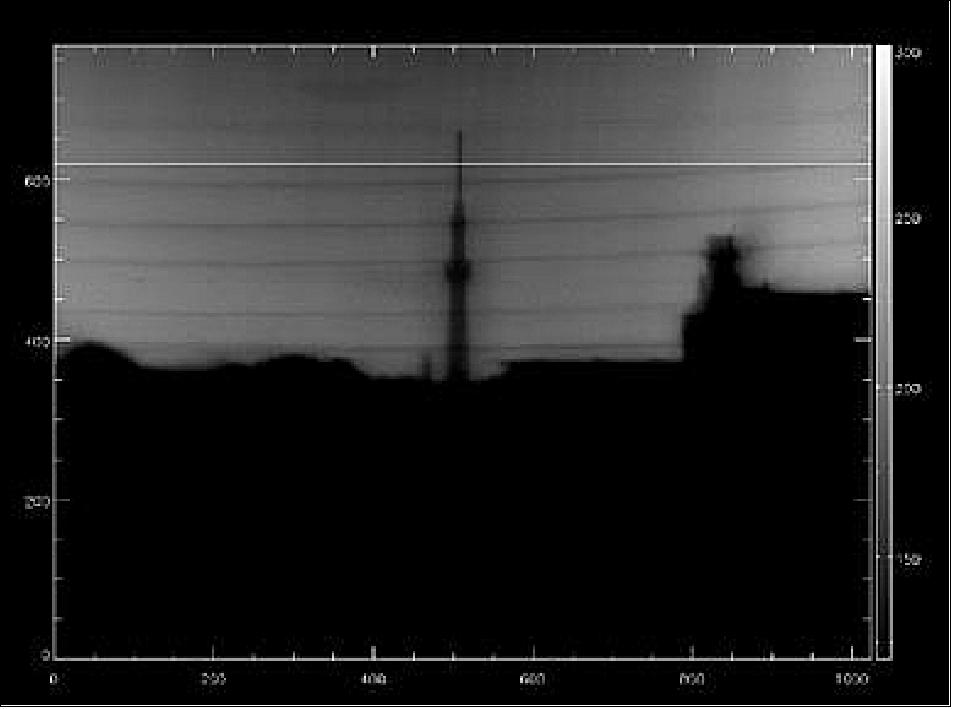
Development Status: The optics of PHOENIX mentioned above was developed and tuned to reach the required performance. The focus is optimized by modifying the distance between the mirror and the detector with various thickness of shims. For this optimization process, the CCD detector which is attached at the same optical plane as the MCP is used because the MCP is not applicable for the operation outside the vacuum condition. Figure 13 is test image taken by the CCD with PHOENIX optics. Figure 14 shows the simulated focal length dependency of the radius of the 50% encircled energy (ECE). The final optimization test with flight model is planned to be made in the coming summer.
The robustness of the mechanical shutter during the launch was verified in a unit vibration test. In the prototype model, the shutter has been accidentally opened during the vibration test. After that, to prevent the accidental open of the shutter, the buckle design was changed, and the center of mass was aligned to the geometric center of the shutter by using small counter masses. Then the mechanical robustness was completely verified in the unit vibration test for the flight model. Furthermore, the mechanical shutter open/close driving test was successfully demonstrated hundred times in a vacuum chamber after the vibration test.
CLOTH (Cis-Lunar Object detector within THermal insulation)
CLOTH is a dust detector within multi-layered thermal insulator (MLI) to observe micrometeoroids environment in the cislunar region. The objective of CLOTH is to detect and evaluate the meteoroid impact flux in the cis-lunar region by using dust detectors. The goal of this mission is to understand the size and spatial distribution of solid objects in the cislunar space.
By combining results of both CLOTH and DELPHINUS, we will learn spatial distribution and temporal variation of solid objects in the cis-lunar space, which will benefit Solar System science.
In addition, CLOTH can isolate thermal incidence and emission between the spacecraft interior and space environment, so that we can control the internal temperature of spacecraft. The integrated dust detector with a MLI (Multi-Layered thermal Insulator), which we call “smart MLI”, can efficiently expand the effective area of the sensors in the limited size of CubeSats. The secondary mission is to demonstrate the new smart MLI concept. The MLI is easy to use for other satellites and spacecraft which needs MLI for thermal control. Then, all spacecraft can detect impacts of dust for space debris or natural dust monitoring.
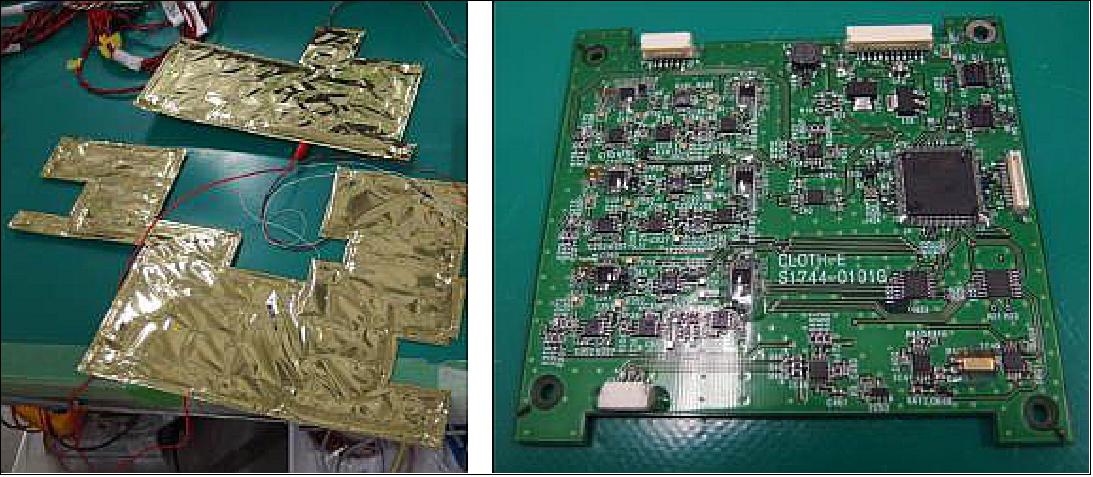
Design: CLOTH is constructed with the smart MLI parts, and a control circuit board. The specifications of CLOTH are summarized in Table 2, and the flight model of the two of integrated sensors for the plus Y and the minus Y plane and the circuit board are shown in Figure15. The sensor design is based on the dust detector named ALADDIN mounted on IKAROS spacecraft (Ref. 14).
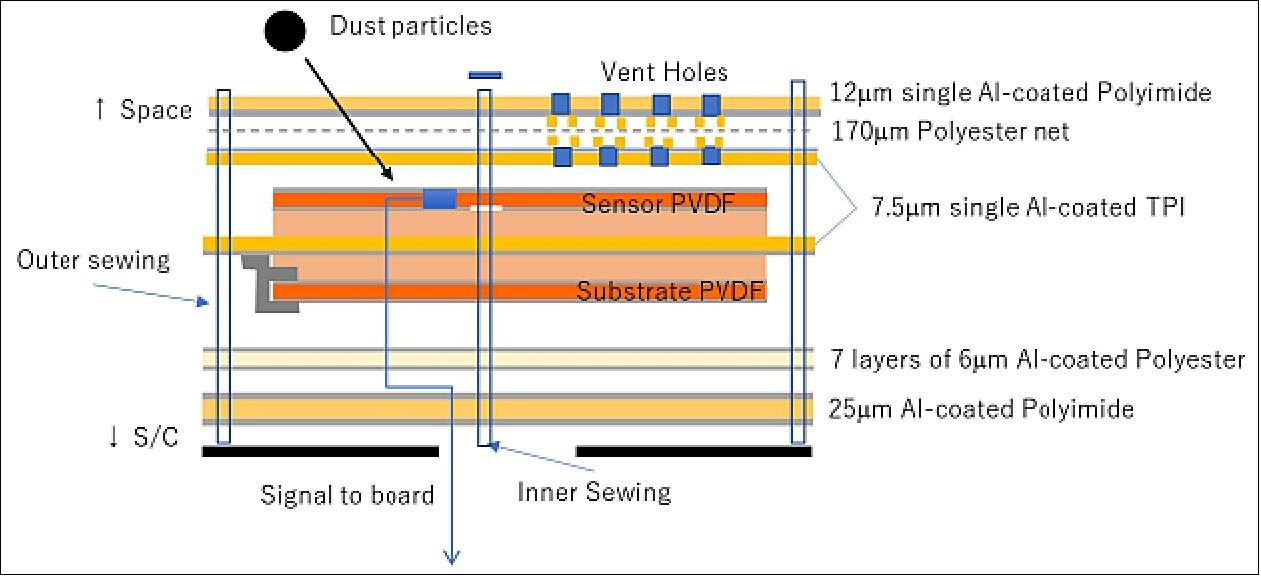
The detailed architecture of the smart MLI is illustrated in Figure 16. PVDF (PolyVinylidene DiFluoride) piezoelectric films are used for the dust sensor and installed inside the MLI. The total sensitive area is decided to detect one dust larger than 3-um diameter per month in minimum. CLOTH instrument is activated almost all of the flight time of EQUULEUS. During the two years mission life, we expect that we can detect over twenty micrometeoroids around the cislunar region. The signal from the PVDF films is inputted to the circuit board. The board has several analog circuits for signal processing: pre-amplifiers, band-pass filters, rectifiers, and integrators. The integrated signal is analyzed by the digital processing unit on the circuit board, and dust detection flags are sent to the main OBC. When a dust detection flag indicates a dust is detected, the main OBC automatically store the sensor data around (i.e., future and past) the detected timing to a non-volatile memory.
Total mass of sensors | 0.03 kg |
Mass and size of circuit board | 0.03 kg , 100 x 100 mm |
Power | 1.0 W (maximum) |
Total sensitive area | 439 cm2 |
Detectable dust size | > 4 µm at > 10 km/s |
The remarkable feature of CLOTH compared to the conventional dust detectors is its light weight and large sensor area without any special thermal control. The conventional detectors were developed as a dedicated instrument for science missions, so the ratio of sensor area to instrument mass tends to be low e.g. 1000 cm2 at >5 kg. On the other hand, CLOTH achieves about 50 times higher area/mass ratio thanks to our smart MLI concept.
The smart MLI was designed not only for the dust detection but also for the passive thermal control of the spacecraft. To satisfy a requirement from thermal design for EQUULEUS mission, the effective absorption α and the effective emissivity ε of the MLI both have to be smaller than 0.05. The expected values are worse than common MLIs (α, ε < 0.01) because following specific disadvantages for CubeSat thermal isolation was considered. First disadvantage is smaller size of MLIs for CubeSats. Outer edges of the MLI degrade the isolation performance since the thermal connection between face and back side at the edge is too strong. The outer edge length and MLI area ratio of small MLIs becomes larger than large ones. Thus, the isolation performance of the MLIs of CubeSats tends to be worse than that of large satellites. Second disadvantage is strict envelope limited by a dispenser type rocket interface. During the launch, most of the CubeSats are in boxes attached with rockets and should not exceed the envelope constraint. In order to satisfy the constraint, the face and back side of the MLI for EQUULEUS is roughly connected by sewing. The sewing points transfer heat from face to back side, and the thermal isolation performance is degraded. The thermal isolation layers of the smart MLI was designed based on that of PROCYON spacecraft, 15) and several proto types were developed and tested whether the thermal isolation performance satisfies the requirement of the mission.
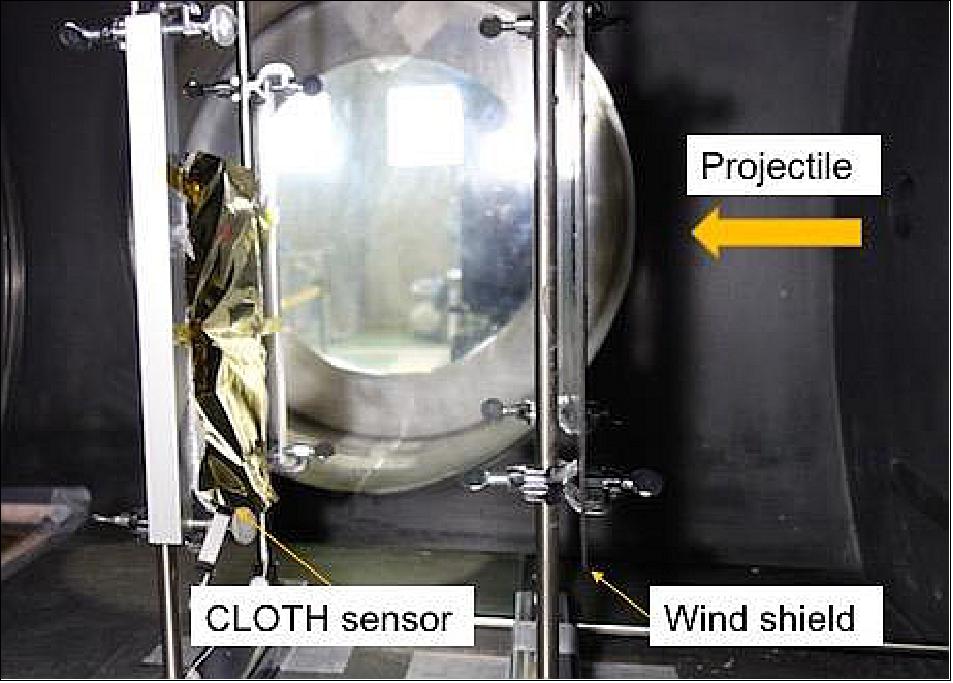
Development Status: The flight model of CLOTH was already developed as shown in Figure 15. A unit thermal cycle test and a vibration test were successfully finished. Furthermore, in order to verify the capability of dust detection, a high-speed impact test is conducted. Figure 17 shows the experiment setup inside the vacuum chamber at the hypervelocity impact tests with the light gas gun of JAXA/ISAS. We used the test piece of CLOTH sensor which has the same layer configuration made of the same materials as the flight model of the MLI. The sensor was connected to the flight spare of the circuit board outside the chamber. Micron-sized dust simulant particles (projectiles) made of soda-lime glass were accelerated up to 6 km/s mainly with the single shot style. 16) At the projectile impact, the analog signal waveforms generated on the electronics were recorded to the digital storage oscilloscope.
From the signal amplitude analysis and the microscopic observation of impact holes or craters left on the MLI, the dust detection performance of CLOTH was estimated in light of both the penetration threshold of sensor part (the outermost layer of MLI) and the amplification magnitude of electronics part. The final determination of detection performance of the flight model will be finished in the near future though; we here report the current calibration results. A numerical simulator we developed revealed that CLOTH has a capability of detecting a dust particle with ~4 µm at the impact velocity of 10 km/s including the amplification magnitude of electronics. 17)
According to the thermal vacuum test for the proto type model of EQUULEUS, the thermal isolation performance of the smart MLI was estimated as α = 0.01 and ε = 0.02, and these values are better than the expectation mentioned before. It is acceptable to use the MLI as a thermal insulator for EQUULEUS. The analysis verified that the PVDF films to detect dust does not degrade the thermal isolation performance, and the smart MLI concept is applicable for thermal isolation of every spacecraft. However, the proto type MLI has a possibility of EQUULEUS’s envelope constraint violation. Hence, we modified the MLI to be thinner for the flight model. The thermal isolation performance may be degraded, but it has enough margin for the thermal design. The final thermal isolation performance was measured in the thermal vacuum test of the flight model of EQUULEUS, and the data will be analyzed soon.
DELPHINUS (DEtection camera for Lunar impact PHenomena IN 6U Spacecraft)
DELPHINUS will observe the LIFs (Lunar Impact Flashes) at the far side of the moon from EML2 for the first time. This observation will characterize the flux of impacting meteors, and the results will contribute to the risk evaluation for future human activity and/or infrastructure on the lunar surface (Ref. 14). 18) 19)
Though DELPHINUS is one of the smallest celestial constellations, ranked 20th in size among 88 constellations, its shape consisting of five 4th stars is beautifully decorated in the summer constellation, and is next to EQUULEUS which is 2nd smallest constellation.
The DELPHINUS instrument is a telescope system whose main purposes are (1) to observe lunar impact flashes (LIFs), and (2) to observe Near-Earth Objects (NEOs) such as asteroids, comets and Temporarily Captured Orbiters (TCOs or mini-moons). A LIF is transient flash generated when a meteoroid strikes to the surface of the moon. In order to investigate size distribution, influx ratio and daily variation of meteoroids around the cislunar region, observations of LIFs are important.
LIF (Lunar Impact Flash): Meteoroids are small rocky bodies traveling through interplanetary space. The various mass ranges of meteoroids ranging between 10-15 and 1015 grams are continuously colliding with the Earth-Moon system. Meteors are phenomena caused by the interaction of meteoroids with the Earth’s upper atmosphere, while meteoroid’s impact on the moon can be recognized by the optical flash of light produced when a meteoroid impacts the lunar surface. The influx rate of interplanetary dust onto the Earth-Moon surface is essential for understanding solar system evolution and is useful for the human space activities in the Cis-Lunar space, which is the volume within the Moon’s orbit. Thus, it is very important to investigate size distributions, influx rate and daily variation of meteoroids.
NASA has detected about 430 LIFs in a 10-years ground-based observation. 20) However, telescopes on the ground cannot observe the far side of the moon. Hence, the DELPHINUS will observe the moon from a Halo orbit around the EML2 to detect LIFs including the far side. Since the Halo orbit is approximately 10 times closer to the moon surface than the Earth, and there are no light pollution and less influence of earthshine, we can detect darker LIFs by using a smaller telescope. In addition, because a space-based observation is not affect by the weather of the Earth, a long-time and continuous observation is possible. Thus, DELPHINUS can detect more and more LIFs than ground observations. Quantitatively, we try to detect over a hundred LIFs in a month.21) The goal of this observation is not only detecting far side LIFs but also contributing to risk evaluation for future human activities and infrastructures on the lunar surface. There are several similar missions for LIF observation, and DELPHINUS could be the pioneer of these missions. 22 22)
DELPHINUS has also capabilities for asteroid observations such as, TCOs (Temporary Captured Objects) and PHOs (Potentially Hazardous Objects) which will be observed during cruising phase to the EML2.
Design: DELPHINUS is constructed by two cameras and an image processing circuit board. The specifications of DELPHINUS are summarized in Table 3, and the flight model of the telescope and the image processing board are shown in Figure 18. To detect over a hundred LIFs per month, the detectable magnitude is decided as darker than 4.0 Vmag (visual magnitude) with 1/60 second exposure time, and the optical system (i.e. lens and detector) is designed to satisfy the requirement. The detector has been verified on orbit by a previous mission. The camera system is also designed to observe dark asteroids. DELPHINUS can observe 12.0 Vmag objects with 15 second exposure time.

Because the duration of flashes is only 0.01 seconds to 0.1 seconds, a 60 fps (frame per second) camera system is needed. However, the camera system generates huge image data, and EQUULEUS cannot downlink all data to the ground due to the limitation of communication capacity. Therefore, a real-time and on-board LIF detection algorithm is essential, and the algorithm is implemented on the FPGA based processing board. The key point of the design of LIF detection algorithm is how to correctly detect transient LIFs from the huge data with large noises. To distinguish a tur LIF from noise, the algorithm uses point spread function (PSF) information of LIFs, which is completely different from a systematic noise. In addition, for more robust determination of LIFs, DELPHINUS has two cameras and extracts two LIF candidate images from both cameras at the same timing. These two images will be downlinked and verified whether both images have similar flashes by science operator. The detail of the automatic LIF detection algorithm is described in reference 23).
Mass and size of telescope | 0.57 kg, 100 x 100 x 50 mm |
Mass and size of circuit board | 0.07 kg, 100 x 100 mm |
Power | 4.0 W (maximum) |
Pixel number and size | 659 x 494, 7.4 x 7.4 µm |
Wavelength | 400 nm – 800 nm |
Lens | f = 50 mm, F 1.4 |
Frame rate | 60 fps (maximum) |
Detectable magnitude | 4.5 Vmag (S/N=2) with 1/60 sec exposure time |
Development Status: The flight model of the two cameras and the FPGA based image processing board was completely developed, and several optical tests were conducted. The dark noise property depends on detector temperature was measured in a thermal cycle test. The focal length and PSF were verified in a unit thermal vacuum test. The sensitivity and flatness property of the optical system were measured by using a well calibrated integrating sphere. The limiting magnitude was estimated from data obtained in a real-sky test. Finally, a unit vibration test was conducted, and after that, it was verified that the optical properties were not changed by the vibration.
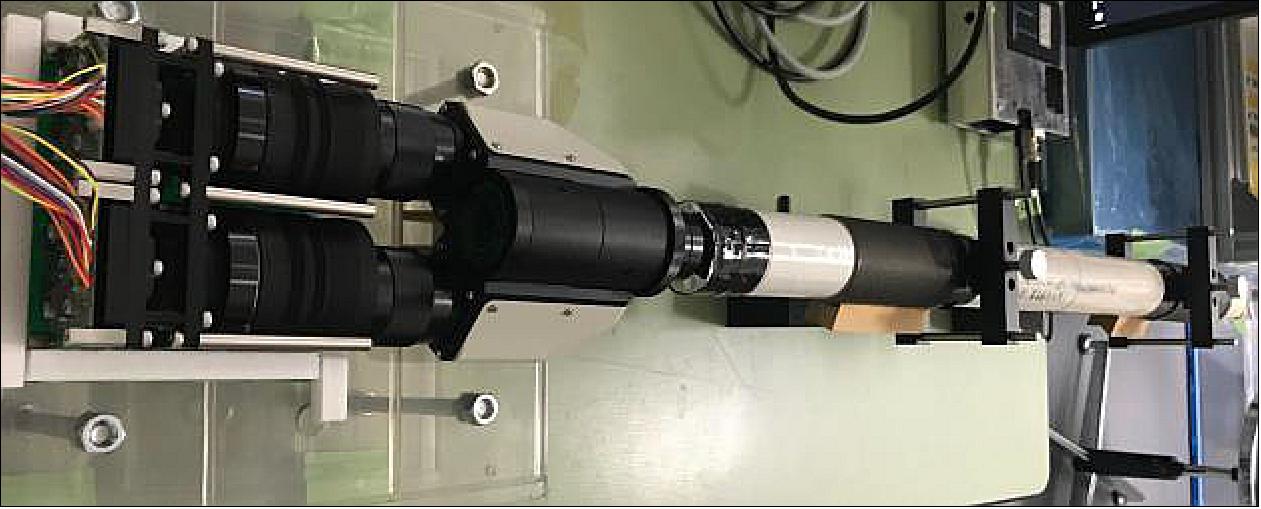
The real-time and on-board LIF detection algorithm was also developed and implemented on the FPGA board. The algorithm was verified by using a hardware based LIF simulator newly developed for DELPHINUS. Figure 19 shows the hardware optics simulator (right) and the flight model of DELPHINUS (left). The hardware simulator is constructed by a laser diode, a pulse generator, a dark filter, a collimator, and a beam splitter. A light generated by the laser diode is controlled by the pulse generator to emulate the momentum LIF phenomena. The dark filter tunes the magnitude of the light to suit a required magnitude of a LIF. The collimator converts the light to parallel light, and the beam splitter splits the parallel light to input the emulated LIF into both cameras of DELPHINUS.
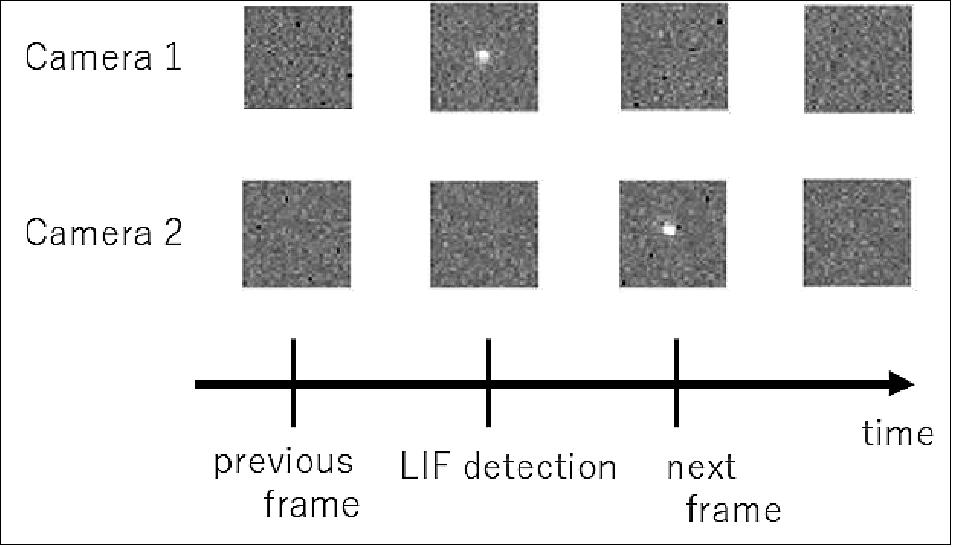
The LIF detection algorithm test was successfully demonstrated by using the hardware simulator. The simulator generated 4.0 Vmag LIFs, and DELPHINUS successfully detected the LIFs with both cameras even though the split beams were not completely aligned, and the position of the LIFs were not the same in the two cameras. The algorithm can calibrate such kinds of mis-alignments between two cameras, and it was also demonstrated in the test. Figure 20 shows a result of the hardware test. In the LIF detection algorithm, 4 images are extracted and stored from each camera (totally 8 images): an image at the LIF detection timing, an image before the detection, and two images after the detection. By using the before and after images, we can see the time variation of the magnitude of flashes. It is also robust for the timing offset between two cameras because the two cameras are not synchronized, and a frame offset may happen. A noise tolerance test was also executed in the thermal cycle test. During the thermal cycle test, the LIF detection algorithm was activated long time without any light incidence. The threshold to detect LIFs was set to a corresponding value with 4.0 Vmag, and it was verified that overloaded mis-detections did not occur.
Integration and Testing
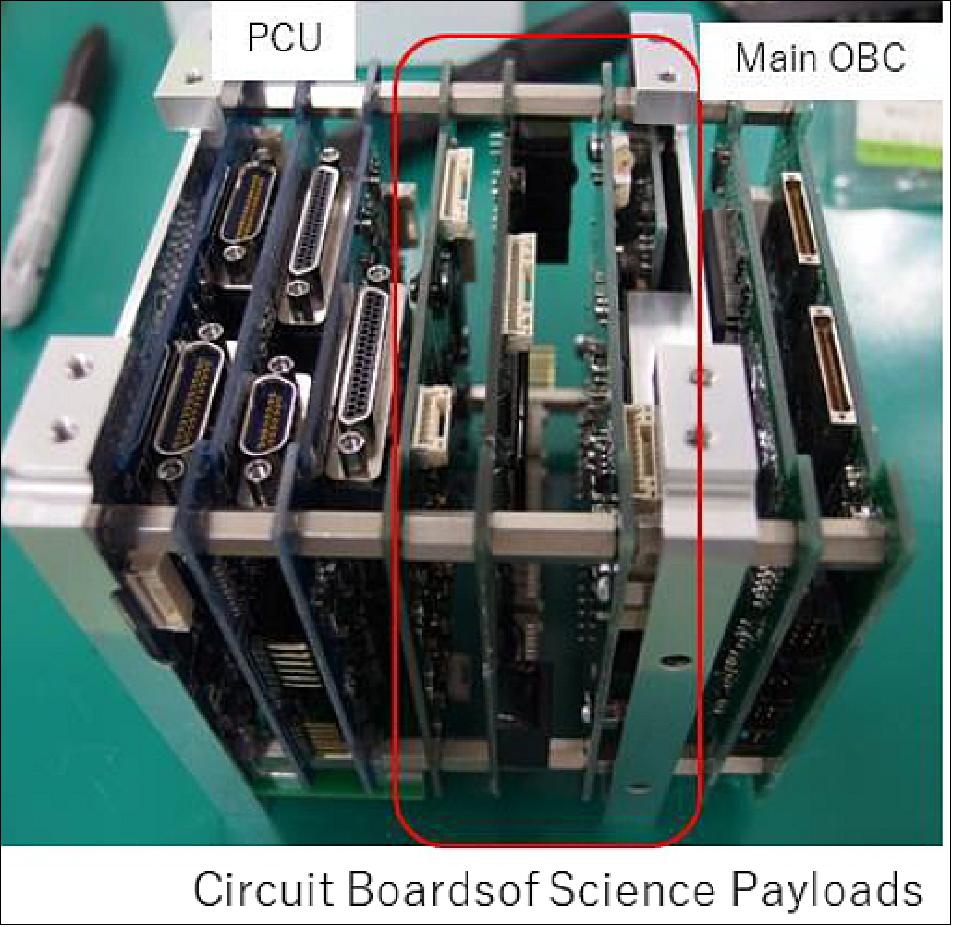
The developments and unit tests of the flight models of the three science instruments have been completed, and we started flight model integration and testing of EQUULEUS spacecraft. The flight model of EQUULEUS was integrated at the clean room in the University of Tokyo by students. Figure 21 shows the integrated circuit board box of 1U size. The box includes the main OBC, the PCU (Power Control Unit), and three circuit boards for the science instruments explained above. Figure 22 shows the integrated flight model of EQUULEUS. You can see the smart MLI of CLOTH, the two telescopes of DELPHINUS with cover (non-flight item), and the telescope of PHOENIX. The telescopes of DELPHINUS and PHOENIX are housed within the 1U size.
After the integration was finished, integrated tests were conducted. By the June 2019, an all function test, an integrated thermal cycle test, and a thermal vacuum test were completed. In the function test, hardware level connection and software level communication among all components and all functions of each component were tested in the integrated configuration including a communication with a ground station. Mutual interference among components was also tested. In the thermal cycle test, the flight model was installed in -20 to 50 degrees environment and tested most of the functions. In the thermal vacuum test, the flight model was installed into a thermal vacuum chamber and also tested the functions in a vacuum environment. In addition, the data related with thermal model was obtained to calibrate thermal parameters to suit real spacecraft configuration. Through the integrated tests, we found several small problems, and they can be fixed by the shipment deadline. After the modification of the small problems, we will conduct the final vibration test for the flight model of EQUULEUS. We also will complete the development of flight software, and send it to the KSC for the launch of SLS-EM1.

In summary, these instruments were designed and developed to satisfy the requirements derived from the science objectives under the constraints derived from the spacecraft configurations. The performance and space environment tolerance of the developed flight models were verified by unit test. Several problems found in the previous proto type models were already fixed.
The full flight model integration was also completed, and function tests and environment tests were conducted. These tests were almost successful, but several small problems to modify by the launch were revealed. We will modify the small problems, develop flight software, and conduct final vibration test by the shipment deadline to launch by the SLS-EM1 rocket.
OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)
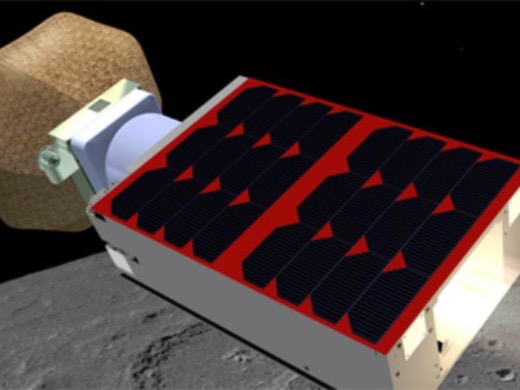
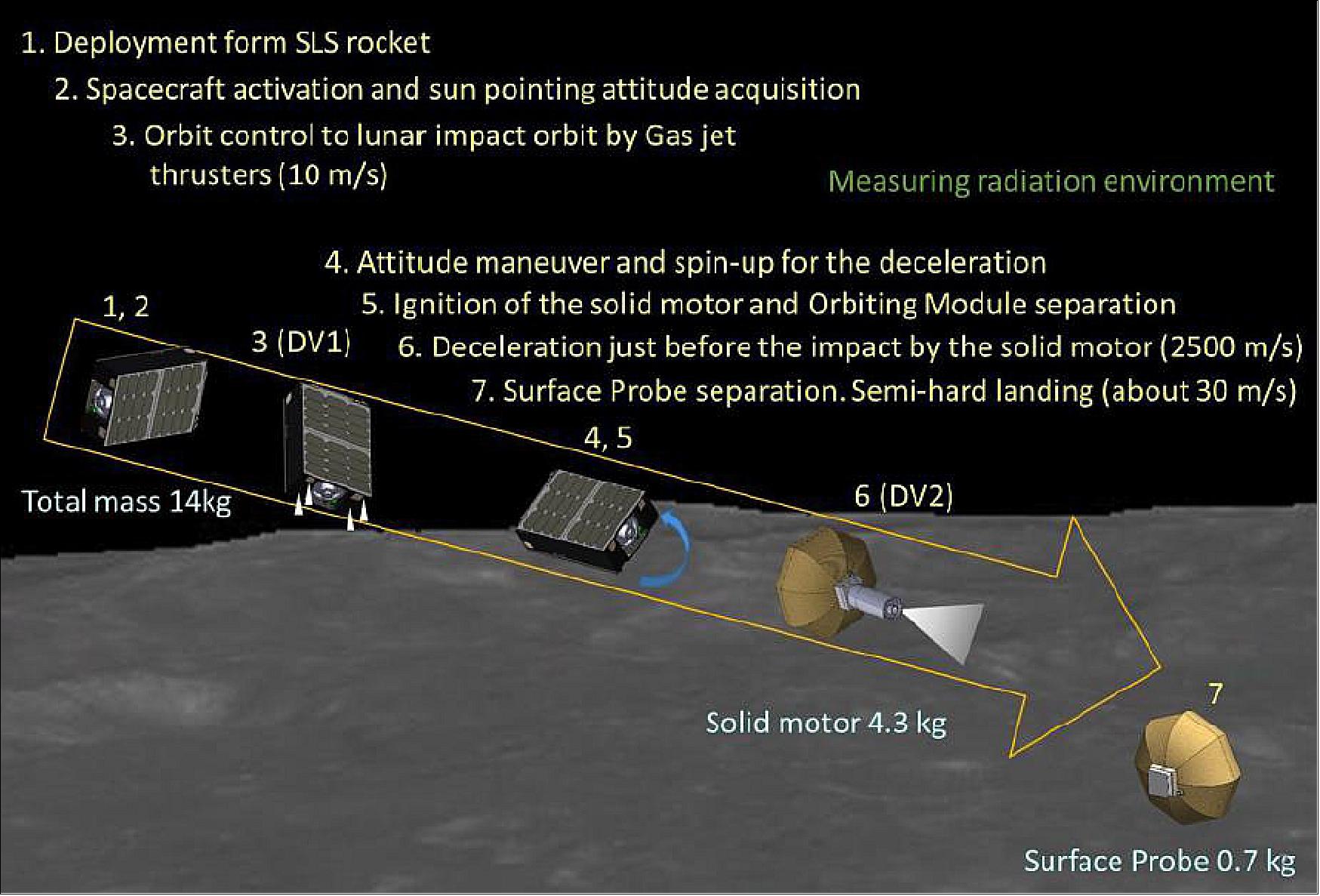
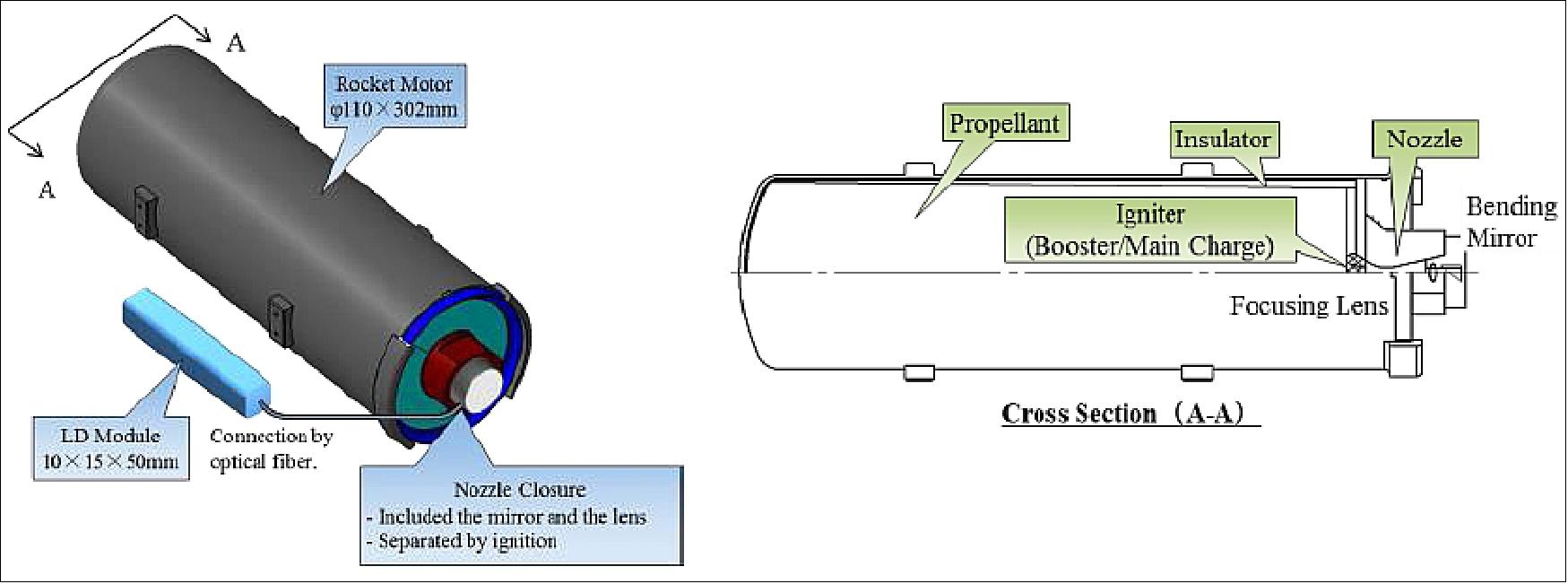
OMOTENASHI means “hospitality” in Japanese. OMOTENASHI will demonstrate the technology for landing a 1 kg nano-lander on the Moon. The nano-lander and a 6 kg solid rocket motor will be ejected from the CubeSat. The solid rocket motor will be ignited to slow the nano-lander as it descends to the Moon. Before impact, the nano-lander will separate from the solid rocket motor and a two-lobed airbag will be deployed to cushion the landing, which will occur at a velocity of about 30 m/s. The nano-lander will take measurements of the lunar surface radiation environment and investigate soil mechanics using accelerometers. Very small landers such as OMOTENASHI could enable multi-point exploration.
OMOTENASHI is a 6U CubeSat of JAXA, one of thirteen CubeSats to be carried with the Orion EM-1 Exploration Mission-1) into a heliocentric orbit in cislunar space on the maiden flight of the NASA SLS (Space Launch System), scheduled to launch in 2020. The goal is to demonstrate low-cost technology for a semi-hard landing on the Moon's surface after being deployed into a lunar fly-by orbit by the SLS/ EM-1 spacecraft. 24)
OMOTENASHI is a challenging mission. One of the main challenges comes from trajectory, which must be robust to execution and navigation errors. A robust trajectory must have a small flight path angle (FPA) at Moon arrival. In particular, the project analysis found that it must satisfy -7º ≤ FPA ≤ 0º in order to be error-robust. To this end, the design of the different arcs of the trajectory cannot be performed independently, as they are strongly coupled.
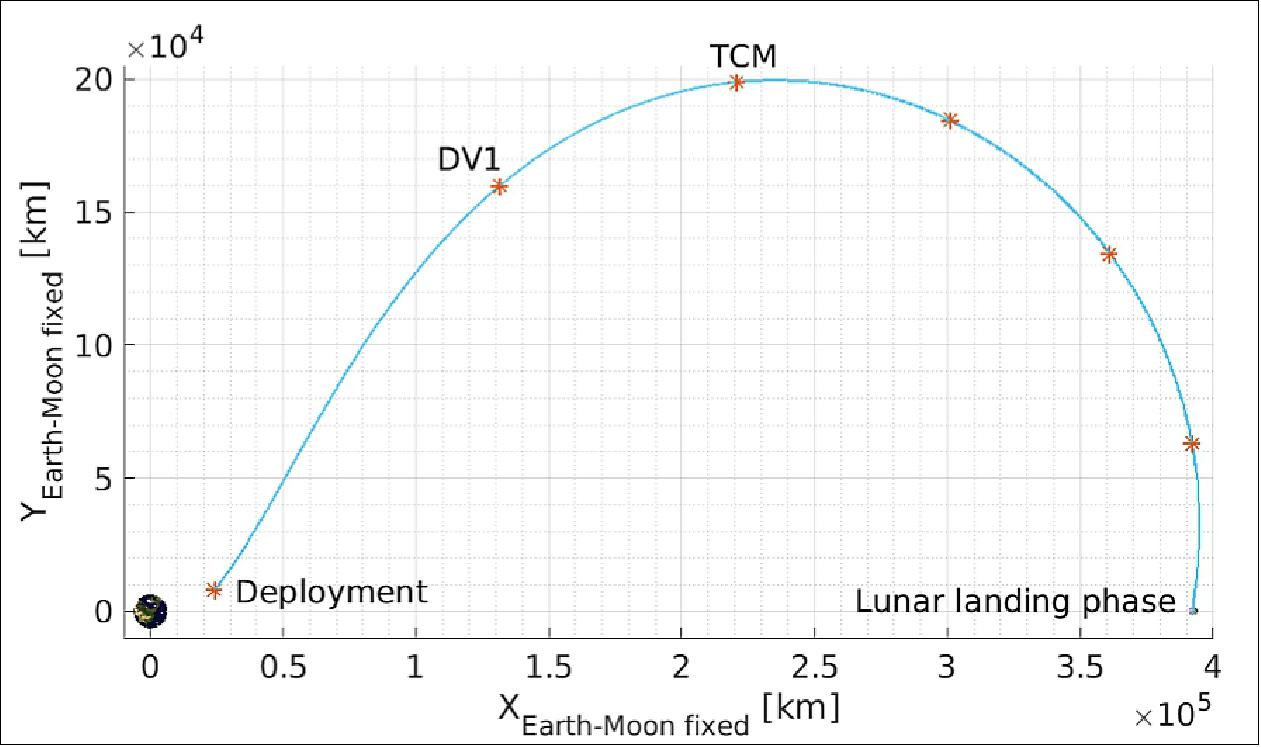
After detaching from the SLS, OMOTENASHI must perform two deterministic maneuvers that will make this CubeSat the first one to perform a semi-hard landing on the Moon. A first maneuver, DV1 (Deceleration ΔV 1), will inject OMOTENASHI into a Moon-impacting orbit. After performing midcourse TCMs (Trajectory Correction Maneuvers) as needed, a solid rocket motor will be ignited shortly before the expected Lunar surface collision at a speed of approximately 2.5 km/s. After the deceleration maneuver (DV2), OMOTENASHI will experience a free-fall from a low height (close to 100 m) and arrive at the Moon surface with a speed of around 20 m/s. 25) 26)
Spacecraft
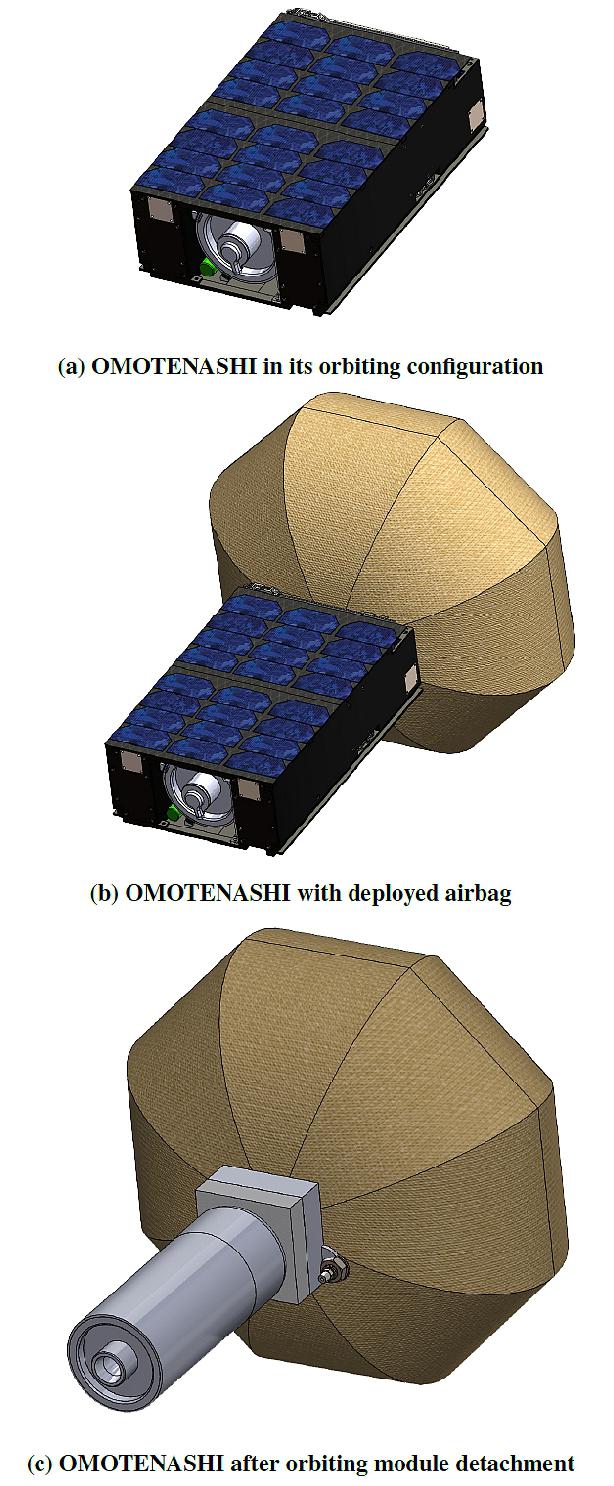
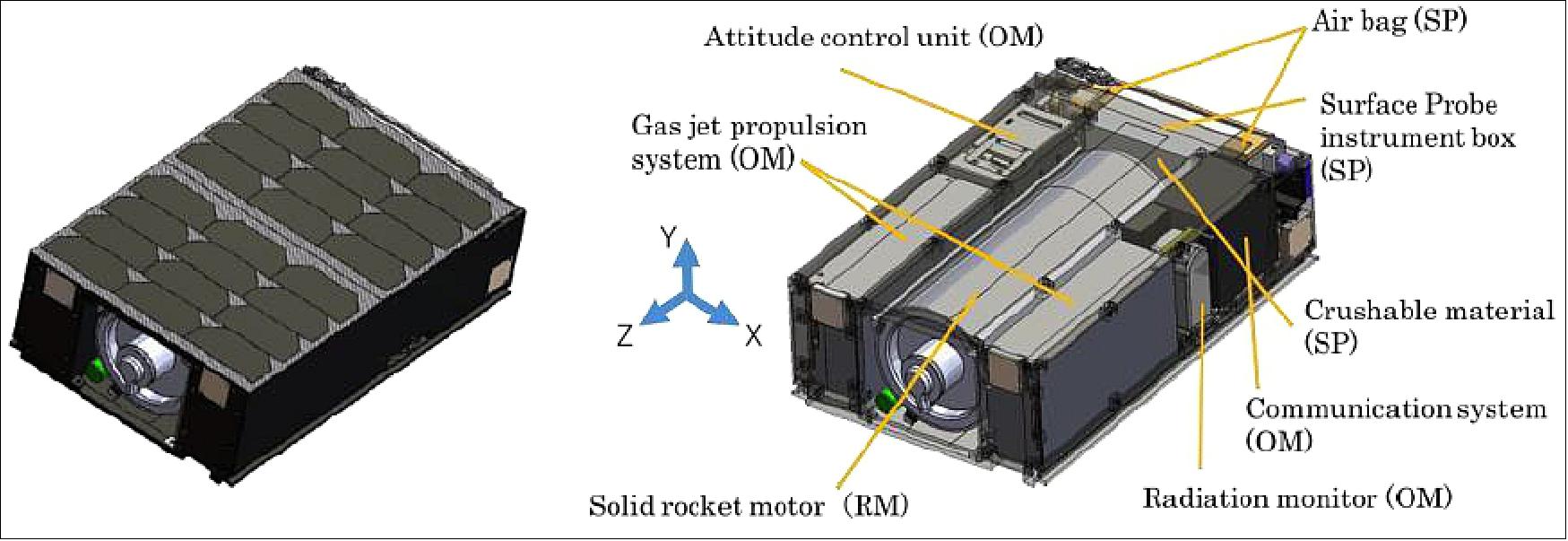
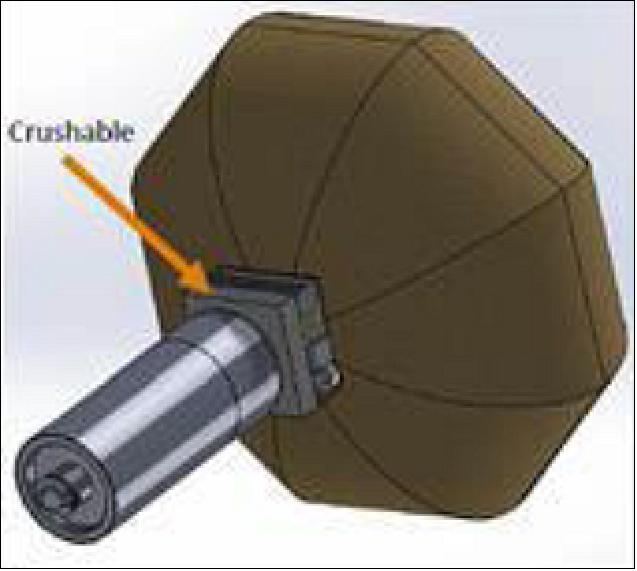
In order to reduce the mass budget, OMOTENASHI is composed of an orbiting module, a retromotor module and a surface probe. The orbiting module must be ejected at rocket motor ignition to achieve the required deceleration. Finally, the surface probe will separate from the retromotor module at burnout to reduce the load on the energy absorption mechanisms.
Figure 24 shows the current state of the design of the spacecraft for different parts of the mission. On the top, Figure 24a shows the orbiting configuration of OMOTENASHI, featuring solar arrays in the +Y face. The solid rocket motor, including its sealing lid, is also visible. Before DV2, OMOTENASHI will deploy its airbag as can be seen in Figure 24b. The orbiting module is ejected after the solid rocket motor ignition, being the configuration during the deceleration maneuver as shown in Figure 24c.
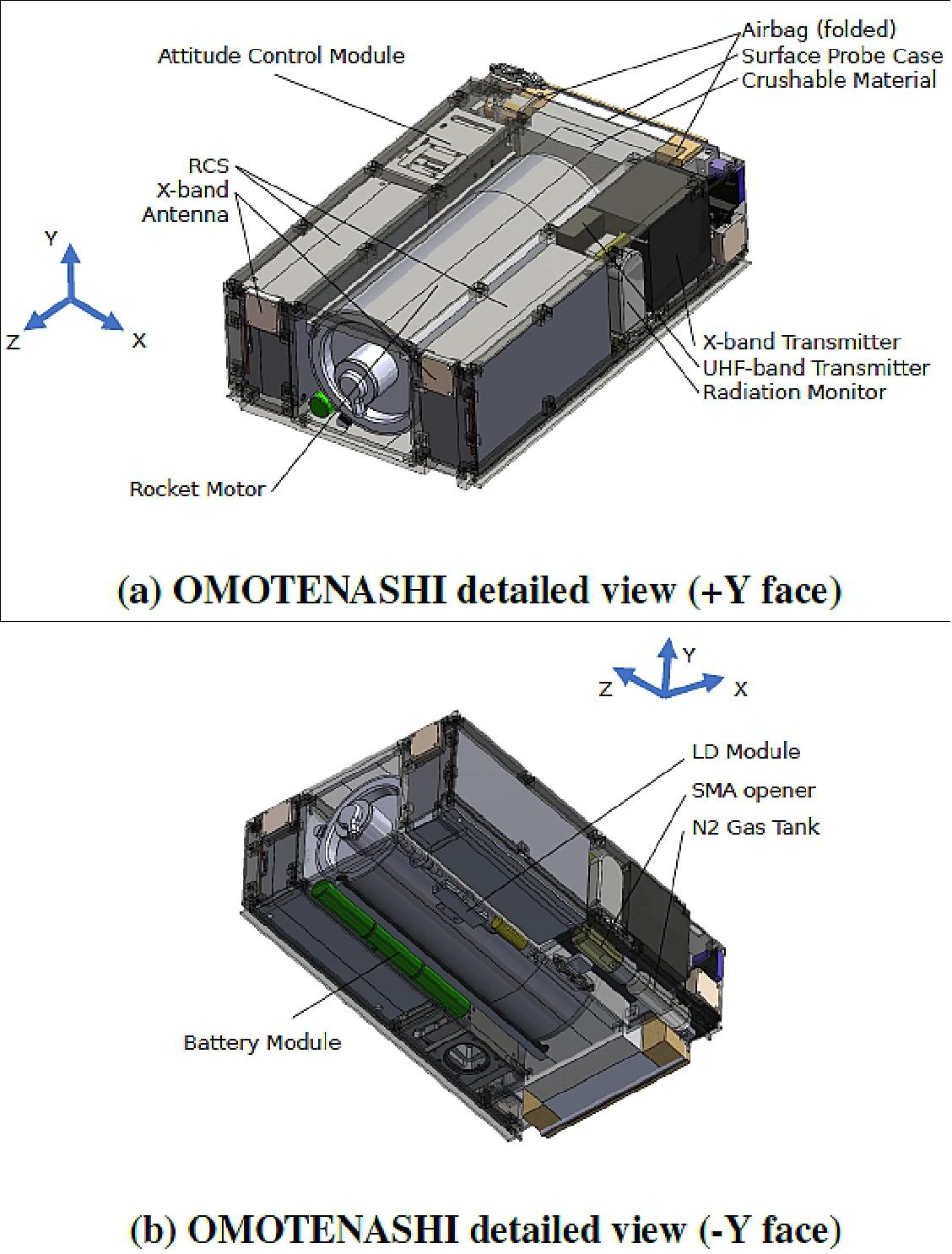
A detailed view of the internal parts of OMOTENASHI is presented in Figure26. Figure 26a shows the RCS (Reaction Control System), attitude control module, communication devices, rocket motor and surface probe. Looking from a different angle, Figure 26b shows the battery module, the laser diode (LD) used to ignite the motor, and the devices in charge of inflation of the airbag: CO2 gas tank and shape memory allow (SMA) opener.
Trajectory overview
OMOTENASHI introduces a unique approach for lunar landing. Traditionally, lunar landing missions are characterized by an Earth-Moon transfer and lunar orbit insertion, followed by the descent, hovering and landing phases. This approach allows for a flexible design, as the errors in all phases can be detected and corrected, but requires a full set of sensors and a large, restartable propulsion systems, both of which are not available to small satellites. OMOTENASHI combines the maneuvers for the lunar orbit insertion, descent and landing into a single maneuver executed by a solid rocket motor, followed by a free-fall onto the lunar surface with impact speed on the order of 30 m/s. If proven to work, the OMOTENASHI approach will enable an entirely new class of lunar exploration missions by small satellites, also exploiting more ride-share opportunities from the planned Lunar Orbital Platform-Gateway.
In order to design a trajectory that leads to a safe semi-hard landing on the surface of the moon, the trajectory is divided in two arcs: the transfer and the landing phase.
During the transfer phase, OMOTENASHI must modify its orbit from the Moon fly-by injection orbit to a Moon intersection orbit. 28) Additionally, health check-ups and orbit determination are key aspects of this phase. OD (Orbit Determination) is a critical resource during the first hours of operation, as the 13 delivered cubesats have the same need of accurately assessing the orbit they are flying, and the time before the Moon fly-by/arrival is limited. During the trajectory design process, this was identified as one of the key aspects that the small satellite community should address in the near future.
The landing phase starts minutes before arriving at the Moon surface, and the main event is the deceleration of the spacecraft by the use of a solid rocket motor. 29) Another important aspect is that in order to successfully deliver the required deceleration ΔV , the orbiter module will be detached from the rest of the spacecraft to reduce the mass to be decelerated.
In the absence navigation and maneuver execution errors, any Moon-intersecting trajectory would lead to a successful landing, provided that the surface probe can absorb the residual kinetic energy after braking. However, the uncertainty on the actual trajectory introduces very strong constraints between the two phases.
From the point of view of a safe landing, a trajectory with a very shallow FPA is preferred to minimize the effect of timing errors on the vertical displacement of the spacecraft. A high position error on the vertical direction may lead to a premature landing during the solid rocket motor burn, jeopardizing the mission. On the other hand, a very shallow FPA might cause missing the Moon in the presence of errors. To reduce the fly-by probability, a TCM may be introduced if necessary. A TCM must be carefully planned in order not to hinder the orbit accuracy during the landing, as it reduces the time to perform OD before the landing phase.
The current analysis and design were conducted with the initial conditions provided by NASA/MSFC (Marshall Space Flight Center) 30) and shown in Table 1. The position and velocity components are expressed in a Moon-centered reference frame whose axes are parallel to the J2000 Ecliptic frame. We considered the Sun, Earth and Moon Gravity as point masses and an impulsive DV1 maneuver. In the future solar radiation pressure, spherical harmonics and finite burns will be included, but the results will not qualitatively change.
Epoch | 2018 Oct 07 15:39:16 |
x (km) | 341,095.06 |
y (km) | -43,570.46 |
z (km) | -18,326.52 |
vx (km/s) | -3.59 |
vy (km/s) | -2.71 |
vz (km/s) | 0.98 |
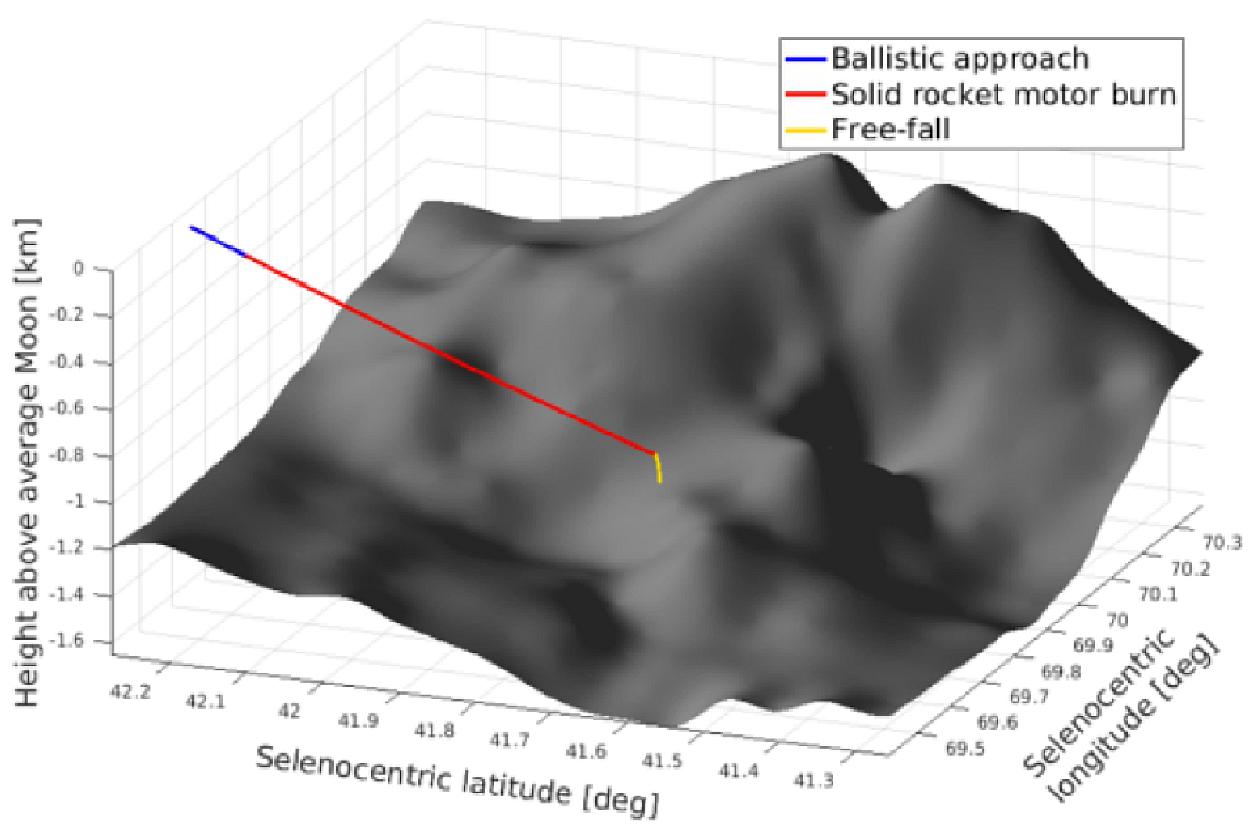
Figure 27 shows the transfer trajectory in an Earth-centered frame that rotates with the Moon. Figure 28 shows the landing phase trajectory, including the deceleration and final free-fall. One day after separation, Δv1 is executed by a cold-gas jet system to correct for launcher dispersions errors and to target a lunar landing orbit, with shallow flight path angle at approach on a visible landing site. Depending on the launch geometry, Δv1 can be 5-16 m/s; a trajectory correction maneuver is also planned to correct for Δv1 execution errors and knowledge errors. Shortly before impact, the solid motor executes a maneuver of about 2500 m/s to bring the spacecraft almost to a stop, which is followed by a free fall onto the lunar surface. The semi-hard landing is enabled by a shock absorption mechanisms which allows up to 30 m/s impact vertical velocity, corresponding to a few hundreds meters of free fall.
OD (Orbit Determination)
Navigation accuracy plays a critical role in the success of a lunar lander like OMOTENASHI. In the first place, the strong FPA constraints at Moon arrival demand a precise knowledge of the state vector of the satellite at DV1. Moreover, vertical position errors during landing may lead to an early impact with the Moon while the solid motor rocket maneuver is being performed. Timing errors during landing could also jeopardize the mission, even if the approach trajectory is characterized by a small FPA.
Moreover, the actual trajectory has a strong influence in the position accuracy at Moon arrival. We observed differences up to one order of magnitude in the vertical position error at landing when following different orbits for the same tracking strategy. However, a small-satellite operator has in most cases limited control over the orbit he is being deployed into. Thus, great care must be taken when designing the OD strategy to be employed.
In summary, the design of the transfer phase, including a cold gas maneuver to target the Moon and a trajectory correction maneuver, was introduced. After the transfer phase, a deceleration maneuver using a solid rocket motor, reaching a final zero vertical-velocity and a specified height over the Moonsurface, will be followed by a ballistic free-fall.
All error sources were identified and characterized. Deviations from the nominal trajectory were studied and the most critical contributions were determined, which in turn allows to propose requirements to the design of the related subsystems in order to increase the success rate of the transfer and landing phases of OMOTENASHI.
The analysis of the landing phase shows the need of a trajectory correction maneuver to compensate for execution errors of the deterministic maneuver. Orbit Determination requirements can also be drawn from this study, and we determined that OMOTENASHI must request support from international partners in order to use their ground stations for a safe landing.
Simulation results of the landing phase identify several critical error sources that should be further studied in order to increase the landing success rate: structural limit of the landing devices and accuracy of attitude and solid rocket engine. This is currently being considered by the OMOTENASHI team. Additionally, we found that employing DDOR (Delta-Differential One-way Ranging) tracking is paramount to reduce the vertical position error at Moon landing, which could jeopardize the mission.
The effect of the flight path angle at Moon arrival was also studied. It was found that for this kind of mission it is necessary to design a shallow flight path angle trajectory, shallower than -7º. This imposes constraints on the design of the transfer phase, which becomes strongly coupled with the landing phase.
In future work, and before OMOTENASHI is launched, there are some additional tasks that OMOTENASHI trajectory team must address in their work. This includes further refinement of the dynamical model (i.e. including spherical harmonics, finite thrust burns for the cold gas thruster and solar radiation pressure). In addition, the robustness of the entire trajectory should be studied, since in the present work they are analyzed separately.
OMOTENASHI: Mission Sequence
• Total of 2 orbital maneuvers, DV1, DV2
• Attitude spin maneuver before deceleration
• Deceleration until “some” (~100-200 m) altitude above the lunar surface
• Free fall to the surface with low vertical speed.
Parameters of the OMOTENASHI spacecraft: 31)
• Total mass of spacecraft: 14 kg
• Orbiting Module (OM) = 8.6 kg (excl. RM and SP). OM carries all spacecraft bus and payloads
• Retro Motor: 4.4 kg (excl. OM and SP)
• RM is the solid motor that decelerates the CubeSat to the lunar surface.
Note: In the current design Surface probe is not separated from the solid rocket motor, though it will be separated by the impact shock. Current maximum impact velocity will be about 50 m/s. 32)
SP carries the landing structure and the transponder for communication (P-band), along with OBC and Power system (Li – 18 Wh).
Overview of secondary payloads on the Artemis-1 mission (formerly Orion/EM-1)
The first flight of NASA’s new rocket, SLS ( Space Launch System), will carry 13 CubeSats/Nanosatellites to test innovative ideas along with an uncrewed Orion spacecraft in 2020. These small satellite secondary payloads will carry science and technology investigations to help pave the way for future human exploration in deep space, including the journey to Mars. SLS’ first flight, referred to as EM-1 (Exploration Mission-1 ), provides the rare opportunity for these small experiments to reach deep space destinations, as most launch opportunities for CubeSats are limited to low-Earth orbit. 33) 34)
The secondary payloads, 13 CubeSats, were selected through a series of announcements of flight opportunities, a NASA challenge and negotiations with NASA’s international partners.
NASA selected two payloads through the NextSTEP (Next Space Technologies for Exploration Partnerships) Broad Agency Announcement of May 5, 2015:
• LunIR ⟨originally called Skyfire) - Lockheed Martin Space Systems Company, Denver, Colorado, will develop a 6U CubeSat to perform a lunar flyby of the moon, taking sensor data during the flyby to enhance our knowledge of the lunar surface. LunIR will test a new technology mid-wave infrared camera and micro-cryocooler. LunIR also includes a visible imager.
• Lunar IceCube - Morehead State University, Kentucky, will build a 6U CubeSat to search for water ice and other resources at a low orbit of only 62 miles above the surface of the moon. This CubeSat will orbit the Moon and prospect for water and other volatiles in lunar regolith using BIRCHES (Broadband Infrared Compact High-Resolution Exploration Spectrometer) developed at NASA/GSFC.
Three payloads were selected by NASA’s Human Exploration and Operations Mission Directorate:
• NEA Scout (Near-Earth Asteroid Scout), the 6U CubeSat of NASA/MSFC/JPL will perform reconnaissance of an asteroid, take pictures and observe its position in space
• BioSentinel - a 6U CubeSat of NASA/ARC will use yeast to detect, measure and compare the impact of deep space radiation on living organisms over long durations in deep space.
• Lunar Flashlight - a 6U CubeSat of NASA/JPL/MSFC will look for ice deposits and identify locations where resources may be extracted from the lunar surface
Two payloads were selected by NASA’s Science Mission Directorate:
• CuSP – a 6U CubeSat of the SwRI (Southwest Research Institute) “space weather station” to measure particles and magnetic fields in space, testing the practicality for a network of stations to monitor space weather
• LunaH-Map a 6U CubeSat of Arizona State University will map hydrogen within craters and other permanently shadowed regions throughout the moon’s south pole.
Three additional payloads were determined through NASA’s Cube Quest Challenge – sponsored by NASA’s Space Technology Mission Directorate and designed to foster innovations in small spacecraft propulsion and communications techniques. CubeSat builders will vie for a launch opportunity on SLS’ first flight through a competition that has four rounds, referred to as ground tournaments, leading to the selection in 2017 of the payloads to fly on the mission.
• Cislunar Explorers, Cornell University, Ithaca, New York. Cislunar Explorers’ concept consists of a pair of spacecraft on a mission to orbit the moon. These two spacecraft are mated together as a 6U CubeSat. After deployment from the launch vehicle, they will split apart and each give their initial rotation in the process of decoupling.
• CU-E3(CU Earth Escape Explorer), a 6U CubeSat of the University of Colorado in Boulder, CO. The CU-E3 mission will use a lunar gravity assist maneuver to place the CubeSat in a heliocentric orbit that trails the Earth at a distance > 1AU (Astronomical Unit). The distance between the Earth and the spacecraft will gradually increase over time, reaching 27 million km by the end of its one-year mission.
• Team Miles, Team Miles is led by the company Fluid and Reason LLC. Team Miles is a group of citizen scientists and engineers that initially came together through Tampa Hackerspace in Florida – all participants in the community, nonprofit workshop. Team Miles is a 6U CubeSat to demonstrate navigation in deep space using innovative plasma thrusters. Use of a software defined S-band radio to communicate with Earth.
NASA has also reserved three slots for payloads from international partners. These are: 36)
• EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) of ISSL (Intelligent Space Systems Laboratory) of the University of Tokyo and JAXA. EQUULEUS will help scientists understand the radiation environment in the region of space around Earth by imaging Earth’s plasmasphere and measuring the distribution of plasma that surrounds the planet. This opportunity may provide important insight for protecting both humans and electronics from radiation damage during long space journeys. It will also demonstrate low-energy trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon region.
• OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) of JAXA. JAXA will use the OMOTENASHI to demonstrate the technology for low-cost and very small spacecraft to explore the lunar surface. This technology could open up new possibilities for future missions to inexpensively investigate the surface of the moon. The CubeSat will also take measurements of the radiation environment near the moon as well as on the lunar surface.
• ArgoMoon. The Italian company Argotec is building the ArgoMoon CubeSat under the Italian Space Agency (ASI) internal review and approval process. ArgoMoon will demonstrate the ability to perform operations in close proximity of the ICPS ( Interim Cryogenic Propulsion Stage), which will send Orion onto its lunar trajectory. It should also record images of the ICPS for historical documentation and to provide valuable mission data on the deployment of other CubeSats. Additionally, this CubeSat should test optical communication capabilities between the CubeSat and Earth.
All the CubeSats will ride to space inside the Orion Stage Adapter, which sits between the ICPS ( Interim Cryogenic Propulsion Stage) and Orion (Figure 33). The cubesats will be deployed following Orion separation from the upper stage and once Orion is a safe distance away.
The SPIE ( Spacecraft and Payload Integration and Evolution) office is located at NASA/MSFC (Marshall Space Flight Center) in Huntsville, Alabama, which handles integration of the secondary payloads.
These small satellites are designed to be efficient and versatile—at no heavier than 14 kg, they are each about the size of a boot box, and do not require any extra power from the rocket to function. The science and technology experiments enabled by these small satellites may enhance our understanding of the deep space environment, expand our knowledge of the moon, and demonstrate technology that could open up possibilities for future missions. 37)
A key requirement imposed on the EM-1 secondary payload developers is that the smallsats do not interfere with Orion, SLS or the primary mission objectives. To meet this requirement, payload developers must take part in a series of safety reviews with the SLS Program’s Spacecraft Payload Integration & Evolution (SPIE) organization, which is responsible for the Block 1 upper stage, adapters and payload integration. In addition to working with payload developers to ensure mission safety, the SLS Program also provides a secondary payload deployment system in the OSA (Orion Space Adapter). The deployment window for the CubeSats will be from the time ICPS disposal maneuver is complete (currently estimated to require about four hours post-launch) to up to 10 days after launch. 38)
References
1) ”EQUULEUS - From Japan to EML2,” URL: http://issl.space.t.u-tokyo.ac.jp/equuleus/en/
2) Stefano Campagnola, Javier Hernando-Ayuso, Kota Kakihara, Yosuke Kawabata, Takuya Chikazawa, Ryu Funase, Naoya Ozaki, Nicola Baresi, Tatsuaki Hashimoto, Yasuhiro Kawakatsu, Toshinori Ikenaga, Kenshiro Oguri, Kenta Oshima, ”Mission analysis for the EM-1 CubeSats EQUULEUS and OMOTENASHI,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-B4.8.2, URL: https://iafastro.directory/iac/proceedings
/IAC-18/IAC-18/B4/8/manuscripts/IAC-18,B4,8,2,x45356.pdf
3) ”International Partners Provide Science Satellites for America’s Space Launch System Maiden Flight,” NASA, May 26, 2016, URL: https://www.nasa.gov/exploration/
systems/sls/international-partners-provide-cubesats-for-sls-maiden-flight
4) Christopher Moore, Jitendra Joshi, Nicole Herrmann, ”Deep-Space CubeSats on Exploration Mission -1,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17-B4.8
5) Ryu Funase, Satoshi Ikari, Yosuke Kawabata, Shintaro Nakajima, Shunichiro Nomura, Kota Kakihara, Ryohei Takahashi, Kanta Yanagida, Shuhei Matsushita, Akihiro Ishikawa, Nobuhiro Funabiki, Yusuke Murata, Ryo Suzumoto, Toshihiro Shibukawa, Daiko Mori, Masahiro Fujiwara, Kento Tomita, Hiroyuki Koizumi, Jun Asakawa, Keita Nishii, Ichiro Yoshikawa, Kazuo Yoshioka, Takayuki Hirai, Shinsuke Abe, Ryota Fuse, Masahisa Yanagisawa, Kota Miyoshi, Yuta Kobayashi, Atsushi Tomiki, Wataru Torii, Taichi Ito, Masaki Kuwabara, Hajime Yano, Naoya Ozaki, Toshinori Ikenaga, Tatsuaki Hashimoto, ”Flight Model Design and Development Status of the Earth―Moon Lagrange Point Exploration CubeSat EQUULEUS Onboard SLS EM-1,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-VII-05, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=4109&context=smallsat
6) ”EQUULEUS Trajectory Control Demonstration within Sun-Earth-Moon Region,” URL: https://web.archive.org/web/20230327093145/https://www.space.t.u-tokyo.ac.jp/equuleus/en/mission/technology-demonstration/
7) Kenta Oshima, Stefano Campanola, Chit Hong Yam, Yuki Kayama, Yasuhiro Kawakatsu, Naoya Ozaki, Quentin Verspieren, Kota Kakihara, Kenshiro Oguri, Ryu Funase, ”EQUULEUS Mission Analysis: Design of the Transfer Phase,” 31st ISTS conference paper, June 2017, URL: https://www.researchgate.net/profile/Kenta_Oshima/publication/
317561222_EQUULEUS_Mission_Analysis_Design_of_the_Transfer_Phase/links/
5940c94daca2723712252104/EQUULEUS-Mission-Analysis-Design-of-the-Transfer-Phase.pdf?
origin=publication_detail
8) S. Campagnola, N. Ozaki, Y. Sugimoto, C. C. H. Yam, H. Chen, S. Ogura, B. Sarli, Y. Kawakatsu, R. Funase, S. Nakasuka, Y. Sugimoto, Y., Kawakatsu, H. Chen, Y. Kawabata, ”Low-Thrust trajectory design and operations of procyon, the first deep-space micro-spacecraft," 24th International Symposium on Space Flight Dynamics, Munich, Germany, Vol. 7, 2015. ISSN 00741795.
9) Jun Asakawa, Hiroyuki Koizumi, Keita Nishii, Naoki Takeda, Masaya Murohara, Ryu Funase, Kimiya Komurasaki, ”Fundamental Ground Experiment of a Water Resistojet Propulsion System: AQUARIUS Installed on a 6U CubeSat: EQUULEUS,” Transactions of the Japan Society for Astronautical and Space Sciences, Aerospace Technology Japan, Volume 16, Issue 5, pp: 427-431, 2018, https://doi.org/10.2322/tastj.16.427, URL: https://www.jstage.jst.go.jp/article/tastj/16/5/16_427/_pdf/-char/en
10) Jennifer Harbaugh, ”Two More Artemis I Deep Space CubeSats Prepare for Launch,” NASA Artemis, 27 July 2021, URL: https://blogs.nasa.gov/artemis/2021/07/27/
two-more-artemis-i-deep-space-cubesats-prepare-for-launch/
11) Philip Sloss, ”EM-1 Update: Making progress, but still behind schedule,” NASA Spaceflight.com, 3 April 2018, URL: https://www.nasaspaceflight.com/2018/04/em-1-update-progress-still-behind-schedule/
12) ”EQUULEUS - From Japan to EML2,” URL: https://web.archive.org/web/20230630174921/https://www.space.t.u-tokyo.ac.jp/equuleus/en/
13) ”Plasmaspheric Helium ion Observation by Enhanced New Imager in eXtreme ultraviolet,” URL: [web source no longer available]
14) Satoshi Ikari, Masahiro Fujiwara, Hirotaka Kondo, Shuhei Matsushita, Ichiro Yoshikawa, Kazuo Yoshioka, Reina Hikida, Yosuke Kawabata, Shintaro Nakajima, Ryu Funase, Masaki Kuwabara, Hajime Yano, Kota Miyoshi, Tatsuaki Hashimoto, Masahisa Yanagisawa, Kenji Yamamoto, Ryuji Shimada, Takayuki Hirai, Haruki Nakano, Kosuke Kando, Kazuyoshi Arai, Masayuki Fujii, ”Solar System Exploration Sciences by EQUULEUS on SLS EM-1 and Science Instruments Development Status,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-WKV-04, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4399&context=smallsat
15) Ryu Funase, Takaya Inamori, Satoshi Ikari, Naoya Ozaki, Shintaro Nakajima, Kaito Ariu, Hiroyuki Koizumi, Shingo Kameda, Atsushi Tomiki, Yuta Kobayashi, Taichi Ito, Yasuhiro Kawakatsu, ”One-year Deep Space Flight Results of the World’s First Full-scale 50-kg-class Deep Space Probe PROCYON and Its Future Prospects,” Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-III-05, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=3348&context=smallsat
16) Nobuaki Kawai, Kenji Tsurui, Sunao Hasegawa, and Eiichi Sato, ”Single microparticle launching method using two-stage light-gas gun for simulating hypervelocity impacts of micrometeoroids and space debris,” Review of Scientific Instruments, Vol. 81, Issue 11, 5105 (2010), https://doi.org/10.1063/1.3498896
17) Ritsuko Jitsukawa, Takayuki Hirai, Hajime Yano, Kazuyoshi Arai,Keith Nelson, ”Computational and Experimental Prediction for Detection of Two Dust Populations in the Earth-Lunar Lagrange 2 Point by the EQUULEUS-CLOTH system,” 42nd COSPAR Scientific Assembly. Held 14-22 July 2018, in Pasadena, California, USA
18) Ryota Fuse, "The study of the space based observation of lunar impact flashes", 31st ISTS (International Symposium on Space Technology and Science), paper: 2017-s-15-k, Matsuyama, Japan, 3-9 June 2017
19) https://web.archive.org/web/20180929233158/https://www.space.t.u-tokyo.ac.jp/equuleus/en/mission/delphinus/
20) L. Mohon, ”Lunar Impacts,” NASA, URL: https://www.nasa.gov/centers/marshall/news/lunar/lunar_impacts.html
21) Ryota Fuse, Shinsuke Abe, Masahisa Yanagisaw, ”Space-based Observation of Lunar Impact Flashes,” Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology Japan, Vol.17, pp. 315-320, 2019
22) Ana M. Cipriano, Diogene A. Dei Tos, and Francesco Topputo, ”Orbit design for LUMIO: The lunar meteoroid impacts observer,” Frontiers in Astronomy and Space sciences, Vol. 5, 19 September 2018, pp. 1-23, https://doi.org/10.3389/fspas.2018.00029
23) M. Fujiwara, S. Ikari, H. Kondo, et al.,”Development of On-board Image Processing Algorithm to Detect Lunar Impact Flashes for DELPHINUS,” Proceedings on 32nd ISTS, Fukui, Japan, 2019
24) Javier Hernando-Ayuso, Yusuke Ozawa, Shota Takahashi, Stefano Campagnola, Toshinori Ikenaga, Tomohiro Yamaguchi, Tatsuaki Hashimoto, Chit Hong Yam, Bruno V. Sarli, ”Trajectory Design for the JAXA Moon Nano-Lander OMOTENASHI,” Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 5-10, 2017, paper: SSC17-III-07, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3615&context=smallsat
25) T. Hashimoto, T. Yamada, J. Kikuchi, M. Otsuki, T. Ikenaga, ”Nano Moon Lander: OMOTENASHI,” 31st ISTS (International Symposium on Space Technology and Science), paper: 2017-f-053, Matsuyama, Japan, 3-9 June 2017
26) S. Campagnola, N. Ozaki, J. Hernando-Ayuso, K. Oshima,T. Yamaguchi, K. Oguri,Y. Ozawa, T. Ikenaga, K. Kakihara, S. Takahashi, R. Funase, Y. K. T. Hashimoto, “Mission Analysis for EQUULEUS and OMOTENASHI”, 31st ISTS (International Symposium on Space Technology and Science), paper: 2017-f-044, Matsuyama, 3-9 June Japan, 2017.
27) http://www.isas.jaxa.jp/home/omotenashi/posts/news1.html
28) Y. Ozawa, S. Takahashi, J. Hernando-Ayuso, S. Campagnola, T. Ikenaga, T. Yamaguchi, B. Sarli, “OMOTENASHI Trajectory Analysis and Design: Earth-Moon Transfer Phase”, 31st ISTS (International Symposium on Space Technology and Science), paper: 2017-f-054, Matsuyama, Japan, 3-9 June 2017.
29) J. Hernando-Ayuso, S. Campagnola, T. Ikenaga, T. Yamaguchi, Y. Ozawa, B. V. Sarli, S. Takahashi, C. H. Yam, “OMOTENASHI Trajectory Analysis and Design: Landing Phase”, 26th International symposium on Space Flight Dynamics, held together the 31st ISTS (International Symposium on Space Technology and Science), paper: 2017-d-050, Matsuyama, Japan, 3-9 June 2017
30) R. Stough, “REVISED - Delivery of Interim October 7th 2018 Launch Post ICPS Disposal State Vectors for Secondary Payload Assessment”, Technical report, George C. Marshall Space Flight Center, NASA, 2016
31) Onur Çelik, Tatsuaki Hashimoto, Ryu Funase, Yasuhiro Kawakatsu, Stefano Campagnola, Toshinori Ikenaga,”Overview of Japanese Lunar CubeSats OMOTENASHI & EQUULEUS,” UN/South Africa Symposium on Basic Space Technology, Stellenbosch, South Africa, 11-15 December 2017, URL: http://www.unoosa.org/documents/pdf/psa/activities/2017/SouthAfrica/slides/Presentation21.pdf
32) Information provided by Tatsuaki Hashimoto of JAXA
33) Kathryn Hambleton, Kim Newton, / Shannon Ridinger, ”NASA Space Launch System’s First Flight to Send Small Sci-Tech Satellites Into Space,” NASA Press Release 16-011, Feb. 2, 2016, URL: http://www.nasa.gov/press-release/
nasa-space-launch-system-s-first-flight-to-send-small-sci-tech-satellites-into-space
34) Christopher Moore, Jitendra Joshi, Nicole Herrmann, ”Deep-Space CubeSats on Exploration Mission-1,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper:IAC-17-B4.8
35) ”Three DIY CubeSats Score Rides on NASA’s First Flight of Orion, Space Launch System,” NASA Release 17-055, 8 June 2017, URL: https://www.nasa.gov/press-release/
three-diy-cubesats-score-rides-on-nasa-s-first-flight-of-orion-space-launch-system
36) Kathryn Hambleton, Kim Henry, Tracy McMahan, ”International Partners Provide Science Satellites for America’s Space Launch System Maiden Flight,” NASA, 26 May 2016 and update of 07 February 2018, URL: https://www.nasa.gov/exploration/systems/sls/
international-partners-provide-cubesats-for-sls-maiden-flight
37) ”Smallsats Of Scientific Persuasions To Be Supplied By International Partners To NASA For The Maiden Flight Of SLS,” Satnews Daily, May 31, 2016, URL: http://www.satnews.com
/story.php?number=1735749470
38) Kimberly F. Robinson, Scott F. Spearing, David Hitt, ”NASA’s Space Launch System: Opportunities for Small Satellites to Deep Space Destinations,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-IX-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4119&context=smallsat
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).