FedSat (Federation Satellite)
EO
Mission complete
Magnetic field
Gravity and Magnetic Fields
Quick facts
Overview
| Mission type | EO |
| Agency | CSIRO, CRCSS |
| Mission status | Mission complete |
| Launch date | 14 Dec 2002 |
| End of life date | 14 Dec 2005 |
| Measurement domain | Gravity and Magnetic Fields |
| Measurement category | Gravity, Magnetic and Geodynamic measurements |
| Measurement detailed | Magnetic field (scalar), Magnetic field (vector) |
| Instruments | Communications payload (Ka and UHF band), GPS receiver, Fluxgate magnetometer |
| Instrument type | Magnetic field, Communications, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See FedSat (Federation Satellite) summary |
FedSat (Federation Satellite)
FedSat is an Australian microsatellite to commemorate the centenary celebration of Australian Federation in 2001. The program is managed by CRCSS (Cooperative Research Center for Satellite Systems), established January 1, 1998. The Center comprises the Australian research body CSIRO (Commonwealth Science and Industrial Research Organization), the University of South Australia, the Queensland University of Technology, University of Technology, Sydney, Auspace Limited, Vipac Engineers and Scientists Ltd, and the University of Newcastle.
The specific mission of CRCSS is to promote Australian space research and to create a favorable and sustainable environment for Australian industry, government agencies and universities, involved in services, applications, and research. As of 2000, there are more than sixty CRCs (Cooperative Research Centers) in Australia active in engineering, science, medicine, and technology. The main objectives of the FedSat mission are in the fields of: communications, space science, satellite systems, navigation, engineering research, and education/training. 1) 2) 3) 4)
Spacecraft
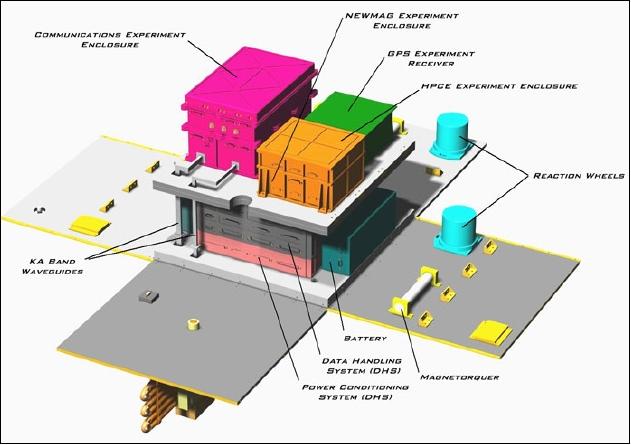
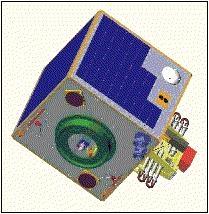
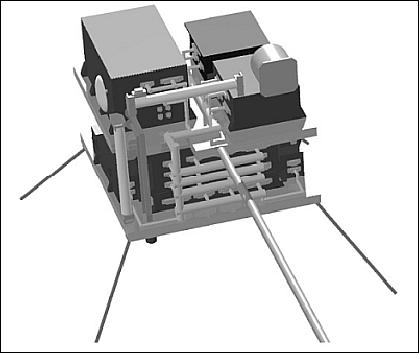
The S/C structure resembles a cube of 60 cm side length and is based on a variant of the standard MicroSIL bus, built by SIL (Space Innovations Limited) of Newburry, Berks, UK, a commercial platform provider (SSTL of Surrey purchased SIL as of 2000). The design is based around six honeycomb outer panels, and an interior double shelf, dividing the platform subsystems on the lower shelf from the payload instruments on the top shelf.
FedSat is three-axis stabilized. The S/C attitude is measured by three digital sun sensors (linear array of 256 photodiodes), a star camera (CCD device), and a three-axis fluxgate magnetometer. Attitude is controlled by three precision reaction wheels, three magnetorquers, and three solid-state rate gyros as actuators. The attitude knowledge accuracy is ±1º. The ACS (Attitude Control System) is provided by CSA (Canadian Space Agency) and built by Dynacon Enterprises Ltd. of Mississauga, Ontario. In addition, there is a gravity-gradient boom pointing toward nadir.
Spacecraft power (60 W max) is provided by surface-mounted solar cells (19 strings of GaAs cells on Ge substrates). In addition, there are 16 NiCd battery cells, each with a capacity of 6 Ah for eclipse phase operations. On-board data storage of 2.56 Gbit is provided. The S/C mass is 58 kg. The S/C design life is three years with a goal of five years of operations. 5) 6) 7) 8)
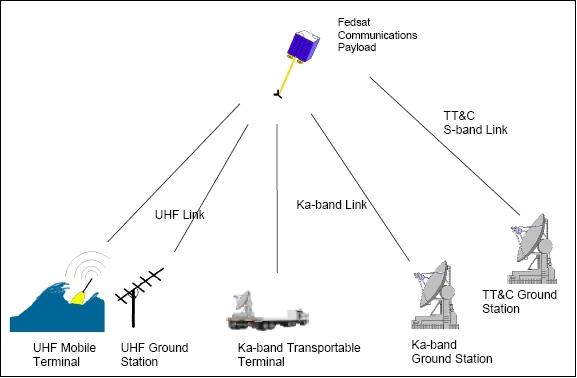
RF communications: The S/C features two S-band patch antennas, plus a UHF quarter-wave whip, and Ka-band isoflux antenna. The S-band transmitter has an output power of 2 W. Uplink frequency: 2205-2290 MHz, downlink frequency within 2200-2290 MHz. Downlink data rates of up to 1 Mbit/s are supported. Suppressed carrier BPSK modulation is employed. The onboard receiver accepts telecommand data, BPSK modulated, on to a subcarrier, with uplink rates between 8 bit/s to 4 kbit/s.
Redundancy is provided through the communications payload/experiment (CPE), with a UHF uplink at 4 kbit/s, and a Ka-band downlink with 125 kbit/s or 250 kbit/s capability. The communications protocol is known as the Packet Utilization Standard. It is basically an ESA augmentation of CCSDS.
Spacecraft operations are provided by CRCSS (Cooperative Research Center for Satellite Systems) through its participating organization ITR (Institute for Telecommunications Research) at the University of South Australia in Adelaide. All communications with the S/C are supported by one ground station, located at Adelaide, offering 2-3 passes per day.
Launch
A piggyback (secondary) launch of FedSat took place Dec. 14, 2002 on the H2A vehicle of JAXA (formerly NASDA) along with WEOS (Whale Ecology Observation Satellite System) of the Chiba Institute of Technology and MicroLabSat of JAXA. The primary payload of the launch was ADEOS-II of JAXA (formerly NASDA). 9)
Orbit: Sun-synchronous circular orbit, altitude = 780 km, inclination =98.76º, equator crossing time on ascending node at 10:30 AM.
Mission Status
• The FedSat spacecraft fell silent by the end of June 2006. With a design life of 3 years, FedSat finally ceased operations a full year later than expected and after completing ~20,000 orbits of the Earth. 10)
• The FedSat mission provided valuable experimental infrastructure and a wealth of scientific data that will continue to be of use. 11)
• The in-orbit commissioning phase of FedSat was completed in March 2003. 12)
Sensor Complement
CPE (Communications Payload/Experiment)
CPE was developed at ITR of UniSA (University of South Australia), Adelaide, CSIRO (Commonwealth Scientific and Industrial Research Organization) Industrial Physics, Sydney, and at UTS (University of Technology), Sydney. The objective is the study of new Ka- L-, and UHF-band techniques for communications and data delivery (modulation, coding and multiple access techniques, on-board data reduction, regeneration and processing). CPE introduces a new type of packet data service well suited to environmental data acquisition by a LEO satellite. By using two-way messaging techniques, including a custom multiple access scheme and error control, this payload permits much larger transmissions, plus control of the data acquisition platforms. The satellite includes UHF radio. 13)
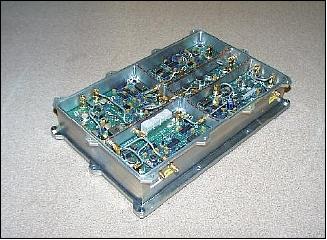
The Ka-band payload contains a circularly polarized receive (30 GHz) and transmit system (20 GHz), consisting of waveguide power combiners, couplers, polarizers and transitions. Rigorous analysis and design techniques were used to design all components. A compact multi-mode horn has a modified radiation pattern that distributes higher power at angles ± 50º from boresight to partially compensate for the increased path loss towards the edge of the Earth.
The following subsystems are part of the communications payload/experiment:
• BBP (Baseband Processor)
• Ka-band payload
• UHF payload.
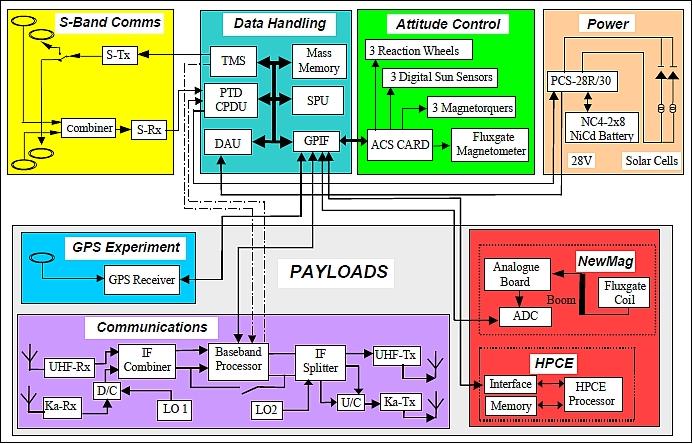
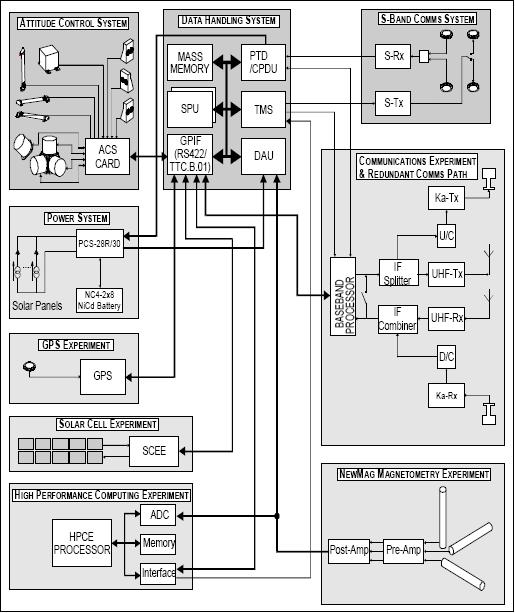
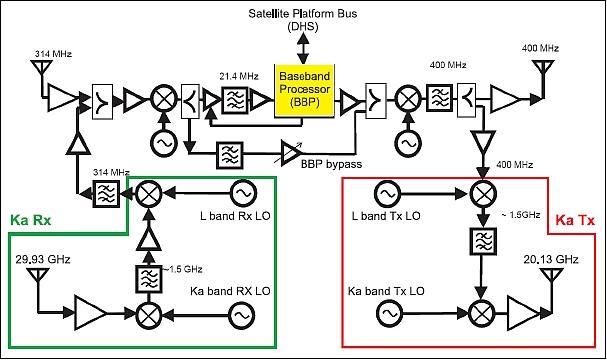
The block diagram of Figure 10 illustrates that both the BBP and the Ka band experiments share most of the UHF electronics on the intermediate frequencies of 314 MHz, 21.4 MHz and 400 MHz (Ref. 13).
ADAM (Advanced Data Acquisition and Messaging System)
ADAM was developed at ITR of UniSA. A portion of ADAM's functionality include the “old-fashioned” DCS (Data Collection System) services. - ADAM consists of a BBP (Baseband Processor) unit and a UHF transceiver unit. It provides the functionality of two-way packet communications for remote environmental monitoring and forward messaging. 14)
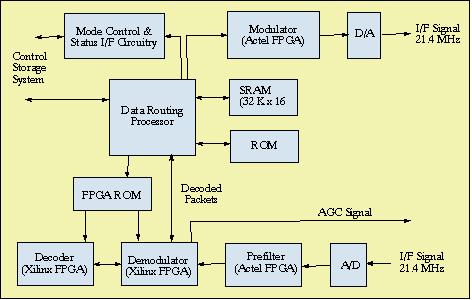
The BBP is an advanced packet modem with on-board processing capabilities. It has been designed specifically for small satellite missions, and FedSat serves as a test bed for various communications modes and internal functions. The BBP’s main purpose is to support small, mobile ground terminals at data rates up to 128 kbps, and an additional messaging service for remote data collection, namely ADAM. The BBP employs TDMA on the uplink and TDM on the downlink. The BBP telemetry and data is interfaced with the DHS and transmitted via the S-band TT&C link.
Ka-band payload module (CSIRO/CRCSS)
FedSat was the first microsatellite to operate at Ka-band. The experiment comprises a Ka-band transponder incorporating GaAs MMICs, and can operate in bent-pipe as well as beacon modes. The experiment is intended to characterize atmospheric transmission of Ka communications and to test the new hardware under space conditions.
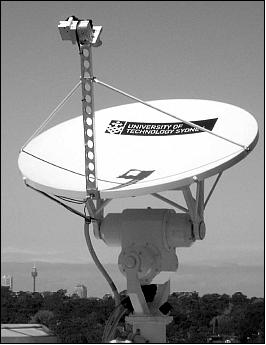
• Ka-band Earth terminals (at UTS)
• Ground control station for FedSat TT&C services (UniSA).
The Ka-band unit is used for bent-pipe and regenerative communications, and as a testbed to space-qualify an GaAs MMIC (Microwave Monolithic Integrated Circuit) device of CRCSS. BBP provides on-board processing of the Ka- and UHF-band units; it also acts as a low-power single modem with flexible operations support (study of communication protocols). Key features of the BBP include turbo coding on the uplink (QPSK modem with a bit error rate of 10-10, it operates on a signal SNR as low as 2 dB, and a data rate of 2 Mbit/s), highly flexible operation including reconfigurable field programmable gate arrays (FPGAs), low power consumption (<5 W), and burst demodulation. 15)

The FedSat Ka-band Earth station, developed at UTS, is regarded the world's first use of the Doppler principle as a Ka-band tracking technique with a single dish. The technique is called FAST (Frequency Assisted Spatial Tracking).
The features of ADAM include:
• ADAM is well suited to LEO-based robust environmental data collection
• It includes store and forward messaging (two way messaging, advanced multiple access and coding)
• It provides an option for ground terminal position location (position location via Doppler measurements)
• It offers reconfigurable operation
• ADAM employs a low power and radiation tolerant design
Potential applications of ADAM include those of ARGO (Array for Real-time Geostrophic Oceanography) and mobile communications. 16) The ARGO program involves data collection services, i.e. uploading of data from a large number of floating buoys in the Southern Ocean and forwarding this information to a ground station. A portion of the ARGO array consists of submergible buoys called PALACE floats (these are Lagrangian buoys which may float at any altitude in the Ocean, measuring temperature and salinity). Two-way link capabilities (with multiple access scheme and error control techniques) permit a reconfiguration of the floats; turbo-coding techniques permit much larger messages per packet. Mobile applications include communications with land-mobile, laptop and hand-held terminals in remote areas for data and messaging experiments. 17)
Applications of ADAM (cooperations with Australia) on other missions include:
• A copy of ADAM is being flown on STSat-1 (launch Sept. 27, 2003) of KAIST/SaTReC of Korea as its DCS (Data Collection System). Note: STSat-1 was formerly known as KAISTSAT-4. 18)
• ADAM is also planned to be flown on X-Sat, a minisatellite project of CREST (Center for Research in Satellite Technologies) at NTU (Nanyang Technological University), Singapore. A launch of X-Sat is planned for 2006 on an ISRO PSLV launch vehicle as a secondary payload.
NewMag (Magnetometer Experiment)
A space science experiment in solar-terrestrial physics, developed at the University of Newcastle, New South Wales, Australia, with the objective to measure electrical currents and perturbations in the Earth's magnetic field in the frequency range of 0.1 Hz to 1 kHz. The aim is to observe naturally occurring electromagnetic wave signatures (oscillating wave fields, including ULF hydrodynamic waves and lower ELF-band ion cyclotron waves) and field-aligned currents in the ionospheric F-region and the exosphere (plasma-wave model improvement of the ionosphere and exosphere). The NewMag and BlackJack ionospheric measurements contribute to this objective.
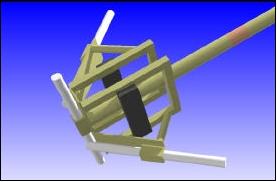
NewMag is a three-axis fluxgate magnetometer. It is designed and built at UCLA (C. T. Russell) and is of MFI (Magnetic Fields Instrument) heritage, flown on the FAST mission (launch of FAST on Aug. 21, 1996). Other missions of MFI heritage are ISEE-1/2 (launch Oct. 2, 1977), AMPTE-UKS (launch Aug. 16, 1984), POLAR (launch Feb. 24, 1996), and Galileo (launch 1989). NewMag has a dynamic range of ±65536 nT with 16 bit resolution (±0.2 nT), and a bandwidth of 10Hz (vector sample rates: internal = 1000/s, standard = 10/s, burst mode = 100/s). The instrument is mounted at the end of a 2.55 m boom (to avoid magnetic interference from the satellite itself), it has a mass of 3 kg and a power consumption of 3 W. 19) 20)
A search coil magnetometer is used in three orthogonal axis. The magnetometer experiment is split in two parts, in terms of accommodation. The post-amplifier is housed in the multiple-payload unit, and the preamplifier and three magnetometer search coils are located on the end of the deployable boom. The boom will extend to separate the magnetometer by 2.5 m from the spacecraft, thus providing sufficient magnetic isolation from the on-board systems to give accurate readings of the Earth's magnetic field.
BlackJack (GPS Flight Receiver)
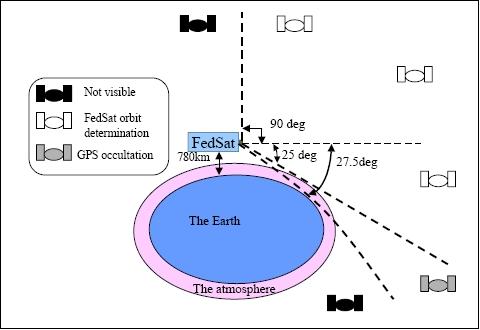
BlackJack was built by SpectrumAstro of Gilbert, AZ, under the designation AstroNav. BlackJack is provided by NASA/JPL (cooperative research agreement with CRCSS) in exchange for BlackJack data availability to US researchers. 21) On the Australian side, the project is conducted in cooperation with QUT (Queensland University of Technology) and the Department of Physics of La Trobe University. There are two major measurement objectives: 1) determination of precise S/C timing, position and attitude, and 2) to obtain dual-frequency ionospheric soundings, permitting the derivation of total ionospheric electron density profiles, by the method of refractive occultation monitoring. The TEC (Total Electron Content) occultation observations of BlackJack provide slant range measurements which can be converted into vertical profiles. 22) 23) 24)
The instrument is a single-antenna navigation version of JPL's BlackJack receiver. A small patch antenna, facing backward in the anti-velocity direction, is mounted onto FedSat. The instrument is configured to track up to 16 GPS satellites simultaneously (3 channels per satellite). The tracking modes supported are: Code Phase L1 (1575.42 MHz) C/A code, L1 P Code/Codeless, L2 (1227.6 MHz) P Code/Codeless & Carrier Phase (Integrated Doppler) on both L1 & L2. The BlackJack assembly has a mass of 2.4 kg and a power consumption of about 11 W.
The receiver operation has a duty cycle imposed (10 minutes on, 40 minutes off, repeated indefinitely) due to FedSat power limitations. Hence, it is planned to take data only at regular navigation measurements (1 sample every 30 s), this rate may be exceeded for short periods only.
The GPS antenna for FedSat is looking toward the anti-velocity direction. According to the altitude of the FedSat and the radius of the Earth, the negative elevation can reach -7.5º. Therefore, the field of view of the aft-looking antenna is nearly two-third of the hemisphere.
The data from the BlackJack GPS receiver served also for POD (Precise Orbit Determination) analysis of the spacecraft. 25)
AIM (Adaptive Instrument Module)
AIM is a demonstration experiment designed/developed at JHU/APL in cooperation with NASA (GSFC, LaRC), Queensland University of Technology (QUT), and CRCSS. Note: AIM is also being referred to as HPCE-1 (High Performance Computing Experiment) payload.
The overall objective is to provide a spacecraft computer capability with reconfigurable hardware in space. AIM contains a SRAM-based FPGA (Field Programmable Gate Array) technology, providing a system capability to evolve or adapt to changing requirements. 26) 27) 28) 29)
The top-level requirements of the AIM demonstration include:
• Use of a Xilinx FPGA as the foundation of the reconfigurable processor (XQR4062XL, part of the XC4000XL series FPGA) 30)
• Store and manage multiple Xilinx FPGA configurations
• Upload additional FPGA configurations
• Detect, correct, and log SEU-induced (Single Event Upset) configuration errors autonomously in the FPGA
• Run stand-alone reconfigurable computing experiments
• Process instrument data with reconfigurable hardware
• Interface to spacecraft command and data handling system
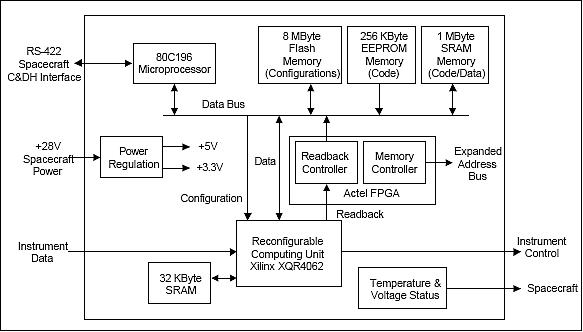
The use of the AIM enables reconfiguration of the FPGA circuitry while the spacecraft is in flight, with many accompanying advantages. The functions implemented in the FPGA can be modified. For example, if the AIM was performing instrument data compression, the data compression algorithm could be altered for better performance. Another advantage is that any design errors in the FPGA circuitry can be fixed on-orbit. This flexibility reduces mission risk, especially for missions with a very tight development schedule. The AIM is designed to either directly interface with sensors or instruments or to receive data through the spacecraft data handling system. 31)
AIM demonstrates the practicalities of using reconfigurable computing hardware devices by conducting a series of designed experiments. Initial experiments include the demonstration of implementing data compression, data filtering, and communication message processing and inter-experiment data computation. Key hardware characteristics of AIM include:
• Internal secondary voltages are generated from an externally supplied +28V
• Power consumption of 1.5 to 5 W
• Serial RS-422 and parallel interfaces
• SRAM-configured FPGA (Xilinx XQR4062XL, of Xilinx Inc., San Jose, CA)
• 16-bit microcontroller based on Intel 80C196 architecture
• Clock frequency of 48 MHz for data processing
• Dedicated 512 k x 8 SRAM for Xilinx scratchpad memory
• Memory paging scheme implemented in hardware to allow microcontroller to access:
- 128 k x 16 EEPROM for boot and application code
- 512 k x 16 SRAM for instructions and data for the microcontroller
- 4 M x 16 Flash for storage of multiple Xilinx configurations
- 64 kbyte I/O space mapped into Xilinx FPGA.
Dynamically reconfigurable FPGAs store their configuration information in on-chip RAM which is loaded from an external source on device power-up, or when a new configuration is required. The high radiation environment of space means that radiation-induced soft errors, in the form of bit-flips in the configuration SRAM, become a significant concern. Current FPGAs do not have the facility to internally monitor the integrity of the SRAM configuration. The AIM uses techniques for confirming configuration integrity by reading back the configuration memory from the FPGA and performing a consistency check. A significant goal of the AIM initiative is to develop these techniques and validate their performance.
References
1) S. Russell, M. Vesely, C. Graham, M. Petkovic, “Progress Towards FedSat 2001 A'stralian Space Odyssey,” Proceedings of the 13th AIAA/USU Conference on Small Satellites, Aug. 23-26, 1999, Logan UT, SSC99-IX-6
2) A. J. Barrington-Brown, A. N. Wicks, L. Boland, S. J. Gardner, E. C. Graham, “FedSat - an advanced microsatellite based on a MicroSIL bus,” Proceedings of the 12th AIAA/USU Conference on Small Satellites, Logan, UT, Aug./Sept., 1998
3) E. C. Graham, ”FedSat: An Australian research microsatellite mission,” IAF Congress, Melbourne, Australia, 1998, in Acta Astronautica, 1999
4) B. J. Fraser, F. W. Menk, C. L. Waters, A. Bish, C. T. Russell, J. D. Means, “Australian Space Research: The FedSat Microsatellite,” URL: https://web.archive.org/web/20110603203559/http://www.ips.gov.au/IPSHosted/NCRS/wars/wars2000/invited/fraser.pdf
5) S. C. O. Grocott, “Modular Attitude Control System for Microsatellites with Stringent Pointing Requirements,” Proceedings of the 14th AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 21-24, 2000, SSC00-VIII-6
6) C. Graham, M. Petkovik, S. Russell, E. S. Seumahu, M. Vesely, “The FedSat Microsatellite,” URL: [web source no longer available]
7) Brian J. J. Embleton, “The Cooperative Research Centre for Satellite Systems - Australia's FedSat Project,” APRSAF (Asia Pacific Regional Space Agency Forum), 2002, URL: http://www.aprsaf.org/data/p_news/aus_afsp.pdf
8) B. J. Fraser, C. T. Russell, J. D. Means, F. W. Menk, C. L. Waters, “FedSat — An Australian research microsatellite,” Advances in Space Research, Volume 25, Issues 7-8, 2000, pp. 1325-1336
9) http://www.spaceandtech.com/spacedata/logs/2002/2002-056b_fedsat_sumpub.shtml
10) “FedSat falls silent - mission ends for Australia's science satellite,” Sept. 19, 2007, URL: http://www.unisa.edu.au/news/2007/190907.asp
11) Bill Cowley, “FedSat: An Australian Small-Satellite Success Story,” ASICC, May 1, 2003, URL: [web source no longer available]
12) http://wdeeker.googlepages.com/spin95.pdf
13) Thorsten Kostulski, “Ka Band Propagation Experiments on the Australian Low Earth Orbit Microsatellite ‘FedSat’,”Thesis for the Degree of Doctor of Philosophy, submitted to the Faculty of Engineering at the University of Technology (UTS), Sydney, Australia, September, 2008, URL: http://epress.lib.uts.edu.au/dspace/bitstream/handle/2100/1166/02Whole.pdf?sequence=2
14) E. S. Seumahu, T .S. Bird, W. G. Cowley, A. J. Parfitt, “The FedSat communications payload,” Proceedings of International Conference on Information, Communications & Signal Processing, 1999
15) Thorsten Kostulski, Sam Reisenfeld, “Ka-band Propagation Experiments on the Australian Low-Earth Orbit Microsatellite FedSat,” AusCTW2005 (Australian Communications Theory Workshop), Brisbane, February 2-4, 2005, URL: http://epress.lib.uts.edu.au/research/bitstream/handle/10453/2934/2005003051.pdf?sequence=1
16) Note: ARGO is a component of the international Global Ocean Data Assimilation Experiment (GODAE).
17) C. Graham, M. Petkovik, S. Russell, E. S. Seumahu, M. Vesely, “The FedSat Microsatellite,” Proc. of ICICS'99 (International Conference on Information Communications and Signal Processing), Singapore, Dec. 7-10, 1999
18) W. Cowley, P. Roberts, V. Kotchetygov, M., Tykesson, W. Lee, G.-H. Shin, “Advanced Data Acquisition and Messaging (ADAM) Payload for KAISTSat-4,” CRC Conference 2001, 44
19) B. J. Fraser, C. T. Russell, J. D. Means, F. W. Menk, C. L. Waters, “ FedSat - An Australian Research Microsatellite,” Advances in Space Research, Vol 25, Issue 7-8, pp.1325-1336, 2000.
20) B. J. Fraser, C. T. Russell, J. D. Means, F. W. Menk, C. L. Waters, “FedSat - An Australian Research Satellite,” http://www-ssc.igpp.ucla.edu/personnel/russell/papers/FEDSAT/
21) Information provided by Thomas P. Yunck of JPL and Bill Falkenberg of SpectrumAstro Inc.
22) Yoaz Bar-Sever, Sung Byun, Sien Wu, Larry Young, “GPS Subsystem for the Primary Atomic Reference Clock in Space (PARCS) Experiment,” URL: [web source no longer available]
23) E A Essex, P A Webb, I Horvath, C. McKinnon, N. Shilo, B. Tate, “Monitoring the Ionosphere/Plasmasphere with Low Earth Orbit Satellites: The Australian Microsatellite FEDSAT,” URL: https://web.archive.org/web/20060223175138/http://www.ips.gov.au/IPSHosted/STSP/meetings/aip/lizabeth/essexv4.htm
24) Charles Wang, Rodney A. Walker, Werner Enderle, “Single Antenna Attitude Determination for FedSat,” URL: http://eprints.qut.edu.au/2920/1/2920_1.pdf
25) Yanming Feng, Ning Zhou, Werner Enderle, “FedSat Orbit Determination: Results From Daily GPS Flight Code Observations,” SatNav 2003, The 6th International Symposium on Satellite Navigation Technology Including Mobile Positioning & Location Services, Melbourne, Australia, July 22-25, 2003, URL: http://eprints.qut.edu.au/archive/00000160/01/Enderle-Fedsat.pdf
26) C. S. Mills, G. Hines, K. R. Fowler, M. A. Garrison Darrin, R. F. Conde, H. A. C. Eaton, “Adaptive Data Analysis and Processing Technology (ADAPT) for Spacecraft,” ESTC 2003 (Earth Science Technology Conference 2003), College Park, MD, USA, June 24-26, 2003, URL: http://esto.nasa.gov/conferences/estc2003/papers/A1P1(Fowler).pdf
27) Richard F. Conde, Ann Garrison Darrin, F. Charles Dumont, Phil Luers, Steve Jurczyk, Neil Bergmann,. Anwar Dawood, “Adaptive Instrument Module - A Reconfigurable Processor for Spacecraft Applications,” URL: [web source no longer available]
28) G. Brebner, N. Bergmann, “Reconfigurable Computing in Remote and Harsh Environments,” http://www.dcs.ed.ac.uk/home/gordon/fan/flexible-comms/fpl99.ps
29) Neil W. Bergmann, Anwar S. Dawood, “Reconfigurable Computers in Space: Problems, Solutions and Future Directions,” MAPLD (Military and Aerospace Applications of Programmable Devices and Technologies), Conference, 1999, URL: https://web.archive.org/web/20081007161324/http://www.klabs.org/richcontent/MAPLDCon99/Papers/P2_Bergmann_P.PDF
30) Xilinx QPRO XQR4062XL Radiation Hardened Field Programmable Gate Array Specification, Xilinx Corp., October 5, 1998
31) Guoxia Yu, Tanya Vladimirova, Martin N. Sweeting, “Image compression systems onboard satellites,” Acta Astronautica, Vol. 64, 2009, pp. 988-1005, URL: https://web.archive.org/web/20130718003224/http://d.yimg.com:80/kq/groups/17370995/2077432478/name/sdarticle[1].pdf