FORTE (Fast On-Orbit Recording of Transient Events) / P94-1
EO
Atmosphere
Mission complete
Magnetic field
Quick facts
Overview
| Mission type | EO |
| Agency | LANL |
| Mission status | Mission complete |
| Launch date | 29 Aug 1997 |
| End of life date | 29 Aug 2000 |
| Measurement domain | Atmosphere, Gravity and Magnetic Fields |
| Measurement category | Gravity, Magnetic and Geodynamic measurements, Lightning Detection |
| Instruments | OLS |
| Instrument type | Magnetic field, Atmospheric chemistry, Gravity instruments, Lightning sensors |
| CEOS EO Handbook | See FORTE (Fast On-Orbit Recording of Transient Events) / P94-1 summary |
FORTE (Fast On-Orbit Recording of Transient Events) / P94-1
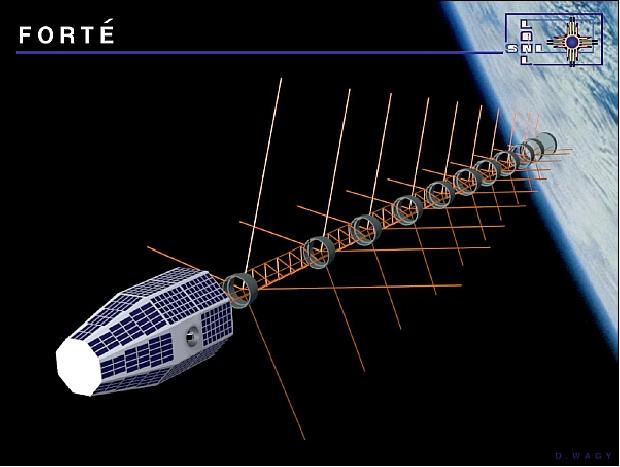
FORTE is a US DOE-sponsored (Department of Energy) spacecraft designed and built by the Los Alamos National Laboratory (LANL) and by Sandia National Laboratories (SNL). The spacecraft features an advanced radio frequency (RF) impulse detection and characterization experiment. The prime objective is the measurement of electromagnetic pulses (EMP), primarily due to lightning, within a noise environment dominated by continuous wave (CW) carriers, such as TV and FM stations. The goal is to develop an understanding of the correlation between the optical flash and the VHF (30-300 MHz) emissions from lightning. Lightning is the main source of electromagnetic transients in this frequency range (nuclear weapon detonations produce also RF transients). 1) 2)
FORTE also conducts ionospheric physics experiments. The effects of large scale structures within the ionosphere are being studied [such as traveling ionospheric disturbances and horizontal gradients in the total electron content (TEC) on the propagation of broad bandwidth signals.
Spacecraft
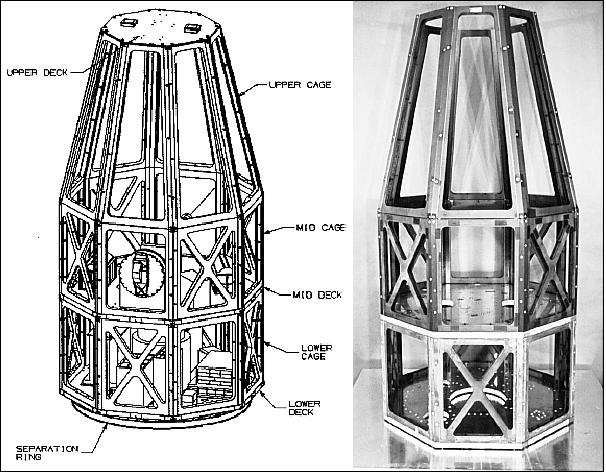
The spacecraft, developed in partnership by LANL and COI (Composite Optics Incorporated), features a lightweight all-composite octagonal frame structure (of 42 kg). The primary structure consists of six major structural components: three structural trusses and three structural instrument decks, along with 24 solar array substrate (SAS) panels (Figure 2). The principles behind this unique spacecraft design are simplicity, modularity, and interchangeability. 3) 4) 5) 6) 7) 8) 9)
The three structural frame trusses are termed the lower, mid, and upper cages. They are all fabricated from flat stock graphite/epoxy (Gr/E). The lower and mid cages are identical to each other. Rectangular frame subassemblies comprise these two cages. The upper cage assembly is constructed using trapezoidal frame subassemblies. Eight frame subassemblies are bonded together to form each of the three octagonal cages.
The three decks are termed the lower, mid, and upper decks. The lower and mid decks are structurally similar to each other and will be used to mount most of the payload and bus components required for the FORTE mission. The upper deck closes out the structure. All three decks are fabricated from aluminum honeycomb sandwichbonded between Gr/E skins. The bus structure has a size of ~2 m x 0.8 m in diameter. A nearly 12 m long RF antenna mast is deployed from the bottom of the satellite in the nadir direction. The spacecraft has a total mass of 236 kg.
The spacecraft bus is composed of the following subsystems: 1) CDMS (Command and Data Management Subsystem), 2) ACDS (Attitude Control and Determination Subsystem), 3) EPS (Electric Power Subsystem), 4) SSR (Solid State Recorder), 5) telemetry subsystem, 6) spacecraft event timing system and 7) space frame.
• The CDMS consists of four modules: 1) the SCP (Spacecraft Process Controller) utilizing the Honeywell 1750A processor, 2) a SCC (Serial Communication Card) of LANL, 3) a DAC (Data Acquisition Card) of LANL, and 4) a HSF (High Speed Formatter) of SNL. The SCC, DAC and HSF modules communicate with the Honeywell 1750A processor using the Honeywell PBIO bus and other satellite instruments using a variety of custom and standard electrical interfaces. The SCP is a Honeywell VHSIC MIL-STD-1750A microprocessor, providing 1 MIPS of computing power and 64K words of programming space, half of which is used for code and half for data storage.
• FORTE is a momentum-biased, gravity-gradient stabilized spacecraft (nadir-pointing). Active stabilization is achieved by reading sensors (magnetometers and Earth horizon sensor), applying attitude control algorithms resident in the spacecraft processor, then driving actuators (magnetic field coils and single pitch axis momentum wheel) at a rate of 1 Hz.
ADCS is composed of three main components: 1) the scanwheel, 2) magnetometers, and 3) magnetic torque rods. The scanwheel is used to provide both rotational inertia that helps to stabilize the satellite in roll and yaw, as well as modify pitch. In addition, the scanwheel has a horizon sensor which, due to the rotation of the wheel, sweeps out a 270º partial cone centered in the nadir direction with an 8º opening angle looking out the side of the spacecraft at an angle of 45º from nadir. The horizon sensor is used to accurately determine the position of the Earth's CO2 emission layer at the horizon relative to the spacecraft's attitude in order to determine the satellite's pitch and roll attitude information. Three two-axis magnetometers are mounted parallel to the spacecraft; they measure the Earth's magnetic field flux along two different axes.
• EPS is composed of 1) solar panels (silicon cells), 2) NiCd batteries (2 x 7.5 Ah), and 3) the PCU (Power Control Unit) and charging system developed by SNL. The body-mounted solar panels provide a daily average of 55 W with a peak of 325 W of power.
• The SSR (Solid State Recorder) has a capacity of 16 MByte.
• RF communications: The spacecraft is being operated in store&forward fashion, 3 communication links are provided:
- UHF (1/4 wave monopole) transmitter which broadcasts realtime SOH (State-of-Health) data which is used during the satellite contact to verify the realtime health of the system and commanding
- S-Band (bifilar helix) transmitter to transmit either the high speed science data or the stored SOH data. The S-band transmitter has a variable downlink rate from 16 kbit/s to 2 Mbit/s in 8 steps in case of link margin problems.
- VHF (1/4 wave monopole) receiver at 2048 bit/s for the command uplink.
Satellite operations are conducted from LANL and SNL in Albuquerque, New Mexico, as well as from the University of Alaska, Fairbanks, Alaska. 10)
Launch
A Pegasus XL air-launch (L-1011 aircraft) took place on Aug. 29, 1997 from VAFB (Vandenberg Air Force Base), CA. The FORTE launch vehicle and launch services were provided by the US Air Force Space Test Program (STP).
Orbit
Near-circular orbit of 830 km x 800 km altitude, inclination = 70º, orbital period of about 100 minutes.
Mission Status
In 2010, the FORTE spacecraft is still in operation in its 13th year after launch. The spacecraft had a design life of 3 years. 11)
• During the mission, frequent multi-sensor lightning observations were conducted from the FORTE and TRMM satellites. This involved the LIS (Lightning Imaging Sensor) of the TRMM spacecraft (launch Nov. 27, 1997) along with the OLS and VHF radio receiver on FORTE. The multi-sensor, multi-phenomenology observations of lightning from space using the FORTE and TRMM spacecraft provided a surprisingly detailed picture of lightning phenomenology on both stroke (pulse) and flash time scales. Collectively, the sensors provide the capability to detect, locate, measure, analyze and classify lightning on a global basis and provide good argument for outfitting future satellite-based global lightning monitors with optical imaging and VHF sensors. 12)
• In 2001 after nearly 4 years of on-orbit operations, FORTÉ continues to be an extremely reliable satellite, which has encountered only a few real problems since launch (Ref. 4).
• Antenna deployment after launch: The deployment of the primary antenna was expected to generate significant disturbance torques, and there was a concern that the ACDS system might not be able to maintain control authority over the spacecraft attitude. However, the antenna deployed flawlessly and the torques were significantly less than expected.
In addition to providing the test experiment for the programmatic mission, FORTE has provided new understandings of lightning events as well as a more complete understanding of the relationship between optical and RF lightning events.
Sensor Complement
The FORTE payload consists of a suite of instruments, each individually useful, and together very useful, for the study of lightning (simultaneous observation of optical and RF emissions of lightning activity in the electromagnetically noisy environment of near-Earth space).
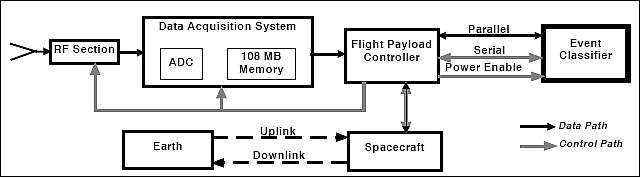
The observation of “lightning events” by an RF system (VHF radio receiver) and by an OLS (Optical Lightning Subsystem) requires an EC (Event Classifier) as part of the FORTE payload. In addition, the on-board data acquisition system must have the capability to be triggered by an RF trigger, an optical trigger, or by the FPC (Flight Payload Controller). The EC is connected to the FPC (Flight Payload Controller). The FPC triggers the EC only when it is needed by enabling power to the EC. 13)
EC (Event Classifier)
The EC is an experiment to determine the feasibility of telemetry reduction by onboard classification. The EC provides on-orbit characterization of impulsive RF events which satisfy the trigger criteria (extensive digital signal processing is involved). FORTE features a 10 m pseudo-log-periodic boom antenna coupled to a DSP (Digital Signal Processor) to capture the VHF (30-300 MHz) electromagnetic transients. 14) 15)
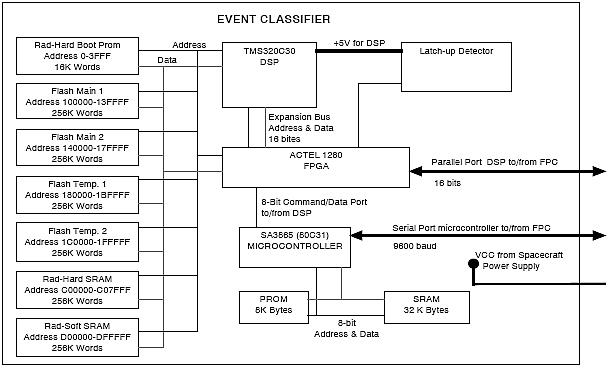
The EC, a DSP of TI (SMJ3320C30), executes neural network-based classification schemes. Communicating only with the FPC, the EC receives raw data and returns analysis reports via a 16-bit parallel port, it receives commands uplinks and state-of-health reports via a serial port.
There are three steps to EC demonstration testing: 1) Processing and classification algorithms are applied to digitized waveforms downlinked by the FORTE payload through the ground station to desktop computers. 2) Testing of promising algorithms in the FORTE engineering unit on the ground. 3) After successful ground testing, the EC is then commanded to perform the same analysis in space.
Successful demonstration of onboard event classification by the EC establishes confidence limits of classifications and enables follow-on missions to eliminate the costly data downlink and ground analysis steps.
RF (Radio Frequency) System
The RF system consists of the RF antennas and the RF receiver system.
The RF antennas are the most prominent feature on the spacecraft. The antenna mast is about 11 m in length, with the largest transverse elements in the antennas being about 5 m in diameter. There are two independent, log periodic array (LPA) monopole antennas in this structure, mounted on the bottom of the spacecraft, arranged in a turnstile configuration. The antennas have a common support structure, but are electrically isolated, making them sensitive to the orthogonal linear polarizations.
The RF system, a VHF radio receiver, was developed and built by LANL. The RF system provides the following features: 16) 17) 18) 19) 20)
- Three broad bandwidth RF receivers covering the frequency range from 30 - 300 MHz (VHF). A multi-band coincidence trigger with perpetual recording of power background in all 16 trigger subbands (each 1 MHz wide).
- High-speed, low power digitizers (300 Msamples/s)
- Broad bandwidth, dual polarization-selective VHF antenna
- Extensive on-board signal processing (adaptive discrimination, signal categorization by attributes)
The RF system derives its signals from either of two active monopoles, or alternatively from two mutually orthogonal, multi-element, passive, moderate-gain log-periodic antennas on nadir-directed deployed monopoles, or alternatively from two mutually orthogonal, multi-element, passive, moderate-gain log-periodic antennas on a nadir-directed deployed boom.
Both the RF System and the OLS (Optical Lightning Subsystem) are configurable for signal-triggered or for time-triggered digitization. There are also options for cross-triggering of PDD (Photodiode Detector) and LLS and for cross-triggering of PDD and the RF payload. With 160 MByte, there is ample memory on board for thousands of events to be stored and then downloaded. The downloading is done up to several times per day, at both Sandia and the University of Alaska.
OLS (Optical Lightning System)
OLS is an experimental lightning detection system was developed and built by SNL. The objective is to record optical flashes and radio frequency emissions generated by lightning storms to correlate lightning flash rates with precipitation rates. The OLS instrument consists of two units:
• LLS (Lightning Location System), a narrow-band detector system (777.6 nm ± 0.5 nm) which employs a CCD imager with a ground resolution of 10 x 10 km (FOV = 80º, 500 frames/s)
• A fast time-response broadband PDD (Photodiode Detector) for the recording of individual light curves. 21) 22) 23) 24) 25)
Photodiode/photometer systems are characterized by excellent temporal resolution (e.g. 10-100 µs) and generally poor spatial resolution (100-1000 km). Conversely, CCD imagers are primarily utilized to provide accurate geolocation and 2-D imagery of lightning events. They are characterized by excellent spatial resolution (1-10 km), low temporal resolution (1-10 ms), and a lack of waveform information.
The PDD employs an unfiltered, single element silicon photodiode with a sensing area of 1 cm2. It is responsive to wavelengths of 400-1100 nm, with a peak response near 850 nm. A sunshade of 15 cm length provides a circular FOV of 80º (the total footprint is about 1200 km in diameter)to match that of LLS. The PDD measures the intensity of the incoming light and triggers on impulse events, thus providing a means to record the light-intensity time history. The PDD employs 12 bit sampling covering a dynamic range of more than four orders of magnitude.
Two 128 x 128 pixel CCD (segmented array) detectors image the lightning; the input is the bright narrowband-filtered line emission centered at 777.4 nm wavelength.. In the “autonomous mode” operation, the instrument produces 1.92 ms long waveforms with 15 µs time resolution. The high temporal resolution of the PDD (about 15 µs) and the high spatial resolution of the LLS imager (about 10 km) combine to give a detailed satellite-based picture of both the spatial and temporal evolution of terrestrial lightning on both stroke (pulse) and flash timescales. OLS augments the RF system to develop high performance lightning discriminator/locator capability.
Detector type | CCD array |
Effective array size | 128 x 128 pixels |
FOV (Field of View) | 80º which amounts to ~1200 km footprint diameter |
Spectral response | 0.1 nm FWHM filter (centered on 777.4 nm) |
Geolocation accuracy | 1-2 pixels (1 pixel ~ 10 km x 10 km) |
Integration time | 2.4 ms |
Anti-glint feature | If any pixel lights up for more than 2 consecutive sample periods, entire event is ignored |
Operating modes | - Pixel event mode, threshold trigger |
Instrument type | Single-element silicon photodiode |
Detector size | 1 cm2 |
FOV | 80º which amounts to ~1200 km footprint diameter |
Spectral response | 0.4 - 1.1 µm |
Responsivity | 0.489 A/W @ 0.9 µm; (0.3325 A/W avg.) |
Sample rate | 67 kHz ( 15 µs resolution) |
Record length | 1.92 ms (6.75 ms in LLS slave mode) |
Dead Time (between records) | 2.5 - 3 ms (2.4 ms in LLS slave mode) |
Trigger modes | - Autonomous, threshold triggered |
The OLS has 2 MB of local memory, which is sufficient to store all the data for up to 12 hours, depending upon the threshold chosen and the activity of the thunderstorms. This data is held in OLS memory until commanded to be downlinked.
References
1) T. C. Thompson, C. I. Grastataro, B. G. Smith, G. Krumweide, G. Tremblay, “Development of an All-Composite Spacecraft Bus for Small Satellite Programs,”. Proceedings of the 8th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 29-Sept. 1, 1994, URL: http://nis-www.lanl.gov/nis-projects/forte/doc-archive/external_docs/LA-UR-94-2897/LA-UR-94-2897.pdf
2) K. K. Ruud, et al., “FORTE Hardware-in-Loop Simulation,” Proceedings of the 11th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Sept. 15-18, 1997, pp. 1-9
3) C. I. Grastataro, T. A. Butler, B. G. Smith, T. C. Thompson, “Development of a Composite Satellite Structure for FORTE,” Proceedings of the Tenth International Conference on Composite Materials, Whistler, British Columbia, Canada, Aug. 14-18, 1995, Report No: LA-UR-95-1016, URL: http://nis-www.lanl.gov/nis-projects/forte/doc-archive/external_docs/LA-UR-95-1016/LA-UR-95-1016.pdf
4) D. Roussel-Dupre, P. Klingner, L. Carlson, R. Dingler, R.; D. Esch-Mosher, A. R. Jacobson, ”Four Years of Operations and Results with FORTE,” the Space 2001 Conference, August, 28-30, 2001, LA-UR-01-2955, AIAA 2001-4627, URL: http://www.forte.lanl.gov/science/publications/2001/Roussel_Dupre_2001_1_Four.pdf
5) http://www.forte.lanl.gov/index.shtml
6) J. R. Maly, K. A. Bender, S. C. Pendleton, “Complex Stiffness Measurement of Vibration-Damped Structural Elements,” International ModalAnalysis Conference, IMAC-XVIII, San Antonio, Texas, Feb.7-10, 2000
7) G. A. Tremblay, E. J. Boyce, T. N. Pham, “Demonstrated technology for affordable, high performance polymer composite spacecraft structures,” Space Programs and Technologies Conference, Huntsville, AL, Sept. 24-26, 1996
8) FORTE: The All-Composite Satellite,”, Composites/Plastics, Sept. 15, 1997, http://composite.about.com/library/weekly/aa091697.htm
9) K. R. Moore, P.C. Blain, S. D. Briles, R. G. Jones, “Classification of rf transients in space using digital signal processing and neural network techniques,”. Applications and Science of Neural Networks, Proceedings SPIE, Vol. 2492, pp. 995-1006, 1995
10) “FORTE First Satellite to be Controlled From Sandia Labs,” URL: http://www.sandia.gov/media/forte.htm
11) Information provided by Michael Cai of LANL
12) W. L. Boeck, D. M. Suszcynsky, T. E. Light, A. R. Jacobsen, H. J. Christian, S. J. Goodman, D. E. Buechler, J. L. L. Guillen, “A demonstration of the capabilities of multisatellite observations of oceanic lightning,” IEEE Journal of Geophysical Research, Vol. 109, 2004
13) K. R. Moore, P.C. Blain, S. D. Briles, R. G. Jones, “Classification of rf transients in space using digital signal processing and neural network techniques,”. Applications and Science of Neural Networks, Proceedings SPIE, Vol. 2492, pp. 995-1006, 1995
14) S. Briles, K. Moore, R. Jones, P. Blain, P. Klingner, D. Neagley, M. Caffrey, K. Henneke, W. Spurgen., “Innovative Use of DSP Technology in Space: FORTE Event Classifier,”.1998, URL: http://nis-www.lanl.gov/nis-projects/forte/doc-archive/external_docs/icspat29139/icspat2.pdf
15) http://www.rasr.lanl.gov/PowerAware/Publications/files/Nov01_PACC_PI_IAT.ppt
16) K. R. Moore, J. F. Wilkerson, et al., “A Space-based Classification System for RF Transients”. Proceedings of the International Workshop on Artificial Intelligence in Solar-Terrestrial Physics, Lund, Sweden, p. 205, 1993
17) A. R. Jacobson, S. O. Knox, et al., “FORTE observations of lightning radio-frequency signatures: Capabilities and basic results,” Radio Science, Vol. 34, 1999, pp. 337-354
18) D. M. Suszcynsky, M. W. Kirkland, A. R. Jacobson, R. C. Franz, S. O. Knox, J. L. L. Guillen, J. L. Green, “FORTE observations of simultaneous VHF and optical emissions from lightning: Basic phenomenology,” Journal of Geophysical Research, Vol. 105, No D2, Jan. 27, 2000, pp. 2191-2201
19) http://www.forte.lanl.gov/science/index.shtml
20) http://www.forte.lanl.gov/science/WVpublications.shtml#satelliteoperation
21) M. W. Kirkland, D. M. Suszcynsky, J. L. L. Guillen, J. L. Green, “Optical observations of terrestrial lightning by the FORTE satellite photodiode detector,” Journal of Geophysical Research, Vol. 106, No D24, pp. 33,499 –33,509, Dec. 27, 2001, URL: http://www.agu.org/pubs/sample_articles/ae/2000JD000190/pdf/2000JD000190.pdf
22) D. M. Suszcynsky, M. Kirkland, P. Argo, R. Franz, A. R. Jacobson, S. Knox, J. L. Guillen, J. Green, R. Spalding, “Thunderstorm and Lightning Studies using FORTE Optical Lightning System (FORTE/OLS),” 11th International Conference on Atmospheric Electricity, June 7-11, 1999, Guntersville, AL, USA, URL: http://www.osti.gov/bridge/servlets/purl/7428-PmZymk/webviewable/7428.pdf
23) D. M. Suszcynsky, T. E. Light S. Davis, J. L. Green, et al., “Coordinated Observations of Optical Lightning from Space Using the FORTE Photodiode Detector and Imager,” Reg. LA-UR-00-341,
24) M. W. Kirkland, D. M. Suszcynsky, R. Franz, J. L. L. Guillen, J. L. Green, R. E. Spalding,, “Observations of terrestrial lightning at optical wavelengths by the photodiode detector on the FORTE satellite,” Rep. LA-UR-98-4098, LANL, 1998, URL: http://forte.lanl.gov/science/publications/1998/Kirkland_1998_1_Observations.pdf
25) D. M. Suszcynsky, M. W. Kirkland, T. E. Light, J. L. L. Guillen, J. L. Green, “Coordinated Observations of Optical Lightning from Space Using the FORTE/OLS Photodiode Detector And CCD Imager,” AGU 1999 Fall Meeting, San Francisco, CA, Dec. 13-17, 1999
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).