GF-2 (Gaofen-2)
EO
Imaging multi-spectral radiometers (vis/IR)
High resolution optical imagers
Land
Launched in August 2014, Gaofen-2 is the second high-resolution optical Earth observation satellite developed by China National Space Administration (CNSA) as part of CHEOS (China High Resolution Earth Observation System). Featuring a design life of up to eight years, the mission goal of the spacecraft is to implement sub-meter, high geographical accuracy Earth surface imaging, to enhance the application of the CHEOS series for Chinese civilian imaging.
Quick facts
Overview
| Mission type | EO |
| Agency | CNSA |
| Mission status | Operational (extended) |
| Launch date | 19 Aug 2014 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Landscape topography |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, Land cover, Land surface topography |
| Instruments | PAN (GF-2), MUX (GF-2) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), High resolution optical imagers |
| CEOS EO Handbook | See GF-2 (Gaofen-2) summary |
Related Resources

Summary
Mission Capabilities
Gaofen-2 builds upon the overall goal of the CHEOS program, which is to construct an advanced Earth observation system with high spatial, spectral and radiometric resolution, using the Panchromatic and Multispectral Camera Suite-2 (PMC-2). Supplied by the Chinese Academy of Space Technology (CAST), PMC-2 consists of two barrel-mounted panchromatic (PAN) and two multispectral (MS) cameras. It allows the mission to achieve all-weather, all-day global coverage, applicable in the fields of agriculture, disaster, resource and environment. In addition to CHEOS objectives, Gaofen-2 imagery is also applied in geographical mapping, land and resource surveying, environment change monitoring, disaster prevention and agriculture and forest estimation.
Performance Specifications
PMC-2 images in four VNIR (visible and near-infrared) bands and one panchromatic (PAN) band each with a FOV (Field of View) of 2.1°. Each of the four cameras cover a swath of 23 km which combine to give a maximum swath of 45.3 km at a spatial resolution of 0.81 m for PAN and 3.24 m for MS imagery.
Gaofen-2 undergoes a near-circular sun-synchronous orbit at an altitude of 631 km and an inclination of 97.7°. It has a revisit time of within five days for any point on Earth and a period of 97.26 minutes.
Space and Hardware Components
Designed and developed by CAST, Gaofen-2 employs the long life CAST-CS-L3000A bus with breakthrough technologies including fast roll and high stable attitude control, long focal length and lightweight camera design to enhance the satellite’s performance and reliability.
As China’s first low earth orbit remote sensing satellite with a design life of eight years, Gaofen-2 features several health monitoring and onboard troubleshooting capabilities. These include autonomous battery charging control, payload subsystems start/stop control and a battery discharge depth safety guard. It also features a TT&C (Telemetry, Tracking and Control) communications subsystem which doubles the satellite tracking coverage and greatly improves monitoring capability and operational efficiency of the satellite.
Gaofen-2 High-resolution Imaging Satellite / CHEOS series of China
Overview Spacecraft Launch Mission Status Sensor Complement References
Gaofen-2 is a follow-on mission of the Gaofen-1technology demonstration mission, a series of high-resolution optical Earth observation satellites of CNSA (China National Space Administration), Beijing, China. GF-2 is part of the CHEOS (China High Resolution Earth Observation System) family with the objective to provide high accuracy geographical mapping, land and resource surveying, environment change monitoring, near realtime observation for disaster prevention and mitigation, as well as for agriculture and forest estimation. 1)
The spaceborne CHEOS program, consisting of 7 optical/microwave satellites, was approved by the Chinese government in 2010 and will be completely activated by 2020. The overall goal of the CHEOS program is: 2)
• Construct an advanced earth observation system with high spatial, spectral and radiometric resolution
• Achieve all-weather, all-day and global coverage EO data acquiring capability
• Provide global application service in the fields of agriculture, disaster, resource and environment, etc.
• Promote international cooperation.
The mission goal of GF-2 to implement sub-meter level, high geographical accuracy Earth surface imaging, promoting application of CHEOS satellites and its social and economic benefits, meanwhile to make breakthrough in key technologies like fast roll and high stable attitude control, long focal length large f-number, lightweight camera design and long life bus design, enhancing China's civilian imaging satellite abilities and reliability.
Spacecraft
GF-2 satellite was designed and developed by CAST (China Academy of Space Technology). It employs the CAST-CS-L3000A bus and two PAN/MS cameras, capable of collecting images with a GSD (Ground Sampling Distance) of 0.81 m in panchromatic and 3.24 m in the multispectral bands on a swath of 45 km.
High image location accuracy: To better meet user's requirements of quantitative applications, many measures have been taken to improve the image location accuracy. The use of dual-frequency GPS signals and a high-precision time system ensured the satellite clock synchronization accuracy being < 50 µs, which could allow the GF-2 to achieve a realtime and post process orbit position determination capability within 10 m and 0.5 m, respectively. The star sensor direct and "star sensor + gyro" joint attitude measurement concept made the attitude determination to be 0.003º high precision level.
Many other approaches, such as the integrated installation of star sensors and camera, a high stable temperature control environment, and the introduction of a special microvibration seismic isolation system, ensured the satellite camera optical axis pointing stability to ≤ 2 arcsec with respect to the attitude measurement reference frame. The high-precision satellite orbit determination, attitude determination and thehigh stability control design ensures the satellite imagery location accuracy reaching the 20~39 m level in the absence of ground control points, which is better than the design specifications.
High stability and rapid roll attitude control: The GF-2 spacecraft introduced for the first time a domestic high precision APS (Active Pixel Sensor) star sensor, MWs (Momentum Wheels) and CMGs (Control Moment Gyros) for its ADCS (Attitude Determination and Control Subsystem). While orbiting the Earth, four momentum wheels balance the whole satellite momentum, and keep its 3-axis ADCS stable with respect to the nadir direction. The mixed MWs and CMGs attitude control model, the optimized attitude steering and stabilization algorithm, especially the finely designed "avoidance of excited vibration of flexible body" algorithm, realized the high precision and high stability attitude control and rapid roll of the satellite. On-orbit test show that the stability can be achieved 5 x10-4 º/s with 0.0025º attitude pointing accuracy. The agile satellite is able to perform a roll motion to either side of the ground track of up to ±35º, thereby extending the FOR (Field of Regard) for observations, achieving a stable attitude within 150 s in the maneuver.

Being China's first LEO remote sensing satellite with 5~8 years of design life, GF-2 features several smart health monitoring and onboard troubleshooting capabilities. These include: electronic components with high ionizing radiation TID (Total Ionizing Dose) and high-energy charged particles, SEE (Single Event Effect) immunity and raw materials with long duration adaptability for high and low temperature recycling and ultra violet environment. Comprehensive experimental verification for key devices like battery, gyroscope, camera, SADA (Solar Array Drive Apparatus), solid state memory, onboard computer, MWs and CMGs etc. also enhance the satellite reliability to be not less than 0.6 at the end of the satellite's life.
In addition, GF-2 features some onboard intelligent health monitoring and self-management capabilities, including autonomous battery charging control, a battery discharge depth safety guard, payload subsystems start/stop control etc., which provide a better control for the batteries, momentum wheel, control moment gyros, solar array drive mechanism and data transmission antennas- in particular a better balance between the work strength and stress environment, avoiding early failure problem occurrences, and ensuring the longevity goals to meet the design requirements.
The GF-2 spacecraft features a TTC (Telemetry, Tracking & Command) communications subsystem, which doubles the satellite tracking coverage and greatly improves the monitoring capability and operation efficiency of the satellite.
Parameter | Item/Function | Value |
Orbit | Type, Altitude, Inclination | Sun-synchronous, 631 km, 97.9º |
Spacecraft | Mass | 2100 kg |
ADCS (Attitude Determination and Control Subsystem) | Control method | 3-axis stabilization |
Spacecraft power | Solar panel power @ EOL | ≤ 3200 W |
TT&C | Type | USB (Unified S-band) + Relay Satellite |
Payload data handling & transmission | Frequency | X-band |
Payload observation capabilities | Spectral range (µm) | Pan: 0.45~0.90 |
Launch
Launch: The GF-2 spacecraft was launched on August 19, 2014 (03:15 UTC) with a CZ-4B (Long March-4B) vehicle from TSLC (Taiyuan Satellite Launch Center) in the Shanxi Province of northern China.
The GF-2 satellite was originally scheduled to launch in December 2013; however, the launch was delayed because of the launch failure of the Long March-4B vehicle that was supposed to orbit the Brazilian CBERS-3 on December 9, 2013.
Secondary Payload
The BRITE-PL-2 nanosatellite, also referred to as Heweliusz, of SRC/PAS (Space Research Center/ Polish Academy of Sciences of Warsaw, Poland.
Orbit: Sun-synchronous near-circular orbit, altitude = 631 km, inclination = 97.9º, LTDN = 10:30 hours, period = 97.26 minutes.
Mission Status
• October 2016: China's GF-2 spacecraft and its payload are fully operational, featuring two identical cameras with a ground sample distance (GSD) of 0.8 meters for the panchromatic camera and 3.2 meters for the multispectral camera, along with a swath width of 45 kilometers. These cameras employ a Three Mirror Anastigmatic (TMA) optical system in pushbroom mode, marking the first design in China with a small relative aperture of 1/15. This unique design characteristic contributes to a reduced mass and volume of the entire system compared to traditional designs. 3)
• October 2015: The GF-2 spacecraft is operational. Figures 3 and 4 are sample images taken during the mission's Launch and Early Orbit Phase (LEOP). The imagery will be utilized across a wide range of applications including land and resource analysis, urban development planning, transportation management, disaster monitoring, and environmental protection. Additionally, it will support activities such as mineral resource exploration, crop yield estimation, and public safety initiatives. As image products continue to develop, GF-2 is expected to play a significant role in both domestic and global commercial remote sensing markets.


• March 6, 2015: Following the completion of orbital commissioning and application testing in land resources, environmental protection, and agriculture, the satellite GF-2 has been declared officially operational. Results indicate that its performance parameters exceed expectations, with excellent image quality. GF-2 will collaborate with other remote sensing satellites, such as GF-1, CBERS-3, and ZY3. The satellite's services are poised to enhance Chinese image data application and spatial information sectors, potentially reducing the need for imports of higher-resolution imagery.
• October 2014: After its launch on August 19, 2014, GF-2 underwent one week of engineering verification and five weeks of payload testing and setting. Tasks included setting up camera imaging parameters, adjusting data transmission conditions, and conducting various task verifications and operating mode tests. These tests included imaging during spacecraft rolling maneuvers, radiometric calibration, and geometric accuracy evaluation. Upon optimization of all commissioning functions, the satellite was declared "operational" in October 2014 and delivered to end-users.
Sensor Complement
The satellite is configured with two barrel-mounted panchromatic and two MS (Multispectral) cameras, providing a combined swath width of 45.3 km. The revisit frequency of the spacecraft is in the range of 4 -69 days, depending on the particular application, and the observation range of the mission covers a region between 80ºN to ~80ºS.
PMC-2 (PAN and Multispectral Camera Suite-2)
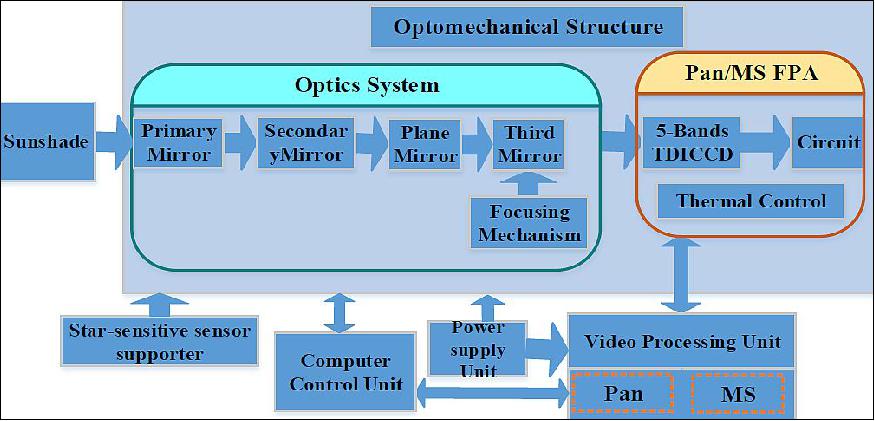
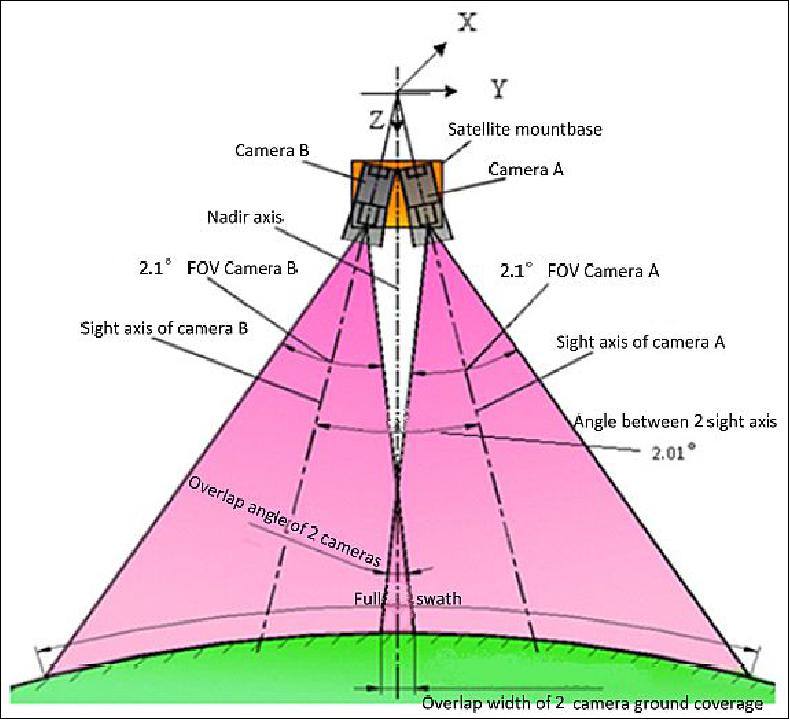
The two PMC-2 imagers have a light and compact on-axis TMA (Three Mirror Anastigmatic) optical system, with a focal length of 7.8m, and an f-number of 15. Each one adopts 5 spectrum (PAN+4 MS) TDI (Time Delay Integration) CCD (Charge Coupled Device) with an individual FOV of 2.1º. With the combination of two camera FOVs, the full swath is extended to 45.3 km and the subsatellite point spatial resolution is 0.81 m for PAN and 3.24 m for MS imagery. The configuration of the observation scheme is illustrated in Figure 7.
The PMC-2 assembly is also built by CAST (China Academy of Space Technology). Some parameters are: 4)
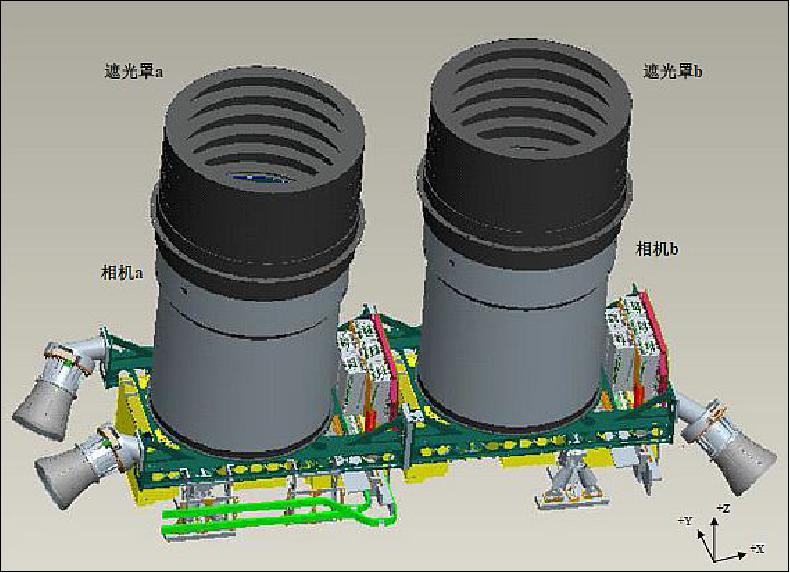
• The size of camera: 1500 x 700 x 1000 mm (2 cams)
• Power: < 280 W
• Mass: < 300 kg.
Three star-sensitive sensors are accommodated on the main support structure of the two cameras (Figure 6). All the images are compressed before being downlinked to the ground stations. The computer control unit manages the functions such as power distribution, communications via 1553B, focusing control and telemetry data acquisition. The power supply unit provides various secondary power inputs for the cameras. The mechanical part of the imager is also shown in Figure 6.
To realize a 45 km swath width and to ensure a high resolution image quality, a number of innovative techniques have been implemented in the imager. The imager has small relative aperture folding type Korsch optical system, which results in the compact structure of the system. The telescope tube is built using a light ceramic matrix composite, and a big caliber primary mirror (530 mm) of SiC material of low mass. An isolation technique has been used to effectively reduce the vibration of the system and to provide an optimum of mechanical and thermal stability. The 3 star-sensitive sensors are directly installed on the cameras to avoid any errors caused by thermal distortion of the satellite bus structure.
Spectral bands | PAN:450-900 nm |
D/f | 1:15 |
GSD (Ground Sample Distance) at nadir | PAN: 0.8 m, MS: 3.2 m |
Swath width at nadir | 23 km for each camera and 45 km in combined configuration |
MTF (Modulation Transfer Function) | PAN ≥ 0.12, MS ≥0.24 |
Data quantization | 14 bit ADC (Analog Digital Conversion) with 10 bit transmission |
Calibration accuracy | Absolute calibration accuracy: better than 7%; Relative calibration accuracy: better than 3% |
Veiling glare coefficient | Better than 3% |
Design life | 5 to 8 years |
High radiometric data quality: To ensure a high radiometric quality of the images in the smaller relative aperture of camera, the GF-2 camera optic system and imaging electronics has been optimized in the MTF (Modulation Transfer Function ) system .The statically measured MTF in the lab is 0.12 for PAN, and 0.2 for MS data. in lab condition. On orbit, the dynamic MTF is 0.1 at Nyquist frequency.
The PMC-2 imagers have both outer and inner baffles to control the stray light sufficiently, focal plane circuits and CCD heat pipe cooler to greatly reduce the electronic random noise and system noise, respectively. These measures ensure that the image signal noise remains as small as possible. Under different sun elevation angles and the ground surface albedo conditions, the satellite SNR achieves values in the range of 23~43 db for PAN and 25~43db for MS data. To meet different ground surface reflecting light condition, the imaging integration time and image gain are designed to be adjustable within 1~96 and 1~5 levels, respectively and can be adjusted for every spectrum band individually. The on-orbit test histogram results exhibit a system dynamic range of 20~800 DN and a linearity of better than 3%, this results in an optimal visual effect of the imagery.
Low-mass structure: The PMC-2 design adopted the TMA design which has a relatively smaller aperture. By optimizing the distance between the primary and secondary mirrors and the pitch angle of fold mirror, the system acquires a greater package ratio (ratio of focal length to length of optical system). The main support structure, consisting of a truss-damping structure, greatly enhances the camera structure stiffness and adaptability to the launch boost phase overload, and almost isolated the vibration jitter passed to the mirrors from the spacecraft platform. New ceramic-based carbon fiber composite materials were used for the primary and secondary mirrors, supporting the barrel-mounted camera suite, which greatly reduce the camera mass. This design made the camera more compact and lighter, which reduces the camera size and mass by 50% compared with the traditional design.
Highly integrated detector electronics: To adapt the low-mass design of the cameras,a highly integrated configuration of the imaging is adopted which is mainly comprised of CCD arrays and event driven preamplifier circuits. The CCD arrays consist of a titanium box block, mounted with 5 CCDs aligned one by one for co-planetary and linearity to within 10 µm. Each CCD is a custom designed TDI CCD with five spectral bands and an improved quantum efficiency. The CCD driven and preamplifier circuits are assembled in close location to the CCD arrays, and in addition, both the CCD and its circuits are closely thermal controlled, which provide an operating temperature of -2~5°C for the CCDs on orbit. This reduces the dark current and keeps the electrical noise of the imaging circuits to acceptable low levels. The circuit working frequency is 10 MHz; The TLK2711 high-speed serial data interface is used to provide the A/D conversion signal of every CCD. The raw image data rate for each camera is up to 20 Gbit/s, which mainly depends on the integration time in the different imaging modes. All these design features in the imaging circuits assure high dynamic, low noise of imaging signals, guaranteeing the image quality efficiently.
Data storage and transmission: The GF-2 satellite has a solid state memory storage capacity of 4.9 Tbit for the acquired imagery, which is being compressed to 1/3 size for panchromatic data and 1/7 for multispectral data with no quality loss before being passed to the storage system from the cameras. The X-band high-speed signal modulation technology and high gain dual-polarized spot beam antennas are used to transfer the stored data to a ground station at a data stream rate of 2 x 450 Mbit/s.
Flexible working modes: A variety of payload working modes are designed to meet the user requirement of flexibly, including quasi-realtime recording and playback transfer mode, recorded playback transfer mode, and direct imaging and retransfer mode. The first two modes are main modes for the nominal operations of the spacecraft. The quasi realtime recording and playback transfer mode is for the imaging mission, while the satellite has access to a ground station, and the recorded playback transfer mode is used in the imaging case with no access from the satellite to a ground station. The 3rd mode is special for on-orbit experiments and onboard storage failure events, and is only used to transfer either panchromatic or multispectral data directly without onboard compression and storage.
In addition to the image data, auxiliary image data, and bus service system telemetry data can also be stored in the solid state memory and transferred to a ground station in all three working modes. According to the amount of transferred data and the location of a ground station, all above modes can downlink transfer to a single ground station, or dual stations relay, or to a mobile station, which enhances greatly the efficiency of the satellite.
References
1) Ming Li , Teng Pan, Hui Guan, Hongyu Liu, Ji Gao, "Gaofen-2 mission introduction and characteristics," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B1.2.7
2) H. Qi, "China High-resolution Earth Observation System (CHEOS) and its Latest Development," Proceedings of the 51st Session of Scientific & Technical Subcommittee of UNCOPUOS, Vienna, Austria, Feb. 11-22, 2014, URL: http://www.unoosa.org/pdf/pres/stsc2014/tech-47E.pdf
3) DongJing Cao, Haibin Jiang, Wei Huang, "The techniques and in-orbit application of GF-2 satellite camera," Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16,B1,3,5
4) Information provided by Teng Pan of CAST.
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top