GEOSAT (Geodetic/Geophysical Satellite)
EO
NASA
Mission complete
US Naval Research Lab
GEOSAT was used for measurements of ocean topography for submarine commanders. Later, it was used for long-term observations of sea, wind, waves, and ice topography. GEOSAT launched in 1985 and ended in 1990.
Quick facts
Overview
| Mission type | EO |
| Agency | NASA, US Naval Research Lab |
| Mission status | Mission complete |
| Launch date | 12 Mar 1985 |
| End of life date | 01 Jan 1990 |
| CEOS EO Handbook | See GEOSAT (Geodetic/Geophysical Satellite) summary |
Related Resources

Summary
Mission Capabilities
The primary instrument onboard GEOSAT was the GEOSAT Radar Altimeter (GRAS). Its objective was to study the marine gravity field as accurately as possible. The GRA takes high-precision range measurements between the satellite and the subsatellite point at nadir. Orbit was determined by a two-frequency Doppler TRacking System (Tranet).
Performance Specifications
The TWT transmitter of the GRA consumed 70 W of power. Transmission occurred at a peak RF power of 20 W and a bandwidth of 320 MHz. The GRA had a 500 MHz dual conversion receiver with Automatic Gain Control (AGC) of 0 – 63 Db.
Also present was the antenna with a 1.04 m diameter parabolic dish of 0.29 m height. This antenna operated within a 2.0o bandwidth and permitted a gain of >37.6 Db. Overall instrument mass and power consumption was 86.5 kg and 125 W, respectively. Finally, the centre frequency of the GRA was 13.5 GHz.
Overall, the GRA could measure ocean altitude to within several decimetres.
For its Geodetic Mission, GEOSAT followed a sun-synchronous polar orbit with an inclination of 108.1⁰. Its minimum altitude was 757 km while its maximum altitude was 814 km. The spacecraft’s orbital period was 100.6 minutes. Overall, the orbit was based on a 3-day near-repeat orbit that was permitted to drift, ultimately producing a tightly spaced ground track pattern with an average spacing of 4 km.
For the Exact Repeat Mission, GEOSAT was manoeuvred into a near-polar circular orbit with an inclination of 108⁰, an altitude of 800km and a period of 101 minutes. Its repeat period was 17.05 days.
Space and Hardware Components
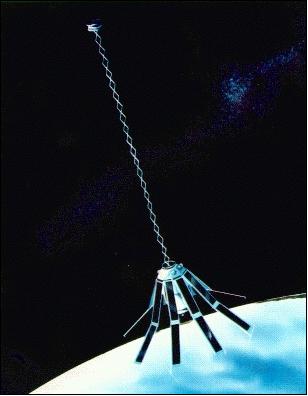
The spacecraft maintained its orbit through a velocity control system and a GEOSAT Attitude Control Subsystem (ACS). The latter employed gravity-gradient stabilisation, which would point the radar altimeter to within 1⁰ of nadir with 98% accuracy. The ACS consisted of a 6-metre scissors boom with a 45 kg end mass, redundant momentum wheels, attitude control thrusters, three digital sun-attitude detectors, and a three-axis vector magnetometer.
RF communications were achieved through two dual-track high-density tape recorders (Odetics). They would independently record a 10.205 kbit/s telemetry stream. The onboard recording lasted up to 12 hours, and playback for transmission to the ground occurred at 833 kbit/s. A telemetry subsystem was used for transmission, consisting of two S-band transmitters and two encryption units.
Spacecraft command was carried out through a VHF uplink from the APL ground station.
The mission ended in January 1990. This was partly due to failures of the onboard tape recorders. It was also as a result of simultaneous failure of the onboard batteries.
GEOSAT (Geodetic/Geophysical Satellite)
GEOSAT was a pioneering research mission of the US Navy dedicated to radar altimetry (the mission is also referred to as GEOSAT-A).
The overall objectives were:
- provision of a dense global grid of altimeter data for Navy use in the areas of geodesy (Earth's gravitational models),
- the study of fronts and eddies, winds, waves and ice topography, and physical oceanography in the `Exact Repeat Mission' (ERM). 1) 2) 3) 4) 5) 6)
During the initial phase of general mission planning and design, it was recognized that valuable environmental data also could be obtained from the GEOSAT altimeter. The oceanographer of the Navy responded with the “Global Ocean Applications Program” to exploit the altimeter observations for operational physical oceanography during an extended mission following the completion of the classified geodetic mission.
The Navy declassified the first set of GEOSAT data in 1990 that covered a doughnut-shaped area of ocean that surrounds Antarctica between 60º and 72º south latitude. In 1992, the Navy declassified all Geodetic Mission (GM) radar altimeter data acquired by the GEOSAT spacecraft over oceanic regions south of 30º South. The GEOSAT data for the entire global sea surface was declassified in July 1995. 7)
NASA obtained GEOSAT data for extensive waveform modelling and ice sheet research. Under an agreement with the US Navy, NOAA/National Ocean Service produced the ERM Geophysical Data Records (GDRs) which are distributed by the NODC (National Oceanographic Data Center), Silver Spring, MD.
Overall, the GEOSAT mission provided ocean topography information in the time period 1985-1990. GEOSAT is considered to be the first altimeter mission to provide the research community with long-term global observations of sea level, wind speed, wave height, and ice topography.
Although the mission was not designed specifically for oceanographic applications, the data provided significant advancement in marine geophysics since it gave oceanographers the first opportunity to experiment with a multi-year global data set.
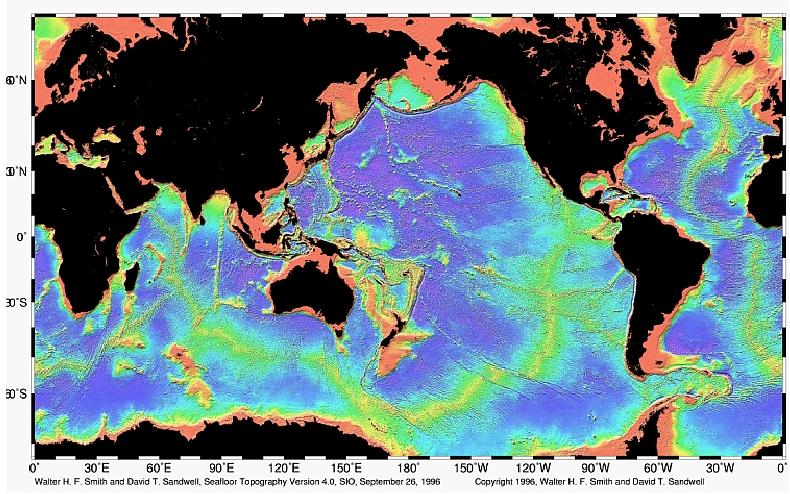
For instance, JHU/APL used the data for sea-bottom topography mapping by inverting sea surface slope data from height measurements provided by the GEOSAT radar altimeter. This ocean topography map offered twice the resolution of the best previous global map. 8) 9) 10) 11)
The oceanographic data from the ERM became a critical component of the Navy's operational mesoscale analyses. The extensive GEOSAT data validation program demonstrated the ability of the radar altimeter to measure the dynamic topography of the Western Boundary currents and their associated rings and eddies, to provide sea surface height data for assimilation into numerical models.
These data were also used by the scientific community to determine sea-level variability and absolute dynamic height to scales of thousands of kilometres for studies of long-term sea-level variability in diverse regions of the globe, including the first-ever basin-wide synoptic view of sea-level change during El Niño. 12) 13)
Background
Detailed knowledge of topography is fundamental to the understanding of most Earth processes. On the land, weather and climate are controlled by topography on scales ranging from large continental landmasses to small mountain valleys. Since the land is shaped by tectonics, erosion, and sedimentation, detailed topography is essential for any geological investigation.
In the oceans, detailed bathymetry is also essential for understanding physical oceanography, biology, and marine geology. Currents and tides are controlled by the overall shapes of the ocean basins as well as by the smaller sharp ocean ridges and seamounts. Sea life is abundant where rapid changes in ocean depth deflect nutrient-rich water toward the surface.
Because erosion and sedimentation rates are low in the deep oceans, detailed bathymetry also reveals the mantle convection patterns, the plate boundaries, the cooling/subsidence of the oceanic lithosphere, the oceanic plateaus, and the distribution of off-ridge volcanoes. 14)
Topographic mapping with orbiting laser and radar altimeters has been the focus of the current exploration of Venus, the Moon, and Mars and is providing very high-resolution topographic maps of the Earth's land areas.
However, since one cannot directly map the topography of the ocean basins from space, most seafloor mapping is a tedious process that has been carried out over a 30-year period by research vessels equipped with single or multibeam echo sounders.
Two developments have vastly improved our knowledge of seafloor topography.
- First, the careful efforts by scientists throughout the world to archive the digital-sounding data and assemble the data into large databases have provided much-improved access to the 30-year mapping effort.
- Second, radar altimeters aboard the ERS-1 and the GEOSAT spacecraft have surveyed the marine gravity field over nearly all of the world's oceans with high accuracy and moderate spatial resolution.
In March of 1995, ERS-1 completed its dense mapping (~8 km track spacing at the equator) of sea surface topography between the latitudes of ± 81.5º.
Late in the Cold War, the United States Navy decided it would be a good idea to survey the altitude of the ocean surface, all over the world, to within a few centimetres. The point was not to measure waves. The ocean is not flat even where it is calm: it has hills and valleys that depart by as much as a few hundred feet from what we think of as sea level. The slopes of these features are so gentle--they extend over tens or even hundreds of km--that no ship ever feels them. Yet the Navy decided that submarine commanders, of all people, would benefit from precise measurements of this imperceptible topography.
The GEOSAT mission was originally managed by the Office of Naval Research (ONR), then was transferred to the Naval Electronics Systems Command, now referred to as Space and Naval Warfare Systems Command (SPAWAR).
The spacecraft and the payload were designed and built by JHU/APL (Johns Hopkins University/Applied Physics Laboratory) of Laurel, MD, as the prime contractor for the Navy. In addition, JHU/APL provided mission operations.
The function of data reception, data handling and processing, archiving and distribution were provided by JHU/APL, the Navy [NSWC (Naval Surface Weapons Center), NORDA (Naval Ocean Research and Development Activity)] and NOAA. 15)
Spacecraft
The basic structure of the GEOSAT spacecraft is similar to the GEOS-3 satellite: the design consists of a conical structure below the core for the structural attachment of the velocity control system.
The GEOSAT attitude control subsystem (gravity-gradient stabilization) was designed to point the radar altimeter to within 1º of nadir 98% of the time. The system components were a 6 m scissors boom with 45 kg end mass, redundant momentum wheels for roll and yaw stiffness, and pitch and roll attitude control thrusters. Attitude sensing was provided through the use of three digital sun-attitude detectors and a three-axis vector magnetometer. The on-orbit dry mass of the S/C was 635 kg, design life of 3 years. 16)
RF communications:
GEOSAT was equipped with two dual-track high-density tape recorders (Odetics) that independently recorded the 10.205 kbit/s telemetry stream and played it back at 833 kbit/s for transmission to the ground (on-board recording up to 12 hours). Spacecraft command was accomplished via a VHF uplink from the APL ground station. The telemetry subsystem consisted of two S-band transmitters and two encryption units.
The spacecraft also included redundant Doppler beacons for continuous tracking by a network of ground stations within the DMA (Defense Mapping Agency) and for a source of accurate timing to the radar altimeter and the telemetry subsystem. A C-band transponder was also included on GEOSAT.
Launch
The launch of the GEOSAT spacecraft took place on March 12, 1985, on an Atlas-E vehicle from VAFB (Vandenberg Air Force Base), Vandenberg, CA.
GEOSAT orbits
1) GM (Geodetic Mission):
Sun-synchronous polar orbit, inclination=108.1º, apogee = 814 km, perigee = 757 km, period = 100.6 minutes. The GM orbit was based on a 3-day near-repeat orbit which was permitted to drift, ultimately producing a tightly spaced ground track pattern. The main goal was to obtain a densely sampled map of the marine geoid. The average spacing of the ground-track grid was 4 km. The GM period was from March 31 1985 to Sept. 30, 1986.
2) ERM (Exact Repeat Mission):
Upon completion of the geoid-mapping objective, GEOSAT was manoeuvred into the SEASAT (launch of SEASAT on June 27, 1978 - it lasted 100 days) orbit in Sept. 1986, i.e. into an exact repeat orbit with a period of 17.05 days for the observation of geodetic parameters of the oceans (near-polar circular orbit, altitude of 800 km, inclination of 108º. period of 101 min). The ERM mission started officially on Nov. 8, 1986, and continued until January 1990, when the mission was terminated due to the degradation of the altimeter's output power. 17) 18)
Mission Status
GEOSAT operations consisted of two distinct mission phases:
• The primary mission was the classified Geodetic Mission (GM) with a mission duration of 18 months (until Sept. 30, 1986). The GM data remained classified until June 28, 1995.
• The second mission phase is known as the 'Exact Repeat Mission' (ERM), which was unclassified; it started on Oct. 1, 1986, and ended in January 1990 (partly due to failures of the two on-board tape recorders, the S/C batteries failed also at the same time). The ERM provided more than three years of precise altimeter data - which became also available to the scientific community.
GEOSAT was the first multi-year high-precision altimetry mission, and its height measurements have made valuable contributions in the fields of physical oceanography, geodesy, geophysics, and glaciology. It remains unique in terms of the dense spatial sampling of the Geodetic Mission, as well as being the only altimeter operating in the 1980s (Ref. 6).
Sensor Complement
GRA
GRA (GEOSAT Radar Altimeter), designed and developed at JHU/APL (based largely on the Seasat altimeter design). Range measurement between the satellite and the subsatellite point (at nadir) of the orbit with high measurement precision (a range precision of a few decimeters was obtained); the objective was to study the marine gravity field as accurately as possible. Orbit determination was performed with a two-frequency Doppler Tracking System (Tranet). The Tranet data set was declassified in 1993. 19) 20)
The altimeter consists of two main subsystems: the RF section and the signal processor. The RF section in turn consists of a 5 cm thick honeycomb panel with various subsystems attached to one surface and a parabolic dish attached to the opposite surface. The signal system generates a linear FM (chirp) pulse waveform for transmission by a travelling wave tube 20 W amplifier. 21) 22)
Instrument centre frequency | 13.5 GHz (Ku-band, 2 cm wavelength), a single-frequency instrument |
Transmitter | Type: TWT (Traveling Wave Tube) |
Receiver | Type: Dual conversion (500 MHz, 0 h) |
Antenna | Type: 1.04 m parabolic dish |
RF section envelope | 1.04 m (diameter), 0.29 m (height) |
Instrument mass, power | 86.5 kg, 125 W |
GRA contained an onboard calibration mode that was invoked twice daily to track waveform sample gain and attitude, wave height, automatic gain control, and height.
• For waveform sample gain correction, the onboard tracker operated on a set of 60 waveform samples in the power spectrum outputs of a digital filter bank. Effects, such as in-band ripple and band-edge roll-off of anti-aliasing low-pass filters in the altimeter receiver were removed by individual waveform sample gain correction factors.
• The correction processes of the attitude determination (and related corrections) started with the computation of a voltage proportional to attitude (VATT) based on the amplitude of the last eight waveform samples.
Overall, the data quality for the oceanographic applications was somewhat compromised due to the shortcomings in the system design owing to the military objectives of the mission (principally the lack of a water vapour radiometer, the lack of a dual-frequency altimeter for ionospheric corrections, and the use of a passive attitude control system). However, as an early altimeter mission, GEOSAT clearly demonstrated the wide range of potential oceanographic and geophysical applications of altimetric measurements of ocean topography. 23)
Data Products
Raw data were processed into Geophysical Data Records (GDRs) by APL and NOAA. The GDRs include height data derived from average echoes at a rate of 10 Hz and mean height values at 1 Hz (corresponding to a data point every 6.7 km on the surface). Although the primary objective of the GEOSAT mission was to operate over oceans, echoes were also collected over ice and land surfaces. 24) 25)
The data analysis employed the JGM-3 (Joint Gravity Model-3) developed at NASA/GSFC and the University of Texas.
NOAA/NODC in Washington, DC provides GEOSAT data of the ERM period on CD-ROM (GEOSAT altimeter crossover differences) as of Dec. 1992. A significantly improved version of the GEOSAT data was released in June 1997; it is available at NOAA/NODC.
In 2006, the 20th-anniversary GEOSAT data set improvements are underway to extend the combined altimetric data set to include the GEOSAT data: 26)
• GEOSAT's first long altimetry mission - played important role in geodesy, geophysics, oceanography & glaciology
• The mission remains unique in terms of its spatial coverage/resolution and providing altimetry in the era of the 1980s.
• Archiving of altimetric data sets is crucial, as future improvements cannot be fully anticipated:
- Weather model reanalysis
- Improved tidal and ionospheric models
- Improved gravity models and precise orbit determination
- New retracking methods and algorithms
• GEOSAT 20th anniversary data set:
- 5 cm orbits based on GRACE gravity model
- 10 Hz dataset with improved corrections
- Retracked SSH, SWH from 5-parameter & 1-parameter fits.
An early example of topographic applications in 1997:
Using satellite sensor data declassified by the Navy in combination with data from the ERS-1 mission of ESA (European Space Agency, launch of ERS-1 in 1991) and repeat-track coverage from the Topex/Poseidon altimeter (NASA/CNES mission, Launch Aug. 10, 1992)), Walter H. J. Smith (NOAA) and his colleague, David Sandwell of the Scripps Institution of Oceanography (La Jolla, CA), have generated a computer model of the seafloor in unprecedented detail. The new map, which infers seafloor features from changes in the strength of gravity, provides the first detailed view of ocean floor structures in many remote areas of the Earth. 27) 28) 29)
References
1) “The Navy GEOSAT Mission: An Overview,” Johns Hopkins APL Technical Digest, Volume 8, No. 2, 1987
2) “The Navy GEOSAT Mission Radar Altimeter Satellite Program,” in Monitoring Earth's Ocean, Land, and Atmosphere from Space, Volume 97, 1985 AIAA, pp. 440-463
3) http://www.fas.org/spp/military/program/met/geosat.htm
4) J. J. Jensen, F. R. Wooldridge, “The Navy GEOSAT Mission: An Introduction;” McConathy, D. R. and C. C. Kilgus, “The Navy GEOSAT Mission: An Overview,” and W. E. Frain, M. H. Barbagallo, R. J. Harvey, “ The Design and Operation of GEOSAT,” all in Johns Hopkins APL Technical Digest, Volume 8, No. 2, 1987
5) R. F. Gasparovic, R. K. Raney, R. C. Beal, “Ocean Remote Sensing Research and Applications at APL,” Johns Hopkins APL Technical Digest, Vol. 20, No 4, 1999, pp. 600-610, URL: http://www.jhuapl.edu/techdigest/TD/td2004/gaspar.pdf
6) John Lillibridge, Walter H. F. Smith, David Sandwell, Remko Scharroo, Frank G. Lemoine, Nikita P. Zelensky, “20 Years of Improvements to GEOSAT Altimetry,” Symposium: 15 Years of Progress in Radar Altimetry, Venice, Italy, March 13-18, 2006, URL: https://earth.esa.int/eogateway/events/15-years-of-progress-in-radar-altimetry-symposium
7) NOAA Report, Vol. IV, No 10, November 1995, URL: [web source no longer available]
8) D. C. McAdoo, K. M. Marks, “Gravity fields of the Southern Ocean from Geosat data,” Journal of Geophysical Research, Vol. 97, 1992, pp. 3247-3260
9) G. H. Born, J. L. Mitchell, G. A. Heyler, “Geosat ERM-Mission Design,” Journal of the Astronautical Sciences, Vol. 35, No 2, April 1987, pp. 119-134
10) W. H. F. Smith, D. T. Sandwell, “Global Sea Floor Topography from Satellite Altimetry and Ship Depth Soundings,” Science 277, 1956-1961, 1997
11) F. M. Monaldo,“Expected Differences Between Buoy and Radar Estimates of Wind Speed and Significant Wave Height and Their Implications on Buoy-Altimeter Comparisons,” Journal of Geophysical Research. Vol. 93, 1988, pp. 2285-2301
12) L. Miller, R. E. Cheney, B. C. Douglas, “Geosat Altimeter Observations of Kelvin Waves and the 1986-87 El Niño,” Science 239, 52-54 1988
13) D. B. Chelton, M. G. Schlax, D. L. Witter, J. G. Richman, “Geosat altimeter observations of the sea surface circulation of the southern ocean,” Journal of Geophysical Research, Vol. 95, 1990, pp. 17,887-17,903
14) D. T. Sandwell, W. H. F. Smith, “Bathymetric Estimation,” January 1999, URL: http://topex.ucsd.edu/marine_topo/chapter11/text.pdf
15) http://www.globalsecurity.org/space/systems/geosat.htm
16) https://repository.library.noaa.gov/view/noaa/23414
17) Bruce Shapiro, “The GEOSAT Orbit Adjust,” The Journal of the Astronautical Sciences, Vol. 36, No 4, Oct.-Dec. 1988, pp. 407-424, URL: http://biomathman.com/pubs/1988.JAS.pdf
18) http://science.nasa.gov/missions/geosat/
19) M. J. Gabor, J. C. Ries, “A Systematic Approach to the Precision Orbit Determination of the GEOSAT Exact Repeat Mission Utilizing TRANET Doppler Data,” Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Austin, TX, Feb. 12-15, 1996, Paper: AAS 96-166
20) http://nsidc.org/data/docs/daac/altimeter_instrument.gd.html
21) J. L MacArthur, P. C. Marth, Jr., J. G. Wall, “The GEOSAT Radar Altimeter,” Johns Hopkins APL Technical Digest, Volume 8, No. 2, April-June 1987
22) http://nsidc.org/data/docs/daac/geosat_platform.gd.html
23) D. B. Chelton (editor), “Report of the High-Resolution Ocean Topography Science Working Group Meeting,” College Park, MD, March 28-29, 2001, Report as of Oct. 2001, URL: [web source no longer available]
24) https://repository.library.noaa.gov/view/noaa/23414
25) D. R. Mantripp, J. K. Ridley, C. G. Rapley, “Antarctic map from the Geosat Radar Altimeter Geodetic Mission,” ESA Earth Observation Quarterly, No. 37-38, May-June 1992, pp. 6-10
26) J. Lillibridge, W. H. F. Smith, D. Sandwell, R. Scharroo, F. Lemoine, N. Zelensky, “20 Years of Improvements to GEOSAT Altimetry,” Symposium: 15 Years of Progress in Radar Altimetry, Venice, Italy, March 13-18, 2006, URL: https://earth.esa.int/eogateway/events/15-years-of-progress-in-radar-altimetry-symposium
27) “Global Seafloor Topography Measured & Estimated from gravity data derived from satellite altimetry and shipboard depth soundings,” 1997, World Data Center for Marine Geology & Geophysics, Boulder, Announcement 97-MGG-03, URL: http://www.ngdc.noaa.gov/mgg/fliers/97mgg03.html
28) Walter H. F. Smith, “Seafloor tectonic fabric from satellite altimetry,” Annual Review of Earth and Planetary Sciences, Vol. 26, pp. 697-747, May 1998, (doi:10.1146/annurev.earth.26.1.697)
29) D. T. Sandwell, W. H. F. Smith, “Exploring the ocean basins with satellite altimetry data,” URL: http://www.ngdc.noaa.gov/mgg/bathymetry/predicted/explore.HTML#fyi