GFO (GEOSAT Follow-On)
EO
Ocean
NASA
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | NASA |
| Mission status | Mission complete |
| Launch date | 10 Feb 1998 |
| End of life date | 22 Oct 2008 |
| Measurement domain | Ocean, Gravity and Magnetic Fields |
| Measurement category | Gravity, Magnetic and Geodynamic measurements, Ocean topography/currents |
| Measurement detailed | Sea level, Ocean dynamic topography, Gravity field |
| Instruments | LRA, TRSR, WVR, GFO-RA |
| Instrument type | Precision orbit, Radar altimeters, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See GFO (GEOSAT Follow-On) summary |
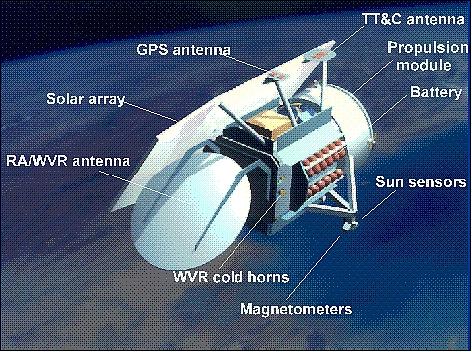
GFO (GEOSAT Follow-On) Satellite
GFO is the US Navy's initiative to develop an operational series of radar altimeter satellites to maintain continuous ocean observation - as obtained from the successful GEOSAT ERM (Exact Repeat Mission) mission phase. The GFO mission is managed by the METOC (Meteorological/Oceanographic) Program Office of SPAWAR (Space and Naval Warfare Systems Command) in San Diego, CA, with overall responsibility for executing the procurement of GFO.
The GFO mission objective is to provide operational altimetry data for the US Navy as well as for NOAA, NASA, and University ocean science and ocean monitoring. It is believed that ocean circulation may be a major cause of decadal climate change. Navy applications of GFO include the use of altimeter data in coastal oceanography, in mapping mesoscale fronts and eddies, and, in using basin-scale data for generating eddy-resolving global ocean models. 1) 2) 3) 4) 5)
Spacecraft
GFO is a minisatellite designed and built by BATC (Ball Aerospace & Technology Corporation) of Boulder, CO as the prime contractor (contract award in 1992) to SPAWAR. Subcontractors to Ball include: E-Systems Corporation (payload integration and fabrication of the altimeter), AIL Systems Inc. (manufacture of the microwave radiometer), AOA (formerly Allen Osborn Associates, manufacture of the GPS receiver), and Orbital Sciences Corporation (launch vehicle manufacture and operations). 6) 7) 8) 9)
GFO uses the BCP 600 bus (Ball Commercial Platform). The S/C structure consists of a conductive graphite composite with surface-mounted electronics that is compact and lightweight. The spacecraft is three-axis stabilized; attitude knowledge is derived from horizon scanners; sun sensors for yaw knowledge; attitude control accuracy is 0.25º (3σ); location knowledge by redundant GPS receivers with an rms accuracy of 10 cm (radial component); a Doppler beacon CW (Continuous Wave) transmitter is also carried to support orbit determination and time referencing of the altimeter data. A hydrazine propulsion system is used for orbit maintenance.
The spacecraft mass is 346 kg (dry) and 369 kg (wet), total payload mass of 47 kg, S/C design life = 8 years with a goal of 10 years; on-board recorder of 384 Mbit capacity; the spacecraft bus is 2.56 m in length and 0.78 m in diameter. The power subsystem employs a fully redundant power control and distribution unit, a NiH2 battery (20 Ah capacity) with a spare cell, and four radially deployed solar array panels totaling about 2.4 m2. S/C power of 319 W (single solar array with 1-axis articulation).
SoftRide isolation system flown on Taurus launch vehicles: GFO was the first US spacecraft which used the SoftRide isolation system of CSA Engineering to protect satellites from the rough ride into orbit, employing patented UniFlex isolators to reduce axial vibration. Since then, the SoftRide system has been used by many other missions such as: STEX, JawSat, MTI, MightySat, QuikTOMS, OrbView-4, XSS-11, FormoSat-3/COSMIC, TacSat-2, FalconSat-3, and AIM. 10)

Launch
The launch of GFO took place on Feb. 10, 1998 on a Taurus launcher (OSC) from VAFB (Vandenberg Air Force Base), CA. The international designation of GFO is 1998-007A.
Orbit: Non-sun-synchronous polar orbit providing an exact repeat ground track; inclination= 108.04º; mean altitude of 784 km (0.0008 eccentricity), repeat period = 101 minutes. The 17 day ERO (Exact Repeat Orbit - 244 orbits in 17 days) retraces the GEOSAT ERM ground track within ±1 km.
POD (Precise Orbit Determination): Unlike GEOSAT, GFO is tracked by two extremely accurate tracking systems: the SLR (Satellite Laser Ranging) network and the Global Positioning System (GPS). Accordingly, the spacecraft carries a laser retroreflector array (LRA) and Turbo-Rogue GPS receivers. These tracking data, especially in combination, support GFO orbit accuracies approaching those achieved on T/P (TOPEX/Poseidon) despite the lower altitude and increased atmospheric drag modeling errors.
Note: It turned out that the GPS system on GFO only supplied limited data, and could not be used for POD analysis. Hence, both the operational and precise orbits have been determined using a combination of satellite laser ranging (SLR) and Doppler tracking in combination with the use of altimeter crossovers. The estimated orbit precision of the daily orbits is between 10 and 20 cm, whereas the precise orbits have a precision of 5 cm.
RF communications: S-band downlink at 16 kbit/s (direct) and 512 kbit/s in dump mode to ground receiving stations. All data links to/from GFO are encrypted. The science data are being made available to the general user community through NOAA. Mission operations by NAVSOC (Naval Satellite Operations Center) with ground stations at Prospect Harbor, ME, and at Point Magu, CA. 11)
All payload data collected by the satellite is processed at the POC (Payload Operations Center) located at NavOceano (Naval Oceanographic Office). The resultant SDRs (Satellite Data Records) are sent to the ADFC (Altimeter Data Fusion Center) also located at NavOceano to be converted into the NGDRs. The Navy uses data from the GFO Doppler beacons to produce the “OpOrbits” for its Operational Navy Geophysical Data Records (NGDR-Os), and is using the NASA-generated Medium Laser orbit data to generate the NGDR-Ms.
GFO data: All GFO altimetry data has been authorized for unconditional (and unclassified) release by SPAWAR. Hence all GFO data [SDRs, GDRs (Geophysical Data Records) and raw data over some ice areas] is being forwarded to NOAA (and NASA) for distribution and use by the civilian community. NOAA also uses the SDRs along with the Medium Laser orbit data from NASA to produce an independent set of GDRs known as the IGDRs. 12)
US Navy ships receive real-time direct downlink data at sea while the stored worldwide data are available at CONUS (Continental United States - referring to the `lower 48 states') ground sites approximately every 12 hours. The stored data are sent to the NavOceano Altimetry Data Fusion Center (ADFC) located at NASA's Stennis Space Center, Mississippi for processing.
GFO altimeter data have many scientific applications, especially in combination with data from other missions such as Jason-1, Envisat, ERS: mapping of eddies; near-real-time monitoring for hurricane forecasts; inland lake monitoring; detection (ex post facto) of Indian Ocean tsunami.
Mission Status
• The Navy officially declared the GFO Mission was ended as of October 22, 2008 (decommissioned and passiviated). Due to increasing sun exposure (minimal eclipse), the temperature of the GFO platform increased to the point where normal operations were no longer feasible. The final step was to keep the radar altimeter (RA) off until after the "full sun" cycle. No GFO data was received after this date September 17, 2008. The decision was made to de-orbit the satellite at the end of 2008. 13) 14) 15)
GFO was maneuvered to a lower orbit to ensure reentry within 25 years. A series of eight burns in November 2008 dropped GFO’s orbit to 455 km x 785 km (estimated orbital lifetime: < 15 years). 16) 17)
• The spacecraft completed its 154 exact repeat orbit cycles in February 2008 (after 10 years in orbit) and has spent over seven years on orbit since acceptance of the satellite by the Navy. The GFO satellite continues to operate beyond its design life, providing meteorological and oceanographic (METOC) observation data critical to both naval planners and oceanographers. 18)
• The satellite is suffering from battery aging and the power consumption must be minimized when the satellite is in the eclipse phase of the orbit. This translates into partial ocean coverage (~50%) and hourly switches on/off of the altimeter (quite a brutal but mandatory treatment), with specific actions to optimize onboard power and temperature.
• As of Aug. 2006, the satellite had completed 120 exact repeat cycles since acceptance of the satellite by the Navy in 2000. An important lesson from GFO is that altimeter missions should always carry multiple means of tracking. Not only can they serve as a backup if one system fails, but the multiplicity of data types allows to directly intercompare orbits computed using different data and verify the orbit quality. 19)
• GFO is operational as of 2006. However, monitoring data indicate that the momentum wheel thermal sensitivity as well as the battery experience aging.
• As a result in part of the Cal/Val analysis, the GFO satellite was accepted by the US Navy and declared operational as of Nov. 29, 2000. 20)
• POD (Precision Orbit Determination) is now based on SLR (Satellite Laser Ranging) and on Doppler tracking. The GFO mission was rescued by the laser retroreflector and the demonstration of near-real-time POD using SLR, Doppler, and altimeter crossover data.
• Also, the CPU reset problems were solved in Nov. 1999. GFO encountered early difficulties with intermittent and periodic resets of its flight computer. To resolve the computer-reset problem, a series of software uploads were performed to update the on-board computer operating system.
• A ground-based time-tagging unit was installed at NAVSOC in June 1999.
• After launch of the S/C, the GFO project had undertaken extensive calibration and validation activities (Cal/Val I-IV) from June 1999 until October 2000. The GPS receivers onboard were not fully operational (the GPS receivers failed in spite of 4 unit redundancy; this meant loss of primary orbit determination system and the loss of precision time tagging), and therefore orbit determination now relies on satellite laser ranging and Opnet Doppler. 21) 22) 23) 24) 25)
Sensor Complement
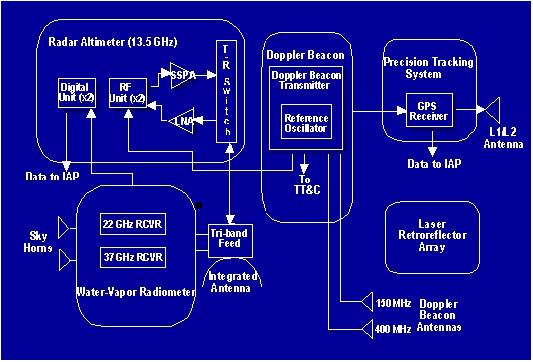
GFO-RA (GFO Radar Altimeter)
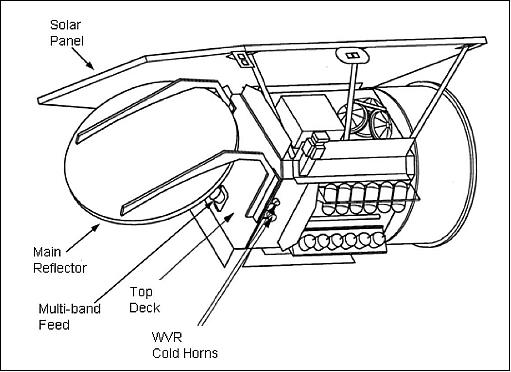
GFO-RA is a Ku-band instrument with a center frequency of 13.5 GHz, built by Raytheon's E-Systems Division, Lexington, MA. Range measurement between satellite and subsatellite point (at nadir) of the orbit with high measurement precision (range precision requirement of 3.5 cm). The GFO mission marks the first time that an Earth-orbiting microwave radiometer and radar have shared the same antenna. 26) 27)
GFO-RA consists of the following modules: RF Unit, Digital Unit, SSPA (Solid-State Power Amplifier), T/R Switch, combined GFO-RA/WVR feed horn, and integrated antenna. GFO-RA measures continuously along the subtrack with an approximately 2 km pulse-limited footprint. On-board calibration of radar cross section and height. Instrument mass = 24.7 kg; power=75.5 W; data rate = 8 kbit/s.

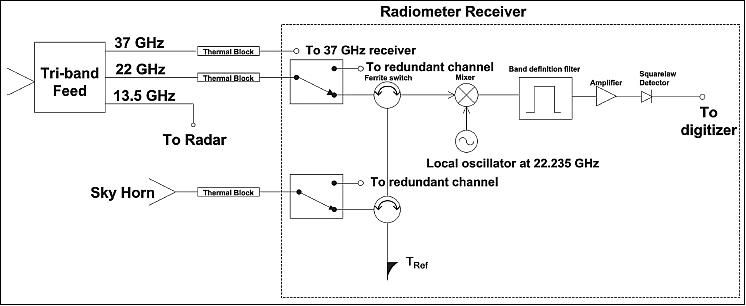
WVR (Water Vapor Radiometer)
WWR was built by AIL Systems Inc. of Deer Park, NY. Objective: Measurement of the water vapor content along the altimeter pulse path. WVR is a dual-frequency instrument (22 GHz and 37 GHz) that provides water vapor time corrections for the altimeter. The instrument consists of the electronics module, power supply, cold horns, combined GFO-RA/WVR feed horn and integrated antenna (the multiband feed and main reflector are shared by the two-channel WVR and the single-channel radar altimeter). The WVR data rate = 160 bit/s. 28) 29) 30)
TRSR (TurboRogue Space Receiver)
TRSR is a redundant GPS receiver system (4 receivers each of 16 channels) being used for precision orbit determination. TRSR was built by Allen Osborne Associates Inc. of Westlake Village, CA.
Note: Shortly after launch, the onboard Turbo-star 16-channel GPS receivers failed to track more than one GPS satellite on both frequencies. The fact that the GPS receiver onboard of GFO is not fully operational has prompted the use of satellite laser ranging (SLR) tracking data for the computation of precise orbits. 31)
The project computed alternative precise orbits using SLR and crossover data primarily for independent accuracy verification purposes. The average SLR residual is around 4 cm rms and crossover residual is about 8 cm rms during the calibration, validation and operational time periods.
LRA (Laser Retroreflector Array)
LRA is a corner cube reflector assembly provided by NASA for SLR tracking services. GFO POD relies on SLR tracking provided by a global network of NASA and foreign stations. 32)
References
1) R. Barry, “The GEOSAT Follow-On (GFO) Program Satellite,” Space Programs and Technologies Conference and Exhibit, Huntsville, AL, Sept 21-23, 1993, AIAA-1993-4106
2) D. Walker, R. Barry, “The Navy GEOSAT follow-on altimeter-a true dual use technology,” Proceedings of the IEEE Aerospace Conference, Aspen, CO, USA, Feb. 1-8, 1997, Vol. 3, pp. 71-82
3) John Lillibridge, Stephane Calmant, Gabriel Lellouch, “Geosat Follow-On Waveforms: Retracking for Hydrology Applications,” Symposium: 15 Years of Progress in Radar Altimetry, Venice, Italy, March 13-18, 2006, URL: http://ibis.grdl.noaa.gov/SAT/gfo/venice_gfo_waveforms_fin.ppt
4) F. G. Lemoine, N. P. Zelensky, D. S. Chinn, B. D. Beckley, J. L. Lillibridge, “Towards the GEOSAT Follow-On Precise Orbit Determination Goals of High Accuracy and Near-Real-Time Processing,” AIAA/AAS Astrodynamics Conference, Keystone, CO, USA, August 21-24, 2006 , URL: http://ibis.grdl.noaa.gov/SAT/gfo/aiaa2006gfopres.ppt
5) P. Moorea, G. T. Kilby, “Orbital inferences from GFO with applications to GEOSAT,” Advances in Space Research, Volume 30, Issue 2, July 2002, pp. 393-399
6) F. G. Lemoine, N. P. Zelensky, D. S. Chinn, B. D. Beckley, J. L. Lillibridge, “Towards the GEOSAT Follow-On Precise Orbit Determination Goals of High Accuracy and Near-Real-Time Processing,” AIAA/AAS Astrodynamics Specialist Conference, August 21-24, 2006, Keystone, CO, USA, paper: 2006-6402, URL: http://ilrs.gsfc.nasa.gov/docs/aiaa2006gfo.pdf
7) http://www.ballaerospace.com/file/media/gfo.pdf
8) “GFO Mission Overview,” URL: http://ibis.grdl.noaa.gov/SAT/gfo/bmpcoe/Mission/missiona.htm
9) “The GFO Spacecraft and Mission Design,” URL: http://ibis.grdl.noaa.gov/SAT/gfo/bmpcoe/Mission/missiond.htm
10) P. S. Wilke, C. D. Johnson, “GFO/Taurus Whole-Spacecraft Vibration Isolation System,” Proceedings of the AIAA/USU Small Satellite Conference, Logan UT, USA, 1998, SSC98-III-1
11) Information provided by B. Barry of Ball Aerospace, Boulder, CO, and by Ch. Kilgus of JHU/APL
12) http://ibis.grdl.noaa.gov/SAT/gfo/
14) http://www.aviso.oceanobs.com/en/news-storage/news-detail/...
15) “Program and Operations Status Report,” Jan. 2, 2009, URL: http://ibis.grdl.noaa.gov/SAT/gfo/bmpcoe/Exec_col/exec_col.htm
16) “Two Old Spacecraft Successfully Retired,” NASA, 'Orbital Debris Quarterly Newsletter,' Vol. 13, Issue 4, Oct. 2009, http://orbitaldebris.jsc.nasa.gov/newsletter/pdfs/ODQNv13i4.pdf
17) Angela L. Monheim, Lance Pritikin, Greg Mayer, Gerardo San Juan, Ryan Palmer, Kevin Miller, “GFO: Disposal of a Power-Challenged Satellite with an Attitude (Control) Problem,” AIAA Space 2009 Conference & Exposition, Sept. 14-17, 2009, Pasadena, CA, USA, AIAA 2009-6420
18) “Ball Aerospace GFO Satellite Begins Eleventh Year On Orbit,” April 10, 2008, Space Mart, URL: http://www.spacemart.com/reports/...
19) Frank G. Lemoine, Nikita P. Zelensky, Douglas S. Chinn, Brian D. Beckley, John L. Lillibridge, “Towards the GEOSAT Follow-On Precise Orbit Determination Goals of High Accuracy and Near-Real-Time Processing,” AIAA/AAS Astrodynamics Conference, Keystone, Colorado, August 21-24, 2006, AIAA Paper 2006-6402, presentation URL: http://ilrs.gsfc.nasa.gov/docs/aiaa2006gfopres.pdf, paper URL:ftp://cddis.nasa.gov/misc/aiaa2006gfo.pdf
20) David W. Hancock III, George S. Hayne, Ronald L. Brooks, Dennis W. Lockwood, “GEOSAT Follow-On (GFO) Altimeter Document Series,” Volume 1, GFO Altimeter Engineering Assessment Report From Launch to Acceptance 10 February 1998 to 29 November 2000, Version 1.0, NASA/TM--2001-209984/VER1/VOL. 1 URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20010066907_2001108173.pdf
21) C. Shum, Y. Yi, C. Zhao, J. Finkelstein, D. Hancock, S. Klingenberger, J. Lillibridge, M. Rau, “Calibration and Validation of GFO Radar Altimeter Data,” Proceedings of EGS (European Geophysical Society) XXVI General Assembly, Nice, France, March 25-30, 2001
22) D. W. Hancock III, G. S. Hayne, D. W. Lockwood, “GFO Radar Altimeter Performance,” June 12, 2001, URL: http://ibis.grdl.noaa.gov/SAT/gfo/gfo_010612/gfo_010612_hancock.pdf
23) C. Zhao, C. Shum, Y. Yi, P. Luk, J. Finkelstein, J. Lillibridge, J. McMillan, M. Rau, “GFO radar altimeter data product verifications and ocean circulation studies,” IAG (International Association of Geodesy) Scientific Assembly, `Vistas for Geodesy in the New Millennium,' Budapest, Hungary, September 2-7, 2001
24) J. Lillibridge, S. Calmant, G. Lellouch, “Geosat Follow-On Waveforms: Retracking for Hydrology Applications,” Symposium: 15 Years of Progress in Radar Altimetry, Venice, Italy, March 13-18, 2006
25) F. G. Lemoine, N. P. Zelensky, D. S. Chinn, B. D. Beckley, J. L. Lillibridge, “Towards the GEOSAT Follow-On Precise Orbit Determination Goals of High Accuracy and Near-Real-Time Processing,” AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Aug. 21-24, 2006, Keystone, CO, USA, paper: AIAA 2006-6402
26) C. S. Ruf, A. M. Warnock, “GEOSAT Follow-On Water Vapor Radiometer: Performance With a Shared Active/Passive Antenna,” Transactions on Geoscience and Remote Sensing, IEEE, Vol. 45, Issue 4, April 2007 pp. 970 - 977
27) “GeoSat Follow-On METOC Satellite,” http://enterprise.spawar.navy.mil/UploadedFiles/gfo_fs.pdf
28) C. S. Ruf, A. M. Warnock, “GEOSAT Follow-On Water Vapor Radiometer: Performance With a Shared Active/Passive Antenna,” IEEE Transactions of Geoscience and Remote Sensing, Vol. 45, No 4, 2007, pp. 970-977, http://ktb.engin.umich.edu/RSG/pubs_files/TGRS-2007-45-4_Ruf-and-Warnock_GFO-WVR.pdf
29) C. Ruf, “GFO Water Vapor Radiometer Performance Assessment,” GFO Cal/Val Meeting, June 12, 2001, URL: http://ibis.grdl.noaa.gov/SAT/gfo/gfo_010612/gfo_010612_ruf.ppt
30) M. E. Malik, “GFO Water Vapor Radiometer,” URL: http://pdf.aiaa.org/preview/1993/PV1993_4230.pdf
31) Changyin Zhao, CK Shum, Yuchan Yi, “Calibration Results of GFO,”International Association of Geodesy Symposia, Vol. 126, International Workshop on Satellite Altimetry, URL: http://bilder.buecher.de/zusatz/14/14813/14813470_lese_1.pdf
32) N. P. Zelensky, D. D. Rowlands, F. G. Lemoine, D. S. Chinn, S. B. Luthcke, G. C. Marr, “Precise Orbit Determination for the GEOSAT Follow-On Spacecraft,” 12th International Workshop on Laser Ranging (ILRS), Nov. 13-17, 2000, Matera, Italy, URL: http://cddis.gsfc.nasa.gov/lw12/docs/Zelensky_et_al_GEOSAT.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).