GMS (Geostationary Meteorological Satellite)
EO
JAXA
Atmosphere
Ocean
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA |
| Mission status | Mission complete |
| Launch date | 03 Aug 1984 |
| End of life date | 01 Jun 2005 |
| Measurement domain | Atmosphere, Ocean |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Surface temperature (ocean), Atmospheric Humidity Fields, Atmospheric Winds |
| Measurement detailed | Precipitation intensity at the surface (liquid or solid), Cloud type, Atmospheric specific humidity (column/profile), Sea surface temperature, Wind profile (horizontal), Wind speed over land surface (horizontal) |
| Instruments | DCS (JAXA), VISSR (GMS-4), VISSR (GMS-5), GMS Comms |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Communications, Data collection |
| CEOS EO Handbook | See GMS (Geostationary Meteorological Satellite) summary |
GMS (Geostationary Meteorological Satellite) Series of Japan
GMS was Japan's first national satellite program for weather and environmental observations from GEO (Geostationary Earth Orbit). It was administered in partnership by JMA (Japan Meteorological Agency) as the operator of the satellites, and by JAXA (formerly NASDA) as the spacecraft and launch service provider (originally, NASDA was also the spacecraft operator). In Japan, the GMS program was also known by the name of Himawari (sunflower). The GMS program called for one operational spacecraft in orbit on the basis of a continuous service provision for the series. The operational meteorological program series consisted of the following satellites:
S/C | Launch date | Launch vehicle | GEO location | S/C on-orbit mass at BOL |
GMS-1 F1 | July 14, 1977 | NASA Delta 2914 vehicle from KSC, FLA | 140º E, de-orbit Jan. 26, 2001 | 325 kg |
GMS-2 F2 | Aug. 11, 1981 | N-II vehicle of NASDA | 140º E, | 296 kg |
GMS-3 | Aug. 3, 1984 | N-II vehicle of NASDA | 140º E | 303 kg |
GMS-4 | Sept. 6, 1989 | H-I vehicle of NASDA | 140º E | 325 kg, operations until Feb. 2000 |
GMS-5 | Mar. 18, 1995 | H-II vehicle, NASDA | 140º E | 344 kg, 747 kg (at launch) |
The mission objectives of the GMS program are:
1) Weather watch by VISSR: a) imaging the Earth's surface, cloud distribution and atmospheric water vapor distribution, and observation of meteorological phenomena such as typhoons, cyclones, fronts, etc. b) meteorological parameter extraction such as temperature on both Earth surface and cloud tops, cloud top height, cloud amount, cloud motion, etc.
2) Collection of meteorological data from DCPs (Data Collection Platforms) installed on ships, buoys, aircraft, and other land weather stations.
3) Direct broadcast of cloud images: a) dissemination of digital image data (stretched VISSR data) via satellite repeater to MDUS (Medium Scale Data Utilization Station) users. b) dissemination of analog processed image data (WEFAX data) via satellite to SDUS (Small Scale Data Utilization Station) users.
4) Monitoring of solar particles.
Observation/service coverage of GMS program. Meteorological data is provided for the Asia-Pacific Region which includes Japan, Australia, parts of China, Korea, and Oceania (Burma, Indonesia, Laos, Malaysia, Mongolia, New Zealand, the Philippines, Taiwan, Thailand, Tibet, and Vietnam). The VISSR imagery coverage extends roughly from ±60º in latitude and from 80º E to 160 W in longitude. In addition, the GMS satellite data represent an important link and an integral part in the WWW (World Weather Watch) program, sponsored by the World Meteorological Organization (WMO).
Launch
All GMS series spacecraft, except GMS-1, were launched from TNSC (Tanegashima Space Center), NASDA's launch site on Tanegashima Island, Japan, located at 30.4º N, 131.0º E.
Orbit: GEO (Geostationary Earth Orbit) at 140º E longitude.
Spacecraft
All GMS spacecraft were built for JAXA (former NASDA) by BSS [Boeing Satellite Systems - the former Hughes Space and Communications Company (HSC)], El Segundo, CA, in close cooperation with NEC (Nippon Electric Company) Corporation of Tokyo (NEC was actually the prime contractor to NASDA). The development of the GMS series relied heavily on the early US GOES series design.
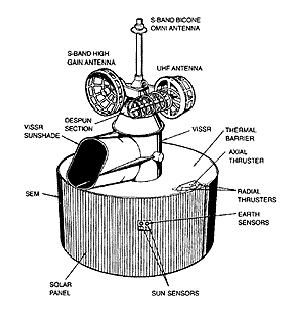
All GMS spacecraft are spin-stabilized. The GMS-5 satellite has a launch mass of 725 kg (satellite diameter = 214.6 cm, height = 345 cm); the on-orbit mass is 344 kg at BOL. The spacecraft consists of a despun Earth-oriented antenna assembly and a spinning section rotating at 100 rpm. The observation payload and its supporting subsystems are part of the spinning section of the spacecraft. Attitude information is provided by Earth horizon and sun sensors. Solar cells applied to the exterior of the spacecraft bus generate up to 300 W of power. The design life is 5 years. Hydrazine thrusters maintain the desired geostationary position and counteract perturbations attempting to alter the vehicle's inclination. 1) 2) 3) 4)

RF communications: Despun S-band and UHF antennas provide high gain for on-orbit communications with the ground stations. The spacecraft transmits its VISSR data to JMA (Japan Meteorological Agency). 5)
The helical antenna in UHF band is used for the reception of the DCP data and S&R signals and the transmission and reception of Tsunami warnings. The omni-directional antenna in S-band is used for TT&C (Tracking Telemetry and Command). The despun-controlled parabolic antenna in S-band is used for the transmission of the VISSR raw data, the dissemination of S-VISSR and WEFAX, the transmission of DCP data and S&R signals as well as TT&C including the trilateral ranging.
The GMS satellite series is being operated by the MSC (Meteorological Data Center) of JMA.
Sensor Complement
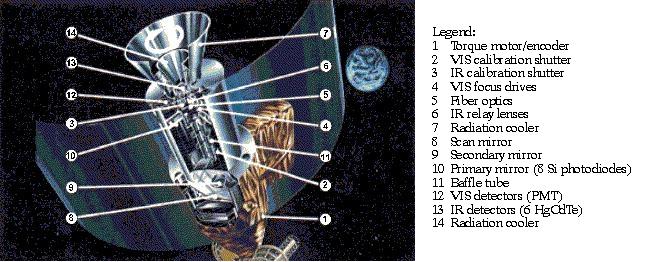
VISSR (Visible and Infrared Spin-Scan Radiometer)
VISSR was built by former Hughes SBRC (Santa Barbara Research Center), now Raytheon SBRS (Santa Barbara Remote sensing). VISSR consists of the following elements: an optical telescope with a scan mirror, reflectors and lenses, together with the visible (VIS) and infrared (IR) detectors and the radiation cooler. The optical axis of VISSR is in line with the spacecraft mechanical centre axis. The spinning motion allows the VISSR to scan the earth scene west-to-east, one scan during each revolution.
The VISSR is used to obtain visible and infrared spectrum mappings of the Earth and its cloud cover. Four photomultiplier tube detectors (PMTs) and redundant sets convert the visible spectra into four-channel analog signals. A cooled (95 K) HgCdTe detector (also redundant) converts infrared spectra into an infrared signal (10.5-12.5 µm) at 5 km resolution. The resulting data stream is then fed into the VISSR Digital Multiplexer (VDM) unit.
For the GMS-5 mission, the VISSR instrument received an additional water vapor channel (6.5 - 7.0 µm); furthermore, the original infrared channel was split into two channels (10.5 - 11.5 and 11.5 - 12.5 µm). The visual sensor array of 4 sensors captures an image of 13376 x 10000 pixels with 6 bit data quantization. Each of the infrared sensors captures an image of 6688 x 2500 pixels with 8 bit depth.
A complete 20º x 20º scan area to cover the full Earth disk can be accomplished in 30 minutes utilizing the GMS's 100 rpm spin motion for west-east scans and 2500 steps (140 µrad each) of motor-actuated VISSR mirror scan for north-south scans. Imaging takes 25 minutes, mirror retrace another 2.5 minutes, and a spacecraft stabilization 2.5 minutes.
Parameter | GMS-5 | Comment | GMS-4 |
Spectral bands: (4) |
|
|
|
Resolution | 1.25 km for VIS band | At nadir | 1.25 km for VIS band |
Data quantization | 6 bit for VIS band |
| 6 bit for VIS band |
Parameter | VIS band | Infrared | WV (Water Vapor) |
Spectral band | 0.55-0.75 µm | 10.5-12.5 µm | 6.2-7.6 µm |
No of detectors/channel | 4 (+spare) | 1 (+1 spare) | 1 (+1 spare) |
Scan lines | 2500 x 4 | 2500 | 2500 |
Spatial resolution | 1.25 km x 1.25 km | 5 km x 5 km | 5 km x 5 km |
Detectors | Si photodiode | HgCdTe | HgCdTe |
Data quantization | 6 bit | 8 bit | 8 bit |
Noise performance | SNR=6.5 (albedo=2.5%) | NEDT = 0.5-0.65 K | NEDT = 1 K |
Scan step increment | 140 µrad (N-S scanning) | ||
Temporal resolution | 30 minutes (frame time) | ||

VDM (VISSR Digital Multiplexer). VDM is a high-speed pulse code modulation (PCM) encoder. It converts VISSR signals into digital form and multiplexes them with image and message synchronization data.
SEM (Space Environment Monitor)
SEM is a NOAA sensor. Spectral bands: 1 - 500 MeV (protons); 8 - 390 MeV (alpha particles); >2 MeV (electrons). SEM measures three kinds of solar particles: protons, alpha particles, and electrons.
DCS (Data Collection System)
The GMS DCS provides operational collection services for data collection platforms in the ground segment within its field of view. The overall system is composed of the following subsystems:6)
1) The space segment: a DCS platform on GMS satellites consisting of: a UHF/S-band transponder, a mechanically despun S-band antenna, and a UHF receive antenna.
2) The deployed DCPs (Data Collection Platforms) in the ground segment
3) The ground-based MSC (Meteorological Satellite Center).
The DCS on-board GMS provides a transponder with a passband that is divided into 133 communication channels separated at intervals of 3 kHz. The system has the ability of simultaneous communication through all channels. The 133 channels are divided into two blocks: 100 are for regional use, and 33 are for international use. Each DCP is allocated one of the 133 parallel channels. Since the DCPs transmit either according to a schedule, or under `alert' conditions, many platforms can use a single 3 kHz channel sequentially. A message from a DCP in the ground segment is relayed via the GMS on-board DCS to a ground-based MSC which is responsible for the coverage area. - The platforms (DCPs) transmit (uplink) their data in the 402 MHz UHF band to the GMS on-board DCS, where it is converted to S-band (1694 MHz) and retransmitted (downlinked) to a ground facility CDAS (Command and Data Acquisition Station) and relayed via GTS to MSC. There, the DCP messages are collected, processed, disseminated, formatted into bulletins and distributed via GTS to the platform owners.
As of the end of 1995, 448 DCPs in the ground segment are regularly serviced by GMS. The DCPs which can be operated by the system are of two types:
• self-timed DCPs which transmit their data automatically at preset time slots driven by an internal stable clock
• interrogational DCPs which transmit their data only when an interrogation command is received at the DCP.
The GMS DCS is part of an international network in the framework of WWW (together with Meteosat and GOES series satellites); this allows a further classification:
• International DCPs (IDCPs) which are mobile (Lagrangian type free-floating in the medium) and whose data may be collected by any one of the satellite operators. The allocated frequency band for the IDCP operation is 402.0-402.1 MHz for the uplink and 1694.3-1694.4 MHz for the downlink.
• Regional DCPs (RDCPs) which are under the responsibility of and operated by a specific satellite operator. The allocated frequency band for the RDCP operation is 402.1 - 402.4 MHz for the uplink and 1694.4 - 1694.7 MHz for the downlink.
The data transmission rate for both types of platforms is 100 bit/s.
Communication Link | UHF (Uplink to GMS DCS) | S-band (DCS downlink) |
Frequency | 402.0-402.4 MHz | 1694.3-1694.7 MHz |
Type of modulation | PCM/PSK (±60º) | PCM/PSK (±60º) |
EIRP | 43.0 dBm | 11.3 dBm |
Free space loss | 176.7 dBm | 188.3 dBm |
RCVR off-beam loss | 0.4 dB | 0.6 dB |
GMS-5
Background: GMS-5, with a design life of 5 years, was due to be replaced by a satellite called MTSAT (Multifunction Transport Satellite) in November 1999; however, the launch vehicle (H-II) for MTSAT failed and the satellite was destroyed. This mishap implied an immediate new order and manufacturing start for a replacement of MTSAT. In addition, significant efforts to extend the usable life of GMS-5 were implemented by JMA in July 2001, so that it operated for more than 3 years beyond its design life.
JMA negotiated with NOAA, the US National Oceanic & Atmospheric Administration, for GOES-9 to be moved over the Western Pacific to provide images in place of the ailing GMS-5 spacecraft until the launch of replacement. The replacement is a new Japanese satellite called MTSAT-1R (Multifunction Transport Satellite-1 Replacement), which is expected to become operational in 2005. - GOES-9, also launched in 1995, was removed by NOAA from operational service in July 2002, because it did not meet anymore US weather forecasting requirements. But GOES-9 still did have sounding and limited imaging capabilities which could supply data comparable to that of the GMS-5 spacecraft.
In May 2002, NOAA announced that the US had agreed to lend Japan a geostationary environmental satellite to ensure that weather data from the Western Pacific are available continuously should the weakening Japanese satellite fail. GOES-9 could be placed in an orbit over the Western Pacific region. - In April 2003, GOES-9 assumed its new GEO position at 155º E. 7)
• In April/May 2003, JMA started backup operations of GMS-5 with the GOES-9 spacecraft, in cooperation with NOAA/NESDIS.
• GMS-5 made its final observation at 00 UTC on 22 May 2003.
• A launch of MTSAT-1R took place on Feb. 26, 2005.
• On June 28, 2005, the geostationary meteorological satellite of Japan was switched over from GOES-9 to Himawari-6 (MTSAT-1R). 8)
Parameter | GMS-5 | GOES-9 |
Visible VIS | 0.50-0.75 µm | 0.55-0.75 µm |
Thermal Infrared 1 (TIR1) | 10.5-11.5 µm | 10.2-11.2 µm |
Thermal Infrared 2 (TIR2) | 11.5-12.5 µm | 11.5-12.5 µm |
Infrared 3 (water vapor) | 6.5-7.0 µm | 6.5-7.0 µm |
Shortwave Infrared (SWIR) | - | 3.8-4.0 µm |
S/C location | 140º E | 155º E |

References
1) M. Homma, M. Minowa, M. Kobayashi, M. Harada, “Geostationary Meteorological Satellite System in Japan” in `Monitoring Earth's Ocean, Land, and Atmosphere from Space,' Volume 97 AIAA, 1985, pp. 570-583
2) “Japan's Geostationary Meteorological Satellites,” Boeing Company, http://www.boeing.com/defense-space/space/bss/factsheets/376/gms/gms.html
3) http://www.jaxa.jp/projects/sat/gms/index_e.html
4) Nobuhiko Kodaira, “The performance of GMS (Himawari) for 2 years duration,” Acta Astronautica, Volume 7, Issues 8-9, August-September 1980, pp. 1021-1026
5) Geostationary Meteorological Satellite-5 [Himawari-5], technical brochure of NASDA, 1991.
6) Information provided by T. Hiraki of JMA, Tokyo
7) “NOAA to move GOES-9 to back up Japanese Weather Satellite - Move ensures continuity of weather information across Western Pacific,” NOAA Press Release, May 22, 2003, URL: http://www.publicaffairs.noaa.gov/releases2003/mar03/noaa03031.html
8) http://agora.ex.nii.ac.jp/~kitamoto/research/rs/gms-goes.html.en
9) http://www.jma.go.jp/jma/jma-eng/satellite/history.html
10) http://mscweb.kishou.go.jp/general/outline/history/index.htm
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).