GOMX-1 (GomSpace Express-1)
EO
Operational (nominal)
GomSpace
Quick facts
Overview
| Mission type | EO |
| Agency | GomSpace |
| Mission status | Operational (nominal) |
| Launch date | 21 Nov 2013 |
| CEOS EO Handbook | See GOMX-1 (GomSpace Express-1) summary |
GOMX-1 (GomSpace Express-1)
Overview Spacecraft Launch Mission Status Sensor Complement References
GomSpace is a university spin-off company, founded in 2007 with roots from Aalborg University, Aalborg, Denmark. The development project for the satellite was named GATOSS (Global Air Traffic Awareness and Optimizing through Spaceborne Surveillance), but the satellite mission is officially registered as GOMX-1. 1)
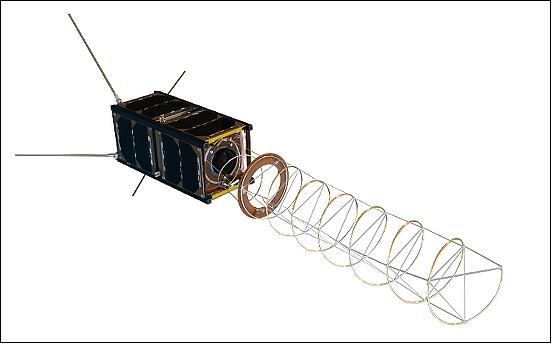
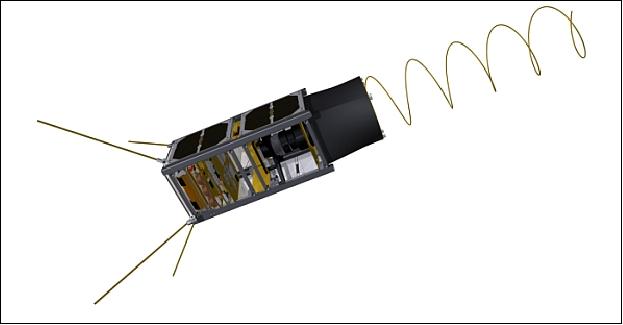
GOMX-1 is nanosatellite demonstration mission of GomSpace, based on a two unit (2U) GomSpace Express (GOMX) CubeSat platform that provides a payload capacity of 1.2 kg in a volume corresponding to the upper 14 cm of the platform.
The GOMX platform is a commercially available 2U CubeSat kit provided by GomSpace ApS of Aalborg, Denmark. GomSpace is an entrepreneurial company incorporated as a private limited company . The platform is ideal for cost-effective missions focusing on technological research, low-cost science and commercial proof-of-concept missions. The GOMX (GomSpace Express) platform serves as a customer tool for developing space technology capacity. 2) 3) 4) 5)
GOMX-1 is a 2U CubeSat mission developed in collaboration between GomSpace, DSE Airport Solutions of Aalborg, and Aalborg University to perform research and experimentation in space related to SDR (Software Defined Radio) with emphasis on receiving ADS-B (Automatic Dependent Surveillance-Broadcast) signals from commercial aircraft over oceanic areas. As a secondary payload the satellite flies a NanoCam C1U color camera for Earth observation experimentation.
The ADS-B signal is in use today for air traffic control in areas covered by terrestrial based receivers, but is currently not of use over the oceans due to its limited range. The GomX-1 satellite with its sensitive SDR (Software Defined Radio) payload will be the first demonstration that the ADS-B signals can be received from space and utilized to provide increased global situational awareness for key stakeholders in air traffic control.
The GOMX-1 mission is managed by GomSpace, who are in charge of launch procurement, bus design, operations & lead payload development. Aalborg University in Denmark contributes to the payload design with focus on implementation of software defined radio techniques for data decoding. Finally, DSE Airport Solutions of Aalborg are in charge of developing software for in-orbit performance evaluation.
Spacecraft
The baseline configuration of the GOMX-1 nanosatellite is a 10 cm x 10 cm x 20 cm 2U standard platform with a mass of up to 2.66 kg. One half of the satellite volume is dedicated for platform subsystems, while the second half is dedicated for payloads. The secondary payload for the satellite is an imaging system developed by GomSpace for small earth observation missions and provides a 35 m resolution at an orbit altitude of 600 km in the configuration carried on GOMX-1.
The GOMX platform is modular and flexible, considered to be a robust and proven bus for research and development of new satellite technology. It can be modified to suite the particular needs of the customer with easy integration leveraged by the Cubesat Space Protocol (CSP) that is implemented on all GomSpace systems. The GOMX platform is supplied with documentation software options for CDH (Commands and Data Handling) and ADCS (Attitude Determination and Control Subsystem) libraries available to costumers, specifically this means that customers are able to:
- Modify and learn from flight-code of all systems
- Install their own payloads; a volume of 9 cm x 9 cm x 12 cm is available
- Replace platform subsystems with their own and/or add new systems.

The platform features an in-orbit reprogrammable on-board computer with up to 2 GB of data-storage, ample processing power, and flexible software for supporting the mission. The RF communication system is based on a half-duplex UHF transceiver using AFSK modulation up to 9.6 kbaud employing encoding with FEC (Forward Error Correction) and Reed-Solomon coding to increase the link reliability.
EPS (Electric Power Subsystem): The EPS employs triple-junction cells and uses maximum power-point tracking for each panel to maximize power production. Surplus power is stored in Lithium-Ion batteries rated for human space flight by NASA and ESA. In addition the power system provides latch-up protection of all subsystems. The system can provide an average of no less than 1.33 W for the payloads on a 1U platform.
The NanoPower P-series power supplies are designed for small, low-cost satellites with power demands from 1-30 W. Employing a strictly KISS design philosophy, the NanoPower interfaces to the solar panels and uses highly efficient converters to condition the output power in order to charge the provided lithium-ion batteries. 6)
ADCS (Attitude Determination and Control Subsystem): ADCS determines the attitude from a magnetometer and sun sensors, and is actuated using magnetic coils. The system provides a nadir pointing mode and an inertial pointing mode. The pointing accuracy is 10º.
The on-board computing is handled by the NanoMind A712 OBC. The main objective of the NanoMind is ADCS processing, this is because of the CSP (Cubesat Space Protocol) and the distributed network implemented on all GomSpace systems. The NanoMind interfaces to all sensors and actuators onboard the GOMX-platform and also performs tasks like storing housekeeping data from all subsystems.
Following in-orbit verification in November 2013, further development activities will aim at increasing the level of configuration options available for the GOMX platform. Specific first goals are to provide options for more capable communication and attitude control systems.
RF communications: GOMX-1 is using a radio amateur frequency, which makes it possible for any radio amateur to receive the satellite telemetry. NanoCom U482C is a half-duplex UHF transceiver operating in the 435-438 MHz amateur radio band. It includes baseband processing and communicates via I2C to the platform. NanoCom products implements FEC (Forward Error Correction) and Viterbi coding based on the CCSDS standards in order to improve reliability and throughput of the space link. 7)
GomX-1 uses 4800 baud MSK (Minimum Shift Keying) modulation at the two tones 2400 and 4800. This mode is not supported by most major TNC providers.
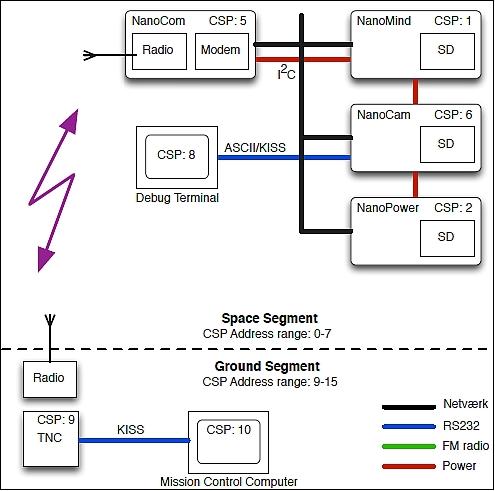
CSP (CubeSat Space Protocol): A key distinguishing feature of the architecture is the use of the CSP – a service oriented network protocol implemented on all the subsystems and extending transparently across the space link to the ground segment. CSP is developed in collaboration between Aalborg University and GomSpace and is available as open source. 8)
This “mission internet” provided by CSP, and the design philosophy behind it, makes it very easy to integrate and test systems – the process is referred to as “One- Step Integration” and offers much more flexibility than a typical star-topology with the OBC (On-Board Computer) in the middle as the facilitator of all communication.
With CSP, all subsystems are autonomous nodes that can access and command resources available on the network. Further “virtual subsystems” exists such as e.g. the system-wide logging service that is a software task on the OBC with its own network address. 9)
Launch
GOMX-1 was launched on Nov. 21, 2013 as a secondary payload on a Dnepr vehicle from the Dombarovsky (Yasny Cosmodrome) launch site in Russia. The launch provider was ISC Kosmotras. The primary payloads on this flight were DubaiSat-2 of EIAST (300 kg) and STSat-3 of KARI, Korea (~150 kg). 10) 11) 12)
Secondary Payloads
• SkySat-1 of Skybox Imaging Inc., Mountain View, CA, USA, a commercial remote sensing microsatellite of ~100 kg.
• WNISat-1 (Weathernews Inc. Satellite-1), a nanosatellite (10 kg) of Axelspace, Tokyo, Japan.
• BRITE-PL-1, a nanosatellite (7 kg) of SRC/PAS (Space Research Center/ Polish Academy of Sciences of Warsaw, Poland.
• AprizeSat-7 and AprizeSat-8, nanosatellites of AprizeSat. AprizeSat-7 and 8 are the ninth and tenth satellites launched as part of the AprizeSat constellation, operated by AprizeSat. The constellation, which was originally named LatinSat, was initially operated by Aprize Argentina; however ownership of the constellation was later transferred to their US parent company AprizeSat. The AprizeSat constellation is used for store-dump communications, and some satellites carry AIS (Automatic Identification System) payloads for Canadian company ExactEarth. The AprizeSat spacecraft were built by SpaceQuest Ltd. Of Fairfax, VA, USA, and each has a mass of 12 kg. 13)
• UniSat-5, a microsatellite of the University of Rome (Universita di Roma “La Sapienza”, Scuola di Ingegneria Aerospaziale). The microsatellite has a mass of 28 kg and a size of 50 cm x 50 cm x 50 cm. When on orbit, UniSat-5 will deploy the following satellites with 2 PEPPODs (Planted Elementary Platform for Picosatellite Orbital Deployer) of GAUSS:
- PEPPOD 1: ICube-1, a CubeSat of PIST (Pakistan Institute of Space Technology), Islamabad, Pakistan; HumSat-D (Humanitarian Satellite Network-Demonstrator), a CubeSat of the University of Vigo, Spain; PUCPSat-1 (Pontificia Universidad Católica del Perú-Satellite), a 1U CubeSat of INRAS (Institute for Radio Astronomy), Lima, Peru; Note: PUCPSat-1 intends to subsequently release a further satellite Pocket-PUCP) when deployed on orbit. 14)
- PEPPOD 2: Dove-4, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
MRFOD (Morehead-Roma FemtoSat Orbital Deployer) of MSU (Morehead State University) is a further deployer system on UniSat-5 which will deploy the following femtosats:
- Eagle-1 (BeakerSat), a 1.5U PocketQube, and Eagle-2 ($50SAT) a 2.5U PocketQube, these are two FemtoSats of MSU (Morehead State University) and Kentucky Space; Wren, a FemoSat (1U PocketQube) of StaDoKo UG, Aachen, Germany; and QBSout-1S, a 2.5U PocketQube (400 g) of the University of Maryland testing a finely pointing sun sensor.
• Delfi-n3Xt, a nanosatellite (3.5 kg) of TU Delft (Delft University of Technology), The Netherlands.
• Triton-1 nanosatellite (3U CubeSat) of ISIS-BV, The Netherlands
• CINEMA-2 (KHUSat-1) and CINEMA-3 (KHUSat-2), nanosatellites (4 kg each) developed by KHU (Kyung Hee University), Seoul, Korea for the TRIO-CINEMA constellation. TRIO-CINEMA is a collaboration of UCB (University of California, Berkeley) and KHU.
• GOMX-1, a 2U CubeSat of GomSpace ApS of Aalborg, Denmark.
• NEE-02 Krysaor, a CubeSat of EXA (Ecuadorian Civilian Space Agency)
• FUNCube-1, a CubeSat of AMSAT UK.
• HiNCube (Hogskolen i Narvik CubeSat), a CubeSat of NUC (Narvik University College), Narvik, Norway.
• ZACUBE-1 (South Africa CubeSat-1), a 1U CubeSat (1.2 kg) of CPUT (Cape Peninsula University of Technology), Cape Town, South Africa.
• UWE-3, a CubeSat of the University of Würzburg, Germany. Test of an active ADCS for CubeSats.
• First-MOVE (Munich Orbital Verification Experiment), a CubeSat of TUM (Technische Universität München), Germany.
• Velox-P2, a 1U CubeSat of NTU (Nanyang Technological University), Singapore.
• OPTOS (Optical nanosatellite), a 3U CubeSat of INTA (Instituto Nacional de Tecnica Aerospacial), the Spanish Space Agency, Madrid.
• Dove-3, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
• CubeBug-2, a 2U amateur radio CubeSat of Argentina (sponsored by the Argentinian Ministry of Science, Technology and Productive Innovation) which will serve as a demonstrator for a new CubeSat platform design.
• BPA-3 (Blok Perspektivnoy Avioniki-3) — or Advanced Avionics Unit-3) of Hartron-Arkos, Ukraine.
Deployment of CubeSats: Use of 9 ISIPODs of ISIS, 3 XPODs of UTIAS/SFL, 2 PEPPODs of GAUSS, and 1 MRFOD of MSU.
Orbit: Sun-synchronous near-circular orbit, altitude = 600 km x 835 km, inclination = 97.8º, LTDN (Local Time on Descending Node) = 10:30 hours.
Mission Status
• ADS-B payload fault: On May 7, 2014, the ADS-B payload showed an increased power draw during a nominal ground station pass. In response, the subsystem was power cycled from the ground via the CSP interface. After this power cycle, the subsystem booted up but was not responsive to queries. 15)
- Although the ADS-B payload mission has ended, the mature GOMX stack continues its stable performance. Further GOMX-1 experiments involving the NanoCam and system software are in progress.
- The GOMX-1 spacecraft and mission has successfully shown that a 2 kg can contribute to development of new space based services by demonstrating the feasibility of space based air traffic monitoring. GOMX-1 will continue to operate in the coming years and the ability to upload new software to the on-board computer and payload FPGA will be exploited to further improve the system. The future will tell if commercial space based services can be developed from this technology using a nanosatellite approach.
• May 2014: The satellite continues to operate efficiently with payload data being received on all ground station passes. The spacecraft is in excellent health and is expected to continue operations in the coming years. The downlinked payload data is currently being used for evaluation of the feasibility and expected performance of future nanosatellite constellations for global ADS-B monitoring. 16)
The future potential uses for spaceborne ADS-B are many and range from the optimization of air space procedures based on statistical data from a few nanosatellites to an operational real-time system (utilizing geo-stationary satellites for data relay) of 40-70 active nanosatellites. One application of a fully deployed constellation could be the reduction of required separation of transoceanic flight allowing up to, in theory, 16 times as many aircraft on the most fuel- efficient routes.
• April 2014 status of GOMX-1: 17)
- Automatic: Position and velocity information is automatically transmitted periodically (at least once every second) without flight crew or operator input. Other parameters in the transmission are preselected and static.
- Dependent: The transmission is dependent on proper operation of on-board equipment that determines position and velocity and availability of a sending system.
- Surveillance: Position, velocity, and other airplane information are surveillance data transmitted.
- Broadcast: The information is broadcast to any airplanes or ground station with an ADS-B receiver. Current mode S ATC transponders are interrogated and then send a reply.
• Malaysia Airlines Flight 370 (MH370 was a scheduled international passenger flight from Kuala Lumpur to Beijing that lost contact with air traffic control on 8 March 2014. A multinational search effort, later reported as the largest and most expensive in history, was started. There has been no confirmation of any flight debris and no crash site has been found, resulting in many unofficial theories about its disappearance.
- During the MH370 search operations, there was strong interest in the GOMX-1 mission and the possibility of the mission to contribute data to the investigation. While GOMX-1 has received ADS-B data from the specific Boeing 777 airframe of the MH370 flight on many occasions; however, unfortunately the GOMX-1 satellite was not over the area at the time the MH370 disappeared. Had GOMX-1 been in the area, there is a possibility at least that spaceborne ADS-B data could have helped to understand exactly when the aircraft transponder was shut down and what the location of the aircraft was at that time (Ref. 16).
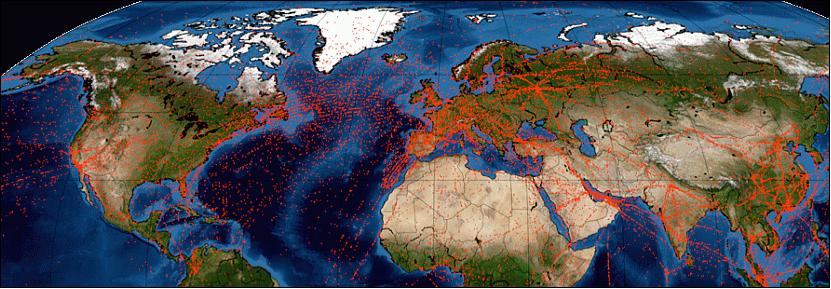
• Feb.19, 2014: The GOMX-1 spacecraft is operating nominally. The project is currently using the satellite to capture various samples both raw and decoded ADS-B data for analysis that feeds into the next generation receiver. Figure 9 shows overview data from the Northern hemisphere acquired during the first week of December 2013.
• During commissioning, it was found that the satellite residual dipole moment is much higher than anticipated and this provides problems for the 3-axis control modes of the spacecraft and the satellite is effectively currently only two-axis stabilized, meaning that the antenna is not always downward pointing.
- The root cause of this issue has been identified as magnetization of the helix antenna after the last check-out. The helix antenna product is now being updated to use materials that cannot be magnetized. Investigation of improvements of the ADCS algorithms to cope with this disturbance on GOMX-1 is under investigation and will potentially be uplinked to the satellite (Ref. 16).
• Nov. 25, 2013: GOMX-1 is now fully commissioned. Switch to autonomous operations outside office hours.
The attitude control system has detumbled the spacecraft from rather high tip-off rates, and all deployables including the helical antenna are deployed. Both payloads are in full operational state. The primary payload - a software defined ADS-B receiver - has received a large amount of aircraft signals indicating a better than expected link-budget on the helical antenna. 18)
• Nov. 23, 2013: On the second day of operations the ADS-B antenna was deployed and aircraft position reports were immediately received thereafter. Further, the satellite was de-tumbled from a post-deployment spin-rate of 23º/s using the ADS-B system (Ref. 16).
- First file-based operations
- TLE (Two-Line Element) object identified.
• Nov. 22, 2013: During the first day of operations two-way communication was established, housekeeping data downlinked and the maximum power point tracking mode of the solar panels was enabled.
- Active detumble of the satellite GOMX-1
- ADS-B antenna release and confirmation
- First ADS-B data retrieved.
Sensor Complement
SDR (Software Defined Radio)
Background: The ADS-B (Automatic Dependent Surveillance – Broadcast) signal consists of a periodically transmitted set of data packages, which are broadcasted using an aircraft's Mode-S transponder at 1090 MHz, and which provides information key data such as aircraft ID, position, altitude and intent (Ref. 5).
The signal is received by terrestrial ground stations and used in operational air traffic control in the same manner as information from air surveillance radars; in fact, traditional radars are now being out phased and replaced with ADS-B receivers, which provide a reduced maintenance cost to operators.
The ADS-B system is today standard equipment on new commercial aircraft and it is estimated that 70% of the current fleet is equipped. Recent decisions taken by the various aviation authorities such as Eurocontrol (Brussels) and FAA (Washington DC) means that ADS-B will become mandatory equipment on all high performance aircraft from 2015 and 2020, respectively.
The ADS-B system is designed to provide a range of 80 NM (Nautical Miles) meaning e.g. that oceanic coverage is very limited and it is also expensive to cover large land areas with poor infrastructure using terrestrial receiving stations.
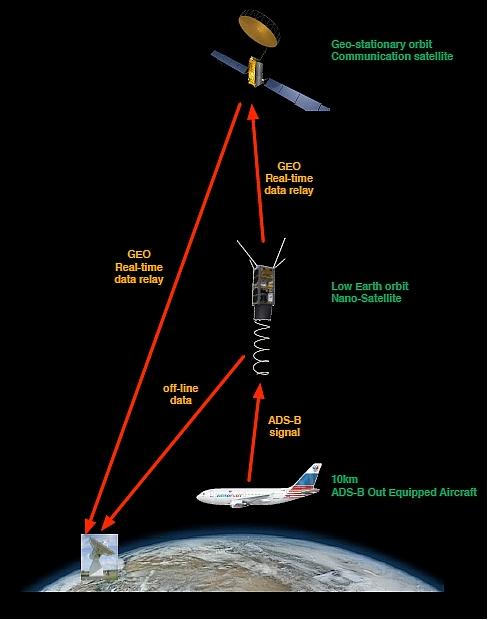
Nanosatellite spaceborne ADS-B concepts: Spaceborne ADS-B is the idea to place sensitive receivers on board satellite in (low earth) orbit, which can receive ADS-B packages and relay these to the relevant stakeholders. GomSpace is working on two concepts for utilizing nanosatellites to provide spaceborne ADS-B service (Figure 10).
Offline data: A small fleet of satellites (3-6) sampling the air spaces and providing information for mainly statistical processing off-line. The data is downlinked with delay when passing by one or more ground stations.
Online data: A larger fleet (40-70) of satellites is connected to the air traffic control infrastructure via geostationary data relay satellites in near real-time. This could be realized using e.g. the SB-SAT for the Inmarsat BGAN network, which is in development. 19)
Business Case: While certainly an interesting idea, spaceborne ADS-B needs to bring economical benefits to the table to be viable and worthy of investment. For the offline concept, which is only a modest investment, value can be generated by analyzing past data providing proof-of-flight information as sampled by the satellites. This information can be used for example:
• Improvement in en-route charging calculations increasing yield 1-2% over charges calculated from posted flight plans.
• Second source on plane routes and prior locations as an input to national security intelligence gathering.
• Improvement of oceanic air space operating procedures based on usage patterns documented by spaceborne ADS-B to increase air space efficiency.
Clearly, as the number of satellites in the constellation increases, the better a service can be provided. For the online concept, requiring significant investment, offering global full-time situational awareness of the air traffic situation, additional user cases are possible:
• Application to search and rescue situations allowing the position of air crafts in distress to be reported immediately, unlike e.g. the situation with the crashed Air France flight AF447 in 2009 for which the crash position was not known – in fact it was only when the air craft did not show up in Paris much later that air traffic controller became worried.
• Operational air traffic control in which air traffic controller directly manages flights based on spaceborne ADS-B in areas that are today not covered by radar or ADS-B. This will allow significant reduction in the inter air craft spacing and provides benefits in terms of reduced fuel consumption (and emissions), reduced flight time and greater air space capacity. To be of full value, however, a robust radio link must be available to the cockpit for the air traffic controller to interact with the pilot.
GomSpace estimates that the potential benefits to the air traffic sector from a fully deployed spaceborne ADS-B infrastructure with global coverage are on the order of one Billion US dollars, with a large share of that value potentially being generated over the North-Atlantic area.
Nav Canada, who are a strong proponent of ADS-B technology, are investing heavily in increasing the coverage of their terrestrial ADS-B network in the Hudson Bay area and in south Greenland – an area that sees a lot of the trans-Atlantic traffic to and from Europe. They estimate that their investments in this geographical area will bring about fuel cost saving of $187 million USD annually. 20)
ADS-B Receiver Payload
A top-level block diagram of the ADS-B receiver payload is provided in Figure 11. The antenna is a deployable helical antenna depicted on Figure 2, which provides 10 dB of gain at 1090 MHz.
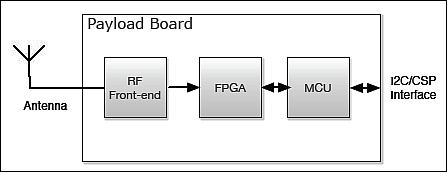
The RF front-end provides amplification and initial down-conversion of the signal. To compensate for the increased path-loss due to the receiver location in space in contrast to the 80 NM nominal range of the system, the RF front-end has carefully been designed to provide the required sensitivity to be able to decode the signal.
The FPGA samples the down-converted signals and run the decoding algorithms. The FPGA can be reconfigured with new bit-code during the mission and this feature will be used to improve operational performance of the payload during the mission based on the feedback gained from operating it in space.
The FPGA transfers decoded packages to the microcontroller unit that stores the data in a (in memory) database that can be queried over the CSP (CubeSat Space Protocol) network providing wide opportunities to extract ADS-B data and meta-data on system performance.
ADS-B Signal Structure: The ADS-B message consists of a preamble and a data block. The preamble makes it possible to synchronize the local clock to the ADS-B message, since it is received non-coherently. The preamble is 8 µs long and consists of four pulses at specific times. The preamble is followed by the data block, which consists of 112 bits. The data block contains information about the aircraft like the unique aircraft ID, call sign, position, velocity etc. In Figure13 the form of a ADS-B message is shown. It is seen that each bit in the data block is 1 µs long giving a symbol rate of 1 MHz.

The ADS-B message is binary pulse position modulated (BPPM) onto a carrier wave, which has a frequency of 1090 MHz. The carrier frequency is in the L-band, which is used for aeronautical radio navigation and is allowed to deviate with ±1 MHz.
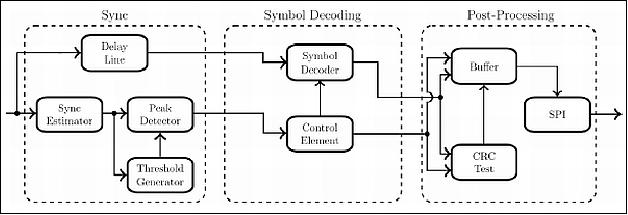
Decoder Example: Figure 14 illustrates one of the decoder architectures that have been tested in the project, namely the correlation-based one, where both the synchronization and decoding rely on (low complexity) correlations techniques.
Operational Evaluation
Data will be downlinked to the primary ground station in Denmark on every pass of the satellite. In order to evaluate the performance of spaceborne ADS-B data, it will be systematically correlated with information obtained from ground based radars and ADS-B receiving stations bordering the north-Atlantic oceanic area.
DSE Airport Solutions of Aalborg will perform this correlation in the existing SERIS tool, which is a product for archiving, visualizing and processing flight data from multiple data sources. SERIS has been used within some Eurocontrol countries for the past 10 years for en-route charging.
NanoCam
NanoCam is a secondary payload on GOMX-1, a CMOS color camera for Earth observation experimentation.

References
1) Information provided by Lars K. Almide, Managing Director of Gomspace ApS of Aalborg, Denmark.
2) https://web.archive.org/web/20100707072615/http://www.gomspace.com/index.php?p=home
3) Lars Alminde, Karl Kaas Laursen, Morten Bisgaard, “A Strategic Approach to Successful CubeSat Missions,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
4) Lars K. Almide, “GomSpace -Space Day,” URL: http://space.ku.dk/technology/space_day/GS_PRESENTATION_SpaceDay.pdf/
5) Lars K. Alminde, Johan Christiansen, Karl Kaas Laursen, Anders Midtgaard, Morten Bisgard, Morten Jensen, Bjarke Gosvig, Alex Birklykke, Peter Koch, Yannick Le Moullec, “GomX-1: A Nano-satellite Mission to Demonstrate Improved Situational Awareness for Air Traffic Control,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-I-6, URL of paper: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1019&context=smallsat , URL of presentation: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?filename=0&article=1019&context=smallsat&type=additional
6) “NanoPower Modules,” GomSpace, URL: https://web.archive.org/web/20160404141736/http://gomspace.com/index.php?p=products-p31u
7) “NanoCom Spacelink Modules,” GomSpace, URL: https://web.archive.org/web/20160913031601/http://gomspace.com/index.php?p=products-u482c
8) “The Cubesat Space Protocol,” URL: https://github.com/GomSpace/libcsp
9) Søren Pedersen, Karl Kaas Laursen, “CubeSat Space Protocol and Nano-Satellite Integration,” AIAA SF/SVSC Small Payloads TechTalks, Mountain View, CA, USA, April 16, 2012, URL: http://www.aiaa-sf.org/techtalks/2012/0416.html
10) “Dnepr Cluster Mission 2013,” ISC Kosmotras, Nov. 21, 2013, URL: https://web.archive.org/web/20131125042753/http://www.kosmotras.ru/en/news/149/
11) Patrick Blau, “Dnepr Rocket successfully launches Cluster of 32 Satellites,” Spaceflight 101, Nov. 21, 2013, URL: http://www.spaceflight101.com/denpr-2013-cluster-launch-updates.html
12) “2013 in spaceflight,” Wikipedia, Nov. 21, 2013, URL: http://en.wikipedia.org/wiki/2013_in_spaceflight#November
13) “Russian Dnepr conducts record breaking 32 satellite haul,” NASA Spaceflight.com, Nov. 21, 2013, URL: http://www.nasaspaceflight.com/2013/11/russian-dnepr-record-breaking-32-satellite-haul/
14) “PUCPSat-1 Satellite Project,” URL: http://inras.pucp.edu.pe/pucpsat1/index.html
15) Lars K. Alminde, Karl Kaas, Morten Bisgaard, Johan Christiansen, David Gerhardt, “GOMX-1 Flight Experience and Air Traffic Monitoring Results,” Proceedings of the AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, paper: SSC14-XII-7, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3078&context=smallsat
16) Lars K. Alminde, Karl Kaas, Morten, Bisgaard, Johan Christiansen, “GOMX-1 Flight Experience and Air Traffic Monitoring Results,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
17) Søren Pedersen, “Air Traffic Control from Space using Nano-Satellites,” Proceedings of the 11th Annual CubeSat Developers’ Workshop - The Edge of Exploration,” San Luis Obispo, CA, USA, April 23-25, 2014, URL: http://www.cubesat.org/.../Pedersen_Air_Traffic_Control_from_Space.pdf
18) https://web.archive.org/web/20140225071746/http://gomspace.com/index.php?p=gomx1
19) R. Goldsmith,E. Trachtman, C. Lenz, C. McCormick, ““24/7 Access to LEO Spacecraft TTC and Payload Data using the Inmarsat BGAN Service,” 5th ESA International Workshop on Tracking, Telemetry and Command Systems for Space Applications, Noordwijk, The Netherlands, Sept. 21-23, 2010, URL: http://www.comdev.ca/docs/FCXNL-10A07-1882338-1-goldsmith_ttc_PAPER.pdf
20) Adrian Schofield, “Northern Network -Nav Canada prepares for next steps in bringing ADS-B coverage to major intercontinental air routes,” Aviation Week & Space Technology, March 8, 2010, p. 42, URL: http://www.navcanada.ca/EN/media/Publications/In%20the%20News/Northern-Network-EN.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top